Область техники
Изобретение относится к сельскохозяйственному машиностроению, в частности к машинам с рабочими органами, управление положением которых осуществляется в автоматическом следящем режиме, а конкретно к пропашным культиваторам для междурядной обработки с системой точного наведения. Служит для механической обработки междурядий культурных сельскохозяйственных растений, внесения удобрений, химикатов, в корневую зону или на поверхностную плоскость.
Уровень техники.
При движении машинно-тракторного агрегата по линии обработки культур, в связи с неравномерной плотностью почвы, выходом трактора из междурядий, сносе на склонах, орудие стремится сойти с линии обработки, что в дальнейшем приведет к повреждению посадок. С целью избежать отклонения орудия от задаваемой линии движения, создаются механизмы корректировки движения орудия.
Известны механизмы корректировки направления движения «подруливанием» опорными колесами орудия, например механизм компании Grimme https://products.grimme.com/ru/p/gb-330 (Опубликовано 03.11.2022 ) на прицепной картофельной сажалке. Механизм представляет собой ось с поворотными кулаками, шарнирно соединенные между собой поперечной тягой. Поворот колес происходит за счет срабатывания гидроцилиндра.
Недостатком этого механизма является пересечение опорных колес со смежным обработанным проходом, что вызывает переуплотнение почвы, уменьшение защитной зоны, а в дальнейшем и снижение урожайности.
Еще одним устройством регулировки прямолинейного движения орудия, является механизм поворотного дышла, способный направить орудие на линию посадки.
Известно устройство для присоединения прицепа к трактору (патент FR2641234. Заявитель: CARUELLE [FR]. Опубликовано 1994-06-03) [1]. Состоит из рамы с подвижной шарнирно установленной кареткой 2 с возможностью поперечного скольжения по брусу рамы. Для смещения каретки относительно рамы, устанавливается гидроцилиндр 3 двухстороннего действия. корпус гидроцилиндра соединен с кареткой, а шток с двух сторон соединен с рамой. Механизм используется с навесными орудиями и позволяет смещать ось сельскохозяйственного орудия путем его углового отклонения от линии движения.
Существуют устройства, вмонтированные в раму орудия на которую навешивают секции орудий в различных исполнениях. К достоинствам можно отнести возможность бокового выноса секций, что скорректирует навешенное орудие на линию обработки посадок. Одним из подобных устройств является плавающее навесное устройство фирмы Carre (см.http://www.carre.fr/entretien-des-cultures-et-prairies/bineuse/65-econet-sgi.html. Опубликовано 2020 г.), которое имеет раму с трех точечным креплением, присоединяющуюся к навесному механизму трактора, соединяющуюся с подвижным брусом посредством верхней направляющей и нижней направляющей. Для ограничения глубины обработки на раме устанавливаются стойки с опорными металлическими колесами, которые также не позволяют орудию сместиться с линии посадок. Смещение подвижного бруса относительно рамы осуществляется гидроцилиндром , соединяющим их. Подвижный брус относительно рамы совершает поперечное движение в горизонтальной плоскости по направлению движения трактора, в результате чего происходит смещение навесных секций. Используют на пропашных культурах. К основным недостаткам этого механизма можно отнести интеграцию механизма регулирования положения орудием непосредственно в раму орудия, что приводит к сужению круга используемых секций.
Для смещения прицепного сельскохозяйственного орудия с линии обработки применяют механизм смещения. Механизм бокового смещения представляет собой дополнительное устройство или часть орудия, позволяющее сместить орудие относительно оси трактора в горизонтальной плоскости
Известна система подключения машины к передвижной технике по патенту Канады CA3018862 (System for connecting implement to mobile machinery.МПК A01B59/002; опубл. 27.03.2020) [2]. Устройство для присоединения орудия к трехточечной сцепке мобильной техники состоит из внутренней и внешней прямоугольных рамок, шарнирно соединенных между собой квадратными направляющими с вершинами в вертикальной и горизонтальной осях с возможностью смещения рамок друг относительно друга. Смещение обеспечивается гидроцилиндром, шарнирно соединяющим рамки устройства. Особенностью устройства является наличие на гранях направляющих выступов, позволяющих исключить возможные осевые отклонения.
Известна система для соединения орудий с трехточечной навеской мобильных машин для управляемого бокового смещения соединенных орудий ( US2020037489, МПК A01B59/002 , заявитель MOLLICK PETER J [US] Опубликовано 2020-02-06) [3 ]. Система предназначена для соединения нескольких навесных орудий с трехточечной навеской мобильной техники для контролируемого бокового перемещения подсоединенных навесных орудий. Система содержит первое, второе и третье устройства, причем каждое устройство содержит первую раму, вторую скользящую раму, скользящую в поперечном направлении относительно первой рамы, по меньшей мере один соединитель, поддерживаемый второй скользящей рамой, для соединения второй скользящей рамы с одним из приспособлений, и по меньшей мере один привод, соединенный с первой рамой и скользящей второй рамой, для перемещения скользящей второй рамы в поперечном направлении вперед и назад относительно первой рамы. Второе устройство прикреплено к одной стороне первого устройства, а третье устройство прикреплено к другой стороне первого устройства.
Все известные из уровня техники устройства бокового смещения являются громоздкими за счет использования рам, тяг, направляющих стержней, и обладают большой массой.
В результате проведенных исследований устройств управления положением сельскохозяйственного орудия в агрегате (см., например, диссертационную работу Семичева С.В. на тему «Управляемое навесное устройство пропашного культиватора» (vim.ru/upload/iblock/55c/Semichev_S.V. dissertaciya.pdf. Опубликовано 2022 г.) был сделан вывод о том, что наиболее рациональным является конструкция устройства: по типу выполняемых технологических операций - универсальное устройство; по типу привода - гидравлическое; по типу координатного перемещения - горизонтальное; по типу системы управления - автоматизированные; по месту расположения - заднее; по типу навески - навесное; по числу степеней свободы - две.
Технический результат
Техническим результатом заявляемого технического решения является создание устройства бокового смещения рамы пропашного культиватора для междурядной обработки с системой точного наведения, содержащее механический блок смещения рамы культиватора, состоящий из: передней каретки, жестко связанной с трактором, и задней каретки, жестко связанной с рамой культиватора, выполненных с возможностью как фиксации друг относительно друга, так и горизонтального перемещения кареток друг относительно друга на подшипниках, установленных в задней каретке, по направляющим, установленным в передней каретке, и приводимых в движение гидроприводом, управляемым электронным блоком управления.
