Общая область техники
Изобретение относится к устройствам управления авиационными двигателями типа турбореактивного двигателя. В частности, оно относится к устройствам, применяющим избыточные вычисления на основании измерений, поступающих от датчиков, выполненных с возможностью измерять параметры двигателя.
Уровень техники
Турбореактивный двигатель обычно оснащен устройством управления, которое обеспечивает также защиту от событий, последствия которых являются опасными или катастрофическими, например, таких как превышение скорости двигателя. Таким образом, одно и то же устройство выполняет эти две функции.
Такое устройство управления обычно содержит два идентичных канала, которые обеспечивают избыточность считывания параметров и вычисление заданного значения для управления одним или несколькими приводами.
В идеале каналы являются независимыми друг от друга, но часто они обмениваются данными, чтобы обеспечивать консолидацию измерений. Консолидация предназначена для того, чтобы оба канала производили одинаковые вычисления в один и тот же момент для обеспечения умеренной избыточности устройства управления: один канал является активным и управляет приводами, и один канал является пассивным и готов в любой момент стать активным в случае, когда в системе возникнет сбой. Действительно, сбой на одном канале может привести к опасным или катастрофическим событиям.
В случае, когда одно и то же устройство обеспечивает управление двигателем и защиту от этих событий, необходимо предусмотреть мониторинг процессоров, осуществляющих вычисления, чтобы убеждаться в их исправности. Действительно, неисправность процессора может привести к началу превышения скорости двигателя.
Такой мониторинг осуществляют, сравнивая результаты вычислений каждого из каналов, при этом так называемый активный канал управляет приводами (например, устройствами изменяемой геометрии и/или топливными дозаторами двигателя). В случае расхождения между вычислениями, пассивный канал отключают, и устройство управления становится одноканальным.
Проблема состоит в том, что, сравнивая только результаты вычислений на каждом из каналов, невозможно распознать проблему между проблемой неисправности процессора и проблемой обмена данными между каналами.
При этом, даже кратковременный разрыв межканальной связи останавливает совокупный мониторинг и заставляет обезопасить систему, так как это может привести к различиям в вычислениях. Защита состоит в изолировании пассивного канала на весь оставшийся полет, что отрицательно сказывается на возможности избыточности в ходе полета и на возможности использования вычислительных устройств, находящихся в обслуживании для поиска проблем.
Таким образом, отключенный канал может быть исправным каналом, так как при проблеме связи невозможно сказать, находится ли ошибка в передающем или в принимающем канале. Если остающийся канал оказывается неисправным, и эта неисправность может быть обнаружена путем самотестирования аппаратных средств, она тоже завершается самоизоляцией, что может привести к выключению двигателя. Следовательно, этот тип поведения отрицательно сказывается на возможном времени остановки двигателя в полете.
Раскрытие изобретения
Задачей изобретения является повышение робастности (то есть надежности) системы в отношении потерь межканальной связи, чтобы иметь возможность надежно локализовать аномалии и, таким образом, обеспечивать изоляцию только неисправного канала.
Для этого в качестве объекта изобретения предложено устройство управления двигателем, содержащее первый канал управления и второй канал управления, при этом каждый канал управления содержит первый датчик и второй датчик, каждый из которых выполнен с возможностью выдавать соответственно первое измерение и второе измерение в каждый канал, при этом каждый из каналов имеет активное или пассивное состояние, определяющее активный канал или пассивный канал, при этом активный канал предназначен для управления по меньшей мере одним приводом двигателя, тогда как пассивный канал предназначен для замещения активного канала в случае неисправности последнего, при этом устройство выполнено таким образом, что каждый канал содержит:
- блок, предназначенный для объединения измерений, при этом каждый блок получает на входе измерения, поступающие из двух каналов по меньшей мере через одну межканальную линию связи, так чтобы получить объединенный параметр,
- блок. предназначенный для вычисления по меньшей мере одной команды по меньшей мере одного привода двигателя, при этом устройство имеет:
- номинальный режим работы, в котором вычислительный блок каждого канала вычисляет команду в зависимости от объединенного параметра и от команды, вычисленной в предыдущий момент вычисления, при этом приводом управляет активный канал,
- аварийный режим работы при разрыве линии связи, в котором вычислительный блок пассивного канала вычисляет команду в зависимости от команды, вычисленной активным каналом в предыдущий момент вычисления.
