Изобретение касается способа определения состояния электродвигателя, который имеет статор и ротор, установленный с возможностью вращения относительно статора. Далее, изобретение касается соответствующего электродвигателя, а также вентилятора.
Эксплуатационные характеристики электродвигателя и его предполагаемый срок службы зависят от многих факторов. Одним из важных факторов является температура, которая устанавливается в электродвигателе, на компонентах электродвигателя и/или на его поверхности. Так, температура имеет непосредственное влияние на ожидаемый срок службы подшипников ротора. Срок службы подшипников решающим образом зависит от остаточных смазочных свойств консистентной смазки подшипников. Повышение температуры подшипников на 10 Кельвинов уже имеет следствием сокращение ожидаемого срока службы подшипников вдвое, так как при более высоких температурах и связанной с ними более низкой вязкости консистентной смазки подшипников простое смазочное средство может выступать из подшипников. Также вследствие повышенной температуры одновременно могут страдать электронные компоненты. Поэтому у электродвигателей важно, чтобы был гарантирован достаточный отвод тепла от электродвигателя.
Во многих случаях для достаточного отвода тепла важно, чтобы эффекты вентиляции, которые создаются вращательным движением ротора относительно статора, приводили к достаточному движению воздуха. В частности, в рабочей окружающей среде, имеющей высокую долю загрязнений, например, в сельском хозяйстве, в электродвигателе могут скапливаться твердые частицы, например, пыль. Они, с одной стороны, ослабляют эффекты вентиляции или полностью подавляют их. Но, с другой стороны, негативному влиянию подвергаются также обусловленные естественной конвекцией характеристики охлаждения, в частности ребер охлаждения статора. Таким образом отвод тепла от электродвигателя может быть ухудшен столь сильно, что следует опасаться преждевременного выхода электродвигателя из строя.
В другом сценарии, который может приводить к преждевременному выходу электродвигателя из строя, имеется негерметичность. Если в электродвигателе расположена электроника, она должна быть достаточно герметизирована от влияний из окружающей среды электродвигателя, например, во избежание коррозии или коротких замыканий вследствие проникающей влаги. Если из-за повреждения запорной крышки, недостаточного привертывания крышки или иной негерметичности необходимая герметичность корпуса электроники больше не обеспечена, проникающая влага может разрушать расположенную в корпусе электроники электронику и вместе с тем электродвигатель. К тому же при этом могут также подвергаться негативному влиянию эффекты вентиляции, так как движущийся воздух уже не идет заданными путями.
Оба сценария, приведенных выше в качестве примера, не могут надежно распознаваться известными из практики способами. Однако это желательно, чтобы можно быть принимать превентивные меры, например, техническое обслуживание или чистку электродвигателя. Кроме того, с помощью этой информации о состоянии мог бы улучшаться прогноз ожидаемого срока службы электродвигателя.
Из DE 10 2018 211 838 A1 известны способы, с помощью которых могут обнаруживаться дисбалансы вентилятора, например, вследствие прилипающих к рабочему колесу загрязнений. Эти дисбалансы позволяют также делать определенные заключения о загрязнении электродвигателя в целом. Однако эти способы могут использоваться только тогда, когда налипания действительно приводят к дисбалансу. Загрязнения, которые не создают значительных дисбалансов и не мешают решающим образом эффектам вентиляции ротора, неразличимы. Даже если возникают дисбалансы, связь с действительным загрязнением электродвигателя может определяться только приблизительно на основе опытных значений. На распознавание негерметичностей эти способы не рассчитаны.
Поэтому в основе настоящего изобретения лежит задача, выполнить и усовершенствовать способ, электродвигатель, а также вентилятор вышеназванного вида таким образом, чтобы было возможно надежное определение состояния электродвигателя при низких издержках.
В соответствии с изобретением вышеназванная задача решается с помощью признаков п.1 формулы изобретения. Соответственно этому, способ, о котором идет речь, использует эффект, при котором вследствие вращательного движения ротора в воздушной камере внутри электродвигателя создается разность давлений относительно окружающей среды электродвигателя, при этом в нормальном состоянии электродвигателя разность давлений зависит от фактической частоты вращения ротора. Способ включает в себя этапы:
установление фактической разности давлений между воздушной камерой и окружающей средой электродвигателя;
установление фактической частоты вращения ротора и
расчет показателя на основе фактической разности давлений и фактической частоте вращения, вследствие которого получается репрезентативный для состояния электродвигателя показатель.
В отношении электродвигателя вышестоящая задача решается с помощью признаков п.10 формулы изобретения. Соответственно этому, электродвигатель, о котором идет речь, включает в себя статор, ротор, опертый с возможностью вращения относительно статора, и воздушную камеру, образованную внутри электродвигателя, при этом в нормальном состоянии электродвигателя ротор вследствие своего вращательного движения создает в воздушной камере разность давлений относительно окружающей среды электродвигателя, при этом электродвигатель дополнительно включает в себя систему датчиков давления, систему определения частоты вращения и блок оценки, при этом система датчиков давления выполнена для установления фактической разности давлений между окружающей средой электродвигателя и воздушной камерой, при этом система определения частоты вращения выполнена для установления фактической частоты вращения ротора, и при этом блок оценки выполнен для того, чтобы на основе фактической разности давлений и фактической частоты вращения определять состояние электродвигателя.
В отношении вентилятора вышестоящая задача решается с помощью признаков п.18 формулы изобретения. Соответственно этому, вентилятор, о котором идет речь, включает в себя предлагаемый изобретением электродвигатель и рабочее колесо, которое связано с ротором электродвигателя.
Предлагаемым изобретением образом сначала было обнаружено, что эффекты вентиляции, которые создаются вращательным движением ротора, приводят не только к движению воздуха, способствующему отводу тепла от электродвигателя. Более того, эффекты вентиляции обычно приводят также к тому, что подвергается влиянию давление воздуха в разных областях внутри электродвигателя. При этом по меньшей мере в областях внутри электродвигателя - ниже также называемых воздушной камерой - возникает разность давлений относительно окружающей среды электродвигателя, которая является репрезентативной для размера эффектов вентиляции. По этой разности давлений могут делаться заключения о состоянии электродвигателя.
В соответствии с изобретением используется система датчиков давления, с помощью которой определяется фактическая разность давлений в воздушной камере внутри электродвигателя относительно окружающей среды электродвигателя. При этом воздушная камера представляет собой область внутри электродвигателя, в которой вращательное движение ротора электродвигателя создает ранее описанную разность давлений. Эта разность давлений в нормальном состоянии зависит от фактической частоты вращения двигателя, при этом нормальным состоянием может быть состояние нового и чистого электродвигателя с завода. Поэтому находится фактическая частота вращения, при которой была найдена фактическая разность давлений. На основе найденной фактической разности давлений и найденной фактической частоты вращения рассчитывается показатель, который является репрезентативным для состояния электродвигателя. Этот показатель может, например, описывать, «насколько» состояние электродвигателя далеко от нормального состояния, или сколько воздуха, подсасываемого через неплотности, протягивается через электродвигатель. Таким образом получаются способ и электродвигатель, которые обеспечивают возможность определения состояния при низких дополнительных издержках.
Какая разность давлений установится в воздушной камере, будет зависеть, наряду с фактической частотой вращения, по существу от конструкции двигателя и места воздушной камеры. Так, воздушная камера может представлять собой область внутри электродвигателя, из которой вследствие эффектов вентиляции вытягивается воздух. В этом случае в этой воздушной камере будет устанавливаться пониженное давление. Но воздушная камера может быть также выполнена в месте внутри электродвигателя, в которое эффекты вентиляции нагнетают воздух. В этом случае в этой воздушной камере будет устанавливаться повышенное давление. Оба случая могут использоваться в связи с предлагаемой изобретением теорией, пока разность давлений достаточно велика, чтобы измеряться при приемлемых издержках.
Под термином «окружающая среда электродвигателя», относительно которой должна находиться разность давлений, понимается, в общем и целом, область вне электродвигателя, которая в отношении давления воздуха в благоприятном случае не подвергается или, во всяком случае, в небольшой степени подвергается влиянию электродвигателя или системы, в которой эксплуатируется электродвигатель (например, вентилятора). При этом эта «окружающая среда» не должна лежать в области влияния колеса охлаждения или непосредственно у выпуска воздуха электродвигателя. Одновременно эта область не должна быть «слишком» удалена от электродвигателя, чтобы найденное давление воздуха окружающей среды могло также представлять собой репрезентативное значение при определении разности давлений. Поэтому эта область должна быть удалена от электродвигателя предпочтительно не дальше, чем на 100 метров, особенно предпочтительным образом не дальше, чем на 50 метров, и в высшей степени предпочтительным образом не дальше, чем на 10 метров. Из этого определения может быть исключение, если электродвигатель является частью вентилятора, и этот вентилятор одновременно влияет протекающим воздухом на давление воздуха внутри электродвигателя. В этом случае «окружающая среда электродвигателя» может быть в непосредственной близости к электродвигателю, т.е. удалена от наружной поверхности электродвигателя меньше, чем на 50 см, предпочтительно меньше, чем на 20 см, особенно предпочтительным образом меньше, чем на 10 см. Так как рабочее колесо этого вентилятора может иметь влияние не давление окружающей среды или давление в воздушной камере внутри электродвигателя, влияние рабочего колеса может рассчитываться. Для этого может использоваться, например, модель вентилятора, например, цифровой двойник, который описан в DE 10 2019 201 409 A1 или DE 10 2019 201 412 A1.
