Область техники, к которой относится изобретение
Изобретение относится к вспомогательным электронным системам транспортных средств, а именно к системам для определения приближения к транспортному средству пользовательского устройства и установки в транспортном средстве соответствующих индивидуальных настроек.
Уровень техники
Оператор транспортного средства, например, водитель пассажирского автомобиля, может предпочесть и/или счесть целесообразным использование определенных настроек транспортного средства. В качестве нескольких примеров для отдельно взятого транспортного средства можно привести различные параметры для чувствительности работы дросселя, яркости фар, настроек радиостанций, положений зеркал, положений сидений и т.д., которые могут оказаться предпочтительными и/или подходящими для различных водителей. Также водитель данного транспортного средства может использовать другие транспортные средства, например, транспортные средства, предоставляемые на правах аренды, лизинга или группового пользования и т.д. Например, существуют программы предоставления транспортного средства на правах группового пользования, по которым водитель может выбирать абсолютно разные транспортные средства для разных целей, например, компактный седан для городской езды или пикап для перевозки вещей. Водитель транспортного средства может предпочесть и/или счесть целесообразными различные настройки для каждого из них. Однако различные транспортные средства имеют различные конфигурации настроек, например, чувствительность работы дросселя, положения сидений и т.д. На сегодняшний день существует необходимость создания механизмов, позволяющих использовать настройки, выбранные водителем для первого транспортного средства, во втором транспортном средстве с другой конфигурацией.
Раскрытие изобретения
Предложен компьютерный сервер, который включает в себя процессор и запоминающее устройство, выполненный с возможностью:
принимать идентификатор для оператора оборудования и идентификатор для оборудования;
принимать набор параметров, связанных с работой оборудования, включающий в себя данные профиля оператора и/или данные оборудования и/или данные, собранные при работе оборудования;
определять универсальную модель для по крайней мере одного компонента оборудования;
генерировать новую модель для определения по крайней мере одной настройки для оператора с помощью по крайней мере одного компонента оборудования;
передавать новую модель компьютеру оборудования.
Компьютерный сервер также может быть выполнен с возможностью определять предыдущую модель для по крайней мере одного компонента и использовать ее при генерации новой модели.
Компьютерный сервер также может быть выполнен с возможностью использовать нейросети для генерации новой модели.
Компьютер оборудования также может быть выполнен с возможностью использовать новую модель для определения по крайней мере одной настройки.
Компьютерный сервер также может быть выполнен с возможностью принимать второй набор параметров, связанных с эксплуатацией оборудования оператором; использовать по крайней мере некоторые параметры из второго набора для генерирования новой второй модели для определения по крайней мере одной настройки для оператора с помощью по крайней мере одного компонента оборудования.
Компьютерный сервер также может быть выполнен с возможностью передачи новой второй модели компьютеру оборудования.
Компьютерный сервер также может быть выполнен с возможностью принимать второй набор параметров, связанных с эксплуатацией оборудования оператором; использовать по меньшей мере некоторые параметры из второго набора для создания новой второй модели для определения по крайней мере одной настройки для оператора с помощью по крайней мере одного компонента второго оборудования; и передавать новую вторую модель второму компьютеру оборудования.
Оборудованием может являться транспортное средство.
В другом аспекте изобретения предложен способ установки пользовательских настроек, в котором принимают идентификатор для оператора оборудования и идентификатор для оборудования; принимают набор параметров, связанных с работой оборудования, включающий в себя данные профиля оператора, и/или данные оборудования, и/или данные, собранные при работе оборудования; определяют универсальную модель для по крайней мере одного компонента оборудования; генерируют новую модель для определения по крайней мере одной настройки для оператора с помощью по крайней мере одного компонента оборудования; и передают новую модель компьютеру оборудования.
Дополнительно можно определять предыдущую модель для по крайней мере одного компонента и использовать ее при генерировании новой модели.
Для генерирования новой модели можно использовать нейросеть.
В компьютере оборудования можно использовать новую модель для определения по крайней мере одной полученной настройки.
Дополнительно можно принимать второй набор параметров, связанных с эксплуатацией оборудования оператором, использовать по крайней мере некоторые параметры из второго набора для генерирования новой второй модели для определения по крайней мере одной настройки для оператора с помощью по крайней мере одного компонента оборудования.
Также можно передавать новую вторую модель компьютеру оборудования.
Дополнительно можно принимать второй набор параметров, связанных с эксплуатацией оборудования оператором, использовать по крайней мере некоторые параметры из второго набора для генерирования новой второй модели для определения по крайней мере одной настройки для оператора с помощью по крайней мере одного компонента второго оборудования, и передавать новую вторую модель второму компьютеру второго оборудования.
В другом примере может быть предложено бортовое вычислительное устройство транспортного средства, включающее в себя процессор и запоминающее устройство. При этом вычислительное устройство выполнено с возможностью определять приближение к транспортному средству пользовательского устройства, передавать идентификатор пользовательского устройства и идентификатор транспортного средства удаленному серверу, принимать от удаленного сервера модель для создания данных настройки в транспортном средстве, которая генерирована, по крайней мере частично, на основании идентификатора пользовательского устройства и идентификатора транспортного средства, генерировать по крайней мере одну настройку для по крайней мере одного компонента транспортного средства в соответствии с указанной моделью, и применять эту по крайней мере одну настройку к по крайней мере одному компоненту транспортного средства.
Устройство также может быть выполнено с возможностью сбора данных, относящихся к эксплуатации транспортного средства и передачи собранных данных удаленному серверу.
Устройство также может быть выполнено с возможностью принимать вторую модель для генерирования настроек в транспортном средстве, генерировать по крайней мере одну вторую настройку для по крайней мере одного компонента транспортного средства в соответствии со второй моделью, и применять по крайней мере одну указанную вторую настройку к по крайней мере одному компоненту транспортного средства, которым может быть сиденье, зеркало, дроссель, микрофон, динамик, климат-контроля, окно, люк и/или система усилителя руля.
Краткое описание чертежей
На Фиг. 1 изображена схема системы предоставления настроек транспортного средства.
На Фиг. 2 приведено детальное изображение операций, выполняемых устройством прогнозирования.
На Фиг. 3a и 3b проиллюстрирован пример моделей 210 работы дросселя.