Предпочтительно изобретение дополнено следующими признаками, рассматриваемыми отдельно или в любой из их технически возможных комбинаций:
- каждый канал дополнительно содержит блок мониторинга процессов, выполненный с возможностью обнаруживать различие между значениями команд, вычисляемыми двумя каналами;
- блок мониторинга процессов выполнен с возможностью отключать временно или окончательно пассивный канал в случае обнаружения различия между значениями команд, вычисленными двумя каналами;
- объединительный блок определяет среднее из значений, измеряемых двумя каналами;
- вычислительный блок каждого канала осуществляет вычисление, требующее по меньшей мере одного результата, вычисленного самим блоком на предшествующем временном шаге;
- вычислительный блок каждого канала осуществляет вычисление, требующее по меньшей мере одного промежуточного результата, вычисленного самим блоком на предшествующем шаге вычисления;
- аварийный режим работы активируют на период времени, соответствующий продолжительности разрыва указанной по меньшей мере одной межканальной линии связи;
- аварийный режим работы активируют на период времени, соответствующий времени между вычислением промежуточного значения и наиболее удаленным моментом времени, в течение которого при вычислениях используется это значение в качестве исходных данных;
- аварийный режим работы активируют в течение заранее определенного времени, оцениваемого при помощи тестов на неисправность линии связи;
- блок мониторинга процессов выполнен с возможностью окончательного отключения пассивного канала в случае обнаружения различия между значениями команд, вычисленными двумя каналами сразу после завершения аварийного режима работы;
- когда один из двух каналов ожидает получения измерений от другого канала, указанный другой канал заранее осуществляет последующие предусмотренные вычисления, не требующие измерений от второго канала, которые он в этот момент не имеет.
Изобретение имеет ряд преимуществ.
Обеспечение избыточности с повышением робастности линии связи по отношению к кратковременным неисправностям. Это позволяет улучшить также защиту от катастрофических и опасных рисков.
Эксплуатационная готовность вычислительных устройств к обслуживанию за счет облегчения поиска неисправностей, а также за счет уменьшения количества вычислительных устройств с неподтвержденными неисправностями или ошибочно снятых вычислительных устройств.
Частота остановок двигателя в полете, связанных с неисправностью одного из двух каналов устройства управления.
Описание фигур
Другие признаки, задачи и преимущества изобретения будут более очевидны из нижеследующего описания, представленного в качестве исключительно иллюстративного и не ограничительного примера, со ссылками на прилагаемые чертежи, на которых:
фиг. 1 - пример устройства управления двигателем, содержащего два канала согласно варианту выполнения изобретения;
фиг. 2 - пример выполнения вычислительного блока заявленного устройства управления;
фиг. 3-5 - схемы этапов обработки, осуществляемых в устройстве управления.
На всех фигурах подобные элементы имеют одинаковые обозначения.
