Настоящее изобретение относится к способу и контрольному устройству для оптического контроля поверхности объекта, а также к преимущественному использованию способа и контрольного устройства. При использовании данного способа периодическую по времени схему с разными схемами освещения генерируют на поверхности во время последовательности регистрации изображений при помощи осветительного устройства контрольного устройства. В/во время последовательности регистрации изображений несколько изображений схемы на поверхности регистрируют посредством устройства регистрации изображений контрольного устройства.
Во время этого процесса генерирование одной из разных схем освещения синхронизируется соответственно с регистрацией изображения в отношении одного из изображений схемы таким образом, что каждое изображение из последовательности регистрации изображений соответственно регистрируют с известной схемой освещения из разных схем освещения. Другими словами, это означает, что точно одна схема освещения видна на каждом изображении, выданном камерой. Путем синхронизации регистрации изображений и генерирования схем достигают, в частности, отсутствия изменения схемы освещения в течение времени воздействия при регистрации изображений. Из непрерывного ряда зарегистрированных известных схем освещения определяют фазу в по меньшей мере одной точке изображения. Поскольку схема/периодически отличающиеся схемы освещения, относящиеся к схеме, известны, точку изображения можно связать с точкой известной схемы. Дефекты на поверхности обнаруживают по отклонениям схемы освещения, зарегистрированной в по меньшей мере одном изображении из сгенерированной известной схемы освещения. Дефекты на поверхности приводят к искажениям известной схемы/одной известной схемы освещения, зарегистрированной в одном изображении. Это позволяет идентифицировать и выводить дефекты посредством оценки изображения, в основном известной специалистам, с помощью подходящих алгоритмов, например с помощью соответствующим образом подходящего вычислительного устройства. Путем сканирования нескольких участков поверхности один за другим, т.е. путем многократного применения к разным участкам поверхностей можно произвести контроль всей поверхности или выбранных частей поверхности.
Во время контроля поверхности одна из важнейших задач заключается в обнаружении и классификации дефектов, которые благодаря своим топографическим характеристикам вызывают отражения света. Часто эти дефекты совсем не воспринимаются глазом как топографические дефекты, а лишь как изменения яркости или оттенков на поверхности. Часто контроль во время движения является необходимым или по меньшей мере преимущественным. Особенно предпочтительные применения для таких поверхностей в контексте настоящего изобретения будут описаны позже.
В принципе, способ согласно настоящему изобретению подходит для оптического контроля отражающих поверхностей. Отражающие поверхности в контексте настоящего изобретения включают как идеально отражающие (т.е. зеркальные) поверхности, так и поверхности, которые помимо отражающих свойств также проявляют определенный рассеивающий эффект. В этом случае критерием является то, что поверхность, освещенная схемой (также включая схему, проецируемую на поверхность), является оптически регистрируемой в изображении.
Давно принятым способом контроля поверхностей является дефлектометрия. Она включает регистрацию изображения отражения известной схемы на поверхности посредством камеры и его оценку в компьютере. Дефекты поверхности приводят к искажениям схемы на поверхности, которые обнаруживаются. Если известны геометрия регистрации и геометрия схемы, это также можно использовать для определения трехмерной топографии поверхности. Специалистам известны различные способы того, как это выполняется. Они считаются известными в контексте настоящего изобретения и не будут подробно описаны.
Основной принцип дефлектометрии заключается в определении отражения луча света, падающего на поверхность, то есть в идентификации точки схемы, на которую падает визуальный луч, выходящий из камеры (устройства регистрации) и отображаемый на поверхности. Другими словами, отклонение визуального луча на поверхности определяется в отражении, которое зависит от направления нормали к поверхности (прямой, расположенной вертикально на поверхности в точке отражения) в соответствующем месте (точке отражения). Из определенного таким образом нормального поля затем можно определить топографию поверхности, например путем интеграции.
Распространенными способами установления местоположения точки являются так называемые способы фазовых сдвигов, в которых используемая схема является периодической схемой и определяют, в каком положении фазы схемы расположена определяемая точка.
Это в принципе отличается от способов, для которых достаточно одного изображения схемы или которые требуют нескольких изображений.
Преимущество способов, для которых достаточно одного изображения, заключается в том, что они также могут быть использованы на движущейся поверхности и, таким образом, кажутся изначально более подходящими для контроля, например, продукта в виде полотна или в производственных процессах. Однако их недостаток заключается в том, что они более восприимчивы к дефектам или требуют физического присутствия второй схемы на траектории пучка. В документе WO 98/17971 А1, например, описан способ обнаружения и определения наименьших отклонений пучка. По сути, в этом случае камера отслеживает схему в виде полосы. Для описанного способа достаточно одного изображения, так как пиксельная сетка камеры используется в качестве второй схемы. Однако в этом случае недостаток заключается в том, что камера и схема требуют очень точной настройки. В промышленной среде, например в производственных процессах, этого очень сложно достичь или можно достичь только с неоправданными затратами.
Способы, которые используют несколько изображений, существенно более устойчивы к дефектам и не требуют настройки, занимающей много времени. Схему отображают и регистрируют последовательно в нескольких положениях фазы, сдвинутых относительно друг друга. Особенно простой оценки достигают при использовании схемы в виде полосы с синусоидальной кривой яркости, который регистрируют четыре раза со сдвигом, соответственно равным четверти длины периода. Но возможны также другие схемы и непрерывные ряды схем. В таком случае из непрерывного ряда значений серого цвета в каждом пикселе получают положение фазы в схеме. Этот способ подробно описан в соответствующих учебниках и статьях (например, в Gorthi и Rastogi, «Fringe Projection Techniques: Whither we are?», Proc. Optics and Lasers in Engineering, том 48, №2, стр. 133-140, 2010 г.). Однако недостаток заключается в том, что необходимы несколько изображений одного и того же места поверхности. Однако при контроле пленок и другого продукта в виде полотна в производственном процессе/в основном поверхностей, движущихся относительно контрольного устройства, на практике невозможно сделать несколько снимков точно одного и того же места поверхности, так как поверхность постоянно движется. Например, полотна, которые движутся с большой скоростью, невозможно остановить во время производства. Эту задачу можно решить путем использования контрольного устройства, движущегося синхронно с полотном. Следует признать, что такое решение является технически сложным и, следовательно, дорогостоящим, а также требует много места, что часто невозможно обеспечить, особенно в производственной среде.
В документе ЕР 2390656 В1 раскрыт способ, в котором поверхность движущегося полотна отслеживают предпочтительно камерой с однострочной разверткой. Освещение состоит из освещения с быстро переключаемыми схемами (предпочтительно светодиодного освещения), установленного поперек полотна. Это освещение состоит из управляемых по отдельности светодиодов или светодиодных модулей, с помощью которых можно очень быстро динамически генерировать разные схемы освещения. Переключение и регистрация изображений синхронизированы, так что изображения поверхности с разными схемами освещения можно регистрировать в виде быстрого непрерывного ряда. В частности, сканирование и переключение можно выполнять так быстро, что расстояние между регистрациями изображений в направлении подачи намного меньше протяженности пикселя в направлении подачи. Таким образом, изображения можно регистрировать почти в одном и том же месте. Однако этот способ не обеспечивает регистраций точно в одном и том же месте.
Цель настоящего изобретения заключается в предоставлении надежного варианта контроля движущихся поверхностей, который, в частности, может быть реализован простым образом даже в промышленной среде, например в производственных процессах.
Согласно настоящему изобретению этой цели достигают с помощью способа согласно пункту 1 формулы изобретения и контрольного устройства согласно пункту 12 формулы изобретения.
В способе, описанном в начале, предусматривается, что осветительное устройство и устройство регистрации изображений расположены под углом отражения (соответственно относительно нормали к поверхности, вертикально выровненной на поверхности в зоне отражения). Выражение «под углом отражения» означает, что краевые лучи точки изображения (т.е. визуальные лучи, исходящие от края точки изображения) отражаются в точках отражения на поверхности и отмечают видимый участок схемы освещения (участок схемы) в точке изображения. Другими словами, отражение схемы освещения схемы на поверхности отображается точно в точках изображения устройства регистрации изображений. Камера (в качестве устройства регистрации), таким образом, направлена точно на схему (т.е. осветительное устройство, которое может быть выполнено, например, в виде осветительной линии).
На подвижном объекте угол отражения не изменяется при условии, что форма поверхности и ее расположение относительно неподвижного контрольного устройства не изменяется. Это верно для плоской поверхности или слегка искривленной поверхности, если кривизна в среднем является постоянной и направление нормали к поверхности (по меньшей мере относительно направления визуальных лучей) изменяется лишь незначительно. Например, это может иметь место в случае волнистой структуры поверхности, где изменение направления нормали к поверхности является небольшим. Выражение «небольшое» означает, что изменение лишь таково, что участок схемы остается видимым в точке изображения. Следовательно, участок схемы должен быть соответствующим образом широким в направлении подачи. Как только это становится невозможным, способ согласно настоящему изобретению не может применяться с неподвижным контрольным устройством. Однако в этом случае контрольное устройство согласно предложенному в настоящем изобретении способу может быть соответственно перемещено в отражающей компоновке по искривленной поверхности.
Поскольку из-за известной периодичности изменения направления нормали к поверхности возможно осуществлять механическое отслеживание контрольного устройства таким образом, что условия отражения соблюдаются или угол отражения находится в пределах области регистрации благодаря использованию планарного осветительного устройства и устройства регистрации, и точки изображения выбирают согласно периодически появляющемуся углу отражения, данный способ также можно применять для криволинейных поверхностей.
Независимо от этого настоящий способ можно применять для определения топологии дефектов при условии, что изменения схемы могут быть однозначно обнаружены контрольным устройством.
Для того, чтобы иметь возможность контроля больших участков поверхности или обеспечивать непрерывный контроль, например, во время производства согласно настоящему изобретению предусмотрено перемещение объекта и, таким образом, поверхности объекта во время контроля поверхности относительно контрольного устройства, предпочтительно в определенном/тщательно управляемом направлении движения.
Для способов фазовых сдвигов, описанных в начале, действительно необходимо, чтобы изображения, относящиеся к последовательности изображений, всегда регистрировали одно и то же место поверхности. Поскольку в этом случае производят контроль подвижной поверхности, такой как полотно материала, движущееся относительно устройства регистрации, это невозможно. Тем не менее, для того, чтобы иметь возможность применять данный способ и обнаруживать фазу схемы, длительность последовательности регистрации изображений выбирают достаточно короткой для того, чтобы зона отражения последовательности считалась постоянной. Зона отражения последовательности определяется как суммарный участок поверхности, охватываемый зонами отражения/зарегистрированный в соответствующих изображениях из последовательности регистрации изображений. Проще говоря, изображения последовательности регистрации изображений регистрируют один за другим с такой скоростью, что перемещение от первого до последнего изображения этой последовательности регистрации изображений настолько мало, что захваченный участок поверхности (зона отражения) по-прежнему может считаться практически одним и тем же местом поверхности.
