Настоящее изобретение относится к способам обеспечения пожарной безопасности в помещении пожароопасных объектов, служащих для определения местоположения очага пожара с достоверностью до зоны возгорания и может быть использовано в системах информационной поддержки пожарной безопасности, для более быстрой и эффективной локализации и ликвидации пожара.
Известна «Система контроля пожарной опасности» (RU № 26430 U1, A62C 37/00, A62C 37/10, опубл.10.12.2002), включающая связанные между собой шлейфами датчики, подключенные к панели контроля, отличающаяся тем, что она дополнительно содержит центральный прибор и групповые приборы, датчики выполнены в виде аналоговых датчиков, каждый из которых содержит адресный модуль, при этом датчики связаны между собой и с групповыми приборами кольцевыми шлейфами так, что каждый шлейф снабжен отдельным групповым прибором, а каждый датчик снабжен отсекателем короткозамкнутых участков соответствующего шлейфа, при этом центральный прибор связан с групповыми приборами с панелью контроля.
Также известен «Способ автоматического обнаружения начальных стадий пожаров в помещениях пожароопасных объектов, содержащих тепловыделяющее оборудование» (RU № 2646204, G08B 17/00, G08B 17/12, опубл.01.03.2018), заключающийся в циклическом определении значений контролируемых параметров опасных факторов пожара, сравнении полученных результатов с заданными предельно допустимыми значениями и сигнализации о пожаре, в случае достижения этих значений, отличающийся тем, что с целью обнаружения пожара на начальной стадии его развития все множество контролируемых на объекте физических параметров объединяют в группы, каждая из которых характеризует процессы возникновения и развития пожара в конкретном помещении, при этом каждому контролируемому параметру в группе присваивают порядковый номер и на каждом цикле контроля из полученных значений параметров в соответствии с их порядковыми номерами формируют численные ряды, которые запоминают и на последующих циклах контроля сравнивают с вновь сформированным численным рядом, который в случае несовпадения также запоминают для последующего сравнения, при этом запоминание новых численных рядов производят в первоначальный период обучения и самонастройки или периодически в течение времени, за которое изменения контролируемых параметров достигают максимально возможных значений, но не превышают предельно допустимых значений, а после окончания периода обучения и самонастройки, при появлении численного ряда, отличного от запомненных, сигнализируют о возникновении начальной стадии пожара в помещении.
Также известен «Способ обнаружения пожара и интеллектуальная станция управления для осуществления способа» (RU № 2344859, А62С 3/00, G08B 17/00, опубл. 27.01.2009), который состоит в постоянном выделении факторов пожарной опасности среды контролируемого объекта, преобразовании выделенных факторов в массив оцифрованных данных, сопоставлении этого массива данных с массивом априорных данных, классификации полученных результатов сопоставления в соответствии с экстремумами и выработке, в зависимости от класса опасности, управляющего сигнала. Интеллектуальная станция управления содержит корпус с последовательно расположенными в нем аспирационным устройством, процессором, прибором управления, узлом исполнительных органов и каналом пожаротушения, причем аспирационное устройство состоит из последовательно расположенных входного трубопровода, термодатчика, вентилятора, фильтра грубой очистки от пыли, фильтра тонкой очистки от пыли, модуля датчиков, выхлопного трубопровода, а процессор содержит блок аналого-цифровых преобразователей, блок функциональных измерений и корреляций, блок управления и программирования
В качестве существенного недостатка указанных способов следует указать необходимость выполнения большого комплекса предварительных работ по анализу каждого контролируемого объекта, отсутствие оптимизации определения координат местоположения очага пожара и оптимизации расположения датчиков, и отсутствие автоматической адаптации системы к параметрам объекта.
Наиболее близким техническим решением заявленного изобретения является порядок измерения параметров пожара мультикритериальным и пожарными датчиками системы пожарной сигнализации, представленный в описании патента на полезную модель «Судовое устройство определения источника пожара мультикритериальным пожарным извещателем с использованием нейронного классификатора» (№198734, G08B 19/00, опубл. 27.01.2009) предназначенный для передачи на микроконтроллер аналогово-цифрового преобразователя сигнала о типе источника пожара.
Недостатком мультикритериальных пожарных извещателей является то, что они выдают малоинформативный, полученный с использованием пороговой обработки, дискретный сигнал, что не позволяет с достаточной точностью локализовать источник и определять тип источника пожара.