Предлагаемый изобретением способ может, в принципе, использоваться для определения разных состояний. При этом важно, чтобы определяемые состояния имели воздействие на условия давления внутри электродвигателя и вместе с тем создавали разность давлений в воздушной камере внутри электродвигателя. Это имеет место, в частности, тогда, когда эти состояния имеют воздействия на эффекты вентиляции внутри электродвигателя. Определяемое состояние может указывать на негерметичность в некотором, обычно герметичном, месте электродвигателя, если эта негерметичность имеет влияние на давление в воздушной камере. В другом варианте осуществления определяемое состояние может указывать на влияние на проточные каналы внутри электродвигателя. Это может быть вызвано загрязнениями, такими как, например, пыль или иная прилипающая грязь. Однако возможно было бы также, чтобы такое влияние представляло собой обледенение или загрязнение (например, всосанными листьями) на впуске воздуха.
Из показателя можно уже считывать достаточно информации о состоянии электродвигателя. Так, этот показатель может, например, указывать, что электродвигатель «загрязнен на 7%» или «чист на 90%», чтобы в качестве примера назвать только два возможных показания показателя. Этот показатель может выдаваться вышестоящим системам, чтобы, например, применяться в термической модели в качестве степени загрязнения. Однако показатель - в одном из усовершенствованных вариантов осуществления - может применяться также для того, чтобы относить состояние электродвигателя к своего рода категории состояния, например, «нормальное состояние», «слегка загрязнен», «сильно загрязнен» или «негерметичен», чтобы назвать некоторые возможные категории состояния. В этом усовершенствовании показатель сравнивался бы с пороговым значением, и категория состояния или вообще состояние электродвигателя определялось бы на основе результата сравнения показателя с этим пороговым значением. При этом могут также использоваться несколько пороговых значений, так что могут распознаваться и отличаться друг от друга несколько состояний.
При этом пороговое значение и сравнение с ним могут быть реализованы самым разным образом. Вариант осуществления зависит по существу от того, какое состояние должно определяться, и как рассчитывается показатель. Так, возможно, чтобы показатель указывал степень загрязнения электродвигателя, и чтобы пороговое значение устанавливало, до какой разности давлений электродвигатель должен считаться находящимся в «нормальном состоянии», и начиная с какой разности давлений электродвигатель может считаться «загрязненным» или «сильно загрязненным». В другом варианте осуществления показатель может указывать «разницу» с начальным показателем, который был определен во время ввода в эксплуатацию или окончательного контроля электродвигателя после его изготовления. В этом случае пороговое значение может указывать, какая разница с «нормальным состоянием» может считаться приемлемой, и начиная с какой разницы должны приниматься ответные меры. Если в качестве состояния должна определяться нежелательная негерметичность, то может оцениваться зависимость показателя от частоты вращения. Если показатель при изменении частоты вращения не изменяется или изменяется только несущественно, то есть изменение показателя при различных частотах вращения остается ниже порогового значения, то можно сделать заключение о состоянии «негерметичный».
Это пороговое значение может быть задано как постоянное и предопределенное значение. Однако в одном из усовершенствований возможно также, чтобы пороговое значение адаптировалось на основе других рамочных условий. Так, например, положение монтажа электродвигателя имеет влияние на отвод тепла от электродвигателя и поэтому может привлекаться к адаптации порогового значения. К тому же на температуру внутри электродвигателя имеет влияние, например, также нагрузка или, говоря вообще, рабочая точка электродвигателя. Если электродвигатель нагружен только небольшим моментом нагрузки, возникает меньше отходящего тепла, которое тогда даже при относительно сильно загрязненном электродвигателе может еще достаточно хорошо отводиться. Если электродвигатель нагружен относительно большим моментом нагрузки, уже легкое загрязнение электродвигателя может приводить к термической избыточной нагрузке на электродвигатель. Поэтому рабочая точка электродвигателя может применяться для адаптации порогового значения/пороговых значений. Для этой адаптации пороговых значений может применяться термическая модуль электродвигателя. В большинстве случаев адаптация пороговых значений может осуществляться с помощью цифрового двойника, который описан, например, в DE 10 2019 201 409 A1 или DE 10 2019 201 412 A1.
Показатель может быть реализован самым разным образом. Так как используется зависимость разности давлений от частоты вращения, важно, чтобы показатель имел зависимость от фактической разности давлений и фактической частоты вращения. Как конкретно выглядит эта зависимость, не является принципиально решающим для предлагаемого изобретением способа. Надлежащий показатель могут давать линейные зависимости, а также полиномиальные или экспоненциальные зависимости, отношения или комбинации разных зависимостей. Наряду с фактической разностью давлений и фактической частотой вращения, в показателе могут использоваться и другие величины, такие как, например, измеренные в более ранний момент времени при эксплуатации электродвигателя разности давлений или линия характеристики давления электродвигателя. Принципиально возможно даже, чтобы электродвигатель эксплуатировался с контрольной частотой вращения, например, 1000 оборотов в минуту, и чтобы тогда показатель уменьшался по существу до фактической разности давлений. В одном из особенно предпочтительных вариантов осуществления показатель рассчитывается как отношение фактической разности давлений и квадрата фактической частоты вращения.
В одном из усовершенствованных вариантов осуществления показатель может быть нормирован до референтного значения. Таким образом может получаться показатель, находящийся в предопределенных пределах, например, от 0 до 1 или от 0% до 100%. Референтное значение может быть фиксированным численным значением. Однако возможно также, чтобы референтное значение было зависимым от частоты вращения электродвигателя, при этом предлагается, чтобы референтное значение и показатель имели одинаковую зависимость от частоты вращения. Референтное значение может быть получено разным образом. Так, новый электродвигатель с завода одинакового типа может обмеряться на контрольном стенде, и путем регистрации разности давлений вместе с соответствующей частотой вращения получаться зависящее от частоты вращения референтное значение. Если референтное значение представляет собой одно отдельное численное значение, референтное значение может быть получено путем определения разности давлений при определенной частоте вращения, например, номинальной частоте вращения электродвигателя.
В одном из предпочтительных вариантов использования референтного значения оно определяется при первом вводе в эксплуатацию электродвигателя и/или при окончательном контроле после изготовления электродвигателя, причем электродвигатель в этом варианте осуществления представляет собой электродвигатель, при котором осуществляется предлагаемый изобретением способ. Этот вариант осуществления дает то преимущество, что разбросы параметров экземпляров у электродвигателей одинакового типа не влияют на референтное значение. Во многих случаях при этом варианте осуществления практически не возникают никакие, или, во всяком случае, возникают небольшие дополнительные издержки, так как очень много электродвигателей, так или иначе, после изготовления и/или при первом вводе в эксплуатацию проверяются на соблюдение номинальных характеристик, например, пусковые характеристики, виброустойчивость, качество балансировки или потребление энергии.
В принципе, для предлагаемого изобретением способа несущественно, каким образом определяется фактическая разность давлений. Существенно, чтобы могла указываться разность давлений между воздушной камерой внутри электродвигателя и окружающей средой электродвигателя. При этом возможно, чтобы измерялись значение давления, которое является репрезентативным для внутренней области воздушной камеры, и значение давления, которое является репрезентативным для окружающей среды электродвигателя, и ставилось в соотношение друг с другом. Однако возможно также, чтобы напрямую с помощью датчика разности давлений находилась фактическая разность давлений. В большинстве случаев эти значения давления относятся к давлению воздуха.
Если устанавливают давление воздуха в воздушной камере, то это может происходить путем расположения датчика давления внутри воздушной камеры. В частности, если воздушная камера образована корпусом электроники, и в этом корпусе электроники, так или иначе, расположена электроника, датчик давления может быть интегрирован в эту электронику. Однако возможно также, чтобы напорный трубопровод соединял воздушную камеру с измерительной камерой, так чтобы в воздушной камере и измерительной камере устанавливались приблизительно одинаковые давления воздуха. Тогда собственно измерение давления осуществляется в измерительной камере. Этот вариант осуществления дает то преимущество, что датчик давления может быть расположен также вне электродвигателя, и что при этом также имеющиеся электродвигатели могут просто дооснащаться для предлагаемого изобретением способа.
В одном из особенно простых вариантов осуществления оценивается давление воздуха окружающей среды. Это может происходить путем измерения давление воздуха окружающей среды, например, при первоначальной настройке, или путем расчета значения давления воздуха как среднего значения из разных давлений воздуха в различные времена на месте установки. Однако предпочтительно давление воздуха окружающей среды измеряется во время или близко во времени к измерению давления воздуха в воздушной камере.
В одном из вариантов осуществления установления фактической разности давлений применяется один отдельный датчик абсолютного давления, который регистрирует значения давления при различных частотах вращения электродвигателя, причем эти значения давления отражают давления воздуха, которые имеются внутри воздушной камеры. В этом варианте осуществления система датчиков давления образована одним датчиком абсолютного давления и зависящим от частоты вращения вычислительным блоком. Этот вариант осуществления может использоваться, в частности, при динамической эксплуатации электродвигателя, т.е. в сценариях применения, в которых электродвигатель в пределах окна времени, например, в течение нескольких секунд, нескольких минут, 15 минут или одного часа, эксплуатируется при по меньшей мере двух, заметно отличающихся частотах вращения, например, останов и 1000 оборотов в минуту, или 100 и 2000 оборотов в минуту. При этом используются два эффекта: во-первых, давление воздуха окружающей среды обычно изменяется только медленно, так что измерение давления воздуха окружающей среды в течение определенного времени является достаточно точным для текущего давления воздуха окружающей среды. Во-вторых, вследствие зависимости от частоты вращения фактическая разность давлений давления воздуха в воздушной камере будет приближаться к давлению воздуха окружающей среды, чем ниже частота вращения. Поэтому предпочтительно первое измерение выполняется при останове электродвигателя (т.е. частоте вращения двигателя, равной 0 или по меньшей мере приблизительно 0), а второе измерение при частоте вращения, неравной 0, при этом второе измерение хотя и предпочтительно, но не обязательно должно осуществляться во времени после первого измерения. Затем результат измерения при первом измерении может приравниваться к давлению воздуха окружающей среды, так что фактическая разность давлений может находиться путем сравнения результата измерения из первого измерения и результата измерения из второго измерения. При этом частота вращения при втором измерении должна быть достаточно большой, чтобы устанавливалась измеримая разность давлений.
