Изобретение относится к лесному машиностроению и может быть использовано на рубках осветления и прочистки, расчистке трасс линий электропередач, газо-нефтепроводов.
Известен манипулятор (авторское свидетельство СССР №1768497), включающий опорно-поворотное устройство, установленную на нем шарнирно-сочлененную стрелу, последняя секция которой выполнена телескопической с подвижными и неподвижной частями, силовые цилиндры, один из которых шарнирно связан с колонной и корневой секцией стрелы, а другой - с последней и неподвижной частью телескопической секции стрелы, и привод подвижных частей телескопической секции, выполненный в виде трособлочной системы, включающей полиспаст, блоки которого смонтированы на противоположных концах второго силового цилиндра, и трос, один конец которого соединен с одной из осей блоков полиспаста, а другой - с подвижной частью телескопической секции.
Недостатком данного манипулятора является относительная сложность привода подвижных частей телескопической секции, особенно когда подвижных частей в телескопической секции две и более, множество шарниров в приводе, что снижает долговечность и увеличивает материалоемкость.
Известен также манипулятор (Патент РФ №2312056), включающий опорно-поворотное устройство, установленную на нем шарнирно-сочлененную стрелу, последняя секция которой выполнена телескопической с подвижными и неподвижной частями, силовые цилиндры, один из которых шарнирно связан с колонной и корневой секцией стрелы, а другой - с последней и неподвижной частью телескопической секции рукояти и привод подвижных частей телескопической секции выполнен в виде трособлочной системы, включающий полиспаст, блоки которого смонтированы на противоположных концах второго силового цилиндра, и трос, один конец которого соединен с одной из осей блоков полиспаста, а другой - с подвижными частями телескопической секции, причем конец троса после полиспаста пропущен через отверстия в кронштейнах, жестко закрепленных на неподвижной и подвижных частях телескопической секции, и закреплен на конце последней подвижной части телескопической секции. На каждой подвижной части телескопической секции между кронштейнами установлены пружины сжатия.
Недостатком данного манипулятора являются перекос при работе и возможность соскакивания пружин с кронштейнов подвижных частей телескопической секции, большие габариты, большая вероятность разрыва троса трособлочной системы.
Технический результат – вероятность изгиба пружин в вертикальной и горизонтальной плоскостях при втягивании секций телескопической рукояти.
Технический результат достигается тем, что манипулятор лесной машины состоит из опорно-поворотной платформы, стрелы, гидроцилиндра привода стрелы, телескопической рукояти, состоящей из неподвижной секции в виде полого цилиндрического корпуса, соединенной шарнирно со стрелой в верней части, согласно изобретению, подвижные секции телескопической рукояти, выполненные также в виде полых цилиндрических корпусов с буртиками в передних их частях и кронштейнами с отверстиями установленных в верхних частях буртиков, секции имеют боковые прорези, выполняющих роль направляющих, а на задних частях подвижных секций имеются бобышки, вставленные в прорези и выступающие за их пределы наружу, а также перемещающихся в прорезях, предотвращающих вращение подвижных секций относительно друг друга и относительно неподвижной секции, внутри неподвижной секции, и подвижных секций установлены пружины сжатия таким образом, что один конец пружин упирается в гнездо соответствующей секции в задней части, выполненной в виде чашки, а другой конец пружин в гнездо последующей секции, выполненной в виде чашки, через отверстия в кронштейнах проходит трос, одним концом жестко закрепленный к кронштейну подвижной секции, а другим концом проходя через отверстия в кронштейнах подвижных секций8, а также кронштейн и корпус неподвижной секции, огибая блоки жестко закреплен на стреле, гидроцилиндра привода неподвижной секции телескопической рукояти.