Техническим результатом заявляемого изобретения является повышение надежности определения местоположения очага пожара с достоверностью до зоны очага пожара, что позволяет быстрее и эффективнее определять факт пожара, локализировать и ликвидировать источник пожара в помещении пожароопасных объектов.
Технический результат заявляемого изобретения достигается в предложенном способе определения местоположения очага пожара с использованием многослойного рекуррентного персептрона (МРП), использующем результаты измерения факторов пожара, в котором, в отличие от прототипа, для измерения факторов пожара используют многопараметрические пожарные датчики системы пожарной сигнализации, которые размещают в помещении с применением генетического алгоритма, все измерения температуры, оптической плотности, концентрации угарного газа воздушной среды и координаты расположения многопараметрических пожарных датчиков вводят в МРП, обучение и валидацию МРП проводят с применением моделирования пожара. В данном способе вместо пороговых сигналов мультикритериальных датчиков используют непрерывные цифровые сигналы многопараметрических датчиков, что дает возможность учитывать корреляционные зависимости между параметрами – факторами пожара, введение полученной цифровой информации от датчиков в МРП позволяет накапливать данные, обучающие нейронную сеть, также для оптимального расположения многопараметрических датчиков применяют генетический алгоритм.
Для определения координат местоположения очага пожара используют МРП с тремя слоями, содержащую в двух скрытых слоях восемь и пять нейронов, в выходном слое два нейрона с набором функций активации - гиперболический тангенс и методом обучения с обратным распространением ошибки во времени на все слои нейронной сети. Функция активации - гиперболический тангенс является всюду дифференцируемой активационной функцией и подходит для сетей с обратным распространением. По сравнению с другими распространёнными функциями активации эта функция показывает меньший процент ошибки.
Валидацию работы нейронной сети проводят путем моделирования помещения с расстановкой источников пожара. Моделирование пожара проводят с использованием симулятора динамики пожара (FDS), который создает цифрового двойника пожара. Цифровой двойник пожара имеет ряд преимуществ перед натурной моделью пожара: безопасность, низкую стоимость, большой охват пожаром площади помещений.
Нейронная сеть представлена в виде многослойного персептрона.
Совокупность перечисленных выше существенных признаков увеличивает достоверность определения очага пожара.
На прилагаемых к описанию иллюстрациях представлено:
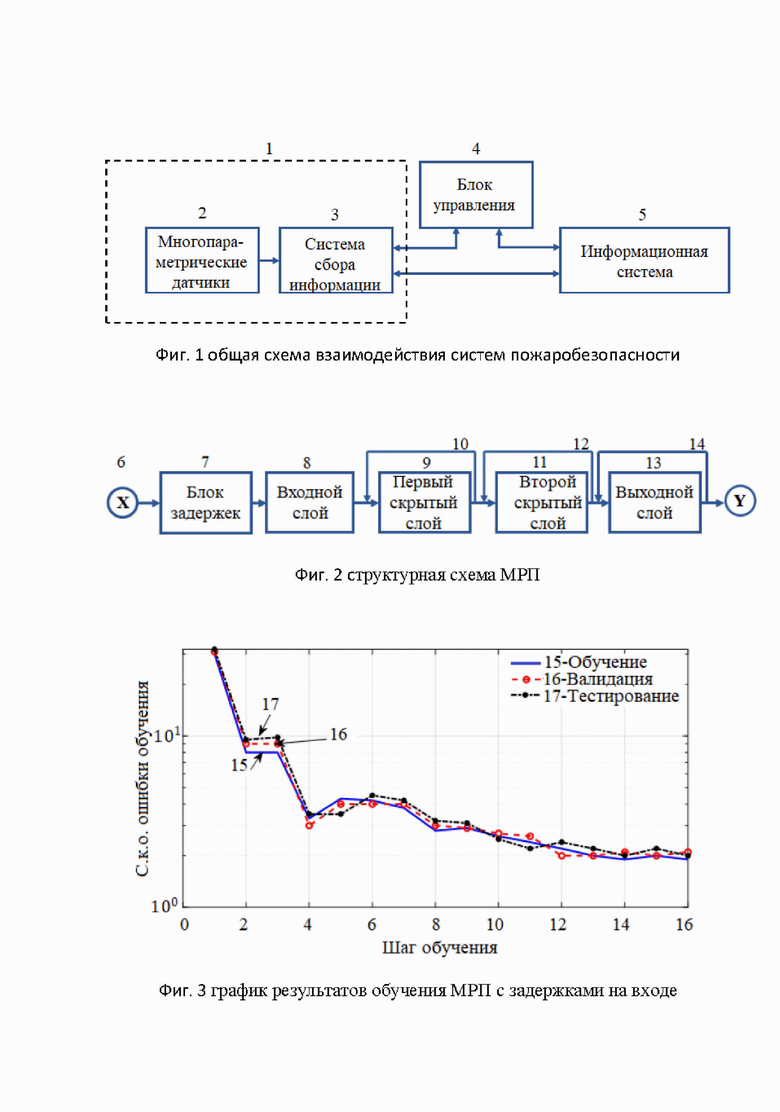
Фиг.1 – общая схема взаимодействия систем пожаробезопасности, состоящая из: 1 – блок сбора информации с многопараметрических датчиков, 2 – многопараметрические датчики, 3 – система сбора информации, 4 – блок управления, 5 – информационная система.
