Данное изобретение касается способа оценки готовности к эксплуатации электродвигателя, в частности, электродвигателя вентилятора, предпочтительно во время первоначального ввода в эксплуатацию. Данное изобретение касается, далее, электродвигателя, а также вентилятора.
Электродвигатели во время их работы подвержены вибрациям самого разного вида. Эти вибрации могут возникать за счет самого электродвигателя, из-за приводимой нагрузки или из-за окружения, в котором установлен электродвигатель. Если электродвигатель является, например, компонентом вентилятора, то дисбаланс рабочего колеса может вызывать вибрацию. К тому же, неравномерный приводной момент, который может возникнуть, например, из-за пульсирующего постоянного напряжения промежуточного контура, может дополнительно усиливать вибрации. Если вентилятор установлен в промышленной среде, которая переносит вибрации на вентилятор, то вентилятор испытывает дополнительные вибрации.
Двигатели или, соответственно, вентиляторы обычно перед отправкой заказчику или, соответственно, перед встраиванием в корпус динамически балансируются, вследствие чего снижаются несимметричные распределения масс или иные обстоятельства, вызывающие вибрации. Однако, уже при встраивании в корпус, при транспортировке к заказчику, при монтаже в системе заказчика или у конечного потребителя это может привести к повреждениям, которые ухудшают качество балансировки. Если вентилятор эксплуатируется в среде с липким загрязнением, например, в сельском хозяйстве или в высококоррозионных окружающих условиях, то в течение ресурса вентилятора качество балансировки тоже ухудшается.
Дисбаланс ведет к усиленным вибрациям, которые в свою очередь очень сильно нагружают компоненты электродвигателя. Так, например, подшипники под действием вибраций нагружаются значительно сильнее, чем это имело бы место в системе с меньшими вибрациями. С другой стороны, вибрации нагружают электронное оборудование, которое интегрировано в электродвигатель. Это может привести к ослаблению мест пайки, к разрушению конструктивных элементов или даже к разлому печатных плат. В итоге высокий уровень вибрации может привести к значительному сокращению ресурса электродвигателя и/или его компонентов.
В патенте EP 2 972 431 B1 раскрыт электродвигатель с функциональным контролем подшипника двигателя. Для этого на фланце статора, на его обращенной от ротора стороне закреплен датчик вибраций, который измеряет вибрации электродвигателя. Таким образом можно детектировать, если с подшипником электродвигателя возникают проблемы. Однако, при этом проблемы обнаруживаются лишь тогда, когда они уже находятся на относительно далеко зашедшей стадии.
Поэтому в основу данного изобретения положена задача предложить способ, электродвигатель и вентилятор указанного вначале рода и усовершенствовать их таким образом, чтобы можно было гарантировать безопасный и надежный режим эксплуатации.
Согласно изобретению, сформулированная выше задача решается признаками независимого пункта 1 формулы изобретения. В соответствии с этим рассматриваемый способ включает в себя следующие этапы:
инициирование процесса разгона электродвигателя, причем частота вращения во время процесса разгона изменяется по нескольким ступеням частоты вращения.
генерирование по меньшей мере одного измеренного значения путем соответствующего измерения физической величины с помощью датчика электродвигателя при по меньшей мере одной из ступеней частоты вращения,
загрузку по меньшей мере одной параметрической информации (информации о параметре/параметрические данные) из блока памяти параметров электродвигателя, причем упомянутая по меньшей мере одна параметрическая информация соответствует сгенерированному по меньшей мере одному измеренному значению, и
оценку упомянутого по меньшей мере одного измеренного значения для по меньшей мере одной из ступеней частоты вращения с применением загруженной по меньшей мере одной параметрической информации.
В отношении электродвигателя поставленная задача решается признаками независимого пункта 15 формулы изобретения. В соответствии с ними электродвигатель, который предпочтительно выполнен с возможностью осуществления предлагаемого изобретением способа, содержит блок памяти параметров и интерфейс для передачи параметрических данных, причем блок памяти параметров выполнен для сохранения параметрических данных, переданных через интерфейс во время процесса параметризации.
В отношении вентилятора поставленная выше задача решается признаками независимого пункта 17 формулы изобретения, согласно которому вентилятор содержит предложенный изобретением электродвигатель и рабочее колесо, причем рабочее колесо соединено с ротором электродвигателя.
В соответствии с изобретением впервые было установлено, что во многих случаях возникающие проблемы заявляют о себе уже очень рано. Так, уже при первоначальном вводе в эксплуатацию электродвигателя можно оценить, может ли эксплуатироваться электродвигатель в текущих условиях и как долго. Поэтому согласно изобретению, готовность к эксплуатации электродвигателя оценивается и предпочтительно уже при первоначальном вводе в эксплуатацию электродвигателя после доставки и установке в производственной среде.
Для того, чтобы была возможность такого рода проверки готовности к эксплуатации электродвигателя, в распоряжение электродвигателя, согласно изобретению, предоставляются параметрические данные, которые позволяют оценивать режим работы электродвигателя. Эти параметрические данные выходят за рамки обычно имеющихся у электродвигателя параметров, таких, например, как номинальная частота вращения или номинальный момент. Так как параметрические данные могут давать обширную информацию о конструкции электродвигателя и условиях его установки и эксплуатации. Так, параметрические данные могут включать в себя контрольные значения, конструктивную информацию об электродвигателе, конструктивную информацию о приводимой электродвигателем нагрузке (например, о рабочем колесе вентилятора), характеристики электродвигателя, характеристики компонентов и/или информацию о его эксплуатационных свойствах. Эти параметрические данные используются в предложенном изобретением способе оценки готовности к эксплуатации электродвигателя, чтобы оценить сгенерированные измеренные значения. Такая оценка измеренных значений позволяет в свою очередь делать выводы о том, готов ли электродвигатель в целом к эксплуатации.
Согласно изобретению, сначала инициируется процесс разгона электродвигателя. Во время этого процесса разгона частота вращения изменяется по нескольким ступеням частоты вращения. При этом не имеет принципиального значения, как изменяется частота вращения. Частота вращения может изменяться в порядке возрастания или убывания. Возможно даже, что частота вращения относительно любым образом скачет между значениями разной величины. Важно только, чтобы электродвигатель работал при нескольких частотах вращения, чтобы можно было оценить поведение электродвигателя при различных частотах вращения. Поскольку электродвигатель при приложении питающего напряжения обычно находится в состоянии останова, и тем самым частота вращения равна нулю, то частота вращения предпочтительно изменяется от нижней частоты вращения к верхней частоте вращения. При этом нижняя частота вращения предпочтительно образована частотой вращения, равной нулю - останов электродвигателя -, а верхняя частота вращения предпочтительно образована номинальной частотой вращения электродвигателя. При изменении частоты вращения ступени частоты вращения могут быть эквидистантны относительно друг друга. Однако, возможно также, что промежутки между ступенями частоты вращения больше не коррелируются друг с другом. Для предотвращения ненужной нагрузки на электродвигатель из-за замены одной частоты вращения на следующую частоту вращения предлагается, чтобы частота вращения изменялась непрерывно или квази непрерывно между ступенями частоты вращения.