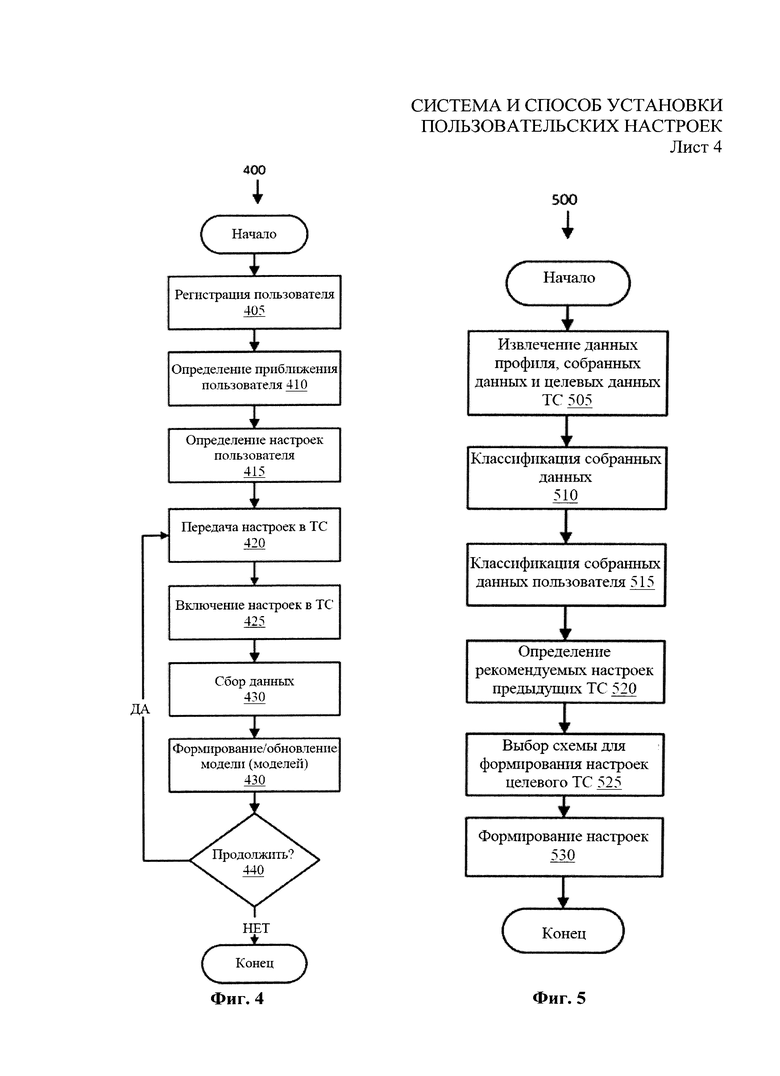
На Фиг. 4 изображена схема процесса указания настроек транспортного средства.
На Фиг. 5 изображена подробная схема процесса генерирования настроек транспортного средства.
Осуществление изобретения
На Фиг. 1 представлена схема примера системы 100 предоставления настроек транспортного средства. Однако следует понимать, что раскрытые системы и способы могут быть применены к оборудованию, не относящемуся к автомобилям, например, к лодкам, мотоциклам, самолетам и т.д.
В любом случае, что касается представленных примеров, в транспортном средстве используется несколько бортовых компьютеров 105, каждый из которых имеет один или несколько процессоров, а также по крайней мере одно запоминающее устройство, на котором хранятся собранные данные 110, касающиеся эксплуатации водителем транспортного средства, а также данные 115 о предпочтительных и/или целесообразных для водителя транспортного средства настройках. Транспортное средство имеет одно или несколько устройств 120 сбора данных, например, датчики, устройства ввода и т.д., которые являются частью бортового компьютера 105, установленного в транспортном средстве, или соединены с ним с возможностью обмена данными. Обычно связь бортового компьютера с сервером 130 осуществляется по сети 125. Сервер 130 включает в себя процессор и запоминающее устройство, при этом на запоминающем устройстве обычно сохранены программные инструкции, включающие в себя модуль 135 классификации и модуль 140 прогнозирования, а также собранные данные 110, данные 145 о транспортном средстве и данные 150 профиля, которые, в свою очередь, могут быть использованы для генерирования данных 115 настроек, передаваемых бортовому компьютеру 105. Система 100 также может включать в себя одно или несколько пользовательских устройств 155, которые можно использовать для связи с бортовым компьютером 105 различными описанными ниже способами.
Бортовой компьютер 105 обычно имеет процессор и запоминающее устройство, которое включает в себя одну или несколько форм машиночитаемых носителей и на котором хранятся инструкции, выполняемые процессором для осуществления различных операций, включая описанные ниже действия. На запоминающем устройстве компьютера 105 также обычно хранятся собранные данные 110 и данные 115 настроек. Компьютер 105 обычно может обмениваться данными через шину локальной сети контроллеров (CAN) или аналогичную систему. По CAN-шине и/или с помощью другой системы, например, Bluetooth или других беспроводных технологий, компьютер 105 может передавать сообщения различным устройствам транспортного средства и/или принимать сообщения от различных устройств, например, от контроллеров, исполнительных механизмов, датчиков и т.д., к которым также можно отнести устройства 120 сбора данных.
Собранные данные 110 могут включать в себя различные данные, собранные в транспортном средстве. Собранные данные 110 могут включать в себя любые данные, которые могут быть получены устройством 120 сбора данных, и которые могут относиться к настройкам 115. Например, собранные данные 100 могут включать в себя скорость, ускорение, торможение, давление шин, положения сидений, положения зеркал, использование стеклоочистителей транспортного средства и т.д.
В частности, собранные данные ПО могут включать в себя так называемые контекстные параметры, например, данные, относящиеся к текущему рабочему состоянию транспортного средства, окружающей среде и т.д. В качестве примера собранных данных 110 можно привести коэффициент трения шин (полученный модулями противобуксовочной и/или антиблокировочной тормозной систем (TCS/ALB)), скорость/направление/положение транспортного средства (например, полученные GPS-модулем, входящим в компьютер 150 или соединенный с ним), наружное освещение (например, дневной/вечерний/ночной/утренний свет, расчетные с помощью бортового пирометра), топография местности (с помощью сервера глобальной информационной системы (GIS)), облачность (с помощью сервера погоды), температура окружающей среды (устройство 120 сбора данных от датчика температуры за бортом), наличие осадков (устройство 120 сбора данных от стеклоочистителя и/или сервера погоды) и т.д.
Следует понимать, что большую часть указанных данных можно получить напрямую или косвенно из сигналов, передаваемых по бортовой шине. Например, в отношении определения коэффициента трения наиболее вероятное значение может быть рассчитано на основании условий окружающей среды, таких как температура, атмосферное давление, давление шин и т.д. Действительный коэффициент трения может быть измерен при сильном ускорении или торможении транспортного средства с помощью алгоритма управления, который использует измеренные значения скорости колеса, крутящего момента колеса и ускорения для определения отношения максимального момента к массе транспортного средства, которое и является коэффициентом трения.
Настройки 115 могут включать в себя практически любую информацию, касающуюся параметров транспортного средства. Перечень примеров настроек 115 представлен в приложении А. Кроме того, примеры настроек 115 отражают примеры собранных данных 110, которые можно использовать в качестве настроек 115. Например, собранные данные 110 могут включать в себя вес оператора, определяемый датчиком веса, при этом данные 115 настроек могут указывать на необходимость включения или отключения подушки безопасности. Аналогичным образом собранные данные 110 могут представлять собой предпочтительные значения интервалов включения стеклоочистителей в различных погодных условиях, при этом данные 115 настроек могут включать в себя отображение настроек стеклоочистителей для различных соответствующих условий.
Некоторые собранные данные 110 не могут быть непосредственно преобразованы в настройки 115. Например, собранные данные 110 могут включать в себя стиль вождения с точки зрения ускорения и торможения и/или относиться к предпочтениям водителя в отношении чувствительности работы дросселя. Однако чувствительность работы дросселя для первого транспортного средства, например, для спортивного автомобиля, не может быть преобразована непосредственно в чувствительность работы дросселя для второго транспортного средства, такого как тяжелый внедорожник. Аналогичным образом настройки 115 для распознавания речи в первом транспортном средстве, например, параметры 115 чувствительности микрофона, режим подавления шума и т.д., могут отличаться от настроек 115 второго транспортного средства. Как описано более подробно ниже, сопоставление и/или преобразование характеристик могут быть выполнены таким образом, чтобы собранные данные ПО и/или данные 115 настроек от первого транспортного средства, и/или общие настройки 115 (например, реализуемые в универсальной модели 205, рассмотренной далее со ссылкой на Фиг. 2) могли быть преобразованы в настройки 115 для одного или нескольких транспортных средств.
