Изобретение относится к области гидроакустики и может быть использовано при разработке средств поиска объектов, находящихся в верхнем слое морского дна, и невидимых для таких гидролокационных средств, как гидролокатор бокового обзора.
Известен способ обнаружения объектов, находящихся в толще донного грунта, и определения их местоположения, в котором акустическое зондирование верхнего слоя донного грунта осуществляется одновременно с зондированием поверхности морского дна локатором бокового обзора (Патент РФ №2280 266 С2, МПК G01S 15/04, опубл. 20.07. 2006г. Бюлл. №20). Для этого на носителе гидролокационной аппаратуры устанавливают приёмопередающую антенну гидролокатора бокового обзора и дополнительные направленные в вертикальной плоскости излучающую и приёмную акустические антенны, работающие синхронно с приёмопередающей антенной гидролокатора бокового обзора. Затем, перемещая носитель гидролокационной аппаратуры над дном, излучают приёмопередающей антенной гидролокатора бокового обзора в водную среду в сторону дна импульсный акустический сигнал, принимают отражённый от объекта, находящегося в толще донного грунта, в обратном направлении отражённый акустический сигнал той же акустической антенной, измеряют время t распространения акустического сигнала туда и обратно и отображают пространственно-временное положение объекта. Синхронно с излучением антенны гидролокатора бокового обзора излучают в водную среду импульсный акустический сигнал дополнительной направленной в вертикальной плоскости антенной под углом падения

где ρ12=ρ1/ρ2, c12=c1/c2, ρ1, ρ2, c1, c2-плотность и скорость звука в воде и грунте соответственно,
принимают отражённый от находящегося в толще донного грунта объекта акустический сигнал направленной в вертикальной плоскости дополнительной приёмной акустической антенной под критическим углом приёма  , перемещают направленную в вертикальной плоскости дополнительную излучающую антенну на расстоянии от дна Z1, связанном с глубиной Z2 предполагаемого местоположения объекта в толще донного грунта соотношением Z1=Z2/ρ12, и вычисляют расстояние до объекта по формуле
, перемещают направленную в вертикальной плоскости дополнительную излучающую антенну на расстоянии от дна Z1, связанном с глубиной Z2 предполагаемого местоположения объекта в толще донного грунта соотношением Z1=Z2/ρ12, и вычисляют расстояние до объекта по формуле
Недостатком указанного способа является малая дальность действия и малая глубина проникновения звуковой волны в грунт на частотах локатора бокового обзора. Это связано с тем, что грунтовая составляющая, которая возбуждается в составе придонной волны пограничного типа и используется в этом способе в качестве информативной составляющей, достаточно быстро затухает с расстоянием и глубиной в донном грунте.
Известен способ обнаружения объектов, находящихся в толще донного грунта, и определения их местоположения, в котором с носителя гидролокационной аппаратуры излучают гидроакустическим излучателем в водную среду импульсный акустический сигнал, принимают приёмной системой отражённый от находящегося в толще донного грунта объекта акустический сигнал, перемещают носитель гидролокационной аппаратуры с гидроакустическим излучателем относительно предполагаемого местоположения объекта на расстоянии от дна Z1, связанном с глубиной Z2 предполагаемого местоположения объекта в толще донного грунта соотношением Z1=Z2/ρ12, отличающийся тем, что для уменьшения затухания сигнала в грунте и увеличения дальности действия в качестве импульсного акустического сигнала используют низкочастотный (λ>Z2, λ - длина волны) фазоманипулированный сигнал, в качестве приёмной системы используют установленный на дно акустический комбинированный приёмник, содержащий канал звукового давления, три ортогональных канала вектора колебательной скорости и датчик углового положения локальной системы координат, связанной с комбинированным приёмником, относительно географической системы координат. Для обнаружения объекта перемещают носитель гидролокационной аппаратуры с излучателем по круговой траектории, в центре которой находится приёмная система, формируют в режиме приёма статический веер характеристик направленности, содержащий 8 горизонтальных односторонне направленных пространственных каналов, сдвинутых друг относительно друга на 45°, измеряют в n-ом пространственном канале (n=1-8), ориентированном на носитель гидролокационной аппаратуры с излучателем, время распространения t1 акустического сигнала от излучателя до приёмной системы, измеряют в m-ом пространственном канале (m=1-8), ориентированном на находящийся в толще донного грунта объект, сдвинутом на 180° относительно n-ого пространственного канала, ориентированного на носитель гидролокационной аппаратуры с излучателем, время распространения t2 акустического сигнала от излучателя до находящегося в толще донного грунта объекта и от объекта до приёмной системы, определяют горизонтальное расстояние от находящегося в толще донного грунта объекта до приёмной системы по формуле

вычисляют горизонтальные компоненты вектора интенсивности Ix, Iy в локальной системе координат, связанной с комбинированным приёмником, вычисляют пеленг на находящийся в грунте объект в локальной системе координат, связанной с комбинированным приёмником, по формуле
пересчитывают пеленг, измеренный в локальной системе координат, связанной с комбинированным приёмником, в географическую систему координат по формуле
φгео=φ0-φлок
где φ0 - угол поворота локальной системы координат, связанной с комбинированным приёмником, относительно географической системы координат, измеряемый датчиком углового положения, и определяют местоположение объекта, находящегося в толще донного грунта, координатами (r, φгео), измеренными относительно приёмной системы, координаты которой считаются известными.
