Изобретение относится к области сельского хозяйства, в частности к конструкциям машин для обработки почвы, и может быть использовано в качестве машины для обработки почвы в плодопитомниках, лесопитомниках и овощных хозяйствах.
Известен культиватор межстрочный навесной, состоящий из рамы, содержащей навесное устройство, рабочих органов, соединенных с рамой с помощью параллелограммного механизма и управляющего устройства с сидением для рабочего и рулевым механизмом, включающим рычаг управления, двух поворотных рамок, рулевых тяг и двух опорных колес, закрепленных на раме шарнирно с помощью вилки с вертикальной осью вращения (патент на полезную модель №163245 РФ).
Известна машина для междурядной и приствольной обработки почвы, состоящая из рамы, содержащей навесное устройство и кронштейны, опорных колес и модулей, каждый из которых состоит из двух ротационных рабочих органов, установленных на поворотных рамках, шарнирно соединенных с рамой с возможностью поворота в вертикальной плоскости, рычагов управления, соединенных с поворотными рамками. На раме установлены сиденья для операторов (патент на полезную модель №214424 РФ).
К недостаткам аналогов относятся: отсутствие комфортных условий труда операторов, обусловленное ручным управлением рабочих органов и повышенной запыленностью рабочих мест, которые находятся вблизи обрабатываемых рабочими органами зон, и приводящее к снижению производительности машины; повышенные требования безопасности операторов; сложность конструкции машины.
В качестве прототипа выбрана машина для междурядной и приствольной обработки почвы, состоящая из рамы, содержащей поперечную балку, навесное устройство и кронштейны, а также опорных колес и модулей. Каждый модуль состоит из корпуса, на котором шарнирно установлены поворотные рамки с возможностью поворота в вертикальной плоскости и который присоединен к поперечной балке. Корпус имеет возможность перемещения с одной степенью свободы вдоль поперечной балки посредством винтового механизма, состоящего из винта и гайки. Винт относительно поперечной балки имеет одну степень свободы с возможностью вращения посредством установленного на раме сервопривода, электрически посредством электропроводов соединенного с контроллером, который также электрически соединен с управляющим устройством, датчиком скорости машины и видеосистемой, которая также электрически соединена с дисплеем. Гайка установлена на корпусе. Поворотные рамки посредством тяг соединены со штоком гидроцилиндра, установленного на корпусе и гидравлически посредством трубопроводов соединенного с гидрораспределителем, также гидравлически соединенным с гидросистемой трактора и электрически соединенным с контроллером. На каждой поворотной рамке установлен ротационный рабочий орган. Гидроцилиндр и гидрораспределитель предназначены для изменения зазора между рабочими органами при обработке рядка культурных растений, высаженных с большим шагом, и обеспечивает обработку почвы между растениями в рядке, например, в молодых садах (патент на изобретение №2767791 РФ). Однако в плодопитомниках, лесопитомниках и овощных хозяйствах, в которых культурные растения в рядке высажены с небольшим шагом с пересекающимися защитными зонами, обработка почвы между культурными растениями в рядке не требуется, вследствие чего целесообразно исключение гидроцилиндра и гидрораспределителя, что упрощает конструкцию машины.
Недостатком прототипа является сложность конструкции машины.
Техническая проблема, решение которой обеспечивается при осуществлении изобретения, заключается в сложности конструкции машины.
Решение этой технической проблемы достигается тем, что в машине для обработки почвы, состоящей из рамы, содержащей поперечную балку, навесное устройство и кронштейны, а также опорных колес, видеосистемы, электрически посредством электропроводов соединенной с дисплеем, и модуля, который состоит из корпуса, на котором шарнирно установлены поворотные рамки с возможностью поворота в вертикальной плоскости и который присоединен к поперечной балке с возможностью перемещения вдоль этой балки с одной степенью свободы посредством винтового механизма, состоящего из винта и гайки, причем винт относительно поперечной балки имеет одну степень свободы с возможностью вращения посредством сервопривода, установленного на раме и электрически соединенного с контроллером, также электрически соединенным с управляющим устройством, датчиком скорости машины и видеосистемой, а гайка установлена на корпусе, причем на каждой поворотной рамке установлен ротационный рабочий орган, согласно изобретению, поворотные рамки соединены посредством тяг с дополнительной гайкой, установленной на продольном винте, который соединен с корпусом с одной степенью свободы относительно корпуса с возможностью вращения. Упрощение конструкции машины достигается применением дополнительной гайки и продольного винта.
