Изобретение относится к области гидроакустики и океанотехники и может быть использовано при разработке средств поиска объектов, находящихся на дне под слоем грунта и невидимых для таких гидролокационных средств, как гидролокатор бокового обзора.
Известен способ обнаружения объекта, находящегося в толще донного грунта, который реализуется гидролокационным комплексом, содержащим гидролокатор бокового обзора, используемый на первом этапе работы, и акустический профилограф, который используется на втором этапе работы (Гидролокационный комплекс «Кедр», адрес сайта в Интернете http://www.ire.rssi.ru). В данном способе обнаружения объекта, находящегося в толще донного грунта, на первом этапе работы с носителя гидролокационной аппаратуры излучают антенной гидролокатора бокового обзора в водную среду импульсный акустический сигнал в широком диапазоне углов скольжения. Затем принимают от находящегося в толще донного грунта объекта отраженный в обратном направлении акустический сигнал той же акустической антенной, измеряют время t распространения акустического сигнала туда и обратно, вычисляют расстояние r до объекта, отображают пространственно-временное положение объекта, используя движение носителя гидролокационной аппаратуры относительно предполагаемого местоположения объекта, и визуально определяют на гидролокационном изображении дна, полученном с помощью гидролокатора бокового обзора, возможное местоположение объекта, находящегося в толще донного грунта. На втором этапе работы, используя движение носителя гидролокационной аппаратуры, повторно выходят на место предполагаемого расположения объекта, находящегося в толще донного грунта, излучают акустической антенной акустического профилографа в водную среду в сторону грунта импульсный акустический сигнал в вертикальном направлении. Затем принимают отраженный от находящегося в толще донного грунта объекта акустический сигнал той же акустической антенной, измеряют время t распространения туда и обратно акустического сигнала, вычисляют глубину Z объекта, находящегося в толще донного грунта, и отображают пространственно-временное положение объекта, находящегося в толще донного грунта, в вертикальной плоскости.
Недостатком такого способа обнаружения объекта, находящегося в толще донного грунта, является большая вероятность пропуска объектов, находящихся под слоем грунта, но не выходящих на поверхность дна. Другим недостатком является малая эффективность поиска, связанная с двухэтапным режимом поиска, т.е. с необходимостью использования акустического профилографа на втором этапе для повышения вероятности обнаружения объектов, находящихся в толще донного грунта.
Известен способ обнаружения объекта, находящегося в толще донного грунта, в котором акустическое зондирование верхнего слоя донного грунта осуществляют одновременно с зондированием поверхности морского дна локатором бокового обзора (Патент РФ №2280266 С2, МПК G01S 15/04, 2004 г.). Для этого на носителе гидролокационной аппаратуры устанавливают приемопередающую антенну гидролокатора бокового обзора и дополнительные направленные в вертикальной плоскости излучающую и приемную акустические антенны, работающие синхронно с приемопередающей антенной гидролокатора бокового обзора. Затем, перемещая носитель гидролокационной аппаратуры над дном, излучают приемопередающей антенной гидролокатора бокового обзора в водную среду в сторону дна импульсный акустический сигнал, принимают отраженный от объекта, находящегося в толще донного грунта, в обратном направлении акустический сигнал той же акустической антенной, измеряют время t распространения туда и обратно акустического сигнала и отображают пространственно-временное положение объекта. Синхронно с излучением антенны гидролокатора бокового обзора излучают в водную среду импульсный акустический сигнал дополнительной направленной в вертикальной плоскости антенной под углом падения
θиз=arcsin|(1-ρ2 12)0,5(1-ρ2 12C2 12)-0,5|,
где ρ12=ρ1/ρ2, C12=C1/C2, ρ1, ρ2, C1, С2 - плотность и скорость звука в воде и грунте соответственно,
принимают от находящегося в толще донного грунта объекта и переизлученный в водную среду акустический сигнал направленной в вертикальной плоскости дополнительной приемной акустической антенной под критическим углом приема θпр=arcsinC12, перемещают направленную в вертикальной плоскости дополнительную излучающую антенну на высоте Z1 над дном, связанной с глубиной Z2 предполагаемого местонахождения объекта в толще донного грунта соотношением Z1=Z2/ρ12 и вычисляют расстояние r до объекта по формуле

Данный способ обнаружения объекта, находящегося в толще донного грунта, является наиболее близким к заявляемому способу и принят за прототип.