На следующем этапе генерируется по меньшей мере одно измеренное значение. Это измеренное значение или, соответственно, любое из измеренных значений возникает при этом путем соответствующего измерения физической величины с помощью датчика электродвигателя при по меньшей мере одной из ступеней частоты вращения. Это означает, что при нескольких измеренных значениях одна физическая величина измеряется одним датчиком при нескольких ступенях частоты вращения, или одна физическая величина измеряется несколькими датчиками при одной или нескольких частотах вращения, или несколько физических величин измеряется несколькими датчиками при нескольких ступенях частоты вращения. Какие из физических величин, которые в принципе могут быть измерены у этого электродвигателя, измеряются на этом этапе, зависит от вида оценки готовности к эксплуатации. При этом соответствующие физические величины определяются посредством по меньшей мере одного датчика электродвигателя. «Датчиком электродвигателя» может быть любой датчик, который интегрирован в электродвигатель или в электронику электродвигателя. В принципе это может быть датчик, который интегрирован в закрепленный снаружи на электродвигателе блок электроники двигателя, например, прифланцованный к кожуху двигателя блок электроники двигателя.
На следующем этапе по меньшей мере одна параметрическая информация загружается из блока памяти параметров электродвигателя. При этом параметрические данные предпочтительно во время процесса параметризации передаются в блок памяти параметров и там сохраняются. Этот процесс параметризации в дальнейшем еще будет рассмотрен более подробно. В отношении упомянутой по меньшей мере одной параметрической информации важно, чтобы соответствующая загруженная параметрическая информация непосредственно или опосредованно соответствовала соответствующему сгенерированному измеренному значению. Параметрическая информация может соответствует, например, непосредственно измеренному значению, если измеренное значение указывает на вибрацию электродвигателя, а параметрическая информация показывает максимально допустимую вибрацию. При этом параметрическая информация чаще всего могла бы относиться к той же физической величине, что и измеренное значение. Опосредованно соответствующая параметрическая информация может быть образована, например, конструктивной информацией об электродвигателе или о размерах электродвигателя. Такого рода параметрические данные могут иметь опосредованное влияние на измеренную величину. Так, например, размеры электродвигателя могут иметь влияние на вибрации электродвигателя, так что эта параметрическая информация опосредованно соответствует измеренному значению вибрации. Путем выбора соответственно корреспондирующих параметрических данных может быть гарантировано, что возможна оценка сгенерированного измеренного значения с использованием загруженной параметрической информации.
С применением загруженной по меньшей мере одной параметрической информации на следующем этапе производится оценка упомянутого по меньшей мере одного измеренного значения. Эта оценка может включать в себя, например, соблюдение предельного значения. Однако, возможна также проверка того, может ли сгенерированное измеренное значение подходить указанной в параметрической информации геометрической информации, или, например, было ли предпринято дополнительно изменение электродвигателя или соединенной с электродвигателем нагрузки, или не был ли электродвигатель поврежден во время транспортировки.
«Физическая величина» может быть образована различными величинами внутри электродвигателя. В принципе это может быть также напряжение на катушке статора или ротора или ток через катушку статора или ротора. Предпочтительно эти физические величины относятся, однако, к механическим величинам и/или магнитным величинам, и/или температуре. В качестве примера такого рода физических величин, однако, не ограничиваясь ими, следует сослаться на частоту вращения ротора электродвигателя, вибрации, ускорения, перепады давления и/или углы наклона. В зависимости от измеряемой физической величины выполнен соответствующий датчик. Так, например, ускорения могут определяться датчиком ускорения, перепады давления - датчиком давления или микрофоном, а температуры - датчиком температуры. Возможно также, что несколько датчиков определяют физические величины, например, в различных местах электродвигателя.
Значение термина «готовность к эксплуатации» электродвигателя зависит от разных условий. Так, например, электродвигатель мог быть установлен с недопустимой пространственной ориентацией, которая ведет к слишком большой нагрузке на подшипник или слишком большой нагрузке на ротор или на соединенную с ротором нагрузку. Вследствие этого может существенно сократиться ресурс электродвигателя. В этом случае электродвигатель, хотя и может в принципе эксплуатироваться, однако, все же необходимо проанализировать общую готовность к эксплуатации. Возможно также, что электродвигатель во время своей работы испытывает очень высокую вибрационную нагрузку, которая тоже не гарантирует надежную эксплуатацию. Однако, отсутствие готовности к эксплуатации может иметь место и в том случае, если электродвигатель является частью вентилятора, и на рабочем колесе наблюдаются срывы потока. Это указывает на неблагоприятный выбор размеров вентилятора или условий эксплуатации и может привести к трещинам на лопастях вентилятора. Здесь тоже может не подтверждаться готовность к эксплуатации.
Это краткое и приведенное в качестве примера перечисление показывает, что может пониматься под термином «готовность к эксплуатации».
Во избежание неопределенных вибрационных состояний во время измерения физических величин предлагается проводить измерение/измерения в системе, которая является в значительной степени стабильной. Поэтому в одной модификации способа предпочтительно перед генерированием упомянутого по меньшей мере одного измеренного значения проверяют, достигла ли частота вращения электродвигателя установленной ступени частоты вращения, или частота вращения еще движется в направлении установленной ступени частоты вращения. Это означает, что, например, при задании устанавливаемой ступени частоты вращения в 97 об/мин проверяют, равна ли частота вращения действительно 97 об/мин, или частота вращения электродвигателя в настоящий момент еще изменяется в направлении установленной ступени частоты вращения. Достижение установленной ступени частоты вращения обеспечивает, во-первых, что загруженные зависящие от частоты вращения параметрические данные тоже фактически могут быть использованы для надежной оценки измеренного значения. Во-вторых, в таком случае электродвигатель обычно больше не находится в промежуточном состоянии, в котором измеренные значения искажены вследствие неустановившихся процессов.
В одной модификации на этапе оценки упомянутого по меньшей мере одного измеренного значения проверяют, соблюдается ли заранее заданное краевое условие. Такого рода краевым условием может быть, например, предельное значение, выше которого надежная работа электродвигателя не может быть гарантирована. Если такого рода или подобное краевое условие не соблюдено, то может выдаваться предупредительное сообщение, и/или способ прерывается. При этом предупредительное сообщение может выдаваться самым различным образом. Возможно, например, что загорается светодиод (LED) и тем самым указывает на отказ. Так как, в частности, при первоначальном вводе в эксплуатацию электродвигатель мог бы быть соединен с программирующим устройством или с управляющим компьютером, то такого рода предупредительное сообщение может также подаваться на это программирующее устройство или, соответственно, на этот управляющий компьютер. В этом случае наладчик может непосредственно реагировать на это предупредительное сообщение.