Устройства 120 сбора данных могут включать в себя различные устройства, в том числе различные датчики, установленные на транспортном средстве. Например, устройство 120 сбора данных может включать в себя вышеупомянутый датчик массы, а также датчики, которые регистрируют условия освещенности, датчики звука и т.д. Также устройство 120 сбора данных может принимать данные через такие системы связи, как CAN-шина транспортного средства (например, данные, касающиеся скорости, ускорения и торможения транспортного средства, состояния коробки передач, состояния различных компонентов, таких как двери, окна, системы климат-контроля, сиденья, фары, давление в шинах и т.д.). Более полный перечень примеров данных, которые могут быть получены устройством 120 сбора данных, приведен в перечне настроек 115 в приложении А.
Сеть 125 представляет собой одну или несколько систем, с помощью которых бортовой компьютер 105 может связаться с удаленным сервером 130. Соответственно, сеть 125 может использовать одну или несколько проводных или беспроводных систем связи, включая любое сочетание проводных (например, кабельных или волоконно-оптических) и/или беспроводных (например, сотовых, беспроводных, спутниковых, сверхвысокочастотных и радиочастотных) протоколов связи, а также любую требуемую топологию (или топологии, при использовании нескольких систем связи). В качестве сетей связи включает в себя беспроводные сети связи, локальные сети (LAN) и/или глобальные сети (WAN), к которым относится Интернет, предоставляющие услуги передачи данных. Как было сказано ранее, сеть 125 может включать в себя CAN-шину на одном или нескольких транспортных средствах.
Сервер 130 может представлять собой один или несколько компьютерных серверов и/или баз данных, включающих в себя по крайней мере один процессор и по крайней мере одно запоминающее устройство. При этом на запоминающем устройстве хранятся выполняемые процессором инструкции, включая инструкции для реализации различных вышеописанных действий и процессов. Такие инструкции включают в себя инструкции в различных модулях, например, в модуле 135 прогнозирования и модуле 140 классификации. Следует понимать, что сервер 130 может представлять собой аппаратные и/или программные средства, находящиеся в более чем одном физическом местоположении. Например, сервер 130 может представлять собой «веб-сервис» в сети доставки контента на сервисной шине, при этом можно обеспечить распределение функций обработки и хранения сервера 130.
Модуль 135 прогнозирования включает в себя инструкции для реализации методов предиктивного моделирования (прогнозирования) для получения настроек 115 для водителя транспортного средства, например, на основании собранных данных ПО и/или данных 115 настроек, связанных с другими транспортными средствами. Модуль 135 прогнозирования также может включать в себя модули 140 классификации, использование которых может включать в себя такие модели, как нейросети, которые принимают в качестве входных данных данные 145 транспортного средства, данные 150 профиля, собранные данные 110 и ретроспективные данные 115 настроек, для использования модулем 135 прогнозирования в отношении генерирования новых настроек 115 водителя для конкретного транспортного средства. Более подробно работа сервера 130, использующего модуль 135 прогнозирования и модуль 140 классификации, рассмотрена далее со ссылкой на Фиг. 2.
Данные 145 транспортного средства обычно включают в себя данные, относящиеся к параметрам транспортного средства. Данные параметры могут включать в себя различные данные, касающиеся размеров транспортного средства, возможных конфигураций и т.д. Например, данные 145, связанные с маркой и моделью конкретного транспортного средства, могут указывать на высоту крыши, длину, ширину и вес транспортного средства, а также информацию о коробке передач, двигателе и т.д. Также данные 145 транспортного средства могут содержать информацию о климатических условиях в салоне транспортного средства, например, акустические условия, такие как влияние дорожного шума на транспортное средство.
К примерам данных 145, которые можно использовать в качестве параметров в модуле 115 классификации, относятся, помимо прочего, соотношение мощность/вес транспортного средства, тип кузова, цвет, комплектация дополнительного оборудования, возможные положения педалей тормоза, сцепления и/или газа, возможные положения сидений, возможные положения микрофона и/или динамика (специалистам в данной области техники ясно, что все вышеперечисленное можно определить по идентификационному номеру транспортного средства (VIN) путем отправки запроса на сервер данных транспортного средства), акустические характеристики (обычно определяемые с помощью микрофона и параметров подавления эхо).
Данные 150 профиля обычно включают в себя данные, относящиеся к пользователю системы, например, водителю транспортного средства. Как и в случае с собранными данными 110 и данными 145 транспортного средства, данные 150 профиля можно использовать в качестве входных данных для одного или нескольких модулей 115 классификации. Например, данные 150 профиля могут содержать информацию о предпочтительных значениях различных параметров транспортного средства (например, климатические параметры, чувствительность работы дросселя, режим работы стеклоочистителей, условия освещения и т.д.). Таким образом, данные 150 профиля могут быть переданы серверу 130 или приняты от сервера 130 пользовательским устройством 155 посредством графического пользовательского интерфейса (GUI). Также данные 150 профиля могут быть получены из собранных данных 110. Например, собранные данные 110 могут содержать информацию, касающуюся стиля ускорения и торможения. Данная информация может быть включена в данные 150 профиля, относящиеся к настройкам 115 чувствительности работы дросселя, соответствующим водителю транспортного средства.
К другим примерам данных 150 профиля, которые можно использовать в качестве параметров для модуля 140 классификации, относятся, помимо прочего, физиологические размеры и соответствующие характеристики водителя (рост, вес (определяется по введенным пользователем данным или с помощью устройства 120 сбора данных от датчика веса), длина рук, длина ног, предпочтительные положения сидений и рулевого колеса для данного транспортного средства, изображения с камеры, пользовательские данные, касающиеся его предпочтений), стаж вождения (определяется по введенным пользователем данным), тип транспортного средства (например, модель), на котором водитель учился ездить (по введенным пользователем данным), типичный маршрут и/или характеристики голоса (тембр, гнусавость, скорость речи, диалект, возраст, определяемые, например, системой исследования голоса) и т.д.
Пользовательское устройство 155 может представлять собой любое вычислительное устройство, в состав которого входит процессор и запоминающее устройство, а также средства связи. Например, пользовательским устройством 155 может быть портативный компьютер, карманный компьютер, смартфон и т.д., которые имеют средства беспроводной связи по стандарту IEEE 802.11, Bluetooth и/или сотовой связи. Также пользовательское устройство 155 может использовать указанные средства связи для обмена данными по сети 125 или напрямую с бортовым компьютером 105, например, с помощью Bluetooth.
ГЕНЕРИРОВАНИЕ ПАРАМЕТРОВ
На Фиг. 2 представлена другая подробная информация по работе модуля 135 прогнозирования, который можно использовать для генерирования настроек 115 для водителя в транспортных средствах различных типов. Таким образом, модуль 135 прогнозирования использует модель 205 универсального представления настроек 115 транспортного средства для водителя. Таким образом, модель 205 представляет собой различные настройки 115 транспортного средства для водителя, не сопоставленные с типом транспортного средства. Например, как показано на Фиг. 2, модули 140 классификации можно использовать для формирования моделей 210 настроек транспортного средства, которые, в свою очередь, можно использовать для формирования данных 115 настроек водителя из модели 205 универсального представления для водителя в транспортном средстве определенного типа.
