Изобретение относится к областям электричества и физики, а именно к системам связи и радиопеленгации, и может быть использовано для информационно-навигационного обеспечения автономных необитаемых подводных аппаратов (АНПА), контролируемых с борта судна обеспечения.
Современные гидроакустические (ГА) системы позиционирования и связи должны совмещать в себе функции точного отслеживания местоположения цели, а также полнодуплексную связь.
Известен способ определения координат подводного объекта (патент RU 2691212, опубл. 11.06.2019), основанный на обработке данных о наклонной дальности подводного объекта относительно как минимум трех ГА буев. Способ реализуется в гидроакустической навигационной системе с длинной базой (ГАНС ДБ) и включает в себя следующие этапы:
- используется как минимум три ГА буя;
- ГА буи принимают сигналы ГНСС и определяют свои географические координаты;
- первый ГА буй передает сигнал запроса маяку-ответчику подводного объекта;
- второй и третий ГА буй синхронизируются с первым буем по времени по радиоканалу путем фиксирования момента начала передачи первого сигнала запроса;
- маяк-ответчик подводного объекта формирует и передает ответный сигнал;
- ответный сигнал подводного объекта принимается как минимум тремя ГА буями;
- определяются как минимум три наклонные дальности от ГА буев с известными координатами до подводного объекта;
- по полученным наклонным дистанциям определяются координаты объекта.
Недостатками этого аналога можно назвать проведение процесса расчета координат подводного объекта на стороне одного из ГА буев, что подразумевает отправку пакета данных с координатами на подводный объект для дальнейшего собственного координирования в географической системе координат, а также необходимость излучения ответных сигналов маяком-ответчиком подводного объекта при проведении процесса позиционирования. Выделенные недостатки способа приводят к увеличению времени на выполнение одной итерации определения координат подводного объекта, повышению загруженности ГА канала и, как следствие, затруднениям при необходимости передачи другой информации.
Известен способ определения координат АНПА (патент RU 2179730, опубл. 20.02.2002), основанный на определении и обработке данных о дальности и угловом положении АНПА относительно судна обеспечения. Способ реализуется в гидроакустической навигационной системе с ультракороткой базой (ГАНС УКБ), увеличивающей точность оценки пеленга при обработке зашумленного сигнала за счет следующих особенностей:
- пеленгатор ГА навигационной системы с УКБ содержит антенну с круговой базой с N приемными элементами;
- пеленгатор дополнительно снабжен N-канальным измерителем амплитуды;
- пеленгатор дополнительно снабжен N-канальным измерителем отношения сигнал-шум;
- расстояние между приемными элементами антенны выбирается в диапазоне от 0.5 до 3.0 длин волн навигационной частоты;
- при вычислении пеленга производится взвешенная обработка данных каждого канала на основе дополнительных измерений отношения сигнал-шум.
Недостатками этого способа можно назвать большое число элементов антенны (минимальное число каналов, указанное в аналоге, – 7), что приводит к увеличению вычислительной и конструктивной сложности, а, следовательно, и к увеличению стоимости итогового изделия.
Наиболее близким по своей сути к заявленному объекту техники является способ навигации подводного объекта (патент RU 2365939, опубл. 27.08.2009), который реализуется гидроакустической навигационной системой, содержащей ГА приемопередатчики, размещенные на подводном объекте, и ГА навигационной базой из ГА приемоответчиков, которые размещены на дрейфующих станциях (маяках) по водной поверхности и имеют ГНСС приемники для определения собственных координат. При этом на подводном объекте установлены приемники, формирующие две навигационные базы с общим центром, позволяющие определить направление на источник сигнала и дистанцию до него. Координаты подводного объекта относительно маяка или базы маяков определяются в режиме ДБ и/или УКБ.
Маяк может работать в режиме «запрос-ответ» для определения координат в системе УКБ, либо в режиме «пингер», когда маяки периодически излучают ГА сигналы с высокой точностью синхронизации для определения координат в системе ДБ. Переключением между режимами маяков может управлять подводный объект.
