ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к датчикам давления и было разработано с учетом датчиков, имеющих корпус датчика, снабженный мембранной частью, подверженной упругому изгибу или деформации из-за текучей среды, давление которой подлежит измерению.
УРОВЕНЬ ТЕХНИКИ
Датчики указанного типа используются в устройствах для детектирования давления текучих сред (жидкостей и газов) в различных секторах, таких как автомобильный сектор, бытовой сектор и сектор электробытовых приборов, сектор отопления, вентиляции и кондиционирования воздуха, а также сектор гидросанитарии в целом и т.д. Эти устройства детектирования обычно содержат корпус или опору, образующие по меньшей мере один корпус с входом для текучей среды, давление которой должно быть измерено, а также датчик давления в корпусе, так что его мембранная часть подвергается воздействию текучей среды.
Датчик содержит корпус датчика, в целом выполненный из электроизоляционного материала, с полостью, которая закрыта по меньшей мере на одном конце упомянутой мембранной частью. В некоторых типах датчиков (например, некоторых датчиков относительного типа) осевая полость представляет собой по существу глухую осевую полость, закрытую только на грани корпуса датчика, определяемую здесь для простоты как «верхняя грань».
Указанная осевая полость открывается, вместо этого, на противоположной грани корпуса датчика, определяемой здесь как «нижняя грань», и выполнена с возможностью соединения с входом устройства для приема текучей среды. В других типах датчиков (например, некоторых датчиков абсолютного типа) полость, вместо этого, по существу закрыта на обоих ее противоположных концах, на одном из этих концов предусмотрена мембранная часть, внешняя сторона которой подвергается воздействию текучей среды.
Независимо от типа датчика корпус датчика может быть монолитным или состоять из нескольких частей. Например, корпус датчика может быть монолитным для того, чтобы определить как одно целое глухую полость с соответствующей мембранной частью, или же содержать аксиально полый корпус, к верхней грани которого прикреплен относительно тонкий элемент, определяющий мембранную часть, для того, чтобы закрыть указанную полость на одном конце. В других решениях, в которых корпус датчика состоит из множества частей, предусмотрен основной корпус, который образует за одно целое глухую полость, закрытую на верхней грани самой частью корпуса и закрытую на нижней грани элементом, определяющим мембранную часть, нанесенную на основной корпус. Возможно, упомянутый основной корпус может содержать отверстие для установки полости в сообщении с внешней средой. В других датчиках две части корпуса соединены друг с другом посредством кольцевого слоя, состоящего из фиксирующего материала, имеющего определенную толщину, так что полость корпуса датчика ограничена в осевом направлении двумя обращенными друг к другу гранями двух частей корпуса и ограничена по периферии кольцевым слоем фиксирующего материала: в этих случаях одна из двух частей корпуса не обязательно должна образовывать соответствующую полость.
В датчиках указанного типа детектирование давления достигается путем использования упругого изгиба или деформируемости мембранной части, вызванных действием детектируемой текучей среды. Степень изгиба или деформации, которая является репрезентативной для давления текучей среды, измеряется электрически с помощью подходящих средств цепи, предусмотренных непосредственно на мембранной части, эти средства обычно пьезоэлектрического типа, или пьезорезистивного типа, или резистивного типа, или емкостного типа.
Мембранная часть и предусмотренная на ней цепь детектирования представляют собой элементы критичности датчика, в частности, если они подвержены чрезмерным механическим напряжениям из-за давления текучей среды. Такие напряжения могут, например, быть вызваны случайными избыточными давлениями текучей среды, подлежащей детектированию, или же увеличением объема текучей среды из-за ее замерзания: в этих обстоятельствах возможно вызвать чрезмерный изгиб мембранной части, что может вызвать ее отказ и/или прерывание нанесенных на нее электрических соединительных дорожек, которые принадлежат цепи детектирования. Эти проблемы механического типа в целом решаются путем размещения датчика давления или устройства, в которое он встроен, с подходящими элементами механической компенсации, например, как описано в WO 2008/078184 A.
Однако заявитель обнаружил, что в некоторых типах датчиков давления избыточное напряжение текучей среды на мембранной части - то есть избыточное давление - может иногда приводить к неточным детектированиям, даже не вызывая отказа самого датчика или его частей.
Например, как уже упоминалось, некоторые датчики давления преимущественно состоят из монолитного корпуса, по существу без глухой полости, на нижней грани которого герметично наносится - через кольцевой слой подходящего материала, например, адгезива - элемент, определяющий мембранную часть. Таким образом, материал, который герметично соединяет две части по периферии, образует полость. В такой конфигурации элемент, определяющий мембранную часть, по существу расположен параллельно нижней грани монолитного корпуса на определенном расстоянии от него. Это расстояние, зависящее от толщины слоя фиксирующего материала, в целом является относительно небольшим (порядка десятков микрометров).
В этих датчиках корпус датчика обычно поддерживает устройство цепи, имещее первую часть, которая включает первый рисунок электрической цепи, выполненный из электропроводящего материала, нанесенного на верхнюю грань монолитного корпуса, к которой могут быть подключены различные компоненты цепи для обработки сигнала, представляющего значение давления (например, для целей усиления или обработки). Вместо этого электрический сигнал, представляющий значение давления, получают из второй части устройства цепи, включающей в себя второй рисунок электрической цепи, который обеспечивает или соединен со средствами, предназначенными для детектирования изгиба или деформации мембранной части, например, серия электрических резисторов, соединенных с образованием моста Уитстона. Два рисунка цепи электрически соединены друг с другом через соединительные элементы, которые проходят в осевом направлении корпуса датчика: эти соединительные элементы часто содержат по меньшей мере сквозные отверстия в монолитном корпусе, которые проходят в осевом направлении между его двумя противоположными гранями, предусмотренными на внутренней стороне, которая является электропроводящим материалом, контактирующим с обеими рисунками цепи.