Обычно универсальная модель 205 включает в себя общий набор настроек 115, относящихся к одной или нескольким функциям, элементам, компонентам и т.д. транспортного средства для водителя. Например, модель 205 может указать общие настройки для положений сидений, зеркал и т.д. Также пример рассмотренных выше данных 150 профиля чувствительности работы дросселя показывает, как модель 205 универсального представления может быть основой для преобразования настроек 115 водителя для одного или нескольких первых транспортных средств в настройки 115 водителя для второго транспортного средства. В таблице 1 представлен пример части модели 205 универсального представления для настроек 115 работы дросселя:
Для дальнейшего объяснения данного примера стоит отметить, что современные транспортные средства обычно включают в себя так называемый дроссель с электронным управлением, в котором транспортное средство имеет устройство 120 сбора данных, например, датчик, который регистрирует положение дросселя (например, педали газа). Как показано в таблице 1, положение газа может быть сопоставлено с требуемым крутящим моментом, например, путем использования заданной характеристики, которая обычно формируется как часть рабочих характеристик транспортного средства. Однако схема работы дросселя не должна оставаться одинаковой в течение всего срока эксплуатации транспортного средства, наоборот, она должна иметь возможность перепрограммирования, например, для соответствия предпочтениям водителя, дорожной обстановке и т.д. Например, на скользкой дороге предпочтительной может оказаться менее агрессивная схема работы дросселя, например, коэффициент трения может быть рассчитан бортовым компьютером 105 и использован для автоматического изменения схемы работы дросселя в соответствии с предпочтениями водителя и т.д.
«Агрессивная» схема работы дросселя обычно включает в себя сильное увеличение крутящего момента при перемещении дросселя в первой половине хода и меньшее увеличение крутящего момента при дальнейшем перемещении дросселя во второй половине хода. Такая схема работы дросселя создает ощущение быстрого ускорения, т.е. мощного разгона с места, что может быть предпочтительно для некоторых водителей транспортного средства. Другие водители могут предпочесть более равномерный разгон и, возможно, большую экономию топлива, меньший износ транспортного средства и т.д., а также создание высокого крутящего момента только при движении или ускорении на шоссе.
Соответственно, для сопоставления положений дросселя и требуемого крутящего момента можно использовать модель 210 аналитической кривой или другие механизмы, например, сплайновую кривую или интерполирование точек на графике. Аналитическая кривая требует меньше памяти для хранения схемы сопоставления, чем сплайны или интерполяция, но требует большей вычислительной мощности. Также в некоторых случаях аналитическая функция может быть полезной для модели 210, поскольку она имеет бесконечные непрерывные производные.
На Фиг. 3A и 3B соответственно представлены математические модели 210-3a и 210-3b для определения крутящего момента τ, который будет приложен при различных положениях педали газа, обозначенных как ρ. На Фиг. 3A значения α и β - подстроечные параметры, которые могут быть изменены для улучшения настройки 115, созданной с помощью модели 210, с помощью итераций модулей 140 классификации.
Модуль 140 классификации может учитывать ряд факторов для выбора модели 210, например, преобразование настроек 115 дросселя может включать в себя данные 150 профиля, например, параметры для предпочтений водителя, а также контекстные параметры, такие как условия движения (например, расчетный коэффициент трения), как было сказано выше. Также контекстные параметры, относящиеся к модели 210 преобразования, могут включать в себя данные 145 транспортного средства, относящиеся к его особенностям (например, давление не педаль и горизонтальное расстояние от педали до рулевого колеса). Добавление этих особенностей в качестве входных данных модуля 140 классификации позволяет прогнозировать предпочитаемую водителем схему работы дросселя для конкретного транспортного средства, которое водитель может использовать (например, транспортное средство из парка автомобилей или транспортное средство, используемое на правах группового пользования). Таким образом, модуль 140 классификации может использовать параметры в данных 150 профиля, данных 145 транспортного средства и т.д., например, габариты водителя и/или транспортного средства, для предсказания положения водителя в различных транспортных средствах с последующим изменением схемы работы дросселя.
Соответственно, параметры для модуля 140 классификации, например, для выбора модели 210 с целью преобразования первой схемы работы дросселя во вторую схему работы дросселя, могут быть разработаны с помощью методов машинного обучения. Такой процесс обучения может происходить в по крайней мере одном из двух режимов: первый - пошаговое увеличение; второй - трансформационное изменение.
Вариационные изменения обычно одновременно влияют на небольшое количество параметров модели модуля 115 классификации и обычно изначально в количественном выражении составляют порядка нескольких процентов и обычно становятся меньше по мере уточнения модели. Возможно два типа вариационных изменений: первая - инициируемые системой, вторая - инициируемые пользователем. Обучение, инициируемое системой, собирает данные 150 профиля путем сбора пользовательских (например, водительских) вводимых данных, данный процесс аналогичен тому, как окулист подбирает очки. Сначала может быть произведено изменение системного параметра, например, чувствительности работы дросселя, а затем водителю транспортного средства может быть выдан запрос, например, с помощью приложения на мобильном телефоне или человеко-машинного интерфейса (например, сенсорного экрана и т.д.) для определения того, нравится ли водителю изменение или нет. Если изменение удовлетворяет водителя, оно вносится в модель модуля 115 классификации и может быть использовано для управления будущими вариационными изменениями, если желательно избежать повторения тех же вариаций в будущем. В случае инициируемого пользователем обучения, наоборот, водитель может запросить изменение параметра, например, «сделать работу дросселя более чувствительной на низкой скорости», после чего компьютер 105 изменит схему работы дросселя. Для получения входных данных, указывающих на то, какие настройки больше нравятся водителю, новые или старые, также можно использовать пользовательский интерфейс, например, аналогичный интерфейсу, описанному выше. Если предпочтение отдается новым настройкам, то будут использоваться они, а старые настройки могут быть сохранены для использования при определении направления будущих пошаговых изменений.
Чтобы увидеть, какие настройки больше нравятся водителю, старые или новые, может быть выполнено пробное обучение путем выполнения трансформационных изменений в параметрах модели. Значительные изменения основываются на данных 150 профиля для других водителей транспортного средства, а иногда на заданных настройках. Целью пробных изменений является обнаружение изменений точки зрения водителя и схем работы дросселя, которые могут не понравиться водителю.
На Фиг. 3A и 3B изображен пример моделей 210 составления схем работы дросселя. Как показано на Фиг. 3A и 3B, для определения схемы работы дросселя первое и второе транспортные средства могут использовать первую и вторую аналитические функции (например, модели 210-3a и 210-3b). Для устранения этой разницы математических моделей 210 можно использовать трансформацию модели для преобразования первой и второй кривых в универсальную математическую модель (в интерполяционную таблицу), которую можно хранить в памяти сервера 130, и обратно.
Другим примером использования модулей 140 классификации для создания моделей 210 может служить распознавание речи, например, настройки 115 для поддержки речевой диалоговой системы в транспортном средстве. Индивидуальная командная система управления (subjective command control, SCC) на основе речевого диалога обычно включает в себя данные 150 профиля, которые со временем накапливаются и хранятся в памяти для распознавания и синтеза речи. Диалог SCC может быть представлен как обмен информацией между языком представления SCC и человеческим языком по каналу с помехами, например, в соответствии с треугольной моделью Вокуа (Vauquois Triangle). Когда пользователь говорит с системой SCC, язык представления переводится в мозгу пользователя в семантический язык, затем в синтаксическую структуру, затем в фонетический язык, затем в движение мускулатуры, в результате чего пользователь произносит фразу, при этом звук изменяется с учетом акустических условий в транспортном средстве до того, как устройство 120 сбора данных успевает зарегистрировать его с помощью микрофона, который также изменяет звук перед его оцифровкой. Аналогичным образом система SCC выполняет обратный процесс, во время которого звуковой сигнал в транспортном средстве сначала преобразуется из свертки, выделяются форманты, соответствующие движению мускулатуры, производится объединение слов и синтаксических структур, чтобы в результате получить фразу, обладающую семантической структурой и смыслом. На каждом этапе добавляются коэффициенты шума, которые являются характеристикой водителя или транспортного средства и должны быть изучены системой распознания речи.
