Изобретение относится к подводной технике и в частности к технологиям создания средств навигации и управления для глубоководных автономных необитаемых подводных аппаратов (АНПА), способных работать на предельных глубинах мирового океана.
Известен способ навигации и информационной поддержки для сопровождения АНПА с определением текущих координат на его борту и параллельно в пункте управления, размещаемом на борту обеспечивающего судна (ОС), основанный на обработке гидроакустических дальномерных данных АНПА относительно сети донных маяков-ответчиков с использованием судовой гидроакустической навигационной антенны. Способ реализуется в системах, называемых гидроакустическими навигационными системами с длинной базой, и может быть применен для глубоководных аппаратов (Матвиенко Ю.В., Рылов Р.Н., Сидоренко А.В. Гидроакустические средства навигации и телеуправления для автономных необитаемых подводных аппаратов //Подводные технологии, 2005, №1, с.20-27). В составе навигационных сигналов передаются данные телеметрии и телеуправления.
Недостатки этих систем при работе на больших и предельных глубинах:
- необходимость предварительной установки и координирования сети маяков в районе работ, сложность и стоимость этих работ становится значительной при увеличении глубины акватории,
- необходимость применения для АНПА, способных работать на предельных глубинах мирового океана, систем с низкой рабочей частотой, обеспечивающих увеличение дальности их действия, что приводит к росту габаритов гидроакустического оборудования на борту АНПА и снижению скорости информационного обмена между ним и пунктом управления.
Кроме того, в таких внешних гидроакустических навигационных системах не используются текущие данные бортовой автономной навигационной системы аппарата, комплексирование с которыми обеспечивает эффективную фильтрацию гидроакустических данных и повышает точность и надежность навигации.
Известен способ подводной навигации и информационного обмена, основанный на комплексной обработке данных от различных устройств (Агеев М.Д., Киселев Л.В., Матвиенко Ю.В. и др. Автономные подводные роботы.- М., Наука, 2005, 398 с). Способ подводной навигации и информационного обмена включает:
- счисление координат на борту аппарата,
- установку ряда автономных опорных маяков, координаты которых известны на борту аппарата,
- обмен по гидроакустическому каналу связи между маяками и АНПА для формирования гидроакустических дальномерных данных,
- комплексирование бортовых и гидроакустических навигационных данных,
- применение средств двухсторонней гидроакустической связи между АНПА и ОС для информационного обмена с использованием судовой навигационной гидроакустической антенны.
Данный способ позволяет реализовать информационный обмен, увеличить дальность действия и точность навигации за счет комплексирования данных бортовой навигационной системы и внешних гидроакустических навигационных систем.
Недостатком данного способа этих систем при работе на больших и предельных глубинах:
- необходимость применения для АНПА, способных работать на предельных глубинах мирового океана, систем с низкой рабочей частотой, обеспечивающих увеличение дальности их действия, что приводит к росту габаритов гидроакустического оборудования на борту АНПА и снижению скорости информационного обмена между ним и пунктом управления.
Известен также способ подводной навигации (Patent US7139647, МПК G01С 21/00, 21.11.2006 г.).
В соответствии с этим способом для решения навигационной задачи определяют локальные координаты АНПА на его борту, счисленные по данным бортовых датчиков курса, скорости и глубины, затем корректируют накапливающиеся ошибки счисления по дальномерным гидроакустическим данным, принимаемым на борту аппарата. Ошибка счисления корректируется путем определения положения объекта по измеряемым дальностям от комплекта маяков, предварительно установленным в районе работ. Причем координаты маяков могут быть известны перед началом работ на борту подводного аппарата или передаваться от маяков по гидроакустической линии связи. Работа систем возможна также при наличии только одного опорного маяка (А. Scherbatjuk. The AUV Positining using Ranges from one Transponder LBL - OCEANS 95, vol.3, р.1620-1623) с измерением дальности до маяка из ряда точек специальной траектории аппарата, которую он выполняет для решения навигационной задачи путем накопления траекторных дальномерных данных. Ключевой особенностью, обеспечивающей необходимую точность одномаяковой навигации, является определение координат стартовой точки миссии АНПА на рабочей глубине. Эти координаты могут быть установлены при удержании АНПА в одной точке в течение времени необходимого для накопления дальномерных данных от судовой антенны, полученных в результате специальных маневров ОС для реализации известных методик определения координат стационарного источника навигационных сигналов (патент РФ № 2378663, Способ определения горизонтальных координат неподвижного подводного источника навигационных сигналов, МПК G01S 15/06, опубл. 10.01.2010 г.). Информационная поддержка миссии обеспечивается средствами гидроакустической системы связи между АНПА и судовой навигационной антенной, дальность действия которой устанавливается максимальным удалением АНПА от ОС.
