Изобретение относится к области морской техники и предназначено для автономного наведения самоходных подводных аппаратов к донному причальному устройству.
В настоящее время существует ряд задач, выполняемых автономными необитаемыми подводными аппаратами (АНПА), решение которых предполагает многократное повторение миссий в ограниченной акватории. При этом стоимость межпоходового обслуживания АНПА может составлять существенную часть эксплуатационных расходов и, следовательно, ограничивать частоту его применения [1].
За исключением случаев, когда автономный необитаемый подводный аппарат запускается от пирса или берега, его эффективность зависит от характеристик судна-носителя, которые необходимо учитывать при планировании подводных работ АНПА в системе «судно - АНПА», включающей АНПА, судно-носитель с пусковым устройством, системой управления АНПА и системой его технического обслуживания. Иногда, например, в штормовых условиях, систему «судно - АНПА» использовать вообще невозможно. Для таких случаев применяют донные причальные устройства (ДПУ), которые обеспечивают подводную зарядку аккумуляторной батареи АНПА и его информационный обмен с судном - снятие накопленной информации и получение новых заданий. ДПУ увеличивают время работы АНПА под водой независимо от судна-носителя и обеспечивают ее высокую эффективность при выполнении многократных миссий в пределах одной акватории, например, при охране порта, нефтяной платформы или мониторинге подводной среды [2, с. 13]. ДНУ с помощью подводного кабеля с силовыми и информационными связями подключается к специальному береговому посту, управляющему одним или группой АНПА. ДПУ с автономным источником питания могут выставляться судном в любом районе Мирового океана и на любой глубине, делая автономность АНПА практически неограниченной [2, с. 14].
Известны ДПУ, обеспечивающие базирование АНПА и их зарядку, являющиеся аналогом изобретения. В 2009 году в Японии разработано ДПУ для стыковки и отработки фундаментальных технологий подводного базирования с АНПА-тримараном «Marine Bird». Оно обеспечивает наведение АНПА на ДПУ, их подводную стыковку, заряд аккумуляторной батареи и информационный обмен [2, с. 14]. В США разработано донное причальное устройство для АНПА «REMUS», представляющее собой переносной комплекс «REMUS» (Remote Environmental Monitoring UnitS), созданный Oceanographic Systems Laboratory и Woods Hole Oceanographic Institute (WHOI) для подводно-инспекционных работ в условиях мелкого моря.
Указанные ДПУ состоят из причального конуса, ведущего к цилиндрической части с внутренним диаметром, незначительно превышающим диаметр корпуса АНПА. Для стыковки со своим ДПУ осуществляется акустическое приведение АНПА, который оснащается гидроакустической навигационной системой с ультракороткой базой (ГАНС УКБ) или Relative Acoustic Tracking System (RATS). Эта система обеспечивает точное определение дистанции и положения аппарата относительно транспондера. Направление захода АНПА в ДПУ может быть заложено в программу миссии аппарата перед его запуском или непосредственно измерено и передано на АНПА по гидроакустическому каналу связи. ДПУ имеет компас, включенный в состав его электронных систем.
Существенным недостатком известных ДПУ является ограниченное использование в районах с интенсивным подводным течением. Если скорость течения соизмерима со скоростью хода АНПА, то ДПУ необходимо развернуть, чтобы курс подхода АНПА был параллелен преобладающему направлению течения, что достаточно проблематично [2, с. 16-17].
Как аналог изобретения известна система приведения АНПА к ДПУ, включающая, АНПА, оснащенный бортовой навигационной системой, и ДПУ типа «Bluefin», разработанное в институте Monterey Bay Aquarium Research Institute (MBARI) США и имеющее контейнер с аппаратурой управления, включающей измеритель дистанции - гидроакустический маяк (ГАМ), Ethernet-антенну, привод фиксатора АНПА. Корпус ДПУ изготовлен из стеклопластика в виде трубы с диаметром, превышающим диаметр аппарата на 0,03 м. Причальный конус плавно сопрягается с корпусом и изготовлен из пластиковых реек, удерживающихся с помощью колец из нержавеющей стали. Для движения в области действия ГАМ, составляющей 2 км с углом обзора ±85°, АНПА использует бортовую навигационную систему и наводится на ДПУ методом поиска направления, когда система управления просто удерживает направление на маяк.
Существенным недостатком известной системы является то, что алгоритм управления не может компенсировать подводное течение, и аппарат сносится течением во время наведения [2, с. 18-19].
Гидроакустический маяк необходим для точного определения места АНПА и направления его движения к ДПУ [3]. По принципу действия донные ГАМ подразделяются на маяки-ответчики, излучающие ответный сигнал после приема сигнала запроса, и маяки-пингеры, работающие по заданной программе [4, с. 302]. Для обеспечения меньшей заметности АНПА, а также других подводных плавсредств, применяют гидроакустические маяки-ответчики (ГАМО), излучающие сигналы в результате приема гидроакустического кодированного сигнала-запроса [5].
