Изобретение относится к области радиотехники, а именно, к системам, использующим отражение или вторичное излучение радиоволн, и может найти применение в системах дистанционного зондирования с получением высокодетализированных изображений земной поверхности.
В настоящее время широко используются радиолокационные системы, предназначенные для дистанционного зондирования земной поверхности с орбитальной платформы (искусственного спутника Земли).
Известна связка спутников ФРГ «TerraSAR-X/TanDEM-Х» для дистанционного зондирования Земли ([1] - Кантемиров Ю. Обзор современных радарных данных ДЗЗ // Геоматика. 2012. №1. С. 18-21.), где каждый спутник связки имеет аппаратурный отсек с датчиками, бортовую вычислительную систему, исполнительные органы и полезную нагрузку ([2] - Микрин Е. Бортовые комплексы управления космических аппаратов. Москва: Издательство МГТУ им. Н.Э. Баумана, 2014. Вып. 1).
Недостатком этой системы является недостаточная точность выделения предметов на поверхности Земли, так как при спутниковом зондировании точность выделения предметов на поверхности Земли в обзорном режиме составляет до 16 метров в зависимости от расстояния группировки до объекта зондирования и от технических характеристик используемых радиолокационных систем ([3] - Рис У. Основы дистанционного зондирования. Москва: Техносфера, 2006. Вып. 2).
Известен способ получения радиолокационного изображения земной поверхности при помощи многопозиционной радиолокационной системы с синтезированной апертурой антенны ([4] - патент РФ №2278398 «Способ получения радиолокационного изображения земной поверхности при помощи многопозиционной радиолокационной системы с синтезированной апертурой антенны» с приоритетом от 06.07.2004, МПК G01S 13/90, опубл. 20/06/2006).
Недостатком способа и описанного в указанном патенте устройства является необходимость одновременного приема и обработки прямого и отраженного сигналов N передатчиков на борту одного или нескольких приемников, когда в качестве передатчиков используются, например, космические аппараты спутниковых радионавигационных систем типов ГЛОНАСС, GPS, или аппараты спутниковой связи с антеннами широко направленного излучения. Такие аппараты - передатчики, как правило, не предназначены для зондирования земной поверхности и обработка в приемнике их сигналов, отраженных от земной поверхности, затруднительна для построения карт рельефа земной поверхности с высокой точностью и селекции целей. Сам приемник прямого зондирования земной поверхности не осуществляет.
Известен способ получения радиолокационного изображения земной поверхности при помощи многопозиционной радиолокационной системы с синтезированной апертурой ([5] - «Радиолокационные станции обзора Земли»/ под ред. Г.С. Кондратенкова. - М.: Радио и связь. 1983. - 272 с), где используется одна приемопередающая и две приемные позиции.
Устройство для реализации этого способа содержит группировку ведущего и ведомого летательных аппаратов и центр обработки радиолокационных изображений с установленными на них навигационными системами, где на каждом летательном аппарате имеются приемо-передающее устройство, аппаратурный отсек с датчиками, доплеровский измеритель скорости и угла сноса, радиолокационная система, бортовая вычислительная система, система отображения, приводы ориентации и модули разворота диаграммы направленности луча антенны радиолокационной системы. При этом, к входам бортовой вычислительной системы подключены выходы датчиков аппаратурного отсека, выход навигационной системы и двухсторонние каналы обмена с радиолокационной системой и с приемо-передающим устройством, а выходы бортовой вычислительной системы подключены к входам приводов ориентации, входам модулей разворота диаграммы направленности луча антенны радиолокационной системы и к автопилоту.
Радиолокационная система ведущего спутника через бортовую вычислительную систему и приемо-передающее устройство ведущего спутника по радиолинии подключена к первому входу центра обработки радиолокационных изображений, а радиолокационная система ведомого спутника через бортовую вычислительную систему и приемопередающее устройство ведомого спутника по радиолинии подключена ко второму входу центра обработки радиолокационных изображений. Новым является то, что на ведущем спутнике установлена контрольно-корректирующая станция дифференциального режима спутниковой радионавигационной системы, на ведомом спутнике установлен приемник корректирующих данных, вход которого по радиолинии подключен к контрольно-корректирующей станции ведущего спутника, выход приемника корректирующих данных подключен к приемнику спутниковой радионавигационной системы ведомого спутника, а между входами приводов ориентации спутника и соответствующими выходами бортовой вычислительной системы установлены элементы с зоной нечувствительности, величина которой пропорциональна линейному участку диаграммы направленности луча антенны радиолокационной системы ведущего спутника.
