Изобретение относится к области сельского хозяйства, в частности к конструкциям машин для обработки почвы, и может быть использовано в качестве машины для междурядной и приствольной обработки почвы в плодопитомниках и лесопитомниках, а также в овощных хозяйствах.
Известен культиватор межстрочный навесной, состоящий из несущей рамы с навесным устройством, рабочих органов, соединенных с рамой с помощью параллелограммного механизма и управляющего устройства с сидением для рабочего и рулевым механизмом, включающим рычаг управления, двух поворотных рычагов, рулевых тяг и двух опорных колес, закрепленных на раме шарнирно с помощью вилки с вертикальной осью вращения (патент на полезную модель RU 163245 U1).
Также известен культиватор GS для обработки междурядий фирмы Egedal, состоящий из несущей рамы с навесным устройством, опорных колес, закрепленных на раме, управляющего устройства с сидением для рабочего и рулевым механизмом, включающим рычаг управления, рамок с закрепленными на них рабочими органами в виде зубьев и опорными колесами, причем рамки установлены относительно рамы с возможностью поворота с горизонтальной осью вращения (см. сайт фирмы www.egedal.dk или сайт его поставщика в России https://lessnabrk.ru/).
К недостаткам аналогов относятся: невозможность выполнения междурядной обработки с минимально возможной необработанной защитной приствольной зоной культурных растений; ручное управление рабочими органами, приводящее к повышенным требованиям к безопасности операторов, рабочие места которых находятся вблизи обрабатываемых рабочими органами зон; повышенная запыленность рабочих мест операторов; невозможность комплектации машины требуемым для конкретного хозяйства количеством рабочих органов.
В качестве прототипа выбран культиватор Eco Multi-rangs компании Univerco, состоящий из рамы, содержащей поперечную балку, жестко соединенную с навесным устройством, опорных колес, модулей, каждый из которых состоит из корпуса, присоединенного к поперечной балке, двух рабочих органов роторного типа с вертикальной осью вращения, установленных на поворотных рамках, шарнирно соединенных с корпусом с возможностью поворота в вертикальной плоскости, причем рабочие органы состоят из вала, в нижней части которого установлен диск с пальцами, а в верхней части вал соединен с валом гидромотора. К поворотным рамкам присоединены рычаги управления. На раме установлены сиденья для операторов (см. сайт компании https://univerco.com, https://univerco.com/produit/sarcloirs-eco-multirangs/).
К недостаткам прототипа относятся: ручное управление рабочими органами, приводящее к повышенным требованиям к безопасности операторов, рабочие места которых находятся вблизи обрабатываемых рабочими органами зон; повышенная запыленность рабочих мест операторов; повышенная утомляемость операторов, приводящая к снижению производительности обработки почвы.
Техническая проблема, решение которой обеспечивается при осуществлении изобретения, заключается в ручном управлении рабочими органами, приводящем к повышенным требованиям к безопасности операторов, в плохих условиях работы операторов, в повышенной утомляемости операторов, приводящей к снижению производительности машины.
Решение этой технической проблемы достигается тем, что в машине для междурядной и приствольной обработки почвы, состоящей из рамы, содержащей поперечную балку, навесное устройство и кронштейны, а также опорных колес и модулей, каждый из которых состоит из корпуса, присоединенного к поперечной балке, двух рабочих органов роторного типа с вертикальной осью вращения, установленных на поворотных рамках, шарнирно соединенных с корпусом с возможностью поворота в вертикальной плоскости, причем рабочие органы состоят из вала, в нижней части которого установлен диск с пальцами, а в верхней части вал соединен с валом гидромотора, предусмотрены следующие отличия: корпус модуля имеет возможность перемещения вдоль поперечной балки с одной степенью свободы посредством винтового механизма, состоящего из винта и гайки, винт которого относительно поперечной балки имеет одну степень свободы с возможностью вращения и соединен с валом сервопривода, а гайка соединена с корпусом, причем поворотные рамки посредством тяг соединены с гидроцилиндром, установленным на корпусе и гидравлически соединенным с гидрораспределителем, который гидравлически соединен с гидросистемой трактора и электрически соединен с контроллером, который также электрически соединен с пультом управления, датчиком скорости машины, сервоприводами и системой видеокамер, которая также электрически соединена с дисплеем.
