Область техники
Изобретение относится к космической навигации и может использоваться для оперативного точного определения направления на Солнце.
Уровень техники
Известна группа устройств и способов измерения угловых координат Солнца путем создания и измерения на матричном или линейном приемниках излучения изображения Солнца, либо изображения специальной щелевой маски [Федосеев В.И., Колосов М.П. Оптико-электронные приборы ориентации и навигации космических аппаратов. М.: Логос, 2007; Черемухин Г.С. Приборы ориентации на Солнце для космических аппаратов. М.: Воентехиздат, 2004]. При этом базовая приборная система координат реализована конструктивными элементами прибора, например, посадочной плоскостью, матричным или линейным приемником излучения, оптической системой и т.п.
Общими проблемами известных приборов для определения направления на Солнце, основанных на этих принципах, являются:
1) умеренная точность определения направления на Солнце – на уровне минут дуги;
2) недостаточно широкое поле зрения, не охватывающее доступную для наблюдений прибором, установленным на борту космического аппарата (КА), полусферу.
Для решения задач космической навигации востребованы датчики, определяющие направление на Солнце с точностью на уровне секунд дуги и с полями зрения, охватывающими или превышающими полусферу. Решение каждой из этих проблем по отдельности – возможно, однако их совместное решение представляет собой сложную техническую и изобретательскую задачу.
Устройство для определения направления на Солнце, реализующее один из группы указанных выше способов, представляет собой щелевой солнечный датчик, производившийся ИКИ РАН. В датчике отсутствует оптическая система, а изображение маски с несколькими щелями, освещенной Солнцем, проецируется на линейный приемник излучения. Точность определения направления на Солнце у такого датчика составляет 3 угловые минуты, а поле зрения – 60°×120° (что составляет около 1/4 полусферы) [Оптический солнечный датчик для космических аппаратов ОСД и ОСД-М // URL: http://ofo.ikiweb.ru/razrabotki/osd.html; Аванесов Г.А., Зиман Я.Л., Зарецкая Е.В., Куделин М.И., Никитин А.В., Форш А.А. Оптический солнечный датчик. Особенности конструкции и испытательного оборудования // Материалы первой Всероссийской научно-технической конференции «Современные проблемы определения ориентации и навигации космических аппаратов» / под ред. Г.А. Аванесова и др. ⎯ М.: ИКИ РАН, 2009. C. 78-89].
Таким образом, основным недостатком данного датчика является недостаточная (минутная) точность определения направления на Солнце. Кроме того, согласно [Федосеев В.И., Колосов М.П. Ф32 Оптико-электронные приборы ориентации и навигации. космических аппаратов: учеб. пособие. — М.: Логос, 2007] широкоугольными считаются солнечные датчики, размер поля зрения которых превышает 60°×60°. У солнечного датчика поле зрения вдвое больше, но, несмотря на это, вероятность попадания Солнца в поле зрения этого прибора, если оно не закрывается конструкциями КА, составляет только 25%.
Из уровня техники известны также иные устройства для определения направления на Солнце. Так, например, известные солнечные датчики 338КМ1 и 347К производства НПП «Геофизика-Космос» имеют сверхширокоугольные объективы типа «рыбий глаз» и ослабляющие фильтры, что позволяет строить изображение Солнца непосредственно на матричном приемнике излучения. Точность этих приборов составляет 1-2 минуты дуги по всему полю зрения, ширина которого равна 180° (т.е. оно охватывает полусферу) [Солнечный датчик 347К // URL: http://www.geofizika-cosmos.ru/assets/files/pribory/347k-rus.jpg (дата доступа 10.02.2023); Пирогов М. Новое поколение приборов ОАО «НПП «ГЕОФИЗИКА-КОСМОС» // Информационные спутниковые системы, 2008. № 5. С. 18-19.; Пирогов М.Г., Варламов В.И., Цымбал Г.Л. и др. Результаты лабораторно-отработочных испытаний статического прибора ориентации по Солнцу 347К // Сибирский аэрокосмический журнал, 2013. № 6(52). С. 117-121].
Таким образом, в устройствах 338КМ1 и 347К решена проблема ширины поля зрения – если Солнце находится с той же стороны борта КА, что и прибор, то оно попадет в поле зрения прибора. Однако известные приборы характеризуются невысокой (минутной) точностью определения направления на Солнце.
Для повышения точности определения направления на Солнце используют оптический прибор с узким полем зрения шириной в несколько градусов. Для КА, обращающихся вокруг Земли, видимый угловой размер Солнца составляет примерно 0,5°. Подобный прибор будет строить изображение диска Солнца на матричном приемнике излучения. Размеры этого изображения будут составлять сотни пикселей, что легко позволяет определить положение его центра с точностью порядка секунды дуги или лучше.
Однако вероятность случайного попадания Солнца в узкое поле зрения такого устройства низка. Оптическую систему необходимо наводить на текущее положение Солнца, в приборе присутствуют подвижные части, что усложняет, утяжеляет и приводит к удорожанию конструкции прибора и одновременно делает ее менее надежной. Помимо этого, для эффективной работы положение оптической системы необходимо знать с точностью не меньшей, чем точность определения центра изображения диска Солнца.
Наиболее близким к заявляемому объекту по технической сущности (прототипом) является устройство измерения угловых координат Солнца по патенту RU №2555216, содержащее широкоугольный объектив и матричное фотоприемное устройство с блоком управления, обработки и расчета. Для проведения измерений перед объективом устанавливают сферический интерференционный элемент, представляющий собой сферический прозрачный мениск, на внешнюю выпуклую поверхность которого равномерно нанесен узкополосный интерференционный светофильтр, при этом внутренняя вогнутая поверхность мениска матирована, а после широкоугольного объектива расположен отрезающий узкополосный светофильтр. Широкоугольный объектив расположен в центре кривизны сферического интерференционного элемента, сфокусирован на его внутренней поверхности и строит ее резкое изображение на матричном приемнике излучения.
В результате прохождения излучения Солнца через сферический интерференционный элемент и его последующей спектральной фильтрации с помощью отсекающего светофильтра на матричном приемнике излучения образуется изображение кольцеобразной фигуры или ее части (если фигура выходит за пределы поля зрения объектива). На внутренней поверхности сферического интерференционного элемента эта фигура представляет собой узкое круговое кольцо, центр которого совпадает с направлением на Солнце. Обработка изображения кольцеобразной фигуры, получаемого на матричном приемнике излучения, с учетом ее конечной ширины и искажений, вносимых объективом, в блоке управления, обработки и расчета позволяет определить направление на центр Солнца (диска Солнца).
Известное решение характеризует устройство измерения угловых координат Солнца с точностью порядка секунды дуги и полем зрения, превышающим полусферу, однако характеризуется сложностью изготовления сферического интерференционного элемента, поскольку довольно сложно обеспечить равномерное многослойное прецизионное интерференционное покрытие сферической поверхности.
Таким образом, техническая проблема, решаемая заявляемым изобретением, заключается в необходимости преодоления недостатков, присущих упомянутым выше аналогам и прототипу, за счет создания более простого и точного способа определения вектора направления на Солнце, основанного на использовании солнечного датчика, содержащего интерференционные элементы.
Краткое раскрытие сущности изобретения
Технический результат, достигаемый при использовании заявляемого изобретения, заключается в повышении точности определения направления на Солнце до единиц угловых секунд или десятых долей угловой секунды в результате уменьшения погрешности определения направления на Солнце.
Заявленный технический результат достигается тем, что интерференционный элемент включает цилиндрическую основу, внешняя боковая поверхность которой снабжена многослойным интерференционным покрытием, представляющим собой светофильтр, пропускающий излучение в полосе с центральной длиной волны λ0 при его падении по нормали к цилиндру и в полосе с центральной длиной волны  при произвольных углах падения
при произвольных углах падения  , а внутренняя боковая поверхность матирована или снабжена покрытием, рассеивающим свет; систему регистрации изображения, формируемого на внутренней поверхности основы, содержащую, по меньшей мере, одну камеру, включающую объектив и матричный приемник излучения, при этом камера соединена с основой интерференционного элемента посредством непрозрачного переходника и установлена с возможностью формирования на матричном приемнике излучения изображения внутренней поверхности основы, и отсекающий светофильтр, выполненный с возможностью пропуска излучения в полосе с центральной длиной волны λ1<λ0, установленный между объективом камеры и основой или внутри камеры между объективом и матричным приемником излучения. Основа интерференционного элемента может быть выполнена в виде полой прозрачной цилиндрической трубки, при этом камера системы регистрации изображения установлена с одного торца трубки вдоль ее продольной оси, а другой торец трубки закрыт непрозрачной пробкой или крышкой, при этом оптическая ось объектива совпадает с продольной осью цилиндрической трубки. Основа интерференционного элемента также может быть выполнена в виде двух прозрачных противоположно ориентированных полуцилиндров, при этом камера системы регистрации изображения установлена в каждом полуцилиндре и ориентирована в поперечном направлении по отношению к оптической оси основы интерференционного элемента. Интерференционный элемент может быть снабжен ослабляющим светофильтром, выполненным с возможностью поглощения части излучения Солнца, установленным между объективом камеры и основой или внутри камеры между объективом и матричным приемником излучения.
, а внутренняя боковая поверхность матирована или снабжена покрытием, рассеивающим свет; систему регистрации изображения, формируемого на внутренней поверхности основы, содержащую, по меньшей мере, одну камеру, включающую объектив и матричный приемник излучения, при этом камера соединена с основой интерференционного элемента посредством непрозрачного переходника и установлена с возможностью формирования на матричном приемнике излучения изображения внутренней поверхности основы, и отсекающий светофильтр, выполненный с возможностью пропуска излучения в полосе с центральной длиной волны λ1<λ0, установленный между объективом камеры и основой или внутри камеры между объективом и матричным приемником излучения. Основа интерференционного элемента может быть выполнена в виде полой прозрачной цилиндрической трубки, при этом камера системы регистрации изображения установлена с одного торца трубки вдоль ее продольной оси, а другой торец трубки закрыт непрозрачной пробкой или крышкой, при этом оптическая ось объектива совпадает с продольной осью цилиндрической трубки. Основа интерференционного элемента также может быть выполнена в виде двух прозрачных противоположно ориентированных полуцилиндров, при этом камера системы регистрации изображения установлена в каждом полуцилиндре и ориентирована в поперечном направлении по отношению к оптической оси основы интерференционного элемента. Интерференционный элемент может быть снабжен ослабляющим светофильтром, выполненным с возможностью поглощения части излучения Солнца, установленным между объективом камеры и основой или внутри камеры между объективом и матричным приемником излучения.
Технический результат достигается также при использовании солнечного датчика, включающего корпус, внутри которого закреплены по меньшей мере два интерференционных элемента с продольным или поперечным расположением системы регистрации изображения, выполненные по п.1 формулы изобретения, и блок управления, соединенный со всеми интерференционными элементами и выполненный с возможностью обработки данных, получаемых от интерференционных элементов. При использовании двух интерференционных элементов угол  между их осями удовлетворяет следующему соотношению
между их осями удовлетворяет следующему соотношению  , где
, где  , а угол
, а угол  соответствует углу падения излучения, при котором интерференционное покрытие интерференционного элемента пропускает излучение с длиной волны, равной центральной длине волны пропускания отсекающего светофильтра
соответствует углу падения излучения, при котором интерференционное покрытие интерференционного элемента пропускает излучение с длиной волны, равной центральной длине волны пропускания отсекающего светофильтра  . При использовании трех интерференционных элементов углы между их осями удовлетворяют следующим соотношениям
. При использовании трех интерференционных элементов углы между их осями удовлетворяют следующим соотношениям  где
где  – угол между осями первого и второго интерференционных элементов,
– угол между осями первого и второго интерференционных элементов,  – угол между осями первого и третьего интерференционных элементов,
– угол между осями первого и третьего интерференционных элементов,  – угол между осями второго и третьего интерференционных элементов, , а угол соответствует углу падения, при котором интерференционное покрытие интерференционного элемента пропускает излучение с длиной волны равной центральной длине волны пропускания отсекающего светофильтра .
– угол между осями второго и третьего интерференционных элементов, , а угол соответствует углу падения, при котором интерференционное покрытие интерференционного элемента пропускает излучение с длиной волны равной центральной длине волны пропускания отсекающего светофильтра .
Заявленный технический результат достигается также в результате реализации способа определения вектора направления на Солнца, включающего
- размещение солнечного датчика, выполненного по п.8 формулы изобретения, включающего, по меньшей мере, два интерференционных элемента, выполненных по п.1 формулы изобретения, на борту космического аппарата с обеспечением освещения Солнцем внешних поверхностей интерференционных элементов,
- фиксацию объективами камер изображений внутренней поверхности основы интерференционного элемента с формированием этих изображений на соответствующих матричных приемниках излучения каждого интерференционного элемента,
- направление оцифрованных изображений с выходов матричных приемников излучения на блок управления солнечного датчика,
- определение наличия на изображениях одной или двух полос,
- обработку изображений, содержащих одну или две полосы, с получением единичных векторов нормалей к полуплоскостям, в которых расположен центр Солнца, для каждого интерференционного элемента в системе координат солнечного датчика, по которым определяют единичный вектор направления на Солнце.
