Изобретение относится к грузоподъемным устройствам, а именно к манипуляторам и может быть использовано для перемещения обрабатывающих органов и предмета труда на лесосечных работах, складах, в строительстве.
Известен манипулятор, включающий опорно-поворотное устройство с колонной, на которой шарнирно установлена шарнирно сочлененная двухсекционная стрела с главным (корневым) звеном, его приводом, и конечной телескопической секцией, снабженной приводом и рабочим органом (захватно-срезающее устройство, харвестерная головка, грейфер). В качестве приводов могут быть использованы, например, силовые гидроцилиндры. Телескопическая секция имеет неподвижную часть в виде полого корпуса и подвижные части, где неподвижная и подвижные части снабженные кронштейнами. Подвижные части выполнены в виде полых корпусов, а последняя подвижная часть представляет собой грузонесущую балку, к концу которой закреплен рабочий орган. Количество подвижных частей зависит от назначения манипулятора и его максимальной величины вылета. Привод подвижных частей и телескопической секции, выполненный в виде трособлочной системы, включающий полиспаст, блоки которого смонтированы на противоположных концах второго силового цилиндра, и трос, один конец которого соединен с одной из осей блоков полиспаста, а другой – с подвижными частями телескопической секции. Другой конец троса после полиспаста пропущен через отверстия в кронштейнах, жестко закрепленных на неподвижной и подвижных частях телескопической секции, и закреплен на конце последней подвижной части телескопической секции. На каждой подвижной части телескопической секции между кронштейнами установлены пружины сжатия (см. Пат. № 2312056, М. кл. B66 С23/00, 02.05.2006).
Недостатками данного манипулятора являются: малый рабочий ход подвижных частей, увеличивающий габарит в транспортном положении, низкая надежность.
Задача, на решение которой направлено изобретение – увеличение рабочего хода подвижных частей для уменьшения габарита манипулятора в транспортном положении, повышение надежности.
Для решения этой задачи в манипуляторе, содержащем опорно-поворотное устройство с колонной, на которой шарнирно установлена шарнирно сочлененная двухсекционная стрела с главным (корневым) звеном, его приводом в виде гидроцилиндра, и конечной телескопической секцией, снабженной приводом в виде гидроцилиндра и рабочим органом, телескопическая секция имеет неподвижную часть в виде полого корпуса и подвижные части, где неподвижная и подвижные части снабжены кронштейнами, подвижные части выполнены в виде полых корпусов, а последняя подвижная часть представляет собой грузонесущую балку, к концу которой закреплен рабочий орган, согласно изобретению, подвижные части, кроме последней, выполнены в виде двух полых корпусов, где в каждом корпусе в нижней полости установлена последующая подвижная часть, а в верхней полости – привод последующей подвижной части, представляющий собой гидроцилиндр, жестко закрепленный к внутреннему и внешнему кронштейнам, находящимся соответственно внутри верхней полости и на конце последующей подвижной части, при этом первая подвижная часть находится в неподвижной части и приводится в движение гидроцилиндром, жестко закрепленным за кронштейны, один из которых установлен на конце неподвижной части, а другой – на конце подвижной.
Выполнение в манипуляторе подвижных частей, кроме последней, в виде двух полых корпусов, где в каждом корпусе в нижней полости установлена последующая подвижная часть, а в верхней полости – привод последующей подвижной части, представляющий собой гидроцилиндр, жестко закрепленный к внутреннему и внешнему кронштейнам, находящимся соответственно внутри верхней полости и на конце последующей подвижной части, при этом первая подвижная часть находится в неподвижной части и приводится в движение гидроцилиндром, жестко закрепленным за кронштейны, один из которых установлен на конце неподвижной части, а другой – на конце подвижной, дает возможность исключить из конструкции пружины сжатия между кронштейнами, которые при полном сжатии блокируют втягивание подвижных частей на всю длину, а следовательно, рабочий ход подвижных частей увеличивается, уменьшая габарит манипулятора в транспортном положении. Использование гидроцилиндров в качестве привода подвижных частей манипулятора позволяет отказаться от пружин сжатия и трособлочной системы, которые при эксплуатации в сложных природно-производственных условиях быстро изнашиваются, а особенность расположения гидроцилиндров увеличивает сопротивление телескопической секции при воздействии на нее изгибающих моментов, что в совокупности повышает надежность манипулятора.