Также наличие ГА канала связи между маяком и подводным объектом позволяет обеспечить передачу служебной информации из наземного центра на подводный объект по спутниковому телеметрическому каналу через маяк, находящийся в зоне ГА связи с подводным объектом.
Недостатком прототипа является отсутствие возможности одновременного навигационно-информационного обеспечения нескольких подводных объектов, поскольку каждый из них сможет управлять режимами маяков, что приведет к коллизиям и прерыванию позиционирования.
Техническим результатом заявляемого изобретения является повышение эффективности взаимодействия между устройствами ГА комплекса позиционирования и связи для навигационно-информационного обеспечения двух и более АНПА.
Указанный технический результат достигается за счет того, что комплекс, состоящий из гидроакустической системы позиционирования и связи, выполняющую роль ведущего узла сети и состоящую из электронного модуля, размещаемого внутри корпуса автономного необитаемого подводного аппарата, и двух разночастотных антенн, и гидроакустической навигационной системы на основе ДБ, состоящую из нескольких плавучих гидроакустических маяков, дополнен автоматизированным рабочим местом оператора гидроакустических систем, состоящим из пульта корабельного оператора с предустановленным программным обеспечением и приемной антенны глобальной навигационной спутниковой системы.
Автоматизированное рабочее место оператора гидроакустических систем располагается на судне обеспечения, имеет функции двунаправленной связи и позиционирования в системе с УКБ и выполняет роль ведущего узла сети.
Система позиционирования с ДБ располагается на акватории и позволяет выполнять определение координат АНПА в пассивном режиме, то есть без излучения ответных сигналов со стороны АНПА.
Кроме этого, для обеспечения надежной передачи данных между гидроакустической системой позиционирования и связи и автоматизированным рабочим местом оператора гидроакустических систем используется два вида модемов: на базе модуляции с ортогональным разделением частот и широкополосной модуляции.
В одном из вариантов изобретения две разночастотные антенны, расположенные в гидроакустической системе позиционирования и связи, настроены на частоты 15 и 25 кГц.
Подобная структура комплекса позволяет создать сеть с разделением абонентов, состоящей из нескольких узлов (ГА устройств), выполняющих различные задачи, но имеющих возможность взаимодействовать друг с другом, что дает возможность производить детектирование наличия двух и более АНПА в зоне действия связи.
Сущность изобретения поясняется фигурами, на которых изображены:
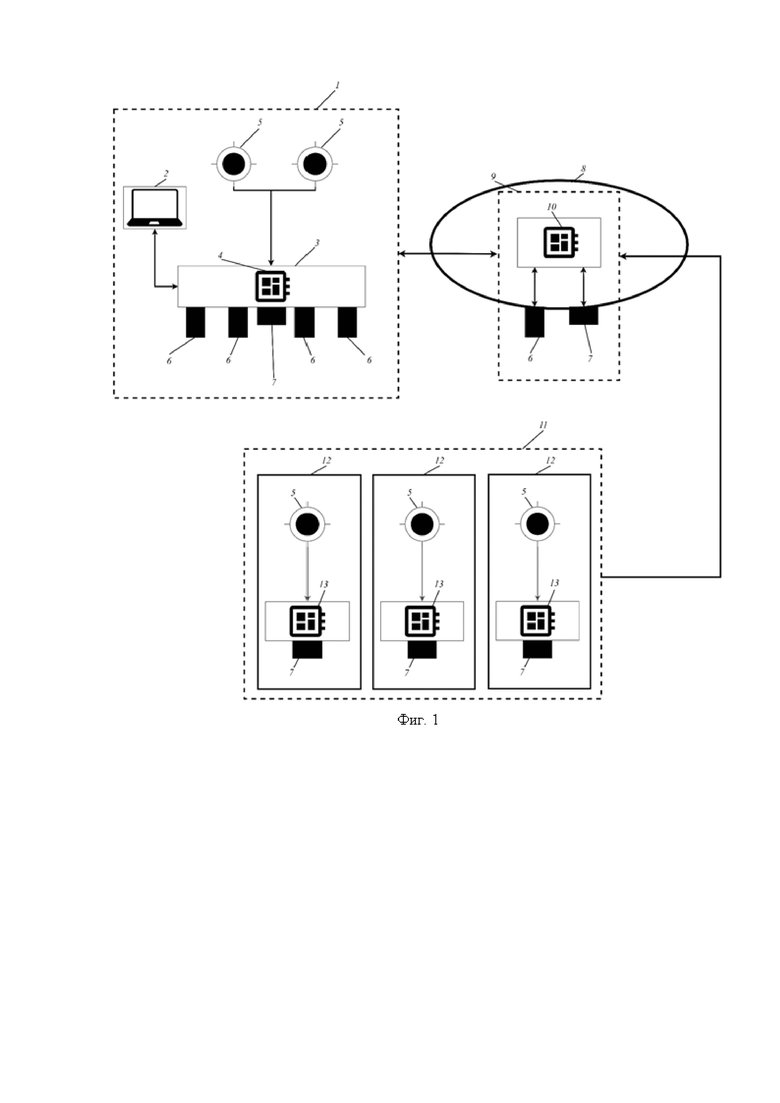
на фиг. 1 – структурная схема ГА комплекса позиционирования и связи для навигационно-информационного обеспечения двух и более АНПА;
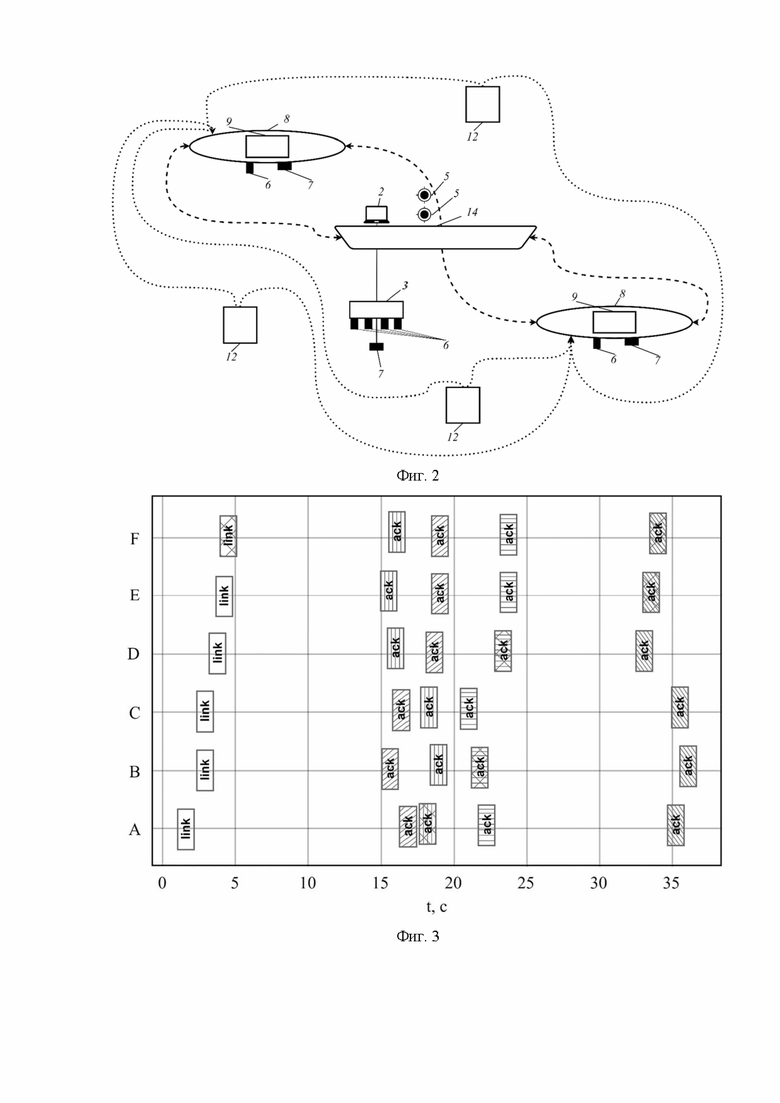
на фиг. 2 – пример осуществления работы комплекса с двумя АНПА;
на фиг. 3 – пример обнаружения устройств на акватории.
