Изобретение относится к области сельского хозяйства, в частности, к конструкциям машин для обработки почвы, и может быть использовано в качестве машины для междурядной и приствольной обработки почвы в плодопитомниках, молодых садах, лесопитомниках и овощных хозяйствах.
Известна машина для междурядной и приствольной обработки почвы, состоящая из рамы, содержащей навесное устройство и кронштейны, опорных колес и модулей, каждый из которых состоит из двух ротационных рабочих органов, установленных на поворотных рамках, шарнирно соединенных с рамой с возможностью поворота в вертикальной плоскости, рычагов управления, соединенных с поворотными рамками, причем рабочие органы состоят из вала, в нижней части которого установлен диск с пальцами, а в верхней части установлен шкив, предназначенный для соединения с механизмом привода, снабженным редуктором, содержащим клиноременные передачи и обеспечивающим вращение рабочих органов модуля в разные стороны. На раме установлены сиденья для операторов (патент на полезную модель №214424 РФ).
Также известен культиватор EcoMulti-row компании Univerco, состоящий из рамы, содержащей навесное устройство и кронштейны, опорных колес и модулей, каждый из которых состоит из двух ротационных рабочих органов, установленных на поворотных рамках, шарнирно соединенных с рамой с возможностью поворота в вертикальной плоскости, рычагов управления, соединенных с поворотными рамками, причем рабочие органы состоят из вала, в нижней части которого установлен диск с пальцами, а в верхней части вал соединен с выходным валом гидромотора. На раме установлены сиденья для операторов (см. сайт компании https://univerco.com, https://univerco.com/en/product/weeder-eco-multi-row/).
К недостаткам аналогов относятся: отсутствие комфортных условий труда операторов, обусловленное ручным управлением рабочих органов и повышенной запыленностью рабочих мест, которые находятся вблизи обрабатываемых рабочими органами зон, и приводящее к снижению производительности машины; повышенные требования безопасности операторов; невозможность изменения количества рабочих органов машины в соответствии с количеством рядков, которые необходимо обрабатывать одновременно; сложный механизм привода рабочих органов.
Известен способ прополки растений пропашных сельскохозяйственных культур в защитной зоне рядков при капельном орошении, включающий укладку на поле совмещенных с ферромагнитными следоуказателями капельных линий, фиксирование на ферромагнитном носителе информации о местонахождении растений вдоль оси рядка путем записи сигнала в виде короткого модулированного электромагнитного импульса момента соприкосновения каждого растения с почвой в процессе посадки и последующую прополку рядков, которую производят прополочным агрегатом в виде трактора в комплекте со смонтированными почвообрабатывающими рабочими органами типа поворотных в горизонтальной плоскости размыкающихся в пределах ширины защитной зоны рядков прополочных ножей с магниточувствительными датчиками. Датчики обеспечивают считывание сигнала, записанного при посадке (патент на изобретение №2299536 РФ).
Недостатком аналога является необходимость фиксирования на носителе информации записи сигнала, требующего дополнительного элемента конструкции.
В качестве прототипа выбрана машина для междурядной и приствольной обработки почвы, состоящая из рамы, содержащей поперечную балку, навесное устройство и кронштейны, а также опорных колес и модулей. Каждый модуль состоит из корпуса, на котором шарнирно установлены поворотные рамки с возможностью поворота в вертикальной плоскости и который присоединен к поперечной балке с возможностью перемещения вдоль этой балки с одной степенью свободы посредством винтового механизма, состоящего из винта и гайки. Винт относительно поперечной балки имеет одну степень свободы с возможностью вращения посредством приводного устройства (сервопривода, шагового двигателя), установленного на раме, а гайка установлена на корпусе. Поворотные рамки посредством тяг соединены со штоком гидроцилиндра, установленного на корпусе и гидравлически посредством трубопроводов соединенного с гидрораспределителем, также гидравлически соединенным с гидросистемой трактора и электрически посредством электропроводов соединенным с контроллером, который также электрически соединен с пультом управления, приводными устройствами. Видеосистемы электрически соединены с дисплеем. На каждой поворотной рамке установлен ротационный рабочий орган (патент на изобретение №2767791 РФ).
Недостатком прототипа является наличие системы управления, которая не позволяет оператору заниматься только слежением за работой машины и которая требует внедрения сложного алгоритма обработки видеоряда.