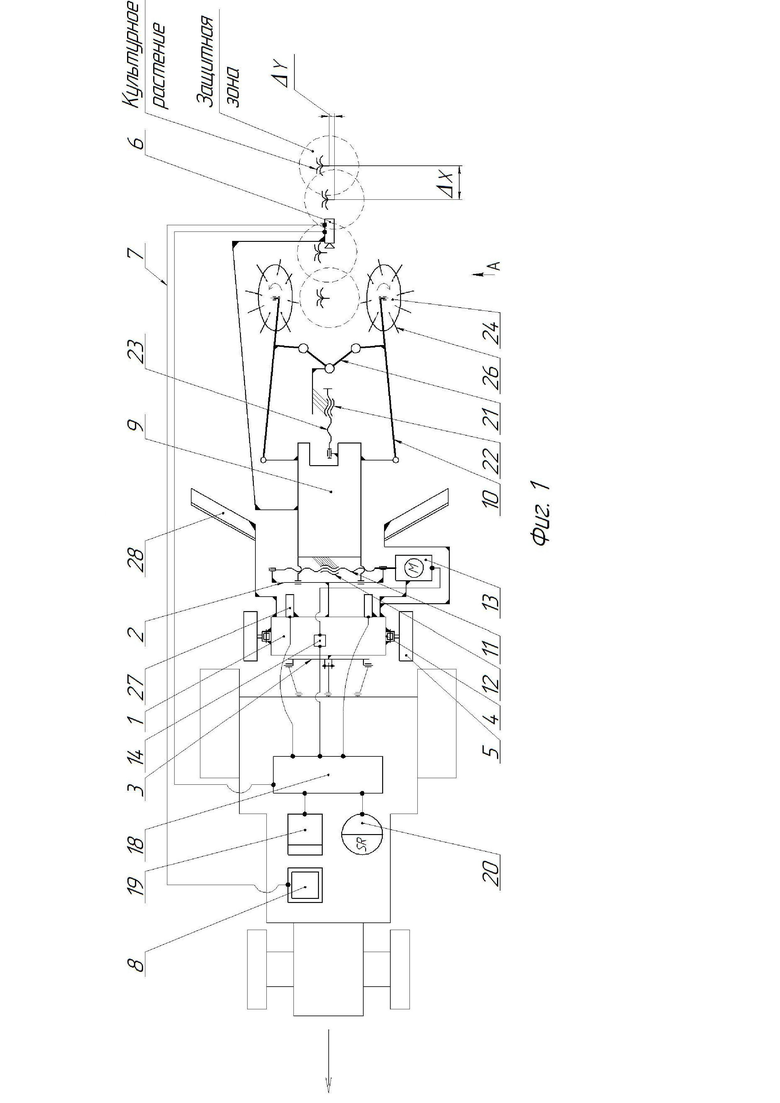
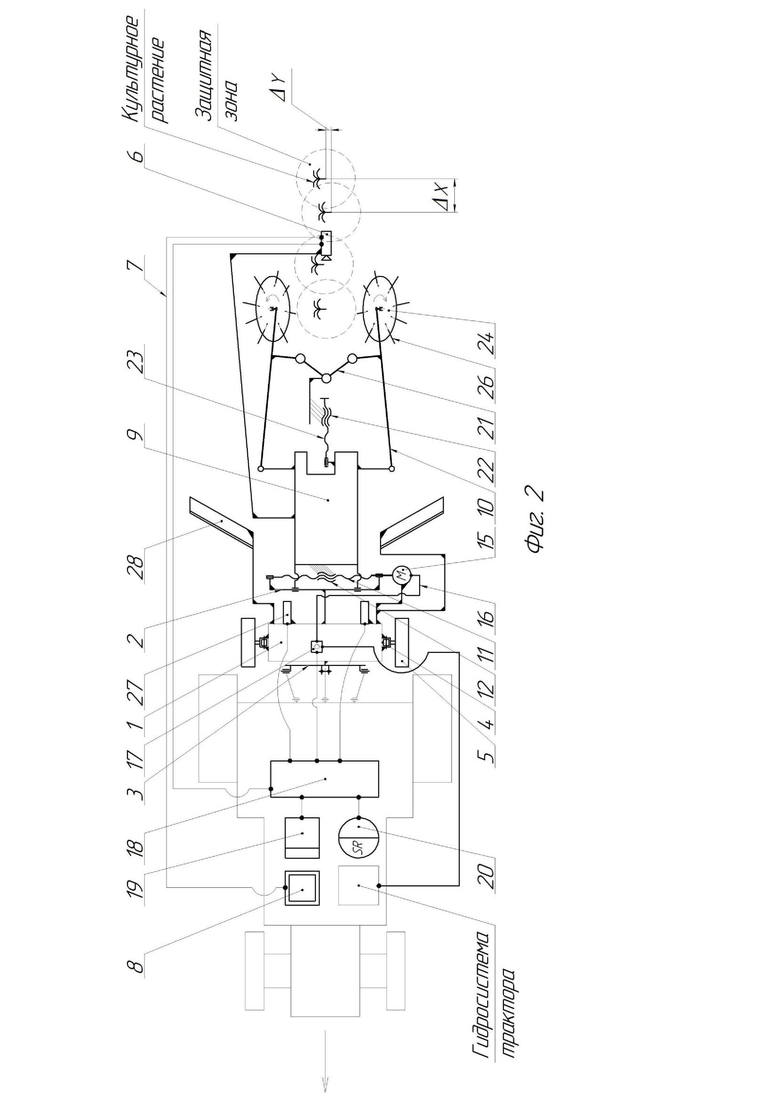
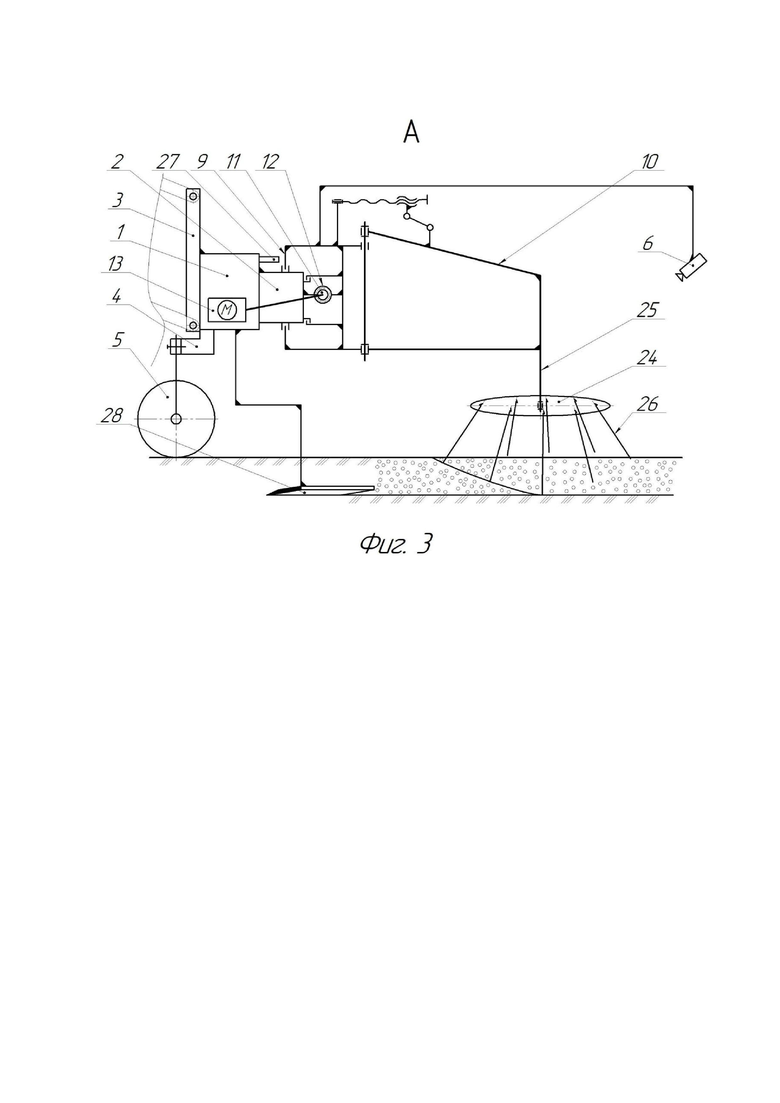
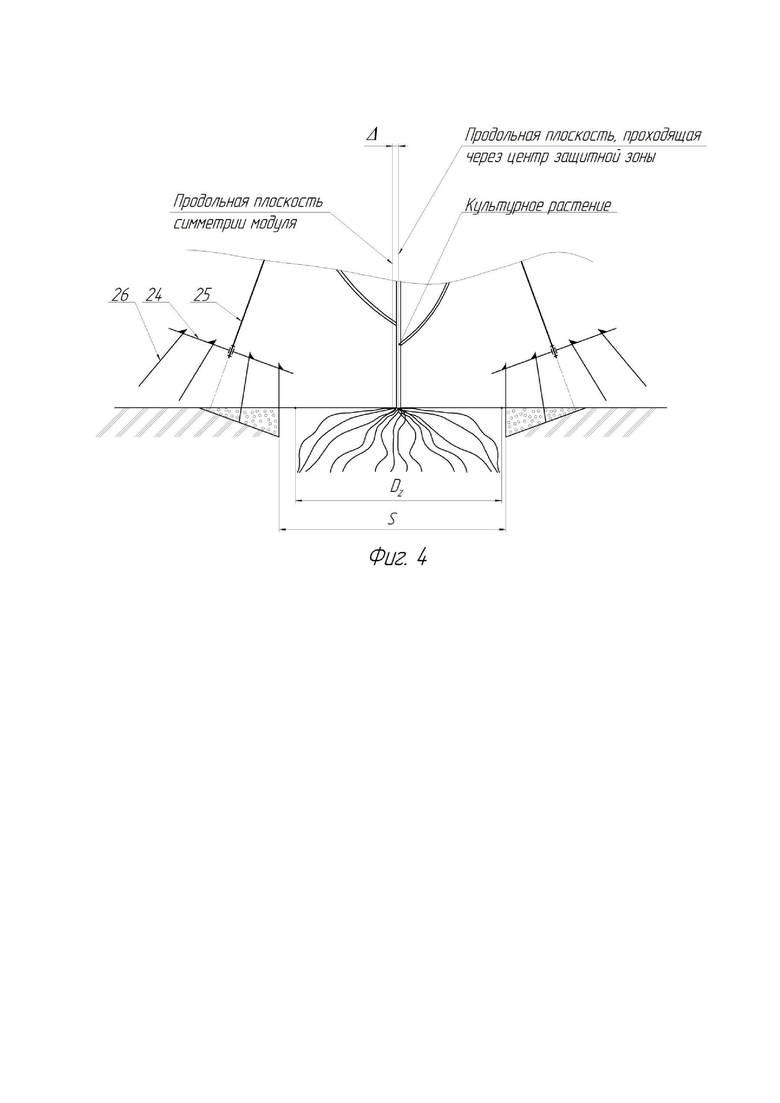
Техническая сущность предложенного технического решения поясняется чертежом, на котором: на фиг.1 и фиг.2 изображена схема машины, агрегатированной с трактором, вид сверху, по вариантам 1 и 2 соответственно; на фиг.3 изображен вид А фиг.1; на фиг.4 изображена схема расположения рабочих органов.
Кроме этого, на чертеже дополнительно обозначено следующее:
- линией со стрелкой показано направление движения машины;
- стрелками показаны направления вращения рабочих органов.
Машина для обработки почвы состоит из рамы 1, содержащей поперечную балку 2, навесное устройство 3 и кронштейны 4, а также опорных колес 5, видеосистемы 6, электрически посредством электропроводов 7 соединенной с дисплеем 8, и модуля.