Между водителем и системой SCC также должны быть установлены некоторые соглашения, обеспечивающие эффективный и приятный разговор, например, язык/диалог, который будет использоваться, и практические ограничения (например, максимы Грайса). Должны быть приняты и адаптированы некоторые внешние условия, например, акустические условия транспортного средства и высота голоса, и т.д.
Соответственно, на различных этапах процесса распознавания речи модули 140 классификации могут быть использованы для подтверждения различных параметров для формирования моделей 210. Например, могут быть сформированы данные 150 профиля, касающиеся речевой модели конкретного оператора, данных 145 транспортного средства, которые могут относиться к фоновому шуму в транспортном средстве и т.д. Например, большую часть времени устройство 120 сбора данных с микрофона собирает фоновый шум, так как никто не разговаривает с компьютером 105. Акустическая система может выделять этот шум во времени с помощью акустической модели и применять фильтр для данного типа шума. Как известно, одной такой моделью является Ι/f или обратная частота, а другой моделью является Ι/f2 или обратная частота в квадрате. Также модели могут быть более сложными и могут использовать такие входные данные, как скорость транспортного средства, давление в шинах, срок службы шин, скорость ветра, скорость двигателя, требуемый крутящий момент, условия дорожного покрытия, температура, плотность воздуха, степень открытия окна и т.д. Многие из этих входных данных могут быть получены по сети транспортного средства, например, по шине локальной сети контроллеров (CAN) или ее аналогу. Модель акустической системы также может использовать такие входные данные, как габариты кабины транспортного средства, положение микрофона, акустические свойства сидений и т.д., которые относятся к конструкции транспортного средства. Другие входные данные для модели могут являться характеристиками водителя, например, рост и положение сидений.
Кроме того, чтобы выделить фоновый шум, акустическая система может иногда подавать известный звук с помощью динамиков (например, писк) и анализировать разницу между преобразованием Фурье этого писка и звука, полученного микрофоном. Подобную схему можно использовать для получения обратного фильтра, который усиливает и удаляет помехи из звуков транспортного средства, при этом фильтр шума удаляет непреднамеренные фоновые шумы для улучшения распознавания речи.
После настройки фильтров акустической системы в течение некоторого времени, становится возможным рассчитывать параметры фильтра для водителя транспортного средства в зависимости от условий окружающей среды, типа транспортного средства, скорости и т.д. Такой расчет также может быть уточнен путем использования известных звуков (например, писка, как было сказано выше) или из качества распознавания голоса, выполненного с множеством измерений. Для этого можно использовать фильтр Кальмана, который является простой обучающейся системой, или нейросеть, которая является более сложной системой. Аналогичным образом может быть получена модель для прогнозирования параметров акустической модели для водителя в другом транспортном средстве или другого водителя в данном транспортном средстве. Использование этих типов расчетов требует подключения к сети Интернет.
ОПИСАНИЕ ПРОЦЕССОВ
На Фиг. 4 представлена схема процесса 400 для определения настроек транспортного средства.
Процесс 400 начинается на этапе 405, на котором производится регистрация пользовательского устройства 155 на сервере 130. В общем случае регистрация устройства 155 может быть выполнена на сервере 130, когда пользователь готовится к эксплуатации транспортного средства, например, арендуемого транспортного средства, транспортного средства из парка, транспортного средства, используемого на правах группового пользования, и т.д. Регистрация может быть выполнена с помощью различных механизмов. Например, пользовательское устройство 155 может обращаться к GUI-интерфейсу через сервер 130 (например, согласно архитектуре REST (репрезентативная передача состояния)), позволяя пользовательскому устройству 155 подключиться к серверу, например, путем ввода имени пользователя и пароля. В качестве альтернативы приложение, установленное на пользовательском устройстве 155, например, приложение на смартфоне, использующее веб-сервис или подобную службу, может быть выполнено с возможностью доступа к серверу 130 в указанное время, когда пользователь находится в указанном месте или рядом с ним. Также с помощью GUI-интерфейса, приложения на смартфоне и т.п. пользователь может указать транспортное средство, на котором он планировал ехать, и на основе идентификации пользователя сервер 130 считывать данные о предварительном заказе пользователя или другую аналогичную информацию для определения транспортного средства. Регистрация пользовательского устройства 155 обычно включает в себя хранение в памяти сервера 130 уникального или практически уникального идентификатора для устройства 155.
Далее на этапе 410 сервер 130 обнаруживает пользовательское устройство 155 рядом с транспортным средством, т.е. находящееся на заданном расстоянии от него. Например, пользовательское устройство 155 может иметь аппаратные и программные средства для использования известной глобальной системы позиционирования (GPS) и может передавать GPS-данные серверу 130. В качестве еще одного примера беспроводной приемопередатчик ШЕЕ 802.11 на транспортном средстве, который может работать в режиме точки доступа, приема всех сетевых пакетов или мониторинга, может обнаружить смартфон, когда он попадает в его зону охвата (20-100 метров), в качестве альтернативы аналогичное устройство может быть выполнено с возможностью обнаружения объекта беспроводным приемопередатчиком Bluetooth в транспортном средстве, например, на расстоянии 5-20 метров. В качестве альтернативы компьютер 150 может обнаружить приближение пользовательского устройства 115 с помощью сотовой технологии, стандарта IEEE 802.11 и т.д., а также может передавать серверу информацию (например, с помощью сети 125) о том, что устройство приближается к транспортному средству и/или находится рядом с ним. В любом случае сервер 130 и/или компьютер 105 определят идентификатор, связанный с пользовательским устройством 155 и будут при необходимости его использовать в различных сообщениях. Кроме того, компьютер 105 может выдавать уникальный или практически уникальный идентификатор транспортному средству или, по крайней мере, типу (например, для определенной компании, модели, комплектации и т.д.) транспортного средства.
Далее на этапе 415 сервер 130 определяет исходные настройки 115 для транспортного средства, к которому приближается пользователь устройства 155. Например, сервер 130 может использовать данные 150 профиля и данные 145 транспортного средства для определения определенных настроек 115 (например, положения сидений, состояние коробки передач и т.д.). Модуль 135 прогнозирования может быть выполнен с возможностью генерирования стандартных моделей 210 соответствующих типов транспортных средств для водителя на основе модели 205 универсального представления типа транспортного средства, при этом при необходимости стандартные модели 210 также могут быть предоставлены для некоторых или всех настроек 115 в транспортном средстве конкретного типа.
Далее, если процесс 400 достигает этапа 420 в первой итерации, то сервер 130 отправляет компьютеру 105 настройки 115, определенные на этапе 415. В последующих итерациях процесса 400 сервер 310 отправляет настройки 115, определенные в соответствии с алгоритмом, описанным ниже со ссылкой на этапы 425-435.
Далее на этапе 425 настройки 115, переданные на этапе 420, применяются к транспортному средству, например, бортовой компьютер 105 может посылать инструкции через CAN-шину на различные контроллеры и/или исполнительные механизмы транспортного средства, например, на контроллер положения сиденья, положения зеркал, коробки передач, системы климат-контроля и т.д.
Далее на этапе 430 в процессе работы транспортного средства бортовой компьютер 105 осуществляет сбор данных 110. Например, как было сказано ранее, устройство 120 сбора данных может представлять собой датчики или другие аналогичные устройства, собирающие данные ПО в процессе работы транспортного средства. Также данные 150 профиля могут быть получены на основании введенных пользователем данных и т.д., как было сказано ранее. Соответственно, серверу 130 могут быть переданы контекстные данные, например, скорость, ускорение и торможение транспортного средства, настройки системы климат-контроля, освещения, использования стеклоочистителей и т.д.