Обеспечение более комфортных и безопасных условий работы операторов, повышение производительности работы машины достигается за счет внедрения автоматизированной системы управления рабочими органами, исключающей нахождение операторов вблизи обрабатываемых рабочими органами зон.
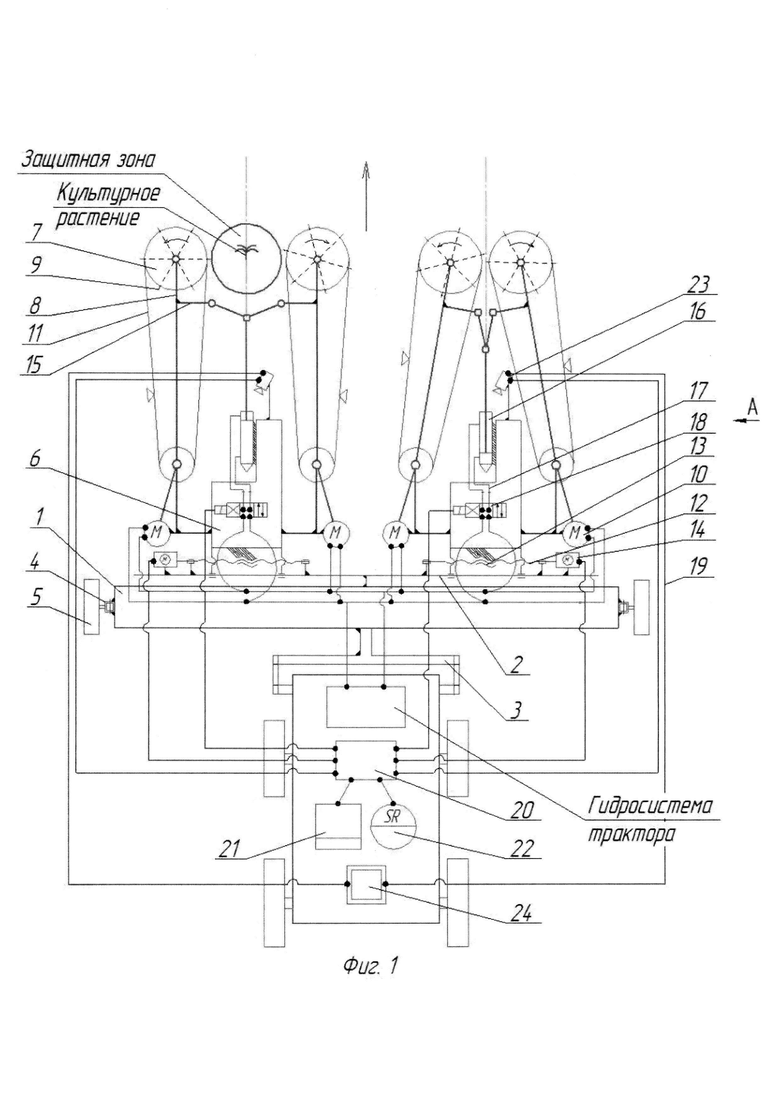
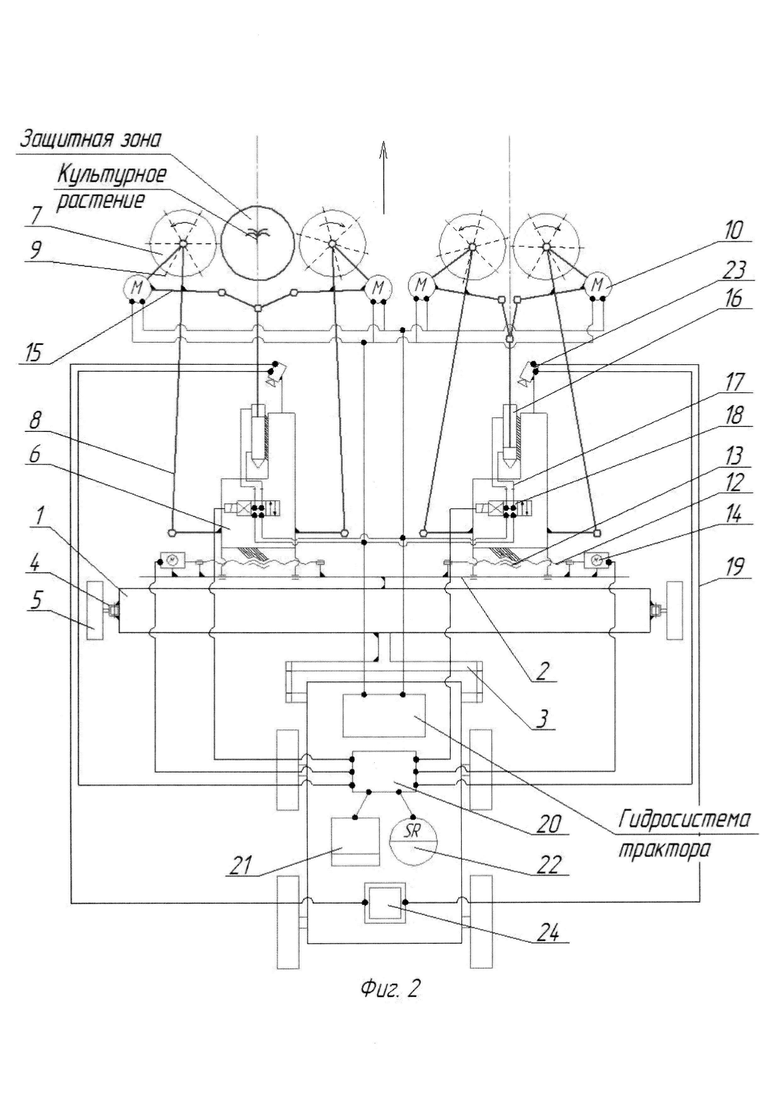
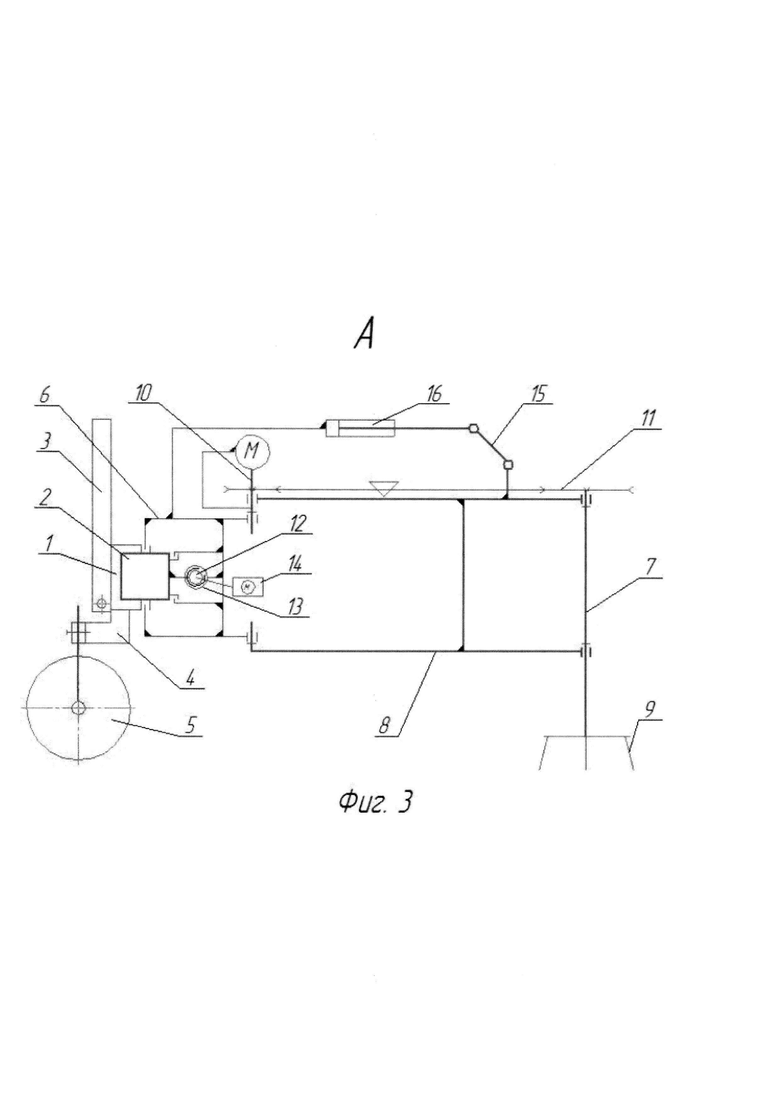
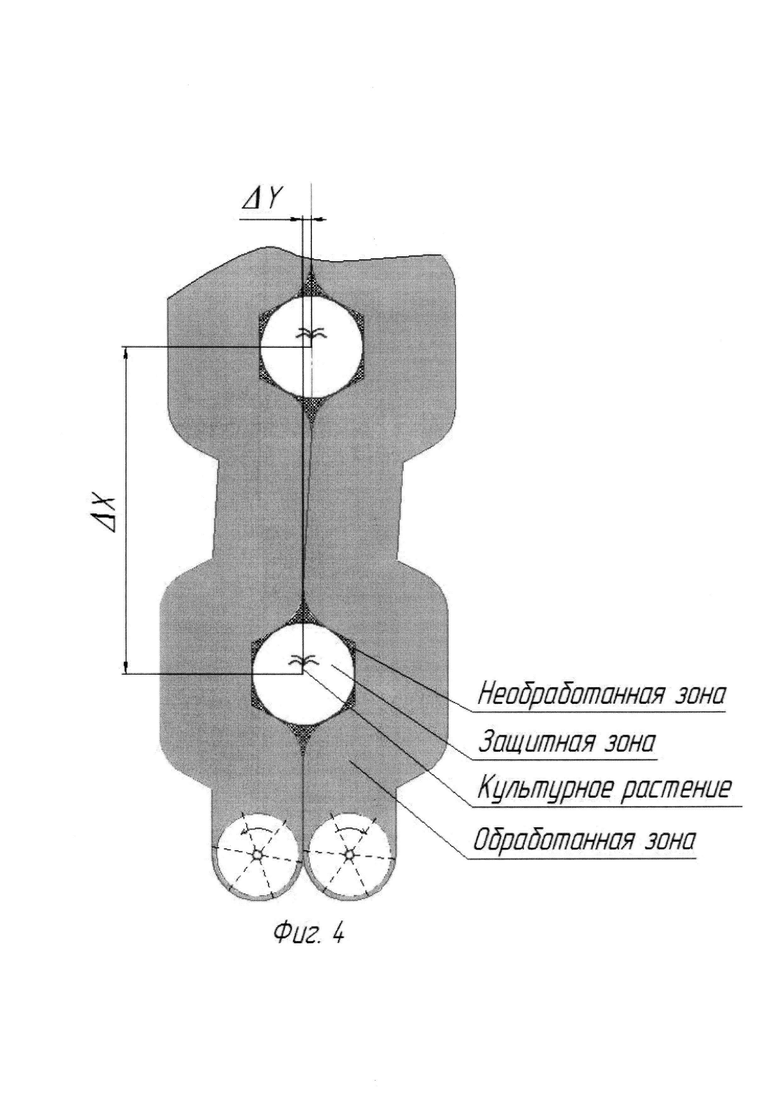
Техническая сущность предложенного технического решения поясняется чертежом, на котором: на фиг. 1 изображена схема машины, вид сверху (вариант 1); на фиг. 2 изображена схема машины, вид сверху (вариант 2); на фиг. 3 изображен вид А фиг. 1; на фиг. 4 изображена схема работы машины.
Кроме этого, на чертеже дополнительно обозначено следующее:
- стрелками показаны направления вращения рабочих органов;