При наличии полос только на двух обрабатываемых изображениях, единичный вектор направления на Солнце
 ,
,
представляет собой линию пересечения двух полуплоскостей, при этом  - единичные векторы нормали к полуплоскостям, проходящим через ось цилиндрической трубки и через центр Солнца для двух интерференционных элементов, соответственно. При наличии полос на трех обрабатываемых изображениях, единичный вектор направления на Солнце
- единичные векторы нормали к полуплоскостям, проходящим через ось цилиндрической трубки и через центр Солнца для двух интерференционных элементов, соответственно. При наличии полос на трех обрабатываемых изображениях, единичный вектор направления на Солнце
 , где
, где  представляют собой вектора пересечения полуплоскостей, при этом
представляют собой вектора пересечения полуплоскостей, при этом  единичные векторы нормали к полуплоскостям, проходящим через ось цилиндрической трубки и через центр Солнца для трех интерференционных элементов, соответственно.
единичные векторы нормали к полуплоскостям, проходящим через ось цилиндрической трубки и через центр Солнца для трех интерференционных элементов, соответственно.
Установлено, что при использовании для оценки направления на Солнце солнечного датчика с известным объективом «рыбий глаз» с шириной поля зрения 180° (полусфера) без интерференционных элементов, точность измерения значительно ниже. Размер матрицы, на которой строится изображение полусферы, составляет 1000×1000 пикселей. В этом случае изображение Солнца, угловой размер которого составляет 0,5°, на матрице будет занимать 3×3 = 9 пикселей, при точности таких солнечных датчиков, равной одной угловой минуте.
В случае использования интерференционных элементов заявляемой конструкции яркая линия, формируемая на матричном приемнике, занимает половину кадра в длину (около 500 пикселей). Ее ширина определяется выбором характеристик интерференционного покрытия и отсекающего фильтра, она не может быть меньше размера изображения Солнца, построенного объективом «рыбий глаз», т. е. 3 пикселей. За счет использования цилиндрического интерференционного элемента даже при очень узкой яркой линии – шириной 10 пикселей - площадь 2 ярких линий будет составлять 10 000 пикселей. То есть, изображение линий будет содержать примерно в 1000 раз большее количество фотоэлектронов, чем изображение Солнца размером 3×3 пикселя. Соответственно, погрешность определения направления на Солнце будет в  раз меньше, т. е. 2 угловые секунды. Умеренное увеличение ширины полос и использование матрицы с бóльшим числом пикселей приводит к уменьшению погрешности.
раз меньше, т. е. 2 угловые секунды. Умеренное увеличение ширины полос и использование матрицы с бóльшим числом пикселей приводит к уменьшению погрешности.
Краткое описание чертежей
Заявляемое решение поясняется следующими изображениями, где
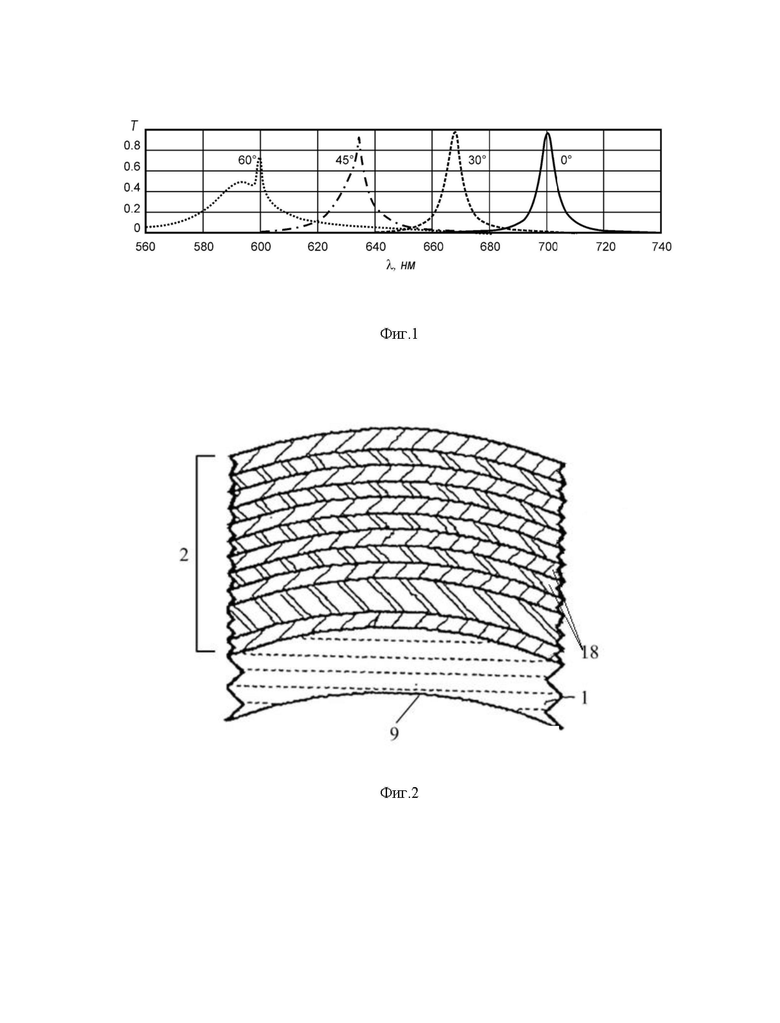
на фиг. 1 представлена зависимость полосы пропускания плоского интерференционного фильтра от угла падения излучения. В качестве примера показан 18-слойный интерференционный фильтр с колоколообразным профилем пропускания.
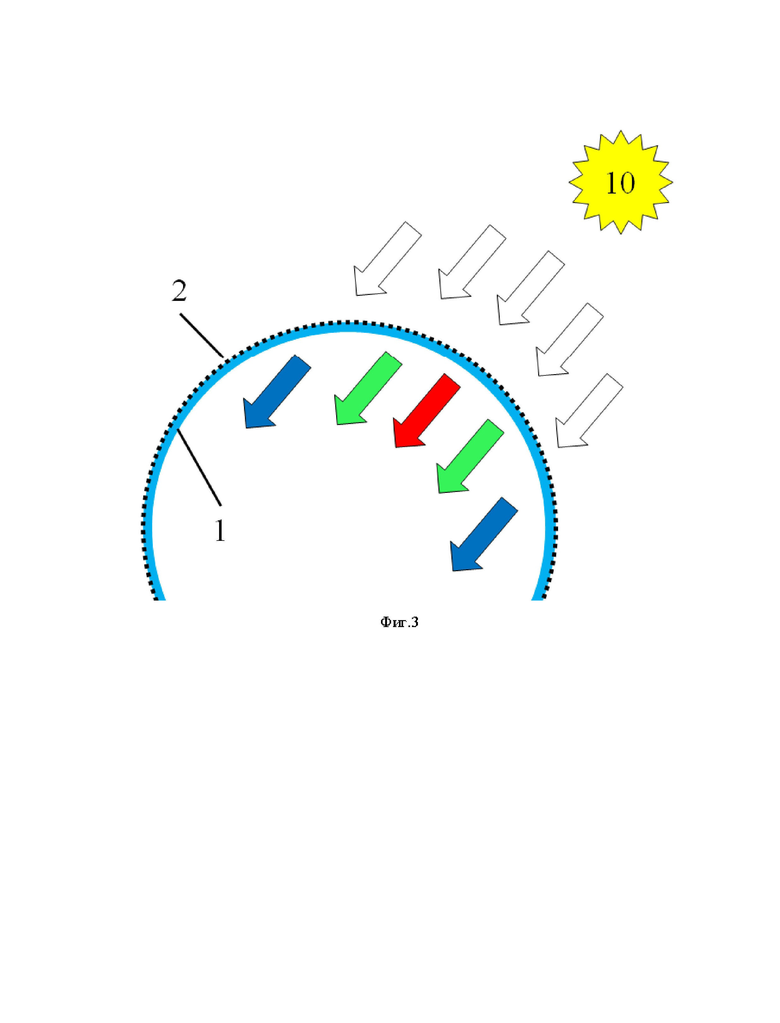
На фиг. 2 схематично представлена часть поперечного сечения цилиндрического интерференционного элемента. Коэффициенты преломления соседних интерференционных слоев отличаются не менее, чем на 0,4-0,5. Толщины интерференционных слоев близки к 1/4 характерной длины волны света, пропускаемой светофильтром. Точные значения толщин интерференционных слоев и их количество определяются в результате расчета в зависимости от требований к профилю пропускания светофильтра. Границы между интерференционными слоями представляют собой соосные цилиндры, оси которых совпадают с осью цилиндрической основы (т.е. каждый интерференционный слой имеет постоянную толщину. Для наглядности на фигуре толщины интерференционных слоев существенно увеличены, суммарная толщина всех слоев интерференционного покрытия значительно меньше толщины стенки основы интерференционного элемента.
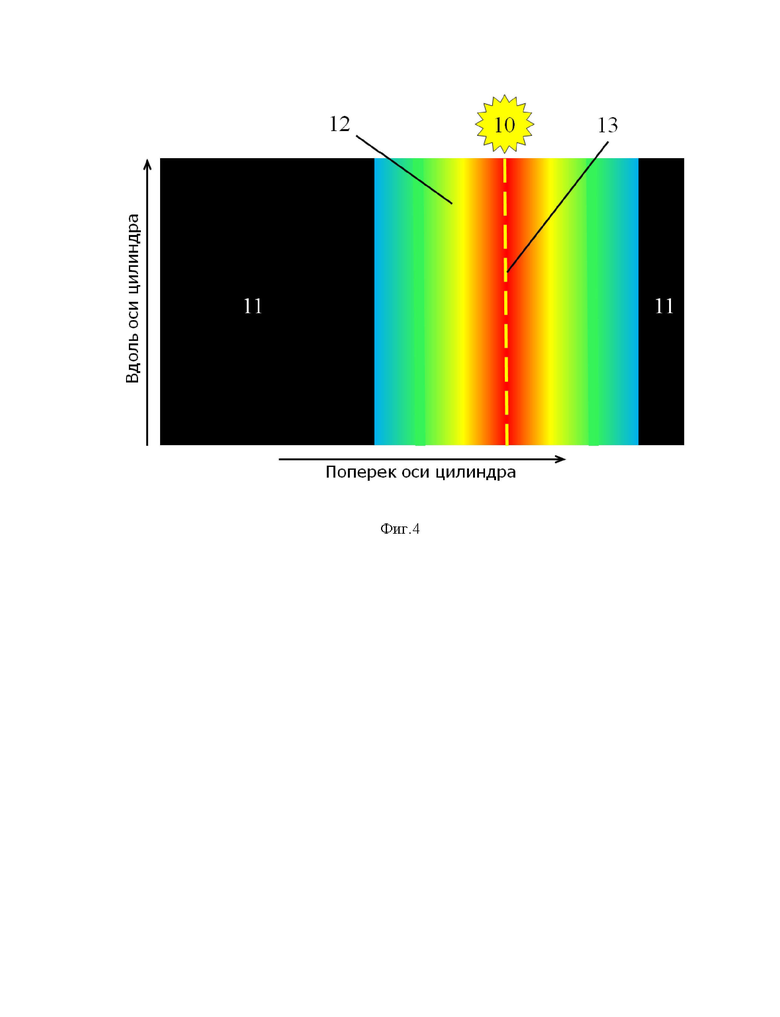
На фиг.3 схематично представлен принцип действия цилиндрического интерференционного элемента. Показано поперечное сечение тонкостенной цилиндрической прозрачной трубки 1, на внешнюю поверхность которой равномерно нанесен интерференционный светофильтр 2. Солнце 10 (в правом верхнем углу фигуры) освещает цилиндр параллельным пучком лучей «белого» (широкополосного) света. Интерференционное покрытие (интерференционный фильтр) пропускает внутрь цилиндра свет только определенной длины волны, зависящей от угла падения конкретного луча: максимальная длина волны  пропускается на линии, проходящей через ось цилиндра и Солнце, все более короткие длины волн – по мере приближения к краям цилиндра.
пропускается на линии, проходящей через ось цилиндра и Солнце, все более короткие длины волн – по мере приближения к краям цилиндра.
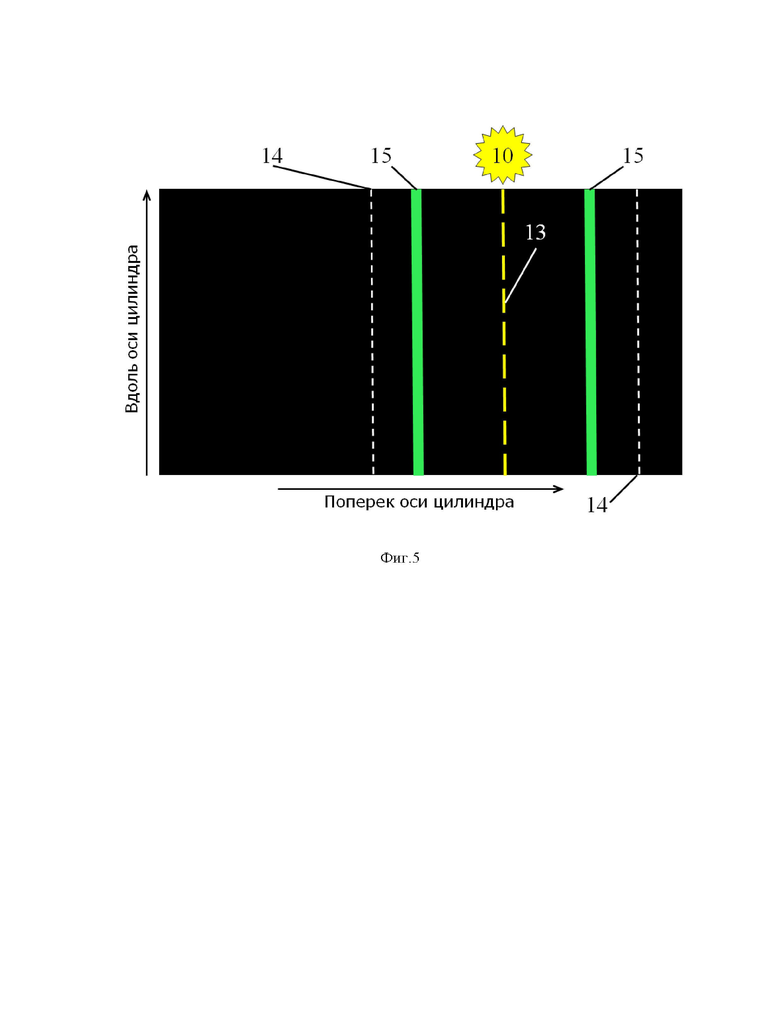
На фиг. 4 представлена развертка вида внутренней стороны цилиндрического интерференционного элемента, освещенного Солнцем 10 снаружи. Половина поверхности элемента не освещена – находится в тени 11. На фигуре эта часть показана черным цветом. Вторая половина внутренней поверхности яркая 12. Длина волны пропускаемого элементом излучения максимальна в центре освещенной полосы  (показано пунктиром 13) и симметрично от центра полосы к краям уменьшается. Центральная линия 13 соответствует полуплоскости, проходящей через ось цилиндрического элемента и Солнце. Длина волны пропускаемого излучения постоянная вдоль линий, параллельных оси цилиндрического элемента.