Первое измерение и второе измерение должны быть удалены друг от друга во времени не больше, чем на 3 часа, предпочтительно не больше, чем на 1 час, в высшей степени предпочтительным образом не больше, чем на 30 минут. Выбор временного расстояния между первым и вторым измерением может ставиться в зависимость от сценария применения электродвигателя. Если электродвигатель, например, эксплуатируется в практически закрытом помещении, то давление воздуха окружающей среды могло бы подвергаться только небольшим изменениям, и временное расстояние между первым и вторым измерением может выбираться большим. Если электродвигатель применяется в области, в которой давление воздуха окружающей среды подвергается влиянию открывающихся дверей, окон или тамбуров, сильно изменяющихся температур или других эффектов, то рекомендуются более короткие временные расстояния. Тогда здесь может предлагаться временное расстояние меньше 30 секунд, например, от 5 до 20 секунд.
В другом варианте установления фактической разности давлений применяются два датчика абсолютного давления. При этом первый датчик абсолютного давления подвергается воздействию давления воздуха в воздушной камере, а второй датчик абсолютного давления - давлению воздуха, которое является репрезентативным для давления в окружающей среде электродвигателя. Таким образом фактическая разность давлений может получаться путем вычитания результатов измерений первого и второго датчика абсолютного давления. При этом первый и второй датчик абсолютного давления образуют систему датчиков давления.
В другом варианте установления фактической разности давлений в качестве системы датчиков давления применяется датчик разности давлений. При этом к первой поверхности датчика упомянутого датчика разности давлений прикладывается давление воздуха, которое действует внутри воздушной камеры, а ко второй поверхности датчика упомянутого датчика разности давлений - давление воздуха, которое действует в окружающей среде. Надлежащие датчики разности давлений известны из практики. Этот вариант осуществления дает то преимущество, что фактическая разность давлений имеется непосредственно в виде результата измерения, и обычно для установления фактической разности давлений не нужны никакие этапы расчета.
В принципе, фактическая разность давлений и/или расчетный показатель может находиться в один отдельный момент времени, и отсюда делаться заключение о состоянии электродвигателя и инициироваться возможные ответные меры. Однако возможно также, чтобы во избежание неправильных оценок и неправильных определений находились несколько фактических разностей давлений и/или несколько показателей, и чтобы состояние электродвигателя определялось на основе усредненной фактической разности давлений и/или усредненного показателя.
Предлагаемый изобретением электродвигатель включает в себя статор, опертый с возможностью вращения относительно статора ротор и образованную внутри электродвигателя воздушную камеру. При этом ротор вследствие своего вращательного движения создает в воздушной камере внутри электродвигателя разность давлений относительно окружающей среды электродвигателя. Эта разность давлений образуется, в частности, при нормальном состоянии электродвигателя. Это нормальное состояние может, например, иметься реально или иметься ранее при первом вводе в эксплуатацию. Предлагаемый изобретением электродвигатель включает в себя дополнительно систему датчиков давления, систему установления частоты вращения и блок оценки, при этом система датчиков давления выполнена для установления фактической разности давлений между окружающей средой электродвигателя и воздушной камерой. Система установления частоты вращения выполнена для установления фактической частоты вращения ротора, при этом фактическая разность давлений и фактическая частота вращения находятся предпочтительно одновременно или по меньшей мере близко во времени (например, в течение одной десятой секунды или в течение нескольких секунд).
Блок оценки выполнен для того, чтобы на основе фактической разности давлений и фактической частоты вращения определять состояние электродвигателя. Предлагаемый изобретением электродвигатель выполнен предпочтительно для выполнения предлагаемого изобретением способа.
В принципе, для предлагаемого изобретением способа и предлагаемого изобретением электродвигателя не важно, каким образом создается фактическая разность давлений. Движения воздуха, которые создаются вращающимся колпаком ротора, в зависимости от типа двигателя, имеющего магниты или пакет обмотки ротора, уже могут быть достаточны для создания измеримой разности давлений. Однако в одном из предпочтительных усовершенствований фактическая разность давлений создается колесом охлаждения, которое связано с ротором, так что вращение ротора приводит к вращению колеса охлаждения (чаще всего с идентичной частотой вращения). Такое колесо охлаждения нагнетает воздух из окружающей среды электродвигателя через статор и/или ротор электродвигателя и таким образом способствует отводу тепла от электродвигателя. Благодаря такому колесу охлаждения движется относительно большое количество воздуха, так что возникает хорошо измеримая фактическая разность давлений.
Альтернативно или дополнительно фактическая разность давлений в воздушной камере может подвергаться влиянию выпуска воздуха электродвигателя, причем этот выпуск воздуха может быть выполнен с ребрами статора-ротора и/или лабиринтным зазором. Чем свободнее движимый эффектами вентиляции воздух может выходить из электродвигателя на выпуске воздуха, тем лучше может отводиться тепло от электродвигателя. Чем сильнее это движение воздуха ухудшено, например, вследствие возрастающей степени загрязнения, тем сильнее ухудшен отвод тепла. Оказалось, что и этот выпуск воздуха или, соответственно, степень того, насколько свободно воздух может выходить из электродвигателя, тоже имеет воздействия на фактическую разность давлений в воздушной камере.
Воздушная камера может быть выполнена, в принципе, в самых разных местах электродвигателя. Пока эффекты вентиляции электродвигателя создают достаточную разность давлений в воздушной камере, эта воздушная камера, в принципе, может использоваться для определения состояния. Однако предпочтительно воздушная камера выполнена в корпусе электроники, который выполнен в или на электродвигателе. Причем этот корпус электроники особенно предпочтительным образом выполнен на втулке статора электродвигателя.
Электродвигатель может иметь принципиально разную конструкцию, и/или могут применяться разные технологии. Важно, чтобы ротор был оперт с возможностью вращения относительно статора, и чтобы движение ротора создавало достаточные эффекты вентиляции, чтобы в воздушной камере возникала разность давлений. Однако предпочтительно предлагаемый изобретением электродвигатель представляет собой электронно-коммутируемый двигатель (EC-двигатель) и/или двигатель с внешним ротором.
Для использования полученной информации о состоянии электродвигатель может иметь блок связи, который выполнен для того, чтобы посылать полученную посредством блока оценки информацию о состоянии в блок менеджмента. Этот блок связи может быть выполнен самым разным образом, и могут применяться самые разные стандарты и технологии связи для передачи данных. Цифровые технологии передачи могут использоваться точно так же, как и аналоговые. Передача может осуществляться проводным или беспроводным путем. Могут использоваться параллельные или последовательные интерфейсы передачи. Передача может осуществляться пакетами или по прямым соединениям. Только в качестве примера, однако не ограничиваясь этим, ссылаемся на применение Bluetooth, Bluetooth LE (Low Energy), NFC (Near Field Communication), Ethernet, RS485, Modbus, Profibus, CAN-Bus или USB (Universal Serial Bus).
Также блок менеджмента может иметь разную конструкцию и образовывать систему вместе с одним или несколькими электродвигателями. Блок менеджмента может быть расположен локально (например, в окружности 50 метров от электродвигателя) или удаленно (например, с удаленностью в несколько километров). Блок менеджмента может быть выполнен для того, чтобы при достижении предопределенного состояния выдавать предупреждающее сообщение, чем, например, инициируется техническое обслуживание или чистка электродвигателя. Предпочтительно блок менеджмента является частью среды Industrie 4.0.
В электродвигателе может быть расположена память, которая выполнена для запоминания полученной информации о состоянии и/или показателей и/или выведенный из них других величин. Для наполнения этой памяти при каждом определении состояния может осуществляться запоминание полученных данных. Так, определения состояния могут запускаться периодически, например, каждый раз по истечении одного часа, 12 часов, одного дня, одной недели или одного месяца. При этом интервал мог бы зависеть от скорости ожидаемых изменений состояния. Из заложенной в памяти информации может получаться временная характеристика, которая, в свою очередь, позволяет делать заключения о виде изменения состояния.
Предлагаемый изобретением электродвигатель может быть частью вентилятора. При этом рабочее колесо вентилятора связано с ротором электродвигателя.