Недостатком указанного способа является малая дальность действия. Это связано с тем, что грунтовая волна, которая возбуждается в составе придонной волны пограничного типа и используется в этом способе в качестве информативной составляющей, достаточно быстро затухает в донном грунте.
Задачей настоящего изобретения является разработка такого способа обнаружения объекта, находящегося в толще донного грунта, который при сохранении высокой разрешающей способности по дальности в угловом и траверсном направлениях позволяет увеличение дальности действия.
Поставленная задача решается тем, что в способе обнаружения объекта, находящегося в толще донного грунта, при котором с носителя гидролокационной аппаратуры излучают приемопередающей акустической антенной локатора бокового обзора в водную среду в сторону дна импульсный акустический сигнал, принимают отраженный от объекта, находящегося в толще донного грунта, в обратном направлении акустический сигнал той же акустической антенной, измеряют время t распространения туда и обратно акустического сигнала, вычисляют расстояние до объекта r, перемещают носитель гидролокационной аппаратуры с акустической антенной гидролокатора бокового обзора над дном относительно предполагаемого местонахождения объекта и отображают пространственно-временное положение объекта, устанавливают на носителе гидролокационной аппаратуры дополнительные излучающую и приемную акустические антенны и синхронно с излучением приемопередающей акустической антенной гидролокатора бокового обзора излучают в водную среду в сторону грунта импульсный акустический сигнал направленной в вертикальной плоскости дополнительной излучающей акустической антенной под углом падения
θиз=arcsin|(1-ρ2 12)0.5(1-ρ2 12C2 12)-0.5|
где ρ12=ρ1/ρ2, C12=C1/C2, ρ1, ρ2, C1, С2 - плотность и скорость звука в воде и грунте соответственно,
принимают отраженный от находящегося в толще донного грунта объекта и переизлученный в водную среду акустический сигнал направленной в вертикальной плоскости дополнительной приемной акустической антенной под критическим углом приема θпр=arcsinC12, перемещают направленную в вертикальной плоскости дополнительную излучающую акустическую антенну на высоте Z1, связанной с глубиной Z2 предполагаемого местонахождения объекта в толще грунта, соотношением Z1=Z2/ρ12, используют в качестве информативной составляющей водную волну, входящую в состав придонной волны пограничного типа, затухание которой существенно меньше, чем грунтовой. Для этого направленные в вертикальной плоскости дополнительные излучающую и приемную антенны выполняют приемоизлучающими антеннами, которые излучают и принимают отраженные от находящихся в толще грунта объектов акустические сигналы в направлениях θиз, θпр, а ширина характеристики направленности на уровне -3 дБ в окрестности каждого из максимумов θ1=θиз, θ2=θпр, равна Δθ0,7=(θиз-θпр)/4.