Подробное описание изобретения
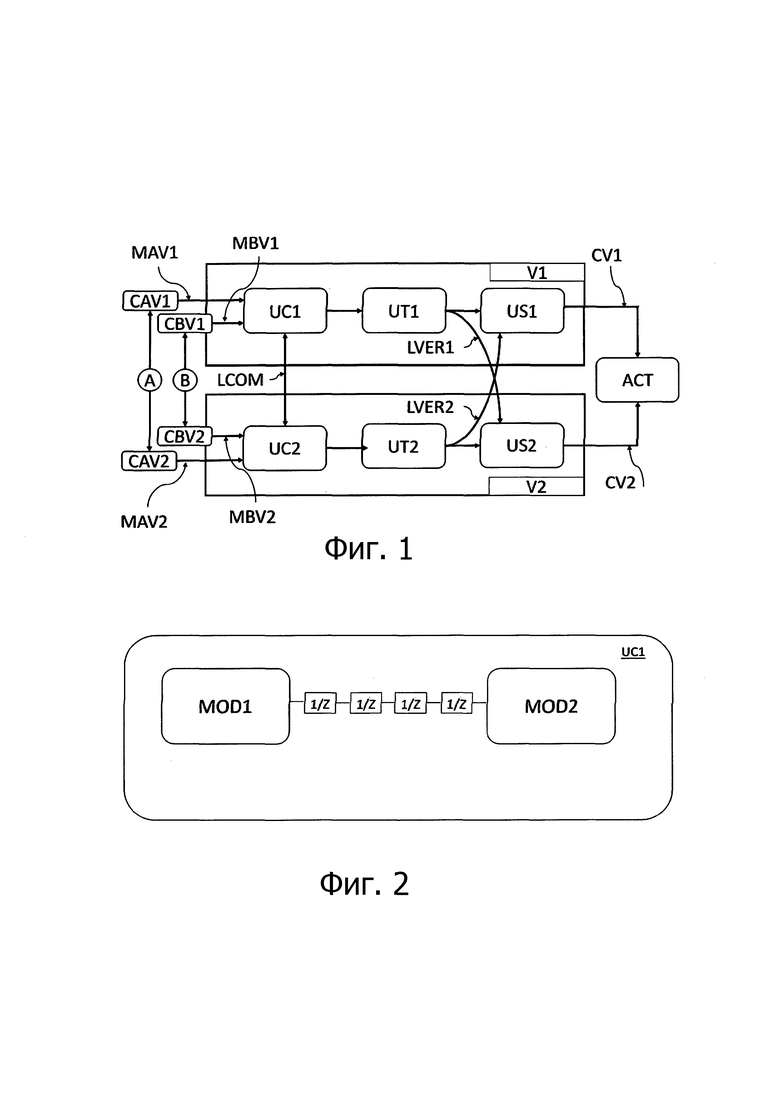
На фиг. 1 показано устройство управления двигателем согласно варианту выполнения изобретения. Предпочтительно двигатель является авиационным двигателем, таким как газотурбинный двигатель.
Устройство управления содержит два канала управления: первый канал V1 управления и второй канал V2 управления.
Каждый канал V1, V2 управления позволяет управлять по меньшей мере одним приводом АСТ в зависимости от вычисленной команды или заданного значения CV1, CV2. Во время работы только один из двух каналов управляет приводом АСТ. Речь идет об активном канале. Другой канал считается пассивным и может заменить активный канал в случае неисправности указанного активного канала.
Каждый канал V1, V2 управления получает на входе измеряемые величины А, В, на основании которых вычисляют команду привода АСТ. Этими величинами являются, например, температура и т.д.
В примере, представленном на фиг. 1, каждый канал получает две разные измеряемые величины А, В, при этом каждый канал измеряет одни и те же величины. В частности, для каждого канала V1, V2 эти величины измеряются разными или идентичными датчиками:
- Для первого канала V1: первое измерение MAV1 первой величины А производит первый датчик CAV1, и второе измерение MBV1 второй величины В производит второй датчик CBV1.
- Для второго канала V2: первое измерение MAV2 первой величины А производит первый датчик CAV2, и второе измерение MBV2 второй величины В производит второй датчик CBV2.
Используемые датчики зависят от измеряемых величин: температурный датчик для температуры и т.д.
Чтобы определить команду CV1, CV2, каждый канал должен произвести определенный объем вычислений с полученными измерениями.
В частности, каждый канал содержит блок UC1, UC2 обработки данных, позволяющий объединить данные, измеренные датчиками каждого из двух каналов, при помощи процесса консолидации, например, определяя среднее из значений, измеренных датчиками каждого из двух каналов.
Понятно, что между каналами V1, V2 происходит обмен данными при помощи межканальной линии связи LCOM.
Для каждого канала результат консолидации данных используется вычислительным блоком UT1, UT2, который вычисляет заданные значения CV1, CV2 для привода АСТ.