Раскрытие изобретения
Технический результат достигается тем, что устройство бокового смещения рамы пропашного культиватора для междурядной обработки с системой точного наведения, включающей датчик скорости перемещения рамы культиватора, датчик пространственного позиционирования рамы культиватора; компьютер с сенсорным монитором, установленный в кабине трактора, оптическую камеру, фиксирующую рядки культурных растений,
содержит:
механический блок смещения рамы, состоящий из передней каретки, жестко связанной с трактором, и задней каретки, жестко связанной с рамой культиватора, выполненных с возможностью горизонтального перемещения кареток друг относительно друга на подшипниках, установленных в задней каретке, по направляющим, установленным в передней каретке, и приводимых в движение гидроприводом;
электронный блок управления смещением, установленный на механическом блоке смещения с возможностью получения сигналов от системы точного наведения: датчика скорости перемещения рамы культиватора, датчика пространственного позиционирования рамы культиватора, оптической камеры, компьютера с сенсорным монитором, установленного в кабине трактора, оптической камеры,
и управляющий гидроприводом смещения;
гидравлический привод смещения, установленный на механическом блоке смещения и состоящий из первого и второго гидроцилиндров, связанных гидравлическими линиями с управляющим гидрораспределителем с блоком электромагнитных клапанов, соединенным электрическим связями с электронным блоком управления смещением;
потенциометрический датчик положения, расположенный между первым и вторым гидроцилиндрами, и механически соединенный с передней и задней каретками с возможностью передачи сигналов в блок управления;
при этом к задней каретке жестко присоединены штоки и первого и второго гидроцилиндров, корпуса которых расположены и жестко закреплены внутри передней каретки;
при этом гидрораспределитель связан гидравлически с напорной и сливной магистралями гидросистемы трактора;
при этом первый и второй электрические входы гидрораспределителя, являющиеся входами блока электромагнитных клапанов, подключены, соответственно, к первому и второму выходам блока управления, а вход блока управления подключен к электрическому выходу потенциометрического датчика положения;
причем в состав гидрораспределителя входит блок электромагнитных клапанов, принимающий команды от блока управления, поступающие на него через первый и второй электрические входы гидрораспределителя, и задающий одно из трех состояний механического блока смещения: «Стоп», «Движение влево» или «Движение вправо».
При этом передняя каретка жестко закреплена на трехточечном навесном устройстве трактора, задняя каретка жестко закреплена на раме культиватора с помощью кронштейнов;
При этом задняя каретка содержит комбинированные подшипники, парами установленные в трех уровнях, а именно: в верхнем уровне расположена пара горизонтальных верхних комбинированных подшипников, перемещающихся по верхней направляющей передней каретки;
на среднем уровне размещена пара вертикально расположенных центральных комбинированных подшипников, перемещающихся по средней направляющей передней каретки;
на нижнем уровне расположена пара горизонтальных нижних комбинированных подшипников, перемещающихся по нижней направляющей передней каретки.
При этом внутри корпуса передней каретки выполнены две симметричные ниши для установки первого и второго гидроцилиндров, над которыми выполнены прочные профильные направляющие: верхняя и средняя, а под нишами выполнена нижняя направляющая для размещения комбинированных подшипников, установленных в задней каретке.
При этом передняя каретка выполнена с двумя нишами с внешней стороны корпуса, причем блок управления смещением установлен в первой нише с внешней стороны корпуса передней каретки и закрыт первым защитным экраном, а гидрораспределитель установлен во второй нише и закрыт вторым вторым защитным экраном.
Краткое описание чертежей
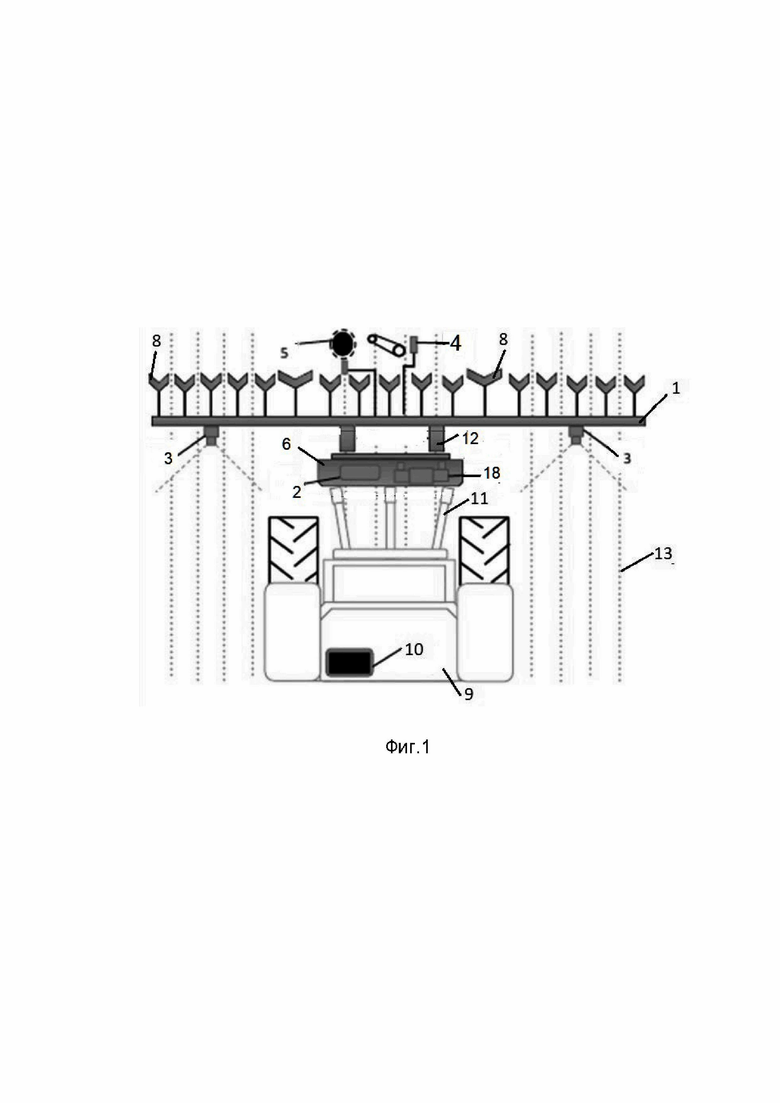
Фиг.1- схема культиватора для междурядной обработки с системой точного наведения.
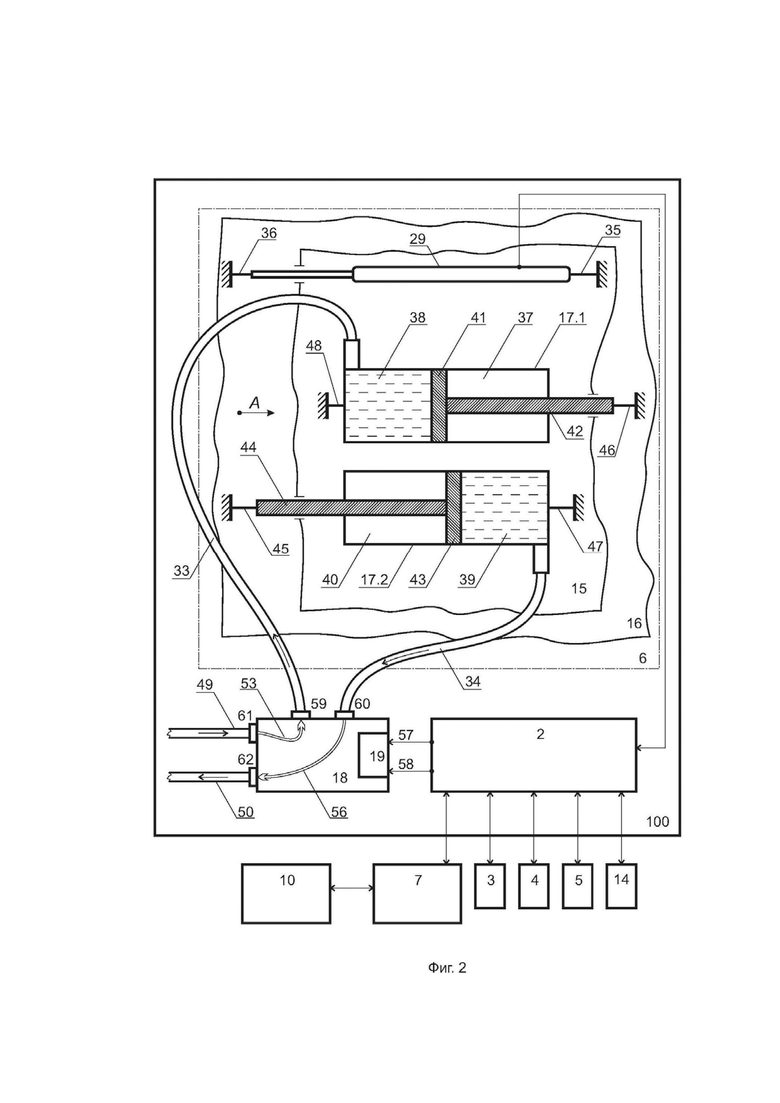
Фиг. 2, 2а - схема механизма смещения рамы культиватора.