Затем после оцифровки принятого сигнала производят дополнительную обработку сигналов типа синтезирования апертуры, но для отражающего объекта, находящегося в толще донного грунта. С этой целью для каждой посылки импульсного сигнала из массива принятых данных формируют М элементов пространственного разрешения в интервале времен прихода отраженного акустического сигнала tm∈(t0, tMAX), m=1, 2, М, где  ,
,  ,
,  (C1, C2 - предварительно определенные эффективная скорость звука в воде и грунте,
(C1, C2 - предварительно определенные эффективная скорость звука в воде и грунте,  , Δf - полоса частот акустического сигнала, H=(Z1 2+R2)0.5, R - предполагаемая ширина полосы обзора морского дна в траверсном направлении), из М элементов - строк формируют матрицу из М×(2N+1) - элементов пространственного разрешения tmn, m∈(1,M); n∈(0,±N), для каждого элемента tmn вычисляют временные задержки
, Δf - полоса частот акустического сигнала, H=(Z1 2+R2)0.5, R - предполагаемая ширина полосы обзора морского дна в траверсном направлении), из М элементов - строк формируют матрицу из М×(2N+1) - элементов пространственного разрешения tmn, m∈(1,M); n∈(0,±N), для каждого элемента tmn вычисляют временные задержки

где ϑ - предварительно определенная скорость носителя гидролокационной аппаратуры, Т - период следования импульсов излучения, для каждого момента времени прихода принятых сигналов tm синфазно суммируют 2N+1 сигналов, сдвинутых назад по временной шкале на величину  повторяют операции временного сдвига и синфазного суммирования для всего массива данных n>N+1, m≤M.
повторяют операции временного сдвига и синфазного суммирования для всего массива данных n>N+1, m≤M.
Затем производят дополнительную обработку сигналов с целью компенсации временных искажений, связанных с двухлучевостью распространения акустических сигналов. С этой целью для того же массива временных задержек  и массива M×(2N+1) элементов пространственного разрешения вычисляют второй массив временных задержек
и массива M×(2N+1) элементов пространственного разрешения вычисляют второй массив временных задержек  для которого повторяется процедура временного сдвига на величину
для которого повторяется процедура временного сдвига на величину  и синфазного суммирования, для того же массива временных задержек
и синфазного суммирования, для того же массива временных задержек  и массива M×(2N+1) элементов пространственного разрешения вычисляют третий массив временных задержек
и массива M×(2N+1) элементов пространственного разрешения вычисляют третий массив временных задержек  для которого повторяется процедура временного сдвига на величину
для которого повторяется процедура временного сдвига на величину  и синфазного суммирования, причем временные задержки
и синфазного суммирования, причем временные задержки  вычисляются по формулам:
вычисляются по формулам:

а расстояние r вычисляют по формуле
В заявленном способе обнаружения объекта, находящегося в толще донного грунта, общими существенными признаками для него и для прототипа являются следующие действия:
- способ обнаружения объекта, находящегося в толще донного грунта;
- излучают приемопередающей акустической антенной гидролокатора бокового обзора в водную среду в сторону дна импульсный акустический сигнал;
- принимают отраженный от объекта, находящегося в толще донного грунта, в обратном направлении акустический сигнал той же акустической антенной гидролокатора бокового обзора;
- измеряют время t распространения туда и обратно акустического сигнала;
- вычисляют расстояния r до объекта;
- перемещают носитель гидролокационной аппаратуры с акустической антенной над дном относительно предполагаемого местоположения объекта;
- отображают пространственно-временное положение объекта;
- излучают дополнительной направленной в вертикальной плоскости акустической антенной под углом излучения θиз=arcsin|(1-ρ2 12)0,5(1-ρ2 12C2 12)-0,5|;
- принимают дополнительной направленной в вертикальной плоскости акустической антенной под критическим углом приема θпр=arcsinC12;
- перемещают направленную в вертикальной плоскости дополнительную излучающую акустическую антенну на высоте Z1, связанной с глубиной Z2 предполагаемого местонахождения объекта в толще грунта, соотношением Z1=Z2/ρ12.
