ОБЛАСТЬ ТЕХНИКИ
[0001] Заявленное техническое решение в общем относится к области вычислительной техники, а в частности к автоматизированному способу и системе автоматизированного построения маршрута на основании параметров управления водителем транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002] Из уровня техники известен патент US 20210284178 A1 "System and method for driver scoring with machine learning", патентообладатель: CALAMP CORP, опубликовано: 16.09.2021. В данном решении описывается транспортное средство, содержащее специальное устройство, которое постоянно в режиме реального времени собирает информацию со встроенных датчиков о состоянии и передвижении транспортного средства. Собранные данные с определенной частотой передаются на сервер. Сервер принимает данные и обрабатывает, формируя поездки и сохраняя статистику поездок в определенном формате в базе данных. Далее по запросу пользователя массив обработанных поездок и соответствующей им статистики запрашивается из базы данных, формируется в интервалы и затем обрабатывается с помощью моделей машинного обучения: каждый интервал данных классифицируется и затем прогнозируются целевые признаки скоринга (скоринговый балл, экологический индекс, и др.) Собранная и подготовленная информация о скоринге предоставляется пользователю в веб-интерфейс и мобильное приложение.
[0003] В случае, если пользователь отметил поездки тегами, при запросе поездок и соответствующей им статистики из базы данных, дополнительно формируются интервалы на каждый сохраненный тег, которые обрабатываются с помощью моделей машинного обучения и им присваиваются целевые признаки скоринга. Пользователь может просматривать информацию о своих скоринговых признаках по отдельным тегам относительно общих показателей, а также то, насколько отдельный тег положительно, либо отрицательно, влияет на скоринговые признаки. Также, известное решение на основании исторически выявленных точек маршрута в части поведения пользователя на них может также формировать оповещения для него, предупреждая об участках, где он может улучшить скоринг своего вождения.
[0004] Недостатком известного решения в данной области техники является отсутствие возможности формирования альтернативного маршрута следования ТС, в случае если скоринговый рейтинг водителя ниже порогового значения, присвоенного маршруту следования, или возникновение на маршруте следования ТС критических ситуаций или событий, что может привести к вероятности попадания в дорожно-транспортное происшествие (ДТП).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] В заявленном техническом решении предлагается новый подход к автоматизированному способу построения маршрута на основании параметров управления водителем транспортного средства (ТС). В данном решении используются алгоритмы машинного обучения, которые позволяют автоматизировать процесс оценки построения маршрута следования ТС на основании параметров управления водителем ТС, что позволяет снизить вероятность ДТП на маршруте следования ТС.
[0006] Техническим результатом, достигающимся при реализации заявленного решения, является обеспечение автоматизированного построения альтернативных маршрутов следования ТС, за счет анализа параметров управления водителем ТС, статистики эксплуатации ТС, а также данных, в возникающих критических ситуациях на маршруте следования ТС.
[0007] Дополнительным техническим результатом является повышение безопасности передвижения ТС.
[0008] Указанные технические результаты достигаются благодаря осуществлению компьютерно-реализуемого способа автоматизированного построения маршрута на основании параметров управления водителем транспортного средства (ТС), содержащий этапы, на которых:
- получают данные телеметрии с телематического устройства, установленного на ТС, и данные о маршруте следования ТС;
- выявляют аварийно-опасные участки на маршруте следования ТС с помощью первой модели машинного обучения, обученной на статистических и гео-пространственных данных о дорожно-транспортных происшествиях (ДТП);
- определяют параметр управления ТС, характеризующий качество управления водителем ТС, с помощью второй модели машинного обучения, обученной на данных об управлении множеством водителей ТС и типовых маршрутах следования водителем данного ТС;
- сравнивают полученный параметр управления водителем ТС с заданным пороговым значением, присвоенным маршруту следования ТС, и, если параметр управления водителем ТС ниже заданного порогового значения, формируют по меньшей мере один альтернативный маршрут следования ТС;
- передают сформированный маршрут на устройство отображения.
[0009] В одном из частных вариантов реализации способа телематическое устройство содержит акселерометр, антенну ГНСС и средство беспроводной связи.
[0010] В другом частном варианте реализации способа телематическое устройство дополнительно содержит одно из: датчик температуры, датчик дыма, датчик давления, гироскоп.
[0011] В другом частном варианте реализации способа средство беспроводной связи выбирается из группы: модем или Wi-Fi модуль.
[0012] В другом частном варианте реализации способа телематическое устройство представляет собой группу устройств интернета вещей (IoT).
[0013] В другом частном варианте реализации способа параметр, характеризующий управление водителем ТС, является оценка качества вождения водителем ТС.
[0014] В другом частном варианте реализации способа качество вождения ТС включает в себя по меньшей мере одно из: соблюдение правил ПДД, резкое ускорение, резкое торможение, резкий поворот, резкое перестроение.
[0015] В другом частном варианте реализации способа заданный порог значения, присвоенный к маршруту следования ТС, определяется исходя из информации об аварийно-опасных участках, трафике движения ТС, погодных условиях, сезонности, времени суток, параметра вождения водителем ТС.
