Изобретение относится к области диагностики железнодорожного транспорта и может быть использовано для автоматизации проверки наличия компонентов ходовой части железнодорожных вагонов.
Известно устройство для непрерывного захвата изображения с высоким разрешением подвагонного пространства двигающегося поезда, содержащее на участке железнодорожного пути датчики для фиксации прохождения колёс вагона, что позволяет точно рассчитать скорость поезда с использованием специального алгоритма. При расчете скорости поезда активируется программное обеспечение для взаимодействия с устройством, размещённым на шпалах и имеющим камеру, предназначенную для получения изображений ходовой части поезда с высоким разрешением. С помощью этого программного обеспечения регулируется частота кадров задействованной камеры. Полученные изображения передаются на сервер, где в дальнейшем пользователь может их просмотреть (US10523858B1, H04N 5/232, 31.12.2019).
Недостатком известного технического решения является отсутствие автоматической проверки наличия элементов ходовой части поезда, бесконтактного измерения линейных величин механизмов ходовой части поезда, а также контроля ходовой части вагона поезда типа хоппер.
Наиболее близким аналогом к предлагаемому техническому решению является система мониторинга железнодорожных грузовых вагонов, содержащая подсистему сбора информации, которая отвечает за управление периферийным оборудованием для обнаружения поезда на пути и получение изображений с помощью линейных камер, которые передает по сети на сервер, подсистему идентификации деталей, отвечающую за получение данных о вагоне, идентификацию неисправных деталей, отправку тревожных сообщений, подсистему просмотра, которая обеспечивает инспектору удалённый доступ к изображениям железнодорожного вагона в режиме реального времени и сообщениям о неисправностях (CN109299723A, G06K 9/46, 01.02.2019).
Известная система идентифицирует неисправные детали ходовой части вагонов поезда в автоматическом режиме.
Однако известная система не позволяет в автоматическом режиме осуществлять бесконтактное измерение линейных величин механизмов ходовой части поезда, а также контроль ходовой части вагона поезда типа хоппер.
Технический результат предлагаемого изобретения заключается в повышении надежности контроля ходовой части подвагонного пространства за счет своевременного выявления отсутствия компонентов ходовой части подвагонного пространства, бесконтактного измерения линейных величин механизмов на ходу поезда в автоматическом режиме без участия человека и последующим принятии решения о дальнейшей эксплуатации подвижного состава, автоматизации процесса контроля, а также расширения функциональных возможностей за счет автоматического контроля компонентов ходовой части вагонов типа хоппер.
Технический результат достигается тем, что система контроля сохранности элементов подвижного состава содержит установленные на измерительном участке датчики счёта осей, напольный конструктив, установленный между рельсами и снабженный заслонками с блоком управления, в котором размещен модуль контроля подвагонного пространства подвижного состава, включающий матричные камеры машинного зрения с блоками подсветки, модуль интеллектуальной обработки информации, входы которого подключены к выходам камер машинного зрения, а выход - к сети передачи данных для взаимодействия с аппаратно-программным устройством автоматизированного рабочего места оператора центра дистанционного контроля, установленный в шкафу коммутации и управления контроллер, входы которого соединены с выходами датчиков счета осей, модуль воздушной защиты матричных камер для обеспечения зашиты объективов матричных камер машинного зрения от загрязнений, при этом датчики счёта осей установлены на заданном расстоянии перед напольным конструктивом относительно направления движения поезда с внутренней стороны рельса и выходами подключены к входам контроллера, выходы которого соединены с входами управления модуля воздушной защиты, блоком управления заслонками напольного конструктива, блоками подсветки камер машинного зрения и глобальными затворами матричных камер машинного зрения и с другим входом модуля интеллектуальной обработки информации, выполненным с возможностью обработки и анализа изображений подвагонного пространства подвижного состава для идентификации авторежима тормозной рычажной передачи, авторегулятора тормозной рычажной передачи, определения размера «А» рычажного привода авторегулятора и размера «а» от торца защитной трубы авторегулятора до начала присоединительной резьбы винта.
Система содержит также элементы защиты от волочащихся предметов, установленные между рельсами по обе стороны от напольного конструктива.
Для контроля компонентов ходовой части вагонов типа хоппер система содержит боковые матричные камеры машинного зрения с блоками подсветки, каждая из которых установлена на опоре под углом относительно горизонтали для регистрации изображения шасси проходящего подвижного состава, при этом опоры установлены по обе стороны железнодорожного пути на заданном расстоянии, выходы каждой боковой матричной камеры подключены к соответствующему входу модуля интеллектуальной обработки, а вход управления и вход управления ее блока подсветки - с другими выходами контроллера.