Участок поверхности, охватываемый в совокупности зонами отражения в соответствующих изображениях из последовательности регистрации изображений, получают путем объединения всех зон отражения всех отдельных изображений, которые были зарегистрированы во время последовательности регистрации изображений, на общем участке, который в этом случае называется зоной отражения последовательности. В этом случае этот участок поверхности можно считать по меньшей мере приблизительно постоянным, если зоны отражения всех изображений из регистрации изображений перекрываются по меньшей мере на 40% или больше, предпочтительно по меньшей мере на 60%. Однако эти величины не следует понимать как фиксированные величины, а как обычные нормативные величины, которые специалист может адаптировать, возможно экспериментальным путем, к соответствующим условиям. В принципе, способы показывают хорошие результаты при условии, что благодаря оптическим условиям явно меньше одной длины периода схемы отображается на одну точку изображения. Вогнутая кривизна поверхности, которая из-за эффекта вогнутого зеркала отображает большие участки схемы на точку изображения, является особенно критичной. Для обнаружения дефектов площадь перекрытия от 40% до 70% должна быть достаточной, а при оценке нормали к поверхности (т.е. оценке топологии поверхности) достаточно площади перекрытия от 60% до 80%. В зависимости от формы поверхности и типа встречающихся дефектов также могут появляться другие участки, которые эксперт при настройке соответствующего контрольного устройства может определить и/или заранее определить на основании идеи настоящего изобретения, возможно эмпирическим путем с помощью экспериментальных измерений. Другими словами, согласно настоящему изобретению предложено выбирать длительность последовательности регистрации изображений таким образом, чтобы регистрировать изображения, зарегистрированные в пределах последовательности регистрации изображений в хронологическом порядке, так быстро один за другим, что траектория сдвига поверхности из-за перемещения объекта от первого изображения к последнему изображению последовательности регистрации изображений настолько мала, что зоны отражения первого изображения и последнего изображения могут считаться одним и тем же участком на поверхности. По сравнению с измерением, выполненным при остановке объекта, возникает погрешность измерения, которая тем меньше, чем лучше выполняется вышеуказанное условие.
Зона отражения на поверхности, которая захвачена в точке изображения (в минимальном разрешении, определенном пикселем камеры или, возможно, комбинацией нескольких пикселей камеры), предопределена геометрией регистрации (расстоянием, углом регистрации) и регистрирующей оптикой. Из-за размещения устройства регистрации и осветительного устройства под углом отражения относительно нормали к поверхности изменение угла одного из двух устройств соответственно необходимо воспроизвести также и для другого устройства. Это делает изменения угла отражения сравнительно затратными. То же самое касается соответственно изменений регистрирующей оптики. Размер зоны отражения и/или участка схемы, отображенной в зоне отражения, согласно настоящему изобретению можно изменять или регулировать сравнительно простым образом посредством расстояния до устройства регистрации и/или осветительного устройства. Следует признать, что это также требует изменения конструкции контрольного устройства.
Согласно настоящему изобретению на другие параметры легче влиять при выполнении способа, предложенного в настоящем изобретении. Далее будут описаны подходящие параметры при выполнении способа. Для того, чтобы адаптировать длительность последовательности регистрации изображений в зависимости от предварительно определенной скорости и направления движения объекта таким образом, чтобы зону отражения последовательности можно было считать постоянной, согласно предпочтительному варианту осуществления настоящего изобретения можно предпринимать одну или в совокупности больше мер, перечисленных ниже.
Таким образом, при выполнении способа согласно варианту осуществления настоящего изобретения можно предусмотреть установку размера точки изображения.
В простейшем случае размер точки изображения может соответствовать пиксельному разрешению камеры (используемой в качестве устройства регистрации изображений). Это представляет для заданного расстояния до камеры и предварительно определенного фокусного расстояния камеры наибольшее возможное разрешение. Чем выше разрешение камеры, тем меньше зона отражения, связанная с точкой изображения на поверхности и тем меньше дефекты, обнаруживаемые на поверхности. Один вариант изменения размера точки изображения заключается в изменении пиксельного разрешения камеры. Пиксельное разрешение камеры для цифровой регистрации изображений, предпочтительной согласно настоящему изобретению, предварительно определено микросхемой фотосъемки, используемой в качестве регистрирующего датчика камеры, на которой в течение времени воздействия отдельные пиксели (пиксели датчика) захватывают (интегрируют) свет, падающий на этот пиксель. Путем уменьшения разрешения размер точки изображения также можно получить путем объединения нескольких пикселей датчика камеры с образованием одной точки изображения. Также одна точка изображения может называться пикселем. Но пиксель изображения и пиксель датчика отличаются, если несколько пикселей датчика объединены с образованием одного пикселя изображения.
Согласно одному варианту осуществления установка размера точки изображения может быть выполнена путем объединения нескольких пикселей регистрирующего датчика (пикселей датчика) устройства регистрации с образованием одного пикселя изображения. В одном варианте количество объединяемых пикселей в направлении движения объекта и поперек направления движения объекта может быть выбрана различными путями согласно настоящему изобретению. Может быть целесообразно путем выбора меньшего разрешения увеличить размер зоны отражения в направлении движения объекта, чтобы получить большее покрытие зон отражения отдельных изображений соответственно в одной последовательности регистрации изображений. В результате зона отражения последовательности в направлении движения объекта увеличивается. В поперечном направлении к нему может поддерживаться более высокое разрешение. Разрешение поперек направления движения объекта и его поверхности определяется исключительно геометрией регистрации, т.е. по сути размером точек изображения (ограниченным размером пикселя регистрирующего датчика устройства регистрации изображений применительно к наименьшей возможной протяженности), фокусным расстоянием линзы и расстоянием обзора. Движение не влияет на разрешение поперек направления движения.
Размытость из-за движения возникает в продольном направлении движения. Из-за того, что камера во время регистрации изображений интегрирует весь свет в одной точке изображения (пикселе изображения, который не обязательно совпадает с пикселем регистрирующего датчика), который падает на эту точку изображения во время экспозиции, отслеживаемая поверхность, отображаемая на одну точку изображения, увеличивается в направлении движения. По отношению к движущейся поверхности (также называемой зоной отражения, связанной с точкой изображения) точка изображения кажется, так сказать, растянутой в длину. Выражения «продольный» и «поперек» относятся в данном контексте к направлению движения и не обязательно должны совпадать с направлением строк и столбцов камер. Для непрямого угла обзора каждый пиксель кажется наклонно растянутым соответствующим образом относительно направления строк и столбцов камеры.
В непрерывном ряду изображений (во время последовательности регистрации изображений), которая зарегистрирована для способа фазовых сдвигов нескольких изображений, одно и то же место на поверхности действительно должно быть отображено в каждой точке изображения (пикселе изображения) во всех изображениях. Однако при регистрации нескольких изображений один за другим они по отношению к движущейся поверхности сдвигаются относительно друг друга. Следовательно, чтобы компенсировать это, согласно настоящему изобретению принимаются меры, которые могут привести к отслеживанию зоны отражения разных изображений в качестве приблизительно одного и того же места на поверхности. Изменение размера точки изображения может способствовать этому вышеописанным образом.
Согласно настоящему изобретению дополнительная мера может заключаться в установке длительности последовательности регистрации изображений во время выполнения способа. Длительность последовательности регистрации изображений, т.е., другими словами, время, необходимое для регистрации всех изображений одной последовательности регистрации изображений, определяет для предварительно определенной скорости движения объекта/поверхности то, насколько далеко участок поверхности, соответствующий зоне отражения первого изображения, сдвигается вплоть до регистрации последнего изображения. Из этого следует размер зоны отражения последовательности и перекрытие, которое должно быть установлено согласно настоящему изобретению, зон отражения отдельных изображений. В основном можно сказать, что чем больше перекрытие, тем меньше длительность последовательности регистрации изображений.
Помимо ограничений максимальной частоты сканирования регистрирующего датчика и наименьшего возможного времени воздействия устройства регистрации, можно адаптировать частоту сканирования (определенную как частота последовательных регистраций изображений) и/или время воздействия. Чем меньше время воздействия, тем больше резкость регистрируемого изображения (снижение размытости из-за движения) и тем быстрее изображения могут быть последовательно зарегистрированы (скорость сканирования). Сокращения времени воздействия можно достичь путем увеличения яркости схемы, генерируемой на поверхности, и/или открытия диафрагмы регистрирующей оптики. Путем увеличения яркости/увеличения открытия диафрагмы (обычно определенного меньшими числовыми значениями диафрагмы в оптике) можно сократить время воздействия. Следовательно, имеет смысл использовать осветительное устройство с высокой, но регулируемой интенсивностью света.
Подходящие осветительные устройства могут быть выполнены из светодиодов с индивидуально регулируемой яркостью, которые при индивидуальной регулировке яркости позволяют создавать схему, а при совместной регулировке яркости позволяют регулировать общую интенсивность света. В основном может быть предпочтительно эксплуатировать осветительное устройство с максимальной интенсивностью света и уменьшать время воздействия, пока не будут зарегистрированы изображения, подвергаемые воздействию подходящим образом.
Следовательно, согласно настоящему изобретению при регулировке длительности последовательности регистрации изображений может быть адаптирована по меньшей мере одна из переменных, перечисленных ниже: время воздействия изображения, яркость схемы, генерируемой на поверхности, частота сканирования регистрирующего датчика и/или количество изображений на последовательность регистрации изображений. Также можно адаптировать все или несколько переменных.
Разумеется, как таковую длительность последовательности регистрации изображений также можно изменять согласно настоящему изобретению путем изменения количества изображений на последовательность регистрации изображений, при этом уменьшение последовательности регистрации изображений может быть достигнуто путем уменьшения количества изображений, и наоборот.
Кроме того, согласно настоящему изобретению на чувствительность измерения можно влиять путем выбора расстояния освещения (одновременно также рассматривая расстояние между устройством регистрации и схемой) и угла обзора. Большие расстояния, как и более плоские углы обзора (т.е. более плоские относительно поверхности; вертикально к поверхности будет максимально крутым) приводят к более высокой чувствительности. В частности, при частично отражающих поверхностях как зеркальным, так и отражающим образом, может быть особенно предпочтительно выбрать более плоский угол обзора и освещения (например <30°) и/или максимальное расстояние освещения. Согласно настоящему изобретению максимальное расстояние освещения может означать, что доступное пространство используют для размещения осветительного устройства. Расстояние освещения (расстояние между осветительным устройством и поверхностью) может быть, например, выбрано большим, чем расстояние между устройством регистрации и поверхностью, при этом обычные значения могут находиться в диапазоне от однократной величины до, например, десятикратной величины. Специалист выбирает значения, возможно, экспериментально адаптированные к соответствующему случаю применения, при этом согласно основной идее настоящего изобретения чувствительность во многих случаях увеличивается за счет меньших углов освещения и углов обзора и/или большего расстояния освещения (между устройством регистрации и осветительным устройством).
Цель регистрации нескольких изображений заключается в определении фазы схемы, чтобы по ней идентифицировать положение известной схемы освещения в зарегистрированной точке изображения. Это позволит обнаруживать дефекты в поверхности по искажениям схемы на поверхности. Согласно одному варианту осуществления может быть зарегистрировано, например, три изображения. Например, можно периодически придавать генерируемой схеме асимметричную форму, так что фазу схемы можно однозначно определять по трем изображениям. В качестве альтернативы, схеме также можно периодически придавать симметричную форму, при этом регистрируя изображения асимметрично, например путем изменения частоты сканирования/регистрации изображений между разными изображениями в пределах одной и той же последовательности регистрации изображений.
Однако одно применение, предпочтительное согласно настоящему изобретению, предусматривает сканирование с по меньшей мере или ровно четырьмя изображениями в пределах одной и той же последовательности регистрации изображений. Собственно схема может представлять собой, например, синусоидальное распределение яркости, которое регистрируют в идентичной последовательности сканирования в четырех разных положениях фазы. Из этого можно простым и точным образом определить фазу схемы в каждом из изображений. Например, фазовый сдвиг между положениями фазы в последовательности регистрации последовательных изображений может составлять всего лишь Уа длины периода схемы. Но также возможны другие фазовые сдвиги между изображениями последовательности регистрации изображений.
Согласно дополнительному аспекту настоящего изобретения схема освещения может генерироваться осветительным устройством таким образом, чтобы видимый участок схемы освещения, регистрируемый в точках изображения, относящихся к изображениям, регистрируемым во время соответственно одной последовательности регистрации изображений, можно было считать постоянным.