[0016] Кроме того, заявленный технический результат достигается за счет системы автоматизированного построения маршрута на основании параметров управления водителем транспортного средства (ТС), содержащая, связанные между собой средствами беспроводной связи телематическое устройство, установленное на ТС, и сервер обработки данных, выполненный с возможностью:
- получения данных телеметрии с телематического устройства, установленного на ТС, и данных о маршруте следования ТС;
- выявления аварийно-опасных участков на маршруте с помощью первой модели машинного обучения, обученной на статистических и гео-пространственных данных о дорожно-транспортных происшествиях (ДТП);
- определения параметра, характеризующего управление водителем ТС, с помощью второй модели машинного обучения, обученной на данных об управлении множеством водителей ТС и типовых маршрутах следования водителем данного ТС;
- сравнения полученного параметра управления водителем ТС с заданным пороговым значением, присвоенным маршруту следования ТС, и, если параметр управления водителем ТС ниже заданного порогового значения, формирования по меньшей пере одного альтернативного маршрута следования ТС;
- передачи сформированного маршрута на устройство отображения.
[0017] В одном из частных вариантов реализации системы телематическое устройство содержит акселерометр, антенну ГНСС и средство беспроводной связи.
[0018] В другом частном варианте реализации системы телематическое устройство дополнительно содержит одно из: датчик температуры, датчик дыма, или датчик давления.
[0019] В другом частном варианте реализации системы средство беспроводной связи выбирается из группы: модем или Wi-Fi модуль.
[0020] В другом частном варианте реализации системы телематическое устройство представляет собой группу устройств интернета вещей (IoT).
[0021] В другом частном варианте реализации системы параметр, характеризующий управление водителем ТС, является оценка качества вождения водителем ТС.
[0022] В другом частном варианте реализации системы качество вождения ТС включает в себя по меньшей мере одно из: соблюдение правил ПДД, резкое ускорение, резкое торможение, резкий поворот, резкое перестроение.
[0023] В другом частном варианте реализации системы заданный порог значения, присвоенный к маршруту следования ТС, определяется исходя из информации об аварийно-опасных участках, трафике движения ТС, погодных условиях, сезонности, времени суток, параметра вождения водителем ТС.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0024] Признаки и преимущества настоящего изобретения станут очевидными из приводимого ниже подробного описания изобретения и прилагаемых чертежей.
[0025] Фиг. 1 иллюстрирует пример реализации системы автоматизированного построения маршрута на основании параметров управления водителем транспортного средства (ТС).
[0026] Фиг. 2 иллюстрирует блок-схему заявленного способа.
[0027] Фиг. 3 иллюстрирует пример построения альтернативного маршрута.
[0028] Фиг. 4 иллюстрирует пример вычислительного устройства.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0029] Ниже будут описаны понятия и термины, необходимые для понимания данного технического решения.
[0030] Модель машинного обучения (ММО) - совокупность методов искусственного интеллекта, характерной чертой которых является не прямое решение задачи, а обучение в процессе применения решений множества сходных задач.
[0031] Данное техническое решение может быть реализовано в виде вычислительной системы, например, в виде автоматизированной информационной системы (АИС), распределенной компьютерной системы, или машиночитаемого носителя, содержащего инструкции для выполнения вышеупомянутого способа с помощью вычислительных средств (например, процессора).
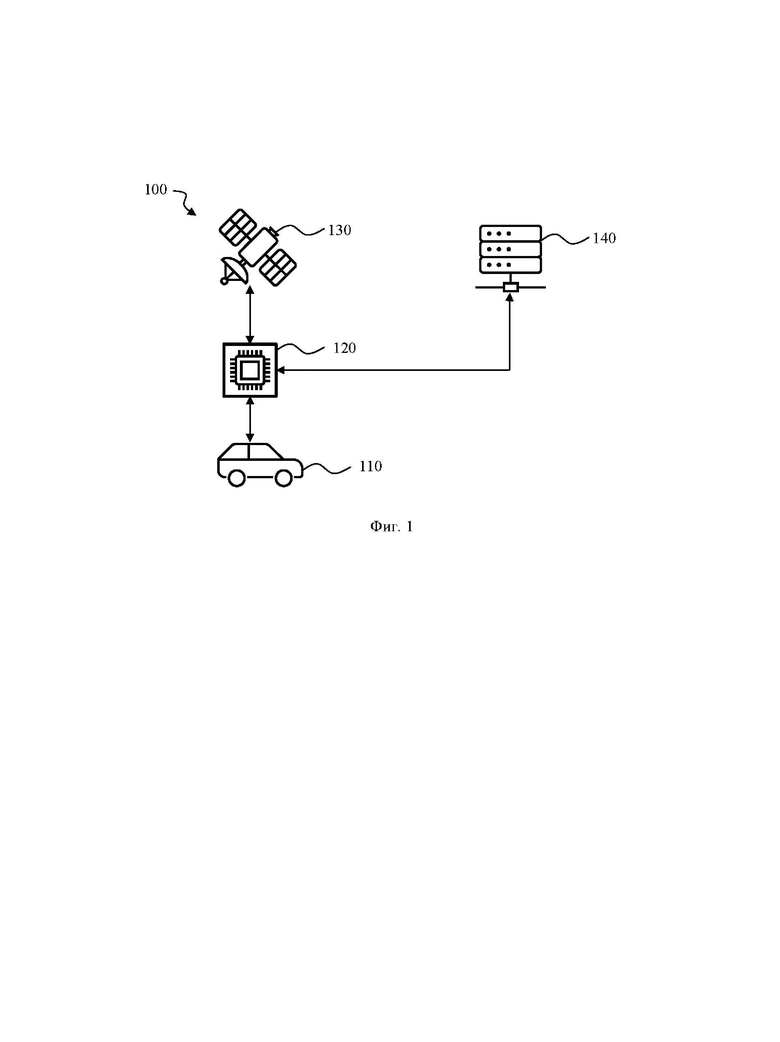
[0032] На Фиг. 1 представлена общая схема системы (100) автоматизированного построения маршрута на основании параметров управления водителем транспортного средства (ТС) (110), на котором установлено телематической устройство (120), обеспечивающее сбор данных о ТС и данных о маршруте следования ТС (110) для их передачи на сервер (140) по беспроводному каналу передачи данных, который осуществляет последующую обработка данных получаемых с телематического устройства (120).