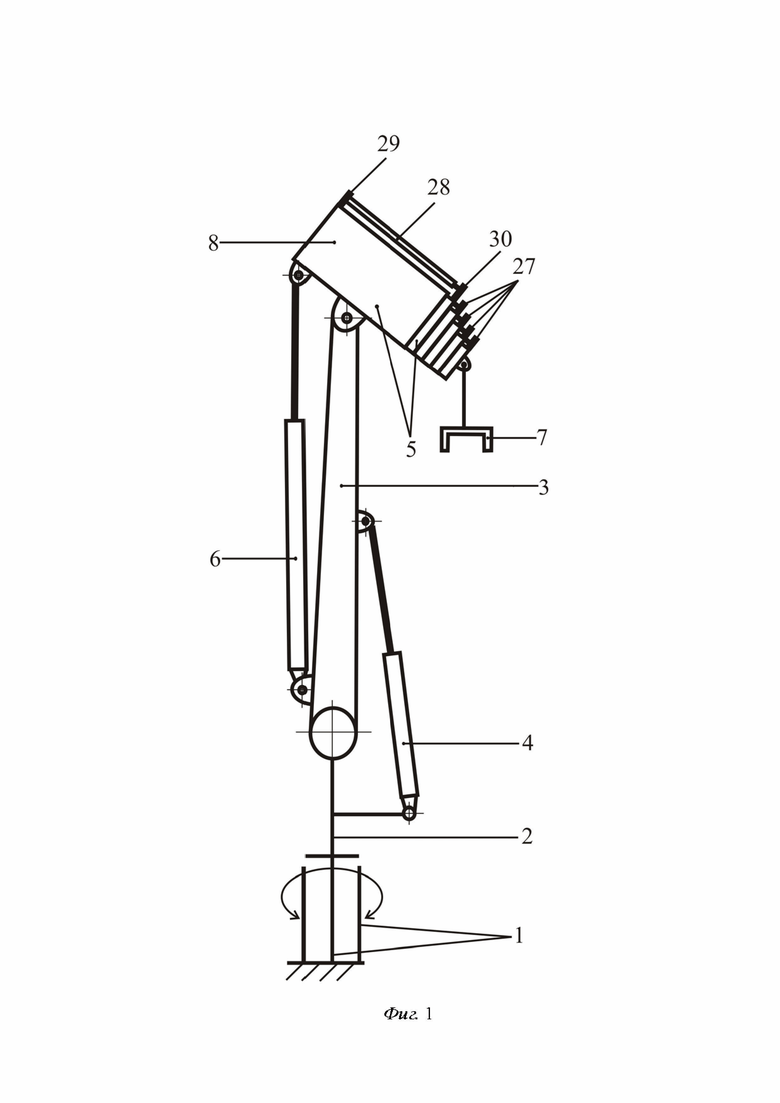
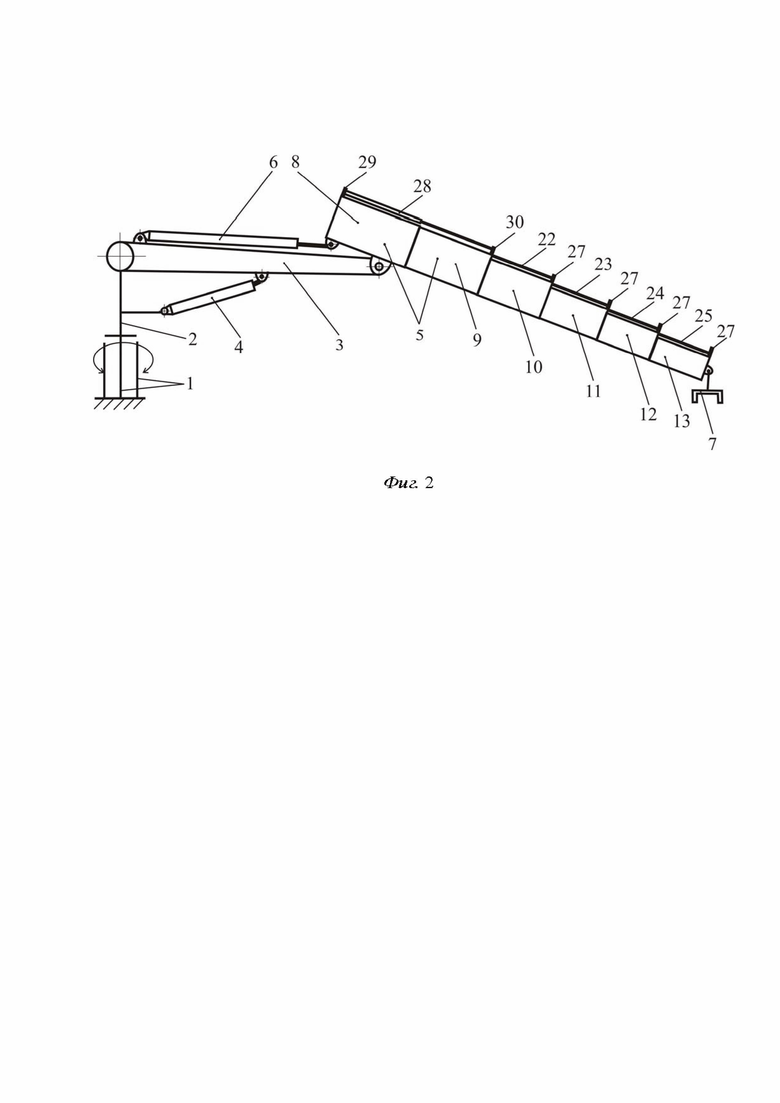
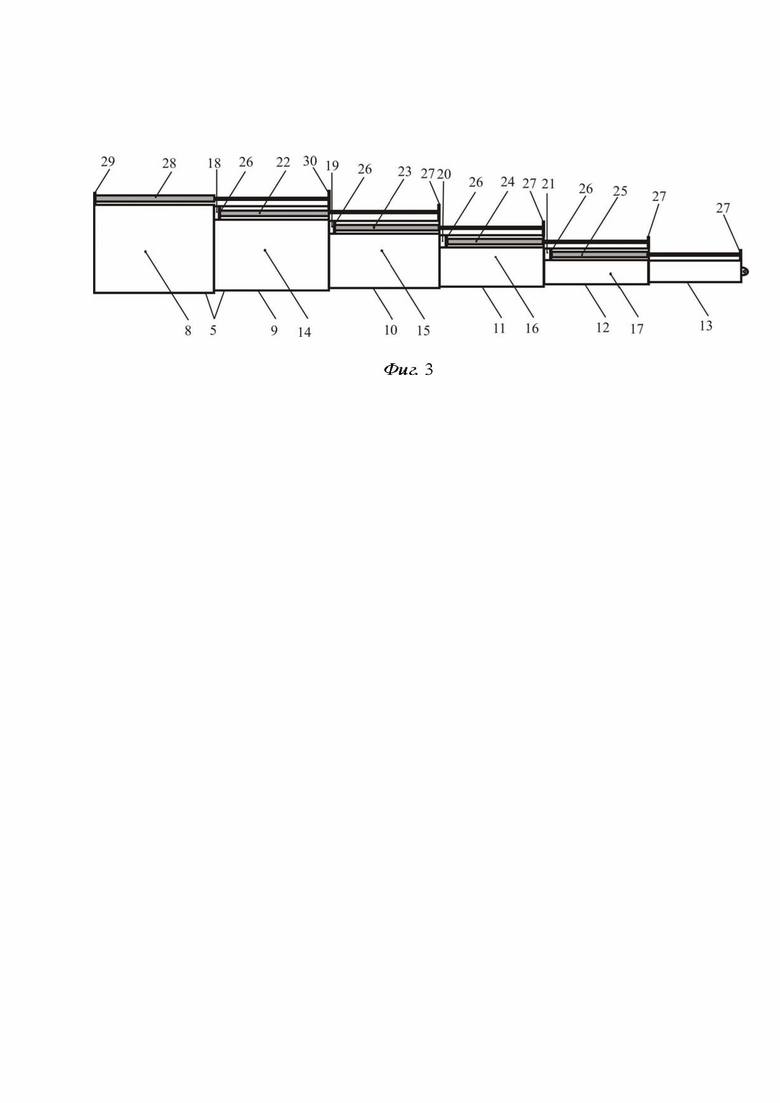
На фиг. 1 изображен манипулятор при минимальном вылете, вид сбоку; на фиг. 2 – то же при максимальном вылете, вид сбоку; на фиг. 3 – телескопическая секция в разрезе, вид с боку.