Система контроля сохранности элементов подвижного состава поясняется чертежами на фиг. 1-4.
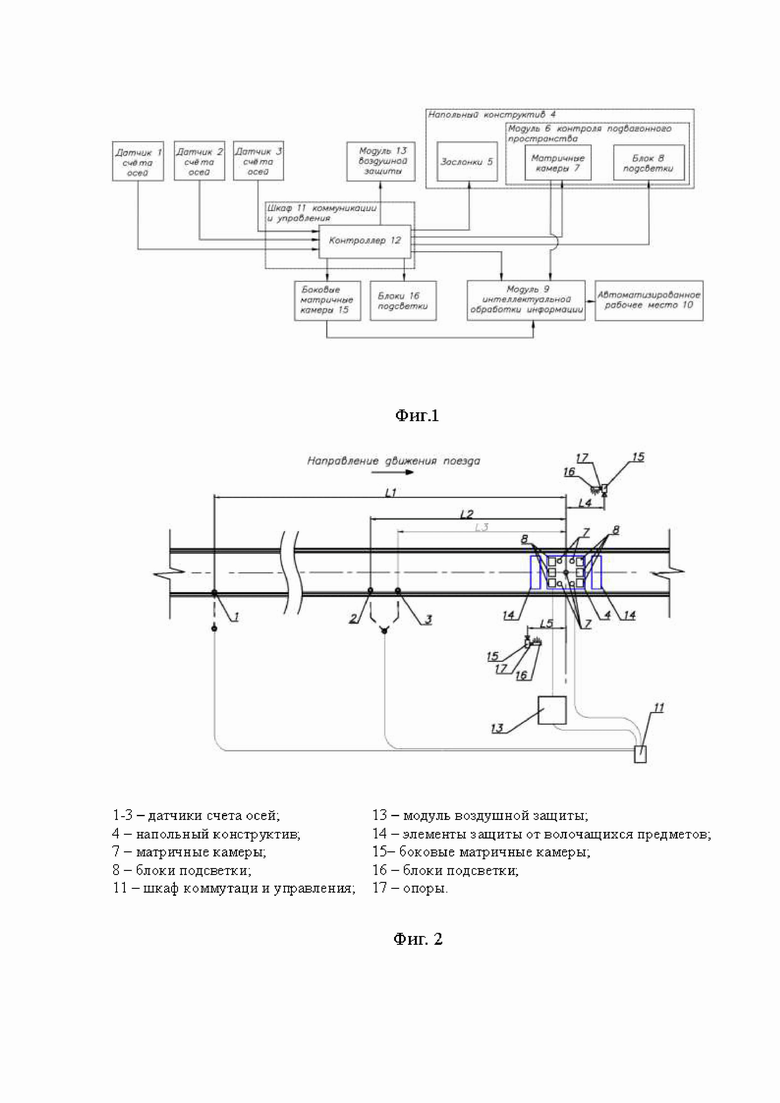
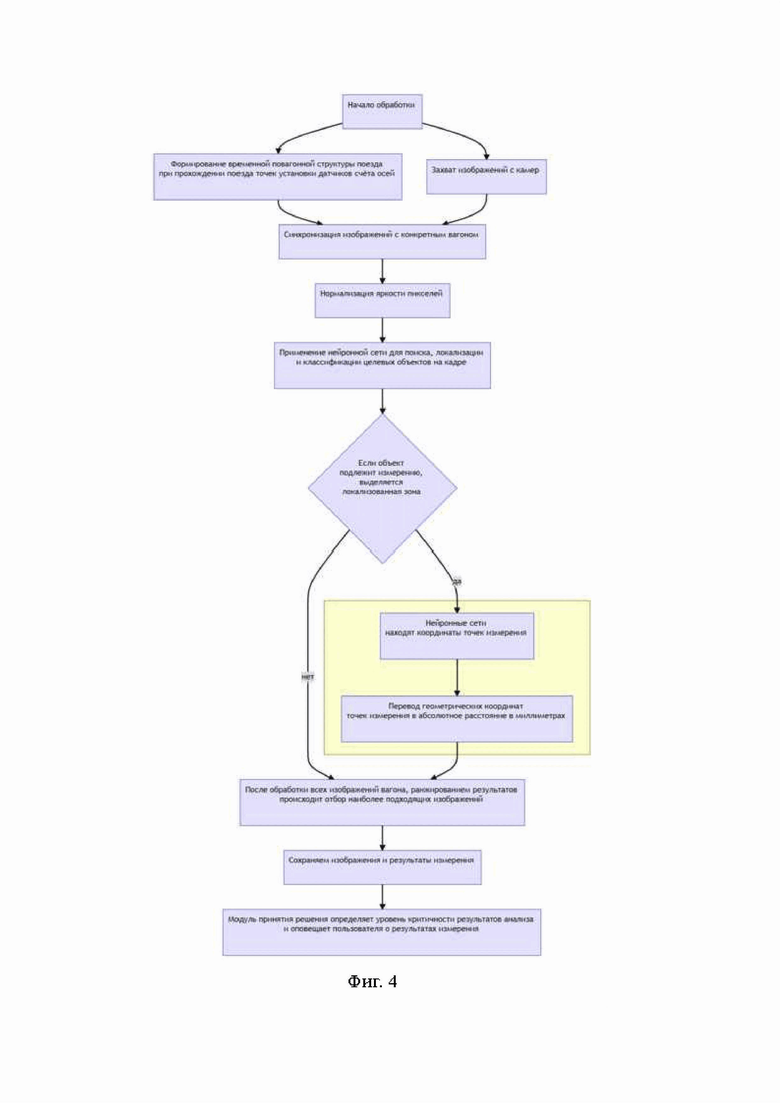
На фиг. 1 представлена структурная схема системы контроля сохранности элементов подвижного состава; на фиг. 2 -общий вид размещения элементов системы контроля сохранности элементов подвижного состава на железнодорожной пути; на фиг. 3 - общий вид размещения модуля контроля подвагонного пространства с камерами в межрельсовом пространстве и боковых камер на опорах; на фиг. 4 – блок-схема алгоритма обработки и анализа изображений.
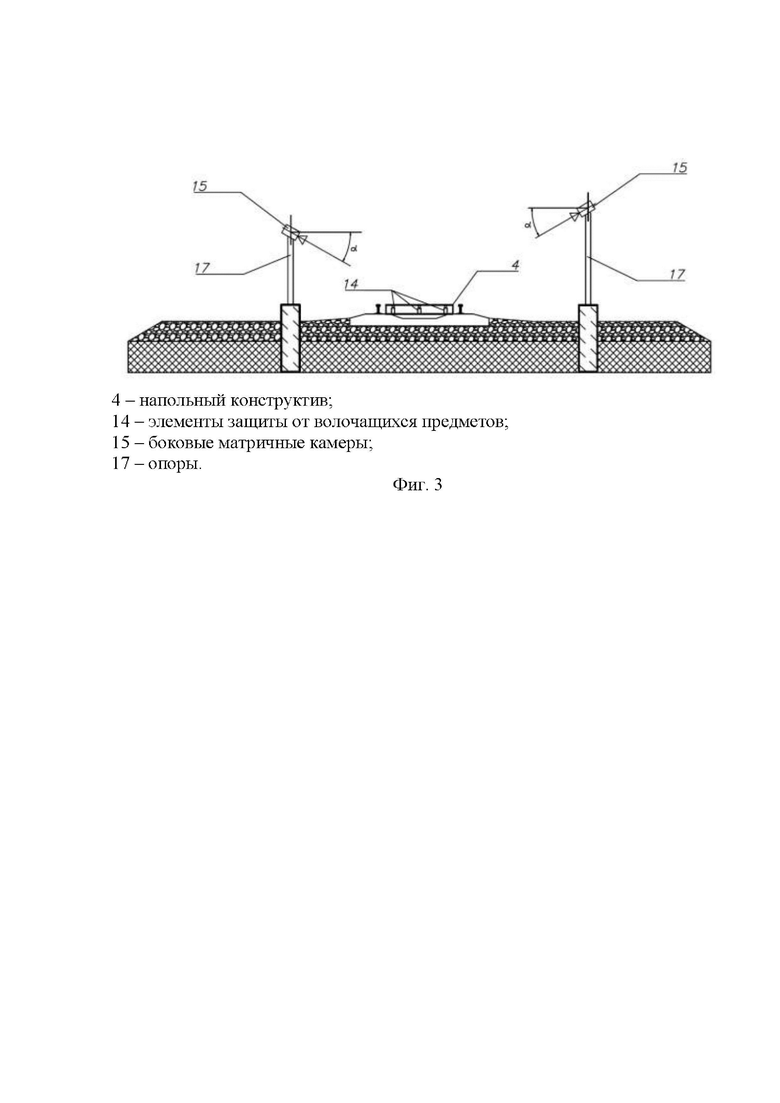
Система контроля сохранности элементов подвижного состава содержит установленные на измерительном участке датчики 1-3 счёта осей, напольный конструктив 4, установленный между рельсами и снабженный заслонками 5 с блоком управления (на чертеже не показан), в котором размещен модуль 6 контроля подвагонного пространства подвижного состава, включающий матричные камеры 7 машинного зрения с блоками 8 подсветки, модуль 9 интеллектуальной обработки информации, входы которого подключены к выходам матричных камер 7, а выход к сети передачи данных (на чертеже не показана) для взаимодействия с аппаратно-программным устройством автоматизированного рабочего места 10 оператора центра дистанционного контроля, установленный в шкафу 11 коммутации и управления контроллер 12, входы которого соединены с выходами датчиков 1-3 счета осей, модуль 13 воздушной защиты камер от загрязнений, включающий воздуходувку, воздушные магистрали которой размещены в конструктиве 4 для обеспечения защиты объективов матричных камер 7 от загрязнений (на чертеже не показаны).