Модуль состоит из корпуса 9, на котором шарнирно установлены поворотные рамки 10 с возможностью поворота в вертикальной плоскости. Корпус 9 присоединен к поперечной балке 2 с возможностью перемещения вдоль нее с одной степенью свободы посредством винтового механизма, состоящего из винта 11 и гайки 12. Винт 11 относительно поперечной балки 2 имеет одну степень свободы с возможностью вращения посредством установленного на раме сервопривода, выполненного, например, по варианту 1 в виде шагового двигателя 13, электрически соединенного с драйвером 14, а по варианту 2 - в виде гидромотора 15, гидравлически посредством трубопроводов 16 соединенного с сервоклапаном 17, который также гидравлически соединен с гидросистемой трактора. Гайка 12 установлена на корпусе 9. Контроллер 18 электрически соединен, по варианту 1, с драйвером 14, а по варианту 2 - с сервоклапаном 17. Контроллер 18 также электрически соединен с управляющим устройством 19, датчиком 20 скорости машины и видеосистемой 6.
Поворотные рамки 10 посредством тяг 21 соединены с дополнительной гайкой 22, установленной на продольном винте 23, который соединен с корпусом 9 с одной степенью свободы относительно корпуса 9 с возможностью вращения.
На каждой поворотной рамке 10 установлен ротационный рабочий орган, который может быть выполнен, например, в виде диска 24, установленного на оси 25, закрепленной под острым углом к продольной плоскости, с пальцами 26, жестко закрепленными по периферии диска 24 под острым углом к оси 25.