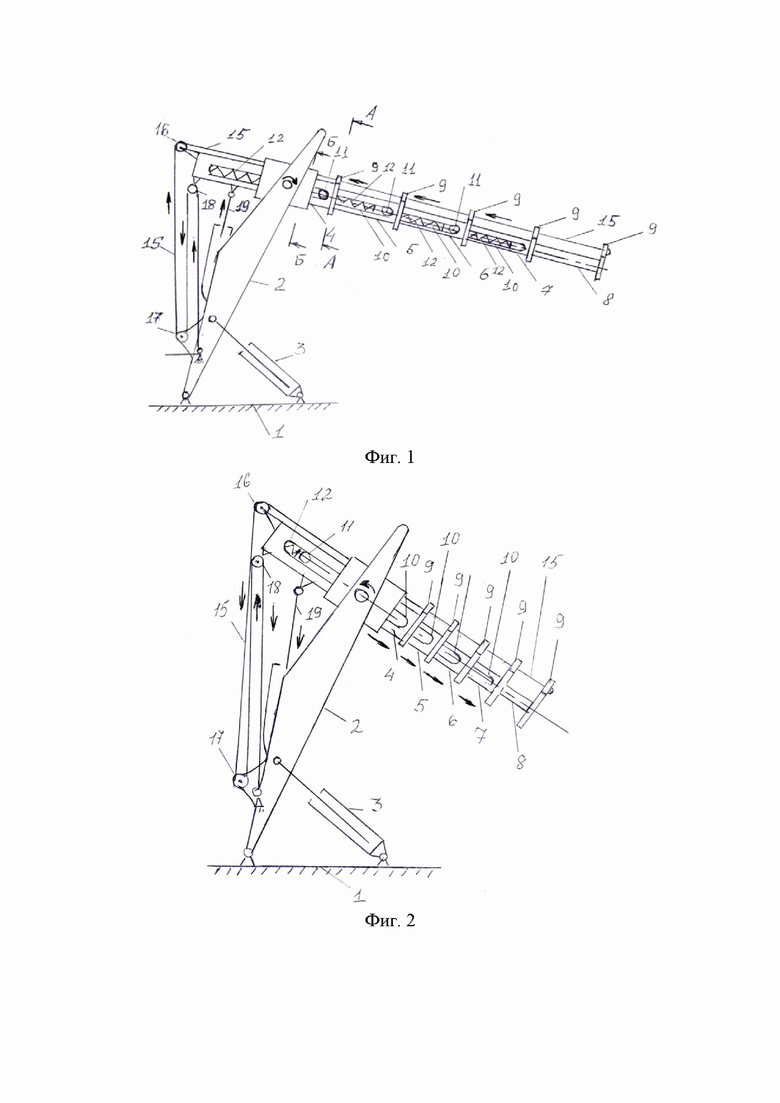
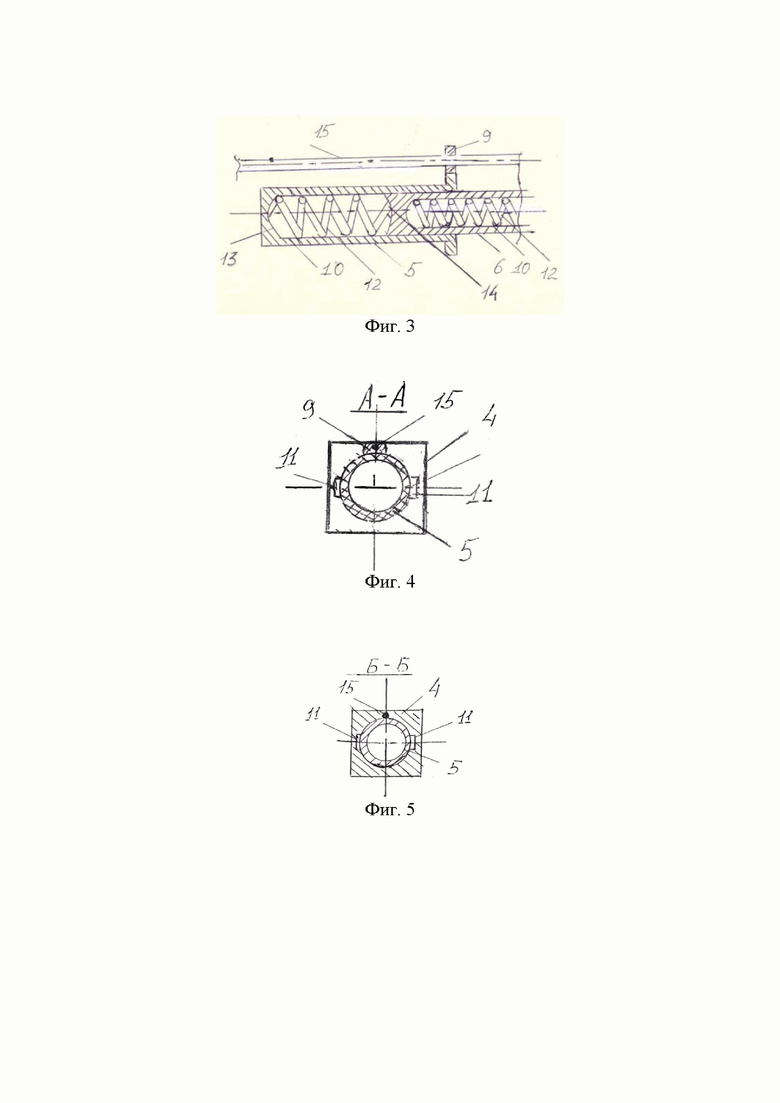
На фиг.1 изображена схема манипулятора лесной машины в рабочем положении, вид сбоку; на фиг.2 - то же, в сложенном положении, вид сбоку; на фиг.3 – показано одно из сечений подвижных секций (другие аналогично), на фиг. 4 показан разрез А-А неподвижной секции телескопической рукояти, на фиг. 5 показан разрез Б-Б неподвижной секции телескопической рукояти.