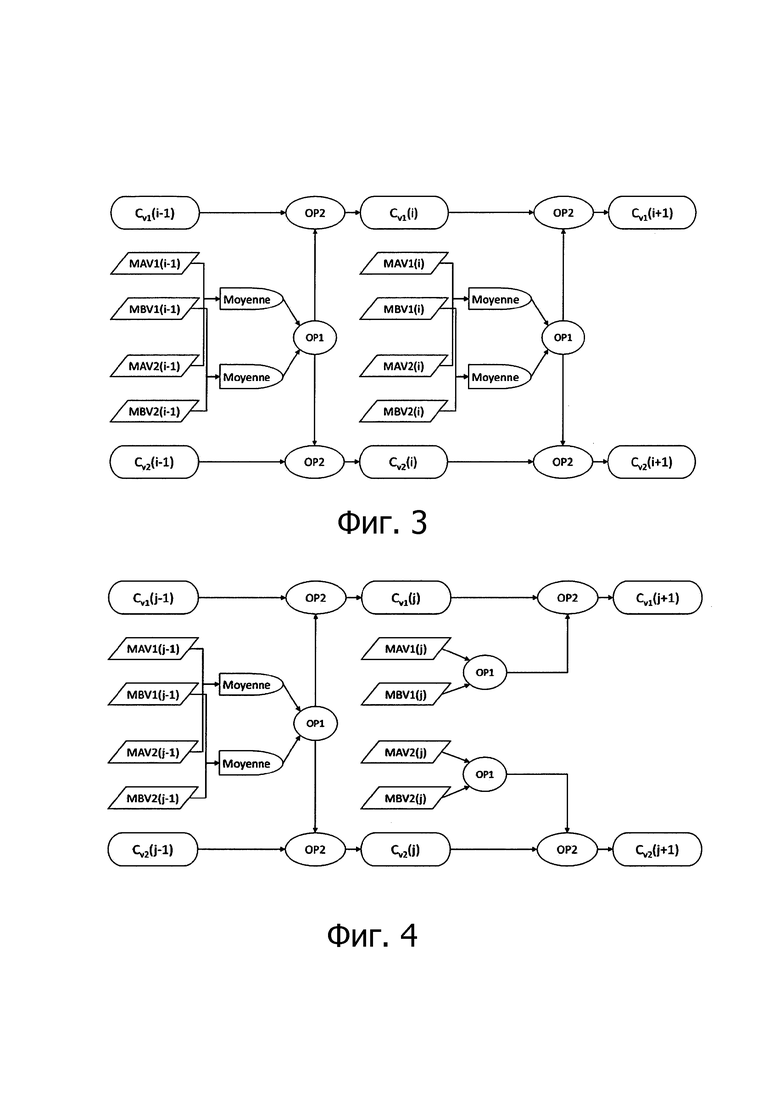
Предпочтительно вычислительный блок UT1, UT2 может использовать в качестве входных данных команды, вычисленные в один или несколько предыдущих моментов вычисления, а также промежуточные результаты, вычисленные в один или несколько предыдущих моментов вычисления. В этом случае вычислительный блок может содержать первый модуль MOD1 вычисления и второй модуль MOD2 вычисления: один из них осуществляет первую часть вычислений, а второй осуществляет вычисления, требующие произведенных ранее промежуточных вычислений (см. фиг. 2). Данные от первого модуля поступают во второй модуль с задержкой, как правило, от 1 до 4 моментов вычислений.
При номинальной работе команды CV1, CV2, вычисляемые каждым из каналов, являются идентичными. Чтобы убедиться, что это именно так, каждый канал содержит также блок US1, US2 мониторинга, проверяющий, что вычисленные команды CV1, CV2 являются идентичными. Чтобы сравнить вычисленные команды, блок US1, US2 мониторинга получает команды, вычисленные каналом, к которому он принадлежит, а также команды, вычисленные другим каналом, через линию LVER1, LVER2 связи.
При обнаружении различия между двумя вычисленными командами CV1, CV2 механизмы самотестирования вычислительных блоков UT1, UT2 позволяют определить, откуда могут происходить ошибки, и отключить один из каналов, который в этом случае не направляет информацию в другой канал. В этом случае можно выбрать канал, который будет в «активном» состоянии или в «пассивном» состоянии, и отключить канал, который находится в «пассивном» состоянии.
Действительно, как было указано во вступительной части, каждый из каналов V1, V2 управления имеет индикатор «активного» или «пассивного» состояния. Он позволяет определить, какой канал реально управляет приводом или приводами АСТ двигателя. Эти состояния являются эксклюзивными: оба канала V1, V2 не могут быть в одном и том же состоянии, один из них должен быть активным, а другой пассивным.