В другой модификации способ дополнительно включает в себя этап оценки ресурса подшипника, причем при оценке ресурса подшипника загружаются несколько параметрических данных и/или измеряются несколько измеренных значений и комбинируются друг с другом. В частности, при первоначальном вводе в эксплуатацию этот оцененный ресурс подшипника может в таком случае сохраняться в блоке памяти, например, в блоке памяти параметров в качестве контрольного значения. При этом можно исходить из того, что электродвигатель во время всего ресурса подшипника работает при существующих в данный момент условиях эксплуатации. Эти условия эксплуатации могут включать в себя, например, рабочую температуру, вибрационную нагрузку и/или положение установки электродвигателя. Дополнительно при оценке ресурса подшипника может учитываться увеличивающийся износ компонентов электродвигателя. Так, электродвигатель с увеличивающимся износом подшипника генерирует больше вибраций, чем совершенно новый электродвигатель. Возрастающая вибрационная нагрузка в свою очередь ведет к снижению ресурса подшипника. Это тоже может учитываться при оценке ресурса подшипника, так как поведение при возрастающем износе может быть оценено сравнительно хорошо.
В другой модификации этап генерирования по меньшей мере одного измеренного значения, этап загрузки по меньшей мере одной параметрической информации и этап оценки упомянутого по меньшей мере одного измеренного значения осуществляются для каждой из нескольких ступеней частоты вращения. Таким образом может быть сгенерирована полная картина готовности к эксплуатации электродвигателя. При этом последовательность не обязательно должна соблюдаться для всех этапов и всех измеренных значений. Так, можно сначала определить все измеренные значения для всех ступеней частоты вращения и лишь затем проводить оценку измеренных значений. Так как отдельные измеренные значения, как, например, вибрационная нагрузка может быть, однако, релевантна и для установки следующей ступени частоты вращения, то отдельные или все измеренные значения могут оцениваться непосредственно после их определения.
На этапе генерирования упомянутого по меньшей мере одного измеренного значения ускорение и/или скорость вибрации электродвигателя может измеряться с помощью датчика вибрации электродвигателя, и отсюда генерируется значение вибрации. Устройства, с помощью которых возможно такого рода измерение вибрации, раскрыты, например, в DE 10 2018 211 838 A1 и в DE 10 2018 211 833 A1, к содержанию которых здесь делается конкретная отсылка.
При генерировании значения вибрации может производиться измерение вибраций также и при частоте вращения, равной нулю, что соответствует останову электродвигателя. Это означает, что ротор относительно статора и вокруг оси ротора не движется или в любом случае движется несущественно. Вследствие этого сам электродвигатель не может производить вибраций, которые могут измеряться датчиком вибраций электродвигателя. Однако, таким образом можно проверить, вводятся ли и в какой мере вибрации установочной среды электродвигателя к электродвигателю. Нередко эти введенные вибрации установочной среды являются настолько значительными, что дополнительные вибрации электродвигателя во время его работы создают слишком высокую вибрационную нагрузку на электродвигатель. Благодаря оценке вибраций при частоте вращения, равной нулю, такая ненадежная работа электродвигателя может быть распознана уже перед приемом в эксплуатацию.
Независимо от выбранной ступени частоты вращения на этапе загрузки упомянутой по меньшей мере одной параметрической информации максимально допустимая вибрация может быть загружена в качестве параметрической информации, соответствующей значению вибрации. Максимально допустимая вибрация в таком случае на этапе оценки измеренного значения могла бы сравниваться со сгенерированным значением вибрации. Таким образом может быть установлено, имеют ли место при заданной частоте вращения такого рода большие вибрации электродвигателя, что надежная работа электродвигателя не будет обеспечиваться. В этом случае не может идти речь о готовности к эксплуатации электродвигателя, так как работа электродвигателя могла бы привести к преждевременному повреждению электродвигателя или приводимой этим электродвигателем нагрузки.
Дополнительно или альтернативно на этапе загрузки упомянутой по меньшей мере одной параметрической информации значение вибрации, которые было сгенерировано во время калибровочного измерения электродвигателя, например, во время его заключительной проверки, может загружаться для текущего значения частоты вращения. Это означает, что параметрические данные содержат значения вибрации из калибровочного измерения - в дальнейшем называются также калибровочными значениями - при различных частотах вращения, и что загружается калибровочное значение, которое соответствует текущей частоте вращения электродвигателя, и сравнивается с актуально измеренным значением вибрации. При этом калибровочное значение и актуально измеренное значение вибрации должны отличаться друг от друга лишь несущественно. Если это отклонение превышает заданную степень, то можно сделать вывод о наличии повреждения.
В одном усовершенствовании этого варианта выполнения вибрации установочной среды могут учитываться при сравнении калибровочного значения с актуально измеренным значением вибрации. При этом первое значение вибрации определялось бы во время останова электродвигателя, а второе значение вибрации - при отличной от нуля частоте вращения. При этом первое значение вибрации представляет вибрации установочной среды. Второе значение вибрации касается вибраций, которые возникают при наложении вибраций установочной среды и вибраций электродвигателя. Тогда при оценке второго значения вибрации первое значение вибрации может вычитаться из второго значения вибрации и сравниваться с калибровочным значением. Если разность первого и второго значений вибрации больше, чем в заданной степени, отклоняется от калибровочного значения, то можно сделать выводы о наличии повреждения. Такого рода повреждение может возникнуть, например, из-за ненадлежащей транспортировки или - если электродвигатель является частью вентилятора - из-за деформации лопасти вентилятора.
В следующем варианте осуществления этого этапа генерирования упомянутого по меньшей мере одного измеренного значения, который может применяться дополнительно или альтернативно, может определяться пространственная ориентация электродвигателя. Один способ такого рода раскрыт, например, в заявке DE 10 2018 211 843 A1, к содержанию которой настоящим делается конкретная отсылка.
Параметрическая информация, соответствующая этим измеренным значениям, может включать в себя допустимый диапазон пространственной ориентации электродвигателя. Такого рода допустимый диапазон в таком случае загружался бы на этапе загрузки упомянутого по меньшей мере одной параметрической информации и использовался бы во время этапа оценки измеренного значения для проверки положения установки электродвигателя. При этом можно проверить, находится ли эта пространственная ориентация электродвигателя внутри допустимого диапазона. допустимый диапазон при этом может включать в себя отдельные дискретные ориентации. Так, например, параметрическая информация может указывать, что допустимо лишь горизонтальное положение установки. Поскольку было бы сложно соблюсти требование абсолютно горизонтального положения установки, предлагается также и при дискретных пространственных ориентациях указывать диапазон ориентации. Так, например, мог бы допускаться угловой диапазон ± 2°, если требуется горизонтальное положение установки (монтажа).