- линией со стрелкой показано направление движения машины;
- штрихпунктирные линии характеризуют расположение рядков обрабатываемых культурных растений.
Машина для междурядной и приствольной обработки почвы состоит из рамы 1, содержащей поперечную балку 2, навесное устройство 3 и кронштейны 4, а также опорных колес 5 и модулей. Каждый модуль состоит из корпуса 6, двух рабочих органов 7 роторного типа с вертикальной осью вращения, установленных на поворотных рамках 8, шарнирно соединенных с корпусом 6 с возможностью поворота в вертикальной плоскости. Рабочие органы 7 состоят из вала, в нижней части которого установлен диск с пальцами 9, а в верхней части вал соединен с валом гидромотора 10 посредством клиноременной передачи 11. Корпус 6 имеет возможность перемещения вдоль поперечной балки 2 с одной степенью свободы посредством винтового механизма, состоящего из винта 12 и гайки 13. Винт 12 относительно поперечной балки 2 имеет одну степень свободы с возможностью вращения и соединен с валом сервопривода 14, а гайка 13 жестко соединена с корпусом 6. Поворотные рамки 8 посредством тяг 15 соединены с гидроцилиндром 16, установленным на корпусе 6 и гидравлически посредством трубопроводов 17 соединенным с гидрораспределителем 18. Гидрораспределитель 18 гидравлически посредством трубопроводов 17 соединен с гидросистемой трактора и электрически посредством электропроводов 19 соединен с контроллером 20, который также электрически соединен с пультом 21 управления, датчиком 22 скорости машины, сервоприводами 14 и системой видеокамер 23, которая также электрически соединена с дисплеем 24. Вал рабочего органа 7 может быть соединен с валом гидромотора 10 напрямую.