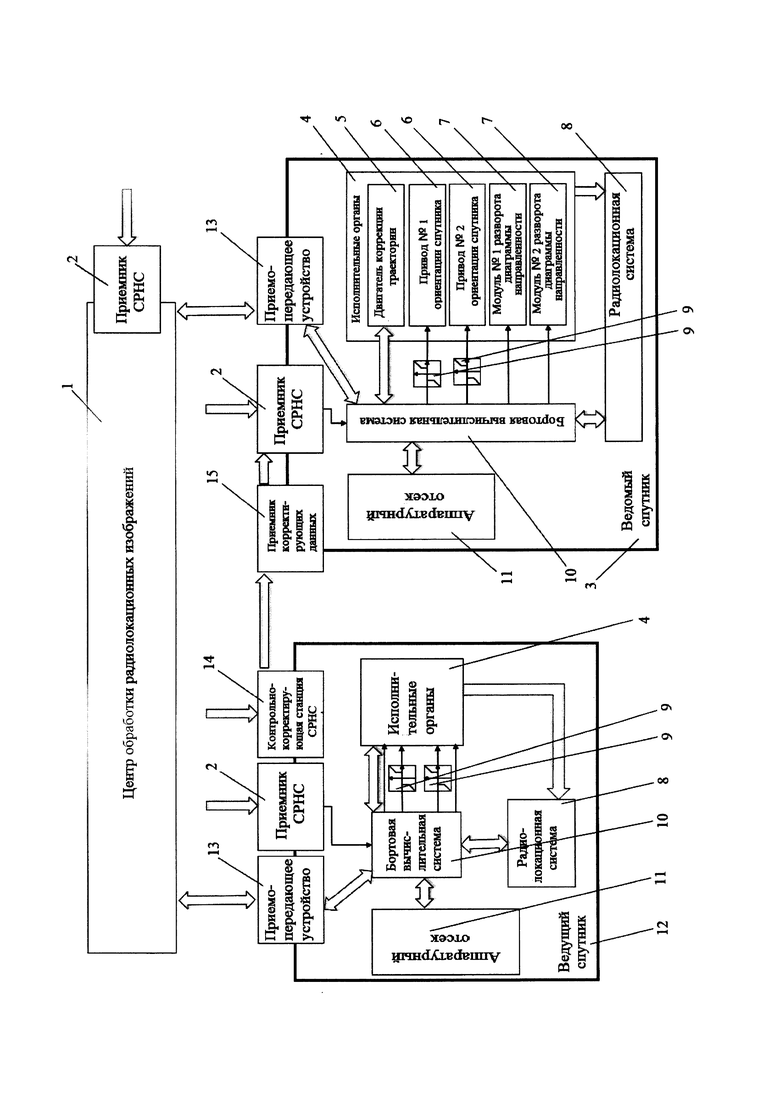
На прилагаемом чертеже изображена структурная схема устройства получения радиолокационного изображения земной поверхности, где:
1 - центр обработки радиолокационных изображений;
2 - приемник СРНС;
3 - ведомый спутник;
4 - исполнительные органы;
5 - двигатель коррекции траектории;
6 - приводы №1 и привод №2 ориентации спутника;
7 - модуль №1 и модуль №2 разворота диаграммы направленности;
8 - радиолокационная система;
9 - элементы с зоной нечувствительности;
10 - бортовая вычислительная система;
11 - аппаратурный отсек;
12 - ведущий спутник;
13 - приемо-передающее устройство;
14 - контрольно-корректирующая станция;
15 - приемник корректирующих данных;
Устройство работает следующим образом.
Центр 1 обработки радиолокационных изображений выдает координаты земной поверхности для получения радиолокационного изображения. Ведущий 12 и ведомый 3 спутники через приемо-передающее устройство 13 получают координаты участка земной поверхности, для которого необходимо получить радиолокационное
изображение.
Каждый из спутников, зная с помощью приемника СРНС 2 спутниковой радионавигационной системы типа ГЛОНАСС или GPS свое положение в пространстве, рассчитывает в бортовой вычислительной системе 10 углы, на которые надо развернуть сам спутник и направить диаграмму направленности луча антенны радиолокационной системы 8.