Предлагаемый изобретением электродвигатель, который предпочтительно предназначен для осуществления предлагаемого изобретением способа, имеет блок памяти параметров и интерфейс для передачи параметрических данных. Блок памяти параметров предназначен для сохранения параметрических данных. Интерфейс соединен с блоком памяти параметров таким образом, что параметрические данные, передаваемые через интерфейс, могут сохраняться в блоке памяти параметров. Для этого, например, может быть предусмотрен микропроцессор, который управляет связью через интерфейс и получаемые через интерфейс параметрические данные откладывает в блок памяти параметров. При этом блок памяти параметров может быть выполнен как выделенный блок памяти, который сохраняет лишь параметрические данные. Поскольку обычно внутри блока электроники двигателя должны сохраняться и другие данные, блок памяти параметров может быть также частичной областью большего блока памяти. При этом блок памяти параметров может быть образован энергонезависимым блоком памяти. Так как параметрические данные обычно жестко привязываются к электродвигателю, и поэтому параметрические данные в течение ресурса электродвигателя не могут меняться, блок памяти параметров в принципе может быть выполнен даже как неизменяемый блок памяти. Предпочтительно, однако, содержание энергонезависимого блока памяти может меняться. Лишь в качестве примера, однако, не ограничиваясь этим, делается ссылка на применение флэш-память, EEPROM (Electronically Erasable Programmable Read-Only Memory), NVRAM (Non-Volatile Random Access Memory) или другие полупроводниковые запоминающие устройства.
Система, в которую передаются параметрические данные электродвигателя и могут там сохраняться, раскрыта, например, в заявке DE 10 2018 211 846 A1, к содержанию которой настоящим тоже делается конкретная отсылка. Передаваемые там параметрические данные являются контрольными значениями, которые используются для оценки измеренных значений расположенного внутри двигателя датчика вибрации. Однако, эта система может также использоваться и для передачи других параметрических данных.
Параметрические данные, записанные в блоке памяти параметров, могут дополнительно быть записаны в базе данных, которая, например, может эксплуатироваться изготовителем электродвигателя. Это, в частности, возможно осуществлять просто в том случае, если параметрические данные передаются на электродвигатель во время заключительной проверки и/или калибровочного измерения. Файл в такого рода базе данных может представлять собой «цифровой двойник» электродвигателя, в котором содержатся вся существенная информация об электродвигателе и/или о его эксплуатационных свойствах. Такого рода система баз данных раскрыта, например, в DE 10 2018 201 707 A1, к содержанию которой настоящим делается конкретная отсылка.
Если используется такого рода база данных, то результаты предлагаемого изобретением способа оценки могут загружаться в базу данных. Так, например, возможно, что в «цифровой двойник» добавляется информация о вибрационном состоянии установочной среды, о положении установки электродвигателя, контрольное значение для ресурса подшипника или результаты оценки измеренных значений. Для этого может использоваться интерфейс электродвигателя. Эта дополнительная информация может передаваться в базу данных через многофункциональный интерфейс. Возможно также, что при использовании программирующего устройства или управляющего компьютера во время первоначального ввода в эксплуатацию дополнительная информация сначала собирается в программирующем устройстве или управляющем компьютере, а затем передается в базу данных. Для этого в свою очередь может использоваться глобальная вычислительная сеть, или это может быть память большой емкости, как, например, USB-карта. В последнем случае записанная в памяти большой емкости информация на следующем этапе могла бы импортироваться в базу данных.
Параметрические данные в принципе могут содержать самую разную информацию, которая описывает электродвигатель и (длительно) соединенную с электродвигателем нагрузку. В качестве примера следует указать на центр тяжести электродвигателя или частей электродвигателя, и/или массу электродвигателя или частей электродвигателя, и/или регулировочные усилия подшипника, и/или характеристики подшипника, и/или на максимально допустимый дисбаланс электродвигателя, и/или геометрические данные электродвигателя, и/или допустимый диапазон пространственной ориентации электродвигателя, и/или на максимально допустимую частоту вращения электродвигателя, и/или характеристику магнитного притяжения между статором и ротором электродвигателя.
«Регулировочные усилия подшипника» при этом обозначают осевые усилия, действующие на подшипник. Под действием этих сил может гарантироваться, что тела качения подшипника, чаще всего шарики фактически катятся между внутренним и наружным кольцами подшипника, а не проскальзывают между этими кольцами. Благодаря перекатыванию тел качения трение при работе подшипника остается небольшим. Однако, если регулировочные усилия подшипника слишком велики, то износ подшипника возрастает, что в свою очередь сокращает ресурс подшипника. Тем самым, такого рода параметрическая информация способствует оценке ресурса подшипника.
«Характеристики подшипника» могут включать в себя, например, размеры подшипника (диаметр наружного кольца, диаметр тел качения, внутренний диаметр внутреннего кольца, ширину подшипника и т.д.), зазор подшипника, допускаемую нагрузку подшипника и/или другие расчетные коэффициенты подшипника. Однако, сюда могут также подпадать и особенности опоры, например, имеет ли этот подшипник предохранительное кольцо или грязезащитное кольцо, или какая смазка используется в подшипнике. Такого рода характеристики большей частью можно получить из технического паспорта подшипника. Однако, характеристики подшипника могут также содержать дату изготовления подшипника, что, в частности, имеет значение для оценки ресурса смазочного средства.
Предлагаемый изобретением электродвигатель может быть компонентом вентилятора, причем для этого рабочее колесо соединено с ротором электродвигателя. Чаще всего при этом рабочее колесо и электродвигатель соединяются уже во время изготовления, так что совершенно точно известно, как ведет себя вентилятор. В частности, тем самым известно также, какая нагрузка - рабочее колесо - приводится посредством электродвигателя и каковы ее свойства. В этом случае параметрические данные могут дополнительно включать в себя максимально допустимый дисбаланс вентилятора и/или геометрические данные рабочего колеса, и/или информацию о варианте выполнения этого рабочего колеса, и/или кривую зависимости осевого смещения от частоты вращения и/или другую информацию о рабочем колесе.
При этом «осевым смещением» называется сила, действующая на лопасть вентилятора, которая возникает из-за движения воздуха через лопасть. Таким образом, осевое смещение связано с давлением воздуха, которое действует на лопасть. При этом осевое смещение является зависящей от частоты вращения величиной. Чем больше это осевое смещение, тем сильнее нагружаются подшипники в продольном направлении вала. Это в свою очередь сказывается на ресурсе подшипника.
Имеются разные возможности для реализации и усовершенствования идеи данного изобретения благоприятным образом. В связи с этим следует сослаться, с одной стороны, на пункты формулы, зависимые от независимых пунктов, а с другой стороны, на последующее разъяснение предпочтительного примера выполнения данного изобретения с привлечением чертежей. В сочетании с разъяснением предпочтительного примера выполнения изобретения со ссылкой на чертежи поясняются также в общем предпочтительные варианты выполнения и модификации данной идеи. На чертежах показано следующее.