Сопоставительный анализ существенных признаков заявленного способа обнаружения объекта, находящегося в толще донного грунта, и прототипа показывает, что первый, в отличие от прототипа, имеет следующие отличительные признаки:
- выполняют направленные в вертикальной плоскости дополнительные излучающую и приемную антенны приемоизлучающими антеннами, которые излучают и принимают отраженные от находящихся в толще грунта объектов акустические сигналы в направлениях θиз, θпр; а ширина характеристики направленности на уровне -3 дБ в окрестности каждого из максимумов θ1=θиз, θ2=θпр, равна Δθ0,7=(θиз-θпр)/4;
- для каждой посылки импульсного сигнала из массива принятых данных формируют М элементов пространственного разрешения в интервале времен прихода отраженного акустического сигнала tm∈(t0, tMAX), m=1, 2, М, где , , (C1, C2 - предварительно определенные эффективная скорость звука в воде и грунте, , Δf - полоса частот акустического сигнала, H=(Z1 2+R2)0.5, R - предполагаемая ширина полосы обзора морского дна в траверзном направлении);
- из М элементов - строк формируют матрицу из M×(2N+1)- элементов пространственного разрешения tmn, m∈(1,M); n∈(0,±N);
- для каждого элемента tmn вычисляют временные задержки

где ϑ - предварительно определенная скорость носителя гидролокационной аппаратуры, Т - период следования импульсов излучения, для каждого момента времени прихода принятых сигналов tm синфазно суммируют 2N+1 сигналов, сдвинутых назад по временной шкале на величину 
- повторяют операции временного сдвига и синфазного суммирования для всего массива данных n>N+1, m≤M;
- для того же массива временных задержек  и массива М×(2N+1) элементов пространственного разрешения вычисляют второй массив временных задержек
и массива М×(2N+1) элементов пространственного разрешения вычисляют второй массив временных задержек  для которого повторяется процедура временного сдвига на величину
для которого повторяется процедура временного сдвига на величину  и синфазного суммирования;
и синфазного суммирования;
- для того же массива временных задержек  и массива М×(2N+1) элементов пространственного разрешения вычисляют третий массив временных задержек
и массива М×(2N+1) элементов пространственного разрешения вычисляют третий массив временных задержек  для которого повторяется процедура временного сдвига на величину
для которого повторяется процедура временного сдвига на величину  и синфазного суммирования, причем временные задержки
и синфазного суммирования, причем временные задержки  вычисляются по формулам:
вычисляются по формулам:
расстояние r вычисляют по формуле
Данная совокупность общих и отличительных существенных признаков обеспечивает получение технического результата во всех случаях, на которые испрашивается правовая охрана. Именно такая совокупность существенных признаков позволила:
- обнаруживать любые объекты в толще донного грунта, даже если они не выходят на поверхность морского дна,
- повысить дальность обнаружения объектов при сохранении высокой разрешающей способности по дальности в угловом и траверсном направлениях;
- осуществлять отображение положения обнаруженных объектов, находящихся в толще донного грунта, в горизонтальной плоскости на материальных носителях.
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигнутым техническим результатом, т.е. благодаря данной совокупности существенных признаков изобретения стало возможным решить поставленную задачу.
Следовательно, заявленное изобретение является новым, обладает изобретательским уровнем, т.е. оно явным образом не следует из уровня техники и пригодно для использования.
Заявленный способ обнаружения объекта, находящегося в толще донного грунта, поясняется чертежом, где а) - представлена лучевая трактовка способа излучения и приема звуковых волн в придонном слое морского дна дополнительной приемоизлучающей антенной, при этом высота буксировки которой над дном Z1 связана с глубиной Z2 предполагаемого нахождения объекта соотношением Z1=Z2/ρ12, б) - обработка типа синтезирования апертуры, которая сводится к компенсации временных задержек  с последующим синфазным суммированием, и совмещенная с ней компенсация временных задержек
с последующим синфазным суммированием, и совмещенная с ней компенсация временных задержек 

Для реализации одновременного излучения и приема в направлении углов θ1=θиз, θ2=θпр достаточно независимые механически излучающую и приемную антенны, описанные в прототипе, объединить электрически в режимах излучения и приема.