С другой стороны, если механизмы самотестирования не обнаружили источник ошибки, пассивный канал всегда отключают. При этом теряется обеспечиваемая им избыточность. Понятно, что в этом случае существует возможность отключения канала, несмотря на то что он не имеет проблемы, поскольку проблема может находиться в указанной по меньшей мере одной межканальной линии связи LCOM.
Следовательно, вместо отключения пассивного канала, если предположить, что проблема происходит от межканальной линии связи LCOM, устройство управления будет иметь аварийный режим работы, в котором производят передачу команд, вычисляемых блоками UT1, UT2. В частности, эта передача происходит от активного канала к пассивному каналу. Когда вычисления, производимые вычислительным блоком, основаны на результатах, вычисленных на предыдущем временном шаге, это позволяет объединить входные данные вычислительных блоков обоих каналов, чтобы обеспечить схождение команд по истечении определенного числа временных шагов.
Предпочтительно для вычислительного блока время вычисления устанавливают как время t, например, составляющее от 5 до 50 мс, как правило, t = 15 мс, которое является ограниченным, и превышение этого времени приводит к исключению вычислительного блока и к отключению канала, к которому относится это исключение. Следовательно, необходимо тщательно следить за вычислительной нагрузкой вычислительного блока. В случае разрыва связи между каналами V1, V2 и после восстановления межканальной линии связи LCOM необходимо отслеживать механизмы передачи вычисляемых команд для обеспечения схождения вычислений. Это приводит к вычислительной перегрузке вычислительного блока. Следовательно, необходимо оптимизировать продолжительность обмена данными и упорядочение вычислений, чтобы соблюдать временные ограничения блока обработки.
Пример варианта аварийной работы устройства управления согласно предпочтительному варианту осуществления изобретения
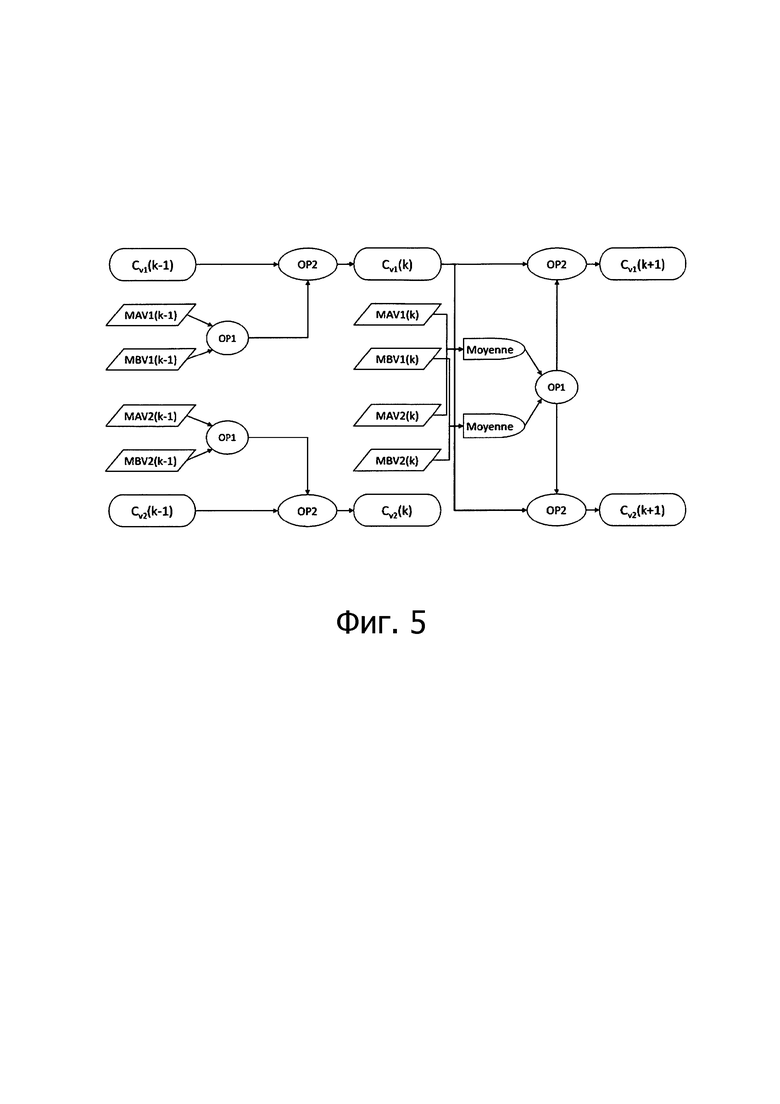
Такой пример представлен на фиг. 3-5. Представленный пример является примером вычисления, учитывающего только результат на предыдущем временном шаге:
в этом примере предполагается, что
Пока система не страдает от неисправности в межканальной линии связи, вычисления происходят, как показано на фиг. 3. Кроме того, в этом примере канал V1 является активным каналом, тогда как канал V2 является пассивным каналом.