В состав комплекса средств позиционирования и связи для навигационно-информационного обеспечения АНПА входит (см. фиг. 1):
1. Гидроакустическая система позиционирования и связи (ГСПС) 9, размещаемая на АНПА 8.
2. Автоматизированное рабочее место оператора гидроакустических систем (АРМ ОГАС) 1, размещаемое на судне обеспечения.
3. Гидроакустическая навигационная система на основе длинной базы (ГАНС ДБ) 11, развертываемая на акватории для проведения работ.
ГСПС 9 состоит из электронного модуля цифровой обработки сигналов (ЦОС) 10, размещаемого внутри корпуса АНПА 8, и двух внешних разночастотных ГА антенн (15 и 25 кГц – позиции 6 и 7 соответственно) для комбинирования дальности и скорости модемной связи. Позиционирование осуществляется либо в активном режиме в системе с УКБ 3 с помощью обмена ГА посылками на базе широкополосных сигналов с АРМ ОГАС 1, внутри которых передаются абсолютные координаты АНПА 8, либо в пассивном режиме в ГАНС ДБ 11 с помощью приема ГА посылок от нескольких маяков ДБ 12. Для обеспечения надежного обмена информацией в различных гидрологических используется два типа модемов, реализованных в электронном модуле ЦОС 10: на базе модуляции с ортогональным разделением частот (OFDM - Orthogonal Frequency-Division Multiplexing) и широкополосной модуляции (DSSS – Direct Sequence Spread Spectrum). Управление ГСПС 9 осуществляется по интерфейсу Ethernet.
Дальность связи составляет до 4 километров, скорость передачи данных в зависимости от условий связи составляет до 2 кбит/сек, рабочая глубина – 1 км.
ГСПС 9 выполняет следующие функции:
- детектирование по команде наличия в зоне действия ГА связи других АНПА 8, оборудованных ГСПС 9, а также АРМ ОГАС 1;
- определение своего положения в активном режиме в относительных и абсолютных географических координатах посредством ГА связи с АРМ ОГАС 1;
- двунаправленный обмен данными со всеми АНПА 8, а также АРМ ОГАС 1, находящимися в зоне действия связи.
АРМ ОГАС 1 состоит из ГА модуля связи и позиционирования на основе системы с УКБ 3, двумя антеннами ГНСС 5 для определения собственных координат и ориентации относительно севера, пульта корабельного оператора (ПКО) 2 с установленным программным обеспечением (ПО). УКБ 3 состоит из электронного модуля ЦОС 4, позволяющего производить позиционирование АНПА с помощью четырех приемных ГА антенн 6 и использовать модемы OFDM и DSSS для двунаправленной связи с помощью приемопередающей ГА антенны 7, которая может быть заменена на ГА антенну 6 для смены центральной частоты.
Дальность связи УКБ 3 достигает 3,5 километров, а скорость передачи данных может варьироваться до двух 2 кбит/сек в зависимости от гидрологических условий.
АРМ ОГАС 1 выполняет следующие функции:
- детектирование наличия в зоне действия ГА связи АНПА 8, оборудованных ГСПС 9;
- определение положения всех АНПА 8 в зоне действия связи в относительных и абсолютных географических координатах в активном режиме;
- определение дальности до всех АНПА 8 в зоне действия связи;
- определение направления на все АНПА 8 в зоне действия связи;
- двунаправленный обмен данными со всеми АНПА 8, находящимися в зоне действия связи.