Для осуществления заявленного способа обнаружения объекта, находящегося в толще донного грунта, в качестве носителя гидролокационной аппаратуры использовался необитаемый подводный аппарат, который перемещался по заданной программе над контролируемой поверхностью дна моря. Во время движения носителя приемопередающая антенна гидролокатора бокового обзора работает в штатном режиме, а после приема и обработки принятых сигналов позволяет отобразить положение всех обнаруженных объектов на горизонтальной плоскости, в том числе и объектов, расположенных в толще донного грунта, изображение которых ничем не отличается от изображения объектов, находящихся на поверхности дна. Синхронно с ней дополнительная направленная в вертикальной плоскости акустическая антенна излучает импульсный акустический сигнал под углами θ1=θиз=arcsin|(1-ρ2 12)0,5(1-ρ2 12C2 12)-0,5|, θ2=θпр=arcsinC12 и возбуждает в пограничной области морского дна придонную волну, амплитуда которой достигает максимального значения на горизонте Z2=p12Z1. Придонная волна представляет собой волну пограничного типа, которая, в свою очередь, состоит из трех элементарных волновых составляющих: водной волны, грунтовой волны и обобщенной придонной волны, соответствующей полюсу коэффициента отражения. Составляющая типа обобщенной придонной волны возбуждается наиболее эффективно при угле падения θ1=θиз=arcsin|(1-ρ2 12)0,5(1-ρ2 12C2 12)-0,5|, грунтовая составляющая возбуждается наиболее эффективно при угле падения θ2=θпр=arcsinC12, а водная волна в широком диапазоне углов падения присутствует в излучении акустической антенны гидролокатора бокового обзора. Таким образом, при предлагаемом способе возбуждения придонная волна возбуждается наиболее эффективно по всем трем своим составляющим.
Придонная волна, распространяясь в верхнем слое донного грунта, отражается от расположенных в нем объектов и принимается дополнительной направленной в вертикальной плоскости приемопередающей акустической антенной под углами приема θ1=θиз=arcsin|(1-ρ2 12)0,5(1-ρ2 12C2 12)-0,5 и θ2=θпр=arcsinC12. Различие лучевых траекторий для лучей, распространяющихся от дополнительной акустической антенны до объекта, находящегося в толще донного грунта, и обратно приводит к тому, что отраженные от него сигналы образуют тройку импульсов (триплет), сдвинутых друг относительно друга на величину  Этот отличительный признак характерен только для сигналов, отраженных от объектов, находящихся в толще донного грунта. С учетом этого принятые сигналы подвергаются двухэтапной обработке.
Этот отличительный признак характерен только для сигналов, отраженных от объектов, находящихся в толще донного грунта. С учетом этого принятые сигналы подвергаются двухэтапной обработке.
На первом этапе производят обработку сигналов типа синтезирования апертуры с компенсацией временных задержек  связанных с движением носителя гидроакустической аппаратуры и слабой направленностью в горизонтальной плоскости дополнительной акустической антенны, направленной только в вертикальной плоскости. На втором этапе производят дополнительную обработку сигналов с целью компенсации временных искажений, связанных с многолучевостью, приводящей к образованию триплетов. Обработка типа синтезирования апертуры, которая сводится к компенсации временных задержек
связанных с движением носителя гидроакустической аппаратуры и слабой направленностью в горизонтальной плоскости дополнительной акустической антенны, направленной только в вертикальной плоскости. На втором этапе производят дополнительную обработку сигналов с целью компенсации временных искажений, связанных с многолучевостью, приводящей к образованию триплетов. Обработка типа синтезирования апертуры, которая сводится к компенсации временных задержек  с последующим синфазным суммированием, и совмещенная с ней компенсация временных задержек
с последующим синфазным суммированием, и совмещенная с ней компенсация временных задержек 
 поясняются фиг.1б).
поясняются фиг.1б).