Участок схемы освещения (участок схемы), видимый в точках изображения во время последовательности регистрации изображений, можно считать постоянным при условии, что этот участок схемы остается все еще видимым в точке изображения и регистрируемая интенсивность участка схемы не изменяется значительно. Это можно предположить, например, если регистрируемая интенсивность во время последовательности регистрации изображений изменяется не более чем на 10%, предпочтительно не более чем на 8% и особенно предпочтительно не более чем на 4%, или поддерживается другой определенный критерий. В этом случае также применимы в основном критерии, уже рассмотренные выше.
В связи с этим, согласно предпочтительному аспекту настоящего изобретения длина периода схемы в схеме освещения может быть выбрана таким образом, чтобы в зависимости от топологии поверхности в направлении хода схемы изменение интенсивности можно было считать в достаточной мере постоянным, другими словами, это означает, что изменение интенсивности не превышает критерий, подходящий для соответствующих обстоятельств. Выбор критерия может быть определен специалистом, возможно, экспериментальным путем при установке системы и конкретных схем.
Топология поверхности определяется, в частности, ее кривизной, что влечет изменение направления нормали к поверхности. Направление нормали к поверхности соотносится с углом отражения. Поэтому посредством топологии поверхностей, которые необходимо исследовать с помощью способа согласно настоящему изобретению, возможно определить по итоговому углу отражения для известного расположения контрольного устройства, какой участок схемы освещения отображен в точке изображения в течение определенной длительности последовательности регистрации изображений. Путем предварительного определения длины периода можно уточнить схему освещения таким образом, чтобы соответствовать вышеупомянутым критериям. Следовательно, способ можно гибко применять для определенных задач контроля.
Согласно дополнительному аспекту способа, предложенного согласно настоящему изобретению, может быть предусмотрено генерирование периодической схемы вдоль направления движения объекта, поперек направления движения объекта или поочередно вдоль и поперек направления движения объекта.
Когда схема находится вдоль направления движения объекта, уже рассмотренные размытость из-за движения и сдвиг зоны отражения для подвергаемой контролю изогнутой поверхности будут перекрываться со сдвигом участка схемы, рассматриваемом через точку изображения, из-за изменения угла отражения и с изменением интенсивности по этой же причине, так как интенсивность схемы изменяется в этом направлении.
Для схемы поперек направления движения зона отражения также изменяется. Однако так как схема вдоль направления сдвига объекта имеет такую же интенсивность, изменение угла отражения не обязательно приводит к изменению интенсивности. Интенсивность, измеренная в точке изображения, остается одинаковой при условии, что точка изображения захватывает один и тот же участок схемы и кривизна поверхности не приводит к сдвигу участка схемы, захваченного в точке изображения, поперек направления движения.
Согласно настоящему изобретению эту разницу можно учитывать во время вышеописанной адаптации длины периода схем в зависимости от выравнивания схемы вдоль или поперек направления движения объекта. Длина периода схемы, в частности для схем, расположенных вдоль и поперек направления движения, согласно настоящему изобретению особенно предпочтительно может быть разной.
Кроме того, известную кривизну поверхности объекта на определенном участке поверхности, который необходимо подвергнуть контролю, также можно использовать согласно настоящему изобретению для уточнения подходящих критериев, чтобы отличать поверхность без дефектов от поверхности с дефектами и/или чтобы исправлять отклонение, вызванное известной (ожидаемой) формой поверхности в оценке регистрируемых изображений как часть обнаружения дефектов.
Из-за генерирования схем поочередно вдоль и поперек направления движения разные дефекты, в частности направленные дефекты в поверхности, можно систематически захватывать более надежным образом.
В одном варианте осуществления способа, предложенного согласно настоящему изобретению, устройство регистрации может быть сфокусировано таким образом, чтобы схема освещения, регистрируемая в изображении, была размытой.
Этого можно достигнуть, например, путем фокусировки устройства регистрации не на схеме, а на поверхности или другой определенной точке. Путем предварительного определения конкретных настроек диафрагмы и фокуса глубину фокуса/глубину поля также можно выбирать выборочно согласно настоящему изобретению, чтобы отображать схему освещения в изображении таким образом, чтобы он был размытым, но поверхность была в фокусе. В результате этого резкое распределение яркости выглядит размытым. Таким образом, например, резкую схему, состоящую просто из чередующихся разделяемых светлых/темных участков, можно отобразить как приблизительно синусоидальную кривую яркости. В этом случае можно использовать особенно простое осветительное устройство без необходимости в дополнительных оптических элементах для генерирования желаемой кривой яркости. Помимо этого, распределение яркости становится менее резким, что, в частности, может иметь положительный эффект на изогнутых поверхностях, а также связанные с этим эффекты, когда сдвинутые участки схемы отображаются на изображения, регистрируемые в последовательности регистрации изображений.
Во многих случаях поверхность, которая должна быть подвергнута контролю, не является идеально зеркальной, а отражает полудиффузно. Хотя отражение является направленным, оно рассеивается под относительно большим пространственным углом, что означает, что двумерная функция распределения отражательной способности (BRDF) обладает группой рассеивания средней ширины. Это также приводит к довольно полезному размытию распределения яркости схемы в изображениях при условии, что группа рассеивания остается настолько узкой, чтобы приводить к достаточной модуляции зеркально отраженной схемы в изображении, полученном камерой, и, возможно, работать с помощью отражающей, хотя и не идеально зеркальной, поверхности. Такое свойство поверхности также можно использовать для достижения эффекта, подобного эффекту, достигаемому посредством описанной несфокусированной установки камеры на схеме. Однако такой (дополнительный) эффект необходимо учитывать по время несфокусированной установки, так как часть размытия (желательного в этом случае) в любом случае создается самой поверхностью.
С другой стороны, поверхность должна быть достаточно зеркальной, чтобы все еще позволять наблюдать за схемой. Следовательно, для поверхностей с относительно небольшим зеркальным отражением преимущественно выбирать угол обзора и освещения, который является как можно более плоским, и увеличивать расстояние освещения.
Может быть особенно преимущественным, если во время контроля поверхности, выполняемого согласно настоящему изобретению с помощью процессов дефлектометрии, определяют трехмерную топографию поверхности объекта. Если известны геометрия регистрации и геометрия схемы, как в способе, предложенном согласно настоящему изобретению, то также можно определить 3D-топографию поверхности. Известно несколько вариантов выполнения этой задачи. В дефлектометрии определяют отклонение луча света, падающего на поверхность, посредством определения точки схемы, на которую падает визуальный луч, излучаемый камерой (устройством регистрации) и зеркально отображаемый (отражаемый) на поверхности. Следовательно, определяют отклонение визуального луча, которое зависит от нормали к поверхности в соответствующем месте. Из созданного таким образом нормального поля поверхности можно определить топографию поверхности, например путем интеграции.
Особенно предпочтительное использование вышеописанного способа или его частей и/или контрольного устройства, описанного ниже в данном документе, является результатом контроля продукта в виде полотна, например, в производственном процессе или после его изготовления, или, в частности, обработанных, изогнутых или плоских поверхностей.
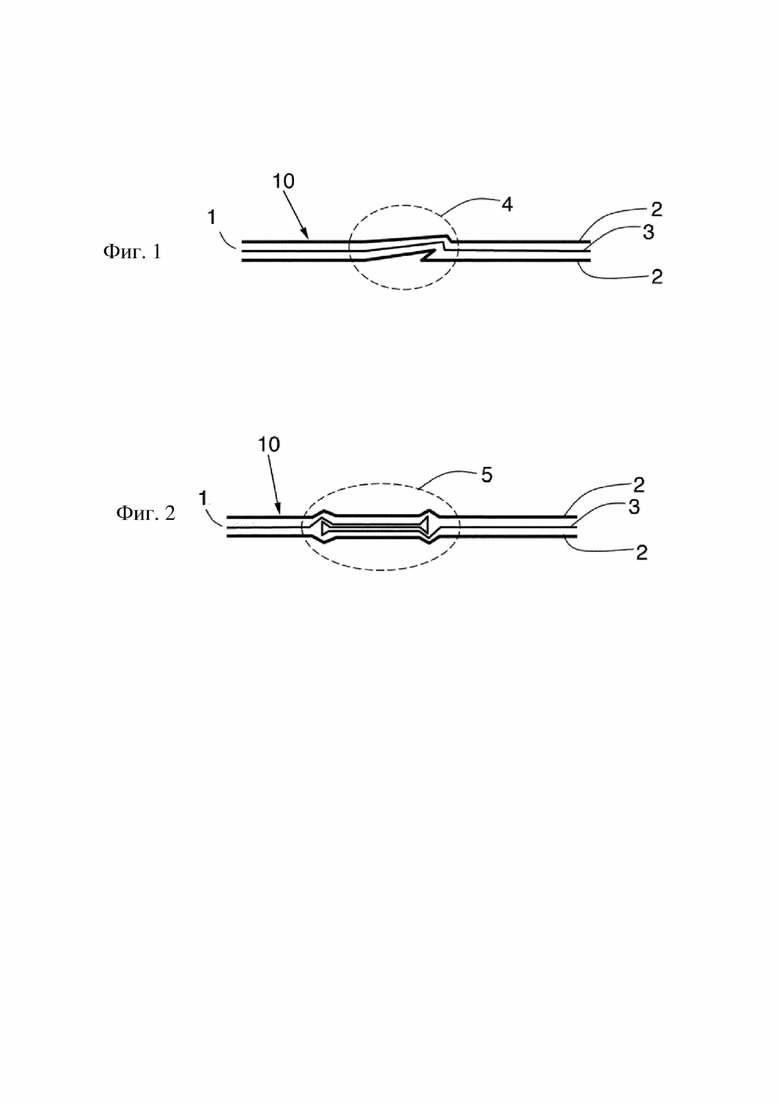
Важным конкретным типичным примером является контроль пленки FCCL во время или после производства. Пленки FCCL (гибкий слоистый пластик с медной фольгой) являются ключевым материалом для изготовления гибких печатных плат. Пленки FCCL обычно имеют толщину приблизительно 100 150⋅μм и содержат, например, полиамидную сердцевину (обычно пластиковую пленку), которая ламинирована на одной или обеих сторонах поверхности медной пленкой. Во время ламинирования могут быть образованы складки, которые необходимо обнаружить с помощью способа, предложенного согласно настоящему изобретению. Во время контроля поверхности также может быть желательно обнаруживать дефекты ламинирования, в частности так называемые складки 4 ламинирования (как схематически изображено на фиг. 1) или внутренние складки 5 (как схематически изображено на фиг. 2). В случае складок ламинирования на материале образовались небольшие складки, которые затем были снова спрессованы в процессе ламинирования. Внутренние складки образуются из складок во внутренней пластиковой пленке, которые были ламинированы.
Оба вида дефектов очень трудно обнаружить невооруженным глазом, так как пленки являются очень тонкими и, следовательно, складки не оказывают большого влияния на поверхность. Дефекты обнаруживают только при наблюдении за непосредственным отражением света на поверхности пленок. Это усугубляется тем, что медная пленка отражает полудиффузно. В случае других ламинированных пленок важен внешний вид, на который негативно влияют такие дефекты, несмотря на небольшую топографическую характеристику.
При контроле изогнутых поверхностей, например таких как окрашенные контейнеры или кузовы автомобилей, контрольное устройство программируют согласно предпочтительному варианту осуществления, например, посредством соответствующего блока обработки, и направляют по изогнутой поверхности таким образом, что и осветительное устройство, и устройство регистрации удерживаются под углом отражения к поверхности. В этом случае контрольное устройство перемещают таким образом относительно в основном неподвижного объекта. Это создает движение объекта/поверхности объекта относительно контрольного устройства. Как и ранее в этом описании, на этот тип относительного движения ссылаются при упоминании объекта, движущегося относительно контрольного устройства. Важнее всего как можно чаще находить наименьшие плоские топографические дефекты на поверхностях, изогнутых таким образом, которые могут негативно влиять на внешний вид или функцию поверхности. Часто полезно также измерять такие дефекты трехмерным образом, т.е. определять 3D-топологию поверхности и дефекта.