Этот способ подводной навигации АНПА по своему функциональному назначению, по своей технической сущности и достигаемому техническому результату наиболее близок к заявляемому техническому решению и принят за прототип.
Недостатками известного способа являются:
резкий рост габаритов гидроакустического оборудования, размещаемого на АНПА, для информационного обмена с маяками и судном, при увеличения дальности действия систем навигации за счет понижения рабочих частот системы, поскольку необходимо обеспечить прямую двухстороннюю связь АНПА и ОС, а район работы АНПА привязан к зоне действия опорных маяков, дальность до которых определяется выбранным частотным диапазоном гидроакустического канала связи (Р.Д. Урик, Основы гидроакустики.- Л., Судостроение, 1978, с.424),
уменьшение точности навигации и уменьшение скорости информационного обмена за счет применения низкой несущей частоты в гидроакустическом канале информационного обмена,
- значительное время для координирования стартовой точки миссии АНПА при работе с одиночным маяком,
зависимость точности, дальности действия и скорости информационного обмена от условий распространения акустических сигналов по сложным траекториям. Например, по трассе АНПА - судно, при значительном горизонтальном удалении аппарата от судна в условиях глубоководного погружения и движения АНПА, в силу рефракции формируется очень сложная картина звукового поля с формированием зон тени, что приводит к потере связи, а оценки структуры этих зон, при неточном или недостоверном знании гидрологии по всей глубине акватории, оказываются неприемлемыми.
Задачей настоящего изобретения является обеспечение навигационно-информационной поддержки АНПА способного работать на максимальных глубинах мирового океана, и уменьшение массогабаритных характеристик и энергопотребления гидроакустического оборудования, размещаемого на борту такого АНПА, и предназначенного для решения задач навигации и информационного обмена с пунктом управления, размещенном на борту обеспечивающего судна.
Задача решается тем, что в способе навигационно-информационной поддержки глубоководного автономного необитаемого подводного аппарата, при котором устанавливают в районе работ на дне один стационарный донный гидроакустический маяк и определяют его географические координаты, выставляют с борта обеспечивающего судна (ОС) навигационную гидроакустическую антенну со средствами гидроакустической связи с АНПА и стационарным донным маяком устанавливают координаты точки старта АНПА, определяют текущее положение АНПА бортовой автономной навигационной системой счисления, корректируют ошибки счисления на основании расчета координат АНПА по серии дальномерных данных от стационарного донного маяка, выполняют передачу на него команд управления и прием от него данных телеметрии из пункта управления, размещаемого на борту ОС, дополнительно стационарный донный маяк оснащают низкочастотными (НЧ) приемо- передающими средствами гидроакустической связи с ОС и АНПА, а также высокочастотными (ВЧ) приемо-передающими средствами гидроакустической связи с АНПА, оснащают АНПА высокочастотными приемо-передающими средствами гидроакустической связи и низкочастотными приемными средствами гидроакустической связи, АНПА оснащают программными средствами для его бортовой системы управления, реализующими выход АНПА к стационарному донному маяку на основании приема и обработки данных, принятых от стационарного донного маяка по гидроакустической связи в низкочастотном диапазоне, стационарный донный маяк размещают вблизи центра предполагаемого района работ, устанавливают координаты стартовой точки АНПА путем их расчета по дальномерным данным стационарного донного маяка на основании приема и обработки данных, принятых от него в ВЧ диапазоне гидроакустической связи, обеспечивают прием команд управления на борту АНПА от ОС путем приема и обработки данных, переданных от ОС в НЧ диапазоне и ретранслированных стационарным донным маяком в ВЧ диапазоне гидроакустической связи, обеспечивают передачу данных телеметрии с борта АНПА путем приема и обработки данных, принятых стационарным донным маяком в ВЧ диапазоне и ретранслированных на ОС в НЧ диапазоне гидроакустической связи.