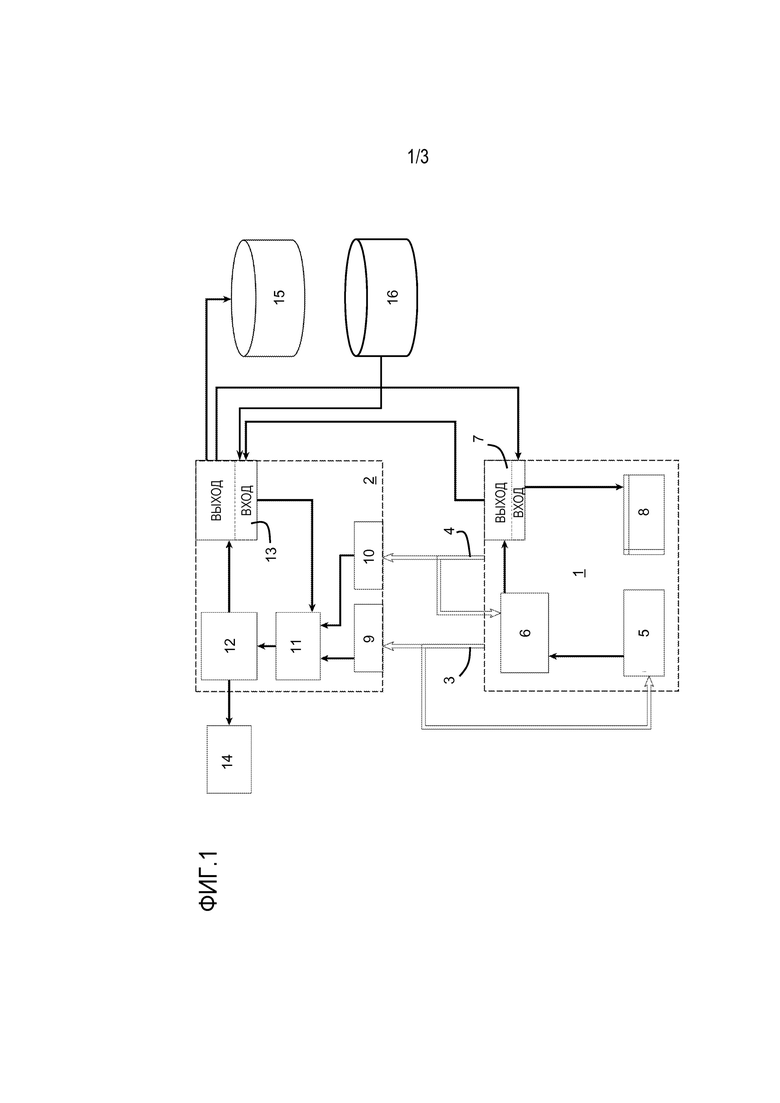
Фиг. 1 блок-схема с системой из электродвигателя и испытательной установки, с помощью которой параметрические данные могут передаваться в блок памяти параметров,
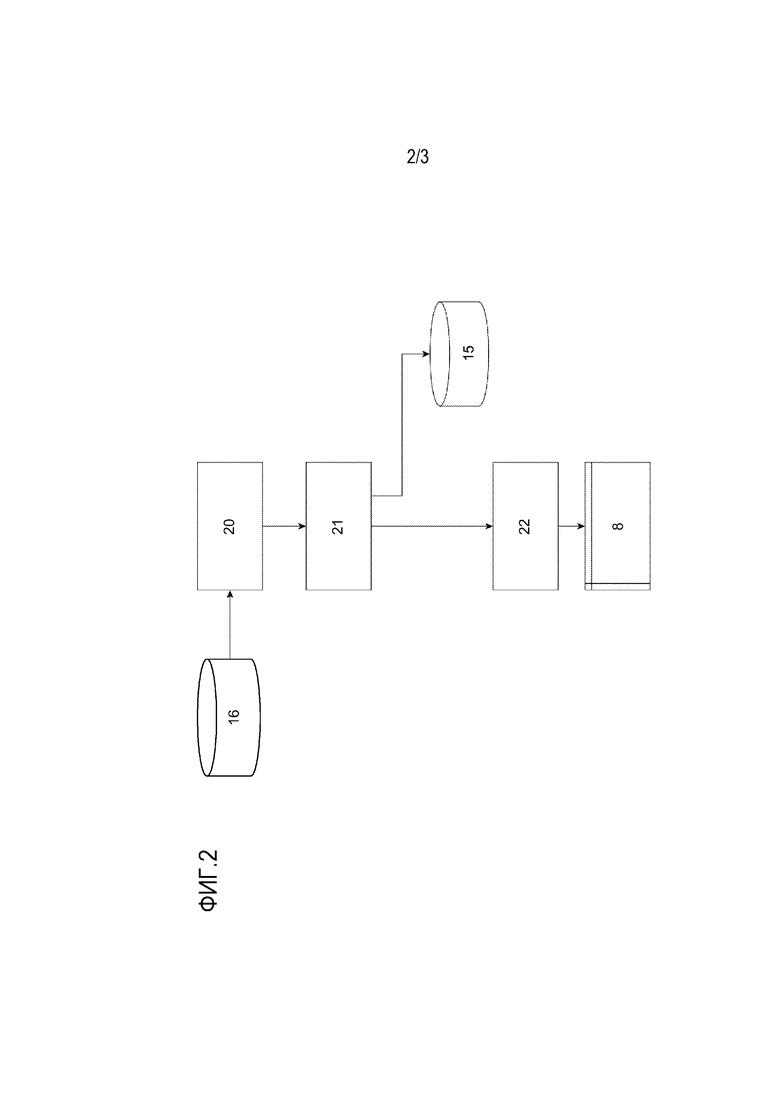
Фиг. 2 логическая схема сохранения параметрических данных в блоке памяти параметров, и
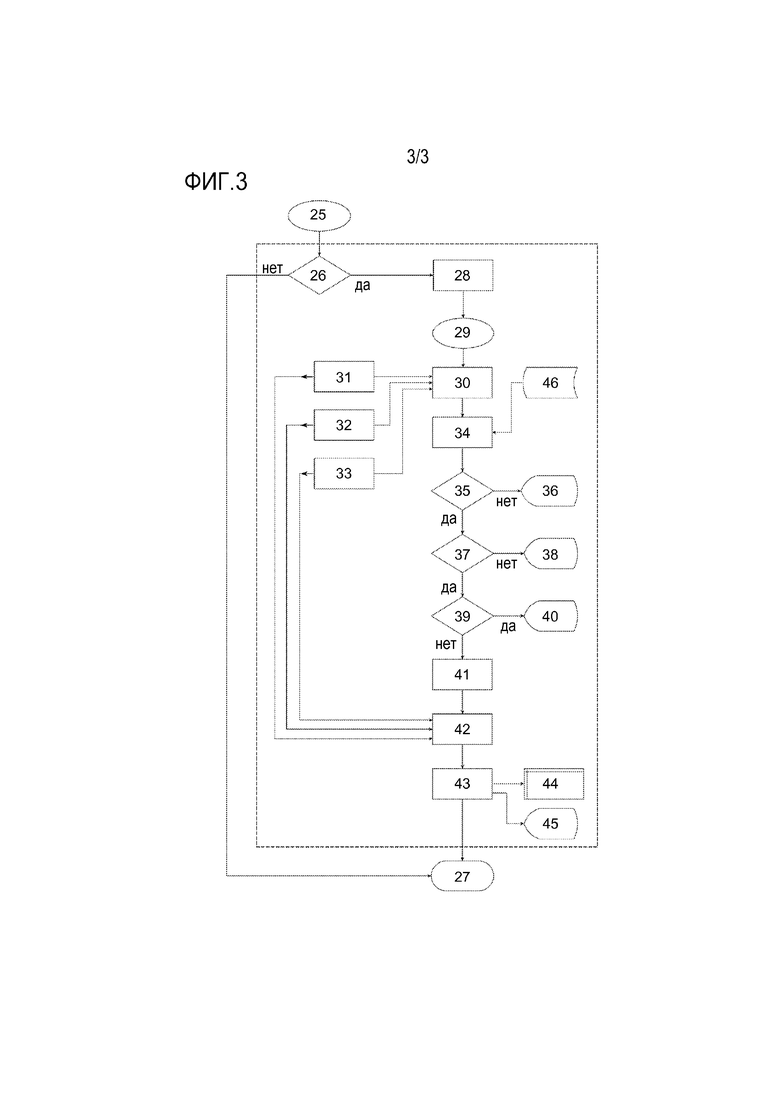
Фиг. 3 логическая схема одного примера выполнения предлагаемого изобретением способа.