Настоящее изобретение также относится к контрольному устройству для оптического контроля поверхности объекта, а также к его использованию для вышеописанных применений. Контрольное устройство оснащено осветительным устройством и устройством регистрации, которые выровнены относительно друг друга таким образом, что визуальный луч, исходящий из устройства регистрации, падает на осветительное устройство как визуальный луч, отраженный от поверхности, тогда, когда нормаль к поверхности, расположенная вертикально на поверхности в месте падения визуального луча, делит пополам угол между выходящим визуальным лучом и отраженным визуальным лучом. Поэтому, другими словами, устройство регистрации и осветительное устройство контрольного устройства расположены под углом отражения относительно поверхности. Осветительное устройство выполнено с возможностью генерирования периодической по времени схемы с разными схемами освещения во время последовательности регистрации изображений, а устройство регистрации выполнено с возможностью регистрации изображений схем, отражаемых на поверхности, синхронно с генерированием схем освещения во время последовательности регистрации изображений. Контрольное устройство дополнительно содержит вычислительный блок для управления контрольным устройством и для оценки регистрируемого изображения, при этом процессор вычислительного блока выполнен с возможностью выполнения вышеупомянутого способа или его частей.
Согласно предпочтительному варианту осуществления контрольного устройства, предложенного согласно настоящему изобретению, осветительное устройство содержит индивидуально управляемые световые элементы, расположенные рядами или в виде матрицы. Также предпочтительно устройство регистрации может содержать регистрирующий датчик для регистрации изображений, отображаемых на регистрирующем датчике посредством регистрирующей оптики, при этом регистрирующий датчик содержит отдельные пиксели датчика (пиксели камеры), расположенные рядами или в виде матрицы.
Осветительное устройство может быть выполнено, например, в виде осветительной линии, которая предпочтительно расположена поперек или вдоль направления подачи (направления движения объекта/поверхности относительно контрольного устройства). Осветительная линия, состоящая из индивидуально управляемых осветительных элементов, расположенных в линию, может состоять из нескольких светодиодов, расположенных рядом друг с другом, или из светодиодных модулей, которые можно индивидуально переключать синхронно с регистрацией изображений. Осветительное устройство используют для генерирования в виде быстрого непрерывного ряда периодических схем, необходимых для процесса фазового сдвига. Устройство регистрации также может быть выполнено, например, в виде камеры с однострочной разверткой, которая также может быть собрана при необходимости из нескольких модулей камеры с однострочной разверткой, расположенных рядом друг с другом. При таком расположении образованное поле изображения камеры с однострочной разверткой представляет собой линию на поверхности (так называемую линию сканирования). Эта линия сканирования может быть выровнена поперек направления относительного движения поверхности и имеет также в направлении движения некоторую очень малую ширину по сравнению с ее длиной (проходящей поперек направления движения), которая зависит от пиксельного разрешения камеры с однострочной разверткой.
Осветительная линия может быть настолько длинной (поперек направления движения), чтобы охватывать всю ширину подвергаемого контролю полотна (или желаемого участка контроля на поверхности) под углом отражения. Когда камера и освещение расположены на одинаковом расстоянии от поверхности, осветительная линия с каждой стороны должна быть длиннее приблизительно на половину ширины линии сканирования отдельной камеры с однострочной разверткой, чем линия сканирования на поверхности, которая видна всем камерам, и для других расстояний это должно быть больше или меньше в зависимости от конкретного случая.
Ширина осветительной линии (в направлении движения) может определять максимальный угол к поверхности, который все еще поддается измерению при таком расположении. Если угол к поверхности становится больше максимального угла к поверхности, визуальный луч камеры, отражаемый поверхностью, больше не падает на освещение и камера ничего не видит.
Данный способ также подходит для использования с камерой со строчно-кадровой разверткой (матричным расположением). В этом случае линия сканирования становится полем изображения, так как ширина в направлении движения становится существенно больше. Ширина осветительной линии также может соответственно увеличиваться в направлении движения. В одном варианте вместо осветительной линии может быть использована осветительная матрица. Она состоит из нескольких отдельных светодиодов или светодиодных модулей, которые расположены в виде нескольких плавно соединенных осветительных линий, все из которых являются переключаемыми независимо друг от друга синхронно с регистрацией изображений. Таким образом, также можно простым образом изменять ширину осветительной линии, так что несколько осветительных линий переключаются одинаково.
Осветительная матрица может использоваться для переключения не только схем поперек направления полотна, но и схем вдоль направления полотна. Причина, по которой это является преимуществом, заключается в том, что процессы дефлектометрии в основном измеряют углы к поверхности/нормали к поверхности, а именно в направлении периодической схемы. Таким образом, при использовании осветительной линии можно измерить только углы поперек направления движения, в то время как при использовании осветительной матрицы можно измерить все направления, предпочтительно два направления: вдоль и поперек направления движения.
На графических материалах:
на фиг. 1 показано схематическое изображение в разрезе объекта с подвергаемой контролю поверхностью, содержащей первый типичный дефект;
на фиг. 2 показано схематическое изображение в разрезе объекта по фиг. 1 с подвергаемой контролю поверхностью, содержащей второй типичный дефект;
на фиг. 3а показан вид сверху контрольного устройства согласно варианту осуществления настоящего изобретения для контроля плоской поверхности;
на фиг. 3b показан вид сбоку контрольного устройства по фиг. 3a.
Объект 1, изображенный на фиг. 1 и 2, поверхность 10 которого подлежит контролю контрольным устройством согласно настоящему изобретению, представляет собой пленку FCCL, используемую в качестве сырья для печатных плат. Это ламинированная пленка 1, состоящая из трех слоев, причем средняя пластиковая пленка 3 служит средним слоем, на который ламинированы внешние медные пленки 2. Поверхность 10 объекта 1 обычно подвергают контролю на наличие дефектов поверхности.
Этот контроль поверхности также используется для обнаружения дефектов ламинирования, в частности так называемых складок 4 ламинирования (фиг. 1) и внутренних складок 5 (фиг. 2). В случае складок 4 ламинирования на материале образовались небольшие складки, которые затем были снова спрессованы в процессе ламинирования. Внутренние складки 5 образуются из-за складок, которые образовались во внутренней пластиковой пленке 3, которые были ламинированы.
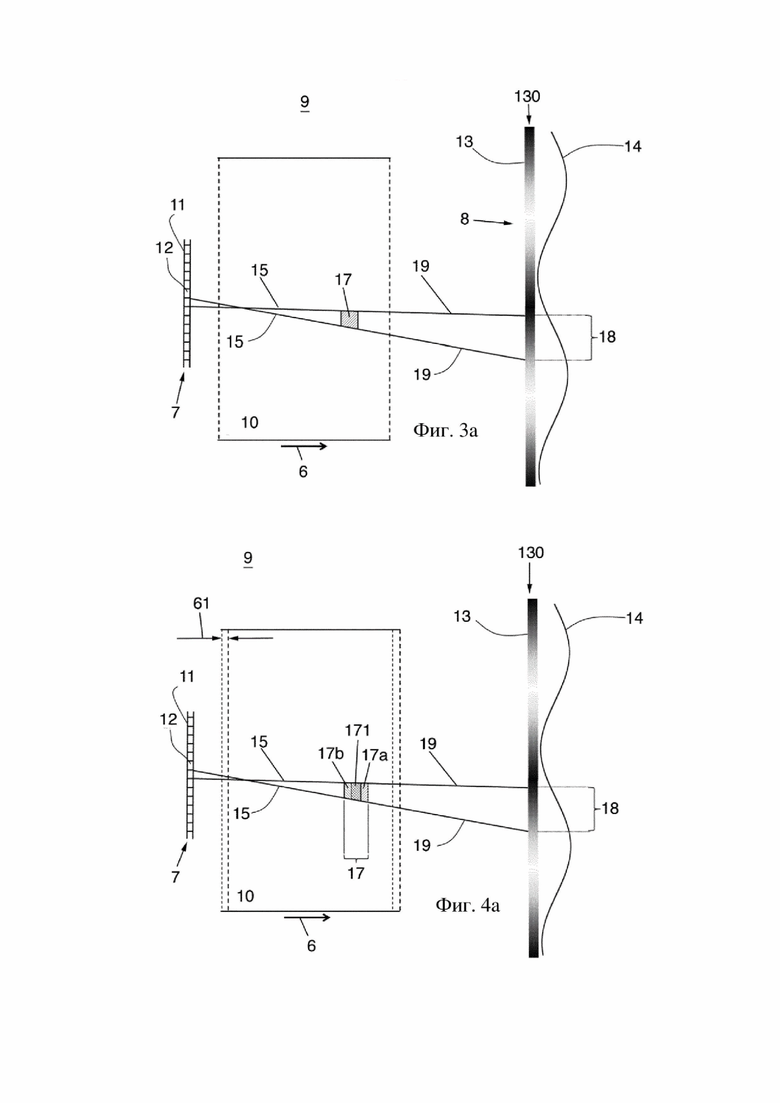
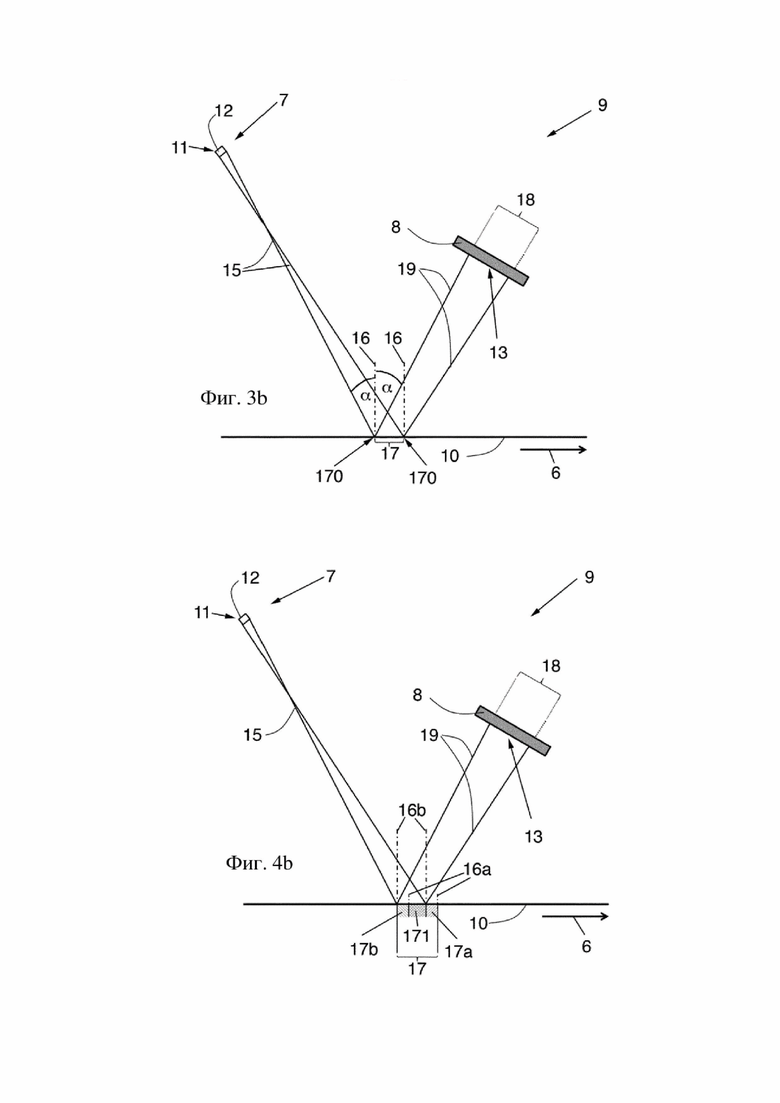
На фиг. 3b показан вид сбоку контрольного устройства 9 с осветительным устройством 8 и устройством 7 регистрации. На осветительном устройстве 8 изображена периодическая по времени схема 13 с разными схемами 130 освещения, которая освещает поверхность 10 объекта 1 (см. также вид сверху на фиг. 3а). Схема 130 освещения содержит распределение 14 яркости. Это также приводит к генерированию схемы 13 на поверхности 10. Устройство 7 регистрации регистрирует схему 13 на поверхности 10 в изображении.