Техническая проблема, решение которой обеспечивается при осуществлении изобретения, заключается в: отсутствии комфортных условий труда операторов, обусловленном ручным управлением рабочих органов и повышенной запыленностью рабочих мест, которые находятся вблизи обрабатываемых рабочими органами зон, и приводящем к снижению производительности машины; повышенных требованиях безопасности операторов; невозможности изменения количества рабочих органов машины в соответствии с количеством рядков, которые необходимо обрабатывать одновременно; наличии системы управления, которая не позволяет оператору заниматься только слежением за работой машины и которая требует внедрения сложного алгоритма обработки видеоряда; необходимости фиксирования на носителе информации записи сигнала, требующего дополнительного элемента конструкции.
Решение этой технической проблемы достигается тем, что в машине для междурядной и приствольной обработки почвы, состоящей из рамы, содержащей поперечную балку, навесное устройство и кронштейны, а также опорных колес, видеосистем, электрически соединенных с дисплеем, и модулей, каждый из которых состоит из корпуса, на котором шарнирно установлены поворотные рамки с возможностью поворота в вертикальной плоскости и который присоединен к поперечной балке с возможностью перемещения вдоль этой балки с одной степенью свободы посредством винтового механизма, состоящего из винта и гайки, винт которого относительно поперечной балки имеет одну степень свободы с возможностью вращения посредством приводного устройства, установленного на раме, а гайка установлена на корпусе, причем поворотные рамки посредством тяг соединены со штоком гидроцилиндра, установленного на корпусе и гидравлически посредством трубопроводов соединенного с гидрораспределителем, также гидравлически соединенным с