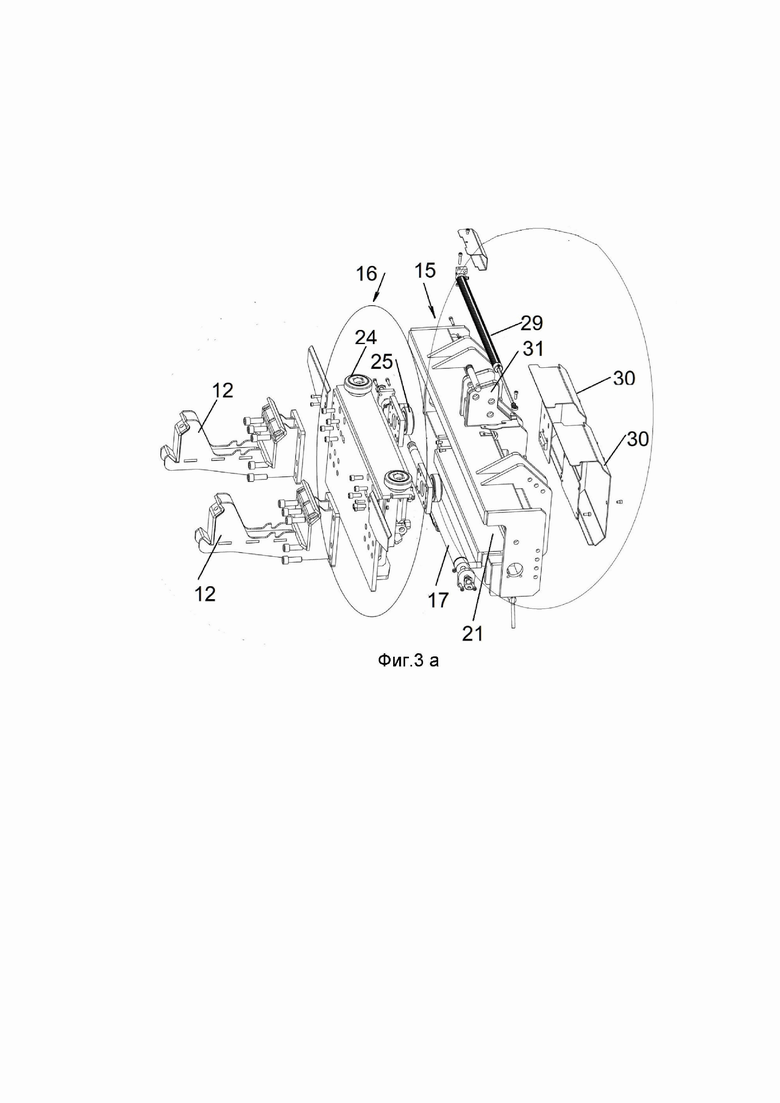
Фиг. 3а - схема блока смещения, разнесенная в пространстве, первый вид;
Фиг. 3б - схема блока смещения, разнесенная в пространстве, второй вид;
Фиг.4 - общий вид передней каретки;
Фиг.5- общий вид задней каретки;
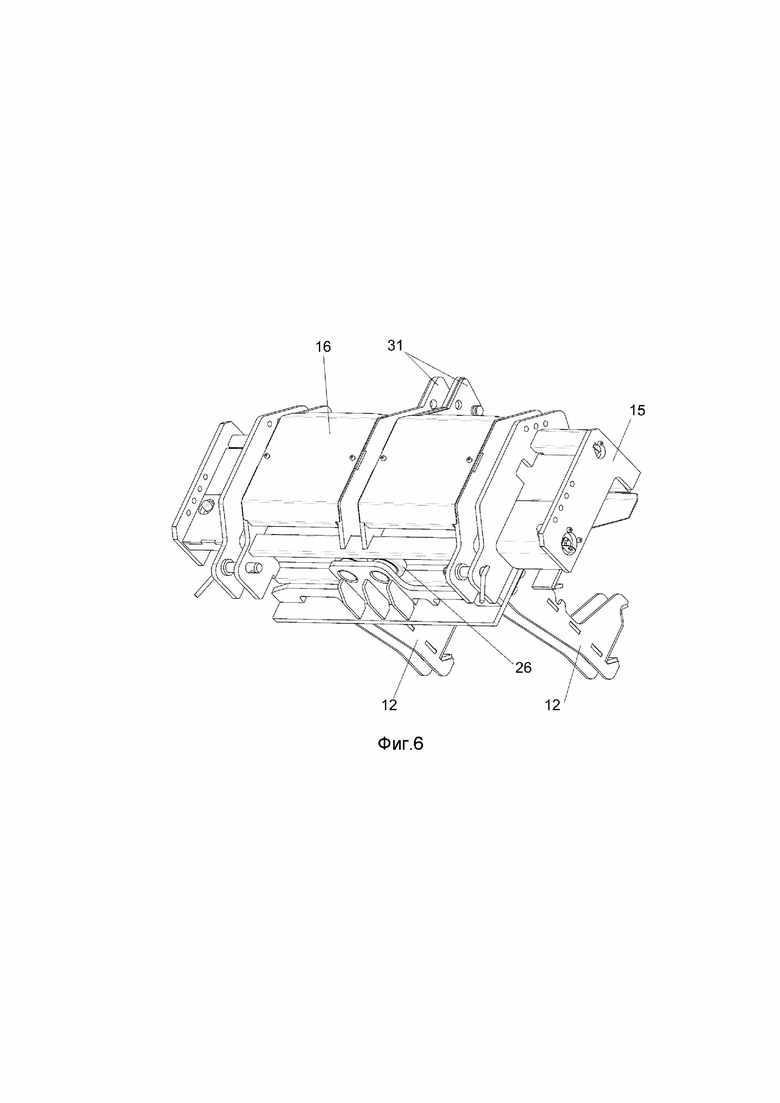
Фиг.6- общий вид блока смещения с совмещенными каретками передней и задней.
Перечень позиций
100- заявляемое устройство бокового смещения пропашного культиватора для междурядной обработки с системой точного наведения;
1- культиваторная рама;
2- блок управления смещением рамы культиватора;
3- оптическая камера;
4- датчик, измеряющий пространственное позиционирование рамы культиватора;
5-датчик, измеряющий скорость рамы культиватора;
6- блок смещения;
7- компьютер;
8- культиваторные модули;
9 - трактор;
10-монитор;
11- трехточечная навеска трактора;
12- кронштейны крепления к раме культиватора;
13- направление междурядий ;
14- датчик скорости на основе GPS;
15- передняя каретка;
16-задняя каретка;
17- гидроцилиндры привода смещения: 17.1 - первый гидроцилиндр, 17.2- второй гидроцилиндр;
18 -гидрораспределитель;
19- блок электромагнитных клапанов;
20- ниши для размещения гидроцилиндров 17.1,17,2;
21-верхняя направляющая подшипника 24;
22-средняя направляющая подшипника 25;
23 - нижняя направляющая подшипника 26:
24- верхние подшипники;
25- центральные подшипники;
26 нижние подшипники;
27 ниша для размещения блока 2 управления;
28 ниша для размещения гидрораспределителя
29- потенциометрический датчик линейного положения;
30- защитные экраны;
31 -верхние крепления передней каретки к трехточечной навеске;
32- нижние крепления передней каретки к трехточечной навеске.