Значения рабочих частот гидроакустических средств информационного обмена в НЧ диапазоне выбирают из условия максимального удаления ОС от стационарного донного маяка, а значения рабочих частот гидроакустических средств информационного обмена в ВЧ диапазоне выбирают из условия заданного максимального удаления АНПА от стационарного донного маяка необходимой скорости передачи данных.
Новые операции могут быть также расширены тем, что значения рабочих частот гидроакустических средств информационного обмена в низкочастотном диапазоне выбирают из условия максимального удаления ОС от донного маяка, а значения рабочих частот гидроакустических средств информационного обмена в высокочастотном диапазоне выбирают из условия заданного максимального удаления АНПА от донного маяка.
Сопоставительный анализ заявляемого технического решения и прототипа показывает, что первое в отличие от прототипа имеет следующие существенные признаки: донный маяк оснащают НЧ приемо-передающими средствами гидроакустической связи с судном носителем и АНПА, а также ВЧ приемопередающими средствами гидроакустической связи с АНПА,
АНПА оснащают ВЧ приемо-передающими средствами гидроакустической связи и НЧ приемными средствами гидроакустической связи,
- АНПА оснащают программными средствами для его бортовой системы управления, реализующими выход АНПА к стационарному донному маяку на основании приема и обработки данных, принятых от стационарного донного маяка по гидроакустической связи в НЧ диапазоне,
- донный маяк размещают вблизи центра предполагаемого района работ,
- обеспечивают установку координат стартовой точки АНПА путем их расчета по дальномерным данным донного маяка на основании приема и обработки данных, принятых от него в ВЧ диапазоне гидроакустической связи,
- обеспечивают прием команд управления на борту АНПА от ОС путем приема и обработки данных, переданных от ОС в вертикальном гидроакустическом канале в НЧ диапазоне и ретранслированных донным маяком в ВЧ диапазоне гидроакустической связи,
- обеспечивают передачу данных телеметрии с борта АНПА путем приема и обработки данных, принятых донным маяком в ВЧ диапазоне и ретранслированных на ОС в вертикальном гидроакустическом канале в НЧ диапазоне гидроакустической связи.
В заявленном способе навигационно-информационной поддержки глубоководного автономного необитаемого подводного аппарата с использованием бортовой навигационной системы и гидроакустических средств навигации и связи, и обеспечивающий определение координат и контроль положения движущегося АНПА, а также передачу на него команд управления и прием от него данных телеметрии:
- навигационная и информационная поддержка с борта ОС глубоководного АНПА, выполняющего придонную миссию, обеспечивается гидроакустическими средствами с использованием донного маяка как ретранслятора, при котором АНПА связан с маяком в ВЧ диапазоне по горизонтальному каналу распространения акустических сигналов, а донный маяк с ОС - в НЧ диапазоне по вертикальному каналу распространения акустических сигналов,
- габариты и энергопотребление гидроакустического навигационного оборудования АНПА минимальны за счет отсутствия на его борту аппаратуры передачи НЧ диапазона гидроакустической связи,
- увеличение точности достигается за счет применения ВЧ канала для измерения текущей дальности АНПА от стационарного донного маяка,
- определение координат стартовой точки миссии АНПА выполняется путем его выхода на стационарный донный маяк с установленными координатами,
- зона поисковых и исследовательских работ миссии АНПА планируется в виде круга, в центре которого размещен стационарный донный маяк, с радиусом равным дальности действия ВЧ и НЧ системы связи,
- повышение надежности гидроакустической связи в низкочастотном диапазоне между судном и маяком достигается за счет расположения судна над стационарным маяком в радиусе 1-2 км.
Путем применения для навигации АНПА и информационного обмена между ним и пунктом управления, размещаемом на борту ОС, одного стационарного донного маяка, содержащего крупногабаритную аппаратуру НЧ двухсторонней гидроакустической связи с большой дальностью действия и малогабаритную аппаратуру ВЧ двухсторонней гидроакустической связи, при этом на АНПА размещают малогабаритную аппаратуру ВЧ двухсторонней гидроакустической связи и малогабаритную аппаратуру приемного канала НЧ гидроакустической связи, а с борта ОС выставляется судовая гидроакустическая навигационная антенна с аппаратурой НЧ двухсторонней гидроакустической связи.