(показано пунктиром 13) и симметрично от центра полосы к краям уменьшается. Центральная линия 13 соответствует полуплоскости, проходящей через ось цилиндрического элемента и Солнце. Длина волны пропускаемого излучения постоянная вдоль линий, параллельных оси цилиндрического элемента.
На фиг. 5 представлена развертка вида внутренней стороны цилиндрического интерференционного элемента, освещенного Солнцем 10 для случая  (когда максимальная длина волны, пропускаемая покрытием интерференционного элемента, превышает длину волны, пропускаемую отсекающим светофильтром). λ1 – длина волны, которую пропускает отсекающий светофильтр. После спектральной фильтрации видны две яркие полосы 15. Пунктирными линиями показаны центр 13 и границы 14 освещенной Солнцем части цилиндра.
(когда максимальная длина волны, пропускаемая покрытием интерференционного элемента, превышает длину волны, пропускаемую отсекающим светофильтром). λ1 – длина волны, которую пропускает отсекающий светофильтр. После спектральной фильтрации видны две яркие полосы 15. Пунктирными линиями показаны центр 13 и границы 14 освещенной Солнцем части цилиндра.
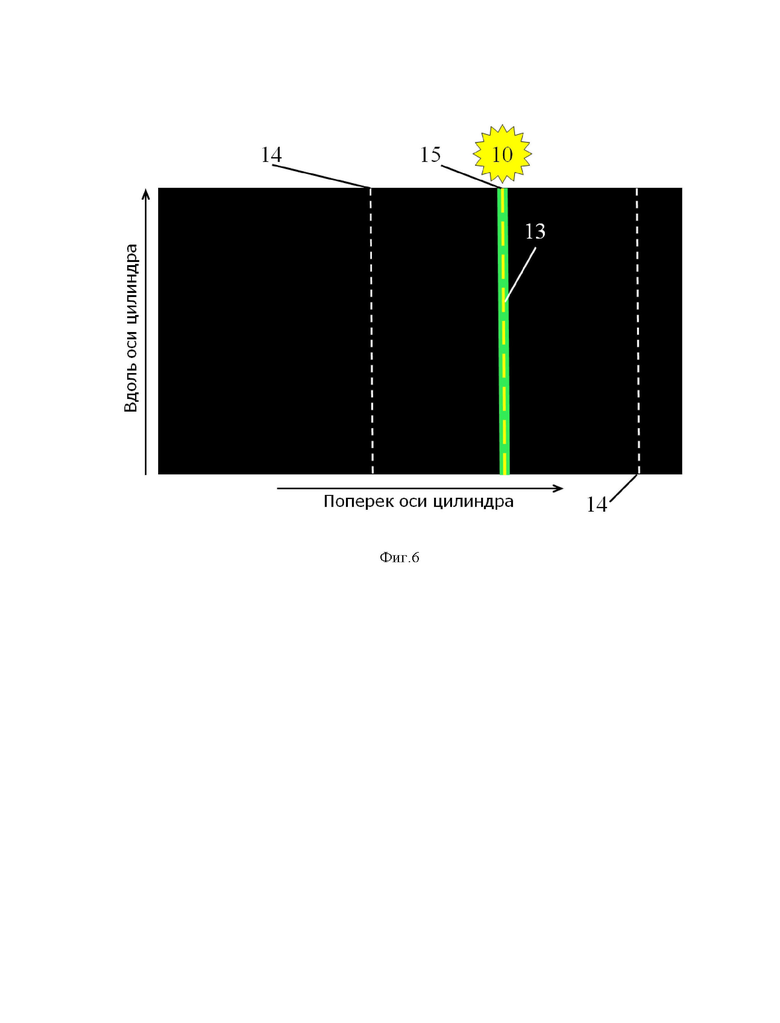
На фиг. 6 представлена развертка вида внутренней стороны цилиндрического интерференционного элемента, освещенного Солнцем 10 для случая  (когда максимальная длина волны, пропускаемая покрытием интерференционного элемента, равна длине волны, пропускаемой отсекающим светофильтром). После спектральной фильтрации видна одна яркая полоса 15, расположенная в центре освещенной Солнцем части цилиндра.
(когда максимальная длина волны, пропускаемая покрытием интерференционного элемента, равна длине волны, пропускаемой отсекающим светофильтром). После спектральной фильтрации видна одна яркая полоса 15, расположенная в центре освещенной Солнцем части цилиндра.
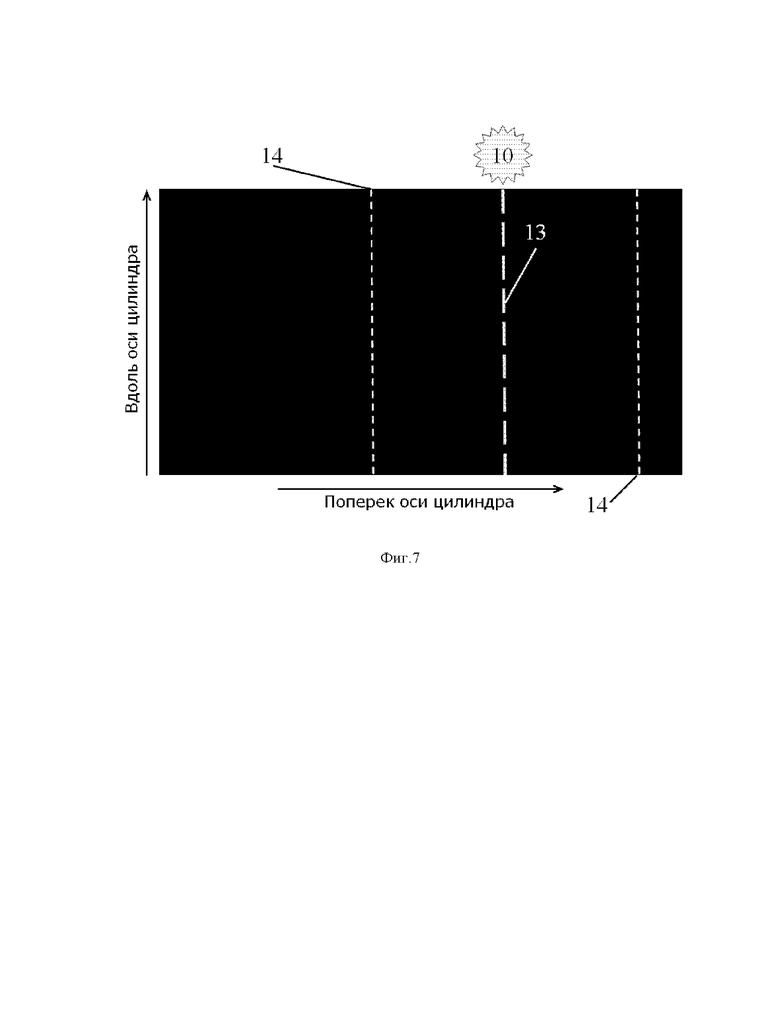
На фиг. 7 представлена развертка вида внутренней стороны цилиндрического интерференционного элемента, освещенного Солнцем 10 для случая  (когда максимальная длина волны, пропускаемая покрытием интерференционного элемента, меньше длины волны, пропускаемой отсекающим светофильтром). В этом случае после спектральной фильтрации ярких полос нет.
(когда максимальная длина волны, пропускаемая покрытием интерференционного элемента, меньше длины волны, пропускаемой отсекающим светофильтром). В этом случае после спектральной фильтрации ярких полос нет.
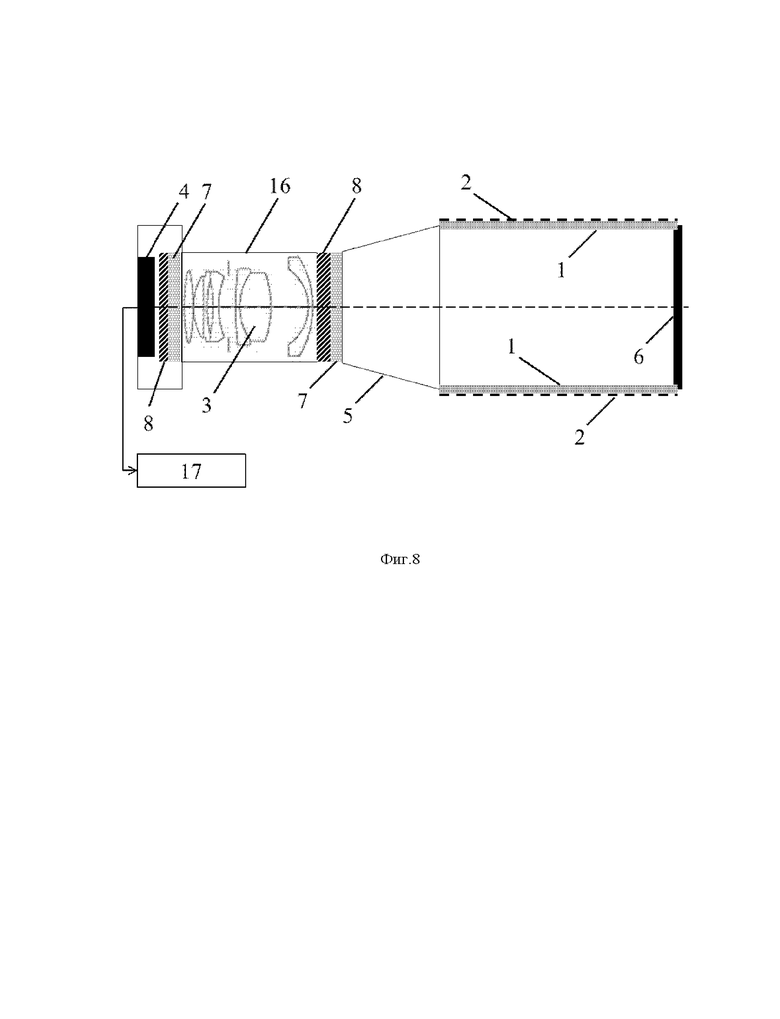
На фиг. 8 схематично представлен разрез цилиндрического интерференционного элемента с продольным расположением системы регистрации вдоль оптической оси объектива, совпадающей с продольной осью цилиндрического интерференционного элемента. Поле зрения, показанного на фигуре 8 интерференционного элемента, охватывает почти всю сферу.
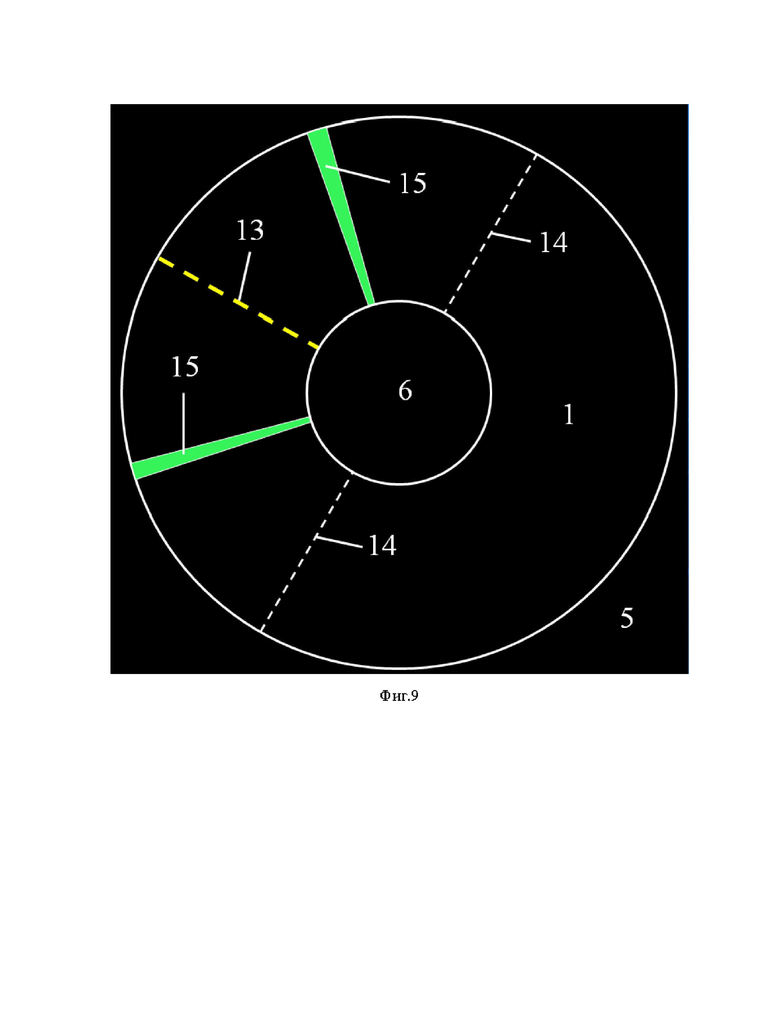
На фиг. 9 представлено изображение, формирующееся на матричном приемнике излучения цилиндрического интерференционного элемента при продольном расположении системы регистрации.