Таким образом, в предлагаемом изобретении дальность действия способа обнаружения объектов, находящихся в толще донного грунта, увеличена за счет более эффективного возбуждения придонной волны, а также за счет того, что в качестве информативной составляющей используется не грунтовая составляющая, а водная, затухание которой существенно меньше. Использование алгоритмов обработки типа синтезирования апертуры и компенсации многолучевости в предлагаемом способе обнаружения объектов, находящихся в толще донного грунта, позволяет сохранить высокую разрешающую способность способа и при увеличенной дальности действия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ТОЛЩЕ ДОННОГО ГРУНТА | 2004 |
|
RU2280266C2 |
| Способ определения расстояния до объекта, находящегося в толще донного грунта | 2023 |
|
RU2815192C1 |
| Способ обнаружения объектов, находящихся в толще донного грунта, и определение их местоположения | 2017 |
|
RU2650842C1 |
| Гидролокатор кругового обзора автономного необитаемого подводного аппарата | 2020 |
|
RU2754604C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1997 |
|
RU2125278C1 |
| СИСТЕМА И СПОСОБ 3D ИССЛЕДОВАНИЯ МОРСКОГО ДНА ДЛЯ ИНЖЕНЕРНЫХ ИЗЫСКАНИЙ | 2015 |
|
RU2608301C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2011 |
|
RU2456635C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2006 |
|
RU2311663C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2006 |
|
RU2313802C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2006 |
|
RU2311662C1 |
Способ обнаружения объектов, находящихся в толще донного грунта, может быть использован при разработке средств поиска объектов, находящихся на дне под слоем грунта и невидимых для таких гидролокационных средств, как гидролокатор бокового обзора. Технический результат заключается в увеличенной дальности действия при высокой разрешающей способности. В предложенном способе дальность обнаружения объектов, находящихся в толще донного грунта, увеличена за счет более эффективного возбуждения придонной волны, а также за счет того, что в качестве информативной составляющей используется не грунтовая составляющая, а водная, затухание которой существенно меньше. Использование алгоритмов обработки типа синтезирования апертуры и компенсации многолучевости в предложенном способе обнаружения объектов, находящихся в толще донного грунта, позволяет сохранить высокую разрешающую способность способа и при увеличенной дальности действия. 1 ил.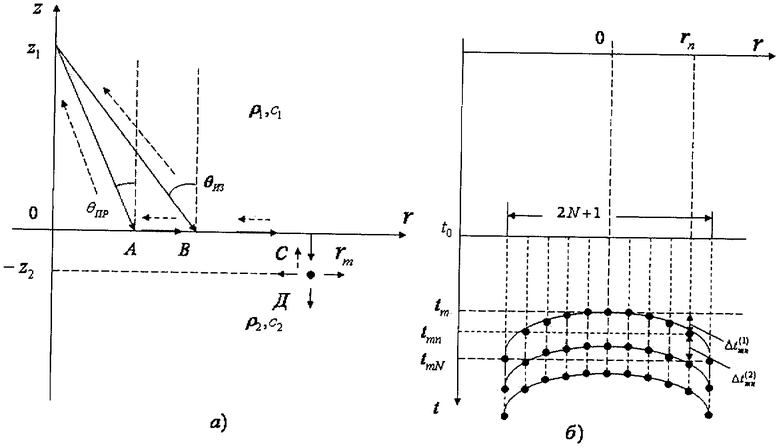
Способ обнаружения объектов, находящихся в толще донного грунта, при котором с носителя гидролокационной аппаратуры излучают приемопередающей акустической антенной гидролокатора бокового обзора в водную среду в сторону дна импульсный акустический сигнал, принимают отраженный от объекта, находящегося в толще донного грунта, в обратном направлении акустический сигнал той же акустической антенной, измеряют время t распространения туда и обратно акустического сигнала, вычисляют расстояние до объекта r, перемещают носитель гидролокационной аппаратуры с акустической антенной гидролокатора бокового обзора над дном относительно предполагаемого местонахождения объекта и отображают пространственно-временное положение объекта, устанавливают на носителе гидролокационной аппаратуры дополнительные излучающую и приемную акустические антенны и синхронно с излучением приемопередающей акустической антенной гидролокатора бокового обзора излучают в водную среду в сторону грунта импульсный акустический сигнал направленной в вертикальной плоскости дополнительной излучающей акустической антенной под углом падения