гидросистемой трактора и электрически посредством электропроводов соединенным с контроллером, который также электрически соединен с пультом управления и приводными устройствами, причем на каждой поворотной рамке установлен ротационный рабочий орган, согласно изобретению, контроллер соединен с магниточувствительными датчиками, установленными на корпусе симметрично относительно продольной плоскости симметрии корпуса. Обеспечение более комфортных и безопасных условий труда операторов, выполняющих роль наблюдателей процессов, повышение производительности машины достигаются за счет внедрения автоматической системы управления рабочими органами, исключающей нахождение операторов вблизи обрабатываемых рабочими органами зон; упрощение системы управления рабочими органами и исключение необходимости фиксирования на носителе информации записи сигнала, требующего дополнительного элемента конструкции, достигаются применением магниточувствительных датчиков; обеспечение возможности изменения количества рабочих органов машины достигается применением принципа модульности.
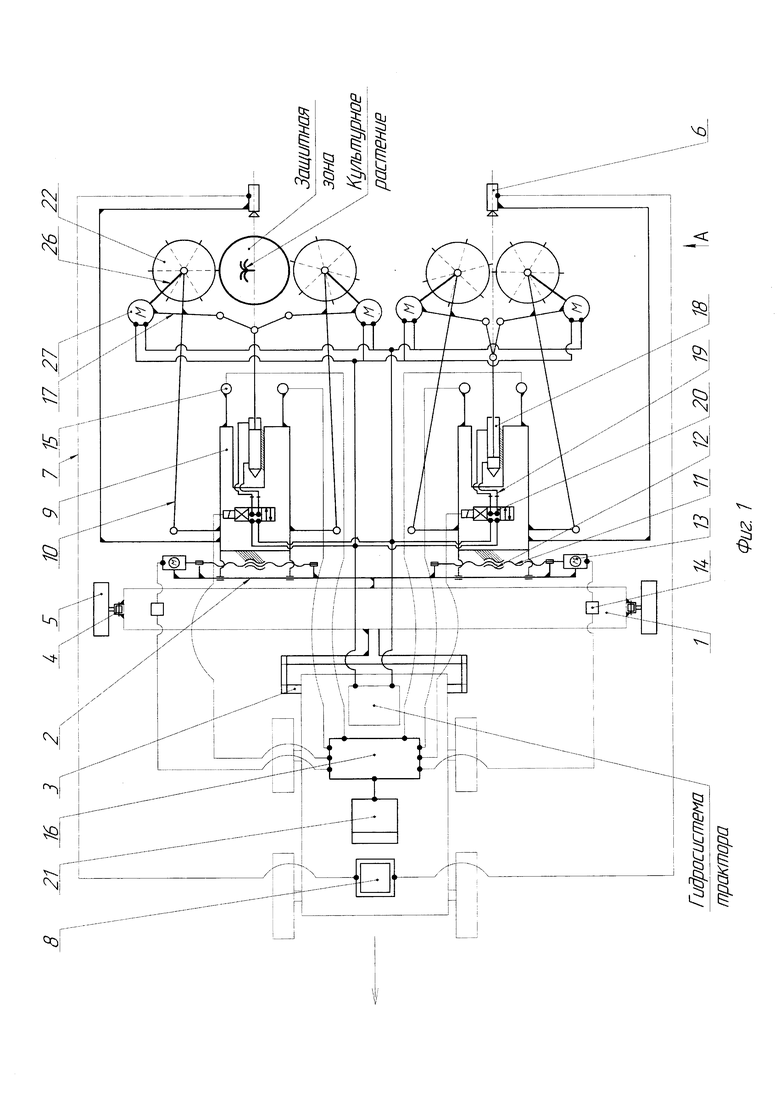
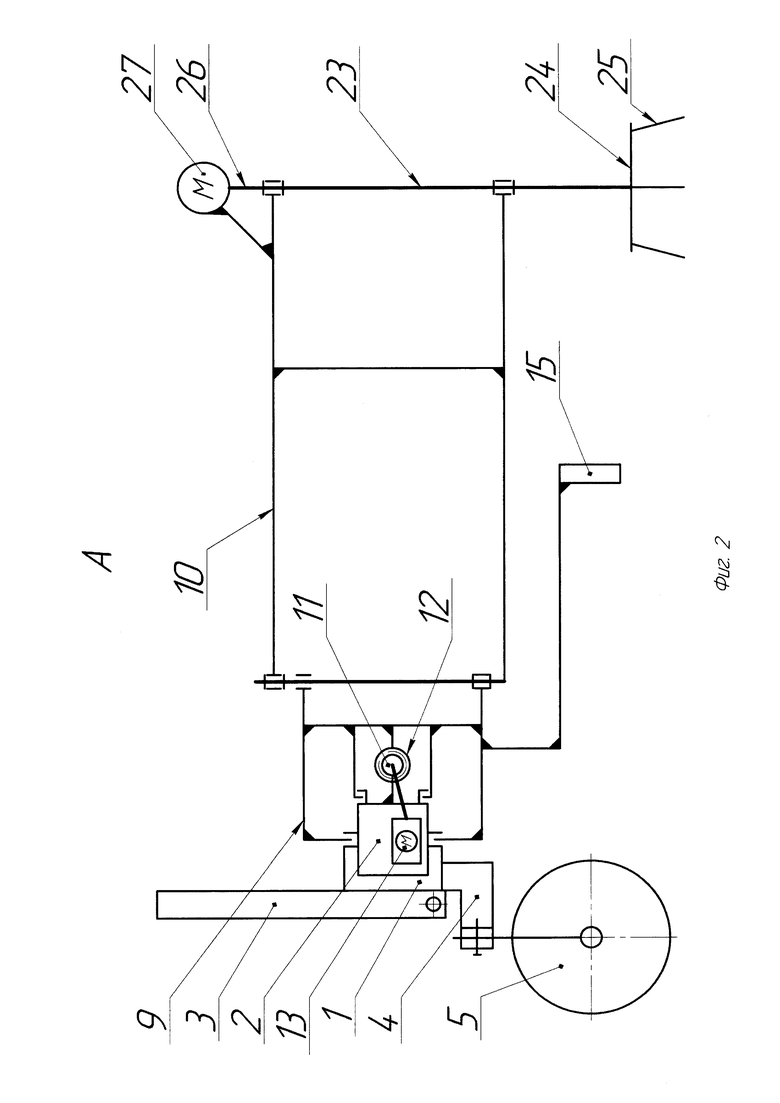
Техническая сущность предложенного технического решения поясняется чертежом, на котором: на фиг. 1 изображена схема машины, агрегатированной с трактором, вид сверху; на фиг. 2 изображен вид А фиг. 1.
Кроме этого, на чертеже дополнительно обозначено следующее:
- линией со стрелкой показано направление движения машины;
- штрихпунктирные линии характеризуют расположение рядков обрабатываемых культурных растений.
Машина для междурядной и приствольной обработки почвы состоит из рамы 1, содержащей поперечную балку 2, навесное устройство 3 и кронштейны 4, а также опорных колес 5, видеосистем 6, электрически посредством электропроводов 7 соединенных с дисплеем 8, и модулей.