Управление положением спутника на орбите и разворотом диаграммы направленности луча антенны радиолокационной системы осуществляется с помощью исполнительных органов 4, которые включают двигатель коррекции траектории 5, приводов ориентации спутника 6, модулей разворота диаграммы направленности 7 луча антенны радиолокационной системы 8, на основе команды центра 1 обработки радиолокационных изображений и данных с приемника 2 спутниковой радионавигационной системы, с датчиков аппаратурного отсека 11 и с датчиков радиолокационной системы 8.
Радиолокационная система 8 ведущего спутника 12 излучает зондирующий сигнал на требуемый участок земной поверхности.
Отраженный сигнал принимается радиолокационной системой ведущего и радиолокационной системой ведомого спутников. В бортовых вычислительных системах 10 ведущего и ведомого спутников проводится синтез радиолокационных изображений наблюдаемого участка земной поверхности. Синтезированные изображения затем через приемо-передающие устройства 13 транслируются в центр 1 обработки радиолокационных изображений. В центре 1 выполняется анализ полученных разноракурсных радиолокационных изображений и синтезируется итоговое изображение земной поверхности с селекцией выявленных наземных целей.
Установка на ведущем спутнике 12 контрольно-корректирующей станции 14 дифференциального режима спутниковой радионавигационной системы позволяет ведомому спутнику 3 работать в едином информационном пространстве ведущего спутника 12, что дает возможность повысить точность определения координат местоположения в пространстве ведомого спутника 3 относительно ведущего спутника 12 и, как результат, позволяет, во-первых, повысить точность наведения диаграммы направленности луча антенны радиолокационной системы 8 ведомого спутника на зондируемый участок земной поверхности, во-вторых, повысить разрешающие возможности анализа разноракурсных изображений и, в-третьих, значительно повысить масштаб получаемых радиолокационных изображений.
Повышение точности достигается тем, что приемники 2 принимают сигналы спутников радионавигационной системы с учетом влияния ионосферной и тропосферной рефракции, многолучевым распространением сигнала, временными погрешностями передачи и обработки навигационных сигналов и другими источниками ошибок. Названные факторы обусловливают расчет координат местоположения спутниковой радионавигационной системы со среднеквадратическим отклонением от истинного значения до 5-15 метров.
Контрольно-корректирующая станция 14 рассчитывает поправки Δpi для последующего уточнения местоположения ведомого спутника 3. Поправки Δpi определяются по отклонениям псевдодальности pi от действительной ri дальности каждого видимого спутника спутниковой радионавигационной системы от ведущего спутника:
Δpi = pi - ri,
где i=1, 2, … N, причем N - количество спутников радионавигационной системы, видимых приемником 2 с позиции 12 (см. [6] - «Применение GPS /ГЛОНАСС». Учебное пособие / М.Р. Богданов - Долгопрудный.: Издательский Дом «Интеллект». 2012. - 136 с.).
Для расчета действительной дальности ri определяется действительное местоположение ведущего спутника, которое может осуществляться, например, замером полярных координат ведущего спутника относительно тестовых объектов на земной поверхности и последующим их пересчетом в земную систему координат. Для расчета ri (i=1, 2, … N) также используются координаты, передаваемые i-ым спутником радионавигационной системы.
Расчет псевдодальности pi выполняется с использованием классических алгоритмов приемника 2 спутниковой радионавигационной системы.
Поправки, рассчитанные контрольно-корректирующей станцией 14, передаются по радиолинии на приемник корректирующих данных 15 ведомого спутника и далее передаются на приемник 2 спутниковой радионавигационной системы ведомого спутника 3 для повышения точности определения координат его местоположения в пространстве.
Установка элементов с зоной нечувствительности 9 между входами приводов ориентации спутников и соответствующими выходами бортовой вычислительной системы позволяет реализовать на спутнике экономичный режим наведения луча радиолокационной системы на требуемый участок земной поверхности. При отсутствии таких элементов приводы ориентации спутника будут всегда включаться, если есть ненулевое рассогласование продольной оси спутника и направлением оси антенны радиолокационной системы.
При наличии элементов с зоной нечувствительности включение приводов ориентации спутников на зондируемый участок будет происходить лишь тогда, когда исчерпаны возможности радиолокационной системы направлять луч в нужную область земной поверхности, т.е. приводы ориентации спутника будут включаться либо когда центр 1 обработки радиолокационных изображений задал новую область, удаленную от исходной области зондирования, либо когда накопились факторы, не позволяющие радиолокационной системе вести зондирование требуемого участка земной поверхности в линейной области работы диаграммы направленности луча.
