ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к реализуемому компьютером способу обучения модели машинного обучения обнаружению ошибок установки в лифте, в частности двери лифта, а также реализуемому компьютером способу классификации ошибок установки и соответствующей системе.
Одним из применений изобретения является контроль установки дверей лифта, в частности, дверей шахты лифта и дверей кабины.
Изобретение находит применение также в прогностическом обслуживании и дистанционном мониторинге дверей лифта.
Другое применение изобретения относится к средствам привода лифта, в частности к двигателю, тормозному оборудованию и кодировщику.
Другое применение изобретения относится к предохранительным устройствам, например регулятору превышения скорости, предохранительному устройству, натяжному тросу регулятора и шкиву.
Предусматривается также контроль акселерометров, контроллера преобразователей взвешивания груза и подъема и предохранительных дверных переключателей.
В целом, предлагаемое изобретение применимо к любому компоненту лифта.
УРОВЕНЬ ТЕХНИКИ
Системы мониторинга лифтовой установки, основанные на данных, обнаруженных датчиками, распределенными по установке, уже предлагались в уровне техники.
В документе US 10,196,236 B2, согласно его реферату, предложена система мониторинга лифтовой установки и способ эксплуатации системы мониторинга для генерации данных использования двери лифта. Система мониторинга содержит датчик, расположенный в лифтовой установке, причем по меньшей мере один физический параметр окружающей среды датчика может быть обнаружен датчиком, и блок оценки, который определяет рабочее состояние двери лифта по поведению физического параметра с течением времени.
В документе US 2020/0062542 A1, согласно его реферату, предложены способ и система для определения местоположений кабины лифта, основанные на применении, с помощью процессора, датчика машинного отделения для сбора данных вибрации, связанных с одним или более компонентов в машинном отделении лифтовой системы. Лифтовая система содержит кабину лифта и шахту, а способ анализирует данные вибрации для определения положения кабины лифта в шахте.
Вышеупомянутые решения нацелены на аспекты прогностического обслуживания, но на них по-прежнему влияет низкое качество монтажа. Данные, получаемые датчиками, недостаточны для повышения качества установки, поскольку все еще являются косвенными данными, что означает, что они не подключены непосредственно к дверному приводу.
Необходимо сократить время и затраты, обусловленные неисправными установками. Фактически, лифтовые компании и транснациональные корпорации имеют наибольшее количество обращений в течение шести месяцев с момента выпуска лифта, в основном из-за низкого качества установки. Основным компонентом, вызывающим обращение, обычно является дверь.
Очевидно, что качество установки является ключевым фактором удовлетворенности клиентов.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В этом контексте техническая проблема в основе настоящего изобретения заключается в том, чтобы предложить реализуемый компьютером способ обучения модели машинного обучения обнаружению ошибок установки в лифте, в частности, двери лифта, реализуемый компьютером способ классификации ошибок установки и соответствующую систему их, которые преодолевают вышеупомянутые недостатки предшествующего уровня техники.
В частности, задачей настоящего изобретения является предложение реализуемого компьютером способа обучения модели машинного обучения обнаружению ошибок установки в лифте, в частности, двери лифта, реализуемого компьютером способа классификации ошибок установки и его системы, позволяющей лучше обнаруживать неисправные установки дверей лифта в сравнении с решениям предшествующего уровня техники, тем самым повышая качество процесса установки, в частности, в отношении дверей.
Другой задачей настоящего изобретения является предложение реализуемого компьютером способа и системы для классификации ошибок установки в лифте, в частности двери лифта, которые позволяют более эффективно и просто планировать операции технического обслуживания и мониторинга, тем самым сокращая время сертификации корректной установки.
Другой задачей настоящего изобретения является предложение реализуемого компьютером способа и системы для классификации ошибок установки в лифте, в частности двери лифта, которые уменьшают количество эффектов цепной реакции из-за плохой установки.
Указанные техническая проблема и задачи решаются по существу посредством реализуемого компьютером способа обучения модели машинного обучения обнаружению ошибок установки в лифте, в частности, двери лифта, причем модель машинного обучения представляет собой комбинацию модели Функции Множества (Set Function) и модели Преобразования Фурье (Fourier-Transform), причем способ включает этапы:
- расположение множества датчиков у лифта (101), причем каждый датчик выполнен с возможностью обнаружения физического параметра;
- обнаружение значений физических параметров посредством указанных датчиков для получения набора данных, содержащего по меньшей мере один временной ряд;
- получение первого входного уровня путем извлечения признаков из набора данных;
- получение второго входного уровня путем извлечения признаков из набора данных;
- введение в модель Функции Множества первого входного уровня;
- введение в модель Преобразования Фурье второго входного уровня.
В соответствии с одним аспектом изобретения, набор данных содержит матрицу временных рядов.
В соответствии с одним аспектом изобретения, набор данных дополнительно содержит одно или более статических значений или циклических значений.