Фиг.2 – структурная схема МРП, состоящая из: 6 – сигналы с выхода многопараметрических датчиков, 7 – блок задержек, 8 – входной слой, 9 – первый скрытый слой, 10 – обратная связь первого скрытого слоя, 11 – второй скрытый слой, 12 – обратная связь второго скрытого слоя, 13 – выходной слой, 14 – обратная связь выходного слоя.
Фиг.3 – график результатов обучения МРП с задержками на входе, где 15 – график обучения, 16 – график валидации, 17 – график тестирования.
Фиг.4 – схема расположения источников пожара в моделируемом помещении, где 18, 19, 20, 21, 22 – источники пожара.
Фиг.5 – схема определения зоны пожара, где 18, 19, 20, 21, 22 – источники пожара, 23, 24, 25, 26, 28 – очаги пожара, точками, цветов соответствующим номерам очагов пожара, показаны результаты работы нейронной сети по определению места очага пожара.
Способ определения местоположения очага пожара с использованием многослойного рекуррентного персептрона представлен на общей схеме взаимодействия систем пожаробезопасности (Фиг. 1), где показана структурная схема противопожарной системы, которая включает блок сбора информации с многопараметрических датчиков 1, состоящий из многопараметрических пожарных датчиков 2 и системы сбора информации 3, блока управления 4 и информационной системы 5, которая содержит блок нейронной сети.
Блок нейронной сети показан на Фиг.2. Нейронная сеть представляет собой многослойный рекуррентный персептрон с задержками на входе. Сигналы с выхода многопараметрических датчиков 6 проходят через блок задержек 7. Блок задержек 7 формирует на выходе в дискретный момент времени вектор измерения q факторов пожара, измеренных одним многопараметрическим датчиком, , в моменты времени Входной слой 8 определяет вектор сигналов с задержками, полученными от всех многопараметрических датчиков, расположенных в позициях p=1,…,m, где , – количество позиций многопараметрических датчиков в контролируемом помещении. Входной слой представлен вектором:
который дополнен вектором координат многопараметрических датчиков:
Число узлов входного слоя определяется по формуле:
где – количество многопараметрических датчиков противопожарной системы, – количество измеряемых каждым датчиком факторов пожара, – количество временных задержек на входе нейронной сети, – число координат расположения датчиков, . Первый скрытый слой 9 МРП имеет восемь полно-связных нейронов с активационной функцией
где ν – выходной сигнал сумматора нейрона, характеризующий его локальное поле, e ≈ 2,71828 – математическая константа. Первый скрытый слой имеет обратную связь первого скрытого слоя 10. Второй скрытый слой 11 МРП имеет пять полно-связных нейронов с активационной функцией, определяемой по формуле (4) и обратную связь второго скрытого слоя 12. Выходной слой 13 содержит два нейрона и обратную связь выходного скрытого слоя 14. Выходной слой формирует сигнал Y, который определяет координаты местоположения очага пожара.
Обучение МРП выполняют методом Левенберга-Маркварда обратного распространения ошибок по времени в режиме реального времени. Для обучения нейронной сети применяют два типа данных. Данные первого типа получают путем моделирования пожара с использованием симулятора динамики пожара (FDS), который создает цифрового двойника пожара. Цифровой двойник пожара имеет ряд преимуществ перед натурной моделью пожара: безопасность, низкую стоимость, большой охват пожаром площади помещений. Данные второго типа получают в результате огневых стендовых испытаний, например, в ООО «НПО «Пожарная автоматика сервис» в г. Шуя или в ФГУП «Крыловский государственный научный центр».