Далее на этапе 435 с помощью модуля 135 прогнозирования, например, модули 140 классификации для обновления моделей 210, как было сказано ранее, сервер 130 обновляет и/или формирует модели 210 для формирования и/или обновления настроек 115, используемых бортовым компьютером 105.
Далее на этапе 440 сервер 130 определяет, следует ли продолжать процесс 400, например, определяет, способен ли сервер 130 продолжить связь с бортовым компьютером 105. Если да, то процесс переходит на этап 420. В противном случае процесс переходит на этап 445.
После этапа 440 процесс 400 завершается.
На Фиг. 5 приведена блок-схема процесса 500, относящаяся к определенным элементам процесса генерирования настроек 115 транспортного средства.
Процесс 500 начинается на этапе 505, где сервер 130 считывает набор собранных данных 110 пользователя, данных 145 транспортного средства, на котором пользователь намерен ехать (так называемое целевое транспортное средство), и/или данных 150 профиля пользователя.
Далее на этапе 510 модуль 135 прогнозирования классифицирует данные, полученные на этапе 505, например, на основании классов транспортных средств и/или пользователей. Например, данные 110 могут быть классифицированы так, чтобы определить, относятся ли они к целевому транспортному средству (например, данные 110 о сверхкомпактных транспортных средств могут относиться к ситуациям, когда целевым транспортным средством было сверхкомпактное или компактное транспортное средство, но никак не внедорожник или его аналог).
Аналогичным образом на этапе 515, который может быть выполнен после этапа 510, производится классификация данных 110 от других пользователей, поскольку эти данные могут быть релевантными, если другие пользователи имеют такие же физические характеристики, что и целевой пользователь (например, вес или рост), в противном случае их нельзя будет считать релевантными. В любом случае критерий классификации может быть передан на модуль 140 классификации, а данные могут быть разделены или классифицированы на этапе 510 для использования более точных данных при построении модели прогнозирования с целью формирования настроек 115.
Далее на этапе 520 сервер 130 считывает настройки 115 из предыдущего транспортного средства или транспортных средств, эксплуатируемых целевым пользователем, и/или из модели 205 универсального представления.
Далее на этапе 525 в качестве параметров для модуля 140 классификации используются настройки 115 из предыдущего транспортного средства или транспортных средств и/или модели 205 универсального представления, для формирования модели 210, которая, в свою очередь, может быть использована для формирования набора текущих настроек 115 для целевого транспортного средства. В общем случае определенные модули 140 классификации можно применять для оптимизации настроек 115, например, схемы чувствительности работы дросселя, в соответствии с предпочтениями целевого пользователя при существующих условиях, например, при определенном трении с дорогой. При изменении условий в общем случае необходимо идентифицировать параметры модели, которые должны быть изменены для внесения соответствующего изменения. В примерном варианте схемы работы дросселя изменение дорожных условий или типа привода (например, два или четыре ведущих колеса) может потребовать изменения чувствительности работы дросселя. Далее, когда водитель меняет одно транспортное средство на другое при тех же дорожных условиях, могут быть выполнены аналогичные изменения схемы работы дросселя, несмотря на различия между транспортными средствами. Также следует отметить, что параметры, указывающие на изменения погоды и типа привода, классифицируются как не относящиеся к транспортному средству контекстные параметры, а связанные с ними параметры, например, натяжение пружины педали и положение сиденья, являются относящимися к транспортному средству параметрами.
Далее на этапе 530 для целевого транспортного средства на основании модели или моделей 210, полученных на этапе 525, генерируются настройки 115.
После этапа 530 процесс 500 завершается.
В общем случае описанные в настоящем документе этапы процессов могут быть выполнены сервером 130 и/или бортовым компьютером 105. В частности, по крайней мере несколько описанных операций сервера 130 могут быть выполнены бортовым компьютером 105, например, операции модуля 135 прогнозирования. Аналогичным образом некоторые операции, которые обычно выполняются бортовым компьютером 105 (например, формирование настроек 115, как было сказано со ссылкой на этап 530 процесса 500), в качестве дополнения или альтернативы могут быть выполнены сервером 130, который затем может передать настройки 115 бортовому компьютеру 105 (например, по сети 125).
В общем случае для осуществления этапов или операций вышеуказанных процессов вычислительные устройства, аналогичные тем, что были рассмотрены выше, могут содержать инструкции, выполняемые одним или несколькими вычислительными устройствами, аналогичными тем, что были рассмотрены выше. Например, рассмотренные выше этапы процесса могут быть реализованы в виде машиночитаемых инструкций.
Машиночитаемые инструкции могут быть скомпилированы или транслированы из компьютерных программ, созданных с использованием различных языков и/или технологий программирования, включая, но не ограничиваясь перечисленным, языки Java™, С, С++, Visual Basic, Java Script, Perl и т.д. или их комбинации. В общем случае процессор или микропроцессор принимает инструкции, например, из запоминающего устройства или машиночитаемого носителя информации, и выполняет эти инструкции, тем самым реализуя один или несколько процессов, например, описанных выше. Такие инструкции и другие данные могут храниться и передаваться с помощью различных машиночитаемых носителей. Файл в вычислительном устройстве обычно представляет собой набор данных, хранящихся на машиночитаемом носителе, например, на носителе данных или в оперативном запоминающем устройстве, и т.д.
Машиночитаемый носитель включает в себя любые энергонезависимые носители, предоставляющие данные (например, инструкции), которые могут быть обработаны компьютером. Такой носитель может иметь множество форм, включая, но не ограничиваясь этим, постоянные и оперативные запоминающие устройства. Постоянными запоминающими устройствами могут быть, например, оптические или магнитные диски, а также другие виды энергонезависимых носителей. Оперативные запоминающие устройства могут представлять собой, например, динамическое оперативное запоминающее устройство (DRAM), которые обычно являются частью основного запоминающего устройства. Стандартными формами машиночитаемых носителей являются гибкий магнитный диск, жесткий диск, магнитная лента, любые другие виды магнитных носителей, CD-ROM, DVD, любые другие оптические носители, перфорированная лента, бумажная лента, любые другие физические носители информации с отверстиями, RAM, PROM, EPROM, FLASH-EEPROM, другие чипы или карты памяти, а также любые другие носители, с которыми может работать компьютер.
На чертежах одинаковые элементы обозначены одинаковыми ссылочными позициями. В некоторых случаях некоторые или все элементы могут быть изменены. В отношении описанных в данном документе процессов, систем, способов, и т.д., следует понимать, что, несмотря на обозначенную последовательность этапов, они могут быть выполнены в другой последовательности. Также следует понимать, что некоторые этапы могут быть выполнены одновременно, а также некоторые этапы могут быть добавлены или опущены. Другими словами описания процессов представлены лишь в качестве примера вариантов осуществления изобретения и не рассматриваются как ограничение изобретения.
Таким образом, следует понимать, что описание приведено в целях наглядности, а не ограничения. Многие дополнительные варианты реализации и применения, отличные от показанных примеров, станут очевидны при ознакомлении с вышеприведенным описанием. Объем не должен быть определен на основании приведенного выше описания, но, напротив, должен быть определен на основании прилагаемой формулы изобретения наряду с полным объемом эквивалентов, для которых данная формула является основанием. Предполагается и имеется в виду, что описываемые технологии могут быть развиты и усовершенствованы в будущем, причем раскрытые системы и способы будут включены в подобные будущие варианты реализации. Таким образом, следует понимать, что применение изобретения может быть изменено и модифицировано.