В соответствии с одним аспектом изобретения, набор данных дополнительно содержит образцы звука.
Согласно одному аспекту изобретения, извлеченные признаки образцов звука содержат звуковые спектрограммы.
Согласно одному аспекту изобретения, этап обнаружения значений физических параметров посредством датчиков происходит с различной периодичностью в зависимости от типа датчика и соответствующего физического параметра.
Указанные техническая проблема и задачи решаются по существу посредством реализуемого компьютером способа обнаружения ошибок установки в лифте, в частности, двери лифта, причем способ включает этапы:
- обнаружения множества физических параметров посредством датчиков, расположенных у лифта;
- выполнения извлечения первого признака и извлечения второго признака из обнаруженных физических параметров;
- введения первых извлеченных признаков и вторых извлеченных признаков в модель машинного обучения, которая была ранее обучена обнаружению ошибок установки.
Указанные техническая проблема и задачи решаются по существу посредством системы обнаружения ошибок установки в лифте, в частности, двери лифта, содержащей: - множество датчиков, расположенных у лифта и выполненных с возможностью обнаружения физических параметров;
- первый блок извлечения признаков и второй блок извлечения, выполненные с возможностью извлечения признаков из обнаруженных физических параметров;
- модель машинного обучения, состоящую из комбинации модели Функции Множества и модели Преобразования Фурье, выполненных с возможностью обнаружения ошибок установки в ответ на получение извлеченных признаков, поступающих от первого блока извлечения признаков и от второго блока извлечения признаков, причем модель машинного обучения ранее обучена обнаружению ошибок установки.
В соответствии с одним аспектом изобретения, датчики выбраны из следующего: датчик положения, датчик скорости, микрофон.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Дополнительные признаки и преимущества настоящего изобретения станут более понятны из приблизительного и, следовательно, неограничивающего описания предпочтительного, но неисключительного варианта осуществления реализуемого компьютером способа обучения модели машинного обучения обнаружению ошибок установки в лифте, в частности, двери лифта, реализуемого компьютером способа классификации ошибок установки и соответствующей системы, проиллюстрированных на прилагаемых чертежах, на которых:
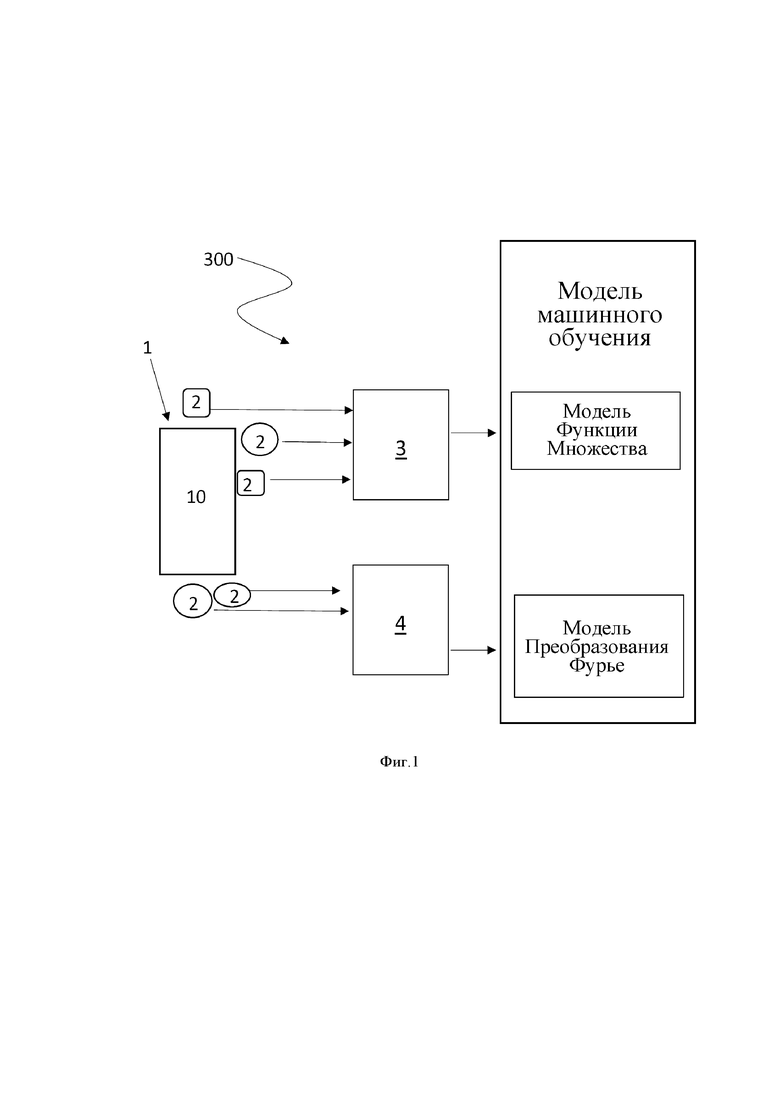
- фиг. 1 иллюстрирует систему классификации ошибок установки в лифте, в частности двери лифта, в соответствии с настоящим изобретением;
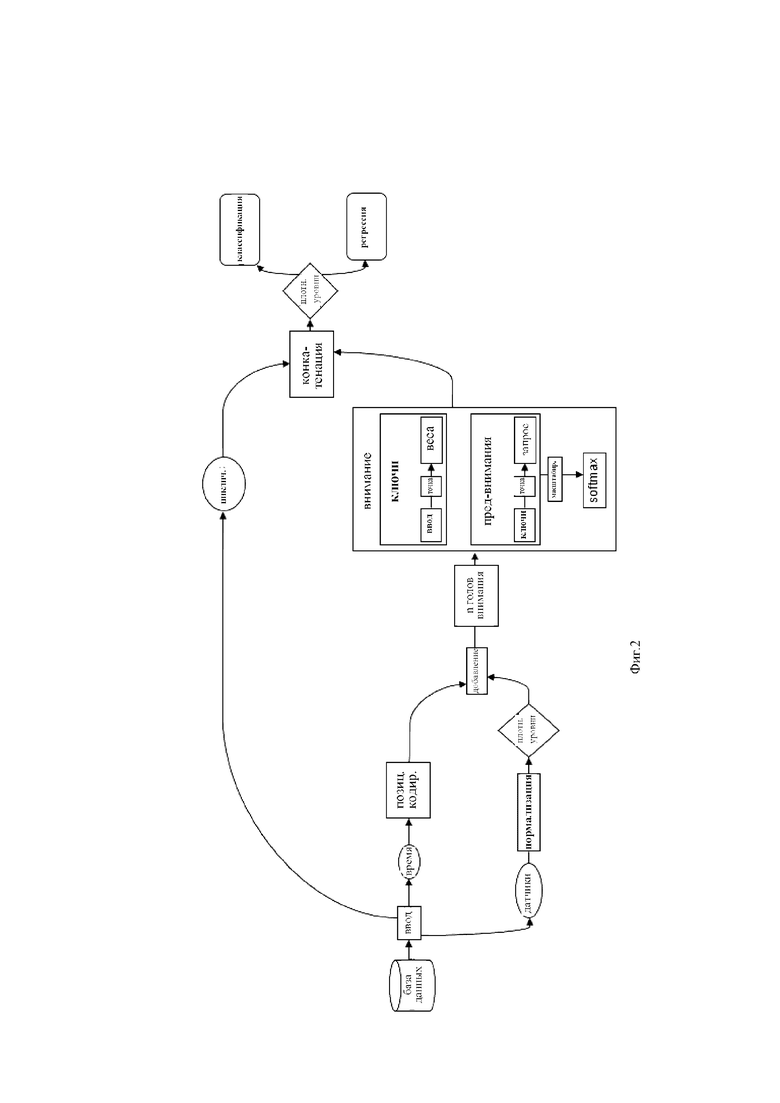
- фиг. 2 представляет собой схематический вид Множества Функций, используемых в реализуемом компьютером способе классификации ошибок установки в лифте, в частности двери лифта, в соответствии с настоящим изобретением;
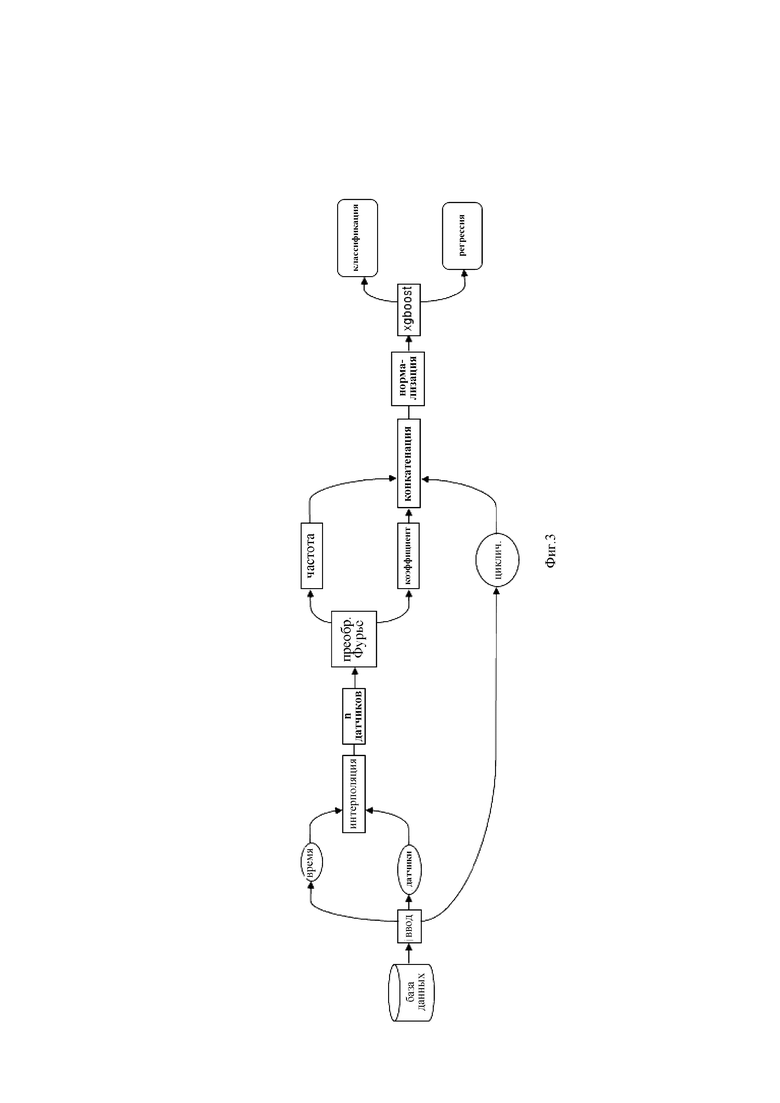