При этом датчики 1-3 счёта осей установлены на заданном расстоянии перед напольным конструктивом 4 относительно направления движения поезда с внутренней стороны рельса и выходами подключены к входам контроллера 12, выходы которого соединены с входами управления модуля 13 воздушной защиты камер от загрязнений, блока управления заслонками 5, блоков 8 подсветки матричных камер 7 и глобальными затворами матричных камер 7 машинного зрения, а также и с другим входом модуля 9 интеллектуальной обработки информации, выполненным с возможностью обработки и анализа видеоизображения подвагонного пространства подвижного состава для идентификации авторежима тормозной рычажной передачи, авторегулятора тормозной рычажной передачи, определения размера «А» рычажного привода авторегулятора и размера «а» от торца защитной трубы авторегулятора до начала присоединительной резьбы винта.
Система содержит элементы 14 защиты от волочащихся предметов, установленные между рельсами по обе стороны от напольного конструктива 4, а также боковые матричные камеры 15 машинного зрения с блоками 16 подсветки, каждая из которых установлена на опоре 17 под углом относительно горизонтали для регистрации изображения шасси проходящего подвижного состава. Опоры 17 установлены по обе стороны железнодорожного пути на заданном расстоянии. Выходы каждой боковой матричной камеры 15 подключены к соответствующему входу модуля 9 интеллектуальной обработки информации, а вход управления и вход управления ее блока 16 подсветки - с другими выходами контроллера 12.
Система контроля сохранности элементов подвижного состава работает следующим образом.
В исходном состоянии система контроля сохранности элементов подвижного состава находится в режиме ожидания. Блоки подсветки 8, 16 и модуль воздушной защиты 13 выключены, заслонки 5 закрыты, матричные камеры машинного зрения 7 и 15 съёмку не производят.
При прохождении поезда с выхода датчика 1 счёта осей, установленного на расстоянии L1 относительно модуля 6 контроля подвагонного пространства (фиг. 2), сигнал поступает в контроллер 12. Контроллер 12 открывает заслонки 5 матричных камер 7 модуля 6 контроля подвагонного пространства, включает модуль 13 воздушной защиты, создающий воздушный напор, защищающий матричные камеры 7 машинного зрения модуля 6 контроля подвагонного пространства от загрязнений. После прохождения датчиков счёта осей 2 и 3, установленных на расстоянии L2 и L3, контроллер 12 включает модули 8 и 16 подсветки освещающие зоны фотосъёмки и регулирует частоту кадров съёмки, управляя глобальными затворами матричных камер 7 машинного зрения в зависимости от скорости движения поезда, рассчитанную с помощью датчиков счёта осей 2 и 3.
В отличие от рассмотренных аналогов, в системе контроля сохранности элементов подвижного состава используются боковые матричные камеры 15 машинного зрения, направленные на шасси проходящего поезда (фиг. 3). Наличие боковых камер 15 машинного зрения позволяет проводить съёмку компонентов ходовой части вагонов типа хоппер.