Манипулятор лесной машины состоит из опорно-поворотной платформы 1, стрелы 2, гидроцилиндра привода стрелы 3, телескопической рукояти, состоящей из неподвижной секции 4 в виде полого цилиндрического корпуса, соединенной шарнирно со стрелой 2 в верней части и подвижных секций 5, 6 и 7, выполненных также в виде полых цилиндрических корпусов, за исключением последней подвижной секции 8, изготовленную цельнометаллической, с буртиками в передних их частях и кронштейнами 9 с отверстиями установленных в верхних частях буртиков, секции 4, 5, 6 и 7 имеют боковые прорези 10, выполняющих роль направляющих, а на задних частях подвижных секций 5, 6, 7 и 8 имеются бобышки 11, вставленные в прорези 10 и выступающие за их пределы наружу, а также перемещающихся в прорезях 10, предотвращающих вращение подвижных секций 5, 6, 7 и 8 относительно друг друга и относительно неподвижной секции 4, внутри неподвижной секции 4, и подвижных секций 5, 6 и 7 установлены пружины сжатия 12 таким образом, что один конец пружин 12 упирается в гнездо соответствующей секции в задней части (показана на фиг 3 подвижной секции 5), выполненной в виде чашки 13, а другой конец пружин 12 в гнездо последующей секции (показана на фиг. 3 подвижной секции 6), выполненной в виде чашки 14, через отверстия в кронштейнах 9 проходит трос 15, одним концом жестко закрепленный к кронштейну 9 подвижной секции 8, а другим концом проходя через отверстия в кронштейнах 9 подвижных секций 5, 6, 7 и 8, а также кронштейн 9 и корпус неподвижной секции 4, огибая блоки 16, 17 и 18 жестко закреплен на стреле 2, гидроцилиндра 19 привода неподвижной секции 4 телескопической рукояти.
Манипулятор лесной машины работает следующим образом.
При выдвижении штока гидроцилиндра 19 из рабочего положения происходит поворот неподвижной секции 4 по часовой стрелке (показано на фиг. 1 стрелками) относительно оси ее крепления к стреле 2. При этом блоки 16 и 18 также движутся по окружности (по часовой стрелке).
Длина каната 15 между блоками 16 и 17 левой ветви трособлочной системы, между блоком 18 и жесткой опоры крепления каната к стреле увеличивается, а длина каната 15 между блоком 17 и 18 правой ветви трособлочной системы уменьшается (показано на фиг. 1 стрелками). Внутри неподвижной секции 4 и подвижных секций 5, 6 и 7 телескопической рукояти длина троса 15 уменьшается (показана на фиг. 1 стрелками), и за счет сжатия пружин 12 происходит вдвигание подвижной секции 8 внутрь секции 7, а секции 7 внутрь секции 6, а секции 6 внутрь секции 5, а секции 5 внутрь неподвижного корпуса 4 телескопической рукояти. Манипулятор лесной машины занимает сложенное положение телескопической рукояти.
При втягивании штока гидроцилиндра 19 из сложенного положения происходит поворот неподвижной секции 4 против часовой стрелки (показано на фиг. 2 стрелками) относительно оси ее крепления к стреле 2. При этом блоки 16 и 18 также движутся по окружности против часовой стрелки (показано на фиг. 2 стрелками).
Длина каната 15 между блоками 16 и 17 левой ветви трособлочной системы, между блоком 18 и жесткой опоры крепления каната к стреле уменьшается, а длина каната 15 между блоком 17 и 18 правой ветви трособлочной системы увеличивается (показано на фиг. 2 стрелками). Внутри неподвижной секции 4 и подвижных секций 5, 6 и 7 телескопической рукояти длина троса 15 увеличивается (показана на фиг. 2 стрелками), и за счет растяжения пружин 12 происходит выдвигание подвижной секции 8 из секции 7, а секции 7 из секции 6, а секции 6 из секции 5, а секции 5 из неподвижного корпуса 4 телескопической рукояти. Манипулятор лесной машины занимает рабочее выдвинутое положение телескопической рукояти.