- фиг. 3 представляет собой схематический вид модели БПФ (FFT), используемой в реализуемом компьютером способе классификации ошибок установки в лифте, в частности двери лифта, в соответствии с настоящим изобретением;
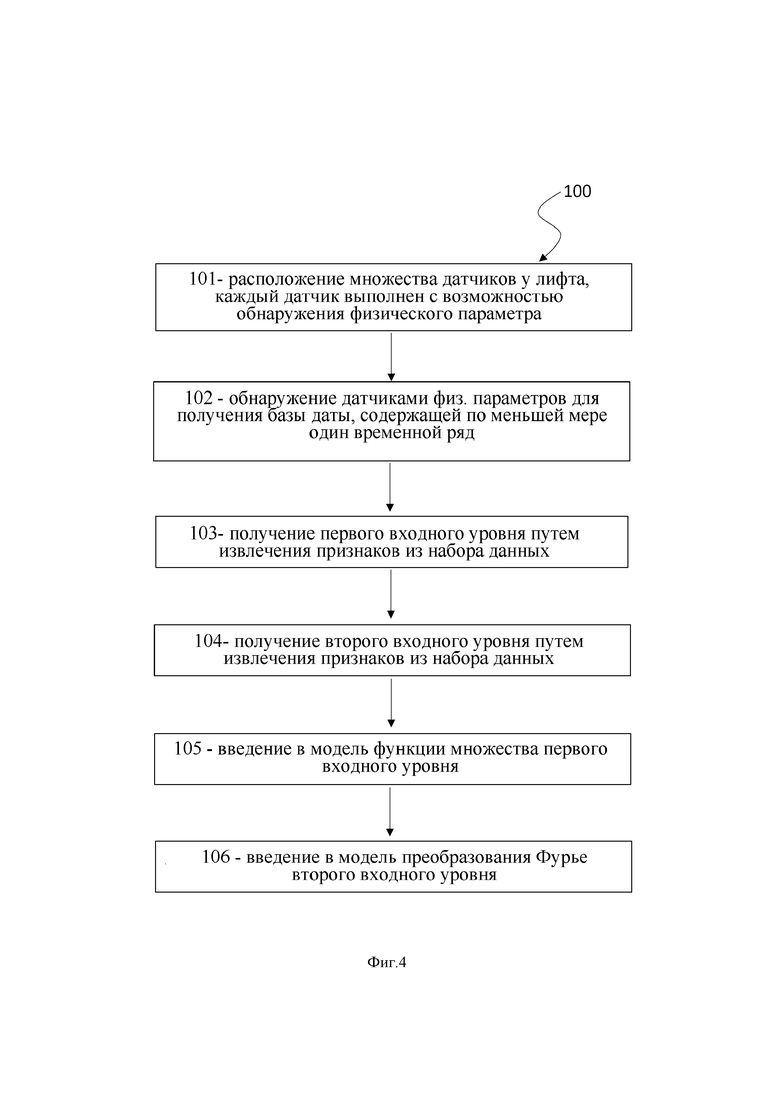
- фиг. 4 иллюстрирует блок-схему реализуемого компьютером способа обучения модели машинного обучения обнаружению ошибок установки в лифте, в частности двери лифта, в соответствии с настоящим изобретением;
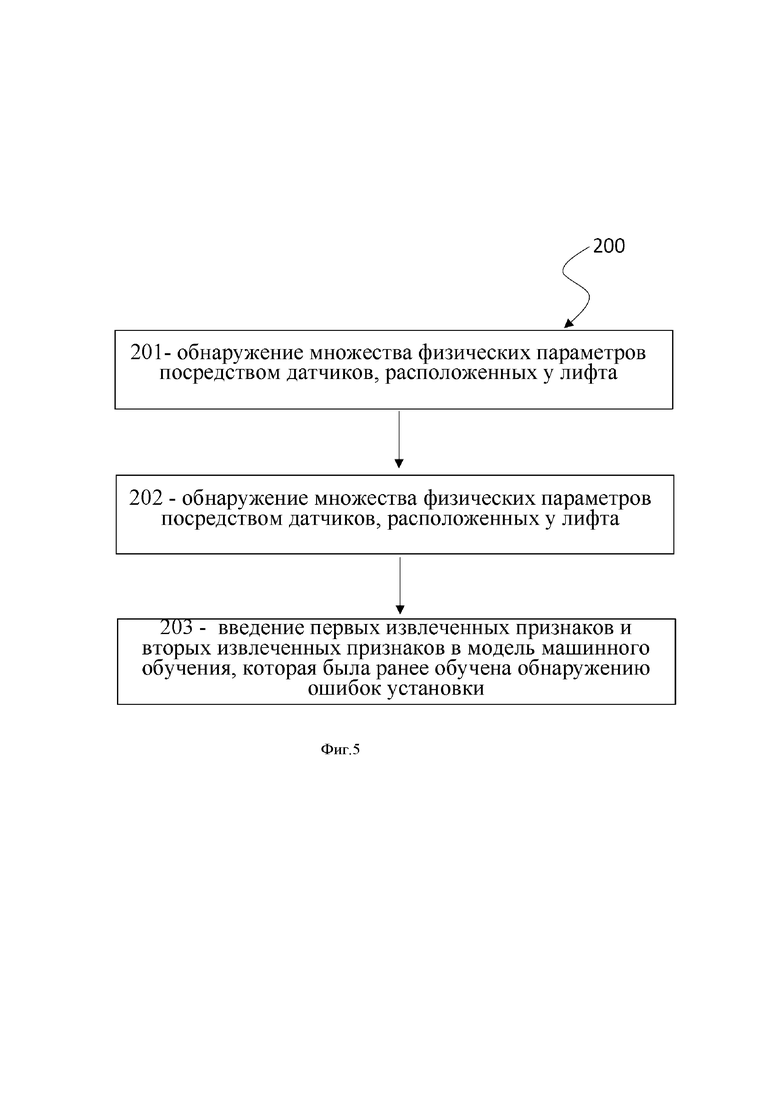
- фиг. 5 иллюстрирует блок-схему реализуемого компьютером способа классификации ошибок установки в лифте, в частности, двери лифта, в соответствии с настоящим изобретением.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На фигурах чертежей цифра 100 обозначает реализуемый компьютером способ обучения модели машинного обучения для обнаружения ошибок установки в лифте, в частности, двери лифта.
Способ применим к шахтной двери лифта или кабинной двери лифта.
В лифте могут быть обнаружены различные ошибки установки.
В соответствии с предпочтительным вариантом осуществления, способ 100 может идентифицировать две категории ошибок установки: двоичные отказы и отказы, измеренные в процентах.
Двоичный отказ указывается как как «присутствует» или «отсутствует».
В двоичных отказах присутствуют отказ замыкающего устройства, состояние шкива, касающегося ленты, и т.д.
Отказ, измеренный в процентах, оценивается в диапазоне.
При измерении отказов в процентах перечисляются: установка встречных роликов, горизонтальное смещение шахтной двери/кабинной двери лифта, вертикальное смещение шахтной двери/кабинной двери лифта, натяжение ленты, нулевое положение и т.д.