Чтобы определить команду для применения к приводу АСТ на временном шаге  , вычисления производят на основании данных, измеренных датчиками, связанными с каналами управления. В упрощенном примере производят следующие вычисления:
, вычисления производят на основании данных, измеренных датчиками, связанными с каналами управления. В упрощенном примере производят следующие вычисления:


где:

Это соответствует фиг. 2, где операторы ОР1, ОР2 являются, например, суммой двух членов, полученных на входе. Можно также предусмотреть другие операторы.
В данном случае очевидно, что после описанных ранее вычислений в рамках номинального режима работы, если допустить, что на предыдущем шаге вычисления получили:
то на текущем шаге вычисления проверяется следующее равенство:

С другой стороны, если на межканальной линии связи в момент j происходит разрыв, объединительные блоки не могут обмениваться данными, измеряемыми датчиками, связанными со своими соответствующими каналами. В этом случае вычисления, осуществляемые вычислительным блоком, происходят как показано на фиг. 4: каждый из двух каналов производит представленные ранее вычисления без этапа консолидации (в данном случае без среднего). Таким образом, вычислительный блок осуществляет следующие вычисления:


Однако данные одного и того же типа, измеренные датчиками каждого из двух каналов, на практике всегда являются разными (поэтому необходима консолидация). Следовательно:

и в этом случае команды, вычисляемые двумя каналами, уже не будут идентичными:
Блоки мониторинга определяют как ошибку это расхождение между вычисленными командами. Кроме того, даже если линия связи восстановлена, то поскольку предыдущие вычисления являются разными после вычисления, вычисленные команды будут различаться, команда в одном канале от команды в другом канале.
Чтобы решить эту проблему, результаты, вычисленные активным каналом (в этом примере канал V1), направляют в пассивный канал (в этом примере канал V2), когда линия связи восстановлена в момент k, как показано на фиг. 5. Осуществляемые в данном случае вычисления имеют следующий вид:


Следовательно:

Отмечается, что при восстановлении межканальной линии связи LCOM значения команд CV1, CV2 являются идентичными.
Возможный пример осуществления изобретения
Например, вычислительные блоки каждого из двух каналов можно разделить на два модуля MOD1, MOD2, как показано на фиг. 2. В этом случае осуществляемые вычисления основаны на нескольких предыдущих результатах. В частности, в производимых вычислениях используются результаты 4 предыдущих команд, а также промежуточные результаты после 3 предыдущих моментов вычислений. В этом случае необходимо произвести обмен командами, вычисленными во время нескольких моментов вычислений, чтобы максимально оптимизировать продолжительность этих обменов, которые являются затратными в отношении времени вычисления. Они должны происходить в течение максимально короткого времени:
- если используют одну или несколько предыдущих команд на входе вычислительных блоков с временем задержки  , измеренным как число моментов вычислений, команды должны передаваться от активного канала в пассивный канал в течение такого числа моментов вычислений, который эквивалентен продолжительности разрыва линии связи;
, измеренным как число моментов вычислений, команды должны передаваться от активного канала в пассивный канал в течение такого числа моментов вычислений, который эквивалентен продолжительности разрыва линии связи;
- если используют один или несколько промежуточных результатов с задержкой  , команды должны передаваться от активного канала в пассивный канал в течение этапа вычислений.
, команды должны передаваться от активного канала в пассивный канал в течение этапа вычислений.