Второй рисунок электрической цепи, например, указанный мостик Уитстона, сформирован на «внутренней» грани элемента, который определяет мембранную часть, то есть грань, которая должна быть обращена внутрь полости корпуса датчика (или, другими словами, грань мембранного элемента, противоположная той, которая должна подвергаться воздействию текучей среды). Как указано выше, вышеупомянутая внутренняя грань относительно близка к нижней грани монолитного корпуса.
Заявителем, например, было обнаружено, что в датчиках указанного типа чрезмерный изгиб деформации мембранной части из-за избыточного давления текучей среды может иногда приводить к контакту между центральной областью указанной мембранной части и нижней гранью монолитного тела или с его частями в рельефе, и указанный контакт может приводить к заметным ошибкам детектирования значения давления.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Настоящее изобретение в основном направлено на создание датчика давления, имеющего простую, недорогую и надежную конструкцию, которая позволяет решить проблему, упомянутую выше. Эта и другие цели, которые будут очевидны далее, достигаются согласно изобретению с помощью датчика давления и устройства, включающего такой датчик давления, имеющих характеристики, указанные в прилагаемой формуле изобретения, которые являются неотъемлемой частью технического решения, представленного в настоящем документе в отношении изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Дополнительные задачи, характеристики и преимущества изобретения очевидны из последующего описания со ссылкой на прилагаемые чертежи, которые представлены исключительно в качестве неограничивающего примера и на которых:
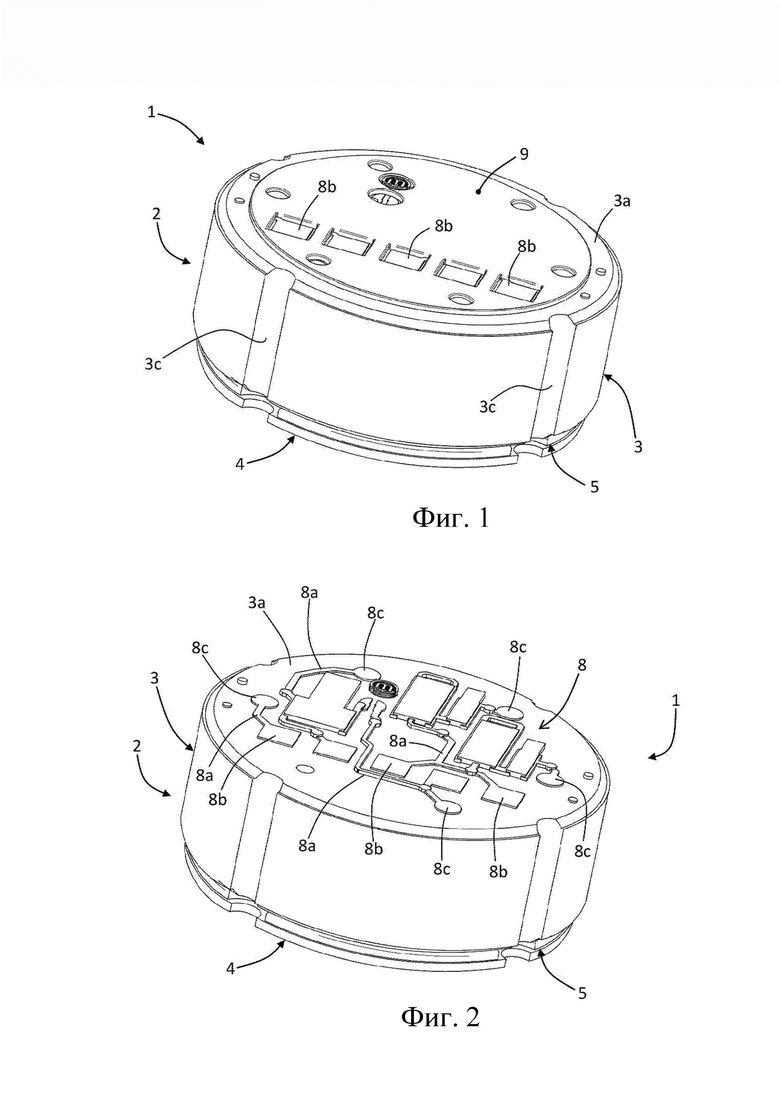
- фиг. 1 представляет собой схематический вид в аксонометрии датчика давления в соответствии с возможными вариантами осуществления изобретения;
- фиг. 2 представляет собой схематический вид в аксонометрии датчика с фиг. 1 с удаленным верхним защитным слоем;
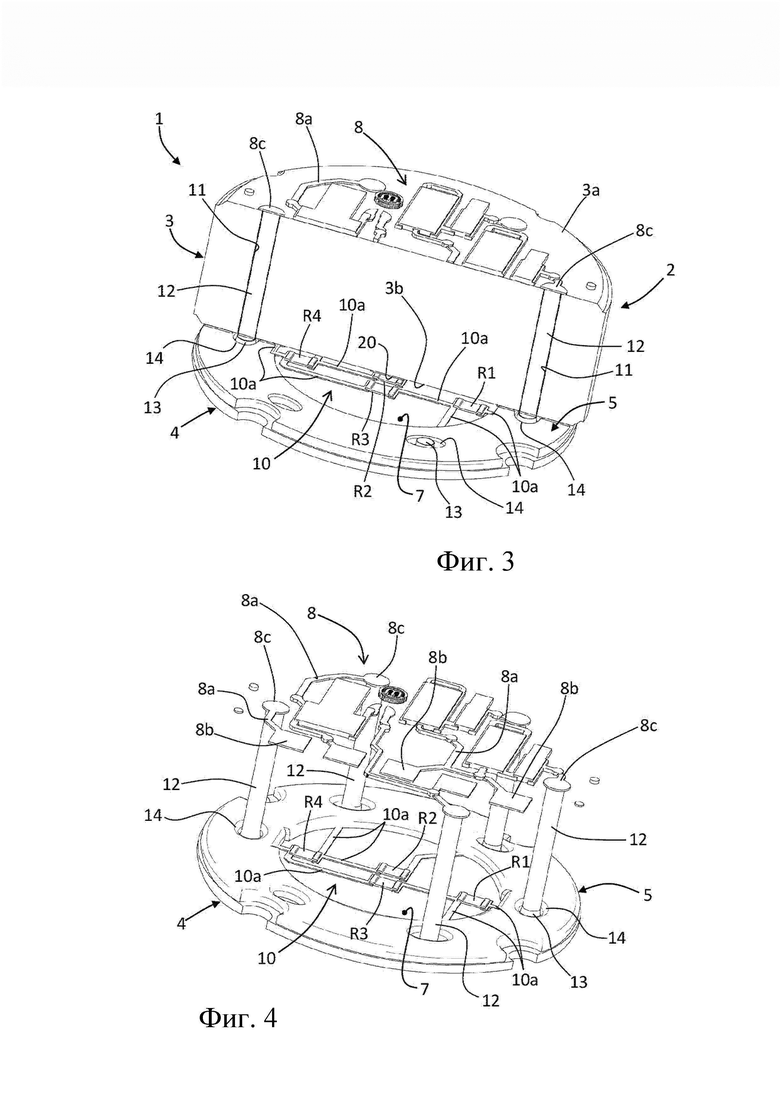
- фиг. 3 представляет собой схематический вид в аксонометрии и в частичном разрезе датчика с фиг. 2;
- фиг. 4 представляет собой схематический вид в аксонометрии датчика с фиг. 2 с удаленным монолитным корпусом;
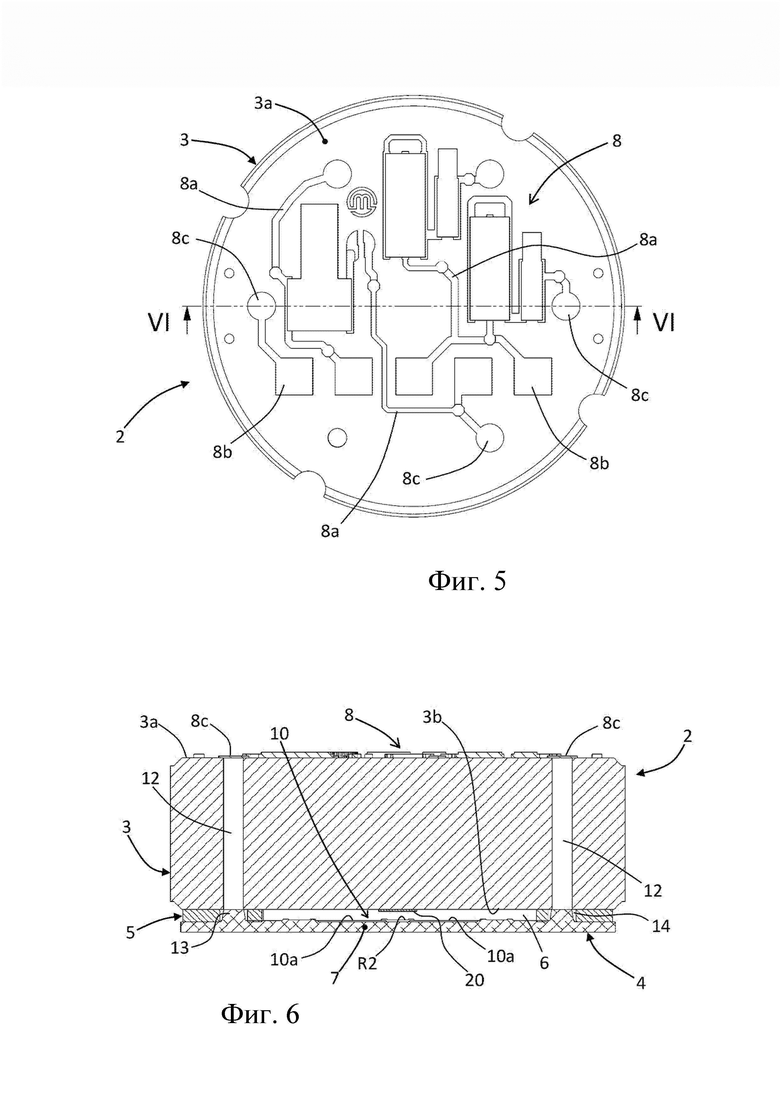
- фиг. 5 представляет собой схематический вид сверху датчика с фиг. 2;
- фиг. 6 представляет собой схематический вид в поперечном сечении в соответствии с линией VI-VI с фиг. 5, причем датчик находится в первом состоянии;
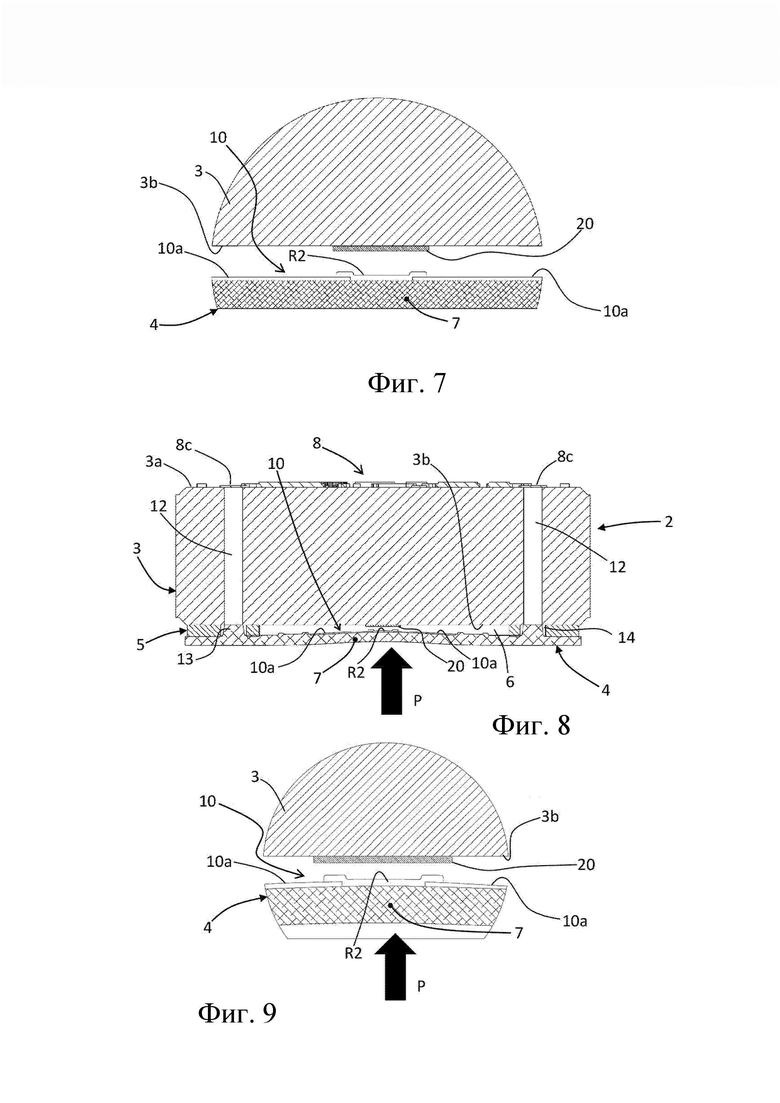
- фиг. 7 иллюстрирует деталь в увеличенном масштабе с фиг. 6;
- фиг. 8 и 9 представляют собой виды, аналогичные показанным на фиг. 6-7, при этом датчик находится во втором состоянии;
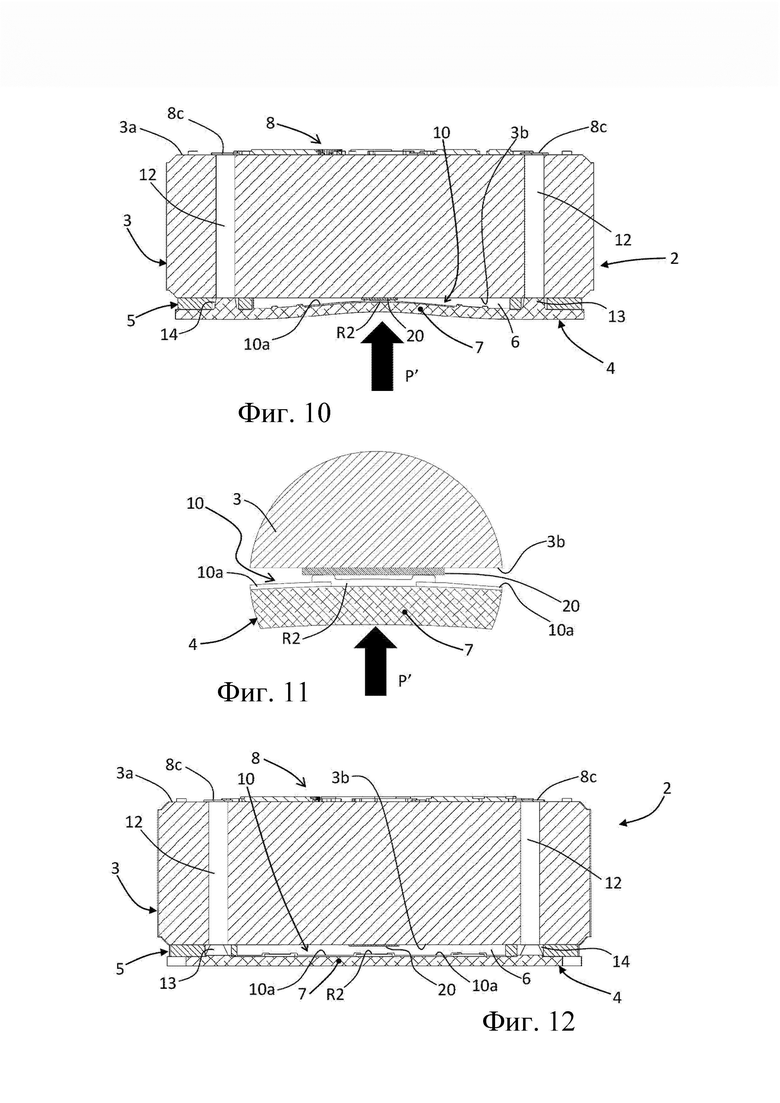
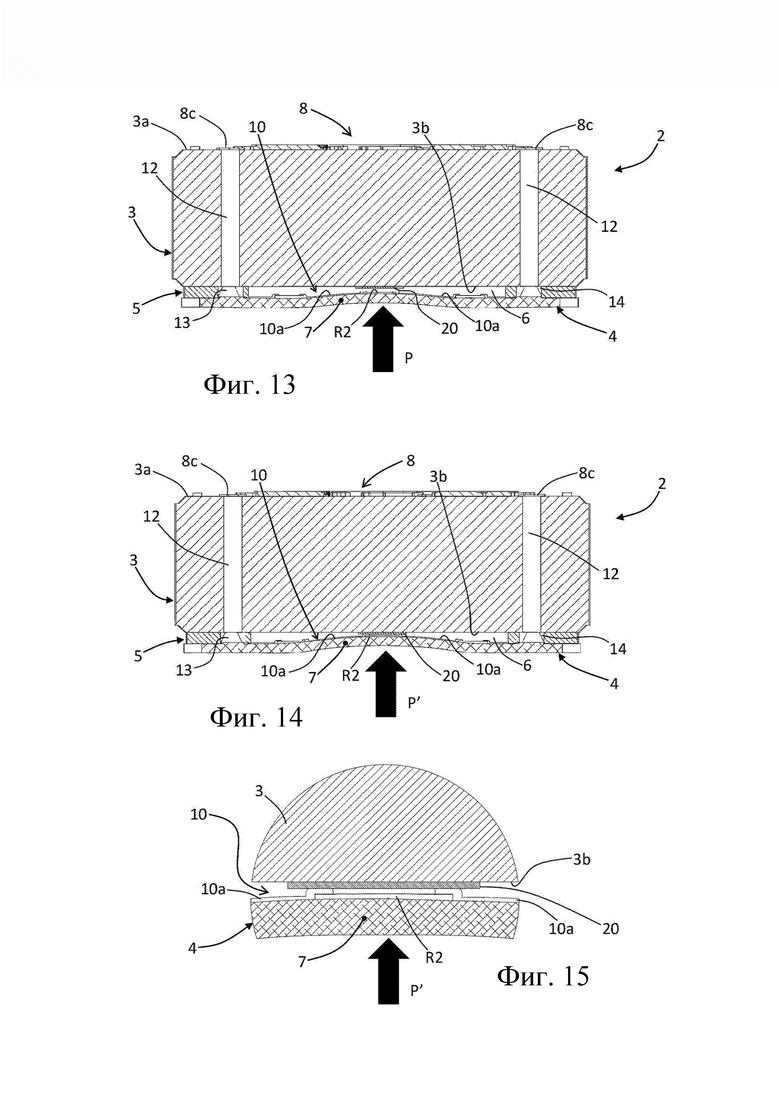
- фиг. 10 и 11 представляют собой виды, аналогичные показанным на фиг. 6-7 и 8-9, при этом датчик находится в третьем состоянии;
- фиг. 12, 13 и 14 представляют собой виды, аналогичные тем, которые показаны на фиг. 6, 8 и 10, соответственно, в отношении датчика в соответствии с дополнительными возможными вариантами осуществления изобретения;
- фиг. 15 иллюстрирует деталь в увеличенном масштабе с фиг. 14;
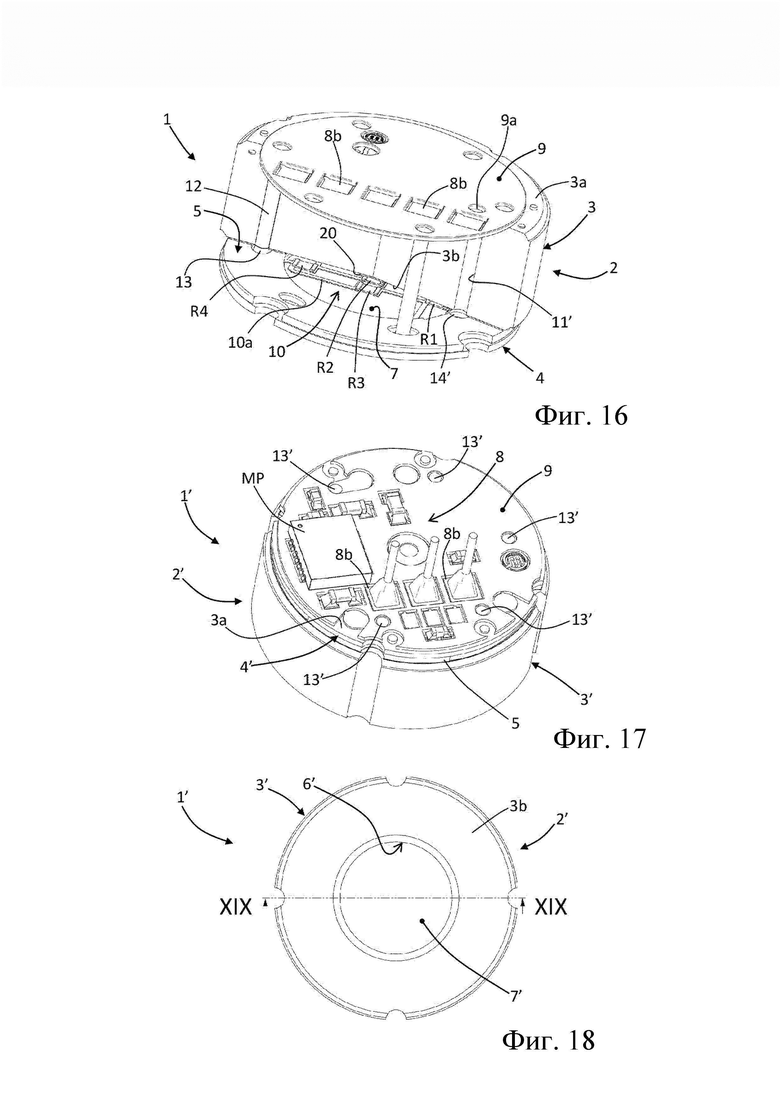
- фиг. 16 иллюстрирует схематический вид в аксонометрии и в частичном разрезе датчика в соответствии с дополнительными возможными вариантами осуществления изобретения;
- фиг. 17 и 18 представляют собой схематический вид в аксонометрии и схематический вид снизу, соответственно, датчика в соответствии с дополнительными возможными вариантами осуществления изобретения;
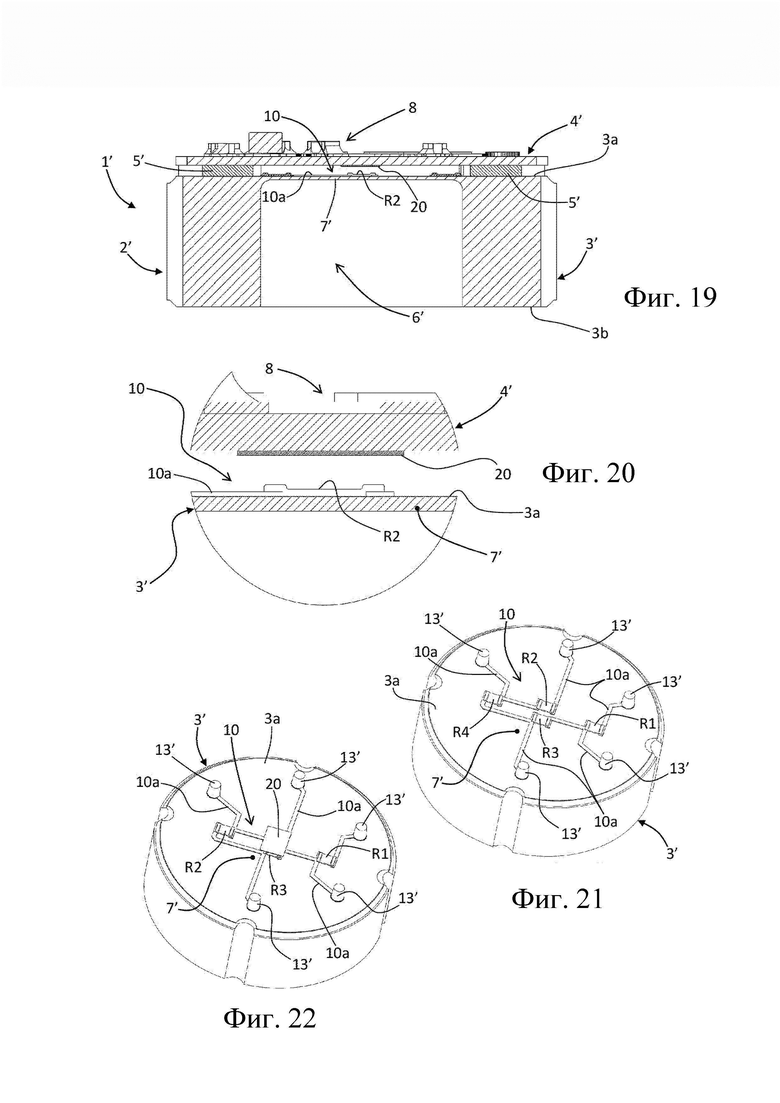
- фиг. 19 представляет собой схематический вид в поперечном сечении в соответствии с линией XIX-XIX с фиг. 18;
- фиг. 20 иллюстрирует деталь в увеличенном масштабе с фиг. 19;
- фиг. 21 и 22 иллюстрируют схематические виды в аксонометрии датчика с фиг. 17-18 с исключенными некоторыми частями;
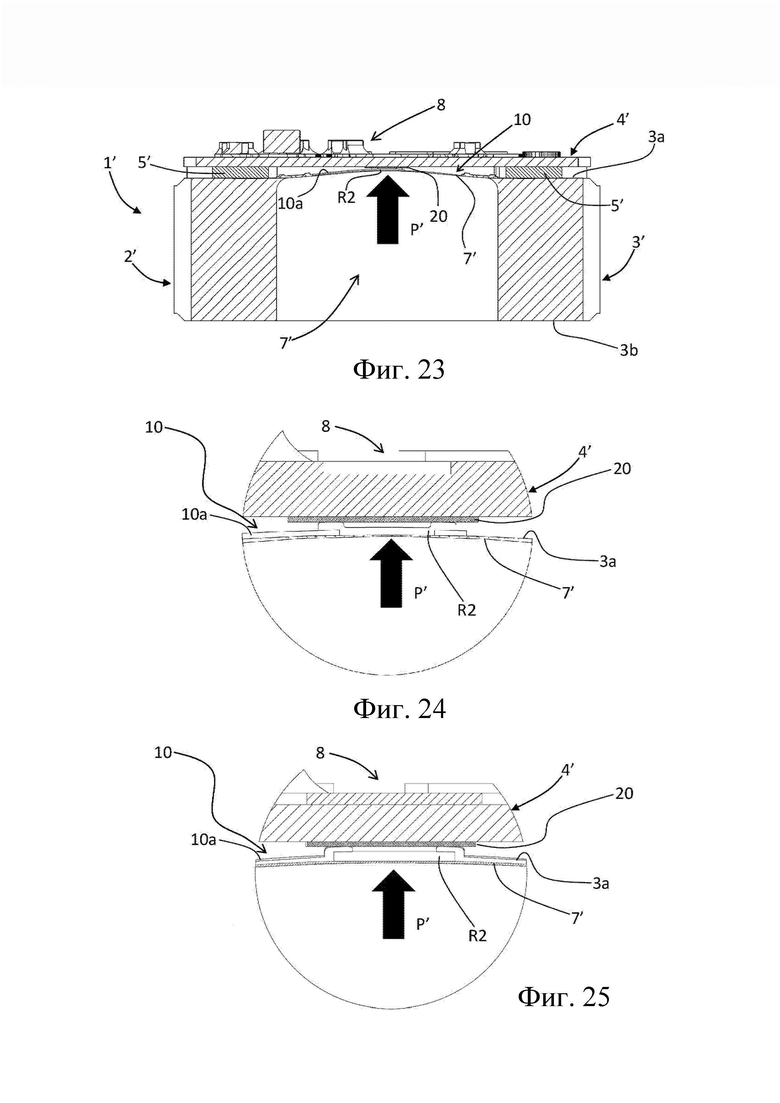
- фиг. 23 представляет собой схематический вид в поперечном сечении, аналогичный показанному на фиг. 19, причем датчик находится в другом состоянии;
- фиг. 20 иллюстрирует деталь в увеличенном масштабе с фиг. 19;
- фиг. 25 представляет собой вид, аналогичный представленному на фиг. 24, в отношении возможного варианта осуществления изобретения;
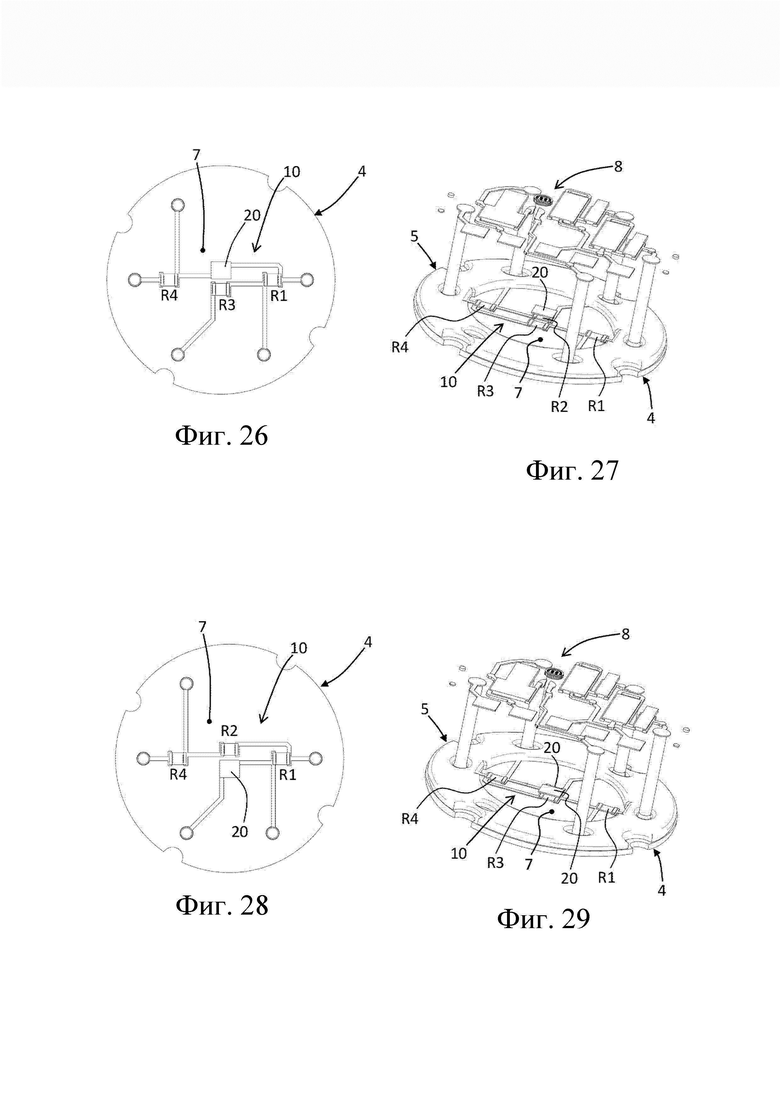
- фиг. 26 и 27 представляют собой схематический вид сверху и схематический вид в аксонометрии, соответственно, датчика в соответствии с возможными вариантами осуществления изобретения с исключенными некоторыми частями;
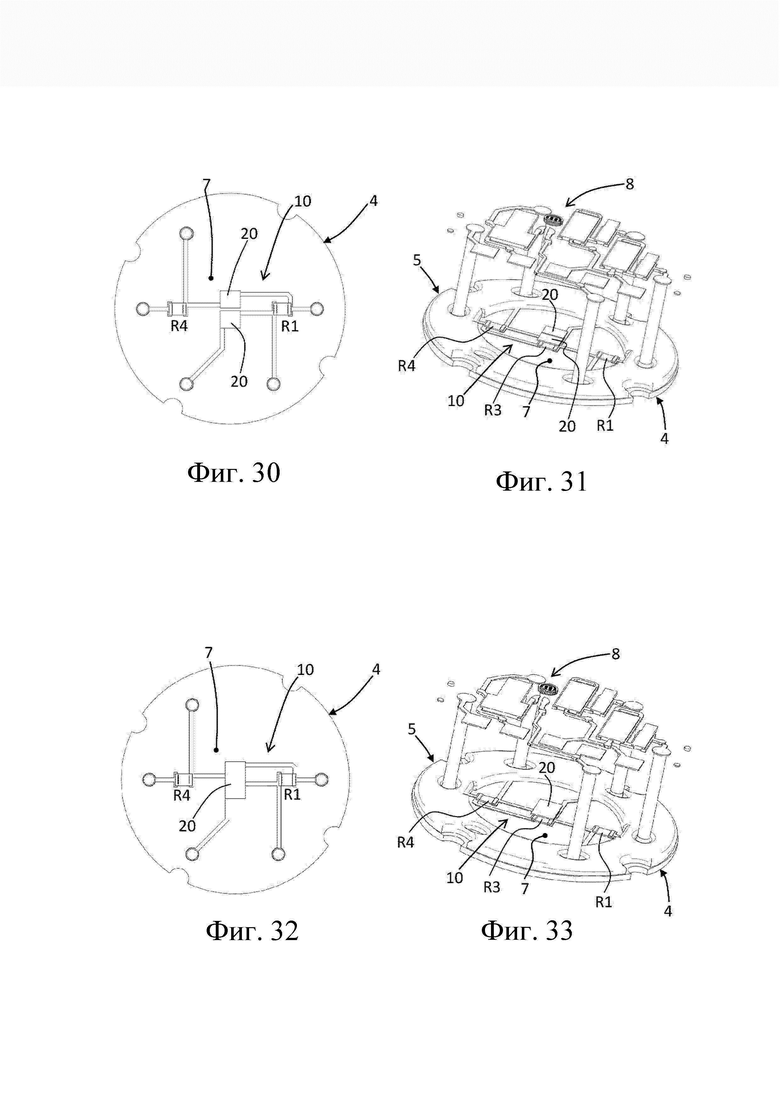
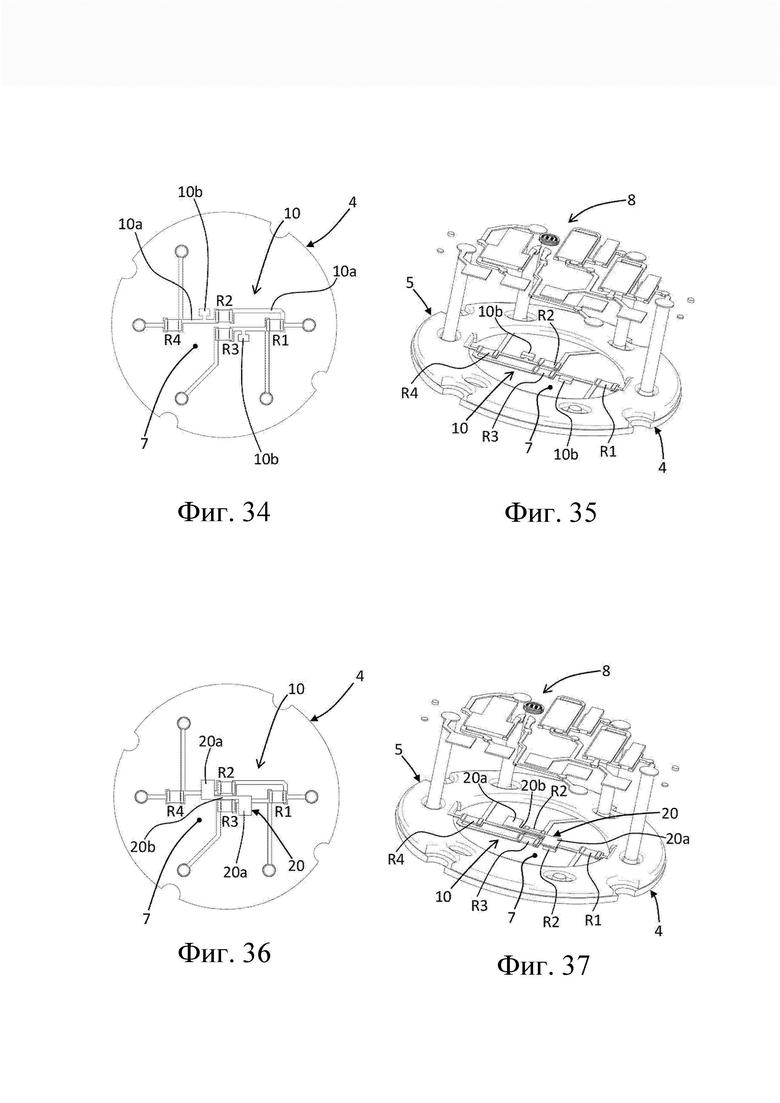
- фиг. 28-29, 30-31, 32-33, 34-35 и 36-37 представляют собой виды, аналогичные тем, которые показаны на фиг. 26-27, в отношении дополнительных возможных вариантов осуществления изобретения;
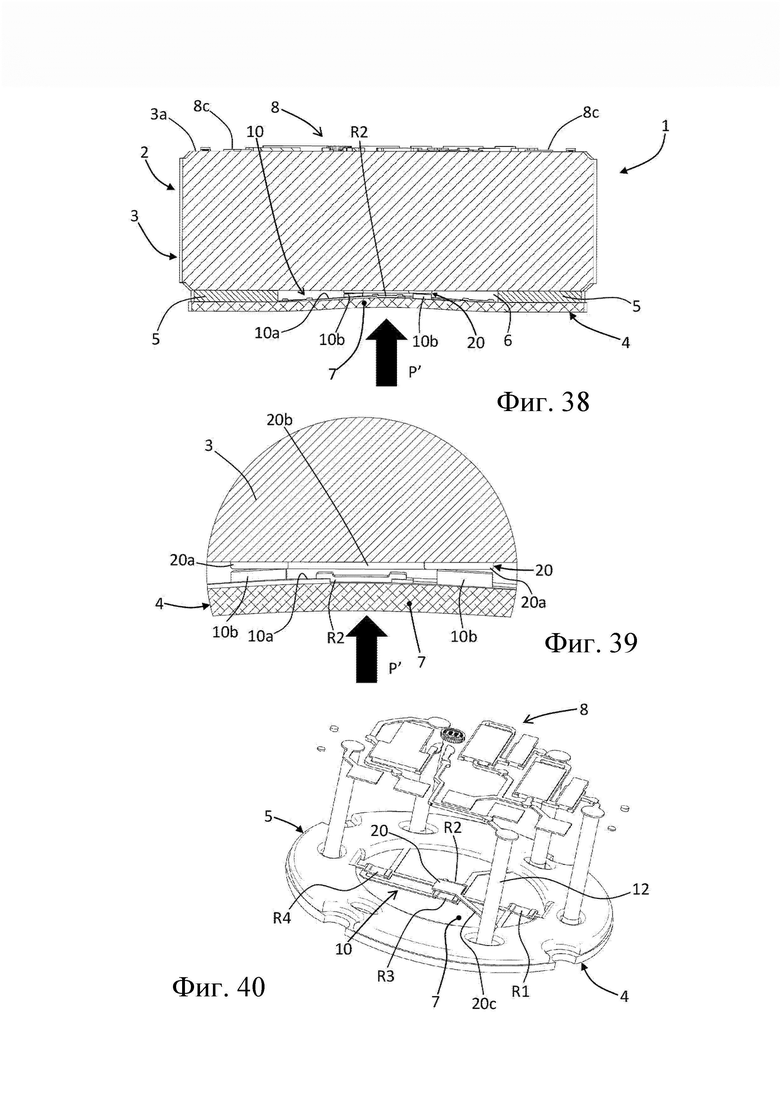
- фиг. 38 представляет собой схематический вид в поперечном сечении датчика в соответствии с вариантом осуществления изобретения, проиллюстрированным на фиг. 36-37;
- фиг. 39 иллюстрирует деталь в большем масштабе с фиг. 38;
- фиг. 40 представляет собой схематический вид в аксонометрии датчика в соответствии с возможными вариантами осуществления изобретения с исключением некоторых частей;
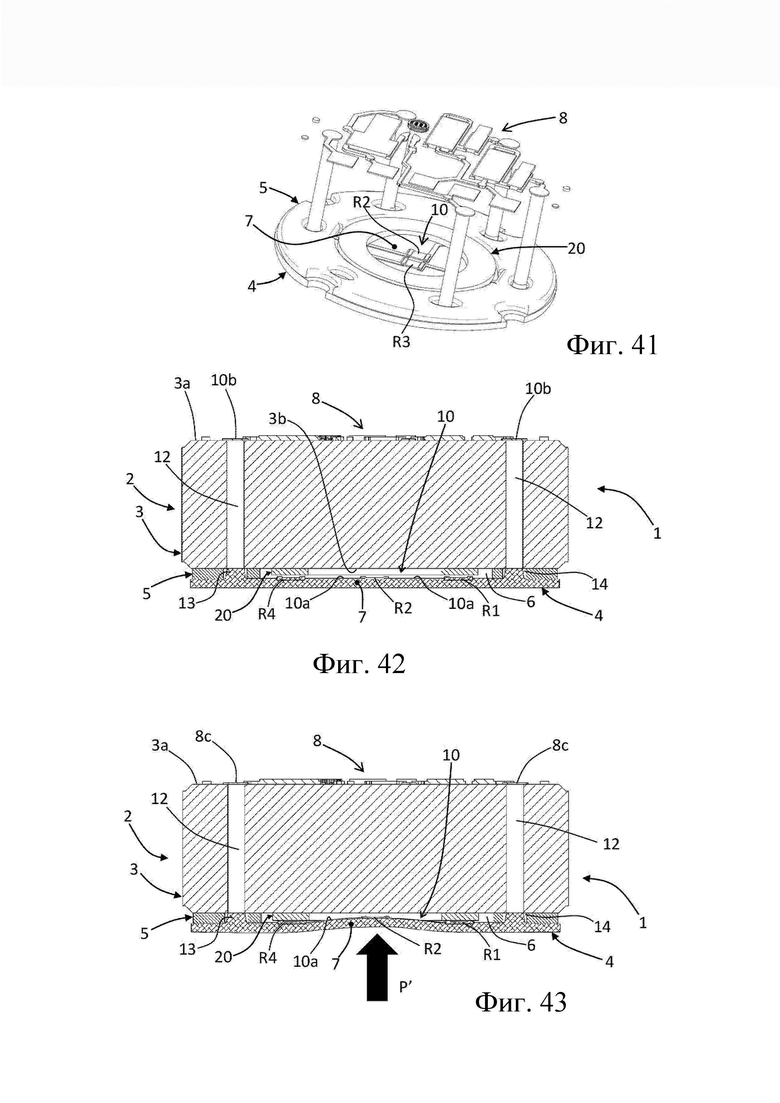
- фиг. 41 представляет собой схематический вид в аксонометрии датчика в соответствии с дополнительными возможными вариантами осуществления изобретения с исключением некоторых частей;
- фиг. 42 и 43 представляют собой схематические виды в поперечном сечении датчика в соответствии с вариантом осуществления изобретения, проиллюстрированным на фиг. 41, в двух различных состояниях;