Как проиллюстрировано на фиг.4, способ 100 начинается с этапа расположения множества датчиков 2 у лифта (этап 101).
Способ 100 фактически основан на измерениях физических параметров, обнаруженных датчиками 2, расположенными у различных положений лифта 1 (этап 102), например, они функционально активны на двери 10 лифта 1.
Датчики 2 могут быть разного типа и количества. Например, могут использоваться датчик скорости двери, датчик положения двери, микрофон.
Предпочтительно измерения собирают для большого количества дверных циклов, например, 20.000.
Частота сбора данных может варьироваться в зависимости от типа датчика.
В частности, некоторые из датчиков обнаруживают статические значения, т.е. они не изменяющиеся в течение цикла. Например, статические значения относятся к характеристикам двери, таким как ширина, материал, тип двигателя и т.д.
Другие датчики обнаруживают значения, которые могут иметь циклическое изменение, то есть они периодически изменяются, например, температура, трение, вибрация и т.д.
Другие датчики обнаруживают образцы звука. Они могут относиться к звуку движущейся двери, щелканью реле и т.п.
Другие датчики обнаруживают значения, которые имеют более высокое изменение частоты в пределах дверного цикла, таким образом, инициируя временные ряды.
Все значения, обнаруженные датчиками, образуют базу данных, которая содержит, по меньшей мере, один временной ряд.