[0033] Телематическое устройство (120) в общем случае содержит акселерометр, антенну ГНСС (Глобальная навигационная спутниковая система), обеспечивающую связь со спутником (130), и средства беспроводной связи. Телематическое устройство (120) выполняет сбор телеметрических данных с ТС (110), например, скорость, ускорение, траекторию перемещения, гео-координаты, параметры ТС, данные о маршруте следования ТС и т.п.
[0034] Дополнительно телематическое устройство (120) может содержать различного рода датчики и сенсоры, например: датчик температуры, датчик дыма, датчик давления, гироскоп и др. Телематическое устройство (120) может выполняться в виде единого блока, содержащего необходимые компоненты для реализации заданного назначения, или быть реализовано в виде группы устройств интернет вещей (IoT), связанных между собой пригодным протоколом обмена данных. Средство беспроводной связи телематического блока (120) может быть реализовано в виде модема (GSM/3G/4G/5G, спутниковая связь и т.п.) или Wi-Fi модуля.
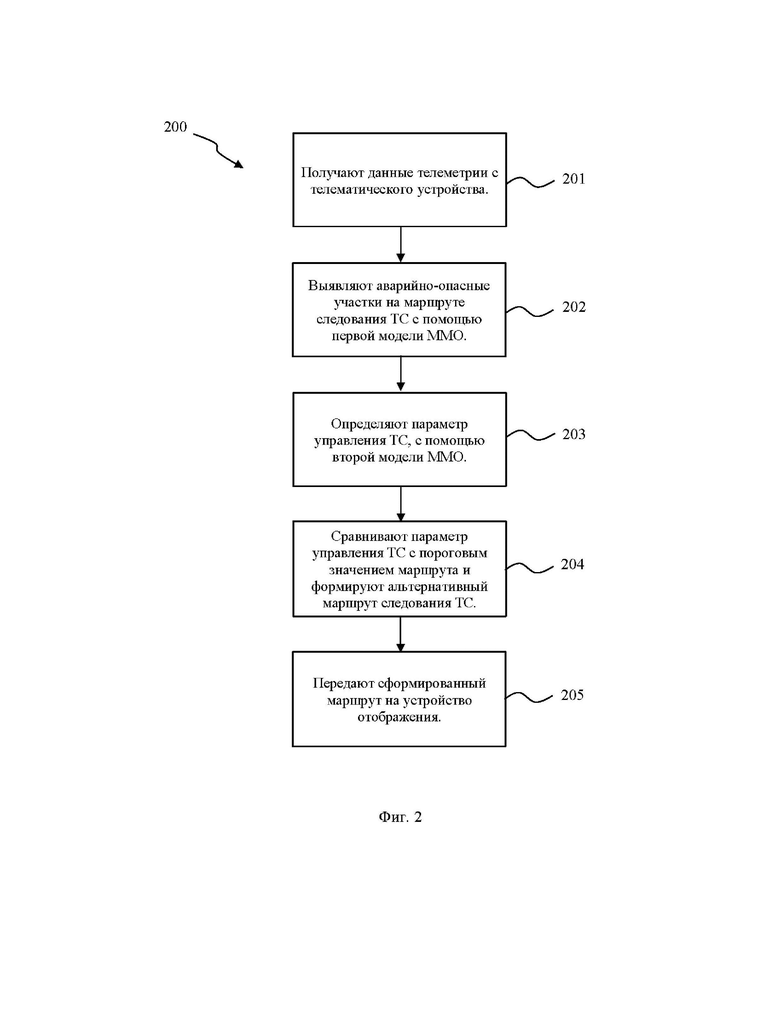
[0035] На Фиг. 2 представлена блок-схема выполнения заявленного способа (200) построения маршрута на основании параметров управления водителем ТС (110). На первом этапе (201) телематическое устройство (120), установленное на ТС (110), выполняет сбор телеметрических данных, и данных о маршруте следования ТС (110). Телематическое устройство (120), установленное на транспортное средство (110), может собирать данные о пройденном расстоянии, времени движения, геолокации автомобиля, ускорениях, торможениях, поворотах, состоянии здоровья водителя ТС (сонливость, скорость реакции, и т.д.), а также данные о маршруте следования ТС, например движение по скоростным магистралям, по проселочной дороге, в городской черте, по опасным участкам дороги и другие параметры в зависимости от конкретного оснащения и реализации телематического устройства (120).