Каждый модуль состоит из корпуса 9, на котором шарнирно установлены поворотные рамки 10 с возможностью поворота в вертикальной плоскости и который присоединен к поперечной балке 2. Корпус 9 имеет возможность перемещения с одной степенью свободы вдоль поперечной балки 2 посредством винтового механизма, состоящего из винта 11 и гайки 12. Винт 11 относительно поперечной балки 2 имеет одну степень свободы с возможностью вращения посредством установленного на раме приводного устройства, выполненного в виде, например, шагового двигателя 13, электрически соединенного с драйвером 14. Гайка 12 установлена на корпусе 9.
Корпус 9 содержит магниточувствительные датчики 15, установленные на корпусе 9 симметрично относительно продольной плоскости симметрии корпуса 9 и электрически соединенные с контроллером 16 (например, посредством усилителей сигнала (на фигурах не показаны)).
Поворотные рамки 10 посредством тяг 17 соединены со штоком гидроцилиндра 18, установленного на корпусе 9 и гидравлически посредством трубопроводов 19 соединенного с гидрораспределителем 20, также гидравлически соединенным с гидросистемой трактора и электрически соединенным с контроллером 16.
Драйвер 14 электрически соединен с контроллером 16, который также электрически соединен с пультом 21 управления.
На каждой поворотной рамке 10 установлен ротационный рабочий орган 22, который может быть выполнен в виде, например, вала 23, в нижней части которого установлен диск 24 с пальцами 25, а верхняя часть которого соединена с валом 26 гидромотора 27.
Предложенная машина работает следующим образом.
После перевода машины в рабочее положение начинается движение трактора, а вместе с ним и машины, вдоль обрабатываемых рядков культурных растений. Рыхление почвы и механическое удаление сорных растений осуществляется ротационными рабочими органами 22, вращение дисков 24 которых в противоположных направлениях передается от валов 26 гидромоторов 27. Во время движения модуля при перемещении рабочих органов 22 между защитными зонами соседних культурных растений рабочие органы 22 находятся в сведенном состоянии.
При приближении (отдалении) магниточувствительных датчиков 15 к ферромагнитным указателям, нанесенным на стволы (например, вместе с краской для побелки), в процессе приближения (отдаления) рабочих органов 22 к защитной зоне культурного растения происходит изменение напряженности внешнего магнитного поля. Контроллер 16 рассчитывает разницу напряженностей для каждого из датчиков 15 и на основе этого подает сигнал на драйвер 14, который передает воздействие на выходной вал шагового двигателя 13, вращение которого приводит к вращению винта 11 и, следовательно, перемещению гайки 12, а вместе с ней и корпуса 9 вдоль поперечной балки 2 в ту или иную сторону таким образом, чтобы расстояние между продольной плоскостью симметрии корпуса 9 и осью рядка находилось в допустимом диапазоне. Затем контроллер 16 рассчитывает величину напряженности, при достижении или превышении критического уровня которой происходит переключение контактов геркона магниточувствительного датчика 15, что, в свою очередь, через усилители сигнала приводит к передаче воздействия на контроллер 16, который на основе этого подает сигнал на гидрораспределитель 20, который затем передает воздействие на шток гидроцилиндра 18, что посредством тяг 17 приводит к разведению (сведению) рабочих органов 22, и, таким образом, огибанию защитной зоны культурного растения. Далее процесс повторяется до тех пор, пока рядки не будут обработаны полностью.
Видеоряды с видеосистем 6 также передаются на дисплей 8, по которому оператор способен отслеживать работу машины. При необходимости оператор вмешивается в управление положением рабочих органов 22 посредством пульта 21 управления.
Регулирование глубины обработки достигается изменением положения опорных колес 5 относительно кронштейнов 4 по вертикали.