Например, набор данных, используемый для способа 10 обучения, содержит:
- список статических значений;
- список циклических значений;
- список образцов звука;
- матрицу временных рядов.
При этом способ 100 включает в себя:
- этап получения первого входного уровня для модели машинного обучения путем извлечения признаков из набора данных (этап 103);
- этап получения второго входного уровня для модели машинного обучения путем извлечения признаков из набора данных (этап 104).
Признаки или метки выбираются в зависимости от ошибок установки, которые модель должна научиться распознавать.
В частности, признаки, извлеченные для создания первого входного уровня, относятся к временным рядам набора данных.
Признаки, извлеченные для создания второго входного уровня, относятся к другим полям набора данных (статические значения, циклические значения, образцы звука).
Для образцов звука извлечение признаков осуществляется путем преобразования образов звука в визуальное представление признаков, такое как звуковые спектрограммы.
Первый подход к извлечению признаков из образцов звука - это использование автокодировщиков для изучения скрытого вектора признаков из изображения путем реконструкции самого изображения (неконтролируемое обучение).
Второй подход заключается в классификации изображений с собранными метками через сверточную нейронную сеть и фиксации одного из последних скрытых уровней в качестве дополнительного вектора признаков для классификации с обеими моделями. Для обеих моделей эти функции будут добавлены на этапе конкатенации.
Извлеченные признаки затем вводятся в модель машинного обучения по двум разным ветвям на одном уровне.
Фактически, модель машинного обучения состоит из двух моделей вдоль параллельных ветвей:
- первая модель, то есть модель Функции Множества;
- вторая модель, то есть модель Преобразования Фурье
В модель Функции Множества вводят первый входной уровень (этап 105).
В модель Преобразования Фурье вводят второй входной уровень (этап 106).
Что касается первой модели, то есть модели Функции Множества, первый входной уровень получают после предварительной обработки, включающей этап нормализации.
Классификация Функций Множества для Временных Рядов (Set Functions for Time Series, SeFT) является известным способом классификации и регрессии временных рядов.
Он работает с необработанными (нормализованными) временными рядами в качестве множества и способен обрабатывать дополнительные признаки, которые возникают один раз за временные ряды.
В принципе, информация о времени кодируется с помощью позиционного кодирования и вычисляется (возможно, множественными) взвешенными средствами измерений. Весовые коэффициенты обучаются с помощью механизма внимания.
После этих этапов получают вектор фиксированного размера, который описывает временные ряды в меньшем измерении.
Этот вектор конкатенируют с другими статическими, циклическими и, возможно, векторами звуковых признаков, чтобы сформировать входные данные для классификаторов/регрессоров, таких как нейронные сети.
Нужно также иметь в виду целевую функцию, которая предназначена для обработки двоичных целей, а также ограниченных целей регрессии. Для того, чтобы заполнить назначение, имеются двоичные значения в {0, 1} и нормализуются значения регрессии от [-100%, +100%] до [-1, 1].
Обучение SeFT осуществляется путем применения бинарной перекрестной энтропии.
Время обучения составляет около одного дня, для обучения используется около 20 000 дверных циклов.
Схематический вид Множества Функций, применяемых в предложенном способе 100, проиллюстрирован на фиг. 2.
Что касается второй модели, то есть модели Преобразования Фурье, второй входной уровень получают после предварительной обработки, включающей интерполяцию значений для получения равномерно отобранного временного ряда и преобразование сигнала в фазовую диаграмму, и нормализацию статических признаков для классификатора.
Преобразование Фурье преобразует сигнал временного ряда в его частотные части. Для этого генерируется и изменяется фазовая диаграмма скорость двери-положение двери, чтобы сформировать синусоидальную кривую для использования в преобразовании Фурье.
На датчик извлекается частота с максимальным коэффициентом и соответствующим коэффициентом в виде двухэлементного вектора. Все эти векторы и другие циклические признаки конкатенируют для формирования столбца признаков, который вводят в модель Преобразования Фурье.
Предпочтительно, используется так называемый «XGBoost», который представляет собой реализацию деревьев решений с повышенным градиентом, предназначенных для скорости и производительности. Раздельная реализация нескольких классификаторов XGBoost используется там, где потеря шарнира используется в качестве функции потери для двоичной классификации и квадрат потери для регрессии.
Нерегулярно отобранные временные ряды X интерполируют для получения p равноудаленных значений.
Обучение с Преобразованием Фурье осуществляется путем применения потери шарнира для целей классификации.
Время обучения составляет около 3 минут, для обучения используется около 20 000 дверных циклов.
Схематический вид модели БПФ, применяемой в предложенном способе 100, проиллюстрирован на фиг. 3.