[0036] Телеметрические данные, поступающие с устройства (120), агрегируются в пакеты данных для последующей передачи на сервер (140), который в последующем будет выполнять их анализ. Получение пакетов данных от телематического устройства (120) может быть осуществлено в любом порядке (FIFO/LIFO), в том числе с пробелами в данных, в случае если по какой-либо причине телематическое устройство (120) не в состоянии отправить на сервер (140) отдельный пакет данных.
[0037] На этапе (202) сервер (140) с помощью первой модели машинного обучения, обученной на статистических и гео-пространственных данных о ДТП, анализирует полученные данные с телематического устройства (120), выявляя предполагаемых маршрут следования и аварийно-опасные участки на маршруте следования ТС (110). На данном этапе присваивается пороговое значение маршруту следования ТС (сложность маршрута), в зависимости от разного рода факторов, например таких как: погодные условия, загруженность маршрута, скоростные ограничения, времени суток, трафике движения ТС, сезонности и т.д., тем самым, выявляя аварийно-опасные участки на маршруте следования ТС (110).
[0038] В качестве модели машинного на этапе (202) может применяться, например, LightGBM. Модель работает на потоковых данных, где основные признаки - это области, очерченные гео-координатами или «гексы», представляющие собой зоны, разделяющие цифровую карту местности, для формирования иерахического индекса на базе геопространственных координат (см. «Н3 index» // https://h3geo.org/docs/highlights/indexing/). Для упомянутых «гексов» собираются агрегированные данные об аварийности, а также актуальные данные о трафике и погоде. На основании информации об «уже пройденных «гексов» возможно предсказать каждый следующих «гекс».
[0039] На этапе (203) сервер (140) с помощью второй модели машинного обучения, обученной на данных об управлении множеством водителей ТС и типовых маршрутах следования водителем ТС, определяют параметр управления ТС, характеризующий управление водителем ТС (110). Под параметром управления ТС, подразумевается присвоение скорбалла водителю ТС (оценка качества вождения водителем ТС), на основании его навыков вождения ТС, опыте вождения ТС, количестве ДТП с участием данного водителя, нарушении правил ПДД, совершение резких маневров (резкое ускорение, резкое торможение, резкий поворот, резкое перестроение), параметрах ТС, и т.д.
[0040] Под типовым маршрутом следования водителем данного ТС (110), подразумеваются однотипные (одинаковые или стандартные) маршруты, которые водитель совершает ежедневно, не меняя при этом конфигурацию маршрута, например, маршрут "дом-работа", "работа-дом" по одним и тем же улицам или магистралям, и если по каким-либо причинам, водитель решил изменить конфигурацию стандартных маршрутов, выбрав другие не типичные для данного маршрута улицы, магистрали и т.п., то данное решение тоже влияет на конечный скорбалл водителя.
[0041] Присвоенный скорбалл доступен для ознакомления пользователю и может быть в дальнейшем скорректирован в зависимости от изменения стиля вождения ТС увеличения опыта вождения и т.п. Также телематическое устройство (120), установленное на ТС (110), может содержать оборудование, отслеживающее поведение водителя и состояние его здоровья во время вождения (например, камеру, направленную в салон ТС, и собирающую информацию о водителе). Если, например, данное оборудование зафиксировало сонливость, усталость, перевозбуждение и т.д. у водителя, то скорбалл может быть скорректирован, тем самым, будет учтено состояние водителя во время вождения.
[0042] Также, телематическое устройство (120) может отслеживать манеру вождения водителя ТС (110) и формировать оповещения, в частности, при прохождении определенных участков на маршруте (например, опасных поворотов, опасных участков в зимнее время года или опасных участков во время дождя и т.д.) выдавать звуковое (если установлена звуковая система оповещения в ТС (110)) или информационное сообщение (на устройство отображения) с рекомендациями (как правильно, на какой скорости или с какой траекторией необходимо проходить данные участки маршрута), что в дальнейшем, при соблюдении этих рекомендаций, может влиять на итоговый скорбалл водителя ТС (110). Дополнительно система формирования оповещений может предупреждать водителя ТС о приближении к участкам (точкам) маршрута, на которых ранее он допускал ошибки вождения (нарушение ПДД, резкое торможение, траектория движения и т.п.). Маршрут следования ТС (110) может разделяться на точки фиксации скоринга водителя при их прохождении, что позволяет детализировать степень вождения водителя при формировании итогового скорбалла, например, рейтинг проезда перекрестков, эстакад, тоннелей, развязок, участков с ограничением скоростного режима и т.п.
[0043] Далее на этапе (204) выполняется сравнение полученного параметра управления водителем ТС с заданным пороговым значением, присвоенным маршруту следования ТС, и, если параметр управления водителем ТС ниже заданного порогового значения, формируют по меньшей мере один альтернативный маршрут следования ТС.