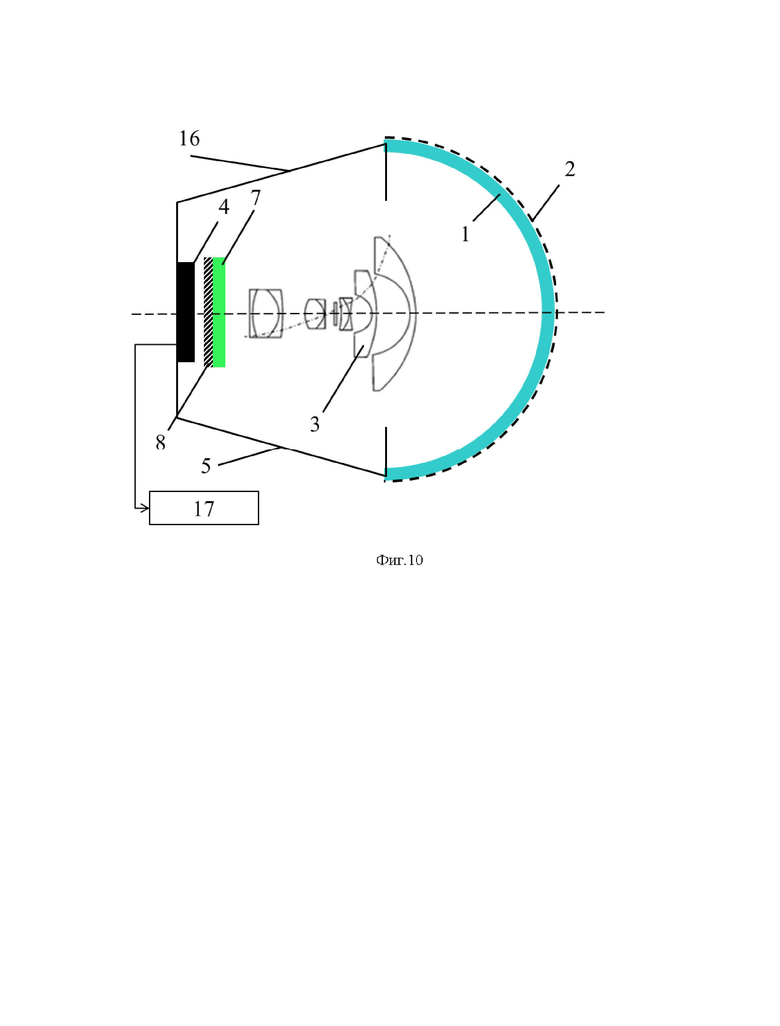
На фиг. 10 схематично представлен разрез цилиндрического интерференционного элемента с поперечным расположением системы регистрации вдоль оптической оси объектива и перпендикулярно продольной оси интерференционного элемента.
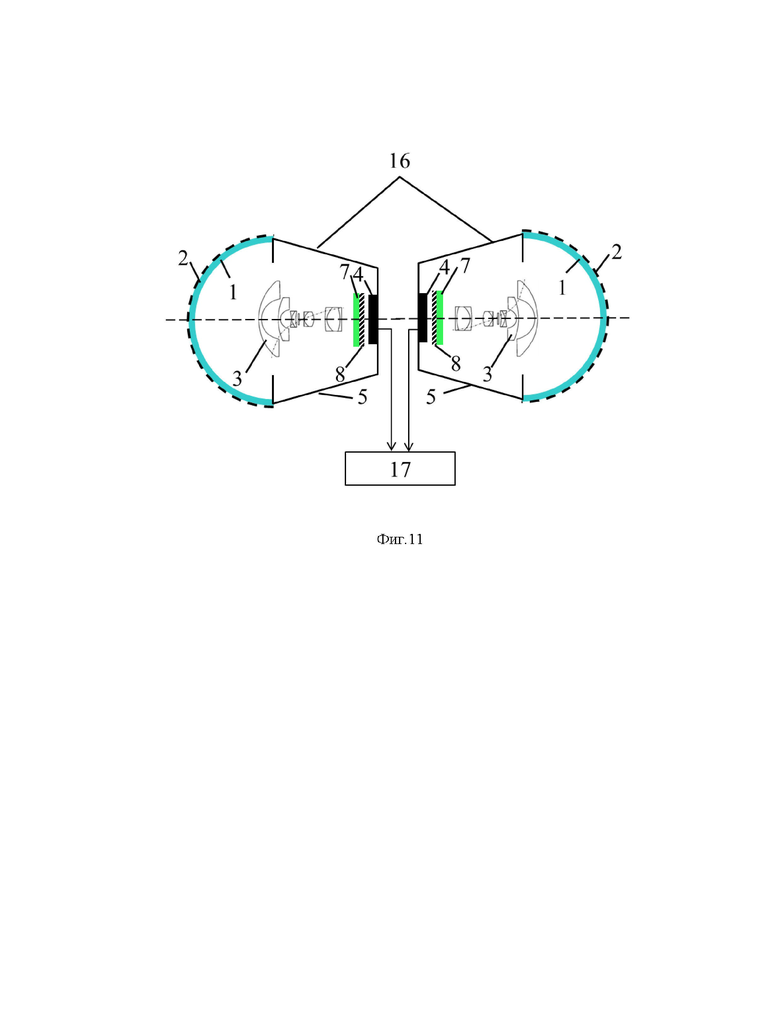
На фиг.11 представлены два полуцилиндра с поперечным расположением систем регистрации изображений с противоположными направлениями полуцилиндров и объективов, которые охватывают почти всю сферу.
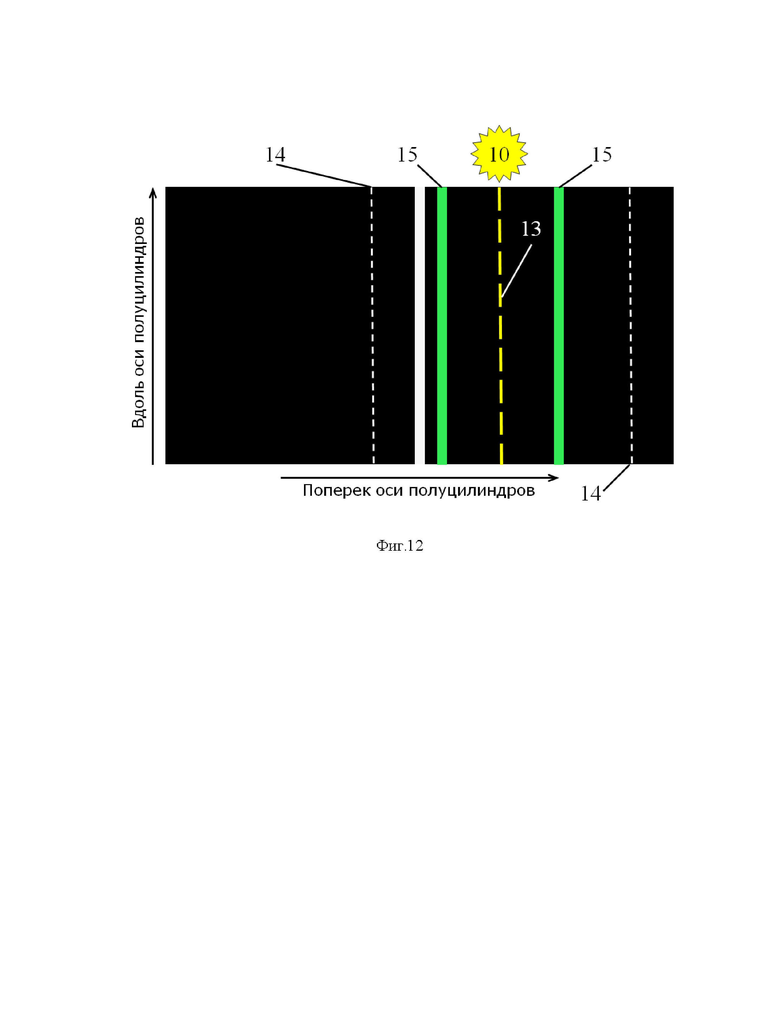
На фиг.12 представлены кадры с изображениями внутренних поверхностей двух противоположно ориентированных полуцилиндров. Показана ситуация  когда на изображениях присутствуют две яркие полосы 15, при этом обе они находятся на одном из полуцилиндров, а их изображения – в одном кадре, пунктирными линиями показаны центр 13 и границы 14 освещенной Солнцем 10 части цилиндра. Границы освещенной области расположены на обоих полуцилиндрах.
когда на изображениях присутствуют две яркие полосы 15, при этом обе они находятся на одном из полуцилиндров, а их изображения – в одном кадре, пунктирными линиями показаны центр 13 и границы 14 освещенной Солнцем 10 части цилиндра. Границы освещенной области расположены на обоих полуцилиндрах.
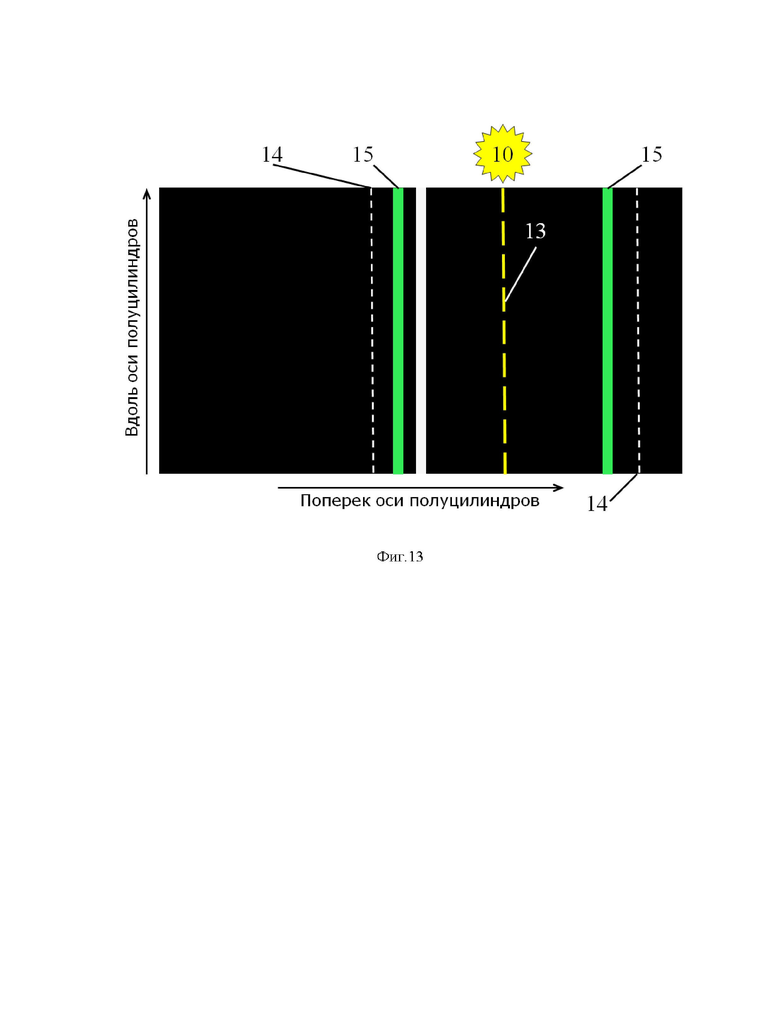
На фиг.13 представлены кадры с изображениями внутренних поверхностей двух противоположно ориентированных полуцилиндров. Показана ситуация когда на изображениях присутствуют две яркие полосы 15, при этом они находятся на разных полуцилиндрах, а их изображения – в разных кадрах, пунктирными линиями показаны центр 13 и границы 14 освещенной Солнцем 10 части цилиндра.