Θиз=arcsin/(1-ρ2 12)0,5(1-ρ2 12C2 12)-0,5|
где ρ12=ρ1/ρ2, C12=C1/C2, ρ1, ρ2, C1, C2 - плотность и скорость звука в воде и грунте соответственно,
принимают отраженный от находящегося в толще донного грунта объекта и переизлученный в водную среду акустический сигнал направленной в вертикальной плоскости дополнительной приемной акустической антенной под критическим углом приема θпр=arcsinC12, перемещают направленную в вертикальной плоскости дополнительную излучающую акустическую антенну на высоте Z1, связанной с глубиной Z2 предполагаемого местонахождения объекта в толще грунта, соотношением Z1=Z2/ρ12, отличающийся тем, что направленные в вертикальной плоскости дополнительные излучающую и приемную антенны выполняют приемоизлучающими антеннами, которые излучают и принимают отраженные от находящихся в толще грунта объектов акустические сигналы в направлениях θиз, θпр, а ширина характеристики направленности на уровне - 3 дБ в окрестности каждого из максимумов θ1=θиз, θ2=θпр равна Δθ0,7=(θиз-θпр)/4, после оцифровки принятого сигнала для каждой посылки импульсного сигнала из массива принятых данных формируют М элементов пространственного разрешения в интервале времен прихода отраженного акустического сигнала tm∈(t0, tMAX), m=1,2, М, где , , (C1, C2 - предварительно определенные эффективная скорость звука в воде и грунте, , Δf - полоса частот акустического сигнала, H=(Z1 2+R2)05, R - предполагаемая ширина полосы обзора морского дна в траверзном направлении), из М элементов - строк формируют матрицу из M×(2N+1) - элементов пространственного разрешения tmn, m∈(1,M); n∈(0,±N), для каждого элемента tmn вычисляют временные задержки

где ϑ - предварительно определенная скорость носителя гидролокационной аппаратуры, Т - период следования импульсов излучения, для каждого момента времени прихода принятых сигналов tm синфазно суммируют 2N+1 сигналов, сдвинутых назад по временной шкале на величину  , повторяют операции временного сдвига и синфазного суммирования для всего массива данных n>N+1, m≤M, для того же массива временных задержек
, повторяют операции временного сдвига и синфазного суммирования для всего массива данных n>N+1, m≤M, для того же массива временных задержек  и массива M×(2N+1) элементов пространственного разрешения вычисляют второй массив временных задержек
и массива M×(2N+1) элементов пространственного разрешения вычисляют второй массив временных задержек  , для которого повторяется процедура временного сдвига на величину
, для которого повторяется процедура временного сдвига на величину  и синфазного суммирования, для того же массива временных задержек и массива M×(2N+1) элементов пространственного разрешения вычисляют третий массив временных задержек
и синфазного суммирования, для того же массива временных задержек и массива M×(2N+1) элементов пространственного разрешения вычисляют третий массив временных задержек  для которого повторяется процедура временного сдвига на величину
для которого повторяется процедура временного сдвига на величину  и синфазного суммирования, причем временные задержки вычисляются по формулам:
и синфазного суммирования, причем временные задержки вычисляются по формулам:
 ,
,
а расстояние r вычисляют по формуле
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ТОЛЩЕ ДОННОГО ГРУНТА | 2004 |
|
RU2280266C2 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ НАБЛЮДАЕМОГО ОБЪЕКТА ПО ГЛУБИНЕ В ВОДНОЙ СРЕДЕ | 2007 |
|
RU2343502C2 |
| ЭХОЛОКАТОР ДЛЯ ПОИСКА ОБЪЕКТОВ ВБЛИЗИ ДНА, НА ДНЕ И В ПРИПОВЕРХНОСТНОМ СЛОЕ ДНА | 1999 |
|
RU2149424C1 |
| WO 2005029116 A2, 31.03.2005 | |||
| JP 10186048 A, 14.07.1998. | |||