ГАНС ДБ 11 состоит из трех плавучих ГА маяков ДБ 12, размещаемых на акватории перед началом проведения работ. ГА маяки ДБ 12 снабжены антеннами ГНСС 5, электронными модулями ЦОС 13 и передающими ГА антеннами 7. С помощью антенн ГНСС 5 определяется местоположение маяков ДБ 12, с помощью электронных модулей ЦОС 13 генерируются телеметрические пакеты с координатами маяков ДБ 12 и позиционирующие сигналы, которые излучаются в воду с помощью ГА антенн 7. Маяки ДБ 12 имеют аккумуляторную батарею и включаются автоматически при опускании в воду.
Для определения координат АНПА должен находиться в пределах 1 км от каждого из маяков ДБ 12 одновременно.
ГАНС ДБ 11 выполняет следующие функции:
- формирование ГА посылок, служащих для определения положения АНПА 8 в абсолютных географических координатах в пассивном режиме.
Определение местоположения АНПА 8 системой УКБ 3 происходит путем измерения наклонной дальности и угла на цель и их пересчета в географические координаты. Измерение наклонной дальности производится на основе измерения времени между передачей сигнала запроса и ожидания ответа от ГСПС 9, расположенном на АНПА 8. Дополнительное уточнение положения АНПА 8 производится с помощью установленного на АНПА 8 датчика давления, который определяет глубину устройства и передает ее значение на устройство УКБ 3. Полученные данные на устройстве УКБ 3 пересчитываются в абсолютные координаты, после чего передаются на ГСПС 9 с помощью модема.
Определение местоположения АНПА 8 ГАНС ДБ 11 реализуется путем определения расстояний до пространственно-разнесенных маяков ДБ 12 с точно известными координатами и решения соответствующей нелинейной системы уравнений, неизвестными в которой являются координаты АНПА 8, а также временной сдвиг между часами ГСПС 9 и часами ГА маяков ДБ 12, синхронизированными с временем антенн ГНСС 5. Для решения такой навигационной задачи используется алгоритм на основе расширенного фильтра Калмана (EKF – Extended Kalman Filter), учитывающий такие аспекты как: выбор начального состояния фильтра Калмана, варьируемый интервал поступления сигналов позиционирования, обработка выбросов фильтрации, отсутствие статичного положения у маяков ДБ 12.
Для обеспечения надежной передачи данных между устройствами ГСПС 9 и АРМ ОГАС 1 в разработанных устройствах используется два вида модемов: OFDM модем и DSSS модем для оптимального использования той или иной схемы модуляции в зависимости от текущих условий.
Для информационно-навигационного обеспечения двух и более АНПА 8 оптимальным является вариант выполнения предлагаемого комплекса в виде сети, состоящей из узлов (ГА устройств), с разделением абонентов для доступа к среде на основе резервирования канала. В такой сети от различных типов узлов требуется обеспечить реализацию процесса отправки информационного сообщения, при этом сначала предполагаемому получателю передается короткий контрольный пакет, обычно называемый Request-to-Send (RTS). Если целевой узел принимает этот пакет RTS без коллизий, то предоставляет доступ к каналу исходного узла-источника путем ответа с помощью пакета Clear-to-Send (CTS). Когда исходный узел-источник принимает адресованный ему CTS, он может использовать канал связи, зарезервированный исключительно для его передачи. Тем временем все прочие узлы, которые получают CTS, не адресованный им, откладывают свои передачи, потому что канал зарезервирован для другого узла. После приема пакета данных принято отправлять короткое подтверждение (Acknowledgement – ACK) исходному узлу-источнику об успешной доставке. Такой подход резервирования канала обеспечивает надежный доступ к среде с минимальной вероятность возникновения коллизий.
В предлагаемом ГА комплексе система доступа к среде на основе резервирования канала реализована за счет добавления в программное обеспечение каждого устройства комплекса сетевого уровня из сетевой модели OSI. Протоколы данного уровня в предлагаемом ГА комплексе позволяют обрабатывать получаемые информационные пакеты, отбрасывать ненужные, отправлять запросы и подтверждения, резервировать канал и выполнять процесс взаимодействия между несколькими устройствами.