На Фиг. 1 показана блок-схема с системой из электродвигателя 1 и установки 2 окончательной проверки, причем на Фиг. 1 обозначены соответственно наиболее релевантные здесь компоненты. Электродвигатель соединяется с установкой окончательной проверки, чтобы осуществить проверку электродвигателя перед его отправкой. При этом, во-первых, могут калибрироваться датчики электродвигателя, во-вторых, параметрические данные передаются в блок памяти параметров.
Электродвигатель 1 является компонентом вентилятора и при работе генерирует вибрации, что представлено стрелкой 3, и частоту вращения, что представлено стрелкой 4. Вибрации 3 измеряются по меньшей мере в одном направлении посредством (внутреннего) датчика 5 вибраций электродвигателя. Датчик 5 вибраций является примером датчика, который может применяться в предлагаемом изобретением способе. Получаемые с помощью датчика 5 вибраций измеренные значения передаются на процессор 6, который образован, например, посредством микроконтроллера. Этот процессор 6 может осуществлять, например, аналого-цифровое преобразование и/или регулировать определение измеренных значений. Таким образом, процессор 6 по измеренным значениям может определять значения вибрации. Кроме того, этот процессор 6 предназначен для определения актуальной частоты вращения.
Процессор 6 соединен с интерфейсом 7 и (внутренним) блоком памяти, который выполнен как энергонезависимый блок памяти и работает как блок 8 памяти параметров. Интерфейс 7 представляет собой коммуникационное соединение с испытательной установкой 2. Через выход OUT интерфейса 7 информация может отправляться на испытательную установку 2, через вход IN интерфейса 7 информация может получаться испытательной установкой 2, причем входной канал и выходной канал не обязательно должны быть реализованы отдельно друг от друга, но можно также использовать общую коммуникационную линию, например, с использованием шины.
Испытательная установка 2 содержит по меньшей мере один тестовый датчик 9, датчик 10 частоты вращения, блок 11 регистрации данных, процессор 12 и интерфейс 13. Испытательная установка среди прочего предназначена для проведения калибровки датчика 5 вибрации с использованием упомянутого по меньшей мере одного тестового датчика 9. Указанный по меньшей мере один тестовый датчик 9 предназначен для того, чтобы измерять вибрации 3 электродвигателя 1. Для этого упомянутый по меньшей мере один тестовый датчик 9 вибротехнически связан с электродвигателем. Датчик 10 частоты вращения измеряет актуальную частоту вращения 4 электродвигателя 1. Как и тестовый датчик (тестовые датчики) 9, так и датчик 10 частоты вращения передают полученные измеренные значения на блок 11 регистрации данных, который в свою очередь может передавать информацию на процессор 12. Процессор 12 соединен с блоком 14 вывода данных, посредством которого может осуществляться, например, индикация балансировки, или могут выдаваться результаты заключительной проверки. Процессор к тому же соединен с интерфейсом 13, который, как и интерфейс 7 имеет вход IN и выход OUT. Вход IN интерфейса 13 коммуницирует с выходом OUT интерфейса 7, тогда как выход OUT интерфейса 13 коммуницирует с входом IN интерфейса 7. Дополнительно вход IN интерфейса 13 соединен с блоком 11 регистрации данных, а выход OUT интерфейса 13 соединен с базой 15 данных, которая представляет собой базу данных двигателя для сохранения рабочих параметров электродвигателя 1. Одновременно вход IN интерфейса 13 соединен с базой 16 данных PPS (Produkt-Planung und Steuerung – планирования и управления продукцией), которая сохраняет информацию о конструкции и свойствах электродвигателя 1.
На Фиг. 2 показана логическая схема, которая в качестве примера показывает сохранение параметрических данных в блоке 8 памяти параметров. На этапе 20 из базы 16 данных PPS загружаются внутренние характеристики системы вентилятора или, соответственно, его двигателя, или, соответственно, его конструктивных элементов. Эти параметрические данные могут включать в себя:
• центры тяжести и массы (например, ротор, крыльчатка вентилятора, втулка статора)
• регулировочные усилия подшипника
• кривая зависимости осевого смещения от частоты вращения (вызываемой крыльчаткой вентилятора)
• магнитное притяжение между статором и ротором (радиальная сила)
• характеристические данные подшипника и его смазки, при необходимости, включая дату изготовления подшипника
• максимально допустимый дисбаланс и/или фактический остаточный дисбаланс по результатам заключительной проверки
• особенности опоры, например, грязезащитное кольцо и т.д., оказывающие влияние на оценку ресурса подшипника
• геометрические данные электродвигателя или, соответственно, вентилятора
• допустимое или, соответственно, стандартное положение установки
• пары значений максимально допустимая частота вращения/значение вибрации или, соответственно, характеристическая линия допустимая частота вращения/значение вибрации.
Эти или подобные параметрические данные могут получаться из разных источников базы 16 данных PPS. Так, было бы можно получать отдельную информацию из файлов данных CAD (Computer Aided Design). Другая информация может быть получена из технической конструкции или из измерений на конструктивно идентичном электродвигателе. Дополнительно параметрические данные могут быть получены путем калибровочных измерений и точно так же загружаться или собираться на этапе 20.