- фиг. 20 иллюстрирует деталь в увеличенном масштабе с фиг. 19;
- фиг. 45 и 46 иллюстрируют схематические виды сверху датчика в соответствии с дополнительными возможными вариантами осуществления изобретения с исключением некоторых частей;
- фиг. 47 и 48 иллюстрируют виды, аналогичные показанным на фиг. 4 и 21, соответственно, в отношении возможных вариантов осуществления изобретения;
- фиг. 49 представляет собой схематический вид сверху части датчика в соответствии с дополнительными возможными вариантами осуществления изобретения;
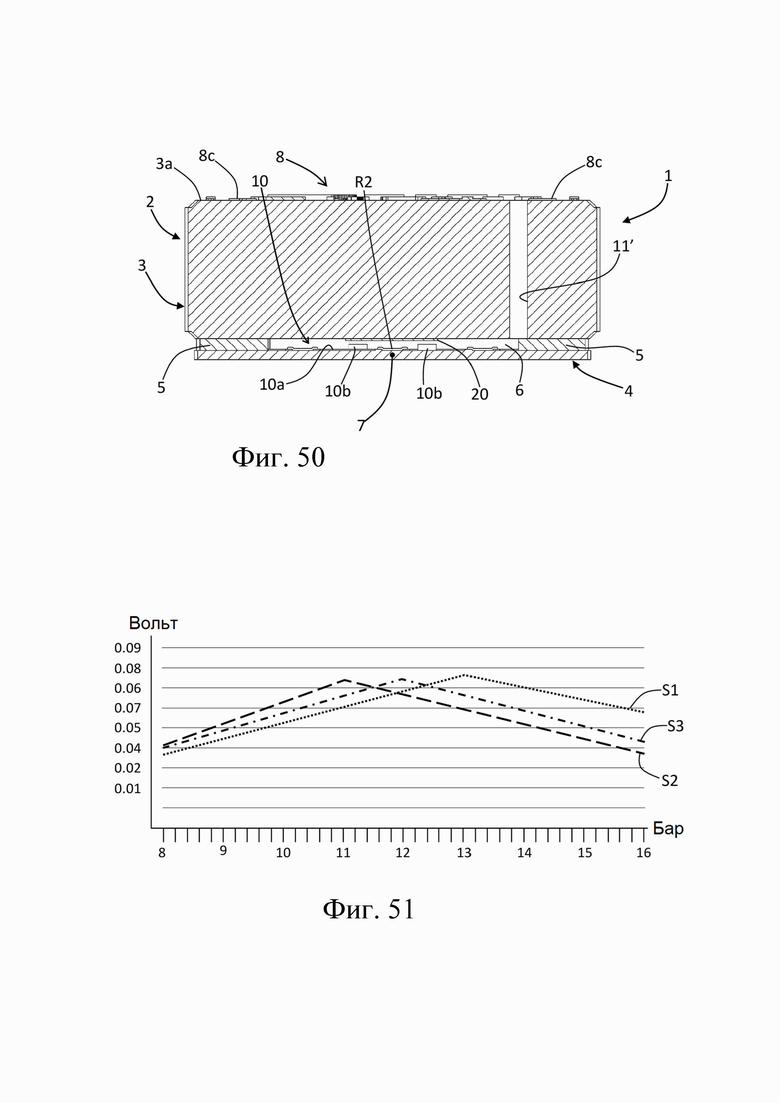
- фиг. 50 представляет собой схематический вид в поперечном сечении датчика, содержащего часть с фиг. 49; и
- фиг. 51 представляет собой схематическое графическое отображение, предназначенное для иллюстрации возможных ошибок детектирования давления датчиками в соответствии с предшествующим уровнем техники.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Ссылка на «вариант осуществления изобретения» или «один вариант осуществления изобретения» в рамках настоящего описания предназначена для указания на то, что конкретная конфигурация, структура или характеристика, описанная в отношении варианта осуществления изобретения, содержится по меньшей мере в одном варианте осуществления изобретения. Следовательно, фразы, такие как «в варианте осуществления изобретения», «в одном варианте осуществления изобретения» и тому подобное, которые могут присутствовать в различных пунктах настоящего описания, не обязательно относятся к одному и тому же варианту осуществления изобретения. Кроме того, конкретные формы, структуры или характеристики, определенные в рамках данного описания, могут быть объединены любым адекватным образом в одном или более вариантах осуществления изобретения, даже отличающихся от представленных вариантов осуществления изобретения. Ссылочные номера и пространственные ссылки (такие как «верхний», «нижний», «верхний», «нижний» и т. д.), используемые в данном документе, приведены только для удобства и, следовательно, не ограничивают объем защиты или объем вариантов осуществления изобретения. В настоящем описании и в прилагаемой формуле изобретения родовое понятие «материал» следует понимать как включающее смеси, композиции или комбинации ряда различных материалов (например, многослойные структуры или композитные материалы).
В целом, датчик давления согласно изобретению содержит корпус датчика с полостью, которая закрыта по меньшей мере на одном конце мембранной частью. Корпус датчика содержит по меньшей мере две части корпуса, по меньшей мере одна из которых определяет соответствующую мембранную часть, связанной с которой является цепь деформация-детектирование. Корпус датчика или каждая из по меньшей мере двух составляющих его частей корпуса предпочтительно изготовлены из электроизоляционного материала, такого как керамический материал, например оксид алюминия; с другой стороны, не исключено использование электропроводящего материала, например металла, для изготовления одной или более частей корпуса датчика, по меньшей мере частично покрытых электроизоляционным материалом.
В датчике первого типа согласно изобретению две части корпуса соединены друг с другом посредством дополнительного фиксирующего материала таким образом, что две части корпуса имеют соответствующие первые грани, обращенные друг к другу. Таким образом, указанные первые грани и фиксирующий материал ограничивают полость, высота которой зависит от толщины слоя фиксирующего материала. С внутренней стороной мембранной части, то есть ее первой гранью, обращенной внутрь полости, связана цепь деформации-детектирования, а ее внешняя сторона подвергается воздействию текучей среды. В датчиках этого типа одна из двух частей корпуса может также определять соответствующее углубление в своей первой грани, которое определяет по меньшей мере часть полости: следовательно, в таких вариантах датчиков глубина полости также зависит от глубины упомянутого выше углубления.
В датчиках упомянутого первого типа полость датчика корпуса может быть герметично закрыта посредством фиксирующего материала. С другой стороны, по существу аналогичная конструкция может быть использована также для обеспечения датчиков давления второго типа в соответствии с изобретением, где полость корпуса датчика сообщается по текучей среде с внешней средой, например, через сквозное отверстие одной из частей корпуса, в частности, части корпуса, отличной от той, которая определяет мембранную часть. Следовательно, сквозное отверстие обеспечивает канал, который, при необходимости, может быть использован для обеспечения эталонного давления на стороне мембранной части, внутренней по отношению к полости, относительно подлежащего измерению давления, которое действует на внешнюю сторону самой мембранной части. Это решение может быть принято, например, для выполнения детектирования перепада давления текучей среды, в частности, в отношении давления окружающей среды.
В датчиках давления третьего типа согласно изобретению одна из двух частей корпуса образует глухую осевую полость, то есть полость, закрытую на одном ее конце мембранной частью. Рассматриваемая часть корпуса предпочтительно имеет монолитный характер, хотя это и не является существенной характеристикой. Противоположный конец осевой полости, напротив, открыт, чтобы иметь возможность принимать текучую среду. В этих датчиках вторая часть корпуса прикреплена к первой части корпуса по существу на мембранной части, на расстоянии от нее, и поддерживает, например, устройство цепи. Кроме того, в этих случаях две части корпуса имеют соответствующие первые грани, обращенные друг к другу, к первой грани части корпуса, которая определяет мембранную часть, связанную с цепью обнаружения.
Датчик согласно изобретению в любом случае может быть получен в формах или версиях, отличных от приведенных выше.