На фиг. 5 цифра 200 обозначает способ обнаружения ошибок установки в лифте, в частности, двери лифта. Способ 200 включает следующие этапы, показанные на блок-схеме с фиг. 5:
- обнаружение множества физических параметров посредством датчиков, расположенных у лифта (этап 201);
- выполнение извлечения первого признака и извлечения второго признака из обнаруженных физических параметров (этап 202);
- введение первых извлеченных признаков и вторых извлеченных признаков в модель машинного обучения, которая была ранее обучена обнаружению ошибок установки (этап 203).
На фиг. 1 цифра 300 обозначает систему обнаружения ошибок установки в лифте 1, в частности, двери лифта 10, содержащую:
- множество датчиков 2, расположенных у лифта и выполненных с возможностью обнаружения физических параметров;
- первый блок 3 извлечения признаков и второй блок 4 извлечения признаков, выполненные с возможностью извлечения признаков из обнаруженных физических параметров;
- модель машинного обучения ML, состоящая из комбинации модели Множества Функций, SF, и модели Преобразования Фурье, FT, выполненная с возможностью обнаружения ошибок установки в ответ на получение извлеченных признаков, поступающих от первого блока извлечения признаков 3 и от второго блока извлечения признаков 4, причем модель машинного обучения ML была обучена в соответствии со способом, описанным выше.
В соответствии с одним аспектом изобретения, обнаруженные физические параметры могут быть предварительно обработаны перед введением в первый блок 3 извлечения признаков и во второй блок 4 извлечения признаков.
В соответствии с одним аспектом изобретения, выходные данные первого блока 3 извлечения и второго блока 4 извлечения могут быть обработаны перед подачей в модель машинного обучения ML.
Характеристики и преимущества реализуемого компьютером способа обучения модели машинного обучения обнаружению ошибок установки в лифте, в частности, двери лифта, а также реализуемого компьютером способа классификации ошибок установки и его системы, согласно настоящему изобретению, ясны, как и преимущества.
В частности, предлагаемый способ позволяет повысить качество процесса установки, в частности в отношении дверей лифта, благодаря огромному объему данных, получаемых от датчиков, установленных в непосредственной близости от двери, и особой выбранной модели машинного обучения.
Это сокращает время и затраты на установку, и позволяет планировать операции по техническому обслуживанию и мониторингу, а также сокращает время на получение сертификата качества.
Предложенное изобретение также применимо к другим компонентам лифта.
Изобретение относится к лифтовому оборудованию. Реализуемый компьютером способ обучения модели машинного обучения обнаружению ошибок установки в лифте, в частности, двери лифта, причем модель машинного обучения представляет собой комбинацию модели Функции Множества и модели Преобразования Фурье, содержит этап расположения множества датчиков физических параметров у лифта; этап обнаружения значений физических параметров посредством указанных датчиков для получения набора данных, содержащего по меньшей мере один временной ряд; этап получения первого входного уровня путем извлечения признаков из набора данных; этап получения второго входного уровня путем извлечения признаков из набора данных. Первый входной уровень вводят в модель Функции Множества, а второй входной уровень вводят в модель Преобразования Фурье. Улучшается обнаружение неисправных установок дверей лифта. 4 н. и 6 з.п. ф-лы, 5 ил.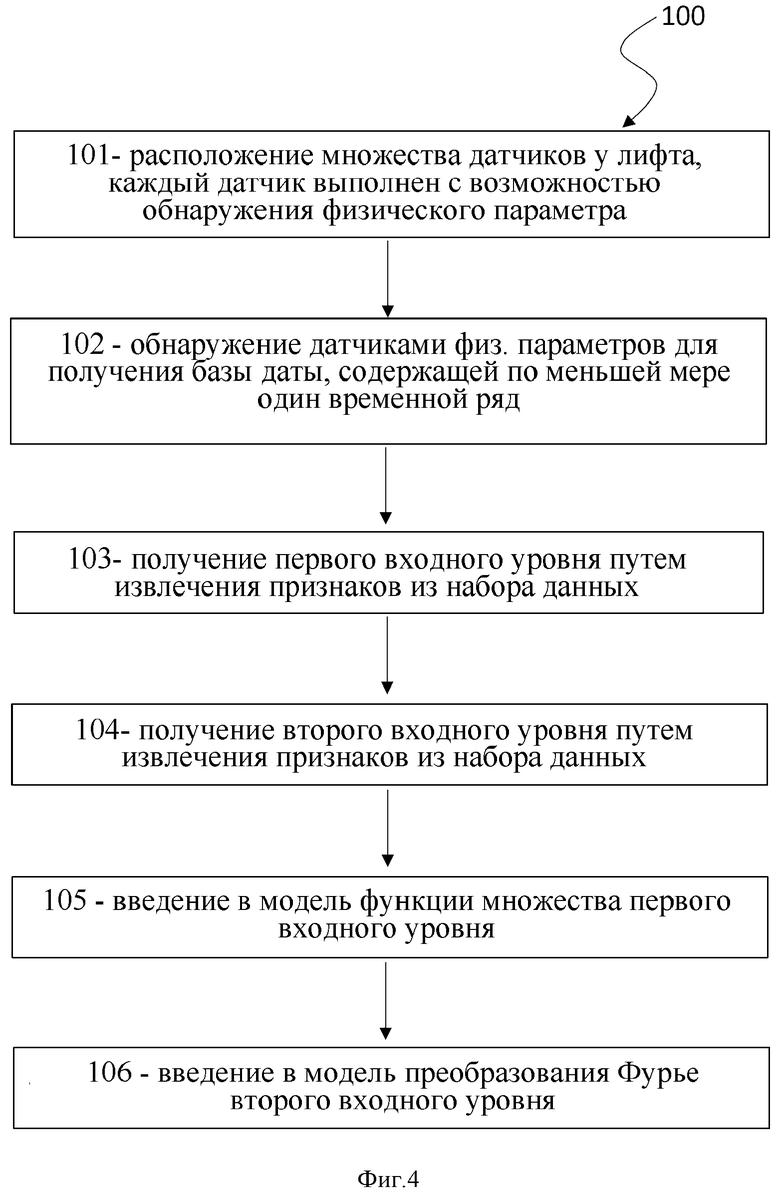