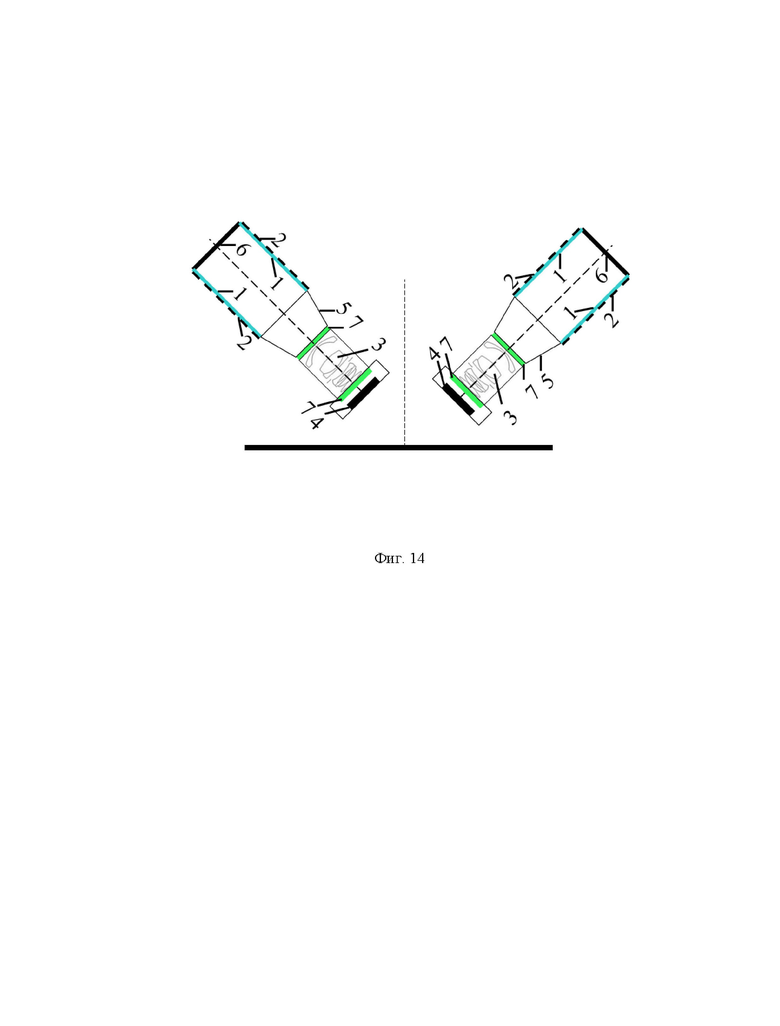
На фиг.14 показана оптимальная конфигурация солнечного датчика с двумя цилиндрическими интерференционными элементами с продольной регистрацией изображения. Оси цилиндрических элементов расположены в вертикальной плоскости к борту космического аппарата и отклонены от вертикальной линии на 45° в противоположные стороны.
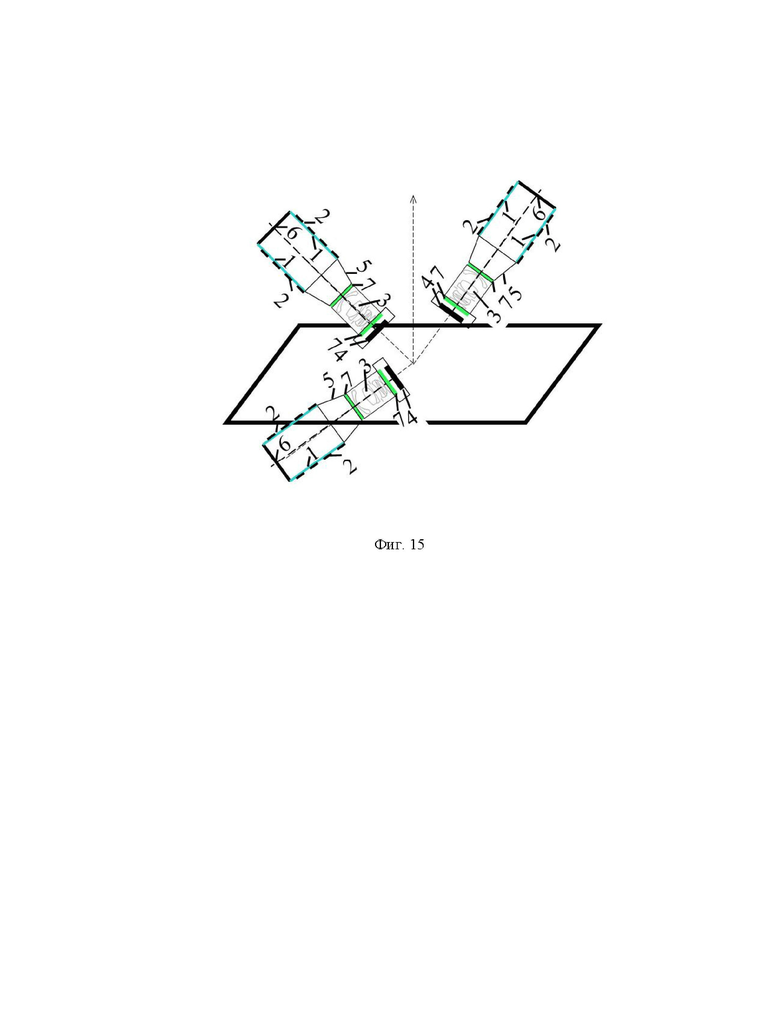
На фиг.15 показана оптимальная конфигурация солнечного датчика с тремя цилиндрическими интерференционными элементами с продольной регистрацией изображения. Оси цилиндрических элементов взаимно перпендикулярны друг к другу и представляют три ребра куба, выходящих из одной вершины. Главная диагональ этого куба направлена вертикально к борту космического аппарата. Оси цилиндрических элементов отклонены от вертикали на 54.7°. Проекции осей цилиндрических элементов на плоскость борта образуют углы 120°.
Позициями на чертежах обозначены:
1 – цилиндрическая прозрачная трубка – основа интерференционного элемента,
2 – интерференционный светофильтр или интерференционное покрытие, нанесенное на внешнюю сторону основы интерференционного элемента,
3 – объектив, обеспечивающий построение изображения внутренней поверхности трубки 1 на матричном приемнике излучения 4,
4 – матричный приемник излучения,
5 – светозащитный переходник, соединяющий основу интерференционного элемента 1 с объективом 3,
6 – непрозрачная пробка или крышка, закрывающая противоположный объективу 3 торец интерференционного элемента 1,
7 – отсекающий светофильтр,
8 – ослабляющий светофильтр,
9 – матирование или рассеивающее покрытие на внутренней стороне цилиндрической трубки 1,
10 – Солнце,
11 – неосвещенная половина поверхности интерференционного элемента,
12 – освещенная половина поверхности интерференционного элемента,
13 – центральная линия интерференционного элемента,
14 – границы освещенной Солнцем части цилиндра,
15 – полосы спектральной фильтрации,
16 – корпус солнечного датчика,
17 – блок управления,
18 – слой интерференционного покрытия.
Осуществление изобретения
Заявляемый интерференционный элемент выполнен в виде цилиндрической трубки с покрытием на боковой поверхности цилиндра.
Основа цилиндрического интерференционного элемента 1 представляет собой тонкостенную цилиндрическую трубку из прозрачного материала (например, из кварца, стекла, оргстекла или акрила). На внешнюю выпуклую поверхность цилиндрической трубки равномерно нанесено интерференционное покрытие (интерференционный светофильтр) 2, пропускающее излучение при его падении по нормали (прямая, проходящая через его продольную ось и перпендикулярная ей) к цилиндру в узкой полосе с центральной длиной волны λ0. Равномерность нанесения покрытия обеспечивает наличие постоянной структуры и равных характеристик в направлении нормали к боковой поверхности цилиндра во всех точках его поверхности. Внутренняя поверхность цилиндра матирована или снабжена покрытием, рассеивающим свет 9. В качестве такого покрытия могут быть использованы, например, молочное стекло, оргстекло или поликарбонат. Устройство интерференционного многослойного покрытия на внешней стороне цилиндрического интерференционного элемента показано на фигуре 2. В качестве материалов при устройстве такого покрытия могут быть использованы, например, кварц, флюорит, германий, сульфид цинка, различные металлы. При этом используют, по меньшей мере, два разных материала в составе одного многослойного покрытия. Толщина одного слоя покрытия составляет примерно одну четверную длины волны света, пропускаемой светофильтром. Точные значения зависят от профиля фильтра. Количество слоев составляет ориентировочно 10-50.
Цилиндрический интерференционный элемент снабжен системой регистрации изображения, формирующегося на его внутренней поверхности, которая имеет продольное или поперечное расположение относительно оси интерференционного элемента.
Конструкция цилиндрического интерференционного элемента с продольным расположением системы регистрации изображения показана на фигуре 8. Система регистрации представляет собой камеру, включающую объектив 3 и матричный приемник излучения 4, которая расположена на оси цилиндрического интерференционного элемента 1, с одного из его торцов. Для защиты от паразитного рассеянного света объектив камеры присоединен к интерференционному элементу (точнее, к его основе) с помощью непрозрачного переходника 5. Противоположный объективу торец интерференционного элемента закрыт непрозрачной пробкой или крышкой 6. Отсекающий светофильтр 7 установлен между объективом камеры 3 и основой интерференционного элемента 1 или внутри камеры между объективом 3 и матричным приемником излучения 4.
Предпочтительно, чтобы оптическая ось объектива 3 совпадала с продольной осью цилиндрического интерференционного элемента 1. Характеристики объектива 3 и длина цилиндрической трубки интерференционного элемента 1 выбраны такими, чтобы на матричном приемнике излучения 4 стало возможным получение резкого изображения внутренней поверхности интерференционного элемента 1. Это изображение для случая наличия двух ярких линий показано на фигуре 9. Оно соответствует развертке внутренней поверхности цилиндра, показанной на фигуре 5. При наличии резкого изображения ближнего торца интерференционного элемента 1 и пробки 6 на его дальнем конце, контроль соосности объектива и интерференционного элемента, а также последующая обработка получаемого изображения существенно упрощаются.
В ином варианте система регистрации изображения может быть ориентирована в поперечном направлении по отношению к цилиндрическому интерференционному элементу и его оптической оси. В таком случае основа интерференционного элемента выполнено в виде двух полуцилиндров, также образующих при соединении цилиндрическую трубку. Каждый полуцилиндр снабжен камерой, состоящей из объектива 3 и матричного приемника излучения 4, которая (камера) ориентирована на внутреннюю вогнутую сторону полуцилиндра, а ее оптическая ось направлена в середину полуцилиндра перпендикулярно его оси (см. фигуру 10). Полуцилиндр и камера или ее объектив соединены светозащитным переходником 5, закрывающим торцы и внутреннюю сторону полуцилиндра от паразитного рассеянного света. В этом варианте отсекающий светофильтр 7 предпочтительно разместить внутри камеры, между объективом 3 и матричным приемником излучения 4.
Поле зрения у конструкции интерференционного элемента с полуцилиндрами охватывает только примерно половину небесной сферы, в результате чего при некоторых положениях Солнца яркие полосы (или полоса) 15 оказываются расположенными за границами полуцилиндра и не регистрируются камерой. Эта проблема решается использованием двух идентичных конструкций, полуцилиндры и камеры которых направлены в противоположные стороны, как показано на фигуре 11. В таком устройстве полное изображение внутренней поверхности цилиндрического интерференционного элемента содержится в двух кадрах, построенных разными камерами.
Принцип функционирования заявляемого интерференционного элемента основан на зависимости длины волны излучения, пропускаемого интерференционным покрытием, от угла падения излучения.
Зависимость характеристик интерференционного покрытия от угла падения – центральной длины волны полосы пропускания  и ширины полосы пропускания
и ширины полосы пропускания  – получена на основе его геометрической структуры и характеристик материалов, используемых для нанесения интерференционных слоев и подтверждена экспериментально, в результате лабораторных измерений.
– получена на основе его геометрической структуры и характеристик материалов, используемых для нанесения интерференционных слоев и подтверждена экспериментально, в результате лабораторных измерений.
Лучи Солнца, падающие на цилиндрический интерференционный элемент и освещающие его внешнюю поверхность, можно считать параллельными, в результате чего освещенной оказывается половина внешней поверхности цилиндрического интерференционного элемента, при этом вторая половина поверхности цилиндра будет находиться в тени. Углы падения лучей на освещенную часть меняются от угла  , где
, где  – угол между продольной осью цилиндрического элемента и направлением на Солнце, до
– угол между продольной осью цилиндрического элемента и направлением на Солнце, до  на границах освещенной части цилиндрического элемента. Минимальное значение угла падения
на границах освещенной части цилиндрического элемента. Минимальное значение угла падения  достигается на линии пересечения плоскости проходящей через ось цилиндрического элемента и Солнце с поверхностью цилиндрического элемента, а максимальное значение
достигается на линии пересечения плоскости проходящей через ось цилиндрического элемента и Солнце с поверхностью цилиндрического элемента, а максимальное значение  – на двух границах освещенной части цилиндра. Три эти линии параллельны оси цилиндрического элемента.
– на двух границах освещенной части цилиндра. Три эти линии параллельны оси цилиндрического элемента.
Углы падения лучей на освещенную поверхность цилиндрического элемента одинаковы вдоль линий, параллельных оси цилиндра. Значение угла падения  на этих линиях равно
на этих линиях равно
 , (1)
, (1)
здесь  – угол между плоскостью, проходящей через ось цилиндра и Солнце, и плоскостью, проходящей через ось цилиндра и рассматриваемую линию. На этих линиях углы падения принимают значения в интервале
– угол между плоскостью, проходящей через ось цилиндра и Солнце, и плоскостью, проходящей через ось цилиндра и рассматриваемую линию. На этих линиях углы падения принимают значения в интервале 
 .
.
В точке падения излучения на поверхность цилиндра интерференционный светофильтр 2, нанесенный на внешнюю выпуклую поверхность основы цилиндрического элемента 1, пропускает свет в узкой спектральной полосе с центральной длиной волны  (см. фигуру 3). Этот свет проходит через тонкую прозрачную стенку основы цилиндрического интерференционного элемента 1 и рассеивается на ее внутренней вогнутой поверхности, которая матирована или покрыта рассеивающим свет покрытием 9.
(см. фигуру 3). Этот свет проходит через тонкую прозрачную стенку основы цилиндрического интерференционного элемента 1 и рассеивается на ее внутренней вогнутой поверхности, которая матирована или покрыта рассеивающим свет покрытием 9.