Как было сказано, корпус датчика содержит по меньшей мере две части, прикрепленные друг к другу, которые, в свою очередь, могут быть монолитными или образованными множеством собранных компонентов. Например, со ссылкой на датчики третьего типа, упомянутые выше, часть корпуса, определяющая мембранную часть, может быть монолитной, чтобы определить как единую деталь также соответствующую глухую осевую полость; однако, указанная часть корпуса также может быть образована первым аксиально полым компонентом, то есть, имеющим сквозное отверстие, к торцу которого герметично прикреплен второй относительно тонкий компонент, который определяет мембранную часть и закрывает сквозное отверстие на одном конце.
На фиг. 1, цифрой 1 в целом обозначен датчик давления в соответствии с возможными вариантами осуществления настоящего изобретения, в частности, первого типа, упомянутого выше.
В приведенном в качестве примера варианте осуществления изобретения датчик 1 имеет корпус датчика, обозначенный в целом цифрой 2. В различных вариантах осуществления изобретения корпус 2 состоит из множества частей, содержащих по меньшей мере одну первую часть корпуса, обозначенную цифрой 3, и одну вторую часть корпуса, обозначенную цифрой 4. В представленном примере две части 3 и 4 герметично соединены друг с другом с помощью подходящих средств, в данном случае слоем фиксирующего материала 5, например, клея или спекаемого материала, так что первая грань (в данном случае нижняя грань) части 3 обращена к соответствующей первой грани (в данном случае верхней грани) части 4 на расстоянии от нее. Слой 5 имеет кольцевую форму и расположен между нижней гранью части 3 и верхней гранью части 4. Таким образом, между двумя частями 3, 4 корпуса определена полость или камера, в данном случае герметичного типа, обозначенная цифрой 6, например, на фиг. 6.
В различных вариантах осуществления изобретения часть 3 является по существу монолитной, даже если это не является существенным, и является относительно толстой, в то время как часть 4 является сравнительно более тонкой и определяет, по меньшей мере в своей центральной области, упруго деформируемую мембранную часть, обозначенную цифрой 7, например, на фиг. 3-6. Части 3 и 4 корпуса предпочтительно изготовлены из электроизоляционного материала, такого как керамический материал или тому подобное (например, оксид алюминия), или полимерного материала, но не исключен из объема настоящего изобретения и случай, когда одна или обе части 3 и 4 изготовлены из электропроводящего материала (например, металлического материала), покрытого, по меньшей мере частично, при необходимости, слоем электроизоляционного материала.
Часть 3 корпуса предпочтительно имеет в целом цилиндрическую форму с двумя противоположными гранями, обозначенными цифрами 3a и 3b, например, на фиг. 3, а также некоторыми периметральными опорными или позиционирующими гнездами, некоторые из которых обозначены только цифрой 3c на фиг. 1. В различных вариантах осуществления изобретения (не показаны) часть 3 корпуса может иметь иную форму, например, как правило, параллелепипедальную или в любом случае призматическую. Часть 4 корпуса предпочтительно имеет периферийный профиль, по существу совпадающий с профилем части 3, который в показанном примере является по существу круглым; в этом примере часть 4 имеет по существу форму диска, который обеспечивает по меньшей мере в своей центральной области упомянутую выше мембранную часть 7, которая подвержена упругому изгибу или деформации по направлению к части 3 корпуса, за счет текучей среды, давление подлежит детектированию.
Более толстая или жесткая часть 3 корпуса и более тонкая и по меньшей мере частично гибкая часть 4 корпуса могут иметь параллелепипедальную форму, то есть по существу квадратное или прямоугольное поперечное сечение; эти формы могут быть, например, получены путем разрезания множества корпусов 3 и 4 из листов больших размеров, которые соответственно являются более толстыми и более тонкими, предпочтительно путем разрезания корпусов 3 и 4 после того, как соответствующие листы были скреплены вместе.
Датчик 1 содержит устройство цепи, поддерживаемое корпусом 2 датчика, который - в различных предпочтительных вариантах осуществления - содержит по меньшей мере две части или цепи, каждая из которых поддерживается соответствующей частью 3 и 4 корпуса.
Как показано, в частности, на фиг. 2-4, в различных вариантах осуществления изобретения вышеупомянутое устройство цепи содержит электрическую цепь, связанную с верхней гранью 3a части 3 корпуса, обозначенную в целом цифрой 8. Цепь 8 содержит множество соответствующих дорожек из электропроводящего материала, некоторые из которых обозначены цифрой 8a на фиг. 2-5, и которые выполнены, например, из металла или металлического сплава (такого как сплав серебра и палладия), причем такие дорожки могут быть выполнены трафаретной печатью или в любом случае нанесены на грань 3a части 3 корпуса. В предпочтительном варианте осуществления изобретения, таким образом, электроизоляционный материал, составляющий часть 3, используется непосредственно в качестве подложки для по меньшей мере части устройства цепи; однако, как было указано выше, грань 3a также может быть электропроводящей, но покрытой, например, слоем электроизоляционного материала, с которым связана цепь 8.
Цепь 8 может содержать соответствующие компоненты цепи, например, компоненты, выполненные с возможностью обработки электрического сигнала, представляющего первую информацию в отношении значения давления, например, для его фильтрации, усиления, обработки и т.д. Кроме того, один или более из вышеуказанных компонентов могут быть непосредственно сформированы на грани 3a, например, резисторы, выполненные трафаретной печатью.
На фиг. 2 цифрой 8b обозначены некоторые соединительные площадки, которые попадают под соответствующие токопроводящие дорожки 8а цепи 8, и которые используются для подключения датчика 1 к общей внешней системе, например, электронному блоку управления двигателя внутреннего сгорания.
Следует отметить, что на фиг. 1 цепь 8 и соответствующие компоненты цепи по меньшей мере частично покрыты защитным слоем 9, выполненным из электроизоляционного материала, такого как слой полимерного или стекловидного материала, за исключением некоторых областей, в которых расположены площадки 8b (и возможные дополнительные части, которые не должны быть покрыты). Изображение слоя 9 опущено на других чертежах.