Предложенный способ определения местоположения очага пожара с использованием многослойного рекуррентного персептрона включает следующие действия:
1. Создание цифровой модели – двойника развития пожара в помещении или выполнение огневых стендовых испытаний.
2. Определение плана оптимального расположения многопараметрических датчиков в контролируемом помещении.
3. Получение данных многопараметрических датчиков, размещенных в оптимальных позициях в помещении на заданной высоте.
4. Обучение МРП методом обратного распространения во времени.
5. Валидация нейронной сети с использованием новых данных, не использованных при обучении.
6. Применение обученной нейронной сети при определении местоположения источника пожара.
Пример 1. Выбирают многопараметрические датчики, измеряющие факторы пожара: температуру, концентрацию монооксида углерода и концентрацию дыма. Датчики устанавливают в оптимальные позиции, рассчитанные с применением генетического алгоритма. С использованием симулятора динамики пожара (FDS) получают результаты измерения факторов пожара в координатах установки датчиков.
Конструируют МРП с задержками на входе и выполняют его обучение во времени по методу Левенберга-Маркварда. На Фиг. 3 показаны следующие графики зависимостей среднеквадратической ошибки (с.к.о.) от номера шага обучения: график обучения 15, график проверки (валидации) обучения 16 и график тестирования 17. Зависимость показывает, что уже на шестнадцатом шаге обучения было достигнуто обучение МРП.
На Фиг. 4 показано моделируемое помещение с отмеченными источниками пожара 18, 19, 20, 21, 22. Габариты помещения: составляют 7м в длину и 5м в ширину. В таблице 1 указаны координаты источников пожара, отсчитанные от точки 23 (см. Фиг.4).
При оптимальном расположении многопараметрических датчиков на Фиг. 5 показаны области, размеченные с помощью МРП как зоны, где произошло возгорание. В таблице 2 показаны номера очагов пожара и соответствующие им номера эллипсов.
На Фиг.5 представлено расположение очагов пожара 18, 19, 20, 21, 22 с отмеченными зонами локализации пожара в виде проекции на плоскость плана помещения. Для определения способности нейронной сети локализовать очаг пожара было выполнено многократное компьютерное моделирование возгорания разных горючих материалов (кабеля, бумаги, бензина, спиртосодержащих веществ и бытовых отходов) и определение места очага пожара. Точками на Фиг.5 показаны результаты определения места очага пожара, эллипсами – зоны 24, 25, 26, 27, 28, характеризующие точность локализации очага пожара при разных источниках пожара.
Вероятность правильного определения очага пожара, составляет 92%. Для включения автоматических систем пожаротушения в больших помещениях, такой размер областей пожара является вполне удовлетворительным.
Нейронную сеть обучают в среде пакета Matlab R2019a. Обученная нейронная сеть распознает место пожара, начиная с пятой секунды пожара, так как она отслеживает тенденцию возрастания факторов пожара: температуры, видимости и концентрации угарного газа воздушной среды, измеряемых многопараметрическими датчиками. Кроме того, в качестве входных параметров нейронной сети передают координаты многопараметрических датчиков, с которых получают данные. Так как в экспериментах многопараметрические датчики расположены на одной высоте, использованы две координаты (расположение по длине и по ширине помещения). МРП имеет 51 элемент входного слоя (по пять отсчетов трех измеряемых параметров подают с выхода каждого из трех датчиков и дополнительно шесть параметров координат датчиков). Выходной слой МРП имеет два выходных параметра, которые являются результатом определения координат очага пожара по ширине и длине помещения.