Из точек, расположенных за пределами цилиндрической трубки на расстоянии меньшем половины ее внутреннего диаметра от ее продольной оси, видна вся внутренняя поверхность цилиндрического элемента, на ней (на трубке) будет наблюдаться картина, показанная на фигуре 4, на которой представлена развертка внутренней поверхности цилиндрического элемента. Половина внутренней поверхности цилиндра соответствует той части его внешней поверхности, которая не освещена Солнцем, поэтому она имеет низкую яркость и на фигуре 4 показана черным цветом. Границы темной полосы параллельны оси цилиндрического элемента.
Вторая половина внутренней поверхности цилиндра яркая, поскольку соответствует освещенной Солнцем части внешней поверхности цилиндрического элемента. Длина волны излучения этой полосы симметричным образом меняется от центра к краям в соответствии с зависимостью  Максимальная длина волны излучения
Максимальная длина волны излучения  достигается в центре полосы, а к краям длина волны излучения уменьшается. Если угол
достигается в центре полосы, а к краям длина волны излучения уменьшается. Если угол  т.е. лучи Солнца падают на цилиндрический элемент перпендикулярно его оси, то
т.е. лучи Солнца падают на цилиндрический элемент перпендикулярно его оси, то 
Если применить к изображению, показанному на фигуре 4, спектральную фильтрацию, т.е. пропустить излучение через отсекающий светофильтр, пропускающий излучение в узкой полосе с центральной длиной волны  то наблюдаемая картина изменится. Отсекающий светофильтр пропустит только излучение с длиной волны
то наблюдаемая картина изменится. Отсекающий светофильтр пропустит только излучение с длиной волны
 (2)
(2)
т.е. только те лучи, которые имеют угол падения на цилиндрический интерференционный элемент  удовлетворяющий соотношению
удовлетворяющий соотношению
(3)
или
 (4)
(4)
где  – зависимость (функция) обратная
– зависимость (функция) обратная  Поскольку интерференционный светофильтр (покрытие), нанесенный на внешнюю поверхность цилиндрического элемента, и отсекающий светофильтр имеют полосы пропускания конечной ширины, то формулы (2)-(4) имеют приближенный характер, а величины
Поскольку интерференционный светофильтр (покрытие), нанесенный на внешнюю поверхность цилиндрического элемента, и отсекающий светофильтр имеют полосы пропускания конечной ширины, то формулы (2)-(4) имеют приближенный характер, а величины  и
и  являются некоторыми характерными значениями пропускаемых длин волн и углов падения. После отсекающего светофильтра вместо освещенной половины цилиндра можно наблюдать узкие яркие полосы, излучающие на длине волны
являются некоторыми характерными значениями пропускаемых длин волн и углов падения. После отсекающего светофильтра вместо освещенной половины цилиндра можно наблюдать узкие яркие полосы, излучающие на длине волны  На фигурах 5, 6 и 7 показаны возможные варианты, различающиеся числом ярких полос.
На фигурах 5, 6 и 7 показаны возможные варианты, различающиеся числом ярких полос.
Если  то наблюдаются две яркие полосы (фигура 5), расположенные симметрично относительно центрально продольной линии освещенного полуцилиндра на которой угол падения лучей Солнца на цилиндр был минимальным
то наблюдаются две яркие полосы (фигура 5), расположенные симметрично относительно центрально продольной линии освещенного полуцилиндра на которой угол падения лучей Солнца на цилиндр был минимальным  Эти полосы будут сближаться между собой и приближаться к продольной центральной линии по мере уменьшения угла
Эти полосы будут сближаться между собой и приближаться к продольной центральной линии по мере уменьшения угла  между продольной осью цилиндрического элемента и направлением на Солнце.
между продольной осью цилиндрического элемента и направлением на Солнце.
Если  то наблюдается одна полоса, вдоль центральной линии освещенного Солнцем полуцилиндра (фигура 6). Это предельный случай предыдущей ситуации, показанной на фигуре 5, когда две яркие полосы вплотную сближаются и сливаются друг с другом. Знак примерного равенства указывает на то, что ситуация с одной линией существует в некотором узком диапазоне углов
то наблюдается одна полоса, вдоль центральной линии освещенного Солнцем полуцилиндра (фигура 6). Это предельный случай предыдущей ситуации, показанной на фигуре 5, когда две яркие полосы вплотную сближаются и сливаются друг с другом. Знак примерного равенства указывает на то, что ситуация с одной линией существует в некотором узком диапазоне углов  что связано с конечной шириной ярких полос, возникающих после спектральной фильтрации отсекающим светофильтром.
что связано с конечной шириной ярких полос, возникающих после спектральной фильтрации отсекающим светофильтром.
Наконец, при  полосы вообще не будут наблюдаться, как показано на фигуре 7.
полосы вообще не будут наблюдаться, как показано на фигуре 7.
Освещенная Солнцем часть цилиндрического интерференционного элемента в общем случае всегда выходит за пределы одного полуцилиндра. Но яркие полосы, возникающие после спектральной фильтрации изображения, могут находиться на одном полуцилиндре и, соответственно, фиксироваться одной камерой (см. фигуру 12), либо на разных полуцилиндрах и фиксироваться разными камерами (см. фигуру 13). Фигуры 12 и 13 соответствуют случаю когда на внутренней поверхности полного (т.е. не разделенного на две части) цилиндрического интерференционного элемента после спектральной фильтрации образуются две яркие полосы.
Для того, чтобы яркие линии на изображениях, полученных в конструкции с полуцилиндром, имели вид прямолинейных отрезков, как показано на фигуре 10, используют объективы с низкой дисторсией, т.е. не очень широким полем зрения.
Заявляемый солнечный датчик в одном из вариантов реализации включает, по меньшей мере два цилиндрических интерференционных элемента описанной выше конструкции, оси цилиндров которых расположены в вертикальной плоскости под 45° к вертикали (фигура 14). Иной вариант реализации солнечного датчика включает три интерференционных элемента, при этом оптимальная конфигурация, характеризующаяся наиболее высокой точностью определения направления на Солнце, достигается, когда оси цилиндров направлены вдоль ребер нижней вершины куба с вертикальной главной диагональю (фигура 15).
Таким образом, заявляемый солнечный датчик содержит корпус, а также, по меньшей мере, два цилиндрических интерференционных элемента с продольно расположенными системами регистрации изображений или четыре полуцилиндрических интерференционных элемента с поперечно расположенной системой регистрации, при этом каждый из элементов включает:
• основу интерференционного элемента –цилиндрическую трубку 1 (для системы с продольно регистрацией изображения) или два тонкостенных прозрачных полуцилиндра (в случае использования системы с поперечной регистрацией изображения); вогнутая внутренняя сторона основы матирована или на нее нанесено рассеивающее свет покрытие 9;
• интерференционное покрытие 2, нанесенное на внешнюю сторону основы;
• объектив камеры 3;
• матричный приемник излучения камеры 4;
• светозащитный переходник 5, соединяющий объектив камеры 3 с одним из концов цилиндрической трубки 1 или с полуцилиндром;
• непрозрачная крышка или пробка 6, установленная на конце цилиндрической трубки 1 противоположном тому, к которому присоединен объектив камеры 3 (только для систем с продольной регистрацией изображения);
• отсекающий светофильтр 7;
• ослабляющий светофильтр 8 (который используется в случае, если изображения полос на матричном приемнике излучения 4 слишком яркое, что приводит к переполнению пикселей).
Интерференционные элементы прикреплены к корпусу датчика 16. Также в корпусе расположен блок управления, соединенный каналами передачи команд управления и получения изображений с каждым интерференционным элементом.
Характеристики интерференционного покрытия 2, длина волны пропускания  отсекающего светофильтра 8 и углы между продольными осями цилиндрических интерференционных элементов выбраны таким образом, чтобы для устройства с двумя цилиндрическими интерференционными элементами выполнялось условие (9), а для устройства с тремя цилиндрическими интерференционными элементами выполнялись условия (10).
отсекающего светофильтра 8 и углы между продольными осями цилиндрических интерференционных элементов выбраны таким образом, чтобы для устройства с двумя цилиндрическими интерференционными элементами выполнялось условие (9), а для устройства с тремя цилиндрическими интерференционными элементами выполнялись условия (10).
Солнечный датчик с тремя цилиндрическими интерференционными элементами работает следующим образом.
Датчик размещают на борту КА с обеспечением освещения Солнцем поверхностей его интерференционных элементов. Солнце 10 освещает обращенные к нему части поверхностей трех цилиндрических элементов 1. Интерференционное покрытие 2 пропускает излучение с длиной волны  в середине освещенной Солнцем части цилиндра 1, в остальных освещенных точках цилиндра пропускает излучение с более короткими длинами волн
в середине освещенной Солнцем части цилиндра 1, в остальных освещенных точках цилиндра пропускает излучение с более короткими длинами волн  , которые убывают по мере удаления от середины освещенной Солнцем части цилиндра 1. Излучение Солнца, пропущенное интерференционным покрытием 2, проходит сквозь тонкую прозрачную стенку основы цилиндрического интерференционного элемента. Матирование или рассеивающее покрытие на внутренней поверхности основы 1 рассеивает прошедшее излучение. Таким образом, цвет излучения, испускаемого (рассеиваемого) внутренней поверхностью цилиндрической трубки 1, зависит от расстояния между наблюдаемой точкой внутренней поверхности и серединой освещенной Солнцем части цилиндрической трубки 1.
, которые убывают по мере удаления от середины освещенной Солнцем части цилиндра 1. Излучение Солнца, пропущенное интерференционным покрытием 2, проходит сквозь тонкую прозрачную стенку основы цилиндрического интерференционного элемента. Матирование или рассеивающее покрытие на внутренней поверхности основы 1 рассеивает прошедшее излучение. Таким образом, цвет излучения, испускаемого (рассеиваемого) внутренней поверхностью цилиндрической трубки 1, зависит от расстояния между наблюдаемой точкой внутренней поверхности и серединой освещенной Солнцем части цилиндрической трубки 1.
Объектив камеры 3 формирует изображение внутренней поверхности цилиндрической трубки 1 на матричном приемнике излучения 4. Светозащитный переходник 5 и непрозрачная крышка 6 предназначены для защиты объектива 3 и матричного приемника излучения камеры 4 от паразитного рассеянного света.
После прохождения через отсекающий светофильтр 7, расположенный либо между отрезком трубки 1 и объективом камеры 3, либо между объективом камеры 3 и матричным приемником излучения 4, который пропускает излучение в узкой полосе с центральной длиной волны  изображения внутренней поверхности отрезков трубок 1, созданные объективами 3 на матричных приемниках излучения камер 4, примут вид одной или двух ярких полос на темном или слабо светящемся фоне. С учетом выполнения условий (10), связывающих углы между направлениями осей отрезков цилиндрических трубок 1 и угол полураствора конуса невидимости цилиндрического интерференционного элемента, яркие полосы будут регистрироваться, по меньшей мере, на двух из трех изображений на матричных приемниках излучения 4.
изображения внутренней поверхности отрезков трубок 1, созданные объективами 3 на матричных приемниках излучения камер 4, примут вид одной или двух ярких полос на темном или слабо светящемся фоне. С учетом выполнения условий (10), связывающих углы между направлениями осей отрезков цилиндрических трубок 1 и угол полураствора конуса невидимости цилиндрического интерференционного элемента, яркие полосы будут регистрироваться, по меньшей мере, на двух из трех изображений на матричных приемниках излучения 4.
Поскольку Солнце 10 является ярким источником излучения, то в изображениях, получаемых на матричных приемниках излучения 4, может происходить переполнение светочувствительных элементов матриц (пикселей), которое искажает полученное изображение и мешает его дальнейшей обработке. Для предотвращения такого искажения в конструкцию устройства дополнительно включен ослабляющий светофильтр 8, поглощающий часть излучения Солнца. Ослабляющий светофильтр 8 может быть установлен там же, где и отсекающий светофильтр 7 (см. выше).
Блок управления 17 направляет камерам сигнал на проведение одновременной экспозиции изображений на всех камерах и считывает кадры, содержащий оцифрованные изображения, с выходов матричных приемников излучения 4.
С каждым цилиндрическим интерференционным элементом (i) связана своя система координат, в которой ось  направлена вдоль оптической оси объектива камеры 3 и продольной оси цилиндрического элемента 1 от камеры к цилиндрическому элементу, а оси
направлена вдоль оптической оси объектива камеры 3 и продольной оси цилиндрического элемента 1 от камеры к цилиндрическому элементу, а оси  и
и  перпендикулярны ей и направлены вдоль строк и столбцов матричного приемника излучения 4. Индекс i обозначает номер цилиндрического интерференционного элемента. С осями XYZi связаны единичные векторы
перпендикулярны ей и направлены вдоль строк и столбцов матричного приемника излучения 4. Индекс i обозначает номер цилиндрического интерференционного элемента. С осями XYZi связаны единичные векторы 
 и
и  образующие правый ортогональный базис. В памяти блока управления 17 хранятся 3×3 матрицы поворотов
образующие правый ортогональный базис. В памяти блока управления 17 хранятся 3×3 матрицы поворотов  связывающие системы координат цилиндрических интерференционных элементов с системой координат устройства 16 (т.е. солнечного датчика в целом).
связывающие системы координат цилиндрических интерференционных элементов с системой координат устройства 16 (т.е. солнечного датчика в целом).
Затем обрабатывают изображения, определяя изображения, содержащие одну или две яркие полосы. Блок управления 17 строит единичные векторы  и
и  , направленные вдоль ярких полос от центра кадра наружу и проходящие максимально близко к серединам полос.