Итак, есть разные возможности выполнить и усовершенствовать теорию настоящего изобретения предпочтительным образом. Для этого, с одной стороны, надо сослаться на последующие пункты формулы изобретения вспомогательных пунктов формулы изобретения, а с другой стороны, на последующее пояснение предпочтительных примеров осуществления изобретения с помощью чертежа. В связи с пояснением предпочтительных примеров осуществления изобретения с помощью чертежа поясняются также вообще предпочтительные варианты осуществления и усовершенствованные варианты осуществления изобретения. На чертеже показано:
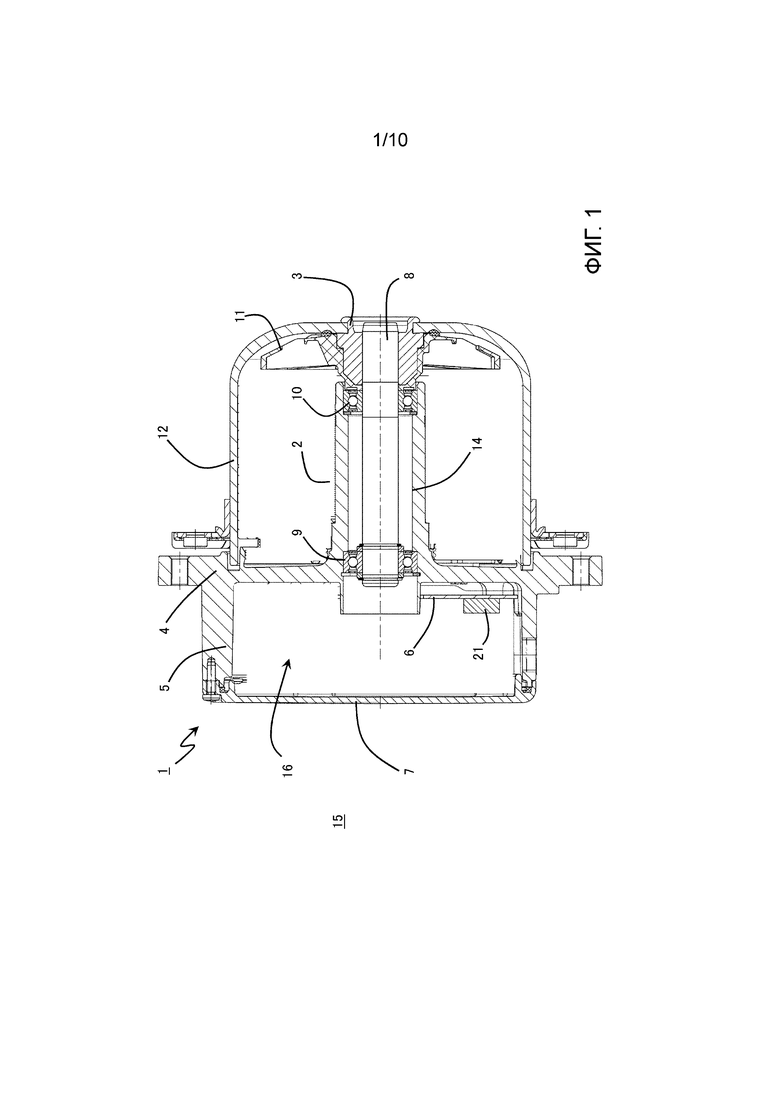
фиг.1: сечение первого примера осуществления предлагаемого изобретением электродвигателя конструкции с внешним ротором, имеющего датчик абсолютного давления, расположенный в корпусе электроники;
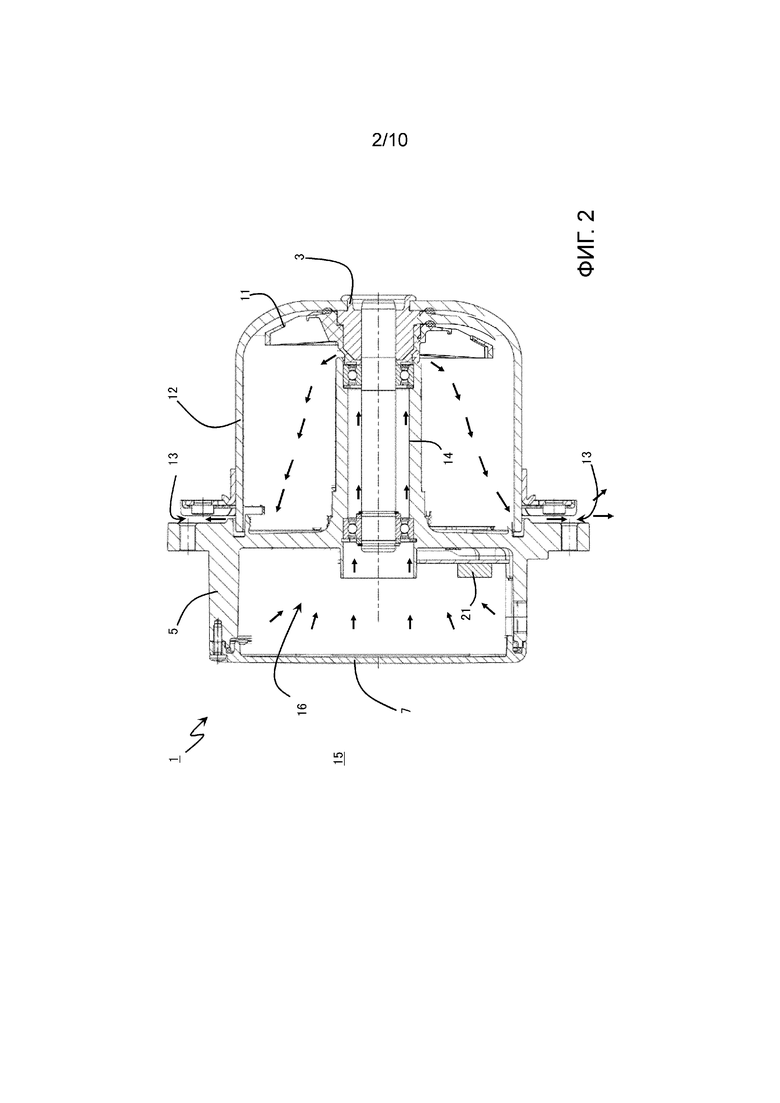
фиг.2: сечение в соответствии с фиг.1 с дополнительно показанными на чертеже стрелками для пояснения движений воздуха;
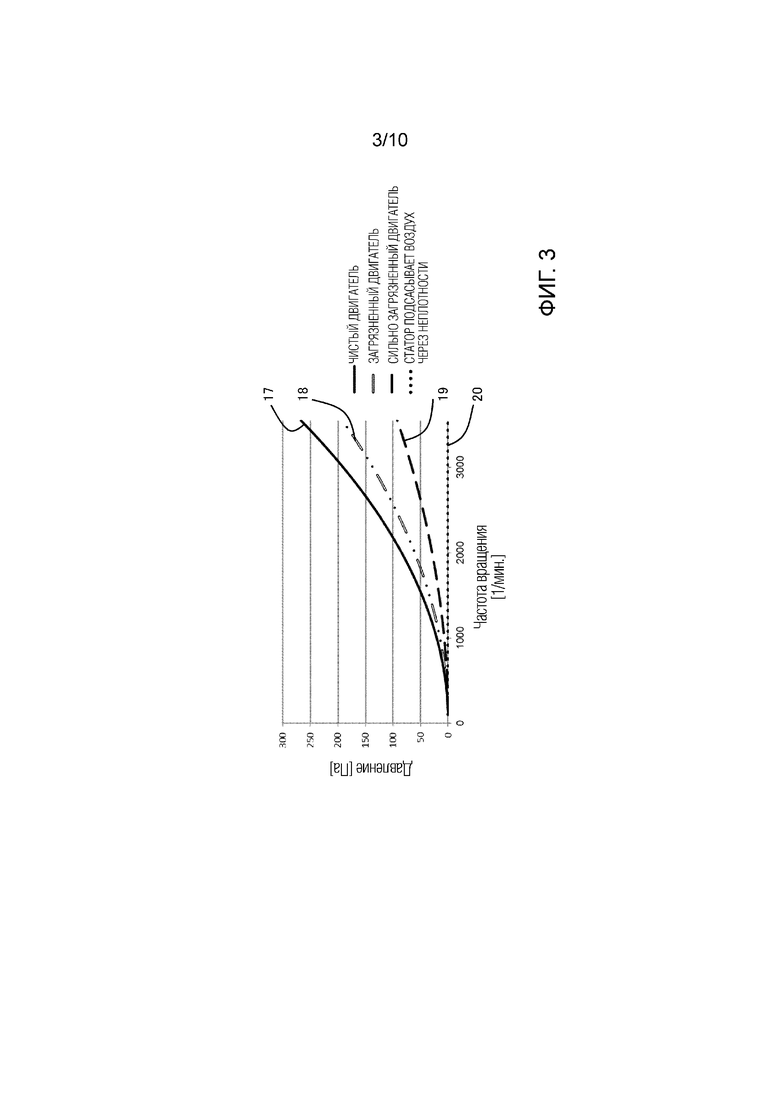
фиг.3: график разности давлений в зависимости от частоты вращения для разных состояний электродвигателя;
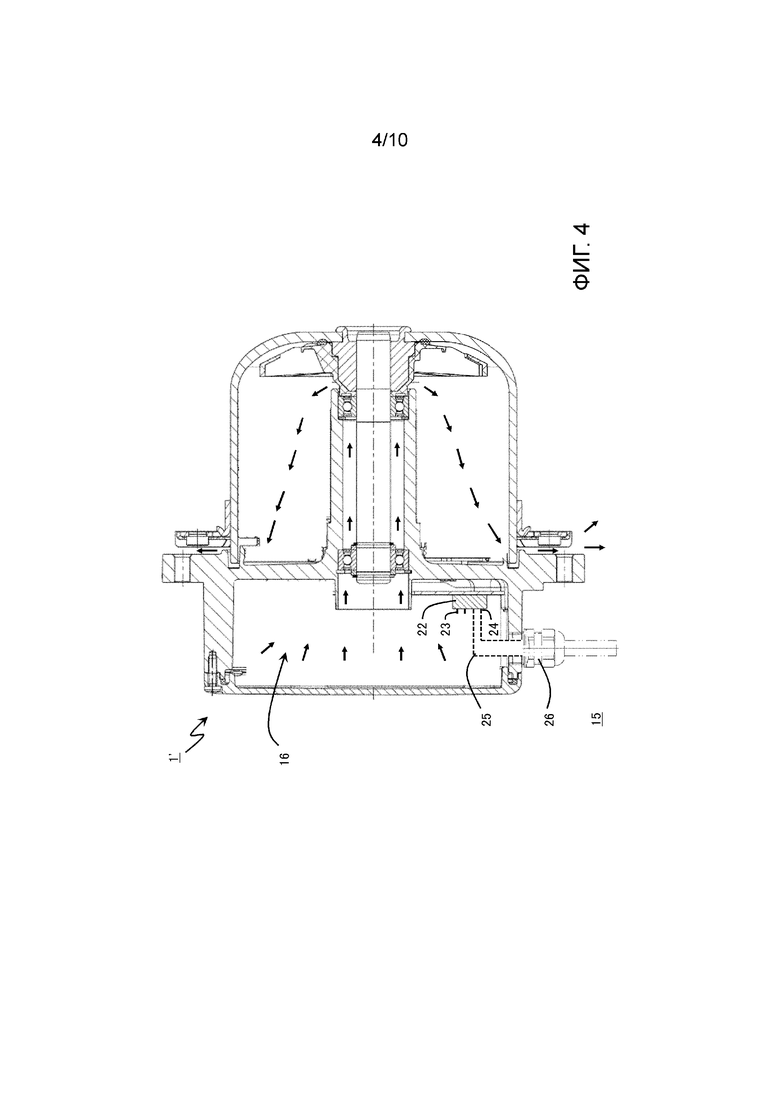
фиг.4: сечение второго примера осуществления предлагаемого изобретением электродвигателя конструкции с внешним ротором, имеющего датчик разности давлений в первом варианте осуществления;
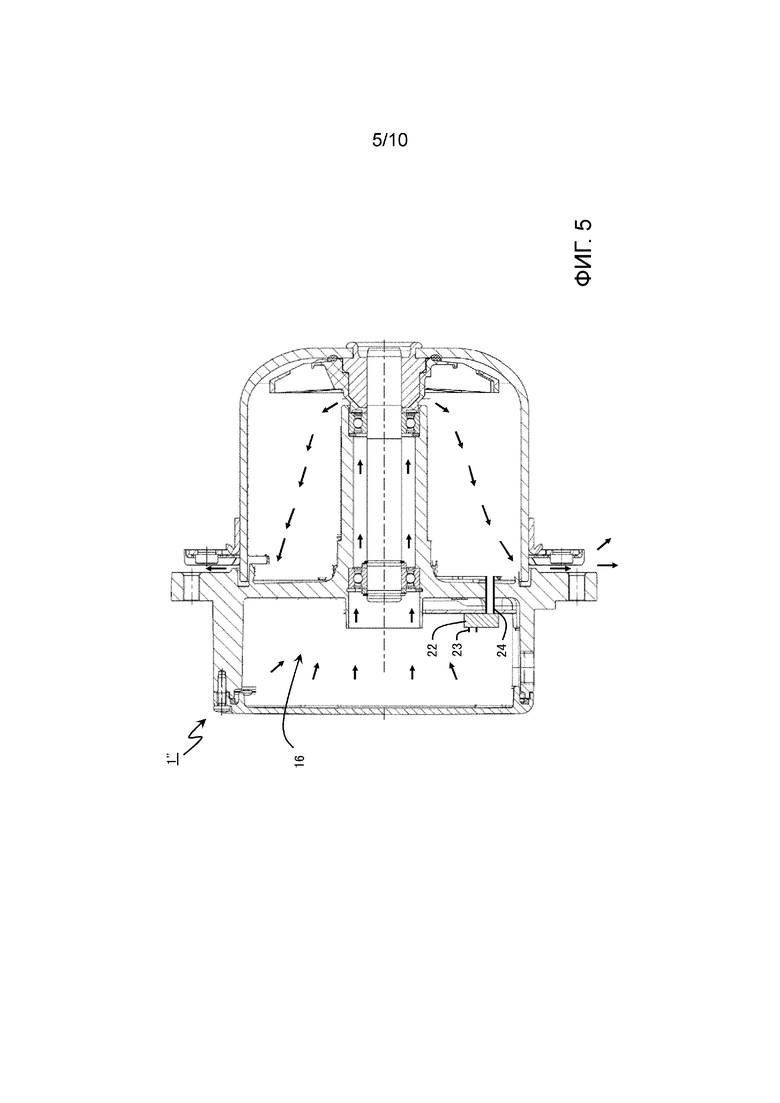
фиг.5: сечение третьего примера осуществления предлагаемого изобретением электродвигателя конструкции с внешним ротором, имеющего датчик разности давлений во втором варианте осуществления;
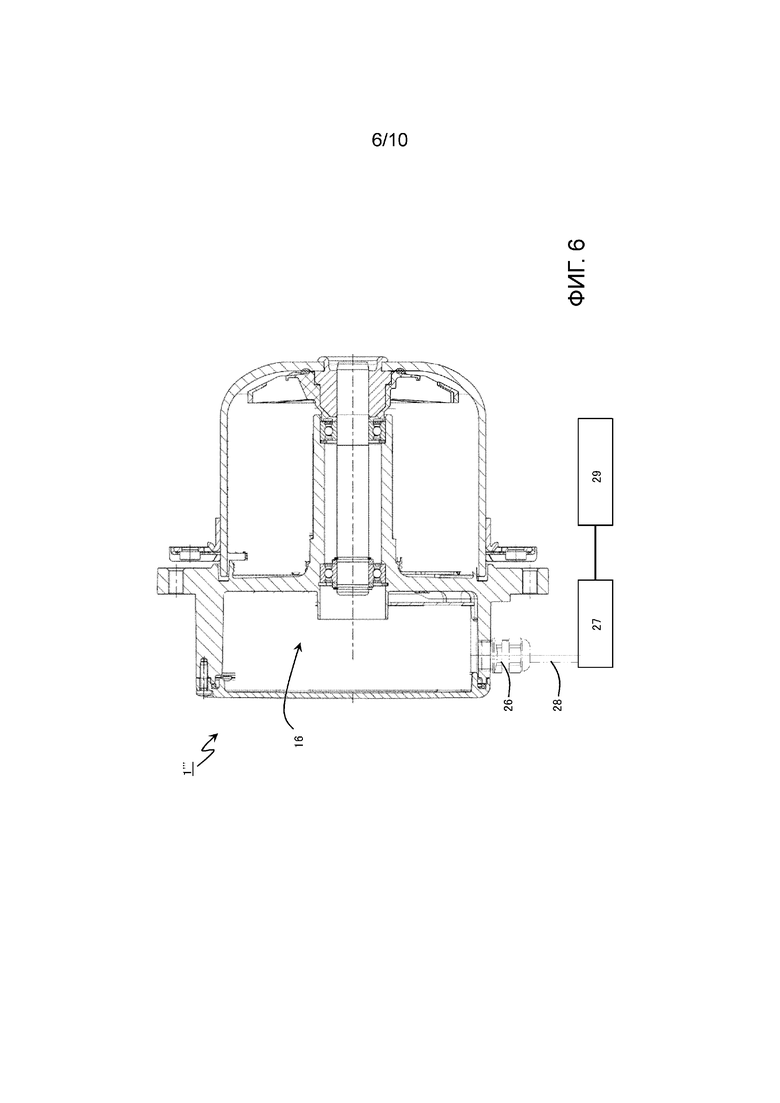
фиг.6: сечение четвертого примера осуществления предлагаемого изобретением электродвигателя конструкции с внешним ротором, имеющего датчик давления, расположенный вне электродвигателя посредством напорного трубопровода;
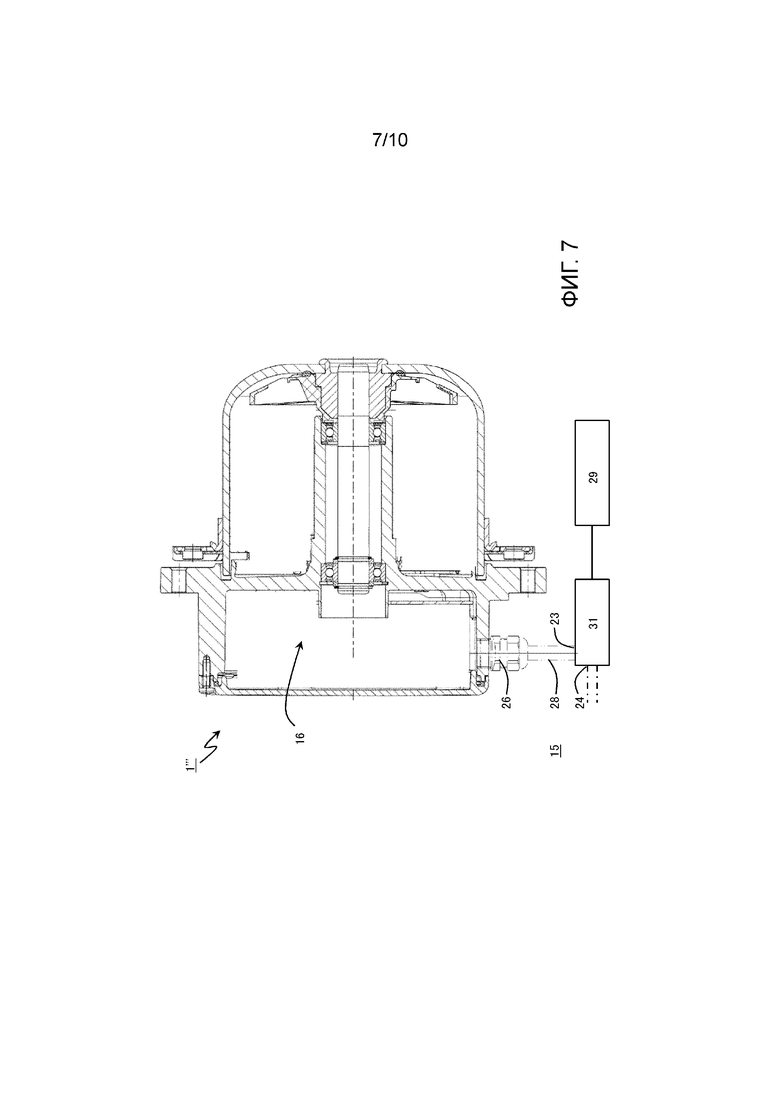
фиг.7: сечение одной из модификаций примера осуществления в соответствии с фиг.6, имеющего внешний датчик разности давлений;
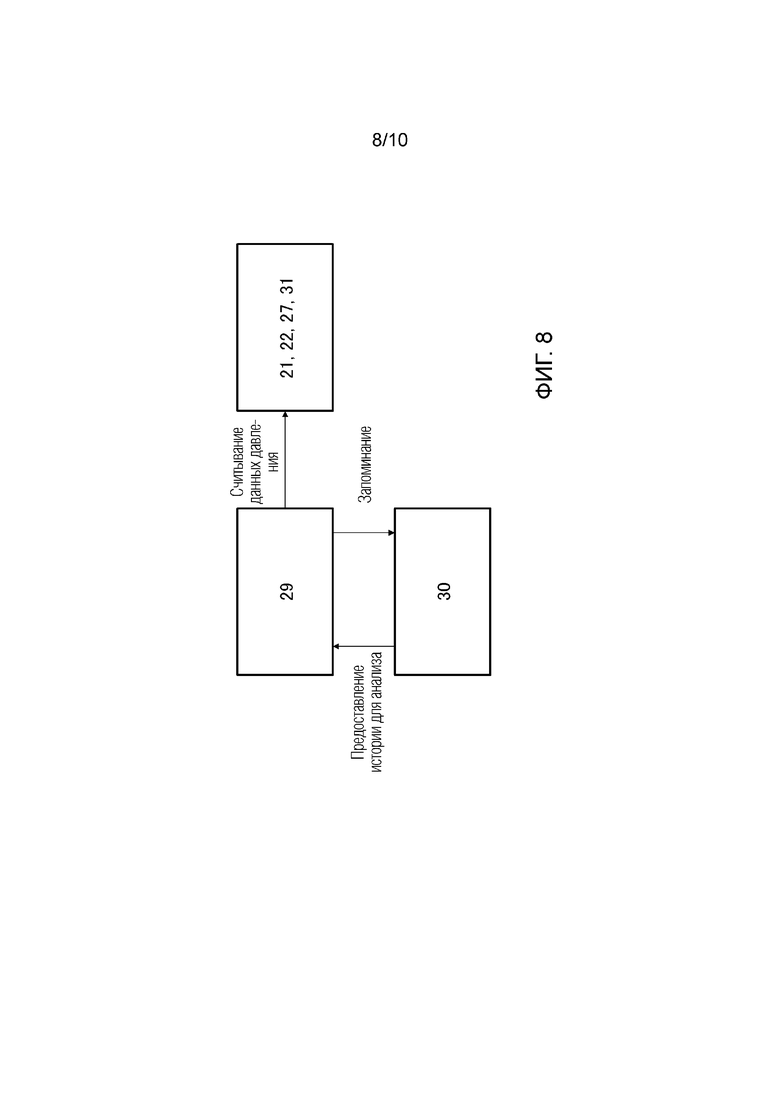
фиг.8: блок-схема основных функциональных элементов схемы для имплементации одного из примеров осуществления предлагаемого изобретением способа;
фиг.9: график, содержащий пример временной характеристики показателя, которая характеризует состояние электродвигателя, и
фиг.9: график, содержащий другой пример временной характеристики показателя.
На фиг.1 показано сечение первого примера осуществления предлагаемого изобретением электродвигателя, который имеет конструкцию с внешнем ротором. При этом - в целях наглядности - опущены некоторые части, которые не имеют значения для понимания изобретения, например, пакеты обмоток для статора и ротора и большая часть электроники двигателя. Электродвигатель 1 включает в себя статор 2 и ротор 3, которые - как уже упоминалось - только обозначены. Статор 2 расположен вокруг втулки 4 статора. На втулке 4 статора выполнен корпус 5 электроники, в котором расположена электроника 6 двигателя (на фиг.1 только обозначена) и который закрыт запорной крышкой 7. Ротор 3 оперт с возможностью вращения вокруг оси 9 двигателя посредством двух подшипников 9, 10. С ротором 3 связано колесо 11 охлаждения, которое нагнетает воздух через электродвигатель 1. Корпус 12 двигателя охватывает электродвигатель и вставлен в лабиринтный зазор, который возникает при этом на втулке 4 статора.