Манипулятор включает опорно-поворотное устройство 1 с колонной 2, на которой шарнирно установлена шарнирно сочлененная двухсекционная стрела с главным (корневым) звеном 3, его приводом в виде гидроцилиндра 4, и конечной телескопической секцией 5, снабженной приводом в виде гидроцилиндра 6 и рабочим органом 7. Телескопическая секция 5 имеет неподвижную часть 8 в виде полого корпуса и подвижные части 9, 10, 11, 12, 13. Подвижные части 9, 10, 11, 12 выполнены в виде двух полых корпусов, а последняя подвижная часть 13 представляет собой грузонесущую балку, к концу которой закреплен рабочий орган 7. Количество подвижных частей зависит от назначения манипулятора и его максимальной величины вылета. В подвижных частях 9, 10, 11, 12 в нижних полостях 14, 15, 16, 17 установлены соответственно подвижные части 10, 11, 12, 13, а в верхних полостях 18, 19, 20, 21 – их приводы 22, 23, 24, 25, представляющие собой гидроцилиндры, жестко закрепленные к внутреннему 26 и внешнему 27 кронштейнам, находящимся соответственно внутри верхних полостей 18, 19, 20, 21 и на концах подвижных частей 10, 11, 12, 13. Первая подвижная часть 9 находится в неподвижной части 8 и приводится в движение гидроцилиндром 28, жестко закрепленным за кронштейны 29 и 30, один из которых установлен на конце неподвижной части 8, а другой – на конце подвижной части 9.
Манипулятор работает следующим образом. На технологической стоянке оператор посредством гидроцилиндров 4, 6 и опорно-поворотного устройства 1, выводит манипулятор из транспортного положения. Затем оператор приводит телескопическую секцию 5 в рабочее состояние, с помощью гидроцилиндров 22, 23, 24, 25, 28, которые выдвигают подвижные части 9, 10, 11, 12, 13 с рабочим органом 7 из неподвижной части 8, и направляет на предмет труда, одновременно контролируя наклон манипулятора и угол отклонения от оси базового шасси, используя гидроцилиндры 4, 6 и опорно-поворотное устройство 1. Выдвижение подвижных частей 9, 10, 11, 12, 13 из неподвижной 8, и наведение рабочего органа 7 на предмет труда могут выдвигаться совместно при одновременном включении гидроцилиндров 22, 23, 24, 25, 28 или последовательно. Выполняя работу по обработке предмета труда, при необходимости можно изменить вылет манипулятора и угол направления, задействовав гидроцилиндры 4, 6, 22, 23, 24, 25, 28 и опорно-поворотное устройство 1. Осуществив все работы по обработке предмета труда, оператор выбирает следующий предмет труда и направляет на него рабочий орган 7, где последовательность работ по обработке предмета труда повторяется. По окончании работы на технологической стоянке, оператор гидроцилиндрами 22, 23, 24, 25, 28 приводит в нерабочее состояние телескопическую секцию 5, а гидроцилиндрами 4, 6 и опорно-поворотным устройством 1 устанавливает манипулятор в транспортное положение для перемещения на следующую технологическую стоянку.