При прохождении поезда датчиков 1, 2 и 3 счета осей в модуле 9 интеллектуальной обработки информации, в соответствии с алгоритмом (фиг. 4), начинается обработка изображений, формируется временная повагонная структура поезда, с помощью которой захваченные изображения синхронизируются с конкретным вагоном. В полученных изображениях нормализуется яркость пикселей. Для поиска, локализации и классификации компонентов ходовой части железнодорожных вагонов, в том числе авторежима тормозной рычажной передачи, авторегулятора тормозной рычажной передачи используется нейронная сеть. Зоны изображения для определения размера «А» рычажного привода авторегулятора и размера «а» от торца защитной трубы авторегулятора до начала присоединительной резьбы винта выделяются и поступают для обработки в нейронные сети, где происходит определение координат точек измерения. Геометрические координаты точек измерений переводятся в абсолютное расстояние в миллиметрах. После обработки всех изображений вагона, ранжированием результатов выбираются наиболее подходящие изображения с исследуемыми и измеряемыми объектами. Результаты обработки информации сохраняются и доступны для просмотра пользователю в виде отчёта на автоматизированном рабочем месте 10. Если при анализе изображения выявляется отсутствие компонентов ходовой части железнодорожного вагона, в том числе авторежима тормозной рычажной передачи, авторегулятора тормозной рычажной передачи или отклонение измеряемых величин за рамки допустимых значений: размера «А» рычажного привода авторегулятора и размера «а» от торца защитной трубы авторегулятора до начала присоединительной резьбы винта, то тревожная информация отображается в пользовательском интерфейсе автоматизированного рабочего места, с возможностью просмотра изображения вагона.
Таким образом, предлагаемое изобретение обеспечивает автоматический контроль отсутствия компонентов ходовой части железнодорожного вагона, в том числе авторежима тормозной рычажной передачи, авторегулятора тормозной рычажной передачи или отклонение измеряемых величин за пределы допустимых значений: размера «А» рычажного привода авторегулятора и размера «а» от торца защитной трубы авторегулятора до начала присоединительной резьбы винта непосредственно после прохождения поезда через систему с возможностью просмотра полученных изображений вагонов в высоком разрешении, а также автоматический контроль отсутствия компонентов ходовой части вагонов вагонов типа хоппер на ходу поезда.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННЫЙ ПОСТ АВТОМАТИЗИРОВАННОГО ПРИЕМА И ДИАГНОСТИКИ ПОДВИЖНОГО СОСТАВА (ПРИЗМА) | 2019 |
|
RU2720603C1 |
| Система контроля готовности фронта к проведению машинизированной выправки железнодорожного пути | 2022 |
|
RU2793867C1 |
| СПОСОБ ИСПЫТАНИЙ ТОРМОЗНОГО ОБОРУДОВАНИЯ ВАГОНА | 2008 |
|
RU2391234C2 |
| Устройство определения параметров узлов подвижного состава | 2016 |
|
RU2668774C2 |
| ВАГОН-ЛАБОРАТОРИЯ ИСПЫТАНИЙ КОНТАКТНОЙ СЕТИ | 2023 |
|
RU2806925C1 |
| ТОРМОЗНАЯ СИСТЕМА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2322367C2 |
| Двухтрубная тормозная система железнодорожного подвижного состава | 2020 |
|
RU2740624C1 |
| Система интервального регулирования движения поездов на базе радиоканала | 2016 |
|
RU2618660C1 |
| Система технического и коммерческого контроля состояния поездов | 2019 |
|
RU2728202C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ВЫЯВЛЕНИЯ ОТСУТСТВУЮЩИХ ЭЛЕМЕНТОВ ГРУЗОВОГО ВАГОНА В КРУГЛОСУТОЧНОМ РЕЖИМЕ | 2023 |
|
RU2815254C1 |