На чертеже фиг.2 показано, как движется воздух при вращательном движении ротора 3. Колесо 11 охлаждения нагнетает воздух через электродвигатель 1, при этом воздух выходит из корпуса 12 двигателя во вращательно-симметричной относительно оси 8 двигателя области 13. Вращательное движение колеса 11 охлаждения способствует, в том числе, тому, чтобы воздух из корпуса электроники всасывался через образованную во втулке статора подшипниковую трубу 14 и нагнетался к области 13. Так как запорная крышка 7 герметизирует корпус 5 электроники относительно окружающей среды 15, в корпусе 5 электроники возникает разность давлений, в этом случае пониженное давление. Это пониженное давление зависит от частоты n вращения ротора. Чем больше частота вращения, тем больше становится пониженное давление. Это пониженное давление зависит от того, насколько беспрепятственно за счет эффектов вентиляции воздух может двигаться в электродвигателе 1, и насколько беспрепятственно воздух может выходить из электродвигателя 1 в области 13. При этом в корпусе 5 электроники образована воздушная камера 16 в смысле настоящего изобретения.
На фиг.3 показаны примерные характеристики пониженного давления в воздушной камере 16 в зависимости от частоты вращения. Самая верхняя кривая 17 (сплошная линия) показывает характеристику давления у чистого двигателя. Это означает, что здесь эффекты вентиляции внутри электродвигателя не ухудшаются или мало ухудшаются грязью. Это состояние называется здесь также «нормальным состоянием». Эта кривая может измеряться, например, при первом вводе в эксплуатацию или при окончательном контроле электродвигателя. Вторая кривая 18 (штрихпунктирная линия) показывает загрязненный двигатель, третья кривая 19 (штриховая линия) сильно загрязненный двигатель. Можно различить, что разность давлений в зависимости от частоты вращения становится все меньше, чем больше грязи ухудшает эффекты вентиляции. Кривой 20 (пунктирная линия) на чертеже показано другое состояние, в котором запорная крышка 7 недостаточно закрывает воздушную камеру. Это приводит к тому, что создаваемое эффектами вентиляции пониженное давление непосредственно может компенсироваться подтекающим воздухом. Можно различить, что пониженное давление практически не может образовываться даже при возрастающей частоте вращения. Поэтому может делаться заключение, что двигатель подсасывает «воздух через неплотности».