Указанный аналог имеет существенный недостаток, характеризующийся сносом АНПА течением и значительным угловым отклонением курса наведения на ДПУ от требуемого. Поэтому для обеспечения стыковки АНПА с ДПУ одного ГАМ недостаточно, навигационной системе АНПА требуется учитывать течение и корректировать возникающий из-за этого угол сноса.
Известна навигационная система с ведущим кабелем, создающая электромагнитный коридор судовождения. Она включает электростанцию питания, проложенный по дну фарватера кабель, гидроакустические отметчики для обозначения характерных точек на трассе, приемное устройство бортовой аппаратуры, имеющее приемные рамки из трех взаимно перпендикулярных сердечников и насаженными на них катушками, тремя усилителями, настроенными на частоту тока в кабеле, стрелочные индикаторы корабельной (судовой) аппаратуры, определяющие положение корабля (судна) относительно кабеля «слева» или «справа» и направление движения корабля (судна) «к кабелю» или «от кабеля» [6, с. 208-210].
За прототип изобретения принята навигационная система с ведущим кабелем, оборудуемая в морском районе с применением автономного необитаемого подводного аппарата [7], включающая ведущий кабель, два гидроакустических датчика, два якоря с заземлителями, блок с источником тока, его преобразователем, генератором и аппаратурой приема и излучения гидроакустических сигналов, включающей электронный блок с усилителем, шифратором и дешифратором, обеспечивающий создание электромагнитного коридора судовождения вдоль ведущего кабеля и связь системы ведущего кабеля с пунктом управления и объектами навигации. Дополнительно для обеспечения объектов навигации координатами и обозначения концов ведущего кабеля к якорю-заземлителю может крепиться гидроакустический маяк-ответчик или гидроакустический отметчик [7].
Однако данная навигационная система не включает в себя в качестве объектов обеспечения технические устройства, располагаемые на морском дне, в том числе и причальные, и не предусматривает зарядки аккумуляторных батарей подводных объектов.
Технической задачей и целью изобретения является разработка системы приведения АНПА к ДПУ, имеющей высокую точность позиционирования и обеспечивающей надежное приведение АНПА к ДПУ в условиях интенсивных подводных течений.
Указанная задача решается благодаря тому, что в системе приведения автономного необитаемого подводного аппарата к донному причальному устройству, включающей, навигационную систему с ведущим кабелем, имеющей два якоря с заземлителями, блок с источником тока, его преобразователем, генератором и аппаратурой приема и излучения гидроакустических сигналов с электронным блоком и усилителем, шифратором и дешифратором, гидроакустические датчики, маяки-ответчики или отметчики, имеются следующие отличия: якорь-заземлитель, гидроакустический датчик, маяк-ответчик или отметчик прикреплены к первому концу ведущего кабеля, ко второму концу ведущего кабеля крепится второй якорь-заземлитель и донное причальное устройство, имеющее причальный конус, измеритель дистанции, корпус причального устройства, Ethernet-антенну, стопорное устройство, аппаратуру управления и опору, с находящейся внутри электростанцией, преобразователем тока и генератором, автономный необитаемый подводный аппарат имеет устройство приема сигналов ведущего кабеля и Ethernet-антенну.
Общее устройство системы приведения АНПА к ДПУ и проводка АНПА к ДПУ по трассе ведущего кабеля приведено на фиг. 1. На фиг. 2 приведено устройство ДПУ, а на фиг. 3 приведен АНПА, пристыкованный к ДПУ.
Цифрами на фиг.1, 2 и 3 обозначены:
1 - АНПА,
2 - вектор скорости АНПА,
3 - причальный конус ДПУ,
4 - измеритель дистанции,
5 - корпус ДПУ,
6 - Ethernet-антенна,
7 - стопорное устройство,
8 - аппаратурой управления,
9 - опора ДПУ с электростанцией питания и преобразователем тока,
10 - второй якорь-заземлитель навигационной системы с ведущим кабелем,
11 - ведущий кабель,
12 - морское дно,
13 - взаимодействие устройства приема сигналов ведущего кабеля АНПА с электромагнитным полем ведущего кабеля,
14 - гидроакустический маяк-ответчик,
15 - первый якорь-заземлитель навигационной системы с ведущим кабелем,
16 - стопор.