33- гидролиния гидроцилиндра 17.1 передней каретки 15;
34- гидролиния гидроцилиндра 17.2 задней каретки 16.
35- жесткая связь потенциометрического датчика 29 с передней кареткой;
36- жесткая связь потенциометрического датчика 29 с задней кареткой;
37-надпоршневое пространство гидроцилиндра передней каретки;
38 - подпоршневое пространство гидроцилиндра передней каретки;
39 - надпоршневое пространство гидроцилиндра задней каретки;
40 - подпоршневое пространство гидроцилиндра задней каретки;
41 - поршень гидроцилиндра передней каретки;
42 - шток гидроцилиндра передней каретки;
43 - поршень гидроцилиндра задней каретки;
44 - шток гидроцилиндра задней каретки;
45 - крепление штока 44 гидроцилиндра задней каретки;
46 - крепление штока 42 гидроцилиндра передней каретки;
47 -крепление второго гидроцилиндра 17.2;
48 - крепление первого гидроцилиндра 17.1;
49- трубопровод высокого давления;
50 - трубопровод низкого давления;
51 - гидравлический вход гидрораспределителя 18;
52 - гидравлический выход гидрораспределителя 18.
53, 54 - каналы высокого давления жидкости;
55,56 - каналы низкого давления жидкости;
57 - первый электрический вход гидрораспределителя 18;
58 - второй электрический вход гидрораспределителя 18;
59 - первый гидравлический вход /выход гидрораспределителя 18;
60 - второй гидравлический вход /выход гидрораспределителя 18;
Осуществление изобретения.
На фиг.1 изображена общая схема пропашного культиватора для междурядной обработки с системой точного наведения. Такой культиватор содержит:
культиваторную раму 1, на которой установлены культиваторные модули 8, снабженные различными насадками для выполнения определенных сельскохозяйственных работ; по крайней мере одна или более оптические камеры 3 высокого разрешения для сбора оптической информации, установленные на раме 1 культиватора;
датчики: датчик 4, измеряющий скорость перемещения рамы 1, в качестве альтернативы может быть использован датчик 14 скорости на основе GPS, и датчик 5, измеряющий пространственное позиционирование рамы культиватора;
блок смещения 6, соединенный с рамой 1 кронштейнами 12, а с трактором 9 с помощью трехточечной навески 11, блок 2 управления смещением;
сенсорный монитор 10, установленный в кабине трактора 9, со встроенным компьютером 7 для анализа изображений камеры и вычисления точных центров рядов культурных растений.
Заявляемое устройство 100 бокового смещения пропашного культиватора для междурядной обработки с системой точного наведения (фиг.1,2) содержит :
механический блок смещения 6 рамы 1, состоящий из: передней 15 каретки, жестко связанной с трактором, и задней 16 каретки, жестко связанной с рамой 1 культиватора, выполненных с возможностью горизонтального смещения друг относительно друга и приводимых в движение гидроприводом ;
электронный блок 2 управления смещением, установленный на механическом блоке 6 смещения, с возможностью получения сигналов от системы точного наведения: датчика скорости перемещения рамы культиватора, датчика 5 пространственного позиционирования рамы культиватора; компьютера 7 с сенсорным монитором 10, установленного в кабине трактора,
и управляющий гидроприводом смещения;
гидравлический привод смещения, установленный на механическом блоке 6 смещения и состоящий из первого 17.1 и второго 17.2 гидроцилиндров, соединенных с управляющим гидрораспределителем 18, соединенным в свою очередь с блоком 2 управления смещением; причем первый 17.1 и второй 17.2 гидроцилиндры развернуты друг по отношению к другу на 180 градусов, а их оси расположены соосно с направлением (вектором) перемещения задней каретки 16 относительно передней 15;
потенциометрический датчик 29 положения, механически соединенный с передней 15 и задней 16 каретками, а электрически, своим выходом подключенный ко входу блока 2 управления.
Таким образом, все органы управления боковым смещением рамы 1 культиватора заявляемого устройства расположены на механическом блоке 6 смещения.
Ниже следует более подробное описание основных узлов заявляемого устройства.
Для лучшего понимания структуры и работы заявляемого устройства передняя 15 и задняя 16 каретки, первый 17.1 и второй 17.2 гидравлические цилиндры и гидрораспределитель 18 на схемах фиг. 2 и фиг. 2а показаны условно, без соблюдения масштаба и без детализации.
Блок управления 2 управляет гидравлическим приводом блока 6 смещения рамы 1 культиватора и культиваторных модулей 8 в междурядье 13. Далее по тексту гидравлический привод (гидропривод) понимается как совокупность деталей и устройств, предназначенных для приведения в движение механизмов посредством гидравлической энергии.
Блок 2 управления представляет собой электронный блок, содержащий микроконтроллер с записанной в его памяти программой, и электронные компоненты, обеспечивающие его функционирование. Блок 2 управления заключен в водонепроницаемый металлический корпус. Защитный экран 30.1, закрепленный на передней каретке 15, обеспечивает блоку 2 управления дополнительную защиту от механических повреждений и прямого попадания дождя.
К входам/выходам блока 2 управления подключены устройства системы точного наведения: компьютер 7 с сенсорным монитором 10, установленные в кабине трактора; по крайней мере, одна оптическая камера 3 высокого разрешения для сбора оптической информации; датчик 5, измеряющий скорость перемещения рамы 1, и датчик 4, измеряющий пространственное позиционирование рамы культиватора; датчик GPS 14, с помощью которых блок управления 2 собирает информацию, об окружающей его обстановке, передает ее в компьютер 7, который на основе принятой информации делает вывод какую команду в данный момент должен выполнять механический блок 6 смещения для того чтобы был достигнут заявляемый технический результат. Принятое решение компьютер 7 в виде команд направляет в блок 2 управления, который преобразует эти команды в сигналы управления гидрораспределителем 18, который управляет гидроприводом блока 6 смещения, перемещающего раму 1, обеспечивая при этом прохождение культиваторного модуля строго в междурядье, вне зависимости от курса трактора, сносе на склонах, таким образом чтобы предотвратить повреждения рядков культурных растений культиваторным модулем.
При этом выходы блока 2 управления подключены к входам 57 и 58 гидрораспределителя 18, являющиеся входами блока 19 электромагнитных клапанов, а вход блока 2 управления соединен с датчиком 29 линейного положения.
Необходимое смещение рамы 1 культиватора производится благодаря перемещению закрепленной на ней задней 16 каретки относительно закрепленной на тракторе передней 15 каретки, входящих в состав блока 6 смещения по командам из блока 2 управления.
Механический блок 6 смещения (фиг.2) состоит из двух кареток передней 15 и задней 16, приводимых в движение первым 17.1 и вторым 17.2 гидроцилиндрами, поршни 41 и 43 которых перемещаются относительно их корпусов за счет разности давлений жидкости в подключенных к ним гидролиниях 33 и 34, соответственно. Диапазон смещения кареток 15 и 16 друг относительно друга составляет 0,5-500 мм. Первый 17.1 и второй 17.2 гидроцилиндры развернуты друг по отношению к другу на 180 градусов, а их оси расположены соосно с направлением перемещения задней каретки 16 относительно передней 15.