Устройство цепи датчика 1 в любом случае содержит электрическую цепь, обозначенную в целом цифрой 10 на фиг. 3 и 4, которая связана с верхней гранью части 4 корпуса, то есть в положении, обращенном к нижней грани 3b части 3 корпуса и на расстоянии от нее (см. фиг. 3). Как хорошо видно на фиг. 4 (где изображение части 3 корпуса было опущено для большей ясности), цепь 10 проходит по меньшей мере частично в положении, соответствующем мембранной части 7.
По меньшей мере часть цепи 10 выполнена с возможностью детектирования упругого изгиба или деформации мембранной части 7. Эта часть цепи может быть получена в соответствии с любым типом, известным в секторе, предпочтительно выбранным из цепей детектирования резистивного типа, цепей детектирования пьезоэлектрического типа, цепей детектирования пьезорезистивного типа.
Также цепь 10 предпочтительно содержит множество дорожек, выполненных из электропроводящего материала, например, металла или металлического сплава (такого как сплав серебро-палладий), некоторые из которых обозначены цифрой 10A на фиг. 3 и 4, предпочтительно нанесенных непосредственно (например, выполненных трафаретной печатью) на указанную верхнюю грань части 4 корпуса, а также один или более компонентов цепи детектирования, электрически соединенных с дорожками. Кроме того, один или более из компонентов детектирования могут быть непосредственно сформированы на указанной верхней грани части 4 корпуса, например, резисторов, или пьезоэлектрических элементов, или пьезорезистивных элементов, нанесенных посредством трафаретной печати или другого способа нанесения. Также в этом случае, как уже упоминалось, грань, рассматриваемая в части 4 корпуса, может быть выполнена из электропроводящего материала, например, металлического материала, но покрыта электроизоляционным материалом по меньшей мере на той части, на которой присутствует цепь 10.
В качестве примера предположим, что часть цепи 10, предназначенная для детектирования деформации мембранной части 7, имеет резистивный тип, в частности, пьезорезистивный тип, и что она содержит четыре резистора, в частности, пьезорезисторы, обозначенные R1, R2, R3 и R4, соединенные через дорожки 10A в конфигурации моста Уитстона, по меньшей мере с двумя резисторами (здесь два центральных резистора моста, обозначенные как R3 и R4), которые предпочтительно расположены в общем центральном положении мембранной части 7. Далее, четыре резистора R1, R2, R3 и R4 также будут обозначены в целом как R1, …, R4.
В рассматриваемом примере резисторы R1, …, R4, образующие часть резистивного детектирующего моста, следовательно, выполнены из резистивного или пьезорезистивного материала (например, резистивной или пьезорезистивной пасты), нанесенного на верхнюю грань части 4 корпуса, на мембранной части 7. Другая и подходящая конфигурация может быть принята, когда компоненты цепи для детектирования изгиба выполнены из пьезоэлектрического материала.
Две цепи 8 и 10 соединены между собой посредством подходящих электрических соединительных элементов, которые проходят в осевом направлении корпуса 2 датчика. В предпочтительном варианте осуществления средства, соединяющие две цепи 8 и 10, содержат по меньшей мере один электропроводящий материал, установленный во множестве сквозных отверстий в части 3 корпуса, которые проходят в осевом направлении между соответствующими гранями 3a и 3b. Два из таких отверстий обозначены цифрой 11 только на фиг. 3, тогда как обозначенные цифрой 12 представляет собой соответствующее заполнение, выполненное из электропроводящего материала (см. также фиг. 4). Следует отметить, что вместо наполнения электропроводящий материал 12, присутствующий в отверстиях 11, может состоять из слоя материала, который проходит по внутренней поверхности каждого отверстия 11 на всю его длину и/или поверхность до двух его концов. Независимо от конкретного используемого способа, материал 12 наносят преимущественно таким образом, чтобы часть металла или другого электропроводящего материала выступала на наружную грань отверстий 11 на соответствующих концах.
В представленном примере, как было указано выше, отверстия 11 заполнены электропроводящим материалом 12, например, проводящей пастой, для формирования электрических дорожек, имеющих по существу цилиндрическую форму. В качестве альтернативы, как указано выше, материал 12 может быть установлен в отверстиях 11, чтобы покрыть только цилиндрическую поверхность последних, не заполняя их, например, посредством процессов металлизации. В дополнение или в качестве альтернативы, соединительные слои или проводящие дорожки, которые выполняют описанные функции, могут быть предусмотрены по меньшей мере двумя осевыми канавками 3c части 3 корпуса (фиг. 1).
Как можно отметить, например, на фиг. 3 и 4, проводящий материал 12 каждого отверстия 11 электрически контактирует на верхней грани 3a части 3 с соответствующей клеммной площадкой 8c, соединенной с дорожкой 8a цепи 8. На нижней грани 3b части 3 корпуса материал 12, вместо этого, электрически соединен с цепью 10, например, с контактными формациями 13, выполненными из электропроводящего материала, полученного на верхней грани части 4 корпуса, причем эти формации 13 по существу аксиально выровнены с отверстиями 11 и проходят под соответствующими дорожками 10a цепи 10. Для обеспечения соединения между материалом 12 и формациями 13 слой 5 фиксирующего материала 5 снабжен соответствующими проходами или сквозными проемами, некоторые из которых обозначены цифрой 14. Формации 13 могут быть получены также после взаимного закрепления между частями 3 и 4 корпуса, например, путем использования отверстий 11 и введения в них электропроводящего материала, который создает такие формации 13.
В соответствии с одним из аспектов настоящего изобретения грань части 3 корпуса, которая расположена перед мембранной частью 7, образует или имеет связанный с ней по меньшей мере один дополнительный элемент цепи, выполненный с возможностью взаимодействия с электрической цепью, присутствующей на мембранной части, когда упругий изгиб или деформация последней по меньшей мере на степень, равную по существу предварительно заданному пределу, для получения второй информации, представляющей чрезмерное давление текучей среды, то есть чрезмерный изгиб мембранной части 7.
В различных вариантах осуществления указанный выше элемент цепи используется для получения сигнала или значения электрической величины, которые указывают на избыточное давление текучей среды и/или чрезмерный изгиб мембранной части 7.
В различных предпочтительных вариантах осуществления указанный выше элемент цепи выполнен с возможностью изменения выходного сигнала электрической цепи, который детектирует деформацию мембранной части таким образом, чтобы четко различимым и однозначным образом: таким образом, один и тот же выходной сигнал цепи детектирования, предназначенный для предоставления вышеуказанной первой информации о нормальном измерении давления, может быть использован для получения второй информации о состоянии избыточного давления текучей среды или, в противном случае, чрезмерной деформации мембраны. Рассматриваемый элемент цепи представляет собой компонент, функционально отличный от цепи детектирования; то есть, он не способствует эффективному измерению давления, а, напротив, конфигурирован для «возмущения» или изменения четко различимым образом выходного сигнала цепи детектирования в случае избыточного давления или аномального состояния датчика давления.
Тот факт, что один и тот же выходной сигнал цепи детектирования, в частности сигнал аналогового типа, может обеспечить как значение измерения, так и индикацию аномального состояния, представляет преимущество возможности предоставления множества информации, хотя и при наличии меньшего количества электрических соединений. Однако датчик согласно изобретению может быть снабжен соответствующей цепью для управления, обработки и передачи данных, например, в виде чипа, монтированного на корпусе датчика, для передачи, при необходимости, множества данных в цифровом формате (например, последовательных данных), которые также содержат информацию о значении измерения и аномальных условиях, или же цепь управления может осуществлять различение по одному сигналу измерения и состояния, разделяя его на два компонента (измерение давления и состояние аномалии), а затем подавать его отдельно на соответствующие электрические соединения во внешнюю пользовательскую цепь.
Предпочтительно, датчик 1 давления предварительно настроен для детектирования давлений текучей среды, содержащихся в номинальном рабочем диапазоне, между минимальным давлением и максимальным давлением, с электрической цепью для детектирования деформации мембраны, которая выполнена с возможностью подачи выходного сигнала, представляющего значение давления текучей среды. Выходной сигнал представлен электрической величиной, например, напряжением, которое может принимать значение, содержащееся в диапазоне номинальных значений, между минимальным значением и максимальным значением, которые соответствуют вышеуказанным минимальному и максимальному давлениям, соответственно. Таким образом, контакт между указанным элементом цепи и указанной частью электрической цепи детектирования определяет изменение выходного сигнала таким образом, что значение соответствующей электрической величины не входит в указанный диапазон номинальных значений.
В качестве конкретного примера, предположим, что датчик 1 должен работать в диапазоне номинального давления, составляющем от 8 бар до 13 бар, с электрическим значением на выходе из цепи, которое составляет от 0,035 В до 0,065 В, соответствуя минимальному значению (8 бар) и максимальному значению (13 бар) номинального рабочего диапазона датчика. Контакт между элементом цепи, предусмотренным в соответствии с изобретением, и соответствующей частью цепи детектирования определенно изменяет значение выходного напряжения, например, доводя его до 0,01 В, или в противном случае до 0,09 В, или в любом случае до значения напряжения, которое однозначно отличается от значений напряжения (например, от 0,03 до 0,07 В), которые генерируются, когда давление текучей среды находится в номинальном рабочем диапазоне 8-13 бар.
Со ссылкой на пример, описанный выше, указанный элемент цепи, обозначенный цифрой 20 на фиг. 3, связан с гранью 3b части 3 корпуса и предпочтительно состоит из электропроводящего элемента, причем это определение понимается как включающее также электрорезистивные элементы.
Как можно понять по фиг. 3, элемент 20, в частности, в форме контакта или пластины или площадки, соединен с гранью 3b части 3 корпуса таким образом, чтобы перекрывать по меньшей мере частично цепь 10 на расстоянии от нее. Элемент 20 может быть, например, приклеен к грани 3a, или получен посредством нанесения на грань электропроводящего материала (включая резистивный материал), например, путем трафаретной печати.
В различных вариантах осуществления изобретения элемент 20 цепи расположен в области грани 3b, по существу соответствующей центральной области мембранной части 7, даже если это не является существенной характеристикой. В случае, когда грань 3b не является плоской, элемент 20 может быть связан с частью в рельефе указанной грани. В случае, когда часть 3 корпуса не является монолитной, в частности, образованной рядом компонентов, собранных вместе, элемент 20 может быть связан с одним из таких компонентов, то есть расположен в положении, обычно обращенном к части 4 корпуса.
В различных вариантах осуществления изобретения, таких как рассматриваемый до настоящего времени, элемент 20 цепи расположен таким образом, чтобы контактировать с частью электрической цепи 10 после вышеупомянутого упругого изгиба или деформации мембранной части 7, имеющих степень, по меньшей мере равную вышеупомянутому по существу предварительно определенному пределу. В различных предпочтительных вариантах осуществления изобретения, в которых цепь детектирования содержит мост Уитстона, элемент 20 находится в положении, по существу соответствующем по меньшей мере одному из двух центральных резисторов R2, R3 моста, в частности, имеющему в качестве эталона осевое направление датчика.
Чтобы облегчить понимание работы элемента цепи 20, следует обратить внимание на фиг. 6-11.
Фиг. 6, на которой корпус 2 схематически представлен в поперечном разрезе, иллюстрирует нерабочее состояние или состояние покоя датчика, то есть состояние, при котором текучая среда не влияет на «внешнюю» сторону мембранной части 7 (то есть нижнюю грань части 4 корпуса), или в противном случае влияет на нее незначительным давлением, то есть давлением, недостаточным для определения заметной деформации части 7; давление текучей среды, следовательно, равно нулю или в любом случае ниже нижнего предела номинального рабочего диапазона датчика. Мембранная часть 7 находится по существу в состоянии покоя, например, по существу в плоскости и параллельно по отношению к нижней грани 3a части 3 корпуса, причем цепь 10 находится на расстоянии от грани 3a и от элемента 20, как можно также отметить по детали с фиг. 7. Как было ук азано выше, элемент цепи 20 перекрывает по меньшей мере часть цепи 10: предположим, например, что эта часть соответствует резистору R2.
Фиг. 8 иллюстрирует, напротив, рабочее состояние, в котором действующее на наружной стороне мембранной части 7 давление P текучей среды, которая находится в пределах номинального рабочего диапазона датчика, которое в данном случае опять же можно считать составляющим от 8 до 13 бар (очевидно, что рабочий диапазон может варьироваться в зависимости от класса датчика).
Давление P таково, что вызывает упругую деформацию мембранной части 7, которая изгибается по направлению к грани 3b, но не вступая в контакт с ней или с цепью 10, как можно также отметить на фиг. 9. Деформация мембранной части 7 вызывает деформацию также одного или более резисторов R1, …, R4 цепи детектирования, в частности, по меньшей мере резисторов R2 и R3, которые расположены в центральной области мембранной части 7: эта деформация вызывает изменение значения сопротивления R2 и R3, определяя последующее изменение выходного сигнала цепи детектирования R1, …, R4, предпочтительно сигнала напряжения.
Вышеуказанное изменение выходного сигнала, такое как изменение значения напряжения относительно значения покоя, генерируемого в состоянии, показанном на фиг. 6, является, следовательно, репрезентативным для давления P, генерируемого текучей средой. Сигнал достигает цепи 8 через средства соединения, представленные осевыми дорожками, образованными материалом 12, где он, возможно, обрабатывается и предоставляется во внешнюю систему через площадки 8b (фиг. 1).
Фиг. 10 иллюстрирует, напротив, аномальное состояние, при котором на внешней стороне мембранной части 7 действует избыточное давление P’ текучей среды, то есть давление, которое превышает номинальный рабочий диапазон датчика, например, давление 14 бар, со ссылкой на неограничивающий пример, упомянутый выше, который относится к рабочему диапазону, составляющему от 8 бар до 13 бар.
Как можно также отметить по фиг. 11, упругий изгиб мембранной части 7 является таким, что часть цепи 10 - здесь представленная резистором R2 - входит в контакт с элементом цепи 20.
Как было указано выше, в этом состоянии характеристический выходной сигнал цепи детектирования, в данном случае представленный мостиком Уитстона R1, …, R4, электрически модифицирован, причем изменение сигнала таково, что оно может быть детектировано однозначным и отличным образом от электрического сигнала, который, вместо этого, генерируется в условиях давления, которые находятся в пределах номинального рабочего диапазона датчика давления (то есть, когда давление, оказывающее воздействие на мембранную часть 7, таково, что не приводит к контакту между элементом 20 и цепью 10).
Предложенное решение основано на признании того факта, что в традиционном датчике, т.е., датчике без элемента цепи 20, выходной сигнал цепи детектирования имеет по существу определенную характеристическую диаграмму в номинальном рабочем диапазоне (например, он изменяется линейно или в соответствии по существу с заранее определенной кривой), и что - когда в результате избыточного давления - мембранная часть вступает в контакт с вышележащей частью корпуса датчика, этот сигнал отклоняется от характеристической диаграммы, что приводит к возможным ошибкам детектирования.
Чтобы лучше прояснить эту концепцию, можно сослаться на фиг. 51, где упрощенно представлено поведение трех традиционных датчиков давления, имеющих структуру, аналогичную той, которая была описана выше, но без элемента цепи 20. График на фиг. 51 представляет значение, выраженное в вольтах выходных сигналов трех датчиков, обозначенных S1, S2 и S3, как функции давления, выраженного в барах. Предположим, для простоты, что номинальный рабочий диапазон трех датчиков составляет от 8 до 11 бар (сигнал S1), от 8 до 12 бар (сигнал S2) и от 8 до 13 бар (сигнал S3), соответственно.