Также машина может содержать ограничители 27 перемещения модуля, выполненные в виде, например, датчиков приближения и закрепленные на раме 1 и электрически соединенные с контроллером 18, и полольные лапы 28, установленные на раме 1.
Предложенная машина работает следующим образом.
Перед переводом машины в рабочее положение выполняется установка фиксированного значения зазора S между рабочими органами, не меньшего чем диаметр Dz защитной зоны культурных растений, посредством вращения продольного винта 23, приводящего к линейному перемещению в продольном направлении дополнительной гайки 22 и, соответственно, к изменению положения поворотных рамок 10 симметрично продольной плоскости симметрии модуля путем их поворота в вертикальной плоскости.
После перевода машины в рабочее положение машинно-тракторный агрегат начинает движение вдоль рядка культурных растений. Вследствие имеющихся углов наклона оси 25 к продольной плоскости и пальцев 26 к оси 25 пальцы 26 каждого рабочего органа заглубляются на разную величину, что при движении машины приводит к возникновению сил сопротивления почвы разной величины. Это влечет за собой неравномерное расположение сил реакции относительно оси вращения диска 24, под действием которых происходит его вращение. За счет этого пальцами 26 осуществляется рыхление почвы и механическое удаление сорняков в приствольных зонах культурных растений. Полольные лапы 28, двигаясь параллельно рядку, рыхлят почву и механически удаляют сорняки в междурядьях.
На контроллер 18 от датчика 20 скорости машины и видеосистемы 6, в обзоре которой находится обрабатываемый рядок, поступают данные, на основе которых контроллер 18 осуществляет расчет расстояния ΔX между соседними культурными растениями по рядку и расстояния ΔY между соседними культурными растениями поперек рядка. По результатам этого расчета сигнал с контроллера 18 поступает, по варианту 1, на шаговый двигатель 13 посредством драйвера 14, а по варианту 2 - на гидромотор 15 посредством сервоклапана 17. В зависимости от направления вращения выходного вала, по варианту 1, шагового двигателя 13, а по варианту 2 - гидромотора 15 происходит вращение винта 11 в том или ином направлении, что приводит к перемещению гайки 12, а вместе с ней и корпуса 9 вдоль поперечной балки 2 таким образом, чтобы расстояние  между продольной плоскостью симметрии модуля и продольной плоскостью, проходящей через центр защитной зоны культурного растения, к которому приближаются рабочие органы модуля, находилось в допустимом диапазоне.
между продольной плоскостью симметрии модуля и продольной плоскостью, проходящей через центр защитной зоны культурного растения, к которому приближаются рабочие органы модуля, находилось в допустимом диапазоне.
При попадании модуля в поле действия ограничителя 27 перемещения модуля сигнал с него поступает на контроллер 18, с которого затем подается сигнал, по варианту 1, на драйвер 14, а по варианту 2 - на сервоклапан 17, что приводит к остановке модуля и предотвращает возникновение аварийной ситуации.
Видеоряд с видеосистемы 6 также передается на дисплей 8, по которому оператор способен отслеживать работу машины. При необходимости оператор вмешивается в управление положением рабочих органов посредством управляющего устройства 19.
Регулирование глубины обработки достигается изменением положения опорных колес 5 относительно кронштейнов 4 по вертикали.