Рассмотрим пример работы заявленного комплекса одновременно с двумя АНПА 8 (см. фиг. 2, стрелки обозначают однонаправленное или двунаправленное взаимодействие между объектами). Оба аппарата имеют у себя на борту ГСПС 9, также на акватории размещается ГАНС ДБ 11, состоящая из трех ГА маяков ДБ 12, и судно обеспечения 14, на борту которого расположено АРМ ОГАС 1.
За счет разделения функций информационно-навигационного сопровождения АНПА 8 между несколькими устройствами, но при этом наличия возможности взаимодействия между этими устройствами, можно достичь независимого выполнения следующих задач:
- произвести детектирование наличия обоих АНПА 8 в зоне действия связи как на судне обеспечения с помощью АРМ ОГАС 1, так и самими АНПА 8 с помощью ГСПС 9;
- производить двунаправленный обмен данными между двумя АНПА 8 и между любым из АНПА 8 и АРМ ОГАС 1, например, отправлять телеметрические сообщения, содержащие координаты, или инструкции по изменению миссии АНПА 8, передавать изображения, данные о скорости звука, температуре воды и т.д.;
- непрерывно принимать позиционирующие сигналы от маяков ДБ 12 на ГСПС 9 и определять координаты АНПА 8 в пассивном режиме, т.е. без излучения ответного сигнала;
- при необходимости принимать позиционирующие сигналы от УКБ 3 на ГСПС 9 и определять координаты АНПА 8 в активном режиме, т.е. с излучением ответного сигнала.
По отдельности данные задачи реализованы в более ранних патентах, рассмотренных в качестве аналогов, однако в предлагаемой системе все эти задачи выполняются независимо друг от друга, не приводят к коллизиям и могут быть распространены на любое количество сопровождаемых АНПА 8 за счет использования сетевого уровня.
Рассмотрим пример работы заявляемого комплекса на сетевом уровне. На фиг. 3 представлена временная диаграмма обмена информационными пакетами между 6 устройствами: устройство А – АРМ ОГАС (информационные пакеты без штриховки на фиг. 3), устройство B – ГСПС (информационные пакеты заштрихованы с наклоном вправо на фиг. 3), устройство C – ГСПС (информационные пакеты заштрихованы горизонтально на фиг. 3), устройство D – ГСПС (информационные пакеты заштрихованы с наклоном влево на фиг. 3), устройство E – ГСПС (информационные пакеты заштрихованы вертикально на фиг. 3), устройство F – ГСПС.
Пусть устройству А требуется определить наличие всех ГСПС на акватории. С помощью DSSS модема устройство А излучает служебную широковещательную команду, которую принимают все активные устройства B-F на акватории. Данная команда инициализирует начало установки ГА соединения. Все устройства, которые ее примут, должны ответить в случайный момент времени (во избежание коллизий с другими устройствами). Ответ будет содержать идентификационный номер (ID) устройства. Все устройства, которые примут этот ответ будут знать, что устройство с соответствующим ID доступно для связи.
Устройство А передает широковещательный запрос link, остальные устройства принимают его (кроме устройства F – до него команда не дошла из-за наличия ошибок в канале связи, непринятый информационный пакет на фиг. 3 перечеркнут крест на крест) и отвечают в случайные моменты времени командой ack.