Как можно отметить, выходные сигналы S1, S2 и S3 являются по существу монотонными и линейными в номинальном рабочем диапазоне трех датчиков. Вместо этого, начиная с давления, по меньшей мере равного 11,1 бар, 12,1 бар и 13,1 бар, соответствующего контакту между мембранной частью датчика и вышележащей частью корпуса датчика, выходной сигнал начинает уменьшаться. Эта вариация поведения в основном обусловлена тем, что по мере увеличения деформации мембранной части и увеличения ее площади контакта с вышележащей частью корпуса центральные резисторы измерительного моста изгибаются в противоположном направлении (из по существу вогнутой конфигурации они, как правило, принимают по существу выпуклую конфигурацию), вследствие чего значение выходного сигнала вместо дальнейшего увеличения начинает постепенно уменьшаться. Следовательно, следует понимать, что к одному и тому же значению выходного сигнала могут соответствовать два значения давления, которые явно отличаются друг от друга. См., например, значение сигналов, соответствующих выходному напряжению 0,07 В, где:
- в случае сигнала S1 этому значению может соответствовать давление приблизительно 11 бар или приблизительно 15,8 бар,
- в случае сигнала S2 этому значению может соответствовать давление приблизительно 9,8 бар или 12,8 бар; и
- в случае сигнала S3 этому значению может соответствовать давление приблизительно 10,4 бар или 13,8 бар,
Очевидно, что такое поведение может приводить к значительным ошибкам в детектировании давления.
Решение согласно изобретению позволяет точно различать, когда давление детектируемой текучей среды превышает верхний предел номинального рабочего диапазона датчика.
Чтобы вернуться к проиллюстрированному выше примеру (см., в частности, фиг. 11), элемент цепи 20 может быть выполнен из резистивного материала (или, в качестве альтернативы, из металлического элемента или высокопроводящего материала) и выполнен с возможностью прямого контакта с одним из резисторов R1, …, R4, в данном случае с резистором R2. Специалисту понятно, что после контакта между элементом цепи 20 и резистором R2 общее значение сопротивления моста R1, …, R4 радикально изменяется относительно нормальных условий работы (давления в номинальном диапазоне), например, уменьшается. Выходное напряжение цепи 10 изменяется соответствующим образом, так что оно может быть легко различено управляющей электроникой, например, электроникой, реализованной на цепи 8, или, в ином случае, электроникой, реализованной во внешней системе, к которой подключен датчик 1.
В случае, показанном на фиг. 6-11, резисторы R1, …, R4 или, по меньшей мере, один из них, проходят по меньшей мере частично над оконечностями соответствующих соединительных дорожек 10A, как можно четко заметить, например, на фиг. 7, 9 и 11. Таким образом, элемент 20 может вступать в прямой контакт с рассматриваемым сопротивлением после чрезмерной деформации мембранной части 7.
Однако в других вариантах осуществления изобретения также возможно обратное расположение, то есть с концами проводящих дорожек 10A, которые проходят по меньшей мере частично над резисторами R1, …, R4 или по меньшей мере над одним из них. Такой случай проиллюстрирован на фиг. 12-15, по которых можно отметить - в частности, по фиг. 15 - как в этом случае элемент цепи 20 входит в контакт с оконечностями дорожек, обозначенных цифрой 10A, для соединения резистора R2. В этом случае, например, элемент цепи 20 может быть металлическим элементом, который является практически полностью проводящим, или с очень низким электрическим сопротивлением, так чтобы замкнуть накоротко две дорожки 10A (также в этом примере, с другой стороны, элемент цепи 20 может быть выполнен из резистивного материала). В этом случае после контакта из-за чрезмерной деформации мембранной части, то есть из-за избыточного давления P’ текучей среды, общее значение сопротивления моста R1, …, R4 радикально изменяется относительно нормальных условий работы (давления в номинальном диапазоне), например, уменьшаясь, в то время как выходное напряжение цепи 10 изменяется соответственно, в частности, превышая максимально допустимое значение напряжения, когда датчик работает в номинальном диапазоне давления, предусмотренном для применения датчика 1.
На фиг. 16 показан другой датчик давления в соответствии с настоящим изобретением, по существу второго типа, упомянутого ранее. В примере датчик 1 имеет общую структуру, которая по существу аналогична структуре датчика с фиг. 1, но в которой полость или камера, ограниченная частями 3, 4 корпуса и слоем 5 фиксирующего материала, сообщена с внешней средой. Для этого в случае, показанном на фиг. 16, корпусная часть 3 имеет проход 11’, выполненный в данном случае в виде отверстий 11, предназначенных для соединения полости или камеры с внешней средой (см. также фиг. 50). Для этой цели предпочтительно также слой фиксирующего материала 5 будет расположен, по меньшей мере, на нижнем конце отверстия 11’, чтобы обеспечить его сообщение с полостью или камерой, определенной между частями 3, 4 и слоем 5. Разумеется, также возможный защитный слой 9, расположенный на верхней грани 3a части 3 корпуса, будет сформирован таким образом, чтобы обеспечить соединение верхнего конца отверстия 11’ с внешней средой: в примере, для этой цели, слой 9 имеет проход или проем 9a на верхнем конце отверстия 11’.
Фиг. 17-25 иллюстрируют дополнительные возможные варианты осуществления изобретения, в частности, в отношении датчика давления вышеупомянутого третьего типа, обозначенного в целом цифрой 1’, имеющего часть корпуса, которая определяет соответствующую полость.
Как показано, в частности, на фиг. 17-19, в этом случае более толстая часть 3’ корпуса датчика 2’ определяет глухую осевую полость, обозначенную цифрой 6’ на фиг. 18-19, которая закрыта на верхнем конце соответствующей мембранной частью 7’, предпочтительно определенной как единое целое с частью корпуса 3’, например, из керамического материала, такого как оксид алюминия. Как можно отметить, в частности, на фиг. 19, полость 6’ вместо этого открыта на своем нижнем конце, то есть на нижней грани 3b части 3’, так что она может принимать в себя текучую среду, подлежащую детектированию.
На верхней грани 3a части 3’ корпуса установлена вторая часть 4’ корпуса, которая тоньше, чем часть 3’ корпуса (за исключением мембранной части 7’), и предпочтительно является относительно жесткой, например, в виде печатной платы или плоской опоры. На верхней грани корпусной части 4’ выполнена цепь 8, которая - в случае фиг. 17 - частично покрыта соответствующим защитным слоем 9.
Части 3’ и 4’ корпуса соединены друг с другом таким образом, что первая грань части 3’ корпуса (здесь верхняя грань 3a) или, в любом случае, ее мембранная часть 7’ обращена к соответствующей первой грани (здесь нижняя грань) части 4’ корпуса на расстоянии от нее, как это четко показано на фиг. 19 и 20. Также в этом случае цепь 10 расположена по меньшей мере частично в области, соответствующей мембранной части 7’, например, с модальностями, аналогичными тем, которые уже приведены в качестве примера выше.
Также в этом случае средства для соединения частей 3’ и 4’ корпуса вместе могут содержать слой фиксирующего материала 5’, расположенный между рассматриваемыми частями, например, клей или спекаемый материал. Однако следует отметить, что в данной заявке нет необходимости для слоя 5’ герметично уплотнять вместе две части 3’ и 4’, при этом наличие закрытой камеры между ними не является существенным.
Фиг. 21 иллюстрирует только часть 3’ корпуса с соответствующей цепью 10, которая, как указано выше, может быть выполнена такой же, как уже описанная выше. В приведенном в качестве примера случае проводящие дорожки 10a цепи 10 проходят под соответствующими электрическими соединительными формациями 13’, например, аналогичными тем, которые обозначены выше цифрой 13, и которые могут быть нанесены на верхнюю грань 3a и подниматься от нее в осевом направлении. Такие формации 13’ могут быть преимущественно использованы для соединения цепи 10 с цепью 8. Для этой цели, например, часть 4’ корпуса может быть снабжена сквозными отверстиями в положениях, соответствующих формациям 13’, так что последние по меньшей мере частично проникают в вышеупомянутые отверстия, как можно понять, например, по фиг. 17. Вышеупомянутые отверстия могут быть снабжены поверхностной металлизацией, соединенной с соответствующими проводящими дорожками цепи 8; в качестве альтернативы, вышеупомянутые проводящие дорожки могут быть соединены с формациями 13’ посредством нанесенного сварочного материала.
Фиг. 22 аналогична фиг. 21, но дополнительно иллюстрирует элемент 20 цепи, который в различных вариантах осуществления изобретения выполнен с возможностью контакта с двумя компонентами детектирования цепи, представленными в данном документе центральными резисторами R2 и R3. Как можно видеть на фиг. 19 и 20, в этом случае элемент 20 расположен на нижней грани части 4’ корпуса, также в этом случае предпочтительно в положении, соответствующем центральной области мембранной части 7’.
Как можно понять по фиг. 23-24, принцип работы датчика 1’ аналогичен тому, что уже было описано выше. Кроме того, в этом случае, по существу, превышение давления P’ относительно номинального рабочего диапазона датчика 1’ вызывает чрезмерную деформацию мембранной части 7’, что приводит к контакту по меньшей мере между одной части цепи - здесь представлено резистором R2-R3 - с проводящим элементом цепи 20, удерживаемым частью 4’ корпуса, как показано на фиг. 24. Этот контакт, независимо от типа электропроводящего материала, который образует элемент 20 (резистивный материал или в противном случае высокопроводящий материал), вызывает резкое изменение выходного сигнала измерительного моста R1, …, R4, который может быть четко различен управляющей электроникой, то есть указывает на превышение давления по отношению к номинальному диапазону.
В случае фиг. 17-24, сопротивления R1, …, R4 проходят по меньшей мере частично над соответствующими выводами соединительных дорожек 10A, но, конечно, также возможна противоположная конфигурация, типа, уже описанного выше, как показано на фиг. 25, где выводы соединительных дорожек 10A проходят по меньшей мере частично над резисторами R1, …, R4.
Фиг. 26-27, 28-29, 30-31 и 32-33 иллюстрируют лишь в качестве примера некоторые из возможных альтернативных конфигураций элементов цепи 20. На фиг. 26-27 проиллюстрирован описанный выше случай элемента 20, выполненного с возможностью контакта с резистором R2, по существу, замыкания его или соединения резистора, полученного элементом 20, параллельно резистору R2 (следовательно, уменьшение значения резистора R2), тогда как на фиг. 28-29 проиллюстрирован аналогичный случай по отношению к резистору R3.
Фиг. 30-31 иллюстрируют случай двух отдельных элементов 20 цепи, предназначенных для контакта с двумя резисторами R2 и R3, отдельно друг от друга, чтобы закоротить их или уменьшить их значение сопротивления.
Фиг. 32-33 иллюстрируют, вместо этого, уже упомянутый случай одного элемента 20, который вступает в контакт одновременно с резисторами R2 и R3, в частности, для обеспечения уменьшения сопротивления или короткого замыкания как значения отдельных резисторов, так и между резисторами R2 и R3, то есть короткого замыкания между частями соответствующего измерительного моста, с большим изменением сигнала.
В различных вариантах осуществления изобретения элемент 20 цепи и цепь 10 могут быть предварительно расположены таким образом, чтобы вступать в взаимный контакт в положениях, отличных от по меньшей мере одного компонента детектирования цепи 10. Например, со ссылкой на фиг. 34-35, две разные проводящие дорожки 10A цепи 10 (в данном случае две проводящие дорожки, которые попадают под резисторы R2 и R3, соответственно) сформированы таким образом, чтобы представить две соответствующие площадки 10b. С другой стороны, фиг. 36-37 иллюстрируют возможную конформацию элемента цепи 20, который выполнен с возможностью контакта с вышеупомянутыми двумя пластинами 10b и их короткого замыкания - или соединения их вместе с резистором, полученным самим элементом 20, - не вступая, однако, в контакт с резисторами R2 и R3. В примере этот контактный элемент содержит две концевые части 20A в положениях, соответствующих площадкам 10b, соединенным между собой посредством промежуточной части 20b, расположенной в положении, соответствующем пространству, которое отделяет резисторы R2 и R3 друг от друга. Таким образом, как показано на последующих фиг. 38-39, при наличии избыточного давления P’ текучей среды, т. е. давления, превышающего номинальный рабочий диапазон датчика 1, площадки 10b вступают в контакт с частями 20a элемента 20, тогда как его промежуточная часть 20b не касается резисторов R2 и R3. Для этой цели предпочтительно, чтобы верхняя часть площадок 10b была расположена на большей высоте, чем резисторы R2 и R3. Также в этом случае элемент 20 может содержать резистивный материал для определения сопротивления, или в противном случае может содержать металлический материал или высокопроводящий материал для определения элемента короткого замыкания или моста. Кроме того, в таком варианте осуществления конечным результатом является уже описанный выше результат, заключающийся в изменении, которое может быть различено по выходному сигналу цепи 10.
Элемент цепи 20 также может быть электрически соединен с одной или более ветвями измерительного моста R1, …, R4. Такой случай показан на фиг. 40, где под элементом 20 проходит соответствующая электропроводящая дорожка 20C, которая также расположена на грани части корпуса датчика (здесь не показана), обращенной к мембранной части 7, на расстоянии от нее. Другой конец дорожки 20с соединен с одной из ветвей моста R1, …, R4, например, через одну из металлизаций 12, используемых для соединения цепи 10 с цепью 8. Следует понимать, что также в таком варианте осуществления конечный эффект контакта между элементом 20 и цепью 10, например, в положении, соответствующем резистору R2, приведет к резкому изменению выходного сигнала моста R1, …, R4, который может быть распознан управляющей электроникой как представляющий избыточное давление текучей среды.
Хотя предпочтительно, элемент цепи 20 не обязательно должен находиться в положении, по существу соответствующем одному или более центральным компонентам детектирования цепи 10, таким как резисторы R2 и R3. Элемент 20 фактически может быть установлен таким образом, чтобы взаимодействовать с одним или обоими другими резисторами R1 и R4.
Такой случай проиллюстрирован на фиг. 41, где элемент цепи 20 имеет по существу кольцевую форму и расположен таким образом, что он может контактировать с резисторами R1 и R4 (то есть, с окончаниями соответствующих проводящих дорожек 10A), следуя за избыточным давлением текучей среды, как уже объяснялось выше. Элемент цепи 20 может, однако, обеспечивать контакт даже с одним из резисторов R1, R4, или в любом случае иметь какую-либо другую форму, предназначенную для обеспечения контакта с обоими из резисторов R1 и R4 (например, полукруглую форму или форму, содержащую две прокладки, соединенные между собой по меньшей мере одной проводящей дорожкой).
Предпочтительно, в этом случае толщина элемента 20 сравнительно больше, чем в случаях, приведенных выше. С другой стороны, элемент 20 может быть установлен на участке с рельефом соответствующей грани части 3 корпуса, то есть в его плоскости, которая находится ближе к мембране 7.
Как можно видеть на фиг. 42, в отсутствие давления текучей среды мембранная часть 7 является по существу плоской или в состоянии покоя, и, следовательно, со всеми резисторами R1, …, R4 (или соответствующими окончаниями соответствующих соединительных дорожек 10A) на расстоянии от элемента 20. Настройка давления текучей среды, которая находится в номинальном рабочем диапазоне датчика 1, приводит, как описано ранее, к деформации мембранной части 7 такой степени, чтобы не вызывать контакт между резисторами R1 и R4 и элементом 20.