Для установления давления в воздушной камере 16 в воздушной камере 16 расположен датчик 21 абсолютного давления, который измеряет давление воздуха в воздушной камере. В примере осуществления в соответствии с фиг.1 этот датчик 21 давления расположен на плате электроники 6 двигателя. Фактическая разность давлений между воздушной камерой 16 и окружающей средой 16 регистрируется таким образом, что в воздушной камере 16 при частоте вращения n=0 оборотов/мин. в момент t1 времени имеется давление воздуха окружающей среды 15. В момент t2 времени измерения при частоте вращения n≠0 оборотов/мин. тот же самый датчик 21 абсолютного давления измеряет давление во внутреннем пространстве корпуса электроники. Таким образом фактическая разность давлений может рассчитываться из этих двух результатов измерения давления в момент t1 времени и в момент t2 времени.
На фиг.4 показан второй пример осуществления предлагаемого изобретением электродвигателя 1'. Этот пример осуществления большей частью похож на первый пример осуществления, при этом вместо датчика 21 абсолютного давления теперь используется датчик 22 разности давлений. Этот датчик 22 разности давлений имеет первый разъем 23 и второй разъем 24. Первый разъем 23 направляет введенное там давление на первую поверхность датчика, в то время как второй разъем 24 направляет введенное там давление на вторую поверхность датчика. Датчик 22 разности давлений измеряет разность давлений между первой поверхностью датчика и второй поверхностью датчика и вместе с тем между введенным в первый разъем 23 давлением и введенным во второй разъем 24 давлением. В этом примере осуществления на первый разъем 23 подвергается воздействию давления воздуха в воздушной камере 16. Второй разъем 24 через напорный трубопровод 25 и ввод 26 подергается воздействию давления воздуха окружающей среды 15. Таким образом датчик 22 разности давлений может непосредственно изменять фактическую разность давлений между воздушной камерой 16 и окружающей средой 15, без необходимости изменения частоты вращения. Однако частота вращения должна быть тогда не равна 0 оборотов/мин.
На фиг.5 изображен третий пример осуществления предлагаемого изобретением электродвигателя 1'', который тоже использует датчик 22 разности давлений. Первый разъем 23 датчика 22 разности давлений, в свою очередь, подвергается воздействию давления воздуха в воздушной камере 16. Второй разъем 24 расположен на обращенной к втулке 4 статора стороне датчика 22 разности давлений и сквозь втулку 4 статора законтактирован в пространстве ротора. И при этом примере осуществления датчик 22 разности давлений может определять фактическую разность давлений, которая зависит от степени загрязнения колеса 11 охлаждения и/или в области 13.
На фиг.6 показан четвертый пример осуществления предлагаемого изобретением электродвигателя 1'''. Этот пример осуществления больше частью похож на другие примеры осуществления. Однако вместо внутреннего датчика 21, 22 давления внутри воздушной камеры 15 здесь использован «внешний» датчик 27 давления, который через ввод 26 посредством напорного трубопровода 28 соединен с воздушной камерой 16. Так как, благодаря напорному трубопроводу 28, давление воздуха внутри воздушной камеры 16 приблизительно равно давлению воздуха в измерительной камере у датчика 27 давления, с помощью датчика 27 давления может измеряться репрезентативное для воздушной камеры 16 значение давления. Затем измеренные с помощью датчика 27 давления значения давления вводятся в блок 29 оценки.