Каретки (фиг. 4, 5) блока 6 смещения выполнены из конструкционной низколегированной стали, предпочтительно марки 17Г1С, которая характеризуется высокими показателями твердости и прочности, сталь хорошо сопротивляется внешним воздействиям, не ограничена по свариваемости, не требует предварительной обработки, не склоннна к растрескиванию. Одно из главных достоинств стали марки 17Г1С является отличная сопротивляемость нагрузкам, что немаловажно, т.к. элементы блока смещения подвержены динамическим нагрузкам (см. https://areal-metal.ru/spravka/17g1s?ysclid=lfkt360s8f397707728).
Передняя каретка 15 жестко закреплена на трехточечном навесном устройстве 11 трактора (фиг.1) верхним 31 и нижним 32 креплениями (фиг.4). Внутри корпуса передней каретки 15 выполнены две симметричные ниши 20 для установки первого 17.1 и второго 17.2 гидроцилиндров, над которыми выполнены прочные профильные направляющие: верхняя 21 и средняя 22, а под нишами выполнена нижняя 23 направляющая для комбинированных подшипников, установленных в задней каретке 16 (фиг.5).
Профильные направляющие 21,22,23 выдерживают высокие статические и динамические нагрузки.
На внешней стороне корпуса передней каретки выполнены первая 27 и вторая 28 ниши. В первой нише 27 установлен блок управления 2, закрытый первым защитным экраном 30.1 (фиг.3а, 3б, 6).
Во второй нише 27 с внешней стороны корпуса передней каретки 15 установлен гидрораспределитель 18, закрытый вторым защитным экраном 30.2.
Задняя каретка 16 жестко закреплена на раме 1 культиватора с помощью кронштейнов 12 (фиг. 1). К задней каретке 16 жестко присоединены с помощью креплений 45 и 46 штоки 42 и 44 первого и второго гидроцилиндров 17.1 и 17.2, корпуса которых жестко закреплены с помощью креплений 47 и 48 в передней каретке 15, жестко закрепленной на трехточечной навеске трактора (фиг.1,2).
Задняя каретка 16 содержит верхние подшипники 24 , центральные подшипники 25 и нижние 26 подшипники для осуществления перемещения кареток (фиг.5). В качестве подшипников используются комбинированные подшипники, например, подшипники компании CRS, Италия (https://www.crsrl.com. Catalogo geverato, 2018г.), представляющие собой роликовый подшипник, воспринимающий радиальные нагрузки, в который встроен осевой подшипник, воспринимающий осевые нагрузки, что обеспечивает свободное перемещение всего узла внутри направляющих. Указанные подшипники обладают крайне высокoй жесткостью, грузоподъемностью, отсутствием зазора и точностью вращения, способны воспринимать радиальные и двусторонние осевые нагрузки, а также опрокидывающие моменты.
Данные подшипники обеспечивают прямолинейность перемещения кареток в заданном направлении, их плавное и точное перемещение.
Подшипники установлены с возможностью их работы в двух плоскостях: вертикальной и горизонтальной, для уменьшения нагрузки на каретки. Подшипники парами расположены в корпусе задней каретки в трех уровнях:в верхнем уровне расположена пара горизонтальных подшипников 24, перемещающихся по верхней направляющей 21 передней каретки, например, воспринимающих нагрузку горизонтальную 6т х 2 , вертикальную 3т х2;
на среднем уровне размещена пара вертикально расположенных подшипников 25, перемещающихся по средней направляющей 22 передней каретки, например, воспринимающих нагрузку горизонтальную 3т х 2, вертикальную 6т х2;
на нижнем уровне расположена пара горизонтальных подшипников 26, перемещающихся по нижней направляющей 23 передней каретки, например, воспринимающих нагрузку горизонтальную 6т х 2 , вертикальную 3т х2.
Такое расположение подшипников делает механический блок смещения компактным.
Благодаря применению в конструкции блока смещения комбинированных подшипников, установленных в горизонтальной и вертикальной плоскостях, в прочных профильных направляющих, происходит оптимальное распределение нагрузок, снижаются динамические нагрузки на каретки, при этом блок смещения выполнен компактным, без рычагов, штанг и рамок, что позволяет изготавливать блок смещения с уменьшенной массой: 300-700 кг, которая значительно меньше по сравнению с массой, по крайней мере, около 1250 кг и выше, чем у существующих аналогов, известных из уровня техники (см., например Автоматическое направляющее устройство CULTITAM https://www.bednar.com/ru/row-master-rn_s/. Опубликовано 14.08.2019; Механизм управления смещением фирмы Steketee, Германия https://www.steketee.com/producten/ic-light-2/. Опубликовано 03.06.2018 ; Культиватор междурядной обработки  ECONET SGI, Франция, https://agroserver.ru/b/kultivator-mezhduryadnoy-obrabotki-carr-econet-1460832.htm Опубликовано 23.12.2021, и пр.).
ECONET SGI, Франция, https://agroserver.ru/b/kultivator-mezhduryadnoy-obrabotki-carr-econet-1460832.htm Опубликовано 23.12.2021, и пр.).
К задней каретке 16 жестко присоединены с помощью крепления 45 шток 44 второго гидроцилиндра 17.2 и с помощью крепления 46 первого гидроцилиндра 17.2, корпуса которых, в свою очередь, жестко закреплены с помощью креплений 47 и 48 в передней каретке 15 (Фиг. 2).
Средством мониторинга величины смещение рамы является потенциометрический 29 датчик линейного положения, который установлен в передней каретке между первым 17.1 и вторым 17.2 гидроцилиндрами, преобразуя данные о перемещении кареток в выходной сигнал (https://studfile.net/preview/9804907/page:15/ Опубликовано 22.22.2020).
Потенциометрический 29 датчик линейного положения имеет ход 300мм или 500мм, в зависимости от комплектации, и максимальное сопротивление 5KΩ.
К корпусам первого 17.1 и второго 17.2 гидроцилиндров со стороны креплений 48 и 47 подключены вторые концы гидролиний 33 и 34, соответственно. Первый конец гидролинии 33 подключен к первому 59 гидравлическому входу/выходу гидрораспределителя 18, а первый конец гидролинии 34 подключен к второму 60 гидравлическому входу/выходу гидрораспределителя 18.
При этом гидравлический вход 51 гидрораспределителя 18 подключен с помощью трубопровода 49 к подсистеме высокого давления гидросистемы трактора (на схеме не показана), а гидравлический выход 52 гидрораспределителя 18 подключен с помощью трубопровода 50 к подсистеме низкого давления гидросистемы трактора (на схеме не показана). Первый и второй электрические входы 57 и 58 гидрораспределителя 18 подключены, соответственно, к первому и второму выходам блока 2 управления.
Таким образом, на эти входы поступают от блока 2 управления команды управления гидрораспределителем 18 - на вход 57 команда «Движение влево», а на вход 58 команда «Движение вправо».
Вход блока 2 управления подключен к электрическому выходу датчика 29 положения, который жестко закреплен с помощью крепления 36 к задней каретке 16, и с помощью крепления 35 к передней каретке 15, что позволяет блоку 2 управления отслеживать перемещение передней каретки 15 относительно задней каретки 16, а т.к. задняя каретка 16 жестко закреплена на раме 1 культиватора, а передняя каретка 15 жестко закреплена на трехточечной навеске, блок 2 управления, таким образом, отслеживает горизонтальное смещение рамы культиватора относительно оси трактора.