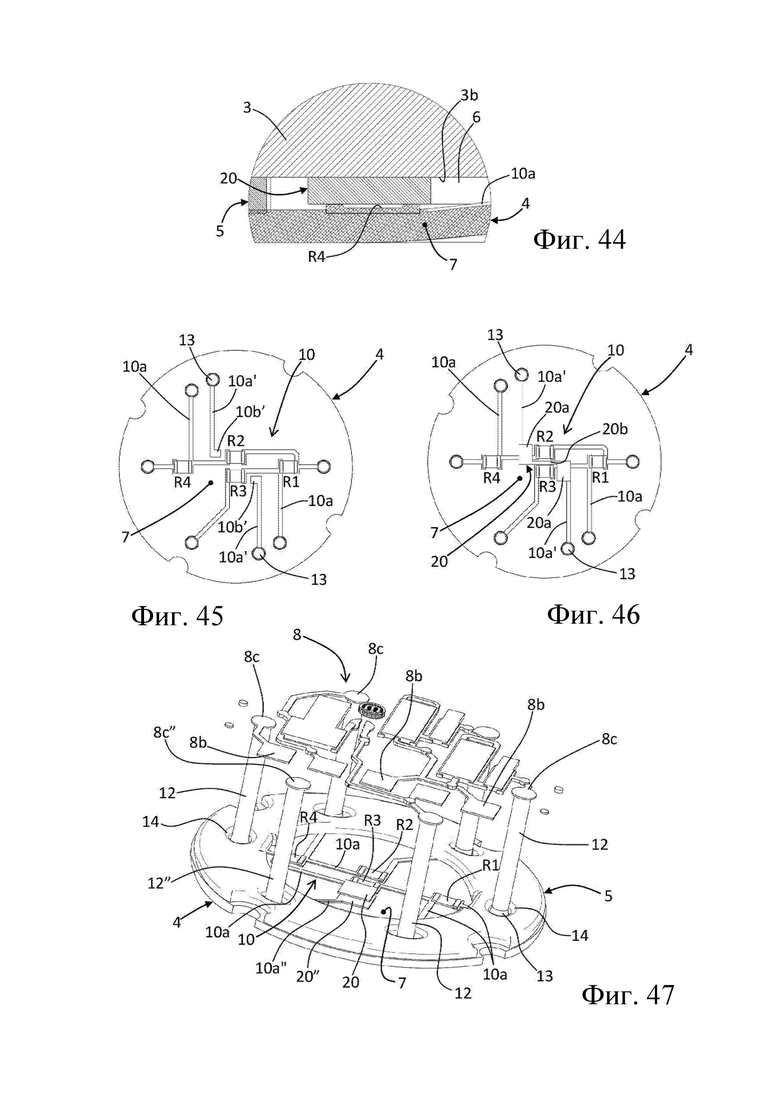
Вместо этого, когда давление P’, приложенное к мембранной части 7, превышает номинальное давление датчика, в любом случае возникает избыток деформации указанной части 7 в направлении вышележащей части 3 корпуса. Центральная область мембранной части 7 свободно подвергается деформации по направлению к корпусной части 3 благодаря наличию центрального прохода элемента 20. Мембранная часть 7 также подвергается деформации в своей периферийной области, соответствующей резисторам R1 и R4, так что последние поднимаются. Таким образом, происходит контакт между резисторами R1 и R4 и кольцеобразным элементом 20, как схематически проиллюстрировано на фиг. 43 и выделено на фиг. 44 со ссылкой на резистор R4. Также в этом случае, следовательно, происходит резкое изменение выходного сигнала цепи 10, которое может быть распознано и может быть детектировано управляющей электроникой.
Следует отметить, что в других вариантах осуществления изобретения, которые не представлены, элемент цепи 20 может иметь такую форму и быть расположен таким образом, чтобы иметь возможность контактировать или взаимодействовать со всеми резисторами R1, R2, R3, R4 или с другой комбинацией по меньшей мере некоторых резисторов (например, R1 и R2, или R1 и R3, или R2 и R4, или R3 и R4).
Таким образом, как проиллюстрировано, элемент 20 может быть электрически резистивным элементом, выполненным с возможностью обеспечения электрического резистора, который должен соприкасаться и, следовательно, электрически соединяться, по меньшей мере, с частью цепи 10, например, обеспечивая соединение параллельно по меньшей мере одному электрическому резистору R1, …, R4 цепи детектирования, или обеспечивая соединение между множеством электрических резисторов R1, …, R4 цепи детектирования, или соединение между соединительными дорожками 10A компонента детектирования R1, …, R4, принадлежащего цепи детектирования. В качестве альтернативы, как указано выше, элемент 20 может, однако, также быть металлическим элементом или высокопроводящим элементом, который обеспечивает короткозамыкающий элемент, предназначенный для установки в контакт и, следовательно, электрически соединенный по меньшей мере с частью цепи 10, такой как соединение короткого замыкания по меньшей мере через один электрический резистор R1, …, R4 цепи детектирования или соединение короткого замыкания между множеством электрических резисторов R1, …, R4 цепи детектирования, или соединение короткого замыкания между соединительными дорожками 10a компонента детектирования R1, …, R4, принадлежащего цепи детектирования.
Из вышеизложенного описания четко вытекают характеристики настоящего изобретения, а также его преимущества.
Датчик согласно изобретению снабжен средствами, предназначенными для детектирования и/или сигнализации (предупреждения) контакта его мембранной части с другой частью корпуса датчика или чрезмерного сближения с ней. Это детектирование или сигнализация (предупреждение) может быть получено посредством заранее определенного изменения выходного сигнала измерительной цепи, которая отвечает за детектирование деформации мембранной части, для целей детектирования давления. С другой стороны, как было показано, согласно изобретению также можно предусмотреть, помимо указанной выше измерительной цепи, вторую электрическую или электронную цепь, предназначенную для детектирования контакта мембранной части с другой неподвижной частью корпуса датчика или чрезмерного сближения с ней, даже при отсутствии прямого контакта. Предложенное решение позволяет простым, недорогим и надежным способом предотвратить любые риски ошибочных детектирований, когда деформация мембранной части датчика превышает допустимую в номинальном рабочем диапазоне датчика.
Понятно, что специалист в данной области техники может внести многочисленные изменения в датчик давления, описанный в качестве примера, без выхода при этом за рамки объема правовой охраны изобретения, определенного в прилагаемой формуле изобретения.
Цепь 10 может быть выполнена с возможностью подачи сигнала безопасности или неисправности, то есть сигнала, указывающего на превышение давления, который является дополнительным и независимым от выходного сигнала измерительного моста R1, …, R4.
Например, цепь 10 может представлять собой специальные прокладки, которые должны быть закорочены или в любом случае соединены вместе элементом 20, также в форме резистивного элемента, чтобы генерировать вышеупомянутый сигнал безопасности. В более общем плане, элемент цепи 20 может представлять собой электропроводящий элемент, который обеспечивает, вместе с предназначенными площадками и проводящими дорожками, присутствующими на мембранной части, переключатель или электрический контакт, подходящий для подачи сигнала неисправности.
Такой случай показан на фиг. 45-46, где цепь 10 содержит две дополнительные токопроводящие дорожки 10a’, которые попадают под соответствующие формации 13 (и, следовательно, под соответствующие дорожки, такие как те, которые выполнены из материала 12 на фиг. 4) и определяют соответствующие площадки 10b’, которые электрически изолированы или независимы от дорожек 10a цепи детектирования R1, …, R4. В этом случае контактный элемент 20 может иметь концепцию, аналогичную той, которая описана со ссылкой на фиг. 36-39, то есть иметь такую форму, чтобы контактировать с площадками 10b’, а не с резисторами R2 и/или R3. Следовательно, элемент 20 может содержать две концевые части 20a и промежуточную часть 20b, как уже описано выше.
В этом случае, при наличии избыточного давления, выходной сигнал измерительной цепи не будет изменен элементом цепи 20. Однако последняя, соединяя вместе две площадки 10b’, будет генерировать дополнительный сигнал, представляющий чрезмерную деформацию мембранной части 7, причем сигнал, напротив, отсутствует, когда датчик работает в своем номинальном рабочем диапазоне. Также в случае, когда на выходной сигнал цепи измерения R1, …, R4 воздействует проблема, объясняемая в описании к фиг. 51, одновременное наличие вышеуказанного дополнительного сигнала, определяемого контактом элемента 20 с площадками 10b’, будет интерпретироваться управляющей электроникой датчика как указывающее на существование избыточного давления текучей среды. Следовательно, в вариантах осуществления изобретения этого типа площадки 10b’ и элемент цепи 20 образуют своего рода переключатель, который замыкает цепь сигнализации (предупреждения) при достижении давления текучей среды, превышающего номинальное давление датчика давления. Этот тип переключателя может содержать контактный элемент 20, предназначенный для обеспечения моста короткого замыкания между площадками 10b’, или в противном случае может обеспечивать электрическое сопротивление между площадками 10b’, в любом случае способный подавать сигнал, который может быть детектирован подходящей цепью управления.
В примере на фиг. 45-46 выходной сигнал цепи детектирования, представляющий значение измерения давления, отличается от упомянутого дополнительного сигнала безопасности, представляющего состояние аномалии. Однако датчик согласно изобретению может быть снабжен подходящей цепью для управления, обработки и передачи данных (например, в виде микросхемы, принадлежащей устройству цепи), выполненной с возможностью объединения и/или передачи набора информации относительно значения измерения и состояния аномалии, предпочтительно через одно электрическое соединение, например, последовательного типа.
Элемент цепи 20, предусмотренный согласно изобретению, может также содержать металлический или электропроводящий элемент, который вместе с по меньшей мере одним дополнительным компонентом, предусмотренным на мембранной части (предпочтительно, компонентом, не принадлежащим к цепи деформация-детектирование), детектор приближения или положения, выполненный с возможностью подачи сигнала неисправности, даже при отсутствии контакта между элементом 20 и указанным дополнительным компонентом.
Фиг. 47 иллюстрирует пример в этом смысле, для датчика 1, имеющего основную структуру типа, показанного на фиг. 1-4, где соответствующим элементу цепи 20, на мембранной части 7, является аналогичный элемент 20”, который соединен через соответствующую дорожку 10A” и соответствующую осевую дорожку 12” с цепью 8.
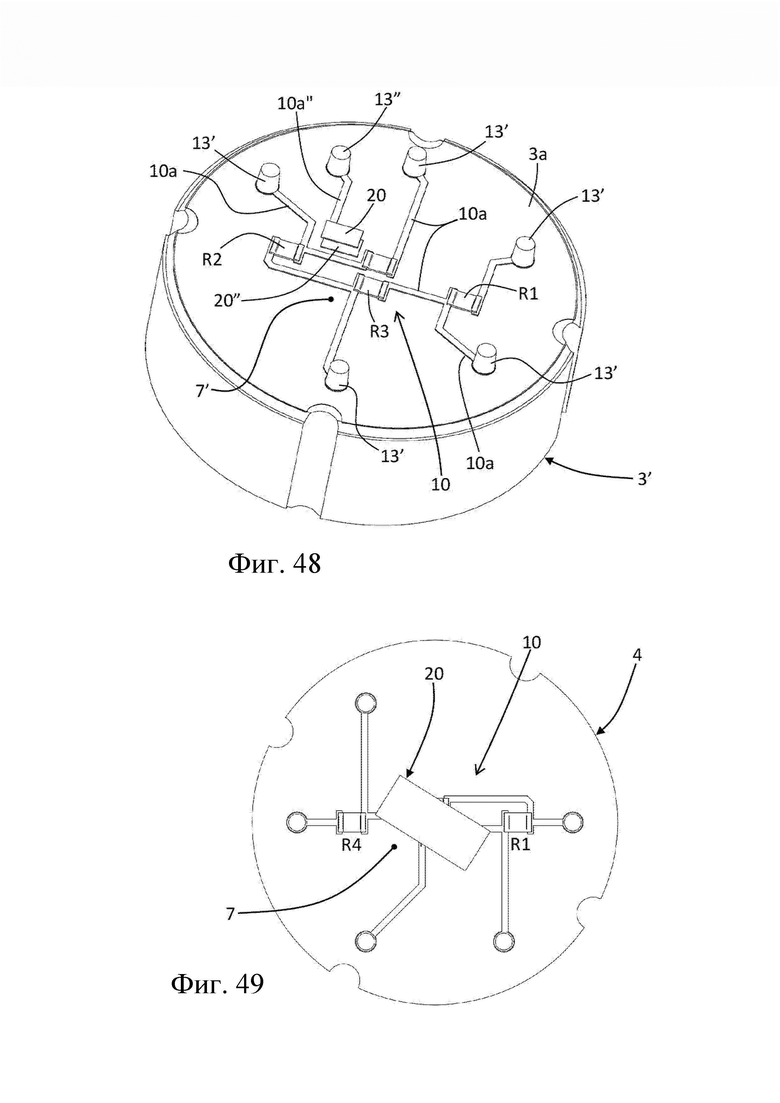
В примере можно предположить, что элементы 20 и 20” функционируют как облицовочные пластины конденсатора, например, изготовленные из металлического материала, один (20) из которых находится в фиксированном положении, а другой (20”) - в переменном положении, соединенный с управляющей электроникой. В этом применении, когда деформация мембранной части 7 является чрезмерной - то есть, она превышает предел безопасности - две пластины 20, 20” определяют между ними емкость, которая может быть детектирована устройством цепи датчика 1 (или внешней системой, к которой подключен датчик 1), что указывает на избыточное давление. Аналогичный случай проиллюстрирован на фиг. 48 в отношении датчика 1’, имеющего базовую структуру типа, проиллюстрированного на фиг. 17-19, где элемент или пластина 20”соединены с токопроводящей дорожкой 10A”, проходящей под соответствующей формацией 13”.
В примерах на фиг. 47 и 48 элементы 20 и 20” по существу обеспечивают датчик приближения емкостного типа, где элемент или пластина 20, предпочтительно в виде металлической площадки, хотя и без электрического соединения, взаимодействует с элементом или пластиной 20”, вызывая их изменение емкости; однако, при необходимости, также элемент или пластина 20 могут быть снабжены соответствующими электрическими дорожками для соединения с цепью 8 или другой частью устройства цепи датчика 1.
Аналогичные конструкции действительны для целей изготовления датчика индуктивного типа или, возможно, магнитного типа. Например, элемент 20” может содержать катушку или обмотку, выполненную из электропроводящего материала, и соответствующие электрические соединения с цепью 8, которые могут быть активированы элементом 20, предпочтительно ферромагнитного типа, для генерирования отдельного сигнала неисправности. В таком случае катушка или обмотка также может находиться на неподвижной части корпуса, а элемент 20 - на мембранной части. В качестве альтернативы, элемент 20 может содержать постоянный магнит, а элемент 20” содержит магнитный датчик, такой как датчик Холла. Также в этом случае магнитный датчик 20” может находиться на неподвижной части корпуса, а магнитный элемент 20 - на мембранной части.
Фиг. 49 и 50 относятся к варианту осуществления изобретения, концептуально аналогичному варианту осуществления изобретения, проиллюстрированному на фиг. 34-37 (или, возможно, на фиг. 45-46), где, однако, элемент цепи 20, присутствующий перед мембранной частью 7, имеет упрощенную форму. В примере элемент 20 имеет форму простой пластины или прокладки, имеющей четырехугольный, предпочтительно прямоугольный, профиль с наклоном относительно цепи 10, так что он может контактировать с площадками 10b, предпочтительно (но не обязательно) без контакта с резисторами R2 и R3. В случае, когда целью является предотвращение контакта с сопротивлениями, как в случае с фиг. 34-37 (или фиг. 45-46), предпочтительно, чтобы верхняя часть площадок 10b была расположена на высоте, большей, чем сопротивления R2 и R3, как можно видеть на фиг. 50.
Различные электропроводящие дорожки и/или резисторы и/или описанные выше элементы цепи могут быть получены на соответствующих частях корпуса 2 датчика с помощью способа, отличного от трафаретной печати, даже если это предпочтительный способ; например, альтернативные методы в этом смысле могут быть выбраны из литографии, фотолитографии, распыления проводящего материала, поверхностной металлизации, нанесения покрытий и т. д.