Изобретение относится к автоматическим средствам диагностики железнодорожного транспорта во время движения. Система содержит установленные на измерительном участке датчики (1-3) счёта осей, напольный конструктив (4), установленный между рельсами и снабженный заслонками (5) с блоком управления, в котором размещен модуль (6) контроля подвагонного пространства подвижного состава, включающий матричные камеры (7) машинного зрения с блоками 8 подсветки, модуль (9) интеллектуальной обработки информации, АРМ (10) оператора центра дистанционного контроля, установленный в шкафу (11) коммутации и управления контроллер (12), модуль (13) воздушной защиты камер от загрязнений, включающий воздуходувку. Причем система также включает элементы (14) защиты от волочащихся предметов, боковые матричные камеры (15) машинного зрения с блоками (16) подсветки, каждая из которых установлена на опоре (17) под углом относительно горизонтали для регистрации изображения шасси проходящего подвижного состава. Достигается повышение надежности контроля ходовой части подвагонного пространства. 2 з.п. ф-лы, 4 ил.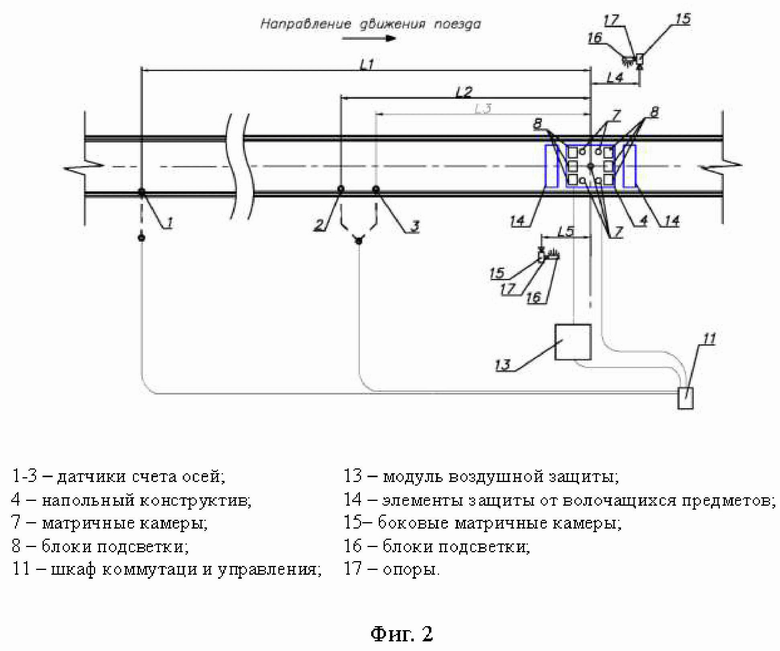
1. Система контроля сохранности элементов подвижного состава, характеризующаяся тем, что содержит установленные на измерительном участке датчики счёта осей, напольный конструктив, установленный между рельсами и снабженный заслонками с блоком управления, в котором размещен модуль контроля подвагонного пространства подвижного состава, включающий матричные камеры машинного зрения с блоками подсветки, модуль интеллектуальной обработки информации, входы которого подключены к выходам камер машинного зрения, а выход - к сети передачи данных для взаимодействия с аппаратно-программным устройством автоматизированного рабочего места оператора центра дистанционного контроля, установленный в шкафу коммутации и управления контроллер, входы которого соединены с выходами датчиков счета осей, модуль воздушной защиты камер от загрязнений, при этом датчики счёта осей установлены на заданном расстоянии перед напольным конструктивом относительно направления движения поезда с внутренней стороны рельса и выходами подключены к входам контроллера, выходы которого соединены с входами управления модуля воздушной защиты матричных камер от загрязнений, блока управления заслонками напольного конструктива, блоков подсветки камер машинного зрения и глобальными затворами матричных камер машинного зрения и с другим входом модуля интеллектуальной обработки информации, выполненным с возможностью обработки и анализа изображений подвагонного пространства подвижного состава для идентификации авторежима тормозной рычажной передачи, авторегулятора тормозной рычажной передачи, определения размера «А» рычажного привода авторегулятора и размера «а» от торца защитной трубы авторегулятора до начала присоединительной резьбы винта.
2. Система по п. 1, отличающаяся тем, что введены элементы защиты от волочащихся предметов, установленные между рельсами по обе стороны от напольного конструктива.
3. Система по любому из пп. 1 и 2, отличающаяся тем, что содержит на измерительном участке дополнительные матричные камеры машинного зрения с блоками подсветки, каждая из которых установлена на опоре под углом относительно горизонтали для регистрации изображения шасси проходящего подвижного состава, при этом опоры установлены по обе стороны железнодорожного пути на заданном расстоянии, выходы каждой дополнительной матричной камеры подключены к соответствующему входу модуля интеллектуальной обработки, а вход управления и вход управления ее блока подсветки - с другими выходами контроллера.
| CN 110595804 A, 20.12.2019 | |||
| CN 111942434 A, 17.11.2020 | |||
| CN 109299723 A, 01.02.2019 | |||
| CN 109238756 B, 25.05.2021 | |||
| Автоматизированная система коммерческого осмотра поездов и вагонов с модульной архитектурой (АСКО ПВ 3.0) | 2018 |
|
RU2713132C1 |