Данный способ обнаружения объектов, находящихся в толще донного грунта, и определения их местоположения является наиболее близким к заявленному изобретению и принимается за прототип.
Недостатком указанного способа является малая дальность обнаружения объектов, отражающая способность которых мала и уменьшается с понижением рабочей частоты, например, донных мин, пластиковый корпус которых имеет малую отражающую способность (силу цели). Кроме того, использование в режиме излучения слабонаправленного низкочастотного излучателя (λ>Z2, λ - длина волны) увеличивают уровень сигналов, отражённых в обратном направлении от границы вода-морское дно, которые маскируют полезный сигнал, отражённый от объектов, находящихся в толще донного грунта, формируя некоторую «мёртвую зону».
Цель настоящего изобретения заключается в устранении этих недостатков и разработке способа обнаружения объектов, находящихся в толще донного грунта, и определения их местоположения, позволяющего повысить дальность действия и уменьшить «мёртвую зону». Поставленная задача решается тем, что в способе обнаружения объектов, находящихся в толще донного грунта, и определения их местоположения, при котором с носителя гидролокационной аппаратуры излучают гидроакустическим излучателем в водную среду импульсный акустический сигнал, принимают приёмной системой отражённый от находящегося в толще донного грунта объекта акустический сигнал, перемещают носитель гидролокационной аппаратуры с гидроакустическим излучателем на расстоянии Z1 от дна, связанного с глубиной Z2 предполагаемого залегания объекта в толще донного грунта соотношением Z1=Z2/ρ12, измеряют время t от излучателя до находящегося в толще донного грунта объекта и от объекта до приёмной системы и отображают пространственно-временное положение объекта,
используют в качестве излучателя вертикально ориентированный направленный в вертикальной плоскости излучатель, вертикальный размер которого L1 связан с предполагаемым максимальным расстоянием до находящегося в толще донного грунта объекта R соотношением L12=λR,
используют в качестве приёмной системы горизонтально ориентированную направленную в горизонтальной плоскости антенну, горизонтальный размер которой L2 связан с пространственным разрешением δR в направлении движения носителя гидролокационной аппаратуры соотношением L2=1.2 λR/δR,
излучают акустический сигнал в траверсном направлении и вычисляют расстояние от излучателя до находящегося в толще донного грунта объекта по формуле
 ,
, 
В заявленном способе обнаружения объектов, находящихся в толще донного грунта, и определения их местоположения общими существенными признаками для него и для прототипа являются:
излучают акустическим излучателем в водную среду импульсный акустический сигнал,
принимают отражённый от объекта, находящегося в толще донного грунта, акустический сигнал,
измеряют время распространения акустического сигнала от излучателя до объекта и от объекта до приёмной антенны,
вычисляют расстояние до объекта,
перемещают носитель гидролокационной аппаратуры с излучателем над дном относительно предполагаемого местоположения объекта,
перемещают излучатель над дном на расстоянии Z1 от дна, связанного с глубиной Z2 предполагаемого залегания объекта в толще донного грунта соотношением Z1=Z2/ρ12,
отображают пространственно-временное положение объекта.
Отличительными признаками заявленного способа обнаружения объектов, находящихся в толще донного грунта, и определения их местоположения являются:
используют в качестве излучателя вертикально ориентированный направленный в вертикальной плоскости излучатель, вертикальный размер которого L1 связан с предполагаемым максимальным расстоянием до находящегося в толще донного грунта объекта R соотношением L12= λR,
используют в качестве приёмной системы горизонтально ориентированную направленную в горизонтальной плоскости антенну, горизонтальный размер которой L2 связан с пространственным разрешением δR в направлении движения носителя гидролокационной аппаратуры соотношением L2=1.2 λR/δR,
излучают акустический сигнал в траверсном направлении и вычисляют расстояние от излучателя до находящегося в толще донного грунта объекта по формуле
,
Данная совокупность общих и отличительных существенных признаков обеспечивает получение технического результата во всех случаях, на которые испрашивается правовая охрана. Именно такая совокупность существенных признаков заявленного способа позволила:
селективно возбуждать неоднородную волну пограничного типа (волну Брюстера), водная составляющая которой локализована на горизонте излучателя Z1, а грунтовая составляющая локализована на горизонте предполагаемого нахождения объекта Z2,
селективно принимать отражённую от объекта неоднородную волну пограничного типа направленной в горизонтальной плоскости приёмной антенной, расположенной на горизонте излучателя Z1,
увеличить дальность обнаружения объектов, находящихся в толще донного грунта, и обладающих малой отражающей способностью (силой цели) за счёт возможного увеличения рабочей частоты,
уменьшить «мёртвую зону» способа обнаружения за счёт исключения преломлённых волн, обратное отражение которых на границе вода-морское дно маскирует отражённый от объекта сигнал.
