1
(21)4666318/11
(22) 27.03.89
(46) 15.10.92. Бюл. №38
(71)Марийский политехнический институт им. A.M. Горького
(72)Я.И. Шестаков, В.Б. Неклюдов и В.М. Моков
(56)Авторское свидетельство СССР № 544606, кл. В 66 С 23/04, 1970. (54) МАНИПУЛЯТОР
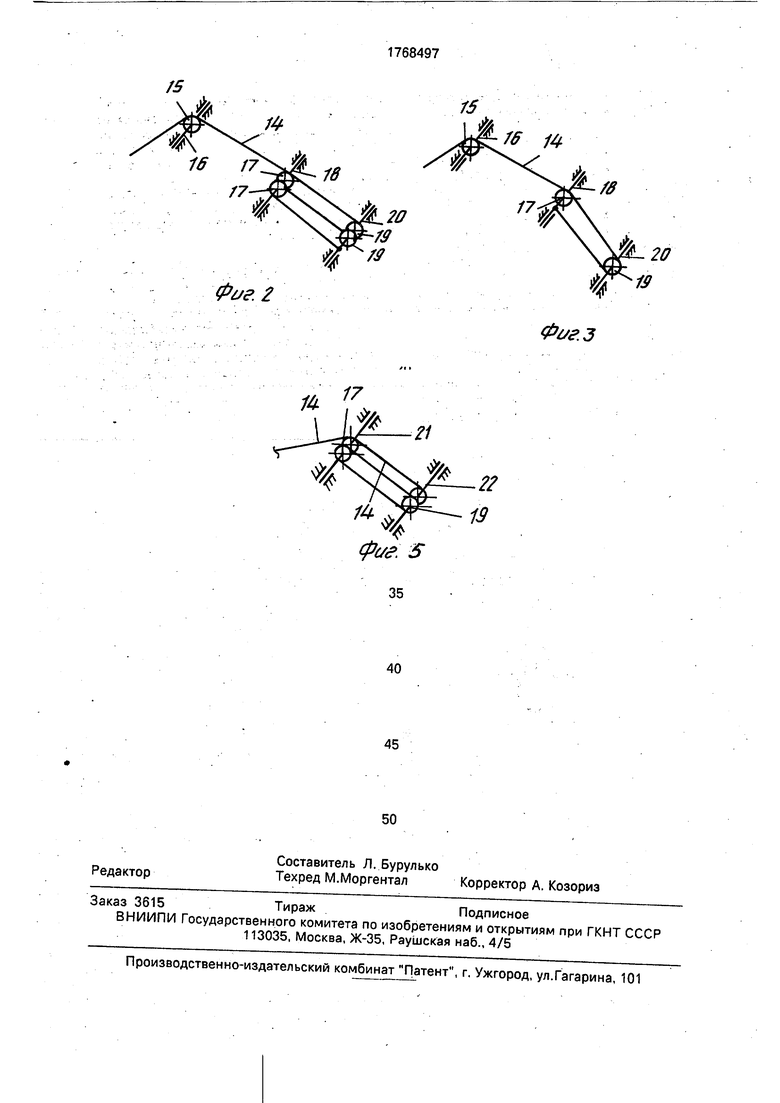
(57)Использование: грузоподъемное оборудование. Сущность: для перемещения подвижной части 10 телескопической секции 5
рычаг 11 шарнирно соединен с неподвижной частью 9 секции бис рычагом 12, который шарнирно соединен с подвижной частью 10. Рычаг 11 связан с неподвижной частью 9 пружиной 13. На рычаге 11 закреплен один конец троса 14, который пропущен через блок 15, закрепленный на оси 16 шарнира соединения секций 3 и 5, через блоки 17, закрепленные на оси 18, и через блоки 19, закрепленные на оси 20, причем другой конец троса 14 в зависимости от кратности полиспаста соединен с осью 18 или 20. 1 з.п.ф-лы, 5 ил.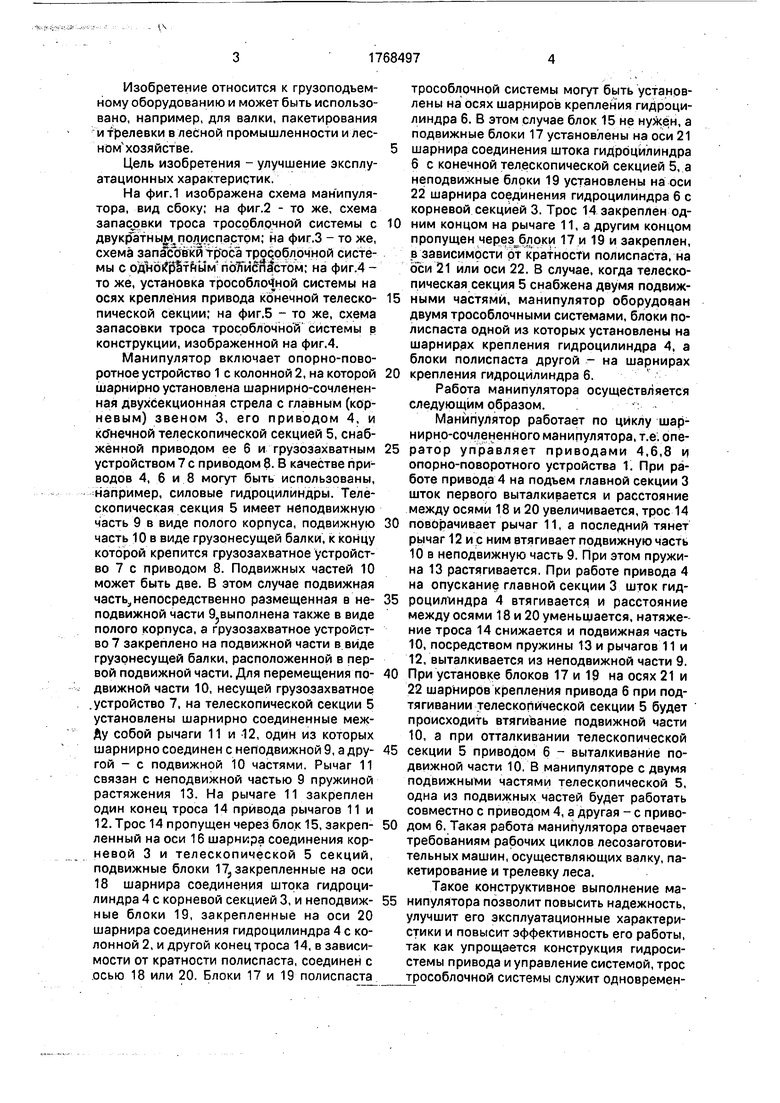
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 2006 |
|
RU2312056C1 |
| МАНИПУЛЯТОР | 2007 |
|
RU2345947C1 |
| Манипулятор | 2024 |
|
RU2833644C1 |
| Манипулятор лесной машины | 2024 |
|
RU2831151C1 |
| МАНИПУЛЯТОР | 2007 |
|
RU2356827C1 |
| Манипулятор | 2023 |
|
RU2812166C1 |
| ГИДРАВЛИЧЕСКИЙ КРАН-МАНИПУЛЯТОР | 2001 |
|
RU2193518C1 |
| СПОСОБ И МАШИНА ДЛЯ ТРЕЛЕВКИ | 2002 |
|
RU2224417C2 |
| НАВЕСНАЯ ТРЕЛЕВОЧНАЯ ТЕЛЕЖКА | 2022 |
|
RU2785391C1 |
| СТРЕЛОВОЕ УСТРОЙСТВО ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2001 |
|
RU2191740C1 |
// &
5 #
w
fe
О 00 Јь Ю 44
$
Изобретение относится к грузоподъемному оборудованию и может быть использовано, например, для валки, пакетирования и трелевки в лесной промышленности и лесном хозяйстве.
Цель изобретения - улучшение эксплуатационных характеристик.