[0044] На данном этапе, сервер (140) сравнивает присвоенный на этапе (203) скорбалл водителю с присвоенным на этапе (202) пороговым значением сложности маршрута, и если скорбалл водителя ниже необходимого значения, то сервер (140) рассчитывает альтернативные маршруты следования, которые являются более подходящими для данного водителя, тем самым снижая риски ДТП или иных негативных последствий.
[0045] Например, если скорбалл водителя низкий в зимнее время года и данный водитель ТС выбирает маршрут следования по скоростной магистрали, то сервер (140) учтет эти факторы и предложит альтернативный маршрут следования через город, где например, светофоры и скоростной режим не позволят водителю набрать высокую скорость и тем самым подвергнуть себя дополнительному риску связанному с управлением ТС на скоростной магистрали. Таких маршрутов может быть сформировано несколько, в зависимости от возможности проследовать из точки отправления до точки прибытия ТС с помощью нескольких разных маршрутов.
[0046] Также, например, если на маршруте следования пользователя зафиксированы участки с повышенной вероятностью возникновения ДТП (например, узкие дороги, тоннели, эстакады и т.п.), а скорбалл водителя соответствует скорбаллу "водителя-новичка" (водитель с малым опытом вождения ТС), то сервер (140) при возможности, исключит данные участки из выбранного маршрута и предложит альтернативный вариант следования по более безопасным участкам.
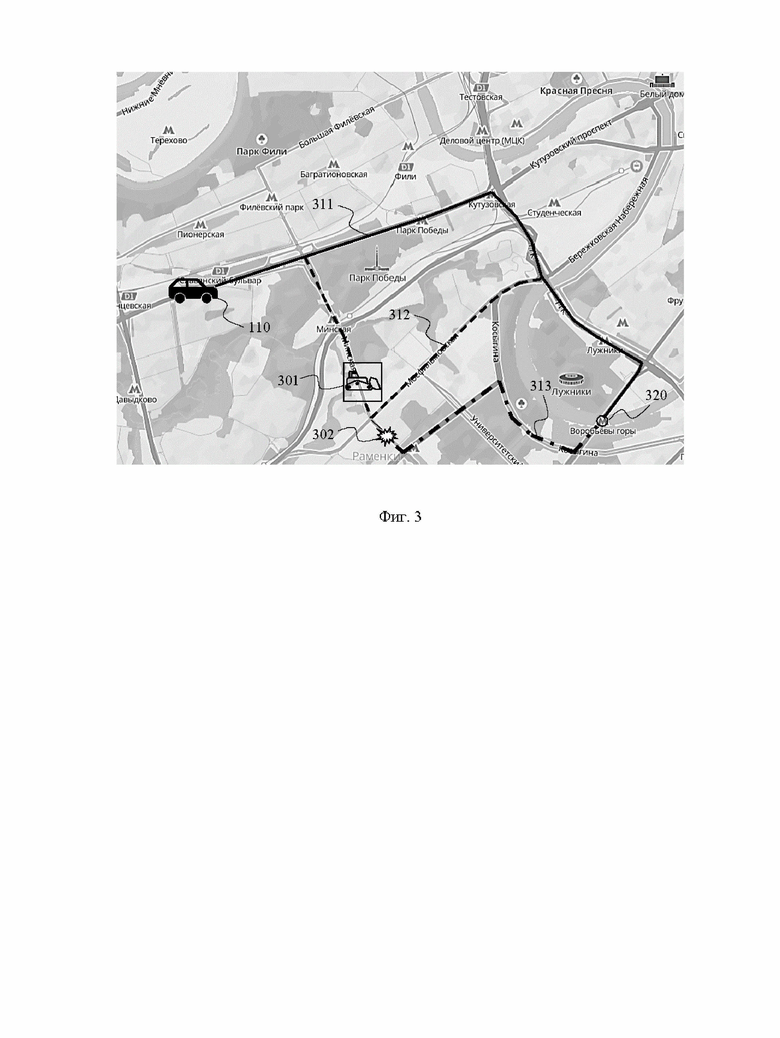
[0047] На Фиг. 3 приведен пример формирования альтернативных маршрутов в рамках заявленного решения. При анализе текущего положения ТС (110) и конечной точки маршрута (320) с помощью обработки данных сервера (140) формируется один из маршрутов, например, маршрут (313), как кратчайший маршрут до точки (320). В ходе поездки, или при получении информации о событиях на пути следования, например, строительные работы (301) или ДТП (302), а также с учетом скорбалла водителя ТС (110), сервер (140) осуществляет формирование альтернативных маршрутов (311, 312), которые могут затрачивать более длительное время в пути, но являются более безопасными для текущей обстановки (время года, суток и т.п.) на основании параметров вождения водителя ТС (110).
[0048] Если дополнительным оборудованием ТС (110) фиксируется усталость, сонливость или заторможенная реакция водителя, а маршрут следования предполагает проезд по скоростным магистралям, то сервер (140) рассчитает альтернативные маршруты следования, например через город, где скоростной режим, наличие светофоров и т.д. не позволит водителю уснуть или отвлечься от управления, тем самым снижая риски попадания в критическую ситуацию или ДТП.