Устройство 7 регистрации также содержит регистрирующий датчик 11, который генерирует изображение с несколькими точками 12 изображения. Благодаря оптике устройства регистрации, которая не изображена, визуальные лучи 15, исходящие из (каждой) точки 12 изображения, отражаются на поверхности 10 и падают в виде отраженных визуальных лучей 19 на осветительное устройство 8 на схему 13, сгенерированную в нем. Краевые лучи этих визуальных лучей 15, 19 графически нанесены на фиг. 3b. Краевые лучи исходят из краев точки 12 изображения и ограничивают зону 17 отражения на поверхности 10. Все визуальные лучи 15, исходящие из точки 12 изображения под углом отражения а и падающие на поверхность, лежат в зоне 17 отражения на поверхности 10 и также отражаются под углом отражения а от поверхности в виде отраженных визуальных лучей 19. Они падают на осветительное устройство 8 на участке 17 схемы, поскольку согласно предложенному в настоящем изобретении расположению устройство 7 регистрации и осветительное устройство 8 расположены под углом отражения а относительно поверхности 10.
Угол отражения а определяется как угол между падающими визуальными лучами 15, 19 (исходящими из точки 12 изображения)/отходящими (отраженными от поверхности 10) и связанной нормалью 16 к поверхности. Нормаль 16 к поверхности, принадлежащая визуальному лучу 15, 19, проходит вертикально к поверхности в точке 170 отражения, в которой визуальные лучи 15,19 падают на поверхность 10.
На фиг. 3а конкретно показана линия регистрирующего датчика 11 устройства 7 регистрации, которая проходит вдоль ширины поверхности 10, такой как продукт в виде полотна, движущийся в направлении движения в качестве объекта 1, такого как пленка FCCL. Устройство 7 регистрации может быть выполнено в виде камеры с однострочной разверткой, имеющей только одну сенсорную линию регистрирующих датчиков 11, или в виде камеры со строчно-кадровой разверткой с несколькими такими сенсорными линиями. Точка 12 изображения может быть образована из одного или нескольких пикселей датчика. Посредством оптики, которая не изображена, точка 12 изображения устройства регистрации (камеры) захватывает зону 17 отражения на поверхности 10. Визуальные лучи 15 отклоняются на поверхности 10 и захватывают участок 18 схемы, который образован площадью схемы 13/соответствующей схемы 130 освещения схемы 13 в момент регистрации изображений. В примере, изображенном на фиг. 3а и 3b, осветительное устройство выполнено в виде осветительной линии, выровненной поперек направления 6 движения поверхности 10.
На фиг. 3b показан вид сбоку того же самого расположения, на котором четко различимо отражение визуальных лучей 15, 19 (графически нанесенных в виде краевых лучей, как на всех фигурах) с углом отражения а относительно нормали 16 к поверхности. Графически нанесенные краевые лучи визуальных лучей 15, 19 наглядно представляют размер/площадь зоны 17 отражения на поверхности 10 и участка 18 схемы в схеме 13.
На фиг. 3а и 3b показано состояние во время регистрации изображений, при этом предполагается, что движением поверхности 10, движущейся в направлении движения, можно пренебречь при коротком времени воздействия во время регистрации изображений. Если это не так, то зарегистрированные изображения демонстрируют некоторую размытость из-за движения, которой можно противодействовать путем сокращения времени воздействия (при условии, что освещение достаточно яркое).
Как уже было описано, несколько изображений регистрируют в хронологическом порядке с помощью способа согласно настоящему изобретению во время последовательности регистрации изображений. Так как поверхность движется во время последовательности регистрации изображений в направлении 6 движения, точка 12 изображения больше не видит один и тот же участок поверхности в соответствующей зоне 17 отражения последовательно регистрируемых изображений. Вместо этого зоны 17 отражения на поверхности 10 сдвигаются относительно друг друга в последовательно регистрируемых изображениях.
Это изображено на фиг. 4а и 4b, на которых графически нанесен сдвиг 61 поверхности 10 между первой и последней регистрацией изображений в последовательности регистрации изображений. Зона 17а отражения графически нанесена в качестве зоны отражения первой регистрации изображений, и зона 17b отражения графически нанесена в качестве зоны отражения последней регистрации изображений из последовательности регистрации изображений, каждая из которых изображена в виде штриховки, повернутой на 90°. На перекрывающемся участке две штриховки накладываются друг на друга. Вся зона 17 отражения во всех изображениях последовательности регистрации соответствующим образом увеличена (относительно общей покрытой поверхности 10 относительно зон отражения отдельных регистраций). Этот эффект в основном подобен уже рассмотренной размытости из-за движения, при этом разница заключается в том, что вся зона отражения интегрирована в одно изображение. Это придает изображению размытый вид в той мере, в какой вообще необходимо распознать размытость из-за движения.
Поскольку геометрия регистрации не изменяется для плоской поверхности, сдвиг поверхности 10 не оказывает какого-либо влияния на участок 18 схемы; это остается неизменным на протяжении последовательности регистрации, причем, как было описано ранее, генерирование освещений схемы, разумеется, осуществляется с фазовым сдвигом. Однако это не показано на фиг. 4а в целях ясности.
На фиг. 4b показана та же ситуация, что и на фиг. 4а на виде сбоку. Нормали 16а к поверхности во время регистрации изображения а находились в то время в том же положении, что и нормали 16b к поверхности во время регистрации изображения b, которая показана здесь в качестве мгновенной регистрации расположения. Благодаря плоской поверхности 10 выравнивание нормалей 16а и 16b к поверхности одинаково, из-за чего участок 18 схемы также не изменяется.
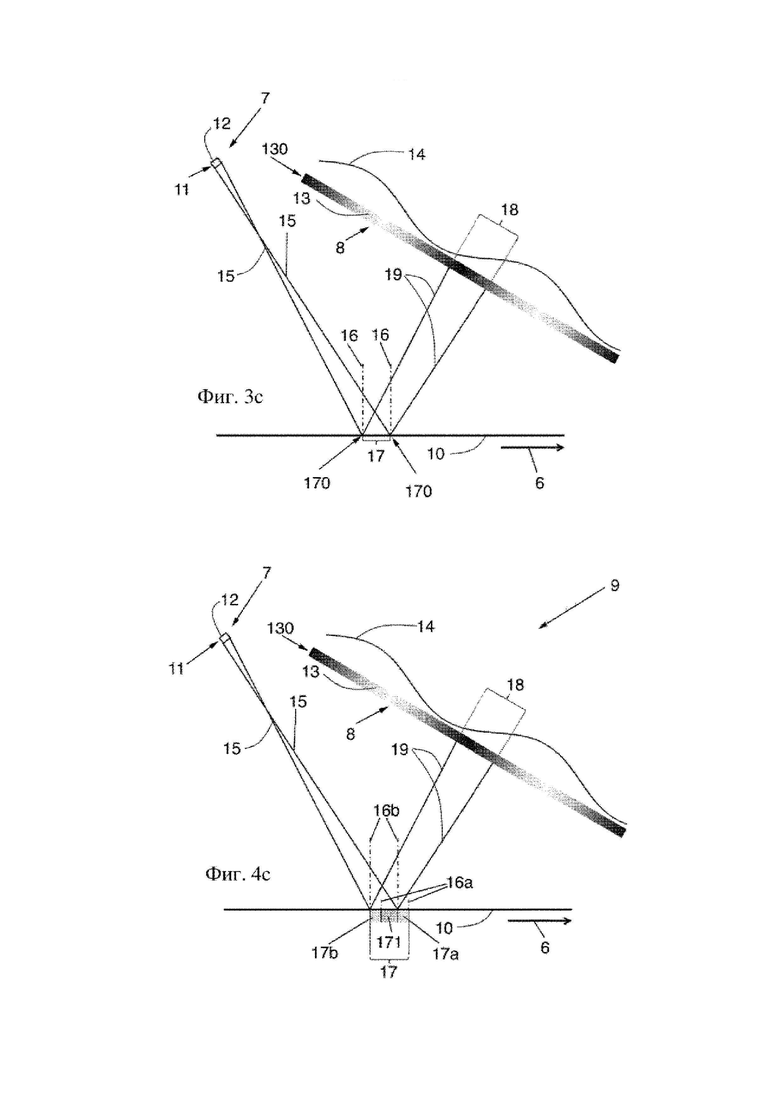
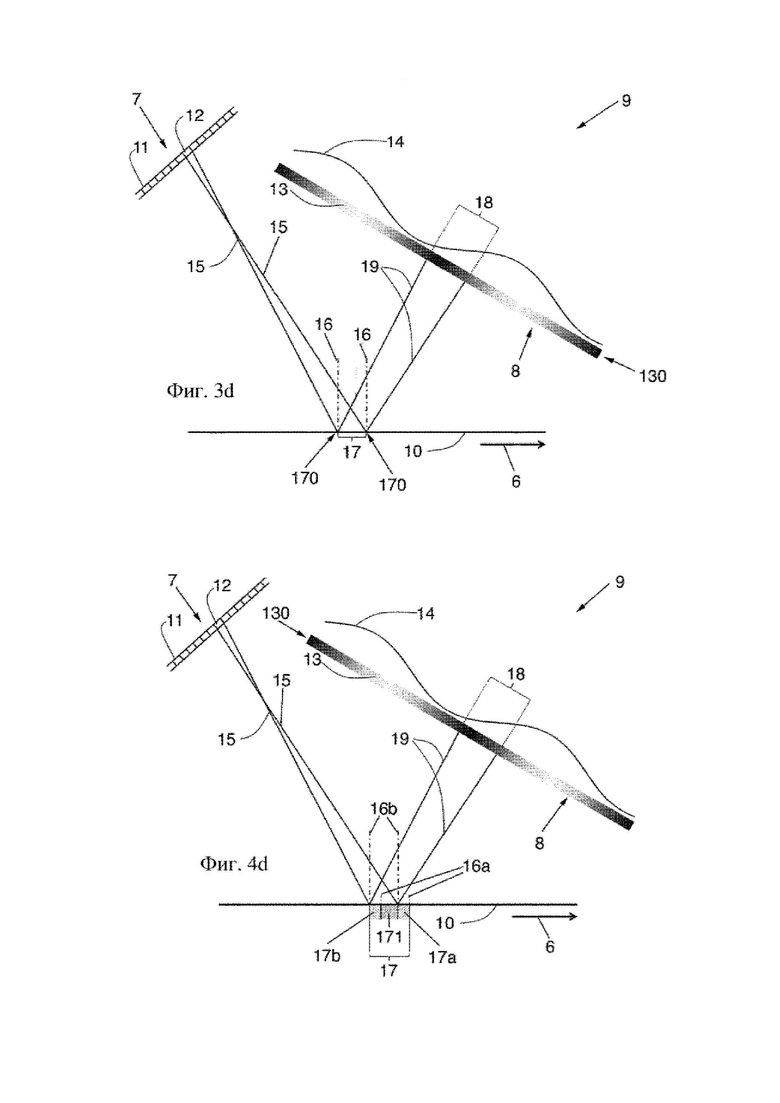
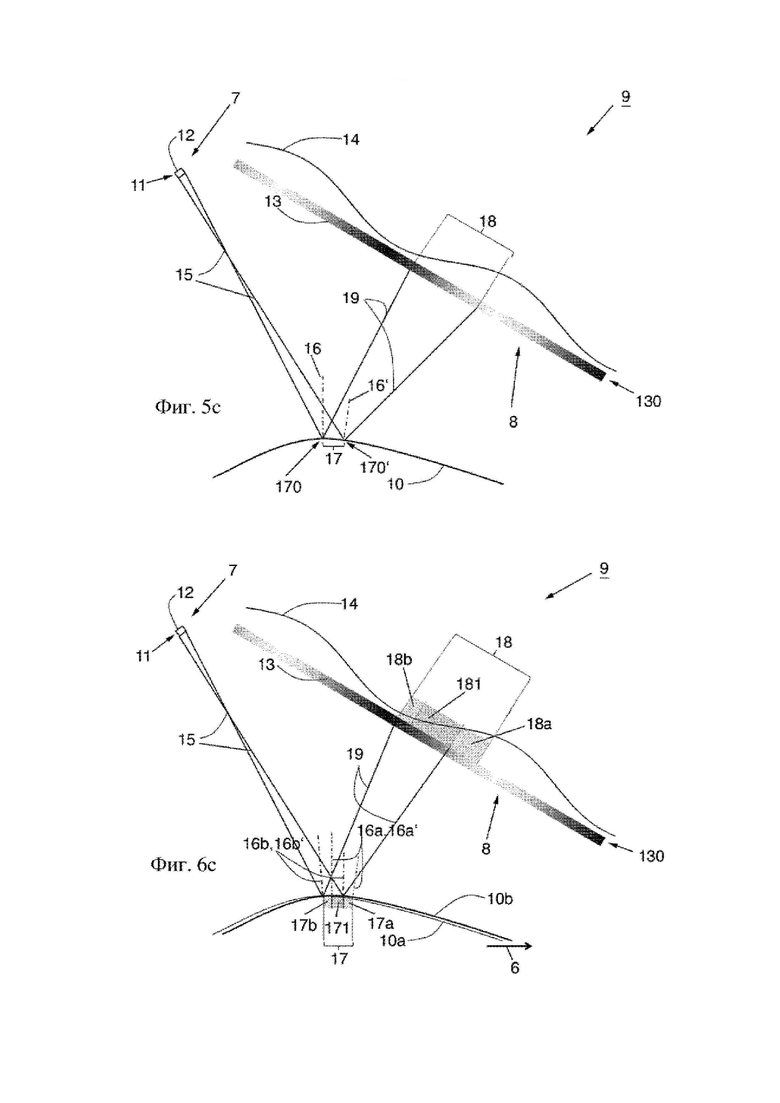
На фиг. 3с и 4с показано расположение контрольного устройства 9, где осветительное устройство 8 содержит осветительную линию, выровненную вдоль направления 6 движения поверхности 10. Этого можно достичь с помощью линейного осветительного устройства (с соответствующим образом выровненной линией) или с помощью матричного осветительного устройства, которым управляют соответствующим образом. Из-за плоской поверхности при таком расположении также возникает ситуация, сравнимая с той, что показана на фиг. 3а, 3b и 4а, 4b. Подробное описание следует смотреть в приведенном выше описании.