Предложенная машина работает следующим образом.
Вращение рабочих органов 7 в противоположных направлениях передается от гидромоторов 10 с помощью клиноременных передач 11 или напрямую. Рабочие органы 7 пальцами 9 рыхлят почву и механически удаляют сорняки в приствольной зоне культурных растений. Изменение положения рабочих органов 7 относительно корпуса 6 модуля обеспечивается гидроцилиндром, воздействие на который передается от контроллера 20 и гидрораспределителя 18. Перемещение корпусов 6 модулей относительно поперечной балки 2 обеспечивается сервоприводами 14, воздействие на которые передается от контроллера 20. В зависимости от направления вращения вала сервопривода 14 происходит вращение винта 12 в том или ином направлении, что приводит к перемещению гайки 13, а вместе с ней и корпуса 6 вдоль поперечной балки 2. Данные, необходимые для изменения положения рабочих органов 7 и корпусов 6, поступают в контроллер 20 от датчика 22 скорости машины и системы видеокамер 23, в обзор которых попадает обрабатываемый рядок. После получения данных контроллер 20 производит расчет величины проекции расстояния до ближайшего культурного растения на прямую направления движения машины Δх и величины проекции расстояния до ближайшего культурного растения на поперечную прямую Δу. Видеоряд с системы видеокамер 23 передается на дисплей 24, по которому оператор способен отслеживать работу машины. Оператор имеет возможность управлять рабочими органами 7 посредством пульта 21 управления. Регулирование глубины обработки достигается изменением положения опорных колес 5 относительно кронштейнов 4.
Таким образом, использование предлагаемой машины для междурядной и приствольной обработки почвы приводит к обеспечению более комфортных и безопасных условий работы операторов, к повышению производительности работы машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для междурядной и приствольной обработки почвы | 2023 |
|
RU2814021C1 |
| Машина для междурядной и приствольной обработки почвы | 2022 |
|
RU2806588C1 |
| Машина для обработки почвы | 2024 |
|
RU2821886C1 |
| ФРОНТАЛЬНЫЙ ФРЕЗЕРНЫЙ КУЛЬТИВАТОР МЕЖДУКУСТОВОЙ ОБРАБОТКИ ВИНОГРАДНИКОВ | 2011 |
|
RU2471322C1 |
| ОПТИКО-ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА АВТОПОЗИЦИОНИРОВАНИЯ КУЛЬТИВАТОРА | 2019 |
|
RU2703483C1 |
| Модульный многофункциональный транспортно-технологический комплекс | 2022 |
|
RU2785589C1 |
| СПОСОБ ВОЗДЕЛЫВАНИЯ БАХЧЕВЫХ КУЛЬТУР И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2121254C1 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПРИСТВОЛЬНЫХ ПОЛОС В САДУ | 2004 |
|
RU2272388C1 |
| КУЛЬТИВАТОР УНИВЕРСАЛЬНЫЙ НАВЕСНОЙ | 2002 |
|
RU2273976C2 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПРИСТВОЛЬНЫХ ПОЛОС В САДУ | 2006 |
|
RU2326516C2 |