, направленные вдоль ярких полос от центра кадра наружу и проходящие максимально близко к серединам полос.
Затем, если изображение содержит две яркие полосы, то вычисляют нормированную на единицу сумму этих векторов  , а если яркая полоса одна, то в качестве вектора
, а если яркая полоса одна, то в качестве вектора  берется сам направленный вдоль нее вектор
берется сам направленный вдоль нее вектор  Вектор перпендикулярен вектору
Вектор перпендикулярен вектору 
Полуплоскости, в которых расположен центр Солнца, в системах координат, связанных с цилиндрическими интерференционными элементами, описываются уравнением
 где
где  . (11)
. (11)
А единичный вектор нормали к этим полуплоскостям задается формулой
 . (12)
. (12)
Нормирование результата векторного перемножения в формуле (12) не требуется, поскольку векторы и  перпендикулярны друг другу.
перпендикулярны друг другу.
Векторы нормалей переводятся в систему координат устройства с помощью соотношения
 (13)
(13)
здесь верхний индекс «Т» означает операцию транспонирования вектора, а символ «~» над левой частью формулы, что результат представлен в системе координат устройства.
Если яркие полосы присутствуют только на двух изображениях из трех (например, на 1 и 2), то единичный вектор направления на Солнце определяем по формуле
, (14)
как линию пересечения этих двух полуплоскостей.
Если яркие полосы присутствуют на всех трех изображениях, то сначала попарно вычисляются вектора пересечения плоскостей
(15)
а затем полученные вектора складываются и нормируются на единицу
. (16)
Полученный вектор  характеризует направление на Солнце и является результатом, который выдает блок управления 17.
характеризует направление на Солнце и является результатом, который выдает блок управления 17.
Солнечный датчик с двумя цилиндрическими интерференционными элементами работает аналогично датчику с тремя цилиндрическими интерференционными элементами с некоторыми отличиями, которые заключаются в изображениях, получаемых на матричных приемниках излучения 4. Поскольку для солнечного датчика с двумя цилиндрическими интерференционными элементами необходимо выполнение условий (9), связывающих угол между направлениями осей цилиндрических интерференционных элементов и угол полураствора конуса невидимости цилиндрического интерференционного элемента, яркие полосы будут регистрироваться, по меньшей мере, на одном из двух изображений, получаемых на матричных приемниках излучения 4.
Если яркие полосы регистрируются на двух изображениях с матричных приемников излучения 4, то дальнейшее функционирование датчика с двумя цилиндрическими интерференционными элементами происходит так же, как рассмотренного выше устройства с тремя цилиндрическими интерференционными элементами в случае присутствия ярких полос только на двух изображениях с матричных приемников излучения его камер.
Если яркие полосы регистрируются только на одном изображении с матричного приемника излучения 4, то дальнейшее функционирование датчика с двумя цилиндрическими интерференционными элементами происходит следующим образом. Блок управления 17 обрабатывает изображение, содержащее яркие полосы. Если ярких полос две, то строятся единичные векторы  и
и  направленные вдоль ярких полос от центра кадра наружу и проходящие максимально близко к серединам полос. Затем вычисляется нормированная на единицу сумма этих векторов
направленные вдоль ярких полос от центра кадра наружу и проходящие максимально близко к серединам полос. Затем вычисляется нормированная на единицу сумма этих векторов  , а если яркая полоса одна, то в качестве вектора
, а если яркая полоса одна, то в качестве вектора  берется сам направленный вдоль нее вектор
берется сам направленный вдоль нее вектор  Вектор
Вектор  перпендикулярен базисному вектору
перпендикулярен базисному вектору  системы координат цилиндрического интерференционного элемента, изображение которого содержало яркие полосы.
системы координат цилиндрического интерференционного элемента, изображение которого содержало яркие полосы.
Полуплоскость, в которой расположен центр Солнца, в системе координат, связанной с тем цилиндрическим интерференционным элементом, на изображении которого присутствовали яркие полосы, описываются уравнением
 где
где  . (17)
. (17)
Угол  между направлением на Солнце и базисным вектором
между направлением на Солнце и базисным вектором  вычисляется по формулам (4)-(6) (точность определения угла ниже, чем направления единичного вектора
вычисляется по формулам (4)-(6) (точность определения угла ниже, чем направления единичного вектора  ). Это позволяет найти коэффициенты
). Это позволяет найти коэффициенты  и
и  в формуле (17):
в формуле (17):  Соответственно, вектор направления на Солнце в системе координат цилиндрического интерференционного элемента будет иметь вид
Соответственно, вектор направления на Солнце в системе координат цилиндрического интерференционного элемента будет иметь вид
 . (18)
. (18)
Этот вектор переводится в систему координат устройства с помощью соотношения
 (19)
(19)
здесь верхний индекс «Т» означает операцию транспонирования вектора, а символ «~» над левой частью формулы, что результат представлен в системе координат устройства. Полученный вектор характеризует направление на Солнце и является результатом, который выдает блок управления 17. Таким образом, отличия в реализации способа определения направления на Солнце при использовании двух вариантов конструкции солнечного датчика заключаются исключительно в корректировке используемого математического аппарата при выполнении расчетного шага.
Примеры конкретной реализации
Пример 1
На фигуре 1 показана зависимость полосы пропускания опытного образца цилиндрического интерференционного элемента с 18-слойным интерференционным покрытием от угла падения излучения. Покрытие сформировано на кварцевой (SiO2) цилиндрический трубке последовательным чередованием слоев из оптического стекла марки ТФ10 (коэффициент преломления 1,81) и кварца (SiO2, коэффициент преломления 1,54). Внешний диаметр цилиндрической трубки составлял 25 мм, толщина стенки цилиндра – 2 мм. Толщины слоев интерференционного покрытия составляли около 0.175 мкм, полная толщина интерференционного покрытия составила 3,2 мкм. Из фигуры видно, что покрытие пропускает излучение с наибольшей длиной волны при нормальном падении, а по мере увеличения угла падения излучения на фильтр центральная длина волны пропускаемого излучения уменьшается. Зависимость пропускаемой длины волны от угла падения имеет монотонный характер – бóльшим углам падения соответствуют меньшие длины волн пропускаемого фильтром излучения. Смещение полосы пропускания покрытия достаточно велико – разность центральных длин волн полос пропускания при углах падения 0° и 60° более чем на порядок величины превосходит ширину полосы пропускания светофильтра на половине интенсивности от максимума при нормальном падении излучения. Установлено, что по мере роста угла падения ширина полосы пропускания покрытия растет, а при больших углах падения (45° и 60°) его профиль становится несимметричным и даже может стать «двугорбым». Последнее связано с различием взаимодействия интерференционного светофильтра со светом, у которого плоскость поляризации совпадает с плоскостью падения излучения или перпендикулярна ей.
Пример 2 (определение направления на Солнце по изображению двух полос только с одного полного цилиндрического интерференционного элемента)
На полном изображении внутренней поверхности цилиндрического интерференционного элемента наблюдаются две яркие полосы. Две полуплоскости, проходящие через ось цилиндрического элемента и середины ярких полос, образуют двугранный угол, линейный угол которого равен  При этом вектор направления на Солнце будет лежать в полуплоскости, являющейся биссектрисой этого двугранного угла и образующей с каждой из его граней линейные углы
При этом вектор направления на Солнце будет лежать в полуплоскости, являющейся биссектрисой этого двугранного угла и образующей с каждой из его граней линейные углы 
Середины ярких полос можно определить различными способами, как среднее значение, медиану или моду распределения интенсивности излучения, среднее расстояние между линиями квантилей заданного уровня и т.д. Все эти средние значения (положения) смещены друг относительно друга. Однако, учитывая симметрию распределения интенсивности излучения в ярких полосах относительно искомой средней линии освещенной Солнцем половины цилиндрического интерференционного элемента, можно использовать любое из перечисленных определений середины полосы, поскольку их систематические смещения будут иметь противоположные знаки и будут компенсировать друг друга.
Кроме этого, зная величину угла  из формул (1) и (4) находят
из формул (1) и (4) находят
 ,
,
а угол  равен
равен
 или
или 
Таким образом, по изображению только с одного полного цилиндрического интерференционного элемента, содержащему две яркие полосы, получают два возможных вектора направления на Солнце.
При этом,
1. Если продольная ось цилиндрического интерференционного элемента образует достаточно большой угол с плоскостью внешней поверхности КА на которой установлен солнечный датчик, то с большой вероятностью один из углов  задаваемый формулой (6), будет указывать на точку ниже плоскости внешней поверхности КА, и может быть отброшен.
задаваемый формулой (6), будет указывать на точку ниже плоскости внешней поверхности КА, и может быть отброшен.
2. Положение полуплоскости биссектрисы двугранного угла определяется с бóльшей точностью, чем значение угла  задающее направление на Солнце в этой полуплоскости. Это связано с тем, что систематические погрешности определения середин ярких полос при определении положения биссектрисы двумерного угла компенсируют друг друга, а при определении величины этого двумерного угла
задающее направление на Солнце в этой полуплоскости. Это связано с тем, что систематические погрешности определения середин ярких полос при определении положения биссектрисы двумерного угла компенсируют друг друга, а при определении величины этого двумерного угла  – складываются. Помимо этого, при вычислении угла
– складываются. Помимо этого, при вычислении угла  используются зависимости
используются зависимости  и
и  которые определяются эмпирически или на основе предварительного расчета с конечной точностью.
которые определяются эмпирически или на основе предварительного расчета с конечной точностью.
Пример 3 (определение направления на Солнце по изображению двух слившихся в одну полос только с одного полного цилиндрического интерференционного элемента)
Одна яркая полоса – это предельный случай двух ярких полос, сблизившихся вплотную и слившихся. Солнце находится в полуплоскости, проходящей через ось цилиндрического элемента и середину яркой полосы. Слияние полос соответствует случаю  откуда из формулы (6) получаем угол
откуда из формулы (6) получаем угол 
Как и в случае двух полос (Пример 2), положение полуплоскости, в которой лежит Солнце, определяется с бóльшей точностью, чем значение угла  Значение этого угла можно уточнить, используя информацию о ширине наблюдаемой полосы. Если она больше, чем ширина каждой из двух полос, то эти полосы еще не до конца слились и
Значение этого угла можно уточнить, используя информацию о ширине наблюдаемой полосы. Если она больше, чем ширина каждой из двух полос, то эти полосы еще не до конца слились и  а угол
а угол  несколько больше, чем по формуле (7) при знаке минус. В противном случае, когда полоса уже, чем, когда их две, то центры полос уже зашли друг за друга и мы видим только оставшиеся края (крылья) слившихся ярких полос. В этом случае угол будет несколько меньше, чем по формуле (7) при знаке минус.
несколько больше, чем по формуле (7) при знаке минус. В противном случае, когда полоса уже, чем, когда их две, то центры полос уже зашли друг за друга и мы видим только оставшиеся края (крылья) слившихся ярких полос. В этом случае угол будет несколько меньше, чем по формуле (7) при знаке минус.
Также как и в случае двух полос (Пример 2), если продольная ось цилиндрического интерференционного элемента образует достаточно большой угол с плоскостью внешней поверхности КА, то с большой вероятностью один из углов  задаваемый формулой (7), будет указывать на точку ниже плоскости внешней поверхности КА, и может быть отброшен.
задаваемый формулой (7), будет указывать на точку ниже плоскости внешней поверхности КА, и может быть отброшен.
Пример 4 (отсутствие на изображении внутренней поверхности одного цилиндрического интерференционного элемента ярких полос)
Когда не наблюдается ни одной яркой полосы, это означает реализацию одной из двух ситуаций.
1. Цилиндрический интерференционный элемент не освещен Солнцем, например, он затмевается элементами конструкции КА или КА находится в тени Земли. В этой ситуации не может функционировать никакой солнечный датчик.
2. Цилиндрический интерференционный элемент освещен Солнцем. В этом случае направление на Солнце находится внутри одного из двух противоположно направленных конусов невидимости, оси которых совпадают с осью цилиндрического элемента, а углы полурастворов равны  Этому случаю соответствуют следующие величины углов
Этому случаю соответствуют следующие величины углов
 или
или  .
.
Таким образом, одного полного цилиндрического интерференционного элемента недостаточно для реализации назначения солнечного датчика, поскольку есть положения Солнца (близко к оси цилиндрического элемента, внутри конуса невидимости), при котором солнечный датчик с одним цилиндрическим элементом не функционирует.
Пример 5 (определение направления на Солнце посредством использования солнечного датчика, включающего два цилиндрических интерференционных элемента, оси которых ориентированы по-разному)
В состав солнечного датчика входят два цилиндрических интерференционных элемента, оси которых направлены под углом  друг к другу, при этом на каждом из них наблюдаются две или одна яркие полосы. По каждому из этих элементов определяют полуплоскость, в которой находится Солнце, согласно Примерам 2 и 3. Направление на Солнце представляет собой линию пересечения этих полуплоскостей. При этом величины углов
друг к другу, при этом на каждом из них наблюдаются две или одна яркие полосы. По каждому из этих элементов определяют полуплоскость, в которой находится Солнце, согласно Примерам 2 и 3. Направление на Солнце представляет собой линию пересечения этих полуплоскостей. При этом величины углов  между осями цилиндрических элементов и направлением на Солнце не используются. При этом оба угла, задающих направление на Солнце, определяются с одинаковой и высокой точностью.