Для стыковки АНПА (1) с корпусом ДПУ (5) используется гидроакустический маяк-ответчик (14), обозначающий начало ведущего кабеля (11) и включающий его по запросу АНПА. Следуя вдоль ведущего кабеля (11) АНПА (1) с помощью устройства приема сигналов регистрирует (13) его электромагнитное поле и вырабатывает в приборах управления требуемый курс и скорость (вектор движения) (2), необходимые для стыковки с корпусом ДПУ (5).
ДПУ имеет причальный конус (3), служащий для захвата АНПА (1) при небольших отклонениях его от траектории, измеритель дистанции (4), помогающий АНПА (1) в расчетах параметров сближения с ДПУ, корпус (5), служащий для крепления в нем АНПА (1) с помощью стопорного устройства (7), аппаратуру управления (8), с помощью которой ДПУ осуществляет управление работой ведущего кабеля (11) и самого ДНУ после стыковки с АНПА (1), зарядкой аккумуляторной батареи (на фиг. не показано) АНПА (1), а также отстыковкой АНПА (1) и переводом ДПУ в дежурный или рабочий режимы. В опоре (9) располагаются электростанция питания, преобразователь тока, генератор и второй якорь-заземлитель (10) ведущего кабеля (И). Модифицированная стандартная беспроводная Ethernet-антенна (6) обеспечивает информационный обмен ДПУ с АНПА (1) после их стыковки, АНПА имеет такую же антенну (на фиг. не показано) в верхней части корпуса [2, с. 18].
Якоря-заземлители служат для заземления генератора и конца ведущего кабеля [4, с. 206]: один полюс генератора, соединенный с одножильным кабелем заземляется на конце ведущего кабеля первым якорем-заземлителем (15), а второй полюс генератора заземляется вторым якорем-заземлителем (10).
Измеритель дистанции (4) служит для точного определения дистанции от АНПА (1) до ДПУ и его пространственного положения при сближении с ДПУ [2, с. 19].
Работа системы приведения АНПА (1) к ДПУ включает дежурный и рабочий режимы. После установки системы приведения АНПА (1) к ДНУ на морское дно (12) она переводится в дежурный режим и ожидает установленного гидроакустического запросного сигнала от АНПА (1) для начала стыковки. После получения сигнала система переключается в рабочий режим и создает электромагнитный коридор вдоль трассы ведущего кабеля (11), с помощью которого осуществляет проводку АНПА (1) к причальному конусу ДНУ (3), его стыковку и фиксацию в корпусе (5) ДПУ с помощью стопорного устройства (7) и стопора (16) (фиг. 2 и 3). После стыковки АНПА (1) электромагнитный коридор выключается и осуществляется зарядка источника тока (на фиг. не показано) АНПА (1) от электростанции, расположенной в опоре (9). Вновь в дежурный режим система приведения включается после отстыковки АНПА (1) и выхода его из ДПУ.
Действия АНПА (1) для стыковки с ДПУ и подзарядки бортового источника тока включают: прибытие его в заданную точку и подачу запросного сигнала на гидроакустический маяк-ответчик (14) системы приведения АНПА к ДПУ. После получения ответного сигнала от ГАМ-ответчика (14) АНПА (1) с помощью устройства приема сигналов обнаруживает (13) ведущий кабель (11), определяет свое пространственное положение и по командам аппаратуры сближается с причальным конусом ДНУ (3) вдоль трассы ведущего кабеля (11). Возможный снос АНПА (1) течением регулируется приборами управления (на фиг. не показано) АНПА (1) по данным устройства приема сигналов ведущего кабеля (11) путем изменения вектора скорости (2) АНПА.
Техническим результатом изобретения является система приведения АНПА к ДПУ, обеспечивающая в заданном районе без привлечения надводных кораблей и судов надежную и точную стыковку АНПА с ДПУ, необходимую для подзарядки его бортовых источников тока, в том числе в условиях наличия в районе подводных течений.
Таким образом, система приведения АНПА к ДПУ с подсистемой ведущего кабеля, обеспечивает высокую точность пространственного позиционирования АНПА, определяет отклонения его продольной оси от линии ведущего кабеля, возникающие при интенсивных подводных течениях, и помогает приборам управления АНПА эти отклонения устранить. В результате обеспечивается уверенное приведение АНПА к причальному конусу ДПУ в условиях сильных подводных течений, что выгодно отличает ее от прототипа.
Источники информации, использованные при выявлении изобретения и составлении его описания
1. М.П. Колесников, Л.А. Мартынова, И.В. Пашкевич, П.С. Шелест. Метод позиционирования автономного необитаемого подводного аппарата в процессе приведения к причальному устройству. Известия ТулГУ. Технические науки. 2015. Вып. 11. Ч. 2, с. 38-48. https://cyberlenirika.ru/article/n/metod-pozitsionirovaniya-avtonomnogo-neobitaemogo-podvodnogo-apparata-v-protsesse-privedeniva-k-prichalnomu-ustroy stvu/viewer.