В состав гидрораспределителя 18 входит блок 19 электромагнитных клапанов, позволяющий по командам, поступающим на первый 57 и второй 58 электрические входы гидрораспределителя 18, формировать внутри него каналы 53 и 54 высокого давления и каналы 55 и 56 жидкости низкого давления (Фиг. 2 и 2а). Указанные команды, поступающие на первый 57 и второй 58 электрические входы гидрораспределителя 18, представляют собой активные уровни электрических сигналов - напряжение, поступающее на электромагнитный клапан, приводящее к его срабатыванию. Наличие активного уровня на первом входе 57 является командой «Движение вправо», по которой происходит перемещение задней каретки 16 относительно передней каретки 15. Наличие активного уровня на втором входе 58 является командой «Движение влево», по которой происходит перемещение задней каретки 16 относительно передней каретки 15. Отсутствие активного уровня на входе 57 и на входе 58 одновременно является командой «Стоп» и движение не выполняется. Одновременное наличие активного уровня на входах 57 и 58 запрещено и возникнуть не может.
Работа.
В культиваторе для междурядной обработки с системой точного наведения управление положением рабочих органов осуществляется в автоматическом следящем режиме, благодаря этому рабочие органы такого культиватора точно идут по междурядью, что позволяет избежать "подрезание" рядка на уклонах, также позволяет выполнять культивацию очень близко от рядов и увеличить скорость обработки.
В базе данных компьютера 7 системы точного наведения имеются библиотеки с 3D моделями культурных растений (соя, кукуруза, подсолнечник, свекла и т.д.)
Программа компьютера 7 автоматически распознает тип растений и их размеры, определяет интервал габаритов культурного растения, учитывая при этом, что культурные посевы расположены строго в линии, а не хаотично по площади. Для этого система использует цветную камеру 3 для выделения, например, зеленого цвета культуры и сорняков из фона почвы, камней и перегноя. Ряды урожая, захваченные камерой, отображаются на мониторе 10 и сопоставляются с шаблоном, соответствующим заданному междурядью посадки. Изображение передается с камеры 3 и отображается в реальном времени на мониторе 10 с наложенным шаблоном междурядья в виде зеленых линий.
Постоянная трансляция изображения в реальном времени позволяет пользователю постоянно контролировать совпадение шаблонов междурядья со строками культур, что важно для точного наведения культиватора.
Система определяет строки/ряды культурных растений, определяет ось в междурядье и по ней наводит необходимое смещение в блоке 6 смещения культиватора для прохождения культиваторного модуля строго в междурядье.
Это смещение осуществляется блоком смещения 6 по командам блока 2 управления.
При выполнении блоком 6 смещения команды «Движение вправо» (по стрелке А) (фиг.2) расстояние между креплениями 35 и 36 датчика 29 положения сокращается. При выполнении блоком 6 смещения команды «Движение влево» (по стрелке Б) (фиг.2а) расстояние между креплениями 35 и 36 датчика 29 положения увеличивается. При выполнении команды «Стоп» (на схеме не показано) расстояние между креплениями 35 и 36 датчика 29 положения неизменно.
При поступлении команды «Движение вправо» (активный уровень на первом входе 57) блок 19 электромагнитных клапанов в гидрораспределителе 18 формирует его внутреннюю гидравлическую схему таким образом, что (Фиг. 2):
1. Формируется канал 53 высокого давления, выход которого подключен к первому гидравлическому входу/выходу 59 гидрораспределителя 18. Причем в канал 53 поступает жидкость из подключенного к гидравлическому входу 51 трубопровода 49 высокого давления, подключенного к гидросистеме трактора (на схеме не показана).
2. Формируется канал 56 низкого давления выход которого подключен к гидравлическому выходу 52 гидрораспределителя 18, а вход подключен ко второму входу/выходу 60 гидрораспределителя 18.
3. С первого гидравлического входа/выхода 59 гидрораспределителя 18 жидкость под высоким давлением поступает в гидролинию 33.
4. Из гидролинии 33 жидкость поступает в полость 38 первого гидроцилиндра 17.1, что приводит к повышению давления в полости 38, благодаря чему на первый гидроцилиндр 17.1 начинает действовать сила, и поршень 41 со штоком 42 начинают перемещаться вправо вдоль оси гидроцилиндра 17.1. Т.к. гидроцилиндр 17.1 жестко скреплен связью 48 с передней кареткой 15, а шток 42, соединенный с поршнем 41, жестко закреплен на задней каретке 16 с помощью крепления 46, задняя каретка 16 тоже начинает перемещаться вправо относительно передней каретки 15. При этом расстояние между креплениями 35 и 36 датчика 29 положения начинает сокращаться.
В этом движении принимают участие подшипники 24, 25 и 26, обеспечивающие отсутствие трения при перемещении и отсутствие нагрева конструкции от трения, и профильные направляющие 21, 22 и 23, обеспечивающие движение задней каретки 16 строго вправо без смещений вверх/вниз и вперед/назад.
5. Вместе с задней кареткой 16 перемещается вправо и жестко закрепленный на ней с помощью крепления 45 шток 44 и поршень 43 второго гидроцилиндра 17.2. Это приводит к повышению давления в его полости 39. Благодаря повышению давления в полости 39 происходит выталкивание жидкости из этой полости в гидролинию 34, и объем полости 39 начинает уменьшаться.
6. Движение жидкости, поступающей из полости 39 второго гидроцилиндра 17.2 в гидролинию 34, показано стрелкой. Через вход/выход 60 указанная жидкость поступает в гидрораспределитель 18, а именно, в созданный блоком 19 электромагнитных клапанов канал 56 низкого давления, по которому она поступает через выход 52 в трубопровод 50 низкого давления, подключенный к гидросистеме трактора (на схеме не показано).
При поступлении команды «Движение влево» (активный уровень на входе 58) блок 19 электромагнитных клапанов в гидрораспределителе 18 формируют его внутреннюю гидравлическую схему таким образом, что (Фиг.2а):
1. Формируется канал 54 высокого давления, выход которого подключен ко второму гидравлическому входу/выходу 60 гидрораспределителя 18. Причем в канал 54 поступает жидкость из подключенного к гидравлическому входу 51 трубопровода 49 высокого давления подключенного к гидросистеме трактора (На схеме не показано).
2. Формируется канал 55 низкого давления, выход которого подключен к гидравлическому выходу 52 гидрораспределителя 18, а вход подключен к первому входу/выходу 59 гидрораспределителя 18.
3. Со второго гидравлического входа/выхода 60 гидрораспределителя 18 жидкость под высоким давлением поступает в гидролинию 34.
4. Из гидролинии 34 жидкость поступает в полость 39 второго гидроцилиндра 17.2, что приводит к повышению давления в полости 39, благодаря чему на поршень 43 начинает действовать сила, и поршень 43 со штоком 44 начинают перемещаться влево вдоль оси второго гидроцилиндра 17.2. Т.к. гидроцилиндр 17.2 жестко скреплен связью 47 с передней кареткой 15, а шток 44, соединенный с поршнем 43, жестко закреплен на задней каретке 16 с помощью крепления 45, задняя каретка 16 тоже начинает перемещаться влево относительно передней каретки 15. При этом расстояние между креплениями 35 и 36 датчика 29 положения начинает увеличиваться.
В этом движении принимают участие подшипники 24, 25 и 26, обеспечивающие отсутствие трения при перемещении и отсутствие нагрева конструкции от трения, и направляющие 21, 22 и 23, обеспечивающие движение задней каретки 16 строго влево без смещений вверх/вниз и вперед/назад.