На фиг. 3d и 4d показано расположение контрольного устройства 9, подобное расположению, показанному на фиг. 3с и 4с, где не только осветительная линия осветительного устройства 8, но и сенсорная линия регистрирующего датчика 11 выровнены вдоль направления 6 движения поверхности 10. Устройство регистрации может быть соответственно выполнено в виде камеры с однострочной разверткой (только с одной сенсорной линией) или в виде матричной камеры (с несколькими сенсорными линиями, расположенными рядом друг с другом). Из-за плоской поверхности при таком расположении также возникает ситуация, сравнимая с расположением, показанным на фиг. 3а, 3b, 3 и 4а, 4b, 4с. Подробное описание следует смотреть в приведенном выше описании.
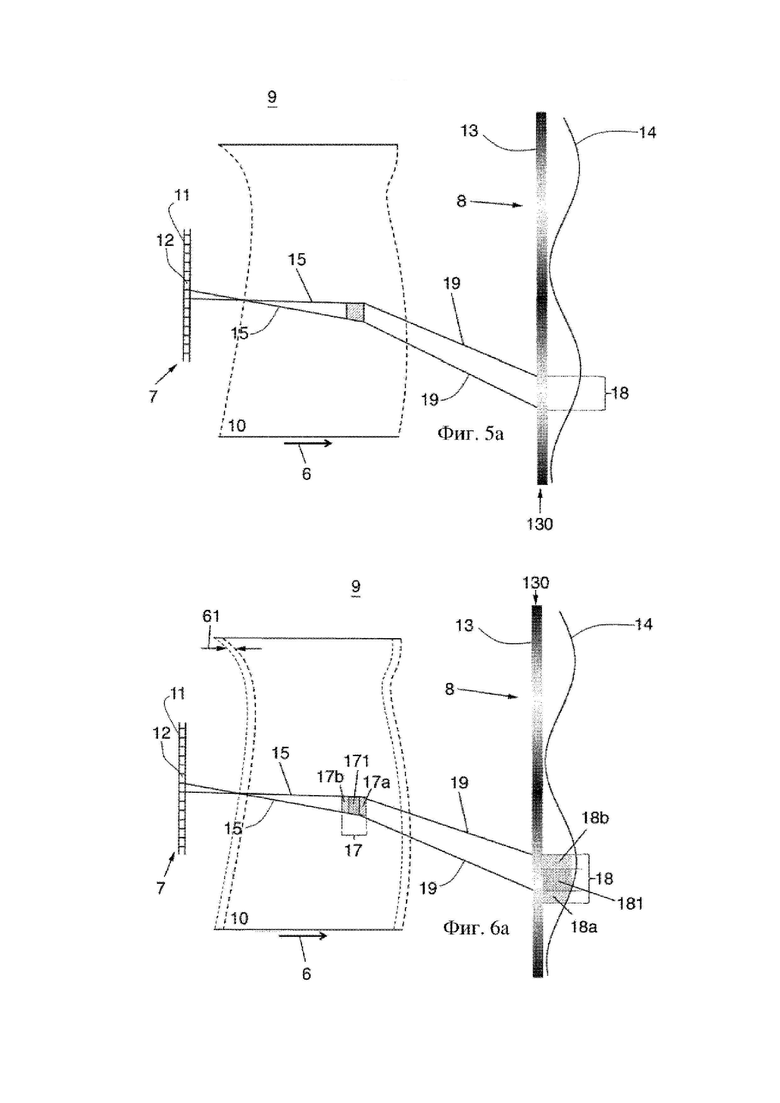
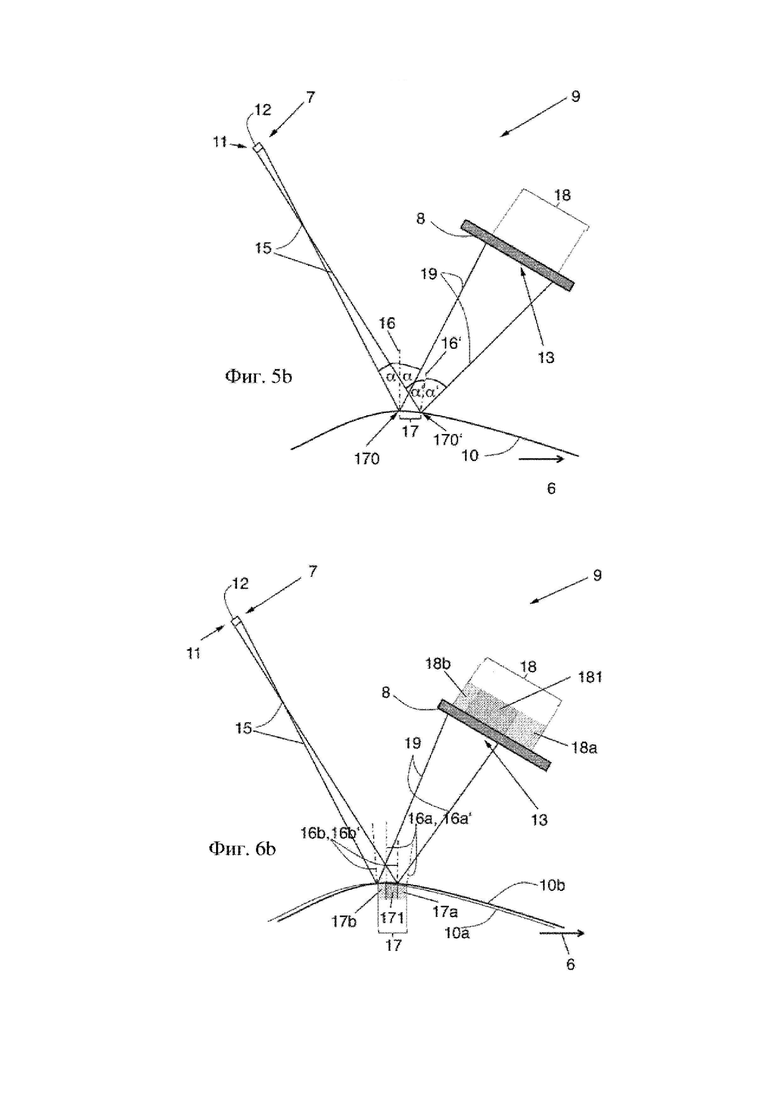
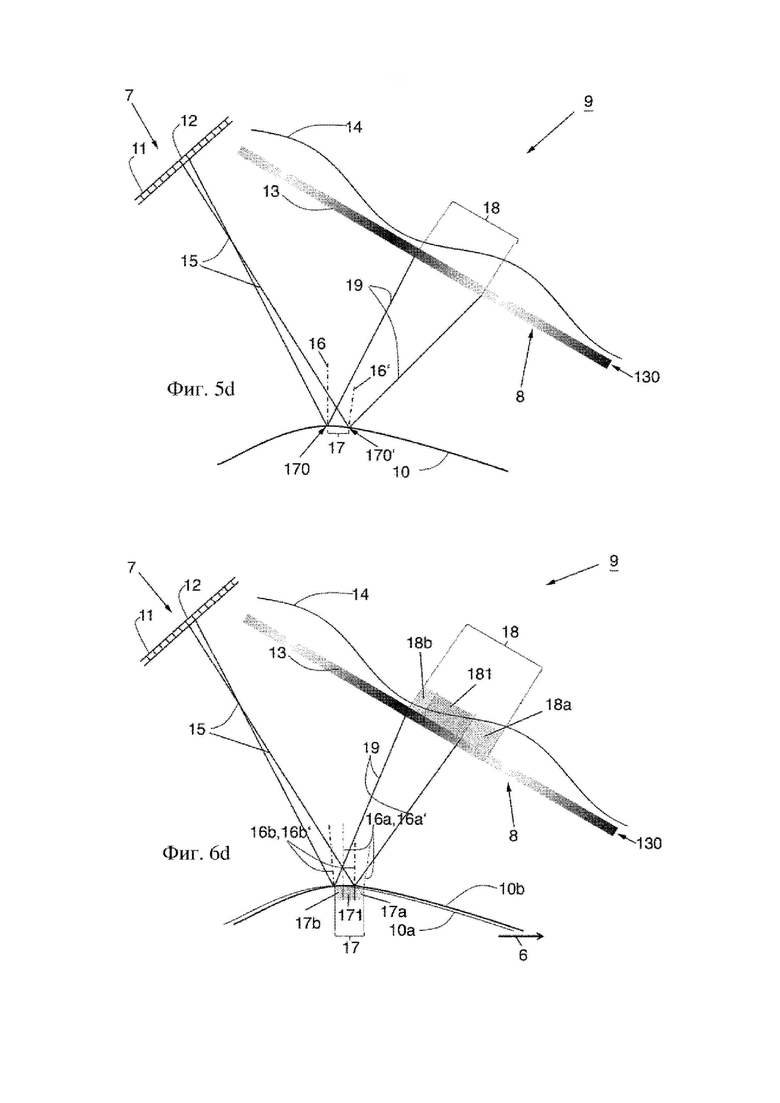
Ситуация является иной, когда поверхность действительно не является плоской. Это изображено на фиг. 5а, 5b, 5с и 5d/6a, 6b, 6с и 6d. Виды и расположения соответствуют видам и расположениям, рассмотренным со ссылкой на виды и расположения, относящиеся к фиг. 3а, 3b, 3c и 3d/4a, 4b, 4с и 4d. Поэтому принимая во внимание общее описание, следует сделать ссылку на вышеуказанное. Из-за кривизны поверхности 10, которая влияет на выравнивания нормалей 16, 16' к поверхности и влияет на отражения визуальных лучей 15, 19, получают разные участки 18а, 18b схемы как следствие разных изображений последовательности регистрации изображений.