Применение манипулятора предложенной конструкции позволит повысить его надежность при эксплуатации в сложных природно-производственных условиях, а также уменьшить габарит в транспортном положении.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 2006 |
|
RU2312056C1 |
| СТРЕЛОВОЕ УСТРОЙСТВО ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2001 |
|
RU2191740C1 |
| МАНИПУЛЯТОР | 2007 |
|
RU2345947C1 |
| Манипулятор | 1989 |
|
SU1768497A1 |
| ИНЖЕНЕРНАЯ ГУСЕНИЧНАЯ МАШИНА НА БАЗОВОМ ТАНКОВОМ ШАССИ | 2004 |
|
RU2283467C1 |
| ГИДРАВЛИЧЕСКИЙ КРАН-МАНИПУЛЯТОР | 2001 |
|
RU2193518C1 |
| Манипулятор лесной машины | 2024 |
|
RU2831151C1 |
| Манипулятор | 2024 |
|
RU2833644C1 |
| ГРУЗОПОДЪЁМНАЯ СТРЕЛА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2240973C2 |
| Подвесной шахтный манипулятор | 1988 |
|
SU1580019A1 |
Изобретение относится к грузоподъемным устройствам, а именно к манипуляторам, и может быть использовано для перемещения обрабатывающих органов и предмета труда на лесосечных работах, складах, в строительстве. Манипулятор включает опорно-поворотное устройство с колонной, на которой шарнирно установлена шарнирно сочлененная двухсекционная стрела с главным (корневым) звеном, его приводом в виде гидроцилиндра, и конечной телескопической секцией, снабженной приводом в виде гидроцилиндра и рабочим органом. Телескопическая секция имеет неподвижную часть в виде полого корпуса и подвижные части. Количество подвижных частей зависит от назначения манипулятора и его максимальной величины вылета. Подвижные части выполнены в виде двух полых корпусов, а последняя подвижная часть представляет собой грузонесущую балку, к концу которой закреплен рабочий орган. Подвижные части, кроме последней, выполнены в виде двух полых корпусов. В каждом корпусе в нижней полости установлена последующая подвижная часть, а в верхней полости – привод последующей подвижной части, представляющий собой гидроцилиндр, жестко закрепленный к внутреннему и внешнему кронштейнам, находящимся соответственно внутри верхней полости и на конце последующей подвижной части. Первая подвижная часть находится в неподвижной части и приводится в движение гидроцилиндром, жестко закрепленным за кронштейны, один из которых установлен на конце неподвижной части, а другой – на конце подвижной части. Достигается увеличение рабочего хода подвижных частей для уменьшения габарита манипулятора в транспортном положении, повышение надежности. 3 ил.
Манипулятор, содержащий опорно-поворотное устройство с колонной, на которой шарнирно установлена шарнирно сочлененная двухсекционная стрела с главным (корневым) звеном, его приводом в виде гидроцилиндра, и конечной телескопической секцией, снабженной приводом в виде гидроцилиндра и рабочим органом, телескопическая секция имеет неподвижную часть в виде полого корпуса и подвижные части, где неподвижная и подвижные части снабжены кронштейнами, подвижные части выполнены в виде полых корпусов, а последняя подвижная часть представляет собой грузонесущую балку, к концу которой закреплен рабочий орган, отличающийся тем, что подвижные части, кроме последней, выполнены в виде двух полых корпусов, где в каждом корпусе в нижней полости установлена последующая подвижная часть, а в верхней полости – привод последующей подвижной части, представляющий собой гидроцилиндр, жестко закрепленный к внутреннему и внешнему кронштейнам, находящимся соответственно внутри верхней полости и на конце последующей подвижной части, при этом первая подвижная часть находится в неподвижной части и приводится в движение гидроцилиндром, жестко закрепленным за кронштейны, один из которых установлен на конце неподвижной части, а другой – на конце подвижной.
| EP 4164980 A1, 19.04.2023 | |||
| ГРУЗОПОДЪЕМНАЯ СТРЕЛА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 1999 |
|
RU2169694C2 |
| Бортовая антенна для беспилотных летательных аппаратов с использованием метаматериала | 2023 |
|
RU2807420C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2312056C1 |