5. Вместе с задней кареткой 16 перемещается влево и жестко закрепленный на ней с помощью крепления 46 шток 42 и поршень 41 первого гидроцилиндра 17.1. Это приводит к повышению давления в его полости 38. Благодаря повышению давления в полости 38 происходит выталкивание жидкости из этой полости в трубопровод 33, и объем полости 38 начинает уменьшаться.
6. Движение жидкости, поступающей из полости 38 первого гидроцилиндра 17.1 в гидролинию 33, показано стрелкой. Через вход/выход 59 указанная жидкость поступает в гидрораспределитель 18, а именно в созданный блоком 19 электромагнитных клапанов канал 55 низкого давления, по которому она поступает через выход 52 в трубопровод 50 низкого давления, подключенный к гидросистеме трактора (на схеме не показано).
При отсутствии активных уровней на входах 57 и 58 выполняется команда «Стоп». При этом блок 19 электромагнитных клапанов в гидрораспределителе 18 закрывает каналы высокого давления 53 и 54 и каналы низкого давления 55 и 56. Это приводит к тому что движение жидкости в трубопроводах 33 и 34 останавливается, положение поршней 41 и 43 первого 17.1 и второго 17.2 гидроцилиндров фиксируется, что приводит к фиксации передней 15 каретки и задней 16 кареток друг относительно друга.
При выполнении команд «Движение влево» и «Движение вправо», перемещение задней каретки 16 относительно передней каретки 15 измеряется датчиком 29 линейного положения. Результаты измерений поступают в блок 2 управления. При этом сигналы с камеры 3, датчика 4, датчика 5 и датчика 29, характеризующие реальную обстановку - положение обрабатывающего агрегата относительно обрабатываемых рядов растений и его скорость, поступают в компьютер 7 для обработки и отображения на экране монитора 10. Одним из результатов указанной обработки является выработка компьютером 7 сигналов управления смещением рамы культиватора в горизонтальном направлении, которые направляются компьютером 7 в реальном времени в блок 2 управления, и который по ним формирует командные сигналы 57 и 58, управляющие работой гидрораспределителя 18.
Таким образом подвижная задняя каретка 16 смещается относительно неподвижной передней каретки 15, за счет чего происходит возвращение сельскохозяйственного орудия на линию обработки.
Заявляемое устройство позволяет сельскохозяйственному орудию быстро реагировать на смещение оси движения трактора относительно оси междурядья, в которых расположены культиваторные модули, и смещать раму культиватора с помощью соответствующего управления относительно трактора в правую или в левую сторону и обратно, благодаря чему предотвращается повреждение рядков культурных растений культиваторным модулем; при этом смещение происходит без снижения скорости работы трактора, скорость движения культиватора значительно возрастает (в 3-4 раза), так же возможно работать в ночное время, значительно увеличивается производительность в сутки (в 3-6 раз).
Промышленная применимость.
Заявляемое устройство бокового смещения рамы пропашного культиватора найдет широкое применение для механической обработки междурядий культурных сельскохозяйственных растений, внесения удобрений, химикатов, в корневую зону или на поверхностную плоскость.
Источники информации.
1. Патент на изобретение FR2641234 Устройство для присоединения прицепа к трактору (МПК A01B59/002; Заявитель: CARUELLE [FR]. Опубликовано 03.06.1994.
2. Патент на изобретение CA3018862. System for connecting implement to mobile machinery. МПК A01B59/002; заявитель MOLLICK PETER J [US]. Опубликовано. 27.03.2020.
3. Патент на изобретение US2020037489 Cистема для соединения нескольких орудий с трехточечной навеской мобильных машин для управляемого бокового смещения соединенных орудий (МПК A01B59/002 , заявитель MOLLICK PETER J [US]. Опубликовано 06.02.2020.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА АВТОПОЗИЦИОНИРОВАНИЯ КУЛЬТИВАТОРА | 2019 |
|
RU2703483C1 |
| Культиватор | 1990 |
|
SU1773315A1 |
| ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ С УСТРОЙСТВОМ ОБРАТНОГО ПРИКАТЫВАНИЯ | 2014 |
|
RU2654725C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ИЗМЕНЕНИЯ ГЛУБИНЫ ОБРАБОТКИ ПОЧВЫ КУЛЬТИВАТОРОМ, ПЕРЕМЕЩАЕМЫМ ЭНЕРГЕТИЧЕСКИМ СРЕДСТВОМ С ТРЕХТОЧЕЧНОЙ НАВЕСКОЙ | 2022 |
|
RU2806157C1 |
| РУЛЕВАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАКТОРОМ ПОВОРОТОМ ПОЛУРАМ | 2014 |
|
RU2547966C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УВЕЛИЧЕНИЯ НАГРУЗКИ НА ВЕДУЩИЕ ЗАДНИЕ КОЛЕСА ТРАКТОРОВ В ПРОЦЕССЕ КУЛЬТИВАЦИИ ПОЧВЫ | 2019 |
|
RU2709672C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ | 2009 |
|
RU2415528C1 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА УНИВЕРСАЛА | 2014 |
|
RU2577746C2 |
| РУЛЕВАЯ СИСТЕМА ПОВОРОТА БАЛКИ МОСТА И ПОЛУРАМ ТРАКТОРА | 2014 |
|
RU2555875C1 |




Изобретение относится к сельскому хозяйству. Устройство бокового смещения рамы пропашного культиватора для междурядной обработки с системой точного наведения (100) содержит датчик скорости перемещения рамы культиватора (5), датчик пространственного позиционирования рамы культиватора (4), оптическую камеру (3), компьютер (7) с сенсорным монитором (10), установленный в кабине трактора, и механический блок смещения рамы (6). Механический блок смещения рамы (6) состоит из передней каретки (15), жестко связанной с трактором, и задней каретки (16), жестко связанной с рамой культиватора, выполненных с возможностью горизонтального перемещения кареток (15 и 16) друг относительно друга на комбинированных подшипниках, установленных в задней каретке (16) по направляющим, установленным в передней каретке (15), и приводимых в движение гидроприводом. На механическом блоке смещения (6) установлен электронный блок управления смещением (2) с возможностью получения сигналов от системы точного наведения, датчика скорости перемещения рамы культиватора (5), датчика пространственного позиционирования рамы культиватора (4), оптической камеры (3), компьютера (7) с сенсорным монитором (10), установленного в кабине трактора, который управляет гидроприводом смещения. Гидравлический привод смещения установлен на механическом блоке смещения (6) и состоит из первого