[0049] Далее на этапе (205) сервер (140) передает сформированный маршрут, а также варианты альтернативных маршрутов на устройство отображения. В качестве устройства отображения может выступать, например: смартфон, портативный навигатор, головное мультимедийное устройство ТС, HUD-дисплей, проектор и т.п.
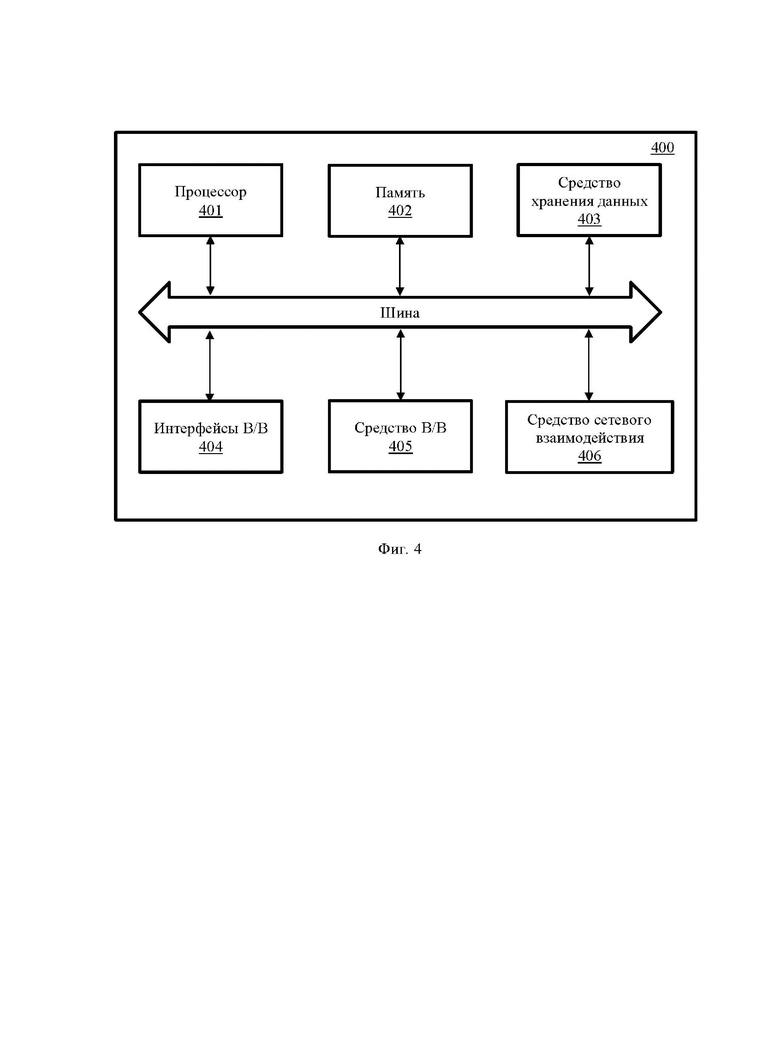
[0050] На Фиг. 4 представлен общий пример вычислительного устройства (400), которое может представлять собой, например, компьютер, сервер, ноутбук, смартфон, SoC (System-on-a-Chip/Система на кристалле) и т.п. Устройство (400) может применяться для полной или частичной реализации заявленного решения, в частности, для частичной или полной реализации телематического устройства (120) и сервера (140), а также полностью или частично исполнять заявленный способ (200).
[0051] В общем случае устройство (400) содержит такие компоненты, как: один или более процессоров (401), по меньшей мере одну оперативную память (402), средство постоянного хранения данных (403), интерфейсы ввода/вывода (404) включая релейные выходы для соединения с контроллерами управления движения ленточного конвейера, средство В/В (405), средства сетевого взаимодействия (406).
[0052] Процессор (401) устройства выполняет основные вычислительные операции, необходимые для функционирования устройства (400) или функционала одного или более его компонентов. Процессор (401) исполняет необходимые машиночитаемые команды, содержащиеся в оперативной памяти (402).
[0053] Память (402), как правило, выполнена в виде ОЗУ и содержит необходимую программную логику, обеспечивающую требуемый функционал. Средство хранения данных (403) может выполняться в виде HDD, SSD дисков, рейд массива, сетевого хранилища, флэш-памяти, оптических накопителей информации (CD, DVD, MD, Blue-Ray дисков) и т.п. Средство (403) позволяет выполнять долгосрочное хранение различного вида информации, например, запись магнитограмм, истории обработки запросов (логов), идентификаторов пользователей, данные камер, изображения и т.п.
[0054] Интерфейсы (404) представляют собой стандартные средства для подключения и работы с вычислительными устройствами. Интерфейсы (404) могут представлять, например, релейные соединения, USB, RS232/422/485 или другие, RJ45, LPT, UART, СОМ, HDMI, PS/2, Lightning, FireWire и т.п. для работы, в том числе, по протоколам Modbus и сетям Probfibus, Profinet или сетям иного типа. Выбор интерфейсов (404) зависит от конкретного исполнения устройства (400), которое может представлять собой, вычислительный блок (вычислительный модуль), например на базе ЦПУ (одного или нескольких процессоров), микроконтроллера и т.п., персональный компьютер, мейнфрейм, серверный кластер, тонкий клиент, смартфон, ноутбук и т.п., а также подключаемых сторонних устройств.