Следовательно, заявленное изобретение является новым, обладает изобретательским уровнем, т.к. не следует из известных технических решений и пригодно для использования.
Заявленный способ обнаружения объектов, находящихся в толще донного грунта, и определения их местоположения поясняется чертежами. На фиг.1 представлена схема расположения на носителе гидролокационной аппаратуры излучающей антенны А1 и приёмной антенны А2 относительно морского дна с объектом, находящимся в толще донного грунта. Фиг.2а поясняет структуру возбуждаемого вертикально ориентированной излучающей антенной А1 звукового поля, ближняя (прожекторная) зона которого, ограниченная размером R, является рабочей зоной обнаружения объектов, находящихся в толще донного грунта. Фиг.2б поясняет структуру неоднородной волны пограничного типа (волны Брюстера), селективно возбуждаемой в придонном слое. Её водная составляющая (1) локализована на горизонте расположения излучателя и приёмной антенны Z1, а грунтовая составляющая (2) локализована на горизонте предполагаемого местонахождения объекта в толще донного грунта Z2.
Заявленный способ реализуется следующим образом.
Вертикально ориентированный излучатель, расположенный на носителе гидролокационной аппаратуры, возбуждает своим комплексным угловым спектром (Б.А. Касаткин и др. Акустика мелкого моря в скалярно-векторном описании. Теория и эксперимент. Владивосток. 2019. С.9-15.) неоднородную волну Брюстера, которая селективно возбуждается на границе раздела вода-морское дно в пределах ближней (прожекторной) зоны излучателя. Водная составляющая этой волны, локализованная на горизонте источника, содержит вихревую составляющую вектора интенсивности, представленную на рисунке горизонтально ориентированной вихревой цепочкой, в которой все вихри вращаются в одну сторону (по часовой стрелке). Эта вихревая составляющая продолжается в донное полупространство, возбуждая там аналогичную вихревую цепочку в составе грунтовой составляющей волны Брюстера. Грунтовая составляющая волны Брюстера отражается от объекта, находящегося в толще донного грунта, и порождает, в силу принципа взаимности, водную составляющую, локализованную на горизонте расположения излучателя и приёмной антенны. Именно такой способ селективного возбуждения неоднородной волны Брюстера и селективного её приёма позволяет исключить другие типы волн, маскирующих сигнал, отражённый от объекта, находящегося в толще донного грунта, и исключить образование «мёртвой зоны».
В то же время, использование более высоких частот (в сравнении с прототипом) позволяет увеличить отражающую способность объекта (силу цели), сформировать достаточно протяжённую в траверсном направлении зону контроля и увеличить дальность обнаружения объектов, отражающая способность которых мала. Так, например, для R=20 м, δR=1 м, f=30 кГц (λ=0.05 м), основные параметры излучающей и приёмной антенн принимают вполне реализуемые значения L1=1 м, L2=1.2 м.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения объектов, находящихся в толще донного грунта, и определение их местоположения | 2017 |
|
RU2650842C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ТОЛЩЕ ДОННОГО ГРУНТА | 2004 |
|
RU2280266C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ТОЛЩЕ ДОННОГО ГРУНТА | 2009 |
|
RU2410721C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1997 |
|
RU2125278C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2011 |
|
RU2456635C1 |
| ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ ДВИЖУЩЕГОСЯ ЗАГЛУБЛЕННОГО ИСТОЧНИКА ЗВУКА И ИЗМЕРЕНИЯ ЕГО КООРДИНАТ В МЕЛКОМ МОРЕ | 2013 |
|
RU2537472C1 |
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ ПРИ ГИДРОЛОКАЦИИ | 2007 |
|
RU2358289C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2010 |
|
RU2452979C1 |
| Гидролокатор кругового обзора автономного необитаемого подводного аппарата | 2020 |
|
RU2754604C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2010 |
|
RU2452977C1 |