Технический результат - обеспечение навигационно-информационной поддержки АНПА способного работать на максимальных глубинах мирового океана, и уменьшение массогабаритных характеристик и энергопотребления на борту АНПА, достигается за счет одного стационарного донного маяка с аппаратурой двухчастотной гидроакустической связи и отсутствия на борту АНПА крупногабаритной аппаратуры передачи низкочастотной гидроакустической связи.
Совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигаемым техническим результатом. На основании изложенного можно заключить, что заявленное техническое решение является новым и обладает изобретательским уровнем, т.к. явным образом не следует из уровня техники и пригодно для промышленного применения.
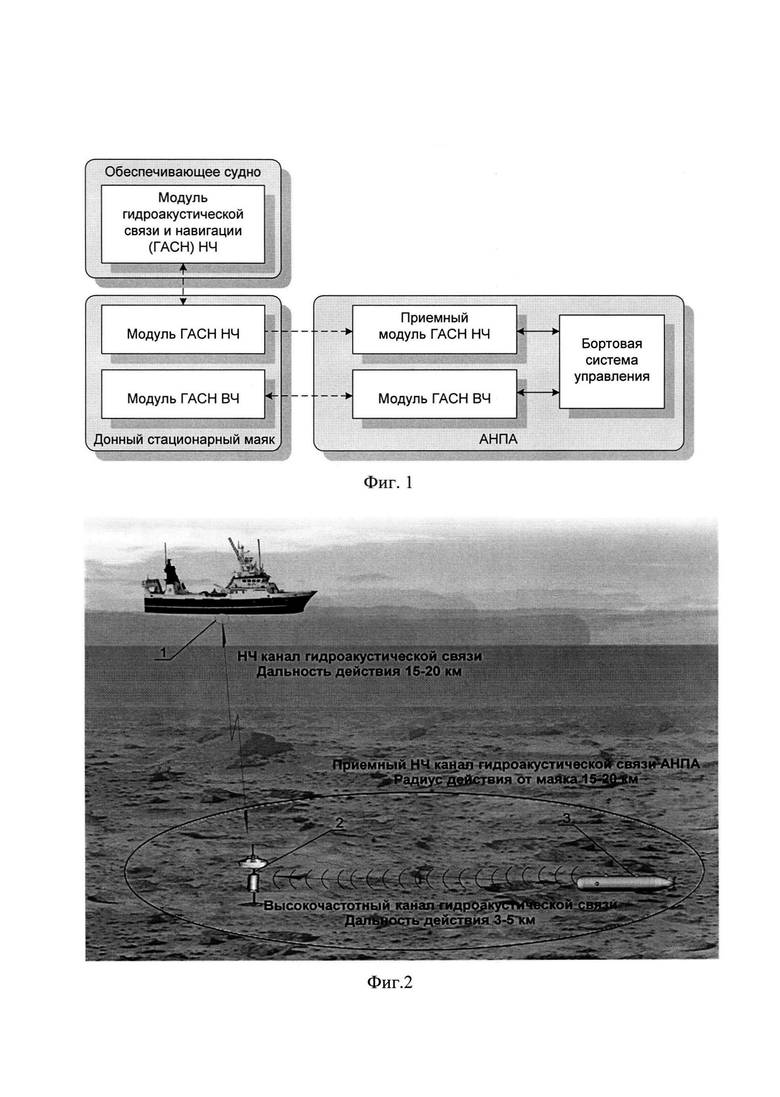
Сущность изобретения поясняется чертежами, где на фиг.1 изображена структурная схема реализации предложенного способа навигационно-информационной поддержки глубоководного автономного необитаемого подводного аппарата с распределением оборудования на борту ОС, подводного аппарата и донного стационарного маяка, на фиг.2 - каналы ВЧ и НЧ гидроакустической связи.
На чертежах приняты следующие обозначения:
1 - обеспечивающее судно с аппаратурой ГАНС НЧ
2 - донный стационарный маяк с аппаратурой ГАНС НЧ и ВЧ
3 - АНПА с аппаратурой ГАНС ВЧ и приемником ГАНС НЧ.