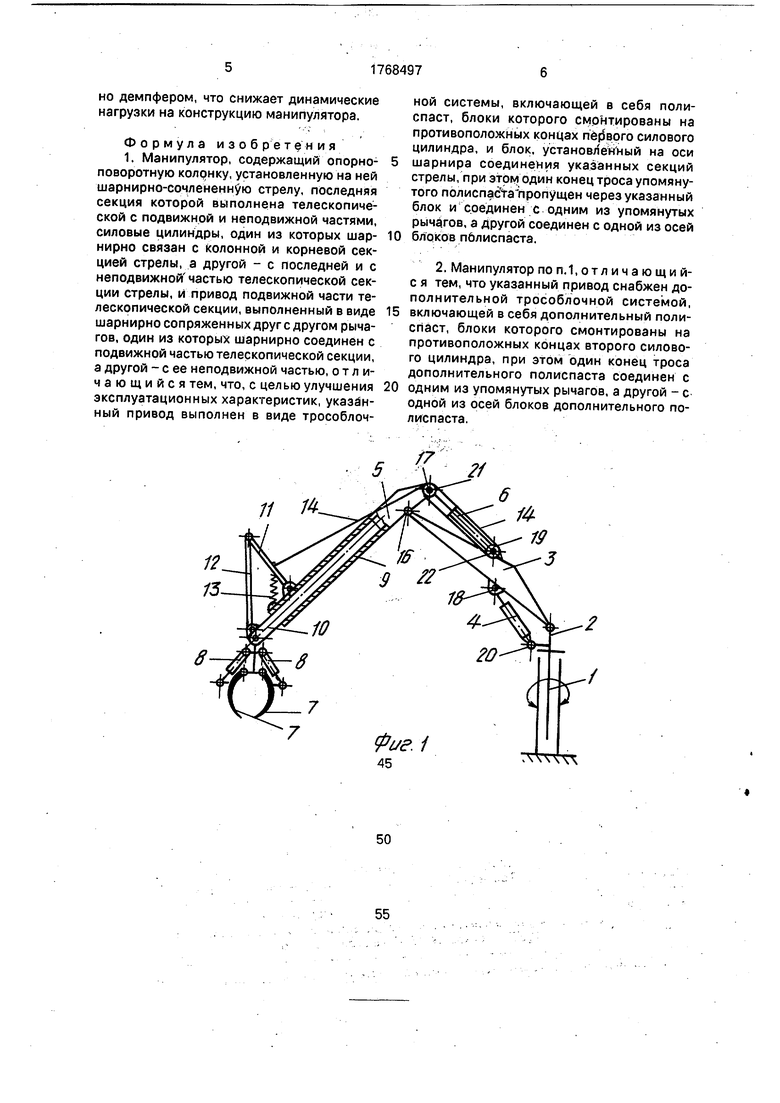
На фиг.1 изображена схема манипулятора, вид сбоку; на фиг.2 - то же, схема запасрвки троса трособлочной системы с двукратным полиспастом; на фиг.З - то же, схема запасЪвкй троса тро5облочной системы с полиспастом; на фиг.4 - то же, установка трособлочной системы на осях крепления привода конечной телескопической секции; на фиг.5 - то же, схема запасовки троса трособлочной системы в конструкции, изображенной на фиг.4.
Манипулятор включает опорно-поворотное устройство 1 с колонной 2, на которой шарнирно установлена шарнирно-сочленен- ная двухсекционная стрела с главным (корневым) звеном 3, его приводом 4, и конечной телескопической секцией 5, снабженной приводом ее б и грузозахватным устройством 7 с приводом 8. В качестве приводов 4, 6 и 8 могут быть использованы, например, силовые гидроцилиндры. Телескопическая секция 5 имеет неподвижную часть 9 в виде полого корпуса, подвижную часть 10 в виде грузонесущей балки, к концу которой крепится грузозахватное устройство 7 с приводом 8. Подвижных частей 10 может быть две. В этом случае подвижная часть,непосредственно размещенная в неподвижной части довыполнена также в виде полого корпуса, а грузозахватное устройство 7 закреплено на подвижной части в виде грузонесущей балки, расположенной в первой подвижной части. Для перемещения подвижной части 10, несущей грузозахватное устройство 7, на телескопической секции 5 установлены шарнирно соединенные между собой рычаги 11 и 12, один из которых шарнирно соединен с неподвижной 9, а другой - с подвижной 10 частями. Рычаг 11 связан с неподвижной частью 9 пружиной растяжения 13. На рычаге 11 закреплен один конец троса 14 привода рычагов 11 и 12. Трос 14 пропущен через блок 15, закрепленный на оси 16 шарнира соединения корневой 3 и телескопической 5 секций, подвижные блоки 17,, закрепленные на оси 18 шарнира соединения штока гидроцилиндра 4 с корневой секцией 3, и неподвиж- ные блоки 19, закрепленные на оси 20 шарнира соединения гидроцилиндра 4 с колонной 2, и другой конец троса 14, в зависимости от кратности полиспаста, соединен с осью 18 или 20 Блоки 17 и 19 полиспаста
трособлочной системы могут быть установлены на осях шарниров крепления гидроцилиндра 6. В этом случае блок 15 не нужен, а подвижные блоки 17 установлены на оси 21
шарнира соединения штока гидроцилиндра 6 с конечной телескопической секцией 5, а неподвижные блоки 19 установлены на оси 22 шарнира соединения гидроцилиндра 6 с корневой секцией 3. Трос 14 закреплен одним концом на рычаге 11, а другим концом пропущен через блоки 17 и 19 и закреплен, в зависимости от кратности полиспаста, на оси 21 или оси 22. В случае, когда телескопическая секция 5 снабжена двумя подвижными частями, манипулятор оборудован двумя трособлочными системами, блоки полиспаста одной из которых установлены на шарнирах крепления гидроцилиндра 4, а блоки полиспаста другой - на шарнирах
крепления гидроцилиндра 6.