Изобретение относится к области гидроакустики и может быть использовано при разработке средств поиска объектов, находящихся в верхнем слое морского дна, и невидимых для таких гидролокационных средств, как гидролокатор бокового обзора. Согласно заявленному решению с носителя гидролокационной аппаратуры излучают гидроакустическим излучателем в водную среду импульсный акустический сигнал, принимают приёмной системой отражённый от находящегося в толще донного грунта объекта акустический сигнал, измеряют время t распространения акустического сигнала от излучателя до отражающего объекта и от отражающего объекта до приёмной системы. Перемещают носитель гидролокационной аппаратуры с гидроакустическим излучателем над дном на расстоянии от дна Z1, связанном с глубиной Z2 предполагаемого местонахождения объекта в толще донного грунта соотношением Z1=Z2/ρ12 (ρ12=ρ1/ρ2, ρ1, ρ2 - плотность воды и грунта соответственно). При этом используют в качестве излучателя вертикально ориентированный направленный в вертикальной плоскости излучатель, вертикальный размер которого L1 связан с предполагаемым максимальным расстоянием до находящегося в толще донного грунта объекта R соотношением L12=λR (λ-длина волны). Используют в качестве приёмной системы горизонтально ориентированную направленную в горизонтальной плоскости антенну, горизонтальный размер которой L2 связан с пространственным разрешением δR в направлении движения носителя гидролокационной аппаратуры соотношением L2=1.2 λR/δR. Излучают акустический сигнал в траверсном направлении и вычисляют расстояние от излучателя до находящегося в толще донного грунта объекта с использованием заранее определённой скорости распространения неоднородной волны пограничного типа (волны Брюстера). Технический результат - увеличение дальности обнаружения объектов, находящихся в толще донного грунта, отражающая способность (сила цели) которых мала, и уменьшение «мёртвой зоны» контроля, связанной с маскирующим действием сигналов, отражённых непосредственно от границы раздела вода-морское дно. 2 ил.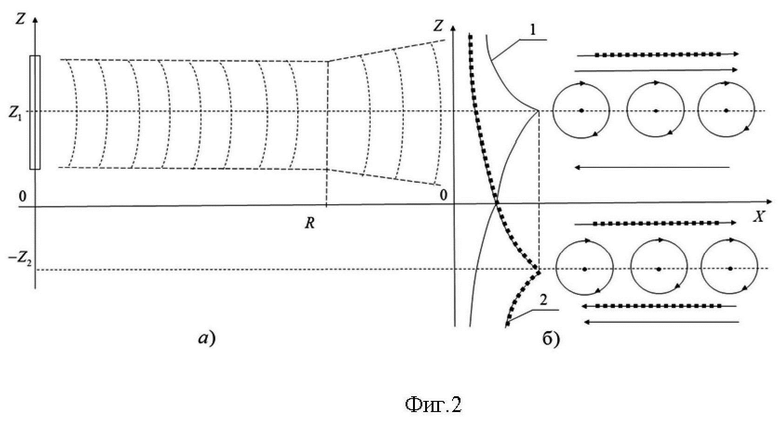
Способ определения расстояния до объекта, находящегося в толще донного грунта, при котором с носителя гидролокационной аппаратуры излучают гидроакустическим излучателем в водную среду импульсный акустический сигнал, принимают приёмной системой отражённый от находящегося в толще донного грунта объекта акустический сигнал, измеряют время t распространения акустического сигнала от излучателя до отражающего объекта и от отражающего объекта до приёмной системы, перемещают носитель гидролокационной аппаратуры с гидроакустическим излучателем над дном на расстоянии от дна Z1, связанном с глубиной Z2 предполагаемого местонахождения объекта в толще донного грунта соотношением Z1=Z2/ρ12 (ρ12=ρ1/ρ2, ρ1, ρ2 - плотность воды и грунта соответственно), и отображают пространственно-временное положение объекта, отличающийся тем, что используют в качестве излучателя вертикально ориентированный направленный в вертикальной плоскости излучатель, вертикальный размер которого L1 связан с предполагаемым максимальным расстоянием до находящегося в толще донного грунта объекта R соотношением L12=λR (λ - длина волны), используют в качестве приёмной системы горизонтально ориентированную направленную в горизонтальной плоскости антенну, горизонтальный размер которой L2 связан с пространственным разрешением δR в направлении движения носителя гидролокационной аппаратуры соотношением L2=1.2 λR/δR, излучают акустический сигнал в траверсном направлении и вычисляют расстояние от излучателя до находящегося в толще донного грунта объекта по формуле
 ,
, 
c12=c1/c2, c1, c2 - скорость звука в воде и грунте соответственно.
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ТОЛЩЕ ДОННОГО ГРУНТА | 2009 |
|
RU2410721C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ТОЛЩЕ ДОННОГО ГРУНТА | 2004 |
|
RU2280266C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2006 |
|
RU2311663C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1997 |
|
RU2125278C1 |
| JP 4408551 B2, 03.02.2010 | |||
| US 4229809 A, 21.10.1980. | |||