Способ реализуется следующим образом. Обеспечивающее судно 1 прибывает в район исследований. При выполнении глубоководных работ в районе исследований выставляется донный стационарный маяк 2, обладающий низкочастотным каналом связи с большой дальностью (ориентировочно вдвое большей, чем глубина установки маяка) и производится его координирование по известным методикам. Далее выполняется пуск АНПА 3 на рабочую глубину. При погружении на борту АНПА ведется прием данных от донного маяка 2 по низкочастотному каналу связи с определением текущей дальности. При достижении определенной глубины, (например равной 0,9 от глубины района) бортовыми средствами управления АНПА выполняется процедура выхода на донный маяк по дальномерным данным низкочастотной гидроакустической связи (А.М. Павин, Автоматическое приведение автономного подводного робота к гидроакустическому маяку - /Подводные исследования и робототехника, 2008, №1(5), с 32-38).
Дальномерные измерения по низкочастотному каналу связи в финальной части выхода на донный маяк 2 (на дальностях первые сотни метров и меньше) дублируются дальномерными данными высокочастотной гидроакустической связи, что позволяет выйти к донному маяку с минимальной (первые единицы метров) ошибкой для формирования координат стартовой точки. Далее стартует миссия АНПА на рабочей глубине вблизи дна. Миссия сопровождается информационным обменом между донным маяком и АНПА по высокочастотному каналу связи с измерением текущей дальности АНПА от донного маяка. Выполняется расчет координат по счислению. Эти данные корректируются по дальномерным данным от донного маяка. Условия распространения сигналов в горизонтальной плоскости, где размещены донный маяк и АНПА, в глубоководных миссиях соответствуют практически однородной среде с минимальным градиентом скорости звука (Р. Д. Урик. Основы гидроакустики.- Л., Судостроение, 1978, с. 146). Это обстоятельство улучшает точность измерения дальности и упрощает организацию достоверного информационного обмена между АНПА и донным маяком. Данные навигации и телеметрии, сформированные на борту АНПА и переданные по высокочастотному каналу на донный маяк, далее ретранслируются донным маяком по низкочастотной гидроакустической связи на борт обеспечивающего судна 1, которое в режиме поддержки выполняемой миссии позиционируется над донным маяком, с использованием вертикального канала распространения акустических сигналов. Для глубоководных работ оптимальная частота низкочастотной (НЧ) системы связи с дальностью до 20 км может составить около 5-7 кГц, а диаметр эффективно работающих ненаправленных передающих антенн составит до полуметра при массе несколько десятков кг и энергопотреблении более одного кВт. Размещение оборудования с такими габаритными и энергетическими характеристиками на АНПА ведет к уменьшению его автономности. В настоящем же техническом решении на борту АНПА размещается только малогабаритная и потребляющая мало электроэнергии приемная аппаратура этой системы связи, что увеличивает автономность АНПА. Высокочастотная (ВЧ) система связи может иметь несущую частоту 30-40 кГц. В этом диапазоне обеспечиваются необходимые характеристики по точности при удалении АНПА от донного маяка до 3-5 км, при минимальных габаритах и энергопотреблении аппаратуры.
Способ разработан в Институте проблем морских технологий и предлагается для навигации глубоководных автономных необитаемых подводных аппаратов (Матвиенко Ю.В., Киселев Л.В., Инзарцев А.В., Львов О.Ю. О проекте создания подводного робототехнического комплекса для исследования предельных глубин океана - /Подводные исследования и робототехника, 2016, №2(22), с 4-12.).
Изобретение относится к подводной технике и в частности к технологиям создания средств навигации и управления для глубоководных автономных необитаемых подводных аппаратов (АНПА), способных работать на предельных глубинах мирового океана. В способе навигационно-информационной поддержки глубоководного автономного необитаемого подводного аппарата стационарный донный маяк оснащают низкочастотными (НЧ) приемо-передающими средствами гидроакустической связи с ОС и АНПА, а также высокочастотными (ВЧ) приемо-передающими средствами гидроакустической связи с АНПА. Оснащают АНПА высокочастотными приемо-передающими средствами гидроакустической связи и низкочастотными приемными средствами гидроакустической связи, а также оснащают программными средствами для его бортовой системы управления, реализующими выход АНПА к стационарному донному маяку на основании приема и обработки данных, принятых от стационарного донного маяка по гидроакустической связи в низкочастотном диапазоне. После чего стационарный донный маяк размещают вблизи центра предполагаемого района работ. Устанавливают координаты стартовой точки АНПА путем их расчета по дальномерным данным стационарного донного маяка на основании приема и обработки данных, принятых от него в ВЧ-диапазоне гидроакустической связи. Обеспечивают прием команд управления на борту АНПА от ОС путем приема и обработки данных, переданных от ОС в НЧ-диапазоне и ретранслированных стационарным донным маяком в ВЧ-диапазоне гидроакустической связи. Обеспечивают передачу данных телеметрии с борта АНПА путем приема и обработки данных, принятых стационарным донным маяком в ВЧ-диапазоне и ретранслированных на ОС в НЧ-диапазоне гидроакустической связи. Значения рабочих частот гидроакустических средств информационного обмена в НЧ-диапазоне выбирают из условия максимального удаления ОС от стационарного донного маяка, а значения рабочих частот гидроакустических средств информационного обмена в ВЧ-диапазоне выбирают из условия заданного максимального удаления АНПА от стационарного донного маяка необходимой скорости передачи данных. Технический результат - обеспечение навигационно-информационной поддержки АНПА, способного работать на максимальных глубинах мирового океана, и уменьшение массогабаритных характеристик и энергопотребления на борту АНПА. 1 з.п. ф-лы, 2 ил.