Линейная зона, пропорциональная диаграмме направленности луча, в значительной мере определяется конструкцией антенны радиолокационной системы. Так для фазированной решетки такая зона значительно шире зоны узконаправленной антенны и может составлять десятки угловых градусов.
В предлагаемом устройстве использование элементов с зоной нечувствительности позволяет достичь положительного эффекта для управления ориентацией спутников во время дистанционного зондирования земной поверхности за счет включения приводов ориентации лишь при «больших» отклонениях направления оси антенны радиолокационной системы от продольной оси спутника и тем самым реализовать экономичный режим работы исполнительных органов спутника.
Координация спутников в едином информационном пространстве ведущего спутника позволяет с более высокой точностью сориентировать принимающую антенну ведомого спутника на прием отраженного луча от зондируемого участка земной поверхности и получить более подробное представление участка земной поверхности в центре 1 обработки радиолокационных изображений.
Для группировки спутников в соответствии с предлагаемым устройством разрешающая способность при получении высокодетализированных изображений земной поверхности составит до 1 метра и при этом будет обеспечен экономичный режим работы спутников.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ глобальной активно-пассивной многопозиционной спутниковой радиолокации земной поверхности и околоземного пространства и устройство для его осуществления | 2019 |
|
RU2700166C1 |
| СИСТЕМА ОРИЕНТАЦИИ АНТЕННЫ СТАНЦИИ СВЯЗИ | 2009 |
|
RU2408917C1 |
| СИСТЕМА И СПОСОБ СЛЕЖЕНИЯ АНТЕННОЙ СИСТЕМЫ ЗЕМНОЙ СТАНЦИИ ПОДВИЖНОЙ СПУТНИКОВОЙ СВЯЗИ | 2023 |
|
RU2821956C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381518C2 |
| КОСМИЧЕСКАЯ СИСТЕМА ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ | 2020 |
|
RU2747240C1 |
| СПОСОБ И СИСТЕМА АНТЕННЫХ ИЗМЕРЕНИЙ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ПРИВЯЗНОГО АЭРОСТАТА | 2023 |
|
RU2818996C1 |
| УСОВЕРШЕНСТВОВАНИЕ КОСМИЧЕСКИХ АППАРАТОВ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ИЛИ СВЯЗИ | 1997 |
|
RU2199803C2 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА НАДВОДНОГО ОБЪЕКТА | 1999 |
|
RU2152049C1 |
| Способ оптимального восстановления изображений в радиолокационных системах дистанционного зондирования Земли | 2016 |
|
RU2624460C1 |
Устройство дистанционного зондирования земной поверхности относится к области радиотехники, а именно к системам, использующим отражение или вторичное излучение радиоволн, и может найти применение в системах дистанционного зондирования с получением высокодетализированных изображений земной поверхности. Устройство содержит группировку ведущего и ведомого спутников и центр обработки радиолокационных изображений с установленными на них приемниками спутниковой радионавигационной системы, где на каждом спутнике имеется приемо-передающее устройство, аппаратурный отсек с датчиками, радиолокационная система, бортовая вычислительная система, два привода ориентации и два модуля разворота диаграммы направленности луча антенны радиолокационной системы. Новым является то, что на ведущем спутнике установлена контрольно-корректирующая станция дифференциального режима спутниковой радионавигационной системы, на ведомом спутнике установлен приемник корректирующих данных, вход которого по радиолинии подключен к контрольно-корректирующей станции ведущего спутника, выход приемника корректирующих данных подключен к приемнику спутниковой радионавигационной системы ведомого спутника, а между входами приводов ориентации спутника и соответствующими выходами бортовой вычислительной системы установлены элементы с зоной нечувствительности, величина которой пропорциональна линейному участку диаграммы направленности луча антенны радиолокационной системы ведущего спутника. Такое решение позволяет повысить точность построения карт рельефа и упростить конструкцию. 1 ил.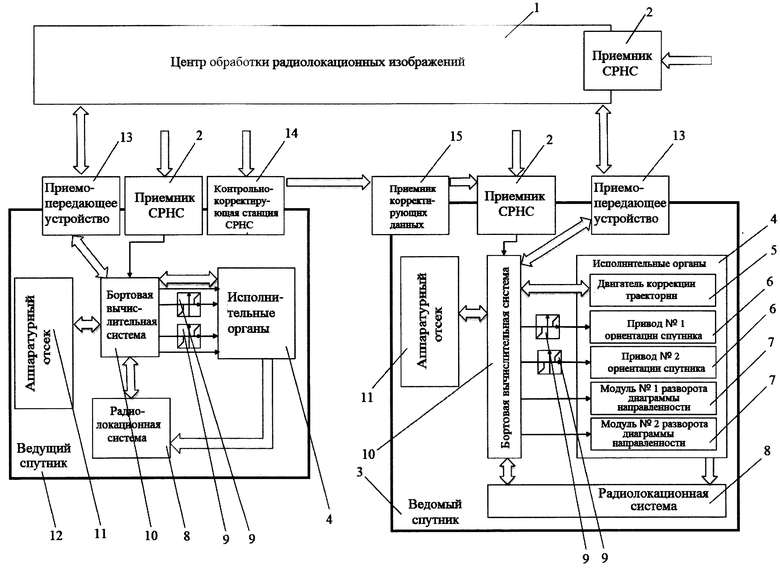