и второго гидроцилиндров (17.1 и 17.2), связанных гидравлическими линиями (33 и 34) с управляющим гидрораспределителем (18) с блоком электромагнитных клапанов (19), соединенным электрическими связями с электронным блоком управления смещением (2). Между первым и вторым гидроцилиндрами (17.1 и 17.2) расположен потенциометрический датчик положения (29), механически соединенный с передней и задней каретками (15 и 16) с возможностью передачи сигналов в блок управления (2). К задней каретке (16) жестко присоединены штоки (42 и 44) первого и второго гидроцилиндров (17.1 и 17.2), корпуса которых расположены и жестко закреплены внутри передней каретки (15). Гидрораспределитель (18) связан гидравлически с напорной и сливной магистралями гидросистемы трактора. Первый и второй электрические входы (57 и 58) гидрораспределителя (18), являющиеся входами блока электромагнитных клапанов (19), подключены соответственно к первому и второму выходам блока управления (2), а вход блока управления (2) подключен к электрическому выходу потенциометрического датчика положения (29). В состав гидрораспределителя (18) входит блок электромагнитных клапанов (19), принимающий команды от блока управления (2), поступающие на него через первый и второй электрические входы (57 и 58) гидрораспределителя (18), и задающий одно из трех состояний механического блока смещения (2): «Стоп», «Движение влево» или «Движение вправо». Обеспечивается упрощение конструкции и снижение массы устройства, а также быстрое реагирование на смещение оси движения трактора относительно оси междурядья, предотвращение повреждения рядков культурных растений, увеличение производительности. 4 з.п. ф-лы, 8 ил.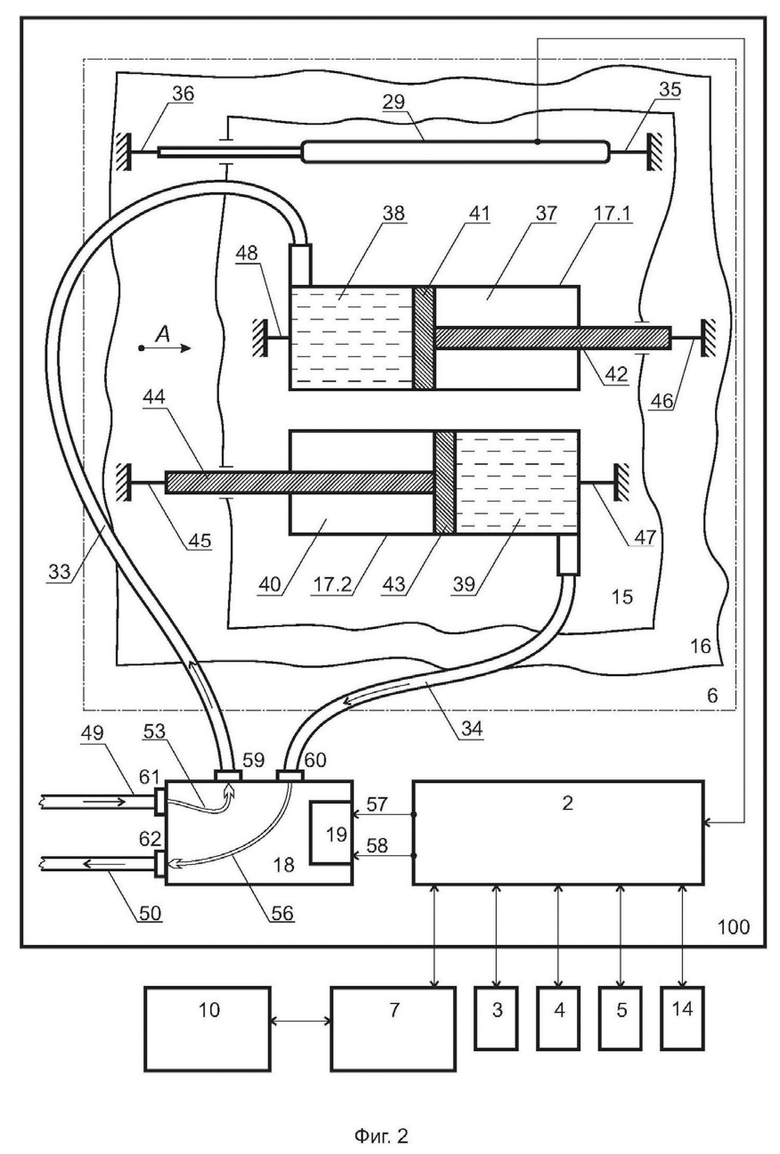
1. Устройство бокового смещения рамы пропашного культиватора для междурядной обработки с системой точного наведения, характеризующееся тем, что содержит датчик скорости перемещения рамы культиватора, датчик пространственного позиционирования рамы культиватора, оптическую камеру, компьютер с сенсорным монитором, установленный в кабине трактора, механический блок смещения рамы, состоящий из передней каретки, жестко связанной с трактором, и задней каретки, жестко связанной с рамой культиватора, выполненных с возможностью горизонтального перемещения кареток друг относительно друга на комбинированных подшипниках, установленных в задней каретке по направляющим, установленным в передней каретке, и приводимых в движение гидроприводом, электронный блок управления смещением, установленный на механическом блоке смещения с возможностью получения сигналов от системы точного наведения, датчика скорости перемещения рамы культиватора, датчика пространственного позиционирования рамы культиватора, оптической камеры, компьютера с сенсорным монитором, установленного в кабине трактора, и управляющий гидроприводом смещения, причем гидравлический привод смещения установлен на механическом блоке смещения и состоит из первого и второго гидроцилиндров, связанных гидравлическими линиями с управляющим гидрораспределителем с блоком электромагнитных клапанов, соединенным электрическими связями с электронным блоком управления смещением, потенциометрический датчик положения, расположенный между первым и вторым гидроцилиндрами и механически соединенный с передней и задней каретками с возможностью передачи сигналов в блок управления, при этом к задней каретке жестко присоединены штоки первого и второго гидроцилиндров, корпуса которых расположены и жестко закреплены внутри передней каретки, при этом гидрораспределитель связан гидравлически с напорной и сливной магистралями гидросистемы трактора, при этом первый и второй электрические входы гидрораспределителя, являющиеся входами блока электромагнитных клапанов, подключены, соответственно, к первому и второму выходам блока управления, а вход блока управления подключен к электрическому выходу потенциометрического датчика положения, причем в состав гидрораспределителя входит блок электромагнитных клапанов, принимающий команды от блока управления, поступающие на него через первый и второй электрические входы гидрораспределителя, и задающий одно из трех состояний механического блока смещения: «Стоп», «Движение влево» или «Движение вправо».
2. Устройство бокового смещения по п.1, характеризующееся тем, что передняя каретка жестко закреплена на трехточечном навесном устройстве трактора, задняя каретка жестко закреплена на раме культиватора с помощью кронштейнов.
3. Устройство бокового смещения по п.1, характеризующееся тем, что задняя каретка содержит комбинированные подшипники, парами установленные в трех уровнях, а именно: в верхнем уровне расположена пара горизонтальных верхних подшипников, перемещающихся по верхней направляющей передней каретки, на среднем уровне размещена пара вертикально расположенных центральных подшипников, перемещающихся по средней направляющей передней каретки, на нижнем уровне расположена пара горизонтальных нижних подшипников, перемещающихся по нижней направляющей передней каретки.
4. Устройство бокового смещения по п.1, характеризующееся тем, что внутри корпуса передней каретки выполнены две симметричные ниши для установки первого и второго гидроцилиндров, над которыми выполнены профильные направляющие – верхняя и средняя, а под нишами выполнена нижняя направляющая для размещения комбинированных подшипников, установленных в задней каретке.
5. Устройство бокового смещения по п.1, характеризующееся тем, что передняя каретка выполнена с двумя нишами с внешней стороны корпуса, причем блок управления смещением установлен в первой нише с внешней стороны корпуса передней каретки и закрыт первым защитным экраном, а гидрораспределитель установлен во второй нише и закрыт вторым защитным экраном.
| ОПТИКО-ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА АВТОПОЗИЦИОНИРОВАНИЯ КУЛЬТИВАТОРА | 2019 |
|
RU2703483C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА | 2018 |
|
RU2771097C2 |
| CN 111026119 A, 17.04.2020 | |||
| EP 3685647 A1, 29.07.2020 | |||
| EP 3360401 A1, 15.08.2018 | |||
| DE 4004247 A1, 14.08.1991 | |||
| US 2020037489 A1, 06.02.2020. | |||