Кроме того, чтобы удовлетворять системным требованиям в реальном времени, характерным для любого бортового устройства управления, продолжительность каждого цикла не должна превышать заранее определенное время, например, 15 мс, после чего необходимо оптимизировать порядок добавляемых операций, чтобы продолжать соблюдать это требование. Для этого порядок задач, выполняемых вычислительными блоками, изменяют, чтобы производить вычисления, когда они находятся в ожидании получения данных по линии передачи данных. Таким образом, освобождается время вычисления:
- в номинальном режиме работы при отсутствии неисправностей;
- в аварийном режиме работы при неисправности связи;
- в аварийном режиме работы после восстановления межканальной связи во время обмена данными от активного канала в пассивный канал.
Высвобожденное время вычисления позволяет, таким образом, соблюдать заданные временные ограничения, а также производить дополнительное самотестирование, чтобы выявить нарушение в работе компонента одного из двух каналов.
Изобретение относится к устройству управления двигателем типа турбореактивного двигателя. Устройство содержит первый канал (V1) управления и второй канал (V2) управления, каждый канал управления содержит первый датчик (CAV1, CAV2) и второй датчик (CBV1, CBV2), каждый из которых выполнен с возможностью выдавать первое измерение (А) и второе измерение (В) в каждый канал, при этом каждый из каналов имеет активное или пассивное состояние, определяющее активный канал (V1) или пассивный канал (V2). Активный канал (V1) предназначен для управления одним приводом (АСТ) двигателя, тогда как пассивный канал (V2) предназначен для замещения активного канала в случае неисправности последнего. В случае аварийного режима работы при разрыве указанной линии связи (LCOM) указанный вычислительный блок (UT2) пассивного канала вычисляет команду (CV2) в зависимости от команды (CV1), вычисленной активным каналом (V1) в предыдущий момент вычислений. Технический результат - повышение робастности, надежности системы в отношении потерь межканальной связи, чтобы иметь возможность надежно локализовать аномалии и обеспечивать изоляцию только неисправного канала. 10 з.п. ф-лы, 5 ил.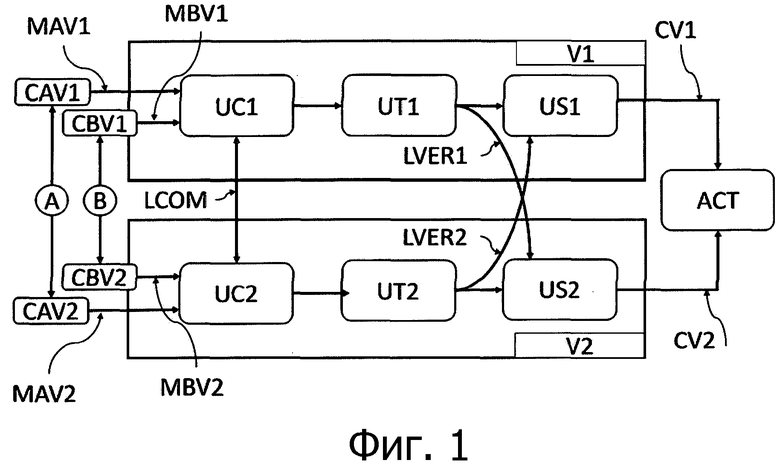
1. Устройство управления авиационным двигателем типа турбореактивного двигателя, содержащее первый канал (V1) управления и второй канал (V2) управления, при этом каждый канал управления содержит первый датчик (CAV1, CAV2) и второй датчик (CBV1, CBV2), каждый из которых выполнен с возможностью выдавать соответственно первое измерение (А) и второе измерение (В) в каждый из каналов, причем каждый из каналов имеет активное или пассивное состояние, определяющее активный канал (V1) или пассивный канал (V2), при этом активный канал (V1) предназначен для управления по меньшей мере одним приводом (АСТ) двигателя, тогда как пассивный канал (V2) предназначен для замещения активного канала в случае неисправности последнего, при этом указанное устройство выполнено таким образом, что каждый канал (V1, V2) содержит:
- объединяющий блок (UC1, UC2), предназначенный для объединения измерений, причем каждый блок принимает на входе измерения, поступающие от двух каналов по меньшей мере через одну межканальную линию связи (LCOM), так чтобы получить объединенный параметр,
- вычислительный блок (UT1, UT2), предназначенный для вычисления по меньшей мере одной команды (CV1, CV2) по меньшей мере одного привода (ACT) двигателя, при этом устройство имеет:
- номинальный режим работы, в котором указанный вычислительный блок (UT1, UT2) каждого канала (V1, V2), блок первого канала и блок второго канала, вычисляет команду (CV1, CV2) в зависимости от указанного объединенного параметра и от команды, вычисленной в предыдущий момент вычислений, при этом приводом управляет активный канал,
- аварийный режим работы при разрыве указанной линии связи (LCOM), в котором указанный вычислительный блок (UT2) пассивного канала вычисляет команду (CV2) в зависимости от команды (CV1), вычисленной активным каналом (V1) в предыдущий момент вычислений.