Таким образом, использование предлагаемой машины для междурядной и приствольной обработки почвы приводит к: обеспечению более комфортных и безопасных условий труда операторов, выполняющих роль наблюдателей процессов; повышению производительности машины; упрощению системы управления рабочими органами; исключению необходимости фиксирования на носителе информации записи сигнала; обеспечению возможности изменения количества рабочих органов машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для междурядной и приствольной обработки почвы | 2022 |
|
RU2806588C1 |
| Машина для обработки почвы | 2024 |
|
RU2821886C1 |
| Машина для междурядной и приствольной обработки почвы | 2021 |
|
RU2767791C1 |
| ОРУДИЕ ДЛЯ ОБРАБОТКИ ПОЧВЫ В МНОГОЛЕТНИХ НАСАЖДЕНИЯХ | 1995 |
|
RU2115281C1 |
| СПОСОБ ВОЗДЕЛЫВАНИЯ БАХЧЕВЫХ КУЛЬТУР И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2227965C1 |
| СПОСОБ ВОЗДЕЛЫВАНИЯ КУКУРУЗЫ НА ЗЕРНО, СПОСОБ ЕЕ УБОРКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2141184C1 |
| Универсальная ротационная машина | 1957 |
|
SU120693A1 |
| Культиватор | 1988 |
|
SU1565365A1 |
| Устройство бокового смещения рамы пропашного культиватора | 2023 |
|
RU2804100C1 |
| СПОСОБ ВОЗДЕЛЫВАНИЯ БАХЧЕВЫХ КУЛЬТУР И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2121254C1 |
Изобретение относится к сельскому хозяйству. Машина для междурядной и приствольной обработки почвы состоит из рамы (1), опорных колес (5) видеосистем, электрически соединенных с дисплеем, и модулей. Рама (1) содержит поперечную балку (2), навесное устройство (3) и кронштейны (4). Каждый из модулей состоит из корпуса (9), на котором шарнирно и с возможностью поворота в вертикальной плоскости установлены поворотные рамки (10), на каждой из которых установлен ротационный рабочий орган. На корпусе (9) симметрично относительно продольной плоскости симметрии корпуса (9) установлены магниточувствительные датчики (15). Корпус (9) присоединен к поперечной балке (2) с возможностью перемещения вдоль этой балки (2) с одной степенью свободы посредством винтового механизма, состоящего из винта (11) и гайки (12). Винт (11) винтового механизма относительно поперечной балки (2) имеет одну степень свободы с возможностью вращения посредством приводного устройства (13), установленного на раме (1), а гайка (12) установлена на корпусе (9). Поворотные рамки (10) посредством тяг соединены со штоком гидроцилиндра, установленного на корпусе (9) и гидравлически посредством трубопроводов соединенного с гидрораспределителем, также гидравлически соединенным с гидросистемой трактора и электрически посредством электропроводов соединенным с контроллером, который также электрически соединен с пультом управления, приводными устройствами (13) и магниточувствительными датчиками (15). Обеспечиваются комфортные и безопасные условия труда операторов, выполняющих роль наблюдателей процессов, повышение производительности машины, упрощение системы управления рабочими органами. 2 ил.
Машина для междурядной и приствольной обработки почвы, состоящая из рамы, содержащей поперечную балку, навесное устройство и кронштейны, а также опорных колес, видеосистем, электрически соединенных с дисплеем, и модулей, каждый из которых состоит из корпуса, на котором шарнирно установлены поворотные рамки с возможностью поворота в вертикальной плоскости и который присоединен к поперечной балке с возможностью перемещения вдоль этой балки с одной степенью свободы посредством винтового механизма, состоящего из винта и гайки, винт которого относительно поперечной балки имеет одну степень свободы с возможностью вращения посредством приводного устройства, установленного на раме, а гайка установлена на корпусе, причем поворотные рамки посредством тяг соединены со штоком гидроцилиндра, установленного на корпусе и гидравлически посредством трубопроводов соединенного с гидрораспределителем, также гидравлически соединенным с гидросистемой трактора и электрически посредством электропроводов соединенным с контроллером, который также электрически соединен с пультом управления и приводными устройствами, причем на каждой поворотной рамке установлен ротационный рабочий орган, отличающаяся тем, что контроллер соединен с магниточувствительными датчиками, установленными на корпусе симметрично относительно продольной плоскости симметрии корпуса.
| Машина для междурядной и приствольной обработки почвы | 2021 |
|
RU2767791C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА В МЕЖДУРЯДЬЯХ ПРОПАШНЫХ КУЛЬТУР ПРИ КАПЕЛЬНОМ ОРОШЕНИИ | 2003 |
|
RU2273978C2 |
| Устройство бокового смещения рамы пропашного культиватора | 2023 |
|
RU2804100C1 |
| DE 4004247 A1, 14.08.1991. | |||