На фиг.7 показана одна из модификаций четвертого примера осуществления предлагаемого изобретением электродвигателя 1''' в соответствии с фиг.6. При этом применяемая система датчиков давления - аналогично фиг.4 - образована одним датчиком 31 разности давлений. Давление в воздушной камере 16 подается по напорному трубопроводу 28 на первый разъем 23 датчика 31 разности давлений, в то время как давление воздуха окружающей среды 15 действует на втором разъеме 24. Регистрация фактической разности давлений соответствует описанию, изображенному на фиг.4.
На фиг.8 показана блок-схема, включающая в себя основные функции схемы для имплементации одного из примеров осуществления предлагаемого изобретением способа. Блок 29 оценки регистрирует результаты измерений датчика 21, 22, 27, 31 давления или нескольких датчиков давления и ставит их в соотношение с частотой вращения n двигателя. При этом блок 29 оценки может выполнять роль оперирования данными (связь) и оценки (анализ). Память 30 соединена с блоком 29 оценки и может использоваться для запоминания фактической разности давлений, частоты вращения, показателя и/или определенного состояния. При анализе текущих сенсорных данных блок 29 оценки может обращаться к заложенным в памяти 30 значениям.
Блок 29 оценки представляет собой предпочтительно интегрированный микропроцессор EC-двигателя, при этом коммуникативные и аналитические задачи настоящего изобретения могут также выполняться внешними вычислительными блоками. В качестве примера можно назвать: прибор регулирования, ПЛК (программируемый логический контроллер), межсетевой шлюз, облачный компьютер и пр.
В последующей таблице указаны результаты измерений пониженного давления p (в Паскалях) и соответствующей частоты вращения n. Первая колонка содержит дату измерения, четвертая колонка показатель k, который был рассчитан по
 :
:
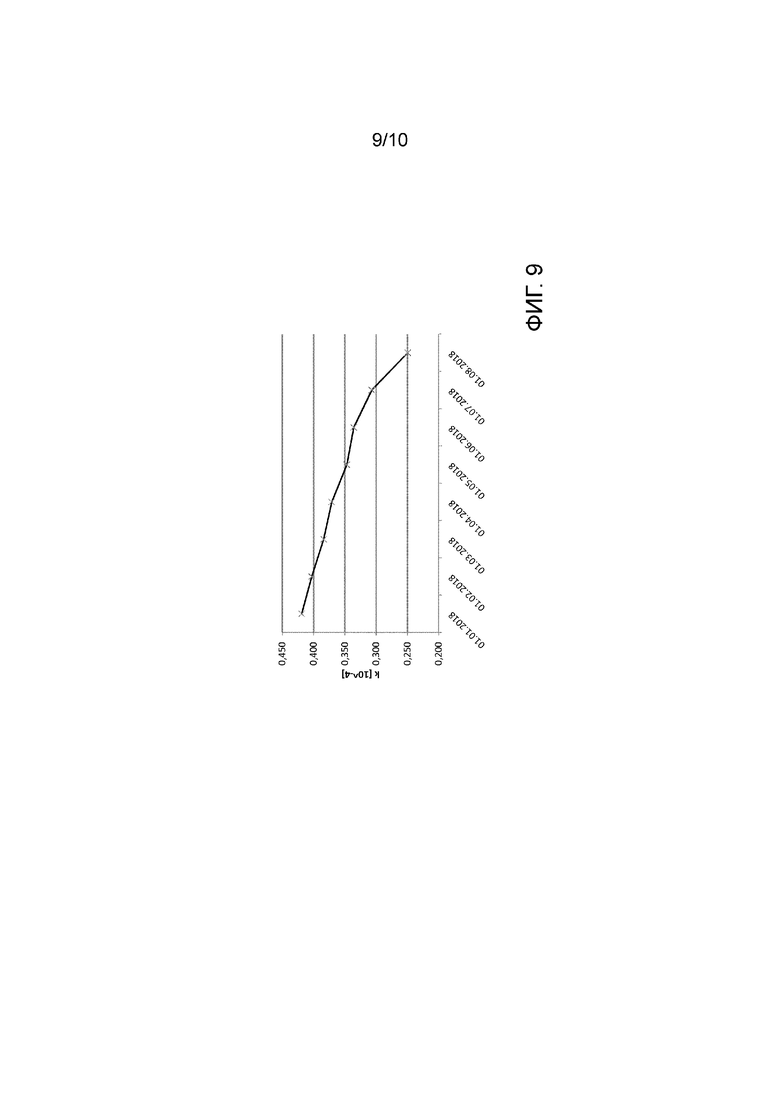
Эти значения нанесены на графике в соответствии с фиг.9. Показатель k может рассматриваться как критерий чистоты двигателя. Чем меньше значение этого показателя k, тем ниже чистота электродвигателя, или, соответственно, тем выше его загрязнение.
Если электродвигатель был введен в эксплуатацию 1 января 2018 г., то показатель k=0,419 ⋅ 10-4 соответствует чистому двигателю, нормальному состоянию. Могут задаваться пороговые значения, начиная с которых нормального состояния больше нет. Так, могут быть заданы пороговые значения 0,300 и 0,375, при этом, например, при 0,300 < k < 0,375 двигатель расценивается как «загрязненный», а при k < 0,300 как «сильно загрязненный». Это означает, что двигатель до 1 марта 2018 г. находится в «нормальном состоянии». 1 апреля 2018 г. впервые превышается первое пороговое значение 0,375, так что предупреждающее сообщение может показывать слегка загрязненный двигатель. 1 августа 2018 г. превышается второе пороговое значение 0,300, так что предупреждающее сообщение может указывать на сильно загрязненный двигатель.
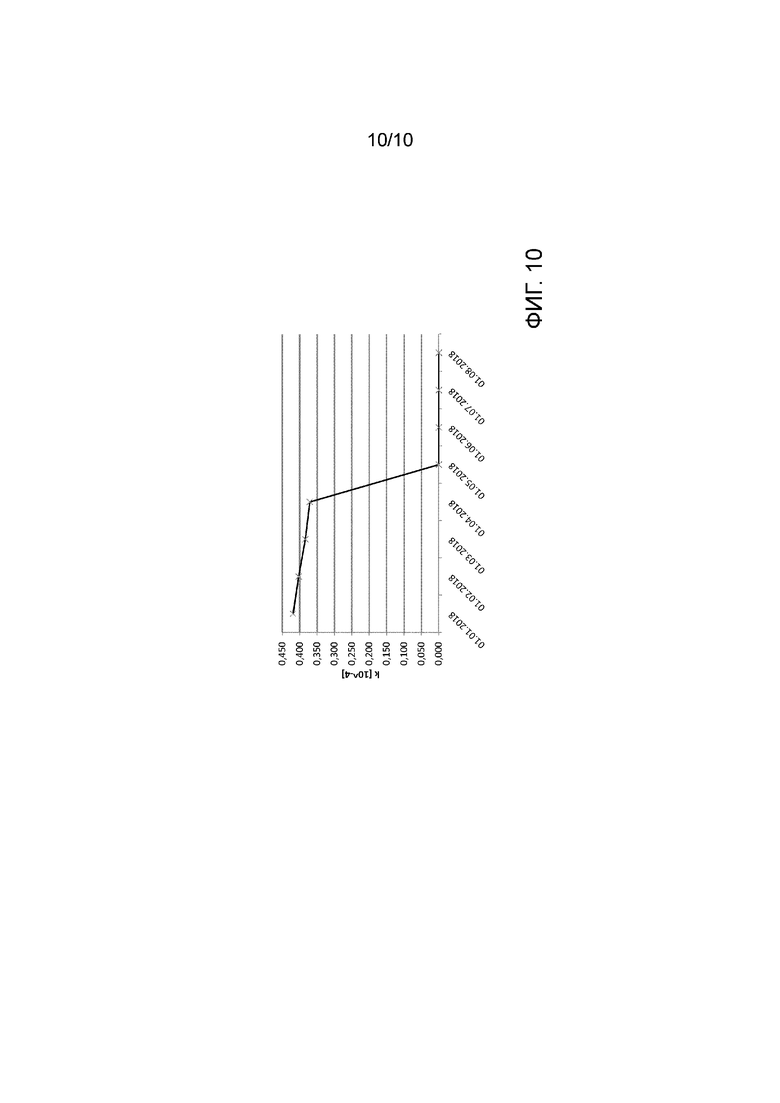
На фиг.10 показан другой сценарий. Между 1 апреля 2018 г. и 1 мая 2018 г. возникло механическое повреждение, из-за чего двигатель тянет воздух через неплотности. Поэтому разность давлений приблизительно равна 0. При этом сценарии 1 мая 2018 г. может делаться заключение о состоянии «негерметичный». Предупреждающее сообщение может запускать техническое обслуживание электродвигателя.
В отношении других предпочтительных вариантов осуществления предлагаемого изобретением способа, предлагаемого изобретением электродвигателя и предлагаемого изобретением вентилятора во избежание повторов ссылаемся на общую часть описания, а также на прилагаемые пункты формулы изобретения.