2. Устройство управления двигателем по п. 1, в котором каждый канал (V1, V2) дополнительно содержит блок (US1, US2) мониторинга процессов, выполненный с возможностью обнаруживать различие между значениями команд (CV1, CV2), вычисляемых двумя каналами (V1, V2).
3. Устройство управления двигателем по п. 2, в котором блок (US1, US2) мониторинга процессов выполнен с возможностью отключить временно или окончательно пассивный канал (V2) в случае обнаружения различия между значениями команд (CV1, CV2), вычисленных двумя каналами (V1, V2).
4. Устройство управления двигателем по любому из предыдущих пунктов, в котором объединяющий блок (UC1, UC2) выполнен с возможностью определения среднего из значений, измеряемых двумя каналами (V1, V2).
5. Устройство управления двигателем по любому из предыдущих пунктов, в котором вычислительный блок (UT1, UT2) каждого канала (V1, V2) выполнен с возможностью выполнения вычисления, требующего по меньшей мере одного результата, вычисленного самим блоком на предшествующем временном шаге.
6. Устройство управления двигателем по любому из предыдущих пунктов, в котором вычислительный блок (UT1, UT2) каждого канала выполнен с возможностью выполнения вычисления, требующего по меньшей мере одного промежуточного результата, вычисленного самим блоком на предшествующем шаге вычислений.
7. Устройство управления двигателем по п. 5, в котором аварийный режим работы активируется на период времени, соответствующий продолжительности разрыва указанной по меньшей мере одной межканальной линии связи (LCOM).
8. Устройство управления двигателем по п. 6, в котором аварийный режим работы активируется на период времени, соответствующий времени между вычислением промежуточного значения и наиболее удаленным моментом времени, в течение которого при вычислениях используется это значение в качестве исходных данных.
9. Устройство управления двигателем по любому из предыдущих пунктов, в котором аварийный режим работы активируется на заранее определенный период времени, оцениваемый при помощи тестов на неисправность линии связи.
10. Устройство управления двигателем по любому из пп. 2-9, в котором блок (US1, US2) мониторинга процессов выполнен с возможностью окончательного отключения пассивного канала (V2) в случае обнаружения различия между значениями команд, вычисленных двумя каналами (V1, V2) сразу после завершения аварийного режима работы.
11. Устройство управления двигателем по любому из предыдущих пунктов, в котором, когда один из двух каналов (V1, V2) ожидает получения измерений от другого канала, указанный другой канал (V1, V2) заранее осуществляет последующие предусмотренные вычисления, не требующие измерений от второго канала, которые он в этот момент не имеет.
| FR 2986398 A1, 02.08.2013 | |||
| Установка для окраски изделий | 1978 |
|
SU724218A1 |
| FR 3038709 A1, 13.01.2017 | |||
| ВКУСОВОЙ ПРОДУКТ | 2017 |
|
RU2734925C2 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТА ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2151714C1 |
| US 5144230 A1, 01.09.1992 | |||
| УСТРОЙСТВО ДЛЯ ВЫДАЧИ РАЗРЕШЕНИЯ ДЛЯ ВОЗДЕЙСТВИЯ НА РАБОЧИЙ РЕЖИМ ДВИГАТЕЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ, СОДЕРЖАЩАЯ ЕГО | 2005 |
|
RU2353549C1 |