2. Илларионов Г.Ю., Щербатюк А.Ф., Кушнерик А.А., Квашнин А.Г. Донные причальные устройства для автономных необитаемых подводных аппаратов. Л.: Двойные технологии №1 (54) 2011. http://pstmprint.ru/wp-content/uploads/2016/04/dt-1-2011-3
3. Маяк. Военно-морской словарь /Гл. ред. В.Н. Чернавин. М.: Воениздат, 1989. - 511 с. С. 240. https://bookree.org/reader?file=723999
4. И.С. Калинский. Навигационное оборудование морских театров. Л.: ВВМКУ им. М.В. Фрунзе, 1980. 428 с.
5. Средства гидроакустические. Термины и определения. ГОСТ 22547-81. М.: Изд-во стандартов, 1981.
6. И.С. Калинский. Навигационное оборудование морских театров. Л.: ВВМКУ им. М.В. Фрунзе, 1980. 428 с. С. 208-210.
7. Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления / Патент на изобретение RU 2710791. М.: ФИПС, 2020. Бюл. №2.



Изобретение относится к области морской техники и предназначено для автономного наведения самоходных подводных аппаратов к донному причальному устройству (ДПУ). Система приведения включает навигационную систему с ведущим кабелем, имеющую два якоря с заземлителями, блок с источником тока, его преобразователем, генератором и аппаратурой приема и излучения гидроакустических сигналов с электронным блоком и усилителем, шифратором и дешифратором, гидроакустические датчики, маяки-ответчики или отметчики. Якорь-заземлитель, гидроакустический датчик, маяк-ответчик или отметчик прикреплены к первому концу ведущего кабеля, ко второму концу ведущего кабеля крепится второй якорь-заземлитель и ДПУ, имеющее причальный конус, измеритель дистанции, корпус причального устройства, Ethernet-антенну, стопорное устройство, аппаратуру управления и опору, с находящейся внутри электростанцией, преобразователем тока и генератором. АНПА имеет устройство приема сигналов ведущего кабеля и Ethernet-антенну. Обеспечивается надежная и точная стыковка АНПА к ДПУ, необходимая для подзарядки. 3 ил.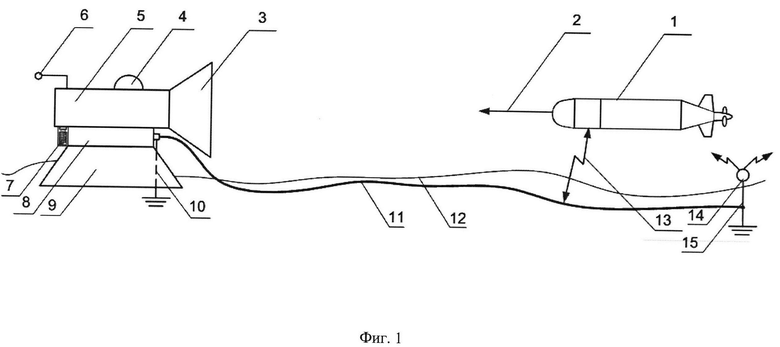
Система приведения автономного необитаемого подводного аппарата к донному причальному устройству, включающая навигационную систему с ведущим кабелем, имеющую два якоря с заземлителями, блок с источником тока, его преобразователем, генератором и аппаратурой приема и излучения гидроакустических сигналов с электронным блоком и усилителем, шифратором и дешифратором, гидроакустические датчики, маяки-ответчики или отметчики, отличающаяся тем, что якорь-заземлитель, гидроакустический датчик, маяк-ответчик или отметчик прикреплены к первому концу ведущего кабеля, ко второму концу ведущего кабеля крепится второй якорь-заземлитель и донное причальное устройство, имеющее причальный конус, измеритель дистанции, корпус причального устройства, Ethernet-антенну, стопорное устройство, аппаратуру управления и опору, с находящейся внутри электростанцией, преобразователем тока и генератором, автономный необитаемый подводный аппарат имеет устройство приема сигналов ведущего кабеля и Ethernet-антенну.
| СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА И САМОХОДНЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2710791C1 |
| Устройство для подводного пуска и приема автономного необитаемого подводного аппарата | 2019 |
|
RU2719491C1 |
| Способ позиционирования подводных аппаратов | 2019 |
|
RU2717161C1 |
| УСТРОЙСТВО ДЛЯ ЗАРЯДКИ АККУМУЛЯТОРНОЙ БАТАРЕИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО ОБЪЕКТА | 2015 |
|
RU2611068C1 |
| WO 2015001377 A1, 08.01.2015 | |||
| WO 2018109451 A1, 21.06.2018. | |||