В отличие от известного способа в предлагаемом изобретении произведена оптимизация взаимодействия между устройствами ГА комплекса позиционирования и связи для навигационно-информационного обеспечения одного и более АНПА. Оптимизация заключается в разделении функций информационно-навигационного сопровождения двух и более АНПА таким образом, чтобы обеспечивался двунаправленный обмен данными между любым АНПА и судном обеспечения, а также чтобы производилось определение координат всех АНПА на акватории, причем обе эти задачи должны выполняться независимо и без возникновения коллизий. Это достигается за счет того, что предлагаемый комплекс выполнен в виде сети с разделением абонентов, состоящей из нескольких узлов (ГА устройств), выполняющих различные задачи, но имеющих возможность взаимодействовать друг с другом. Определение местоположения АНПА может быть произведено системой с УКБ на стороне АРМ ОГАС в активном режиме или системой с ДБ на стороне ГСПС в пассивном режиме. Полезная информация может быть передана между ГСПС и АРМ ОГАС с использованием двух видов модуляции, которые выбираются автоматически в зависимости от гидрологических условий.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫСОКОТОЧНОГО КООРДИНИРОВАНИЯ ПОДВОДНОГО КОМПЛЕКСА В УСЛОВИЯХ ПОДЛЕДНОГО ПЛАВАНИЯ | 2013 |
|
RU2555479C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАЧАЛЬНЫХ КООРДИНАТ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2016 |
|
RU2629916C1 |
| УТОЧНЕННОЕ ПОЗИЦИОНИРОВАНИЕ В ПОДВОДНОМ НАВИГАЦИОННОМ ПРОСТРАНСТВЕ, ОБРАЗОВАННОМ ПРОИЗВОЛЬНО РАССТАВЛЕННЫМИ ГИДРОАКУСТИЧЕСКИМИ МАЯКАМИ-ОТВЕТЧИКАМИ | 2011 |
|
RU2488842C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СИСТЕМА БЕЗОПАСНОСТИ ОБЪЕКТА В ОТКРЫТОЙ АКВАТОРИИ | 2017 |
|
RU2650798C1 |
| ТЕХНОЛОГИЯ УТОЧНЕННОГО ПОЗИЦИОНИРОВАНИЯ В ПОДВОДНОМ НАВИГАЦИОННОМ ПРОСТРАНСТВЕ МОБИЛЬНОГО ПОЛИГОНА | 2012 |
|
RU2507532C2 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| СИСТЕМА ПРИВЕДЕНИЯ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА К ДОННОМУ ПРИЧАЛЬНОМУ УСТРОЙСТВУ | 2020 |
|
RU2750550C1 |
| Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата, выполняющего мониторинг подводного добычного комплекса | 2021 |
|
RU2756668C1 |
| Способ навигационно-информационной поддержки глубоководного автономного необитаемого подводного аппарата | 2018 |
|
RU2689281C1 |
Использование: изобретение относится к областям электричества и физики, а именно к системам связи и радиопеленгации, и может быть использовано для информационно-навигационного обеспечения автономных необитаемых подводных аппаратов (АНПА), контролируемых с борта судна обеспечения. Сущность: гидроакустический комплекс позиционирования и связи для навигационно-информационного обеспечения автономных необитаемых подводных аппаратов включает в себя гидроакустическую систему позиционирования и связи, состоящую из электронного модуля, размещаемого внутри корпуса автономного необитаемого подводного аппарата, и двух разночастотных антенн, и гидроакустическую навигационную систему на основе длинной базы, состоящую из по крайней мере трех плавучих гидроакустических маяков, каждый из которых оснащен приемной антенной глобальной навигационной