Все термины, применяемые в формуле изобретения, следует понимать в их наиболее широких разумных толкованиях и их обычных значениях, как это понимают специалисты в данной области техники, если иное явно не указано в описании изобретения. В частности, использование слов «какой-либо», «данный», «вышеуказанный» и т.д. надо понимать как один или несколько указанных элементов, если в формуле не указано иное.
ПРИМЕРЫ НАСТРОЕК
1. Настройки бортового компьютера
a. Настройки пользовательского интерфейса, которые подходят для данного пользователя (например, язык, размеры и расположение пиктограмм на сенсорном экране, необходимость подачи звуковых сигналов и т.д.)
b. Настройки пользовательского интерфейса, приспособленные для транспортного средства (обозначения вещей, которые имеют различный смысл на разных транспортных средствах)
c. Акустические параметры, приспособленные для системы «транспортное средство/пользователь»
d. Информация для связи с мобильными устройствами, например, посредством Bluetooth (см. также поз.12 ниже)
2. Рукоятки, замки, защелки
a. Настройки блокировки двери для защиты от открытия ребенком
b. Настройки блокировки окон
3. Подогреваемые задние фары, наружные зеркала, внутренние зеркала, стеклоочистители и т.д.
а. Погодные условия, при которых эти средства включаются и выключаются
4. Приборная панель и органы управления
а. Расположение и представление основных приборов на настраиваемой приборной панели
b. Расположение и представление аварийных сигналов
5. Подсветка кнопок
a. Представление и яркость ламп подсветки кнопок
6. Управление системой пассивной безопасности пассажиров
a. Включение/выключение и питание для подушек безопасности
7. Электрический замок/электрическая система блокировки
a. Включение/выключение электрической системы блокировки сдвижной двери/багажника
b. Положение люка и солнцезащитного экрана
c. Положение электрических свеклоподъемников
8. Управление положением сидений с электрической регулировкой
a. Переднее/заднее положение, верхнее/нижнее положение, поддержка спины, подлокотники, жесткость, положения спинки и т.д.
9. Солнцезащитный козырек
a. Подсветка
b. Положение
10. Управление стеклоочистителем/омывателем
a. Интервал срабатывания стеклоочистителей при конкретных погодных условиях
b. Расчетная частота подачи омывателя при конкретных погодных условиях для расчетного диапазона включения стеклоочистителей
11. Настройки климат-контроля
a. Предпочтительные значения температуры и влажности в салоне при заданных солнечных условиях
b. Тепло и водяной пар, выделяемые пассажирами 12.Сотовый телефон/карманное устройство
a. Список контактов
b. Информация для подключения Bluetooth
c. Пароль WiFi WPS
d. Сертификаты шифрования
e. МАС-адрес
13. Устройство открытия двери гаража
а. Коды и GPS-положения для использования с каждым из этих кодов
14. Круиз-контроль
a. Предпочтительные значения скорости движения при конкретных погодных условиях и состоянии водителя
b. Предпочтительные значения до впереди идущего транспортного средства при конкретных погоды и состоянии водителя
c. Предпочтительные значения снижения расхода топлива
15. Система запуска без ключа
a. Код доступа к транспортному средству
b. Код приемоответчика
16. Органы управления системой навигации
a. Местоположение транспортного средства
b. Наиболее вероятные пункты назначения
c. Предпочтительные значения времени, расстояния, эстетической привлекательности маршрута и экономии топлива для типовых путешествий
d. Типы дороги, предпочитаемые режимы передвижения, готовность оплаты дорожной пошлины, надежность и т.д.
e. Предпочтительные значения характеристик голоса и отображения
17. Электронное управление двигателем и дросселем
a. Предпочтительные рабочие значения
18. Акустические компоненты управления
a. Предпочтительные значения уровня шума в транспортном средстве
19. Предпочтительные значения отображения/диалога; часы, тахометр, уровень топлива, индикаторы/сигнальные лампы, устройства предупреждения о низком уровне топлива, система помощи выполнения парковки/движения задним ходом.
a. Предпочтительные характеристики голоса: пол, возраст, скорость речи и т.д.
b. Яркость и представление
20. Коробка передач
a. График предпочтительного переключения передач
21. Развлекательная система транспортного средства
a. Настройки радиостанций, жанры
b. Закладки; аудиокниги, подкасты, аудио CD/DVD, реклама и т.д.
c. Предпочтительные характеристики голоса: пол, возраст, скорость речи и т.д.
d. Данные о купонах и электронном кошельке 22.Внешнее освещение:
a. Включение/выключение вспомогательных (противотуманных) фар с ближним светом
b. Фары; определение момента переключения на ближний свет, цвет, яркость, направление света
c. Яркость фары заднего хода, световой режим, коды цифровой модуляции
d. Световой режим задних фонарей/стоп-сигналов, цвет, интенсивность, коды цифровой модуляции
23. Подсветка дверцы
а. Разрешение на использование подсветки при открывании дверцы
24. Руление четырьмя колесами
a. Условия, при которых включать режим руления четырьмя колесами
b. Предпочтительный режим и интенсивность руления четырьмя колесами
25. Усилитель руля
а. Характеристика сила/смещение, характеристика сопротивление/скорость, поведение на границе управляемости
26. Регулирование нагрузки/раскачивания прицепа
a. Уровень регулирования нагрузки, необходимый для каждого буксируемого прицепа
b. Уровень контроля раскачивания, необходимый для каждого буксируемого прицепа
27. Давление в шинах
a. Предпочтительное давление в шинах
28. Ограничитель звуков
а. Предпочитаемая звуковая схема для определенной скорости, нагрузки, местоположения и погодных условий



Изобретение относится к вспомогательным электронным системам транспортных средств. Техническим результатом является расширение арсенала технических средств установки пользовательских настроек. Вычислительное устройство, выполненное с возможностью идентифицировать приближающееся к транспортному средству пользовательское устройство и использовать для формирования настроек в транспортном средстве модель, которая сгенерирована по меньшей мере частично на основании идентификатора пользовательского устройства и идентификатора транспортного средства. В соответствии с моделью формируется по меньшей мере одна настройка для по крайней мере одного компонента транспортного средства, которая применяется к по меньшей мере одному компоненту транспортного средства. 3 н. и 17 з.п. ф-лы, 6 ил., 1 табл.
1. Система установки пользовательских настроек, содержащая:
первый компьютер, который включает в себя процессор и запоминающее устройство, выполненный с возможностью:
принимать идентификатор для оператора первого оборудования, которое является физической машиной, и идентификатор для этого первого оборудования;
принимать набор параметров, связанных с работой первого оборудования, причем параметры включают в себя по меньшей мере одни из данных профиля оператора, данных оборудования, и данных, собранных при работе первого оборудования;
определять универсальную модель для по меньшей мере одного компонента в первом оборудовании, при этом универсальная модель обеспечивает для оператора набор универсальных настроек для упомянутого по меньшей мере одного физического компонента во множестве оборудований, которое включает в себя первое оборудование, каждая из этих универсальных настроек обеспечивает одно или более аналогичных значений для каждого оборудования в упомянутом множестве оборудований;
генерировать, используя универсальную модель и упомянутый набор параметров, включающий в себя по меньшей мере один параметр, характеризующий среду, окружающую первое оборудование, модель, характерную для первого оборудования, которая включает в себя по меньшей мере одну настройку для оператора, использующего упомянутый по меньшей мере один компонент в первом оборудовании; передавать эту новую модель первому оборудованию; и второй компьютер в первом оборудовании, выполненный с возможностью применения упомянутой по меньшей мере одной настройки в этой новой модели для управления упомянутым по меньшей мере одним компонентом в первом оборудовании.