На этапе 21 параметрические данные, которые были загружены или, соответственно, собраны на этапе 20, передаются для параметризации на интерфейс 13. Оттуда он передаются в базу 15 данных и на интерфейс 7 электродвигателя 1. База 15 данных может сохранять «цифровой двойник» электродвигателя, причем там эти параметрические данные могут быть записаны как компонент этого «цифрового двойника». На этапе 22 параметрические данные, которые были переданы на интерфейс 7, принимаются электродвигателем и сохраняются в блоке 8 памяти параметров.
На Фиг. 3 показана логическая схема одного примера выполнения предлагаемого изобретением способа, который использует эти параметрические данные. На этапе 25 на электродвигатель 1 подается питающее напряжение, так что блок электроники двигателя снабжается энергией и запускается. На этапе 26 проверяют, приводиться ли электродвигатель в первый раз в эксплуатацию после заключительной проверки. Если ответ на этот вопрос отрицательный, то переходят к этапу 27, на котором проведение способа заканчивается. Если же на этот вопрос получается положительный ответ, то с этапа 28 начинается собственно способ оценки. Здесь начинается ввод в эксплуатацию. На этапе 29 начинается процесс разгона, при котором частота вращения электродвигателя за несколько ступеней частоты вращения от частоты вращения, равной нулю, повышается до номинальной частоты вращения.
На этапе 30 собираются измеренные значения датчиков электродвигателя, которые измеряются на этапах 31, 32 и 33. На этапе 31 с помощью блока измерения наклона определяется пространственная ориентация электродвигателя или, соответственно, его вала. На этапе 32 с помощью датчика вибрации измеряются вибрации электродвигателя и определяются значения вибраций. На этапе 33 определяется частота вращения электродвигателя. В частности, этапы 32 и 33 могут осуществляться для всех ступеней частоты вращения, хотя на логической схеме - из соображений наглядности - показан лишь один проход. Измерение положения установки - в большинстве сценариев применения - может осуществляться лишь один раз, так как положение установки не может изменяться.
На этапе 34 к полученным измеренным значениям из блока памяти параметров загружаются соответствующие параметрические данные. Этими параметрическими данными в данном случае являются допустимый диапазон пространственной ориентации электродвигателя, максимально допустимый дисбаланс электродвигателя, максимально допустимая вибрация и значения вибрации из заключительной проверки электродвигателя. Это символизируется полем 46, которое представляет собой параметрические данные, сохраненные в блоке 8 памяти параметров.
На этапе 35 пространственная ориентация электродвигателя, измеренная с помощью блока измерения наклона, сравнивается с параметрической информацией «допустимый диапазон пространственной ориентации» и, тем самым, оценивается измеренное значение пространственной ориентации электродвигателя. Если измеренная пространственная ориентация лежит вне допустимого диапазона, то на этапе 36 выдается предупредительное сообщение, согласно которому это положение установки лежит вне допустимого диапазона. После этого способ может быть прерван. Если измеренная пространственная ориентация лежит внутри этого допустимого диапазона, то переходят к этапу 37.
На этапе 37 пары значений, состоящие из частоты вращения и относящегося к ней значения вибрации, сравниваются с пределами допусков, причем эти пределы допусков заданы предварительно загруженными параметрическими данными. Если значение вибрации лежит вне пределов допусков, то на этапе 38 осуществляется соответствующая редакция на это. При этом, во-первых, выдается предупредительное сообщение о том, что значение вибрации больше, чем максимально допустимые вибрация. Во-вторых, может происходить снижение частоты вращения, с которой должны снижаться вибрации. Если вибрации существенно снижаются при относительно небольшом изменении частоты вращения, то можно сделать вывод о наличии точки резонанса. В этом случае способ в принципе может продолжаться. Если снижение частоты вращения не дает заметного снижения вибраций, то способ может быть полностью прерван. Соответствующее может произойти, если значение вибрации лежит существенно выше максимально допустимого значения вибрации.
На этапе 39 актуально измеренное значение вибрации сравнивается с теми значениями вибрации, которые были реализованы во время заключительной проверки электродвигателя. Если актуально измеренные значения вибрации лежат значительно выше значений вибрации из заключительной проверки, то очень вероятно, что имеет место повреждение или некорректное встраивание электродвигателя. При оценке актуально измеренных значений вибрации при этом учитываются вибрации установочной среды. Для этого вибрации определяются при частоте вращения электродвигателя, равной нулю, и вычитаются из значений вибрации при частоте вращения, не равной нулю. Благодаря этому можно избежать ошибочного решения вследствие вибраций от установочной среды. Если значения вибрации из калибровочного измерения существенно превышены, то на этапе 40 может быть указано, что очень вероятно наличие повреждения при транспортировке или дефекта при сборке. Также и в этом случае выполнение дальнейших этапов способа может прерываться, так что можно предотвратить последующие повреждения электродвигателя или, соответственно, вентилятора.
На этапе 41 тогда достигается номинальная частота вращения электродвигателя, и процесс разгона завершен. После этого на этапе 42 можно рассчитать фактически действующие на подшипник силы. Для этого определенная на этапе 31 пространственная ориентация, которая использует определенные на этапе 32 значения вибрации и определенную на этапе 33 частоту вращения. Дополнительно из блока памяти параметров загружаются другие параметрические данные, которые могут включать в себя, например, регулировочные усилия подшипника, геометрическую информацию об электродвигателе, геометрическую информацию о рабочем колесе, кривую зависимости осевого смещения от частоты вращения и информацию о массах частей электродвигателя.
Тогда по вычисленным таким образом фактически действующим силам на этапе 43 оценивается ресурс подшипника в качестве контрольного значения. Он может быть обозначен как номинальный ресурс L10h подшипника. Он определен в стандарте ISO 281 и указывает ресурс, который достигается у 90% подшипников, испытываемых при одинаковых условиях эксплуатации. Таким образом, этот номинальный ресурс L10h означает 10%-ную вероятность выхода из строя.
На этапе 44 это контрольное значение ресурса подшипника, а также данные, которые были получены во время проведения данного способа, сохраняются во внутреннем блоке памяти блока электроники двигателя. Далее, на этапе 45 указывается, что был достигнут номинальный режим. Тогда способ заканчивается на этапе 27, который представляет собой номинальный режим электродвигателя.
Дополнительно полученные во время осуществления способа измеренные значения и/или результаты оценки могут передаваться в базу 15 данных. Так, например, контрольное значение номинального ресурса L10h и измеренные значения для вибраций установочной среды могут передаваться в база данных и дополнять «цифровой двойник». Дополнительно или альтернативно возможно также, что информация, полученная, например, в среде индустрии 4.0, отправляется на блок мониторинга, причем блок мониторинга контролирует режим работы электродвигателя.