Таким образом, использование предлагаемой машины для обработки почвы приводит к упрощению конструкции машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для междурядной и приствольной обработки почвы | 2023 |
|
RU2814021C1 |
| Машина для междурядной и приствольной обработки почвы | 2022 |
|
RU2806588C1 |
| Машина для междурядной и приствольной обработки почвы | 2021 |
|
RU2767791C1 |
| Роботизированный гусеничный опрыскиватель для обработки сельскохозяйственных культур | 2019 |
|
RU2701663C1 |
| Устройство бокового смещения рамы пропашного культиватора | 2023 |
|
RU2804100C1 |
| Робот-пропольщик | 2019 |
|
RU2703775C1 |
| КУЛЬТИВАТОР УНИВЕРСАЛЬНЫЙ НАВЕСНОЙ | 2002 |
|
RU2273976C2 |
| Прицепной аэрозольный опрыскиватель пропашных культур | 2019 |
|
RU2727637C1 |
| СПОСОБ ВОЗДЕЛЫВАНИЯ КУКУРУЗЫ НА ЗЕРНО, СПОСОБ ЕЕ УБОРКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2141184C1 |
| УСТРОЙСТВО ДЛЯ УНИЧТОЖЕНИЯ СОРНОЙ РАСТИТЕЛЬНОСТИ В РЯДКЕ КУЛЬТУРНЫХ РАСТЕНИЙ | 2012 |
|
RU2494619C1 |
Изобретение относится к сельскому хозяйству. Машина для обработки почвы состоит из рамы, содержащей поперечную балку, навесное устройство и кронштейны, а также опорных колес, видеосистемы и модуля. Модуль состоит из корпуса, на котором шарнирно установлены поворотные рамки с возможностью поворота в вертикальной плоскости и который присоединён к поперечной балке с возможностью перемещения вдоль этой балки с одной степенью свободы посредством винтового механизма, состоящего из винта и гайки. Винт относительно поперечной балки имеет одну степень свободы с возможностью вращения посредством сервопривода, а гайка установлена на корпусе. Поворотные рамки соединены посредством тяг с дополнительной гайкой, установленной на продольном винте, который соединён с корпусом с одной степенью свободы относительно корпуса с возможностью вращения. Сервопривод установлен на раме и электрически соединён с контроллером, также электрически соединённым с управляющим устройством, датчиком скорости машины и видеосистемой, посредством электропроводов соединённой с дисплеем. На каждой поворотной рамке установлен ротационный рабочий орган. Обеспечивается упрощение конструкции машины. 4 ил.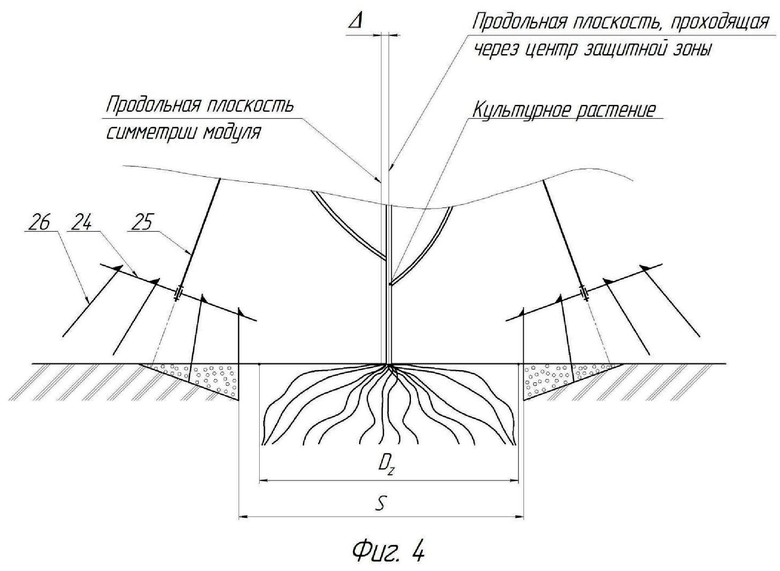
Машина для обработки почвы, состоящая из рамы, содержащей поперечную балку, навесное устройство и кронштейны, а также опорных колес, видеосистемы, электрически посредством электропроводов соединённой с дисплеем, и модуля, который состоит из корпуса, на котором шарнирно установлены поворотные рамки с возможностью поворота в вертикальной плоскости и который присоединён к поперечной балке с возможностью перемещения вдоль этой балки с одной степенью свободы посредством винтового механизма, состоящего из винта и гайки, причём винт относительно поперечной балки имеет одну степень свободы с возможностью вращения посредством сервопривода, установленного на раме и электрически соединённого с контроллером, также электрически соединённым с управляющим устройством, датчиком скорости машины и видеосистемой, а гайка установлена на корпусе, причём на каждой поворотной рамке установлен ротационный рабочий орган, отличающаяся тем, что поворотные рамки соединены посредством тяг с дополнительной гайкой, установленной на продольном винте, который соединён с корпусом с одной степенью свободы относительно корпуса с возможностью вращения.
| Машина для междурядной и приствольной обработки почвы | 2021 |
|
RU2767791C1 |
| Устройство бокового смещения рамы пропашного культиватора | 2023 |
|
RU2804100C1 |
| Ротационный рабочий орган | 1986 |
|
SU1384230A1 |
| Пропашник с качающимися рабочими органами | 1932 |
|
SU33740A1 |
| Установка для переработки металлических отходов | 1980 |
|
SU1006494A1 |
| WO 2021016444 A1, 28.01.2021. | |||