Устройство дистанционного зондирования земной поверхности, содержащее группировку ведущего и ведомого спутников и центр обработки радиолокационных изображений с установленными на них приемниками спутниковой радионавигационной системы, где на каждом спутнике имеется приемо-передающее устройство, аппаратурный отсек с датчиками, радиолокационная система, предназначенная для зондирования наблюдаемого участка земной поверхности, бортовая вычислительная система, предназначенная для синтеза радиолокационного изображения наблюдаемого участка земной поверхности, исполнительные органы, включающие двигатель коррекции траектории, два привода ориентации и два модуля разворота диаграммы направленности луча антенны радиолокационной системы, причем управление положением спутников на орбите и разворотом диаграммы направленности луча антенны радиолокационной системы на каждом спутнике осуществляется с помощью исполнительных органов на основе команды центра обработки радиолокационных изображений и данных с приемников спутниковой навигационной системы, а также с помощью датчиков аппаратурного отсека и датчиков радиолокационной системы, при этом к входам бортовой вычислительной системы подключены выходы датчиков аппаратурного отсека, выход приемника спутниковой радионавигационной системы и двухсторонние каналы обмена с радиолокационной системой и с приемо-передающим устройством, а выходы бортовой вычислительной системы подключены ко входам двух приводов ориентации и входам модулей разворота диаграммы направленности луча антенны радиолокационной системы, причем радиолокационная система ведущего спутника через бортовую вычислительную систему и приемо-передающее устройство ведущего спутника по радиолинии подключена к первому входу центра обработки радиолокационных изображений, а радиолокационная система ведомого спутника через бортовую вычислительную систему и приемо-передающее устройство ведомого спутника по радиолинии подключена ко второму входу центра обработки радиолокационных изображений, отличающееся тем, что на ведущем спутнике установлена контрольно-корректирующая станция дифференциального режима спутниковой радионавигационной системы, на ведомом спутнике установлен приемник корректирующих данных, вход которого по радиолинии подключен к контрольно-корректирующей станции ведущего спутника, выход приемника корректирующих данных подключен к приемнику спутниковой радионавигационной системы ведомого спутника, а между входами приводов ориентации спутника и соответствующими выходами бортовой вычислительной системы каждого спутника установлены элементы с зоной нечувствительности, величина которой пропорциональна линейному участку диаграммы направленности луча антенны радиолокационной системы ведущего спутника, обеспечивающие режим наведения луча радиолокационной системы каждого спутника на требуемый участок земной поверхности, при этом в центре обработки радиолокационных изображений анализируют разноракурсные радиолокационные изображения от ведущего и ведомого спутников и синтезируют итоговое изображение с селекцией выявленных наземных целей.
| СПОСОБ ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ ПРИ ПОМОЩИ МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2004 |
|
RU2278398C2 |
| ИНТЕГРАЛЬНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2112991C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА НАДВОДНОГО ОБЪЕКТА | 1999 |
|
RU2152049C1 |
| Способ построения радиолокационного изображения с помощью радиолокационной станции с синтезированной апертурой | 2017 |
|
RU2661941C1 |
| US 7724176 B1, 25.05.2010 | |||
| US 6138074 A, 24.10.2000 | |||
| EP 1876465 B1, 09.10.2013. | |||