На фиг. 5а, 5b, 5с и 5d показана ситуация для одного изображения соответственно, например первого изображения последовательностей изображений. Фиг. 5а по сути соответствует фиг. 3а, при этом стороны поверхности 10, изображенной изогнутым образом, обозначают кривизну поверхности 10 как проходящую поперек направления 6 движения. Из-за кривизны поверхности 10 визуальные лучи на виде сверху не отражаются в виде прямой линии, а отклоняются в точке 170, 170' отражения. Соответственно, отраженные визуальные лучи 19 падают на схему 13 на участке 18 схемы, который лежит в другом месте, чем участок 18 схемы согласно фиг. 3а. На фиг. 5b соответственно показано, что нормали 16 и 16' к поверхности по-разному выровнены в точках 170, 170' отражения (и, следовательно, отмечены разными условными обозначениями). Следовательно, углы отражения α, α' также отличаются.
На фиг. 6а и 6b показана зона 17а отражения (для визуальных лучей 15, 19, воспроизведенных на фиг. 5а, 5b во время регистрации) и зона 17b отражения (для визуальных лучей 15, 19, воспроизведенных на фиг. 6а, 6b), вместе с перекрывающимся участком 171. Участки 18а и 18b схемы и их перекрывающийся участок 181 показаны соответствующим образом.
Точка 12 изображения освещена в регистрирующем датчике 11 участком 18, 18а, 18b схемы, ограниченной краевыми визуальными лучами 15 (перед зеркальным отражением на поверхности 10)/19 (после зеркального отражения на поверхности 10), причем этот участок 18, 18а, 18b отображается на схему 13 в зонах 17, 17а, 17b отражения поверхности 10 в устройстве 7 регистрации. Однако каждый из визуальных лучей 15 отклоняется в соответствии с нормалями 16, 16', 16а, 16a'/16b, 16b' к поверхности, присутствующими в этом месте.
На фиг. 5а, 5b, 5с и 5d изображена ситуация в первом изображении последовательности. Кроме того, пиксель 12 камеры в датчике 11 изображений освещается участком 18 схемы, ограниченной краевыми лучами 15 (перед зеркальным отражением на поверхности)/19а (после зеркального отражения на поверхности), причем этот участок 18 отображается на схему 13 в зоне 17а поверхности 10 в камере. Однако в этом случае визуальный луч 15 отклоняется в соответствии с нормалями 16а/16b к поверхности, присутствующими в этом месте. Ситуация в соответственно последнем изображении каждой последовательности регистрации изображений показана на фиг. 6а, 6b, 6с и 6d. В этом случае участок 18b схемы 13 отображается на участке 17b на сдвинутой поверхности 10 в точке 12 изображения. В этом случае нормали 16b, 16b' к поверхности важны для зеркального отражения краевых лучей 15, исходящих из камеры. Поскольку они отличаются от присутствующих в первом изображении (фиг. 5а, 5b, 5с и 5d), участок схемы 130 освещения в осветительном устройстве 8, который виден/отображен в точке 12 изображения, также сдвигается. В общем, на протяжении последовательности изображений от первой до последней регистрации точка 12 изображения движется по участку 17 поверхности 10 на фиг. 6а, 6b, 6с и 6d и, таким образом, по всему участку 18 схемы 13. Точка 12 изображения видит участок, который находится как в зонах 17а и 17b отражения на поверхности 10, так и на участках 18а и 18b схемы на схеме 13. Она, т.е. точка 12 изображения, не видит участки, которые на протяжении всей последовательности изображений присутствуют только в 17а или 17b/18аили 18b.
Однако следует отметить, что пропорции на фиг. 3а, 3b, 3c, 3d, 4а, 4b, 4с, 4d, 5а, 5b, 5с, 5d, 6а, 6b, 6с, 6d не являются реалистичными. Также участки 171, 181 отсечки, обозначенные поперечной штриховкой соответственно не соответствуют реалистичным переменным, а служат только для иллюстративных целей и облегчения понимания. Фактически, по меньшей мере схема 13/схема освещения должна иметь намного большую длину волны по сравнению с изображенным размером точки 12 изображения, так что точка 12 изображения охватывает только небольшую долю длины волны. Если бы пропорции, связанные с размерами, были реалистичными, этот принцип невозможно было бы понять из графического материала.
Как уже было описано ранее, в последовательности регистрации изображений, которая зарегистрирована для процесса фазовых сдвигов нескольких изображений, одно и то же место поверхности 10, т.е. одна и та же зона 17 отражения, в действительности должно быть отображено на всех изображениях в каждой точке 12 изображения. При регистрации нескольких изображений один за другим они по отношению к движущейся поверхности 10 сдвигаются относительно друг друга. То, что имеет решающее значение для оценки того, может ли место, регистрируемое точкой 12 изображения во время последовательности изображений, по-прежнему считаться «приблизительно тем же местом» в контексте настоящего изобретения, в конечном итоге зависит от того, насколько отображение периодической схемы 13 на поверхности 10 в устройстве 7 регистрации изменяется во время последовательности изображений. В свою очередь, это зависит, с одной стороны, от собственно схемы 13 (схемы 130 освещения) и его расстояния от поверхности 10, с другой стороны, от зоны 17 отражения, которая отображается на точку 12 изображения на протяжении всей последовательности изображений, и от того, как изменяется этот участок (зона 17 отражения). Площадь зоны отражения зависит от оптического пиксельного разрешения (т.е. участка, который отображается в плоскости обзора на одном пикселе), времени воздействия, длительности последовательности воздействия и скорости движения (т.е. насколько далеко перемещается поверхность 10 на протяжении полной последовательности изображений). Изменения участка 18 схемы зависят от топографии поверхности (в частности, от изменения нормали к поверхности).
Если необходимо выполнить процесс фазовых сдвигов, схема 13 и точка 12 изображения (также в случае неподвижной поверхности 10) должны соответствовать друг другу таким образом, чтобы в части схемы 130 освещения, охватываемой точкой 12 изображения на схеме 130 освещения, яркость можно было считать почти постоянной/средняя яркость фактически представляла яркость, измеренную в точке 12 изображения. Также яркости позволяют изменяться до такой степени, чтобы яркость для требуемого минимального отклонения на поверхности (вызванного обнаруживаемым дефектом) изменялась в достаточной степени, чтобы контрольное устройство 9 было способным это воспринимать. Первое имеет место, если поверхность 10, охватываемая точкой 12 изображения в качестве зоны 19 отражения, может считаться почти плоской. Если это не так, топографическое измерение становится невозможным без дополнительной информации; все, что еще можно обнаружить, это наличие отклонения на поверхности. Кроме того, боковое разрешение (т.е. размер участка на поверхности) должно быть отрегулировано таким образом, чтобы наименьшие отклонения поверхности, которые будут выявлены во время контроля, все еще были разрешены.
Для подвижной поверхности 10 также необходимо учитывать, что во время последовательности регистрации изображений больший участок (вся зона 17 отражения) на поверхности 10 по фиг. 4а, 4b, 4с, 4d, например 6а, 6b, 6с, 6d, охвачен точкой изображения. Это влияет на боковое разрешение. Если поверхность дополнительно изогнута, одна точка изображения дополнительно охватывает больший участок 18 схемы на схеме 13. Это влияет на разрешение по глубине. Если поверхность 10 движется во время регистрации изображений в последовательности регистрации изображений, решающим фактором является то, как соответствующий визуальный луч 15, 19 точки 12 изображения проходит поверх схемы 130 освещения (мгновенная регистрация схемы 13).
В случае плоской поверхности 10 этот эффект вообще не происходит, как показано на фиг. 3 и 4. Таким образом, не происходят ошибки, вызванные отображением разных регистрируемых участков схемы в изображениях последовательности регистрации. Однако это применимо только при отсутствии ошибок измерения в ситуации без помех. Как только на поверхности появляется какой-либо дефект (или если она в любом случае изогнута), это больше не применимо. Следовательно, случай, показанный на фиг. 5 и 6, также происходит в случае ошибок измерения.
Благодаря способу согласно настоящему изобретению и соответствующему контрольному устройству система спроектирована таким образом, чтобы вышеупомянутые условия соблюдались также для времени воздействия/всего времени регистрации для полной последовательности регистрации изображений. В связи с этим, изображения последовательности регистрации изображений регистрируют в хронологическом порядке друг за другом так быстро, что сдвиг поверхности 10 во время регистрации настолько мал, что каждая точка 12 изображения охватывает участок (зону 17 отражения) на поверхности 10, которую все еще можно считать постоянной. Помимо этого, длина периода схемы 31 выбрана таким образом, что участок, по которой проходит визуальный луч 15, 19 устройства 7 регистрации, зеркально отображаемый или отражаемый на поверхности во время регистрации последовательности регистрации изображений, все еще можно считать постоянной/погрешность, возникающая из-за этого, меньше необходимого разрешения по глубине.
Чем больше искривлена поверхность 10, тем быстрее нужно регистрировать изображения и тем больше нужно увеличить длину волны схемы 13. Однако оба условия необходимо соблюдать только для тех участков на поверхности 10, которые фактически подлежат контролю. В большинстве случаев они представляют собой конструктивно не содержащие дефекты участки поверхности и участки, в которых существуют плоские топографические дефекты с большой длиной волны. Более того, большинство поверхностей имеют очень небольшие, в основном очень отвесные топографические дефекты. Применительно к этим дефектам в большинстве случаев условия больше не могут быть соблюдены, причем в основном это относится уже к статическому случаю. Все, что можно сделать в этом случае, это обнаружить эти дефекты (обнаружить дефект), но их измерение (измерение топографии) больше не возможно.
Очень высокие частоты регистрации изображений необходимы для этого способа, чтобы достичь необходимого бокового разрешения для всей последовательности регистрации изображений. В свою очередь, это требует очень короткого времени воздействия, что, в свою очередь, требует очень яркого освещения.
Для способа фазовых сдвигов, используемого очень преимущественным образом в этом контексте, наиболее преимущественно, чтобы схема 13 (т.е. каждый из схем 130 освещения) имел синусоидальную кривую яркости. Этого обычно достигают, например, используя экраны или схемы, проецируемые на поверхность. Благодаря этому кривая синуса может быть представлена очень хорошим или идеальным образом. К сожалению, яркость, достигаемая при экономически оправданных затратах с этим освещением, часто является недостаточной, и возможная частота изображений ограничена так, что их можно использовать только в медленных процессах.
При использовании светодиодной линии или светодиодной матрицы, где можно по отдельности управлять отдельными светодиодами или даже отдельными светодиодными модулями, которые состоят из нескольких одиночных светодиодов, можно реализовать как необходимую яркость, так и необходимую частоту переключения, синхронизированную с регистрацией изображений камерами. Или несколько линий могут быть объединены с образованием матрицы.