Работа манипулятора осуществляется следующим образом.
Манипулятор работает по циклу шар- нирно-сочлененного манипулятора, т.е. оператор управляет приводами 4,6,8 и опорно-поворотного устройства 1. При работе привода 4 на подъем главной секции 3 шток первого выталкивается и расстояние между осями 18 и 20 увеличивается, трос 14
поворачивает рычаг 11, а последний тянет рычаг 12 и с ним втягивает подвижную часть 10 в неподвижную часть 9. При этом пружина 13 растягивается. При работе привода 4 на опускание главной секции 3 шток гидроцилиндра 4 втягивается и расстояние между осями 18 и 20 уменьшается, натяжение троса 14 снижается и подвижная часть 10, посредством пружины 13 и рычагов 11 и 12, выталкивается из неподвижной части 9.
При установке блоков 17 и 19 на осях 21 и 22 шарниров крепления привода 6 при подтягивании телескопической секции 5 будет происходить втягивание подвижной части 10, а при отталкивании телескопической
секции 5 приводом 6 - выталкивание подвижной части 10. В манипуляторе с двумя подвижными частями телескопической 5, одна из подвижных частей будет работать совместно с приводом 4, а другая - с приводом 6. Такая работа манипулятора отвечает требованиям рабочих циклов лесозаготовительных машин, осуществляющих валку, пакетирование и трелевку леса.
Такое конструктивное выполнение манипулятора позволит повысить надежность, улучшит его эксплуатационные характеристики и повысит эффективность его работы, так как упрощается конструкция гидросистемы привода и управление системой, трос
трособлочной системы служит одновременно демпфером, что снижает динамические нагрузки на конструкцию манипулятора.
Формула изобретения 1, Манипулятор, содержащий опорно- поворотную колонку, установленную на ней шарнирно-сочлененную стрелу, последняя секция которой выполнена телескопической с подвижной и неподвижной частями, силовые цилиндры, один из которых шар- нирно связан с колонной и корневой секцией стрелы, а другой - с последней и с неподвижной частью телескопической секции стрелы, и привод подвижной части телескопической секции, выполненный в виде шарнирно сопряженных друг с другом рычагов, один из которых шарнирно соединен с подвижной частью телескопической секции, а другой - с ее неподвижной частью, отличающийся тем, что, с целью улучшения эксплуатационных характеристик, указён- ный привод выполнен в виде трособлоч// /4
ной системы, включающей в себя полиспаст, блоки которого смонтированы на противоположных концах первого силового цилиндра, и блок, установленный на оси
шарнира соединения указанных секций стрелы, при этом один конец троса упомянутого полиспаста пропущен через указанный блок и соединен с одним из упомянутых рычагов, а другой соединен с одной из осей
блоков полиспаста.
включающей в себя дополнительный полиспаст, блоки которого смонтированы на противоположных концах второго силового цилиндра, при этом один конец троса дополнительного полиспаста соединен с
одним из упомянутых рычагов, а другой - с одной из осей блоков дополнительного полиспаста.
/4
19
Фиг. 2
Я 14
ft
ЙГ4
Фигз
13
рс/г. S