2. Система по п. 1, в которой первый компьютер дополнительно выполнен с возможностью: определять предыдущую модель для настроек упомянутого по меньшей мере одного компонента; и использовать эту предыдущую модель в дополнение к универсальной модели при генерации модели, характерной для первого оборудования.
3. Система по п. 1, в которой второй компьютер в первом оборудовании дополнительно выполнен с возможностью использовать модель, характерную для первого оборудования, для определения упомянутой по меньшей мере одной настройки.
4. Система по п. 1, в которой первый компьютер дополнительно выполнен с возможностью:
принимать второй набор параметров, связанных с эксплуатацией первого оборудования оператором; и
использовать по меньшей мере некоторые параметры из этого второго набора для генерирования второй модели, характерной для первого оборудования, для определения по меньшей мере одной настройки для оператора, использующего упомянутый по меньшей мере один компонент в первом оборудовании.
5. Система по п. 4, в которой первый компьютер дополнительно выполнен с возможностью:
передавать вторую модель, характерную для первого оборудования, второму компьютеру в первом оборудовании.
6. Система по п. 1, в которой первый компьютер дополнительно выполнен с возможностью:
приема второго набора параметров, связанных с эксплуатацией первого оборудования оператором;
использовать по меньшей мере некоторые параметры из этого второго набора для генерирования второй модели, характерной для второго оборудования, которая включает в себя по меньшей мере одну настройку для оператора, использующего упомянутый по меньшей мере один компонент во втором оборудовании; и
передавать эту вторую модель, характерную для второго оборудования.
7. Система по п. 1, в которой параметры, характеризующие среду, окружающую оборудование, включают в себя коэффициент трения.
8. Система по п. 1, в которой новая модель включает в себя соответствие положений дроссельной заслонки требуемым крутящим моментам.
9. Способ установки пользовательских настроек, содержащий:
прием идентификатора для оператора первого оборудования, которое является физической машиной, и идентификатора для этого первого оборудования;
прием набора параметров, связанных с работой первого оборудования, причем параметры включают в себя по меньшей мере одни из данных профиля оператора, данных оборудования, и данных, собранных при работе первого оборудования;
определение универсальной модели для по меньшей мере одного компонента в первом оборудовании, при этом универсальная модель обеспечивает для оператора набор универсальных настроек для упомянутого по меньшей мере одного физического компонента во множестве оборудований, которое включает в себя первое оборудование, каждая из этих универсальных настроек обеспечивает одно или более аналогичных значений для каждого оборудования в упомянутом множестве оборудований;
генерирование, используя универсальную модель и упомянутый набор параметров, включающий в себя по меньшей мере один параметр, характеризующий среду, окружающую первое оборудование, модели, характерной для первого оборудования, которая включает в себя по меньшей мере одну настройку для оператора, использующего упомянутый по меньшей мере один компонент в первом оборудовании;
передачу этой новой модели компьютеру в первом оборудовании; и
применение упомянутой по меньшей мере одной настройки в этой новой модели для управления упомянутым по меньшей мере одним компонентом в первом оборудовании.
10. Способ по п. 9, дополнительно содержащий: определение предыдущей модели для настроек упомянутого по меньшей мере одного компонента; и
использование этой предыдущей модели в дополнение к универсальной модели при генерации модели, характерной для первого оборудования.
11. Способ по п. 9, в которой компьютер в оборудовании выполнен с возможностью использовать модель, характерную для первого оборудования, для определения упомянутой по меньшей мере одной настройки.
12. Способ по п. 9, дополнительно содержащий:
прием второго набора параметров, связанных с эксплуатацией первого оборудования оператором; и
использование по меньшей мере некоторых параметров из этого второго набора для генерирования второй модели, характерной для первого оборудования, для определения по меньшей мере одной настройки для оператора, использующего упомянутый по меньшей мере один компонент в первом оборудовании.
13. Способ по п. 12, дополнительно содержащий:
передачу второй модели, характерной для первого оборудования, компьютеру в оборудовании.
14. Способ по п. 9, дополнительно содержащий:
прием второго набора параметров, связанных с эксплуатацией первого оборудования оператором;
использование по меньшей мере некоторых параметров из этого второго набора для генерирования второй модели, характерной для второго оборудования, которая включает в себя по меньшей мере одну настройку для оператора, использующего упомянутый по меньшей мере один компонент во втором оборудовании; и
передачу этой второй модели, характерной для второго оборудования, второму компьютеру во втором оборудовании.
15. Способ по п. 9, в котором параметры, характеризующие среду, окружающую оборудование, включают в себя коэффициент трения.
16. Способ по п. 9, в которой новая модель включает в себя соответствие положений дроссельной заслонки требуемым крутящим моментам.
17. Вычислительное устройство на борту транспортного средства, содержащее процессор и запоминающее устройство, при этом вычислительное устройство выполнено с возможностью:
обнаруживать, что пользовательское устройство приближается к транспортному средству;
передавать идентификатор для пользовательского устройства и идентификатор для транспортного средства на удаленный сервер;
принимать от удаленного сервера модель, характерную для транспортного средства, для генерирования данных настроек в транспортном средстве, при этом модель, характерная для транспортного средства, генерируется, по меньшей мере частично, на основе идентификатора для пользовательского устройства и идентификатора для транспортного средства с использованием универсальной модели, которая обеспечивает для оператора транспортного средства набор универсальных настроек для упомянутого по меньшей мере одного компонента во множестве транспортных средств, которое включает в себя данное транспортное средство, каждая из этих универсальных настроек обеспечивает одно или более аналогичных значений для каждого транспортного средства в упомянутом множестве транспортных средств, причем эта модель дополнительно генерируется, по меньшей мере частично, в соответствии с контекстными параметрами, относящимися к текущим операциям транспортного средства, причем контекстные параметры включают в себя данные, относящиеся к среде, окружающей транспортное средство;
генерировать по меньшей мере одну настройку для упомянутого по меньшей мере одного компонента в транспортном средстве в соответствии с моделью, которая характерна для упомянутого транспортного средства;
и применять упомянутую по меньшей мере одну настройку к упомянутому по меньшей мере одному компоненту в транспортном средстве.
18. Устройство по п. 17, дополнительно выполненное с возможностью: сбора данных, относящихся к работе транспортного средства, и отправки собранных данных удаленному серверу.
19. Устройство по п. 18, дополнительно выполненное с возможностью:
приема второй модели, характерной для транспортного средства, для генерирования настроек в транспортном средстве, генерирования по меньшей мере одной второй настройки для упомянутого по меньшей мере одного компонента в транспортном средстве в соответствии со второй моделью, характерной для транспортного средства; и
приема упомянутой по меньшей мере одной второй настройки упомянутого по меньшей мере одного компонента в транспортном средстве.
20. Устройство по п. 17, в котором компонентом является одно из сидения, зеркала, дроссельной заслонки, микрофона, громкоговорителя, установки климат-контроля, окна, солнцезащитного экрана, люка и системы управления рулением с усилителем.
| US 20130204455 A1, 08.08.2013 | |||
| US 20070013498 A1, 18.01.2007 | |||
| US 20040158373 A1, 12.08.2004 | |||
| ТЕЛЕМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2207262C1 |
| СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ ТРАНСПОРТНОГО СРЕДСТВА И ОПОВЕЩЕНИЯ | 2006 |
|
RU2298494C1 |