между осями цилиндрических элементов и направлением на Солнце не используются. При этом оба угла, задающих направление на Солнце, определяются с одинаковой и высокой точностью.
Возможна ситуация, когда на одном из цилиндрических элементов солнечного датчика не наблюдаются яркие полосы, т. е. когда Солнце находится близко к оси этого цилиндрического элемента, внутри конуса с углом полураствора (см. пункт Пример 4). На втором цилиндрическом интерференционном элементе при этом наблюдаются яркие полосы, и направление на Солнце определяют по нему согласно Примеру 2, если ярких полос две, или согласно Примеру 3, если полоса одна. Солнечный датчик продолжает функционировать, хотя точность определения направления на Солнце снижается до уровня солнечного датчика с одним цилиндрическим интерференционным элементом.
Для сохранения работоспособности солнечного датчика при любом положении Солнца на небе (исключая случаи попадания в тень солнечного датчика или КА в целом) необходимо, чтобы конусы невидимости двух цилиндрических интерференционных элементов не пересекались и яркие полосы присутствовали хотя бы на одном из них. Это условие выполняется, если угол между осями цилиндрических элементов достаточно велик
 .
.
Интерференционное покрытие цилиндрического элемента с характеристиками, показанными на фигуре 1 с  нм, а отсекающий светофильтр пропускает излучение с длиной волны
нм, а отсекающий светофильтр пропускает излучение с длиной волны  нм, при этом конусы невидимости имеют углы полураствора
нм, при этом конусы невидимости имеют углы полураствора 
Таким образом, солнечный датчик с двумя цилиндрическими интерференционными элементами обладает максимальной эффективностью, когда угол между осями цилиндрических элементов будет превышать 
Пример 6 (определение направления на Солнце посредством использования солнечного датчика, включающего три цилиндрических интерференционных элемента, оси которых ориентированы по-разному)
В состав солнечного датчика входят три цилиндрических интерференционных элемента, которые помечены индексами 1, 2 и 3, соответственно. Их оси направлены под углами 
 и
и  друг к другу.
друг к другу.
Для этих углов одновременно выполняют условия

При этом конусы невидимости цилиндрических элементов не пересекаются, Солнце может либо находиться в одном из них, либо не попадать ни в один.
Для данного примера возможны следующие варианты:
1) на двух цилиндрических элементах присутствуют яркие полосы, при этом направление на Солнце определяют, как пересечение полуплоскостей, проходящих через ось соответствующего цилиндрического элемента (с изображением) и центр Солнца в соответствии с Примером 5.
2) на всех трех цилиндрических элементах присутствуют яркие полосы, при этом направление на Солнце определяют, как пересечение полуплоскостей, проходящих через ось соответствующего цилиндрического элемента и центр Солнца с учетом усреднения полученных направлений или как оптимальное направление на центр Солнца, лежащее ближе всего ко всем построенным плоскостям, например, методом наименьших квадратов.
Таким образом, согласно заявляемому способу с помощью заявляемого солнечного датчика, выполненного на основе заявляемого интерференционного элемента, включающего систему регистрации изображений, получают изображения нескольких светящихся полос (линий), положение которых однозначно связано с геометрией интерференционного элемента и с направлением на Солнце. Изображения полос проецируются на матричные фотоприемники интерференционного элемента. О положении Солнца на небесной сфере судят по взаимному положению спроецированных светящихся полос на фотоприемнике.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ СОЛНЦА И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2013 |
|
RU2555216C2 |
| Устройство измерения угловых координат солнца | 2018 |
|
RU2683444C1 |
| ЛАЗЕРНЫЙ ПРОФИЛОМЕТР ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПРОФИЛЯ ПОВЕРХНОСТИ | 2016 |
|
RU2650840C1 |
| ОПТИЧЕСКИЙ СОЛНЕЧНЫЙ ДАТЧИК | 2013 |
|
RU2517979C1 |
| Способ и система защиты детектора канала оптической связи в системах космической оптической связи от засветки точечными и протяженными источниками света | 2020 |
|
RU2751989C1 |
| ПРИБОР ТРЕХОСНОЙ ОРИЕНТАЦИИ НА СОЛНЦЕ | 1995 |
|
RU2127421C1 |
| УСТРОЙСТВО ДЛЯ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ПАРАМЕТРОВ ОРИЕНТАЦИИ ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2016 |
|
RU2650730C1 |
| СОЛНЕЧНЫЙ ВЕКТОР-МАГНИТОГРАФ | 2009 |
|
RU2406982C1 |
| СПОСОБ ДОСТАВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2541505C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПЛАТФОРМОЙ КОНЦЕНТРАТОРНЫХ СОЛНЕЧНЫХ МОДУЛЕЙ | 2015 |
|
RU2611571C1 |
Изобретение относится к космической навигации и может использоваться для оперативного точного определения направления на Солнце. Солнечный датчик включает корпус, внутри которого закреплены по меньшей мере два интерференционных элемента с продольным или поперечным расположением системы регистрации изображения, и блок управления, соединенный со всеми интерференционными элементами и выполненный с возможностью обработки данных, получаемых от интерференционных элементов. Способ измерения угловых координат Солнца включает размещение солнечного датчика, включающего по меньшей мере два интерференционных элемента, на борту космического аппарата с обеспечением освещения Солнцем внешних поверхностей интерференционных элементов, затем фиксацию объективами камер изображений внутренней поверхности основы интерференционного элемента с формированием этих изображений на соответствующих матричных приемниках излучения каждого интерференционного элемента, направление оцифрованных изображений с выходов матричных приемников излучения на блок управления солнечного датчика. Затем определяют наличие на изображениях одной или двух полос и обработку изображений, содержащих одну или две полосы, с получением единичных векторов нормалей к полуплоскостям, в которых расположен центр Солнца, для каждого интерференционного элемента в системе координат солнечного датчика, по которым определяют единичный вектор направления на Солнце. Технический результат – повышение точности определения направления на Солнце до единиц угловых секунд или десятых долей угловой секунды. 3 н. и 10 з.п. ф-лы, 15 ил.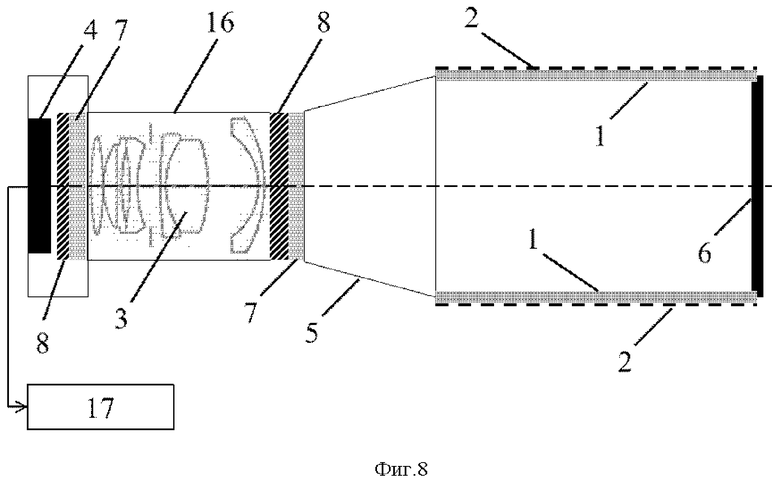
1. Интерференционный элемент, включающий
- цилиндрическую основу, внешняя боковая поверхность которой снабжена многослойным интерференционным покрытием, представляющим собой светофильтр, пропускающий излучение в полосе с центральной длиной волны λ0 при его падении по нормали к цилиндру и в полосе с центральной длиной волны  при произвольных углах падения
при произвольных углах падения  , а внутренняя боковая поверхность матирована или снабжена покрытием, рассеивающим свет;
, а внутренняя боковая поверхность матирована или снабжена покрытием, рассеивающим свет;
- систему регистрации изображения, формируемого на внутренней поверхности основы, содержащую по меньшей мере одну камеру, включающую объектив и матричный приемник излучения, при этом камера соединена с основой интерференционного элемента посредством непрозрачного переходника и установлена с возможностью формирования на матричном приемнике излучения изображения внутренней поверхности основы;
- отсекающий светофильтр, выполненный с возможностью пропуска излучения в полосе с центральной длиной волны λ1<λ0, установленный между объективом камеры и основой или внутри камеры между объективом и матричным приемником излучения.
2. Интерференционный элемент по п.1, отличающийся тем, что основа интерференционного элемента выполнена в виде полой прозрачной цилиндрической трубки.
3. Интерференционный элемент по п.1, отличающийся тем, что основа интерференционного элемента выполнена в виде двух противоположно ориентированных прозрачных полуцилиндров.
4. Интерференционный элемент по п.2, отличающийся тем, что камера системы регистрации изображения установлена с одного торца трубки вдоль ее продольной оси, а другой торец трубки закрыт непрозрачной пробкой или крышкой.
5. Интерференционный элемент по п.4, отличающийся тем, что оптическая ось объектива совпадает с продольной осью цилиндрической трубки.
6. Интерференционный элемент по п.3, отличающийся тем, что камера системы регистрации изображения установлена в каждом полуцилиндре и ориентирована в поперечном направлении по отношению к оптической оси основы интерференционного элемента.
7. Интерференционный элемент по п.1, отличающийся тем, что он снабжен ослабляющим светофильтром, выполненным с возможностью поглощения части излучения Солнца, установленным между объективом камеры и основой или внутри камеры между объективом и матричным приемником излучения.
8. Солнечный датчик, включающий корпус, внутри которого закреплены по меньшей мере два интерференционных элемента с продольным или поперечным расположением системы регистрации изображения, выполненные по п.1, и блок управления, соединенный со всеми интерференционными элементами и выполненный с возможностью обработки данных, получаемых от интерференционных элементов.
9. Солнечный датчик по п.8, отличающийся тем, что при использовании двух интерференционных элементов угол  между их осями удовлетворяет следующему соотношению
между их осями удовлетворяет следующему соотношению  , где
, где  , а угол
, а угол  соответствует углу падения излучения, при котором интерференционное покрытие интерференционного элемента пропускает излучение с длиной волны, равной центральной длине волны пропускания отсекающего светофильтра
соответствует углу падения излучения, при котором интерференционное покрытие интерференционного элемента пропускает излучение с длиной волны, равной центральной длине волны пропускания отсекающего светофильтра  .
.
10. Солнечный датчик по п.8, отличающийся тем, что при использовании трех интерференционных элементов углы между их осями удовлетворяют следующим соотношениям  где
где  – угол между осями первого и второго интерференционных элементов,
– угол между осями первого и второго интерференционных элементов,  – угол между осями первого и третьего интерференционных элементов,
– угол между осями первого и третьего интерференционных элементов,  – угол между осями второго и третьего интерференционных элементов, , а угол соответствует углу падения, при котором интерференционное покрытие интерференционного элемента пропускает излучение с длиной волны, равной центральной длине волны пропускания отсекающего светофильтра .
– угол между осями второго и третьего интерференционных элементов, , а угол соответствует углу падения, при котором интерференционное покрытие интерференционного элемента пропускает излучение с длиной волны, равной центральной длине волны пропускания отсекающего светофильтра .
11. Способ измерения угловых координат Солнца, включающий
- размещение солнечного датчика, выполненного по п.8, включающего по меньшей мере два интерференционных элемента, выполненных по п.1, на борту космического аппарата с обеспечением освещения Солнцем внешних поверхностей интерференционных элементов,
- фиксацию объективами камер изображений внутренней поверхности основы интерференционного элемента с формированием этих изображений на соответствующих матричных приемниках излучения каждого интерференционного элемента,
- направление оцифрованных изображений с выходов матричных приемников излучения на блок управления солнечного датчика,
- определение наличия на изображениях одной или двух полос,
- обработку изображений, содержащих одну или две полосы, с получением единичных векторов нормалей к полуплоскостям, в которых расположен центр Солнца, для каждого интерференционного элемента в системе координат солнечного датчика, по которым определяют единичный вектор направления на Солнце.
12. Способ по п.11, отличающийся тем, что при наличии ярких полос только на двух обрабатываемых изображениях единичный вектор направления на Солнце
 ,
,
представляет собой линию пересечения двух полуплоскостей, при этом  - единичные векторы нормали к полуплоскостям, проходящим через ось цилиндрической трубки и через центр Солнца для двух интерференционных элементов, соответственно.
- единичные векторы нормали к полуплоскостям, проходящим через ось цилиндрической трубки и через центр Солнца для двух интерференционных элементов, соответственно.
13. Способ по п.11, отличающийся тем, что при наличии ярких полос на трех обрабатываемых изображениях единичный вектор направления на Солнце
 , где
, где  представляют собой векторы пересечения полуплоскостей, при этом
представляют собой векторы пересечения полуплоскостей, при этом  - единичные векторы нормали к полуплоскостям, проходящим через ось цилиндрической трубки и через центр Солнца для трех интерференционных элементов, соответственно.
- единичные векторы нормали к полуплоскостям, проходящим через ось цилиндрической трубки и через центр Солнца для трех интерференционных элементов, соответственно.
| ИСПЫТАТЕЛЬ МОНЕТ | 0 |
|
SU175758A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКИХ ИЛИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2620288C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ СОЛНЦА И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2013 |
|
RU2555216C2 |
| ПРИБОР ТРЕХОСНОЙ ОРИЕНТАЦИИ НА СОЛНЦЕ | 1995 |
|
RU2127421C1 |
| 0 |
|
SU154706A1 | |
| Гидропривод механизма поворота лопаток осевого вентилятора | 1984 |
|
SU1280211A1 |
| EP 3169590 B1, 28.08.2019. | |||