Изобретение относится к сельскому хозяйству. Машина для междурядной и приствольной обработки почвы состоит из рамы, содержащей поперечную балку, навесное устройство и кронштейны, а также опорных колес и модулей. Каждый модуль состоит из корпуса, присоединенного к поперечной балке, двух рабочих органов роторного типа с вертикальной осью вращения, установленных на поворотных рамках, шарнирно соединенных с корпусом с возможностью поворота в вертикальной плоскости. Рабочие органы состоят из вала, в нижней части которого установлен диск с пальцами, а в верхней части вал соединен с валом гидромотора. Корпус имеет возможность перемещения вдоль поперечной балки с одной степенью свободы посредством винтового механизма, состоящего из винта и гайки, винт которого относительно поперечной балки имеет одну степень свободы с возможностью вращения и соединен с валом сервопривода, а гайка соединена с корпусом. Поворотные рамки посредством тяг соединены с гидроцилиндром, установленным на корпусе и гидравлически соединенным с гидрораспределителем, который гидравлически соединен с гидросистемой трактора и электрически соединен с контроллером, который также электрически соединен с пультом управления, датчиком скорости машины, сервоприводами и системой видеокамер, которая также электрически соединена с дисплеем. Обеспечиваются более комфортные и безопасные условия работы операторов, повышение производительности работы машины. 4 ил.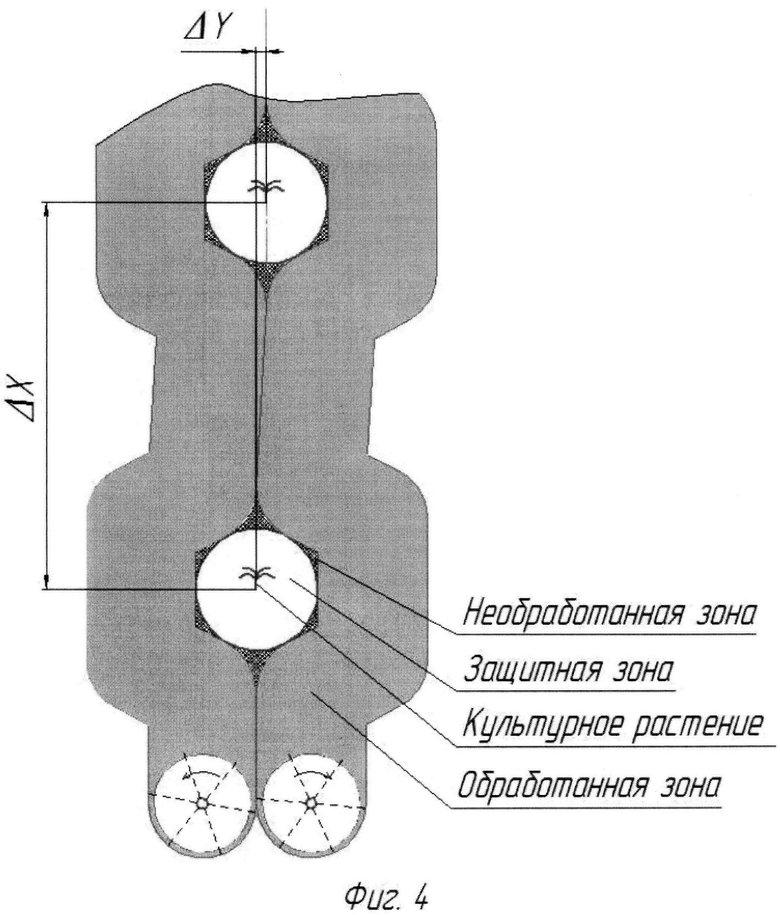
Машина для междурядной и приствольной обработки почвы, состоящая из рамы, содержащей поперечную балку, навесное устройство и кронштейны, а также опорных колес и модулей, каждый из которых состоит из корпуса, присоединенного к поперечной балке, двух рабочих органов роторного типа с вертикальной осью вращения, установленных на поворотных рамках, шарнирно соединенных с корпусом с возможностью поворота в вертикальной плоскости, причем рабочие органы состоят из вала, в нижней части которого установлен диск с пальцами, а в верхней части вал соединен с валом гидромотора, отличающаяся тем, что корпус имеет возможность перемещения вдоль поперечной балки с одной степенью свободы посредством винтового механизма, состоящего из винта и гайки, винт которого относительно поперечной балки имеет одну степень свободы с возможностью вращения и соединен с валом сервопривода, а гайка соединена с корпусом, причем поворотные рамки посредством тяг соединены с гидроцилиндром, установленным на корпусе и гидравлически соединенным с гидрораспределителем, который гидравлически соединен с гидросистемой трактора и электрически соединен с контроллером, который также электрически соединен с пультом управления, датчиком скорости машины, сервоприводами и системой видеокамер, которая также электрически соединена с дисплеем.
| Устройство для обработки почвы в рядах растений | 1990 |
|
SU1729311A1 |
| Фрезерный культиватор | 1984 |
|
SU1232152A1 |
| Агрегат для возделывания высокостебельных культур | 1990 |
|
SU1794335A1 |
| CN 111194582 A, 26.05.2020 | |||
| DE 3738289 A1, 24.05.1989. | |||