[0055] В качестве средств В/В данных (405) может использоваться: клавиатура, джойстик, дисплей (сенсорный дисплей), проектор, тачпад, манипулятор мышь, трекбол, световое перо, динамики, микрофон и т.п.
[0056] Средства сетевого взаимодействия (406) выбираются из устройства, обеспечивающего сетевой прием и передачу данных, например, Ethernet карту, WLAN/Wi-Fi модуль, Bluetooth модуль, BLE модуль, NFC модуль, IrDa, RFID модуль, GSM модем, и т.п. С помощью средства (406) обеспечивается организация обмена данными по проводному или беспроводному каналу передачи данных, например, WAN, PAN, ЛВС (LAN), Интранет, Интернет, WLAN, WMAN или GSM, квантовый (оптоволоконный) канал передачи данных, спутниковая связь и т.п. Компоненты устройства (400), как правило, сопряжены посредством общей шины передачи данных.
[0057] В настоящих материалах заявки было представлено предпочтительное раскрытие осуществления заявленного технического решения, которое не должно использоваться как ограничивающее иные, частные воплощения его реализации, которые не выходят за рамки испрашиваемого объема правовой охраны и являются очевидными для специалистов в соответствующей области техники.
Заявленное изобретение относится к области вычислительной техники, в частности к автоматизированному способу и системе автоматизированного построения маршрута на основании параметров управления водителем транспортного средства. Способ автоматизированного построения маршрута на основании параметров управления водителем транспортного средства (ТС) содержит этапы, на которых: получают данные телеметрии с телематического устройства, установленного на ТС, и данные о маршруте следования ТС; выявляют аварийно-опасные участки на маршруте следования ТС с помощью первой модели машинного обучения, обученной на статистических и геопространственных данных о дорожно-транспортных происшествиях (ДТП); определяют параметр управления ТС, характеризующий управление водителем ТС, с помощью второй модели машинного обучения, обученной на данных об управлении множеством водителей ТС и типовых маршрутах следования водителем данного ТС; сравнивают полученный параметр управления водителем ТС с заданным пороговым значением, присвоенным маршруту следования ТС, и, если параметр управления водителем ТС ниже заданного порогового значения, формируют по меньшей мере один альтернативный маршрут следования ТС; передают сформированный маршрут на устройство отображения. Технический результат – обеспечение возможности автоматизированного построения альтернативных маршрутов следования ТС. 2 н. и 12 з.п. ф-лы, 4 ил.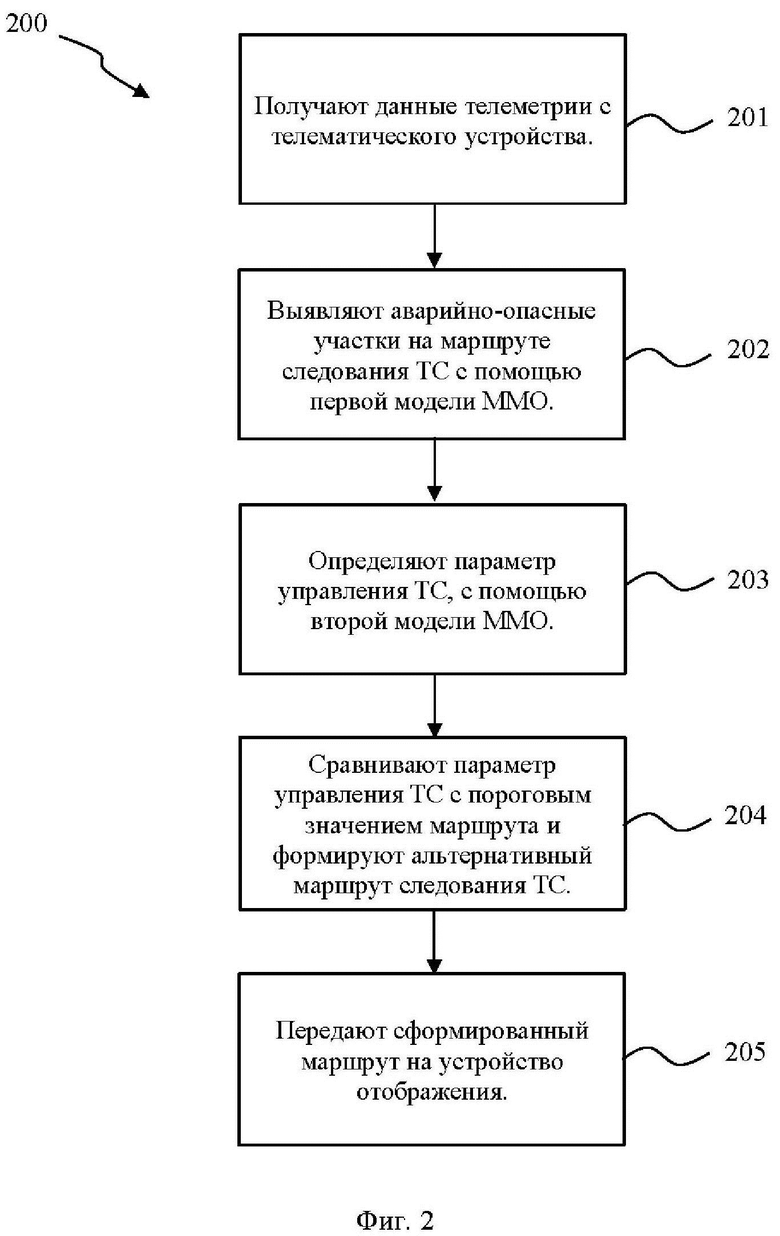
1. Компьютерно-реализуемый способ автоматизированного построения маршрута на основании параметров управления водителем транспортного средства (ТС), содержащий этапы, на которых:
- получают данные телеметрии с телематического устройства, установленного на ТС, и данные о маршруте следования ТС;
- обрабатывают полученные данные с телематического устройства, выявляют аварийно-опасные участки на маршруте следования ТС и присваивают пороговое значение маршруту следования ТС исходя из информации об аварийно-опасных участках, трафике движения ТС, погодных условиях, сезонности, времени суток, параметра вождения водителем ТС с помощью первой модели машинного обучения, обученной на статистических и геопространственных данных о дорожно-транспортных происшествиях (ДТП);
- определяют параметр управления ТС, характеризующий качество управления водителем ТС, с помощью второй модели машинного обучения, обученной на данных об управлении множеством водителей ТС и типовых маршрутах следования водителем данного ТС;