В простейшей форме отдельные светодиоды/светодиодные модули можно только включать или выключать. Это означает, что может быть реализована только прямоугольная кривая яркости, которая является лишь грубым приближением к фактически необходимой кривой яркости. Этого уже достаточно для выполнения способа фазовых сдвигов, но точность ограничена. Принимая различные меры, можно достичь лучшего приближения к необходимой кривой. Чем больше сходство с синусоидальной кривой, тем выше точность. Осветительная линия/осветительная матрица могут быть модифицированы таким образом, чтобы также можно было настраивать промежуточные значения яркости для отдельных светодиодов. В зависимости от размера светодиодов или светодиодных модулей таким образом можно достичь хорошего приближения к синусоидальной кривой. Это возможно, например, благодаря тому, что отдельные светодиоды/светодиодные модули соединяют только время от времени на протяжении фактического времени воздействия. Однако этот способ является дорогостоящим, поскольку в этом случае требуется чрезвычайно быстрая управляющая электроника. Решение, предпочтительное согласно настоящему изобретению, обеспечивает размытость на камере схемы, подлежащей отображению. Это уже было описано и не будет повторяться в данном документе.
Следует отметить, что в вышеприведенном описании термины «камера» и «устройство регистрации изображений» используются как синонимы. Все признаки и функции, раскрытые в отношении камеры, соответственно также применимы к устройству регистрации изображений и наоборот.
Перечень ссылочных обозначений:
1 объект
2 медная пленка
3 пластиковая пленка
4 первый дефект
5 второй дефект
6 направление движения
61 сдвиг
7 устройство регистрации
8 осветительное устройство
9 контрольное устройство
10 поверхность
11 регистрирующий датчик
12 точка изображения
13 схема
130 схема освещения
14 распределение яркости
15 визуальный луч
16 нормаль к поверхности
17 зона отражения
170 точка отражения
171 участок отсечки зон отражения отдельных изображений
18 участок схемы
181 участок отсечки участков схемы в отдельных изображениях
19 визуальные лучи
α угол отражения
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ПОВЕРХНОСТНЫХ ДЕФЕКТОВ ЦИЛИНДРИЧЕСКИХ ОБЪЕКТОВ | 2006 |
|
RU2323492C2 |
| ОСВЕТИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ЦИЛИНДРИЧЕСКИХ ОБЪЕКТОВ | 2007 |
|
RU2426981C2 |
| СИСТЕМА ОСВЕЩЕНИЯ ДЛЯ УСИЛЕНИЯ ВНЕШНЕГО ВИДА ОБЪЕКТА И СПОСОБ УСИЛЕНИЯ | 2010 |
|
RU2550737C2 |
| СИСТЕМА ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ ПРОТЯЖЕННОГО ПРУТКА (ВАРИАНТЫ) | 2006 |
|
RU2376586C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ШИН НА ПРОИЗВОДСТВЕННОЙ ЛИНИИ | 2015 |
|
RU2696343C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПИЛОМАТЕРИАЛОВ | 2007 |
|
RU2444002C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОВЕРХНОСТНЫХ ДЕФЕКТОВ ЦИЛИНДРИЧЕСКИХ ОБЪЕКТОВ | 2015 |
|
RU2604109C2 |
| СПОСОБ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ | 2010 |
|
RU2448323C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПЕРЕСЕЧЕНИЙ | 2009 |
|
RU2445571C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ШИН НА ПРОИЗВОДСТВЕННОЙ ЛИНИИ | 2015 |
|
RU2696346C2 |
Изобретение относится к способам оптического контроля поверхности объекта. Согласно способу периодическую по времени схему с разными схемами освещения генерируют на поверхности посредством осветительного устройства контрольного устройства во время последовательности регистрации изображений и в последовательности регистрации изображений регистрируют несколько изображений схемы на поверхности с помощью устройства регистрации изображений контрольного устройства. Генерирование одной из разных схем освещения синхронизируют соответственно с регистрацией одного из изображений схемы таким образом, что каждое изображение из последовательности регистрации изображений соответственно регистрируют с известной схемой освещения из разных схем освещения. Фазу схемы определяют из непрерывного ряда регистрируемых известных схем освещения в по меньшей мере одной точке изображения. Дефекты на поверхности обнаруживают по отклонениям схемы освещения, зарегистрированной в по меньшей мере одном изображении из сгенерированной схемы освещения. Осветительное устройство и устройство регистрации изображений располагают под углом отражения  , при этом во время контроля поверхности объект перемещают относительно контрольного устройства. Длительность последовательности регистрации изображений выбирают таким образом, что зона отражения последовательности, которая определяется как участок поверхности, охватываемый в совокупности зонами отражения в соответствующих изображениях из последовательности регистрации изображений, считается постоянной. Изобретение обеспечивает повышение надежности контроля движущихся поверхностей. 3 н. и 9 з.п. ф-лы, 18 ил.
, при этом во время контроля поверхности объект перемещают относительно контрольного устройства. Длительность последовательности регистрации изображений выбирают таким образом, что зона отражения последовательности, которая определяется как участок поверхности, охватываемый в совокупности зонами отражения в соответствующих изображениях из последовательности регистрации изображений, считается постоянной. Изобретение обеспечивает повышение надежности контроля движущихся поверхностей. 3 н. и 9 з.п. ф-лы, 18 ил.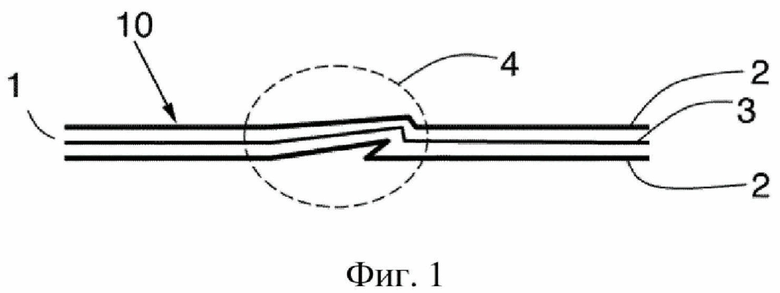
1. Способ оптического контроля поверхности (10) объекта (1) с помощью контрольного устройства (9), в котором периодическую по времени схему (13) с разными схемами (130) освещения генерируют на поверхности (10) посредством осветительного устройства (8) контрольного устройства (9) во время последовательности регистрации изображений и в последовательности регистрации изображений регистрируют несколько изображений схемы (13) на поверхности (10) с помощью устройства (7) регистрации изображений контрольного устройства (9), при этом
генерирование одной из разных схем (130) освещения синхронизируют соответственно с регистрацией одного из изображений схемы (13) таким образом, что каждое изображение из последовательности регистрации изображений соответственно регистрируют с известной схемой (130) освещения из разных схем (130) освещения;
фазу схемы (13) определяют из непрерывного ряда регистрируемых известных схем (130) освещения в по меньшей мере одной точке изображения;
дефекты (4, 5) на поверхности (10) обнаруживают по отклонениям схемы (130) освещения, зарегистрированной в по меньшей мере одном изображении из сгенерированной известной схемы (130) освещения;
осветительное устройство (8) и устройство (7) регистрации изображений располагают под углом отражения  ; и
; и
во время контроля поверхности (10) объект (1) перемещают относительно контрольного устройства (9);
отличающийся тем, что длительность последовательности регистрации изображений выбирают таким образом, что зону (17) отражения последовательности, которая определяется как участок поверхности, охватываемый в совокупности зонами (17a, 17b) отражения в соответствующих изображениях из последовательности регистрации изображений, можно считать постоянной, и для этого схему (130) освещения генерируют посредством осветительного устройства (7) так, что участок схемы (130) освещения, видимый в точках (12) изображений, регистрируемых во время каждой последовательности регистрации изображений, можно считать постоянным, путем выбора длины периода схемы (13) в схеме (130) освещения таким образом, чтобы в зависимости от топологии поверхности (10) в направлении хода схемы изменение интенсивности не превышало выбранный критерий.
2. Способ по п. 1, отличающийся тем, что размер точки (12) изображения устанавливают во время выполнения способа.
3. Способ по п. 2, отличающийся тем, что установку размера точки (12) изображения осуществляют путем объединения нескольких пикселей регистрирующего датчика (11) устройства (7) регистрации.
4. Способ по одному из предыдущих пунктов, отличающийся тем, что длительность последовательности регистрации изображений устанавливают во время выполнения способа.
5. Способ по п. 4, отличающийся тем, что при установке длительности последовательности регистрации изображений адаптируют по меньшей мере одну из переменных, перечисленных ниже:
- время воздействия изображения;
- яркость схемы (13), генерируемой на поверхности (10);
- частота сканирования регистрирующего датчика (11);
- количество изображений на последовательность регистрации изображений.
6. Способ по одному из предыдущих пунктов, отличающийся тем, что периодическую схему (13) генерируют вдоль направления движения объекта (10) поперек направления движения объекта (10) или поочередно вдоль и поперек направления движения объекта (10).
7. Способ по одному из предыдущих пунктов, отличающийся тем, что устройство (7) регистрации фокусируют таким образом, что схема (130) освещения, регистрируемая в изображении, является размытой.
8. Способ по одному из предыдущих пунктов, отличающийся тем, что во время контроля поверхности (10) трехмерную топографию поверхности (10) объекта (1) определяют посредством процессов дефлектометрии.
9. Применение способа по одному из предыдущих пп. 1-8 для контроля продукта в виде полотна или обработанных поверхностей (10).
10. Контрольное устройство для оптического контроля поверхности (10) объекта (1) с осветительным устройством (8) и устройством (7) регистрации, которые выровнены относительно друг друга таким образом, что визуальный луч (15), исходящий из устройства (7) регистрации в качестве визуального луча (19), отраженного на поверхности, падает на осветительное устройство (8) тогда, когда нормаль (16) к поверхности, расположенная вертикально на поверхности (10) в месте падения визуального луча (15, 19), делит пополам угол между выходящим визуальным лучом (15) и отраженным визуальным лучом (19), при этом осветительное устройство (8) выполнено с возможностью генерирования периодической по времени схемы (13) разными схемами (130) освещения во время последовательности регистрации изображений и устройство (7) регистрации выполнено с возможностью регистрации изображений схемы (13), отраженных на поверхности (10), во время последовательности регистрации изображений синхронно с генерированием схемы (130) освещения, при этом контрольное устройство (9) содержит вычислительный блок для управления контрольным устройством (9) и для оценки регистрируемых изображений, отличающееся тем, что процессор вычислительного блока выполнен с возможностью выполнения способа по одному из пп. 1-8.
11. Контрольное устройство по п. 10, отличающееся тем, что осветительное устройство (8) содержит индивидуально управляемые световые элементы, расположенные в ряд или в виде матрицы, и при этом устройство (7) регистрации содержит датчик (11) для регистрации изображений, отображаемых на датчике (11), с помощью регистрирующей оптики, при этом датчик (11) содержит отдельные пиксели датчика, расположенные в ряд или в виде матрицы.
12. Контрольное устройство по п. 10 или 11, отличающееся тем, что устройство (7) регистрации и осветительное устройство (8) расположены таким образом, что между соответствующим визуальным лучом (15, 19) и поверхностью (10) предусмотрен плоский угол обзора и освещения, меньший 30°, и/или между поверхностью (10) и осветительным устройством (8) предусмотрено большое расстояние освещения, находящееся в диапазоне от однократного до десятикратного расстояния между устройством (7) регистрации и поверхностью (10).
| US 2018347970 A1, 06.12.2018 | |||
| US 2006221198 A1, 05.10.2006 | |||
| US 2012293700 A1, 22.11.2012. |