Наконец, следует непосредственно указать, что описанные выше примеры осуществления служат только для рассмотрения заявленной теории, однако не ограничивают ее этими примерами осуществления.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1, 1', 1'', 1''' - Электродвигатель
2 Статор
3 Ротор
4 Втулка статора
5 Корпус электроники
6 Электроника двигателя
7 Запорная крышка
8 Ось двигателя
9 Подшипник
10 Подшипник
11 Колесо охлаждения
12 Корпус двигателя
13 Область (выпуска воздуха)
14 Подшипниковая труба
15 Окружающая среда
16 Воздушная камера
17 Кривая чистого двигателя
18 Кривая загрязненного двигателя
19 Кривая сильно загрязненного двигателя
20 Кривая при «негерметичном» двигателе
21 Датчик абсолютного давления
22 Датчик разности давлений
23 Первый разъем
24 Второй разъем
25 Напорный трубопровод
26 Ввод
27 Внешний датчик давления
28 Напорный трубопровод
29 Блок оценки
30 Память
31 Внешний датчик разности давлений
Изобретение относится к области электротехники. Технический результат - обеспечение надежного способа определения степени загрязнения и/или негерметичности электродвигателя. Способ определения состояния загрязнения и/или негерметичности электродвигателя включает в себя этапы установления фактической разности (p) давлений между воздушной камерой (16) и окружающей средой (15) электродвигателя (1, 1', 1'', 1'''), установления фактической частоты (n) вращения ротора (3), расчета показателя (k) степени загрязнения и/или негерметичности на основе фактической разности (p) давлений и фактической частоты (n) вращения, вследствие которого получают показатель (k) степени загрязнения и/или негерметичности, репрезентативный для упомянутого состояния электродвигателя. Затем показатель (k) степени загрязнения и/или негерметичности сравнивают с пороговым значением, а состояние загрязнения и/или негерметичности электродвигателя (1, 1', 1'', 1''') определяют на основе результата сравнения упомянутого показателя (k) с пороговым значением. 3 н. и 14 з.п. ф-лы, 10 ил.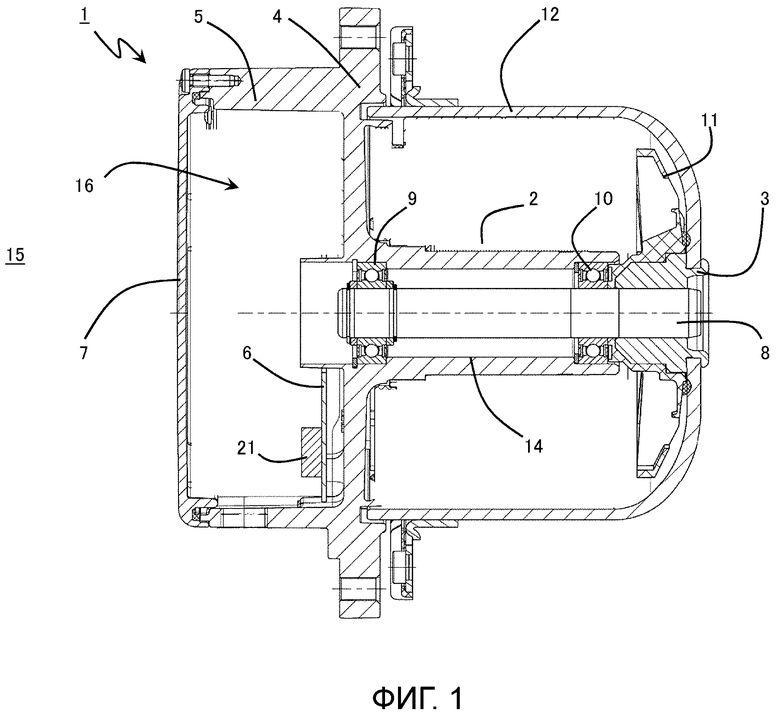
1. Способ определения состояния загрязнения и/или негерметичности электродвигателя, который имеет статор (2) и ротор (3), опертый с возможностью вращения относительно статора (2) , при этом вследствие вращательного движения ротора (3) в воздушной камере (16) внутри электродвигателя (1, 1', 1'', 1''') создается разность (p) давлений относительно окружающей среды (15) электродвигателя (1, 1', 1'', 1'''), при этом в нормальном состоянии электродвигателя (1, 1', 1'', 1''') разность давлений зависит от фактической частоты (n) вращения ротора (3), включающий в себя этапы:
установление фактической разности (p) давлений между воздушной камерой (16) и окружающей средой (15) электродвигателя (1, 1', 1'', 1'''),
установление фактической частоты (n) вращения ротора (3) и
расчет показателя (k) степени загрязнения и/или негерметичности на основе фактической разности (p) давлений и фактической частоты (n) вращения, вследствие которого получают показатель (k) степени загрязнения и/или негерметичности, репрезентативный для упомянутого состояния электродвигателя,
причем показатель (k) степени загрязнения и/или негерметичности сравнивают с пороговым значением, и состояние загрязнения и/или негерметичности электродвигателя (1, 1', 1'', 1''') определяют на основе результата сравнения упомянутого показателя (k) с пороговым значением.
2. Способ по п.1, отличающийся тем, что показатель (k) степени загрязнения и/или негерметичности рассчитывают как отношение фактической разности (p) давлений и квадрата фактической частоты (n) вращения.
3. Способ по любому из пп.1 или 2, отличающийся тем, что показатель (k) степени загрязнения и/или негерметичности нормируют до референтного значения, причем референтное значение предпочтительно определяют при первом вводе в эксплуатацию электродвигателя и/или при окончательном контроле после изготовления электродвигателя.
4. Способ по любому из пп.1-3, отличающийся тем, что фактическую разность (p) давлений определяют на основе значений (p) давления, которые измеряют посредством датчика (21, 27) абсолютного давления для воздушной камеры (16) при различных фактических частотах вращения, при этом предпочтительно первое измерение выполняют при останове электродвигателя (1, 1'''), а второе измерение - при фактической частоте вращения, неравной 0.
5. Способ по любому из пп.1-3, отличающийся тем, что фактическую разность (p) давлений измеряют посредством двух датчиков абсолютного давления, при этом к первому датчику (21, 27) абсолютного давления прикладывают давление в воздушной камере (16), а второй датчик абсолютного давления измеряет давление воздуха, которое является репрезентативным для давления в окружающей среде электродвигателя.
6. Способ по любому из пп.1-3, отличающийся тем, что фактическую разность (p) давлений измеряют посредством датчика (22, 31) разности давлений, при этом первую поверхность датчика упомянутого датчика (22, 31) разности давлений подвергают воздействию давления в воздушной камере, а вторую поверхность датчика упомянутого датчика (22) разности давлений подвергают воздействию давления в окружающей среде (15) электродвигателя (1', 1'', 1''').
7. Способ по любому из пп.1-6, отличающийся тем, что определенное состояние электродвигателя (1, 1', 1'', 1''') описывает загрязнение электродвигателя (1, 1', 1'', 1''') и/или негерметичность электродвигателя (1, 1', 1'', 1''').
8. Способ по любому из пп.1-7, отличающийся тем, что при установлении фактической разности давлений на протяжении измерения устанавливают несколько разностей давлений, и фактическую разность давлений предпочтительно рассчитывают посредством получения среднего значения из упомянутых нескольких разностей давлений.
9. Электродвигатель для осуществления способа по любому из пп.1-8, имеющий статор (2), ротор (3), опертый с возможностью вращения относительно статора (2), и образованную внутри электродвигателя воздушную камеру (16), при этом в нормальном состоянии электродвигателя (1, 1', 1'', 1''') ротор (3) вследствие своего вращательного движения создает в воздушной камере (16) разность давлений относительно окружающей среды (15) электродвигателя (1, 1', 1'', 1'''), при этом электродвигатель (1, 1', 1'', 1''') включает в себя дополнительно систему датчиков давления, систему установления частоты вращения и блок (24) оценки, при этом система датчиков давления выполнена для установления фактической разности давлений между окружающей средой (15) электродвигателя (1, 1', 1'', 1''') и воздушной камерой (16), при этом система установления частоты вращения выполнена для установления фактической частоты (n) вращения ротора (3), и при этом блок (29) оценки выполнен для того, чтобы на основе фактической разности давлений и фактической частоты вращения определять состояние загрязнения и/или негерметичности электродвигателя (1, 1', 1'', 1''').
10. Электродвигатель по п.9, отличающийся колесом (11) охлаждения, которое связано с ротором (3), причем колесо (11) охлаждения вызывает разность давлений в воздушной камере (16).
11. Электродвигатель по п.9 или 10, отличающийся выпуском (13) воздуха, предпочтительно имеющим ребра статора-ротора и/или лабиринтный зазор, при этом предпочтительно степень загрязнения выпуска (13) воздуха влияет на фактическую разность давлений в воздушной камере (16).
12. Электродвигатель по любому из пп.9-11, отличающийся тем, что система датчиков давления образована датчиком (21, 27) абсолютного давления, имеющим базирующийся на частоте вращения вычислительный блок, двумя датчиками абсолютного давления или датчиком (22, 31) разности давлений.
13. Электродвигатель по любому из пп.9-12, отличающийся тем, что воздушная камера (16) выполнена в корпусе (5) электроники, который выполнен в или на электродвигателе (1, 1', 1'', 1'''), причем упомянутый корпус (5) электроники предпочтительно выполнен на втулке (4) статора электродвигателя (1, 1', 1'', 1''').
14. Электродвигатель по любому из пп.9-13, отличающийся тем, что электродвигатель (1, 1', 1'', 1''') представляет собой EC-двигатель (электронно-коммутируемый двигатель) и/или двигатель с внешним ротором.
15. Электродвигатель по любому из пп.9-14, отличающийся блоком связи, который выполнен для того, чтобы посылать информацию о состоянии, полученную посредством блока (29) оценки, в блок менеджмента.
16. Электродвигатель по любому из пп.9-15, отличающийся памятью (30), при этом полученная посредством блока (29) оценки информация о состоянии и/или показатели и/или выведенные из них дополнительные величины сохраняются в памяти (30).
17. Вентилятор, имеющий электродвигатель по любому из пп.9-16, при этом ротор (3) электродвигателя (1, 1', 1'', 1''') связан с рабочим колесом вентилятора.
| WO 2016044426 A1, 24.03.2016 DE 102015105188 A1, 06.10.2016 CN 109038961 A, 18.12.2018 US 7539549 B1, 26.05.2009 RU 2548678 C2, 20.04.2015 RU 2569214 C2, 20.11.2015. |