- сравнивают полученный параметр управления водителем ТС с заданным пороговым значением, присвоенным маршруту следования ТС, и, если параметр управления водителем ТС ниже заданного порогового значения, формируют по меньшей мере один альтернативный маршрут следования ТС;
- передают сформированный маршрут на устройство отображения.
2. Способ по п. 1, характеризующийся тем, что телематическое устройство содержит акселерометр, антенну ГНСС и средство беспроводной связи.
3. Способ по п. 2, характеризующийся тем, что телематическое устройство дополнительно содержит одно из: датчик температуры, датчик дыма, датчик давления, гироскоп.
4. Способ по п. 2, характеризующийся тем, что средство беспроводной связи выбирается из группы: модем или Wi-Fi-модуль.
5. Способ по п. 1, характеризующийся тем, что телематическое устройство представляет собой группу устройств интернета вещей (IoT).
6. Способ по п. 1, характеризующийся тем, что параметр, характеризующий управление водителем ТС, является оценка качества вождения водителем ТС.
7. Способ по п. 6, характеризующийся тем, что качество вождения ТС включает в себя по меньшей мере одно из: соблюдение правил ПДД, резкое ускорение, резкое торможение, резкий поворот, резкое перестроение.
8. Система автоматизированного построения маршрута на основании параметров управления водителем транспортного средства (ТС), содержащая связанные между собой средствами беспроводной связи телематическое устройство, установленное на ТС, и сервер обработки данных, выполненный с возможностью:
- получения данных телеметрии с телематического устройства, установленного на ТС, и данных о маршруте следования ТС;
- выполнения обработки полученных данных с телематического устройства, в ходе которой выявляются аварийно-опасные участки на маршруте следования ТС и присваивается пороговое значение маршруту следования ТС исходя из информации об аварийно-опасных участках, трафике движения ТС, погодных условиях, сезонности, времени суток, параметра вождения водителем ТС с помощью первой модели машинного обучения, обученной на статистических и геопространственных данных о дорожно-транспортных происшествиях (ДТП);
- определения параметра, характеризующего управление водителем ТС, с помощью второй модели машинного обучения, обученной на данных об управлении множеством водителей ТС и типовых маршрутах следования водителем данного ТС;
- сравнения полученного параметра управления водителем ТС с заданным пороговым значением, присвоенным маршруту следования ТС, и, если параметр управления водителем ТС ниже заданного порогового значения, формирования по меньшей мере одного альтернативного маршрута следования ТС;
- передачи сформированного маршрута на устройство отображения.
9. Система по п. 8, характеризующаяся тем, что телематическое устройство содержит акселерометр, антенну ГНСС и средство беспроводной связи.
10. Система по п. 9, характеризующаяся тем, что телематическое устройство дополнительно содержит одно из: датчик температуры, датчик дыма или датчик давления.
11. Система по п. 9, характеризующаяся тем, что средство беспроводной связи выбирается из группы: модем или Wi-Fi-модуль.
12. Система по п. 8, характеризующаяся тем, что телематическое устройство представляет собой группу устройств интернета вещей (IoT).
13. Система по п. 8, характеризующаяся тем, что параметр, характеризующий управление водителем ТС, является оценкой качества вождения водителем ТС.
14. Система по п. 13, характеризующаяся тем, что качество вождения ТС включает в себя по меньшей мере одно из: соблюдение правил ПДД, резкое ускорение, резкое торможение, резкий поворот, резкое перестроение.
| US 20180276485 A1, 27.09.2018 | |||
| US 11578990 B1, 14.02.2023 | |||
| US 20190033847 A1, 31.01.2019 | |||
| US 11107365 B1, 31.08.2021 | |||
| Система контроля и мониторинга маршрутизированных автотранспортных средств | 2018 |
|
RU2712404C2 |