Как уже упоминалось выше, наличие активных или пассивных компонентов цепи в цепи 8 не является строго необходимым, поскольку обработка и/или преобразование сигнала или сигналов, генерируемых посредством цепи 10, может быть выполнена во внешней системе, к которой подключен датчик давления: следовательно, в таких вариантах осуществления изобретения цепь 8 может выполнять простые функции интерфейса или соединения, представляя только площадки 8b и соответствующие соединительные дорожки 8b.
Датчик давления согласно настоящему изобретению может в любом случае содержать активные или пассивные компоненты контура в цепи 8, например, как показано на фиг. 17. В примере цепь 8 датчика 1’ содержит цепь управления и/или обработки и/или передачи MP, например, в виде чипа или матрицы, которая может содержать цифровой процессор (такой как микропроцессор или цепь микроконтроллера или интегрированная цепь ASIC или FPGA), который может быть снабжен или иметь комбинированные средства электронной памяти, предпочтительно энергонезависимого и/или перезаписываемого в электронном виде типа. Такая цепь MP, кроме того, снабжена входами и выходами и, предпочтительно, средствами аналого-цифрового преобразования. Цепь MP может, при необходимости, также предусматривать цепь передачи данных в последовательном формате, очень предпочтительно, посредством SENT (одноконцевая передача Nibble) или CAN (контроллерная сеть) интерфейса и/или протокола, или в ином случае в формате Ethernet.
Цепь управления, например, типа, обозначенного MP на фиг. 17, может быть выполнена с возможностью подачи цифрового сигнала последовательного типа, подходящего для представления множественной информации на одном и том же последовательном выходе, такой как значение измерения давления и возможное состояние аномалии. Такая цепь управления также может быть выполнена с возможностью различения в одном входном сигнале информации, представляющей значение измерения давления, от информации, представляющей возможное состояние аномалии, с последующей передачей их отдельно или последовательно.
Элемент цепи, предусмотренный согласно изобретению, который предназначен для взаимодействия с цепью, присутствующей на мембранной части датчика, может быть получен непосредственно из соответствующей части корпуса датчика (части 3 или 4’, в случае структур датчика типа, описанных со ссылкой на фиг. 1-4 или фиг. 17-19, соответственно), когда эта часть корпуса выполнена из металла или электропроводящего материала, по меньшей мере в ее части, обращенной к мембранной части датчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2011 |
|
RU2556751C2 |
| Датчик давления | 2013 |
|
RU2634089C2 |
| КРЕПЕЖНЫЙ ЭЛЕМЕНТ, ПРИМЕНЕНИЕ ДАТЧИКА, ВСТРОЕННОГО В КРЕПЕЖНЫЙ ЭЛЕМЕНТ, И СПОСОБ ДЕТЕКЦИИ ТЕПЛОВОГО ПОТОКА ВНУТРИ МЕХАНИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2714834C2 |
| ДАТЧИК ДАВЛЕНИЯ | 2010 |
|
RU2521869C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ И ТЕМПЕРАТУРЫ | 2015 |
|
RU2603446C1 |
| ПОЛУПРОВОДНИКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ | 2013 |
|
RU2537517C1 |
| ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2008 |
|
RU2384825C1 |
| ЭЛЕКТРИЧЕСКАЯ СБОРКА С ПОКРЫТИЕМ | 2013 |
|
RU2620413C2 |
| Устройство детектирования | 2015 |
|
RU2720580C2 |
| Устройство для измерения давления в слое крупнозернистого материала | 2017 |
|
RU2682974C1 |
Датчик (1) для детектирования давления текучей среды содержит корпус (2) датчика, который содержит по меньшей мере одну первую часть (3) корпуса и одну вторую часть (4) корпуса, каждая из которых имеет первую грань и вторую грань, противоположные друг другу. Первая часть (3) корпуса и вторая часть (4) корпуса соединены друг с другом таким образом, что первая грань первой части (3) корпуса обращена к первой грани второй части (4) корпуса на расстоянии от нее. По меньшей мере одна из первой части (3) корпуса и второй части (4) корпуса содержит мембранную часть (7), подверженную упругому изгибу или деформации в направлении к другой одной из первой части (3) корпуса и второй части (4) корпуса в результате давления текучей среды, причем мембранной частью (7) определена первая грань первой части (3) корпуса или второй части (4) корпуса. Датчик (1) давления имеет устройство (8, 10) цепи, которое поддерживается корпусом (2) датчика и которое содержит по меньшей мере одну первую электрическую цепь (10), которая проходит по меньшей мере частично в области, соответствующей мембранной части (7), и конфигурирована для детектирования ее упругого изгиба или деформации посредством по меньшей мере одного соответствующего компонента (R1, R2, R4) детектирования. Первая электрическая цепь (10) связана с первой гранью одной из первой части (3) корпуса и второй части (4) корпуса, а первая грань другой одной из первой части (3) корпуса и второй части (4) корпуса образует или имеет связанный с ней по меньшей мере один элемент (20) цепи, предварительно предназначенный для взаимодействия с первой электрической цепью (10), когда упругий изгиб или деформация мембранной части (7) имеет степень, по меньшей мере равную по существу предварительно определенному пределу, чтобы генерировать посредством этого информацию или предупреждение, представляющие по меньшей мере одно из избыточного давления текучей среды, некорректного измерения давления и аномального состояния устройства. Технический результат – сокращение ошибок детектирования за счет обеспечения возможности точно различать, когда давление детектируемой текучей среды превышает верхний предел номинального рабочего диапазона датчика. 2 н. и 13 з.п. ф-лы, 51 ил.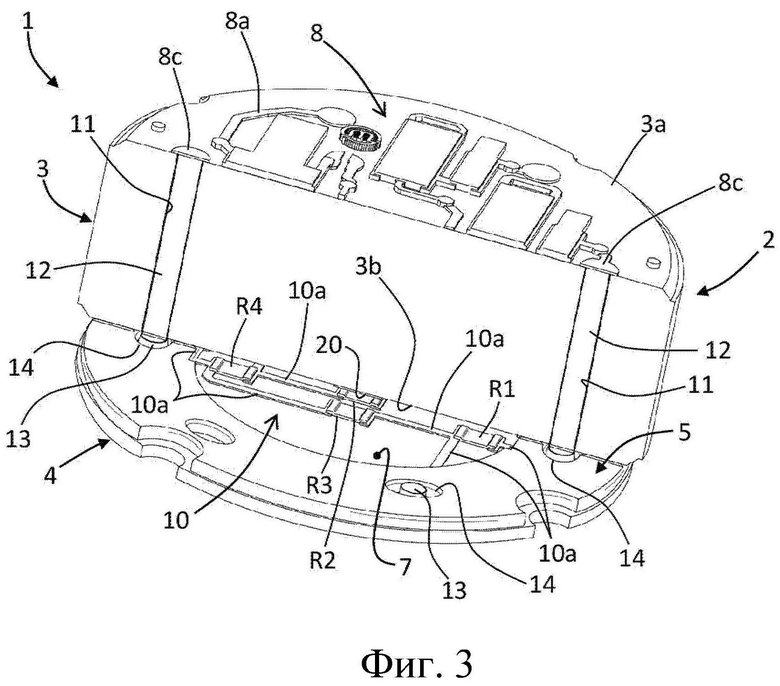
1. Датчик давления для детектирования давления текучей среды в номинальном рабочем диапазоне, при этом датчик давления (1) имеет корпус (2; 2') датчика, который содержит по меньшей мере одну первую часть (3; 3’) корпуса и одну вторую часть (4; 4’) корпуса, каждая из которых имеет первую грань и вторую грань, противоположные друг другу,
при этом первая часть (3; 3’) корпуса и вторая часть (4; 4’) корпуса соединены друг с другом таким образом, что первая грань первой части (3; 3’) корпуса обращена к первой грани второй части (4; 4’) корпуса на расстоянии от нее;
при этом по меньшей мере одна из первой части (3; 3’) корпуса и второй части (4, 4’) корпуса содержит мембранную часть (7; 7’), подверженную упругому изгибу или деформации в направлении к другой одной из первой части (3; 3’) корпуса и второй части (4; 4’) корпуса в результате давления текучей среды, причем мембранной частью (7; 7’) определена по меньшей мере часть первой грани первой части (3; 3’) корпуса или второй части (4; 4’) корпуса;
причем датчик (1) давления имеет устройство (8, 10) цепи, которое поддерживается корпусом (2) датчика и которое содержит по меньшей мере одну первую электрическую цепь (10), проходящую по меньшей мере частично на мембранной части (7; 7’) и выполненную с возможностью по меньшей мере детектирования одного указанного упругого изгиба или деформации посредством по меньшей мере одного соответствующего компонента (R1, R2, R3, R4) детектирования для предоставления первой информации, представляющей измерение давления, содержащегося в указанном номинальном рабочем диапазоне;
при этом первая электрическая цепь (10) связана с первой гранью одной из первой части (3; 3’) корпуса и второй части (4; 4’) корпуса и первая грань другой одной из первой части (3; 3’) корпуса и второй части (4; 4’) корпуса образует или имеет связанный с ней по меньшей мере один элемент (20) цепи, выполненный с возможностью взаимодействия с первой электрической цепью (10), когда одно из указанных упругого изгиба или деформации мембранной части (7; 7’) имеет степень, по меньшей мере равную по существу предварительно определенному пределу безопасности, для генерирования таким образом второй информации, представляющей избыточное давление текучей среды, превышающее указанный номинальный рабочий диапазон, или аномальное состояние датчика (1) давления.
2. Датчик давления по п.1, причем по меньшей мере один элемент (20) цепи представляет собой элемент, функционально отличный от первой электрической цепи (10).
3. Датчик давления по п.1 или 2, причем по меньшей мере один элемент (20) цепи содержит элемент, выполненный из электропроводящего материала, такого как резистивный материал, или металлический материал, или материал с высокой электропроводностью, с которым по меньшей мере одна часть первой электрической цепи (10) вступает в контакт после того, как одно из указанного упругого изгиба или деформации мембранной части (6; 6’) имеет степень, по меньшей мере равную указанному по существу предварительно определенному пределу безопасности.
4. Датчик давления по п.3, причем указанная часть первой электрической цепи (10) содержит по меньшей мере одно из следующего:
- один указанный компонент (R1, …, R4) детектирования;
- электропроводящую дорожку (10a) для присоединения одного указанного компонента (R1, …, R4) детектирования; и
- контактную площадку (10b; 10b’), электрически соединенную с электропроводящей дорожкой (10a; 10a’) первой электрической цепи (10).
5. Датчик давления по п.3 или 4, причем:
- датчик (1; 1’) давления выполнен с возможностью детектирования давлений текучей среды, содержащихся в указанном номинальном рабочем диапазоне, между минимальным давлением и максимальным давлением;
- первая электрическая цепь (10) выполнена с возможностью подачи выходного сигнала, который представляет собой значение давления текучей среды, причем выходной сигнал представляет собой электрическую величину, которая может принимать значение, содержащееся в диапазоне номинальных значений, между минимальным значением и максимальным значением, которые соответствуют указанному минимальному давлению и указанному максимальному давлению соответственно; и
- контакт между по меньшей мере одним элементом (20) цепи и по меньшей мере одной частью первой электрической цепи (10) вызывает изменение выходного сигнала таким образом, что значение соответствующей электрической величины не содержится в указанном диапазоне номинальных значений.
6. Датчик давления по любому из пп.1-5, причем:
- по меньшей мере один элемент (20) цепи относится к сигнальной цепи;
- взаимодействие между по меньшей мере одним элементом (20) цепи и по меньшей мере одной частью первой электрической цепи (10) вызывает соответствующий сигнал, представляющий указанную вторую информацию или сигнализацию, которые не зависят от выходного сигнала первой электрической цепи (10), представляющей указанную первую информацию.
7. Датчик давления по п.1, причем указанный по меньшей мере один элемент (20) цепи содержит первый электропроводящий элемент, который вместе с по меньшей мере одним вторым электропроводящим элементом (20”), связанным с первой гранью, с которой также связана первая электрическая цепь (10), обеспечивает детектор приближения или положения, причем детектор приближения или положения выполнен с возможностью генерирования указанной второй информации или сигнализации даже при отсутствии контакта между первым электропроводящим элементом и вторым электропроводящим элементом (20”), когда один указанный упругий изгиб или деформация мембранной части (6; 6’) имеет степень, по меньшей мере равную указанному по существу предварительно определенному пределу безопасности.
8. Датчик давления по п.7, причем детектор приближения или положения является индуктивным, или емкостным, или магнитным.
9. Датчик давления по любому из пп.1-8, причем по меньшей мере один компонент (R1, R2, R3, R4; 20”) детектирования выбран из резистивных компонентов, пьезорезистивных компонентов, пьезоэлектрических компонентов.
10. Датчик давления по любому из пп.1-9, причем устройство (8, 10) цепи дополнительно содержит:
- вторую электрическую цепь (8), связанную со второй гранью другой между первой частью (3; 3’) корпуса и второй частью (4; 4’) корпуса; и
- средства соединения, которые электрически соединяют первую электрическую цепь (10) со второй электрической цепью (8) и проходят по меньшей мере в осевом направлении корпуса (2) датчика.
11. Датчик давления по п. 10, причем средства соединения содержат по меньшей мере одно из следующего:
- множество сквозных отверстий (11) другой из первой части (3; 3’) корпуса и второй части (4; 4’) корпуса, которые проходят в осевом направлении между соответствующей первой гранью и второй гранью; и
- множество проходов или сквозных проемов (14) слоя (5) материала, расположенного между первой гранью первой части (3; 3’) корпуса и первой гранью второй части (4; 4’) корпуса,
причем средства соединения дополнительно содержат электропроводящий материал (12, 13; 12, 13, 12”; 13’; 13”), который проходит внутри каждого из сквозных отверстий (11) и/или каждого из проходов или сквозных проемов (14) и электрически соединяет первую электрическую цепь (10) со второй электрической цепью (8).
12. Датчик давления по любому из пп.1-11, причем между первой гранью первой части (3) корпуса и первой гранью второй части (4) корпуса расположен кольцевой слой (5) уплотнительного материала, причем первая грань первой части (3) корпуса, первая грань второй части (4) корпуса и кольцевой слой (5) уплотнительного материала ограничивают полость (7) корпуса (2) датчика.
13. Датчик давления по любому из пп.1-11, причем по меньшей мере одна из первой части (3’) корпуса и второй части (4’) корпуса имеет осевую полость (6’), закрытую мембранной частью (7’) на ее соответствующей первой грани (3a), причем осевая полость (6) открыта на соответствующей второй грани (3b) для приема текучей среды, давление которой подлежит детектированию.
14. Датчик давления по любому из пп.1-13, причем устройство (8, 10) цепи выполнено с возможностью генерирования одного из:
- одиночный сигнал, содержащий как указанную первую информацию, так и указанную вторую информацию, причем устройство (8, 10) цепи предпочтительно выполнено с возможностью идентификации указанной первой информации и указанной второй информации в одиночном сигнале, в частности, для целей последующей передачи;
- первый сигнал, содержащий указанную первую информацию, и второй сигнал, содержащий указанную вторую информацию, причем устройство (8, 10) цепи предпочтительно выполнено с возможностью объединения первого сигнала и второго сигнала в одном сигнале, в частности, для целей последующей передачи.
15. Устройство детектирования давления, содержащее датчик давления по одному или более из пп.1-14.
| US 20170292887 A1, 12.10.2017 | |||
| WO 2007010570 A1, 25.01.2007 | |||
| WO 2007032032 A1, 22.03.2007 | |||
| EP 3098584 B1, 11.09.2019. |