При выполнении типовых пожарных испытаний используется программа визуализации работы многопараметрических датчиков, которая отображает динамику изменения контролируемых параметров и фиксирует их относительные значения при срабатывании многопараметрического алгоритма обнаружения пожара. Такое решение позволяет обеспечить повышение информативности системы пожарной сигнализации с многопараметрическими датчиками, тем самым быстрее и эффективнее локализовать и ликвидировать пожар.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРИНЯТИЯ РЕШЕНИЙ ПРИ УГРОЗЕ И ЛИКВИДАЦИИ ПОСЛЕДСТВИЙ ЧС | 2022 |
|
RU2796623C1 |
| СПОСОБ МНОГОФАКТОРНОГО КОНТРОЛЯ ПОЖАРНОЙ ОПАСНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2692926C1 |
| СПОСОБ КОНТРОЛЯ ПОЖАРНОЙ ОПАСНОСТИ В ПОМЕЩЕНИИ | 2024 |
|
RU2839526C1 |
| АНАЛОГОВАЯ АППАРАТНАЯ РЕАЛИЗАЦИЯ НЕЙРОННЫХ СЕТЕЙ | 2020 |
|
RU2796649C2 |
| СПРИНКЛЕРНАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ И СПОСОБ ЭКСПЛУАТАЦИИ УКАЗАННОЙ УСТАНОВКИ | 2015 |
|
RU2640476C2 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОГО ПРОГНОЗИРОВАНИЯ ВЕРОЯТНОСТИ ВОЗНИКНОВЕНИЯ ПРИРОДНЫХ ПОЖАРОВ | 2023 |
|
RU2832688C1 |
| ГЕНЕРАТОРЫ ИЗОБРАЖЕНИЙ С УСЛОВНО НЕЗАВИСИМЫМ СИНТЕЗОМ ПИКСЕЛЕЙ | 2021 |
|
RU2770132C1 |
| СПОСОБ ОБНАРУЖЕНИЯ В ПОМЕЩЕНИИ ВОЗГОРАНИЙ, ОПРЕДЕЛЕНИЯ ТИПА ГОРЮЧЕГО МАТЕРИАЛА, ПРИЧИНЫ ЕГО ВОЗГОРАНИЯ И ВЫРАБОТКИ РЕКОМЕНДАЦИЙ ПО ТУШЕНИЮ | 2023 |
|
RU2829210C1 |
| СПОСОБ И СИСТЕМА ПРЕДОТВРАЩЕНИЯ ВРЕДОНОСНЫХ АТАК НА СЕТЕВУЮ ИНФРАСТРУКТУРУ С ПРИМЕНЕНИЕМ КАСКАДОВ САМООБУЧАЮЩИХСЯ НЕЙРОННЫХ СЕТЕЙ | 2024 |
|
RU2841480C1 |
| Способ управления режимами работы добывающих и нагнетательных скважин нефтяного месторождения и многослойная циклическая нейронная сеть | 2020 |
|
RU2752779C1 |

Настоящее изобретение относится к способам обеспечения пожарной безопасности в помещении пожароопасных объектов. Техническим результатом заявленного решения является уменьшение ошибки определения местоположения очага пожара с достоверностью до зоны очага пожара и уменьшение времени, затрачиваемого оборудованием на обнаружение очага пожара. Технический результат достигается тем, что определяют местоположение очага пожара с использованием многослойного рекуррентного персептрона, при этом для измерения факторов пожара используют многопараметрические пожарные датчики системы пожарной сигнализации, которые размещают в помещении с применением генетического алгоритма, все измерения температуры, оптической плотности, концентрации угарного газа воздушной среды и координаты расположения многопараметрических пожарных датчиков вводят в многослойный рекуррентный персептрон, при этом обучение многослойного рекуррентного персептрона проводят методом Левенберга-Маркварда и валидацию многослойного рекуррентного персептрона проводят с применением моделирования пожара, затем с помощью обученной нейронной сети производят определение местоположения источника пожара. 5 ил.
Способ определения местоположения очага пожара с использованием многослойного рекуррентного персептрона, использующий результаты измерения факторов пожара, при этом для измерения факторов пожара используют многопараметрические пожарные датчики системы пожарной сигнализации, которые размещают в помещении с применением генетического алгоритма, все измерения температуры, оптической плотности, концентрации угарного газа воздушной среды и координаты расположения многопараметрических пожарных датчиков вводят в многослойный рекуррентный персептрон, отличающийся тем, что обучение многослойного рекуррентного персептрона проводят методом Левенберга-Маркварда и валидацию многослойного рекуррентного персептрона проводят с применением моделирования пожара, затем с помощью обученной нейронной сети производят определение местоположения источника пожара.
| ГУСЕВА А.И.: "Использование нейросетевой модели обработки данных в системах обнаружения пожаров для определения места возгорания", журнал Морские Интеллектуальные технологии 2(44) т2 2019 стр.93, 2019, Найдено в сети Интернет URL http://morintex.ru/wp-content/files_mf/1559896461MITVOL44No2PART22019.pdf | |||
| DANIL V | |||
| PROKHOROV: "Object Recognition in |