спутниковой системы и передатчиком, выраженным в виде гидроакустической антенны, излучающим информацию о местоположении маяков. Гидроакустический комплекс дополнительно оборудован как минимум одним автоматизированным рабочим местом оператора гидроакустических систем, состоящим из пульта корабельного оператора с предустановленным программным обеспечением, навигационной системы на основе ультракороткой базы и приемной антенны глобальной навигационной спутниковой системы. Гидроакустическая система позиционирования и связи выполнена с возможностью определения координат каждого автономного необитаемого аппарата в пассивном режиме, т.е. не излучая ответных сигналов, и осуществления надежного двунаправленного обмена информацией с другими устройствами в различных гидрологических условиях, используя два типа модемов: на базе модуляции с ортогональным разделением частот и широкополосной модуляции. Технический результат: повышение эффективности взаимодействия между устройствами гидроакустического комплекса позиционирования и связи для навигационно-информационного обеспечения двух и более АНПА. 1 з.п. ф-лы, 3 ил.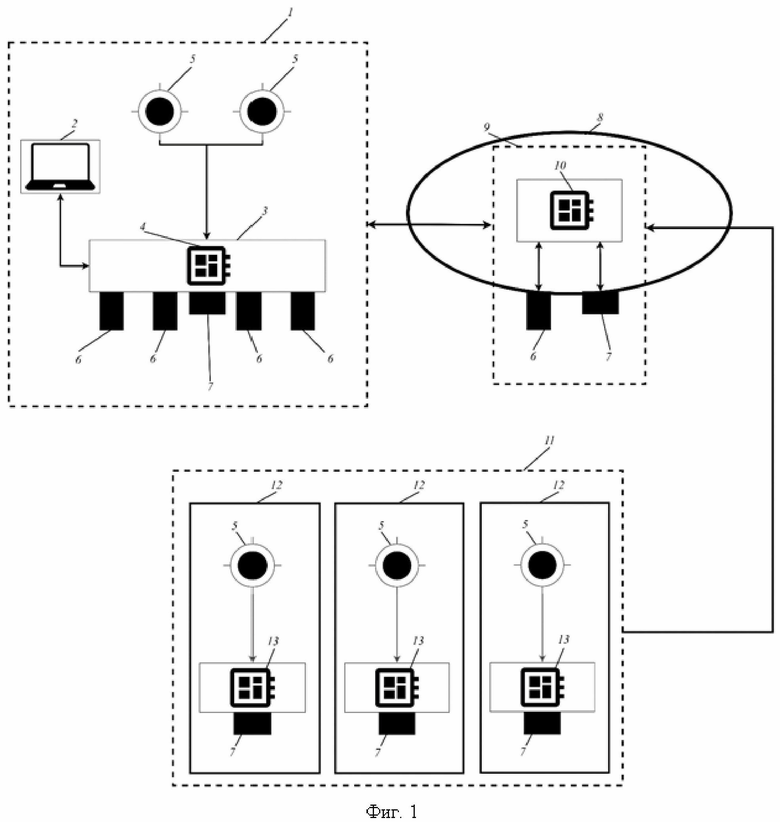
1. Гидроакустический комплекс позиционирования и связи для навигационно-информационного обеспечения автономных необитаемых подводных аппаратов, включающий в себя гидроакустическую систему позиционирования и связи, состоящую из электронного модуля, размещаемого внутри корпуса автономного необитаемого подводного аппарата, и двух разночастотных антенн, и гидроакустическую навигационную систему на основе длинной базы, состоящую из по крайней мере трех плавучих гидроакустических маяков, каждый из которых оснащен приемной антенной глобальной навигационной спутниковой системы и передатчиком, выраженным в виде гидроакустической антенны, излучающим информацию о местоположении маяков, отличающийся тем, что гидроакустический комплекс дополнительно оборудован как минимум одним автоматизированным рабочим местом оператора гидроакустических систем, состоящим из пульта корабельного оператора с предустановленным программным обеспечением, навигационной системы на основе ультракороткой базы и приемной антенны глобальной навигационной спутниковой системы, а гидроакустическая система позиционирования и связи выполнена с возможностью определения координат каждого автономного необитаемого аппарата в пассивном режиме, не излучая ответных сигналов, и осуществления надежного двунаправленного обмена информацией с другими устройствами в различных гидрологических условиях, используя два типа модемов: на базе модуляции с ортогональным разделением частот и широкополосной модуляции.
2. Гидроакустический комплекс по п. 1, отличающийся тем, что две разночастотные антенны, расположенные в гидроакустической системе позиционирования и связи, настроены на частоты 15 и 25 кГц.
| Способ позиционирования самоходного необитаемого подводного аппарата, выполняющего мониторинг подводной акватории | 2022 |
|
RU2794555C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| Устройство для зачерпывания материала в погрузочных машинах | 1950 |
|
SU89249A1 |
| US 7139647 B2, 21.11.2006 | |||
| CN 104870940 A, 26.08.2015. | |||