1. Способ навигационно-информационной поддержки глубоководного автономного необитаемого подводного аппарата, при котором устанавливают в районе работ на дне один стационарный донный гидроакустический маяк и определяют его географические координаты, выставляют с борта обеспечивающего судна (ОС) навигационную гидроакустическую антенну со средствами гидроакустической связи с АНПА и стационарным донным маяком, устанавливают координаты точки старта АНПА, определяют текущее положение АНПА бортовой автономной навигационной системой счисления, корректируют ошибки счисления на основании расчета координат АНПА по серии дальномерных данных от стационарного донного маяка, выполняют передачу на него команд управления и прием от него данных телеметрии из пункта управления, размещаемого на борту ОС, отличающийся тем, что дополнительно стационарный донный маяк оснащают низкочастотными (НЧ) приемо-передающими средствами гидроакустической связи с ОС и АНПА, а также высокочастотными (ВЧ) приемо-передающими средствами гидроакустической связи с АНПА, оснащают АНПА высокочастотными приемо-передающими средствами гидроакустической связи и низкочастотными приемными средствами гидроакустической связи, АНПА оснащают программными средствами для его бортовой системы управления, реализующими выход АНПА к стационарному донному маяку на основании приема и обработки данных, принятых от стационарного донного маяка по гидроакустической связи в низкочастотном диапазоне, стационарный донный маяк размещают вблизи центра предполагаемого района работ, устанавливают координаты стартовой точки АНПА путем их расчета по дальномерным данным стационарного донного маяка на основании приема и обработки данных, принятых от него в ВЧ-диапазоне гидроакустической связи, обеспечивают прием команд управления на борту АНПА от ОС путем приема и обработки данных, переданных от ОС в НЧ-диапазоне и ретранслированных стационарным донным маяком в ВЧ-диапазоне гидроакустической связи, обеспечивают передачу данных телеметрии с борта АНПА путем приема и обработки данных, принятых стационарным донным маяком в ВЧ-диапазоне и ретранслированных на ОС в НЧ-диапазоне гидроакустической связи.
2. Способ по п. 1, отличающийся тем, что значения рабочих частот гидроакустических средств информационного обмена в НЧ-диапазоне выбирают из условия максимального удаления ОС от стационарного донного маяка, а значения рабочих частот гидроакустических средств информационного обмена в ВЧ-диапазоне выбирают из условия заданного максимального удаления АНПА от стационарного донного маяка необходимой скорости передачи данных.
| СПОСОБ ОПРЕДЕЛЕНИЯ ГОРИЗОНТАЛЬНЫХ КООРДИНАТ НЕПОДВИЖНОГО ПОДВОДНОГО ИСТОЧНИКА ГИДРОАКУСТИЧЕСКИХ НАВИГАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2378663C1 |
| СПОСОБ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2563332C2 |
| СПОСОБ НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ АВТОНОМНОГО ПОДВОДНОГО РОБОТА, КОНТРОЛИРУЕМОГО С БОРТА ОБЕСПЕЧИВАЮЩЕГО СУДНА | 2007 |
|
RU2344435C1 |
| Способ приведения автономного необитаемого подводного аппарата | 2016 |
|
RU2616446C1 |
| US 7139647 B2, 21.11.2006. | |||