1. Реализуемый компьютером способ (100) обучения модели машинного обучения обнаружению ошибок установки в лифте, в частности, двери лифта, причем модель машинного обучения представляет собой комбинацию модели Функции Множества и модели Преобразования Фурье, причем способ (100) содержит этапы:
- расположение множества датчиков у лифта (101), причем каждый датчик выполнен с возможностью обнаружения физического параметра;
- обнаружение значений физических параметров посредством указанных датчиков для получения набора данных, содержащего по меньшей мере один временной ряд (102);
- получение первого входного уровня путем извлечения признаков из набора данных (103);
- получение второго входного уровня путем извлечения признаков из набора данных (104);
- введение в модель Функции Множества первого входного уровня (105);
- введение в модель Преобразования Фурье второго входного уровня (106).
2. Способ (100) по п.1, в котором набор данных содержит матрицу временных рядов.
3. Способ (100) по п.1 или 2, в котором набор данных дополнительно содержит одно или более статических значений или циклических значений.
4. Способ (100) по любому из предшествующих пунктов, в котором набор данных дополнительно содержит образцы звука.
5. Способ (100) по п.4, в котором извлеченные признаки образцов звука содержат звуковые спектрограммы.
6. Способ (100) по любому из предшествующих пунктов, в котором этап обнаружения значений физических параметров посредством указанных датчиков (102) происходит с различной периодичностью в зависимости от типа датчика и соответствующего физического параметра.
7. Реализуемый компьютером способ (200) обнаружения ошибок установки в лифте, в частности, двери лифта, причем указанный способ (200) содержит этапы:
- обнаружение множества физических параметров посредством датчиков, расположенных у лифта (201);
- выполнение извлечения первого признака и извлечения второго признака из обнаруженных физических параметров (202);
- введение первых извлеченных признаков и вторых извлеченных признаков в модель машинного обучения, которая была обучена обнаружению ошибок (203) установки в соответствии с любым из пп.1-6.
8. Система (300) для обнаружения ошибок установки в лифте (1), в частности, двери лифта, содержащая:
- множество датчиков (2), расположенных у лифта (1) и выполненных с возможностью обнаружения физических параметров;
- первый блок (3) извлечения признаков и второй блок (4) извлечения признаков, выполненные с возможностью извлечения признаков из обнаруженных физических параметров;
- модель машинного обучения (ML), состоящую из комбинации модели Функции Множества (SF) и модели Преобразования Фурье (FT), выполненную с возможностью обнаружения ошибок установки в ответ на получение извлеченных признаков, поступающих от первого блока (3) извлечения признаков и от второго блока (4) извлечения признаков, причем указанная модель машинного обучения (ML) была обучена обнаружению ошибок установки в соответствии с любым из пп.1-6.
9. Система (300) по п.8, в которой датчики (2) выбраны из следующего: датчик положения, датчик скорости, микрофон.
10. Память электронного устройства, содержащая загруженный программный продукт, причем указанный программный продукт содержит инструкции, которые при исполнении электронным устройством определяют выполнение этапов способа по п.7.
| CN 111179964 A, 19.05.2020 | |||
| EP 3459891 A2, 27.03.2019 | |||
| WO 2018096582 A1, 31.05.2018 | |||
| Способ получения ацетамидооксифениларсиновой кислоты | 1930 |
|
SU28908A1 |
| СПОСОБ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ЛИФТОВОЙ УСТАНОВКИ И ЛИФТОВАЯ УСТАНОВКА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2010 |
|
RU2534830C2 |
| US 2020062542 A1, 27.02.2020 | |||
| US 10196236 B2, 05.02.2019. | |||