Положение конца подвижной секции 8 регулируется гидроцилиндром привода стрелы 3.
В результате использования данного манипулятора лесной машины предотвращается вероятность изгиба пружин в вертикальной и горизонтальной плоскостях при втягивании секций телескопической рукояти.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 2024 |
|
RU2833644C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2312056C1 |
| Манипулятор | 1989 |
|
SU1768497A1 |
| Манипулятор | 2023 |
|
RU2812166C1 |
| МАНИПУЛЯТОР | 2007 |
|
RU2356827C1 |
| МАНИПУЛЯТОР | 2007 |
|
RU2345947C1 |
| Механизм перемещения секций телескопической стрелы | 1986 |
|
SU1368255A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2037464C1 |
| СПОСОБ И МАШИНА ДЛЯ ТРЕЛЕВКИ | 2002 |
|
RU2224417C2 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
Изобретение относится к лесному машиностроению. Манипулятор лесной машины состоит из опорно-поворотной платформы, стрелы, гидроцилиндра привода стрелы, телескопической рукояти, содержащей неподвижную секцию в виде полого цилиндрического корпуса, соединенную шарнирно со стрелой в верхней части. Подвижные секции телескопической рукояти выполнены в виде полых цилиндрических корпусов с буртиками в передней части и кронштейнами с отверстиями установленных в верхних частях буртиков, за исключением последней подвижной секции, изготовленной цельнометаллической, секции имеют боковые прорези, выполняющие роль направляющих, а на задних частях подвижных секций имеются бобышки, вставленные в прорези и выступающие за их пределы наружу, а также перемещающиеся в прорезях, предотвращающих вращение подвижных секций относительно друг друга и относительно неподвижной секции. Внутри неподвижной секции и подвижных секций установлены пружины сжатия таким образом, что один конец пружин упирается в гнездо соответствующей секции в задней части, выполненной в виде чашки, а другой конец пружин в гнездо последующей секции, выполненной в виде чашки. Через отверстия в кронштейнах проходит трос, одним концом жестко закрепленный к кронштейну подвижной секции, а другим концом проходя через отверстия в кронштейнах подвижных секций, а также кронштейн и корпус неподвижной секции, огибая блоки, жестко закреплен на стреле гидроцилиндра привода неподвижной секции телескопической рукояти. Предотвращается вероятность изгиба пружин в вертикальной и горизонтальной плоскостях при втягивании секций телескопической рукояти. 5 ил.
Манипулятор лесной машины, состоящий из опорно-поворотной платформы, стрелы, гидроцилиндра привода стрелы, телескопической рукояти, содержащей неподвижную секцию в виде полого цилиндрического корпуса, соединенную шарнирно со стрелой в верхней части, отличающийся тем, что подвижные секции телескопической рукояти выполнены в виде полых цилиндрических корпусов с буртиками в передней части и кронштейнами с отверстиями установленных в верхних частях буртиков; за исключением последней подвижной секции, изготовленной цельнометаллической, секции имеют боковые прорези, выполняющие роль направляющих, а на задних частях подвижных секций имеются бобышки, вставленные в прорези и выступающие за их пределы наружу, а также перемещающиеся в прорезях, предотвращающих вращение подвижных секций относительно друг друга и относительно неподвижной секции, внутри неподвижной секции и подвижных секций установлены пружины сжатия таким образом, что один конец пружин упирается в гнездо соответствующей секции в задней части, выполненной в виде чашки, а другой конец пружин - в гнездо последующей секции, выполненной в виде чашки, через отверстия в кронштейнах проходит трос, одним концом жестко закрепленный к кронштейну подвижной секции, а другим концом проходя через отверстия в кронштейнах подвижных секций, а также кронштейн и корпус неподвижной секции, огибая блоки, жестко закреплен на стреле гидроцилиндра привода неподвижной секции телескопической рукояти.
| МАНИПУЛЯТОР | 2006 |
|
RU2312056C1 |
| Манипулятор | 1989 |
|
SU1768497A1 |
| Перебойный коммутатор | 1929 |
|
SU14291A1 |
| СПОСОБ НАВЕДЕНИЯ РАБОЧЕГО ОРГАНА МАНИПУЛЯТОРА ЛЕСНОЙ МАШИНЫ НА ОБЪЕКТ | 2010 |
|
RU2468573C2 |
| СКАЛКА | 2024 |
|
RU2840508C1 |