В отношении других предпочтительных вариантов выполнения предлагаемого изобретением способа - во избежание повторов - здесь делается отсылка к общей части описания, а также к последующей формуле изобретения.
И, наконец, следует четко указать на то, что вышеописанный пример выполнения служит лишь для разъяснения заявляемой идеи, однако, она не ограничивается этим примером выполнения.
Перечень ссылочных обозначений
1 электродвигатель
2 установка окончательной проверки
3 вибрации
4 частота вращения
5 датчик вибраций
6 процессор
7 интерфейс
8 блок памяти параметров
9 тестовый датчик
10 датчик частоты вращения
11 блок регистрации данных
12 процессор
13 интерфейс
14 блок вывода данных
15 база данных
16 база данных PPS
Группа изобретений относится к области диагностики и управления электродвигателями. Технический результат заключается в повышении надёжности электродвигателей. Группа изобретений содержит способ оценки готовности к эксплуатации электродвигателя, включающий следующие этапы: инициирование процесса разгона электродвигателя, причем частота вращения во время процесса разгона изменяется по нескольким ступеням частоты вращения; генерирование по меньшей мере одного измеренного значения путем соответствующего измерения физической величины с помощью датчика электродвигателя при по меньшей мере одной из ступеней частоты вращения; загрузку по меньшей мере одной параметрической информации из блока памяти параметров электродвигателя и оценку упомянутого по меньшей мере одного измеренного значения для по меньшей мере одной из ступеней частоты вращения с применением загруженной по меньшей мере одной параметрической информации, а также электродвигатель с блоком памяти параметров и с интерфейсом параметризации, а также вентилятор с таким электродвигателем и с рабочим колесом. 3 н. и 15 з.п. ф-лы, 3 ил.
1. Способ оценки готовности к эксплуатации электродвигателя, в частности электродвигателя вентилятора предпочтительно во время первоначального ввода в эксплуатацию, включающий в себя следующие этапы:
инициирования процесса разгона электродвигателя, причем частоту вращения во время процесса разгона изменяют по нескольким ступеням частоты вращения,
генерирования по меньшей мере одного измеренного значения путем соответствующего измерения физической величины с помощью датчика электродвигателя на по меньшей мере одной из ступеней частоты вращения,
загрузки по меньшей мере одной параметрической информации из блока памяти параметров электродвигателя, причем упомянутая по меньшей мере одна параметрическая информация соответствует сгенерированному по меньшей мере одному измеренному значению, и
оценки упомянутого по меньшей мере одного измеренного значения для по меньшей мере одной из ступеней частоты вращения с применением загруженной по меньшей мере одной параметрической информации.
2. Способ по п. 1, отличающийся тем, что процесс разгона начинается на нижней частоте вращения и нарастает по ступеням частоты вращения вплоть до верхней частоты вращения, причем нижняя частота вращения предпочтительно соответствует частоте вращения, равной нулю, - останову электродвигателя, а верхняя частота вращения предпочтительно представляет собой номинальную частоту вращения электродвигателя.
3. Способ по п. 1 или 2, отличающийся тем, что перед этапом генерирования упомянутого по меньшей мере одного измеренного значения проверяют, достигла ли частота вращения электродвигателя установленной ступени частоты вращения.
4. Способ по любому из пп. 1-3, отличающийся тем, что на этапе оценки упомянутого по меньшей мере одного измеренного значения проверяют соблюдение краевого условия, и при несоблюдении краевого условия выдают предупредительное сообщение, и/или способ прерывают.
5. Способ по любому из пп. 1-4, отличающийся тем, что дополнительно оценивают ресурс подшипника, причем при оценке ресурса подшипника загружают несколько параметрических данных и/или измеряют несколько измеренных значений.
6. Способ по любому из пп. 1-5, отличающийся тем, что параметрические данные включают в себя контрольные значения, и/или конструктивную информацию об электродвигателе, и/или конструктивную информацию о приводимой электродвигателем нагрузке, и/или характеристики электродвигателя, и/или характеристики компонентов, и/или информацию о эксплуатационных свойствах электродвигателя.
7. Способ по любому из пп. 1-6, отличающийся тем, что этапы генерирования по меньшей мере одного измеренного значения, загрузки по меньшей мере одной параметрической информации и оценки упомянутого по меньшей мере одного измеренного значения осуществляют для каждой из ступеней частоты вращения.
8. Способ по любому из пп. 1-7, отличающийся тем, что на этапе генерирования упомянутого по меньшей мере одного измеренного значения с помощью датчика вибрации электродвигателя измеряют ускорение и/или скорость вибрации электродвигателя и генерируют значение вибрации.
9. Способ по п. 8, отличающийся тем, что генерирование значения вибрации осуществляют при частоте вращения, равной нулю, - при останове электродвигателя, чтобы определить вибрации установочной среды электродвигателя.
10. Способ по п. 8 или 9, отличающийся тем, что на этапе загрузки упомянутой по меньшей мере одной параметрической информации загружают максимально допустимую вибрацию и на этапе оценки измеренного значения сравнивают со сгенерированным значением вибрации.
11. Способ по любому из пп. 8-10, отличающийся тем, что на этапе загрузки упомянутой по меньшей мере одной параметрической информации загружают сгенерированное во время калибровочного измерения электродвигателя значение вибрации для актуальной частоты вращения и на этапе оценки измеренного значения сравнивают со сгенерированным значением вибрации.
12. Способ по любому из пп. 8-11, отличающийся тем, что первое значение вибрации определяют во время останова электродвигателя, а второе значение вибрации определяют при отличной от нуля частоте вращения, и при отклонении второго значения вибрации за вычетом первого значения вибрации на заранее заданную степень от сгенерированного во время калибровочного измерения электродвигателя значения вибрации для частоты вращения, отличной от нуля, делают вывод о наличии повреждения.
13. Способ по любому из пп. 1-12, отличающийся тем, что на этапе генерирования упомянутого по меньшей мере одного измеренного значения измеряют пространственную ориентацию электродвигателя.
14. Способ по п. 13, отличающийся тем, что на этапе загрузки упомянутой по меньшей мере одной параметрической информации загружают допустимый диапазон пространственной ориентации электродвигателя, и на этапе оценки измеренного значения проверяют, лежит ли пространственная ориентация в допустимом диапазоне.
15. Электродвигатель, предпочтительно предназначенный для осуществления способа по любому из пп. 1-14, содержащий блок памяти параметров и интерфейс для передачи параметрических данных, причем блок памяти параметров выполнен для сохранения параметрических данных, переданных через интерфейс во время процесса параметризации.
16. Электродвигатель по п. 15, отличающийся тем, что параметрические данные включают в себя центр тяжести электродвигателя или частей электродвигателя, и/или массу электродвигателя или частей электродвигателя, и/или регулировочные усилия подшипника, и/или характеристики подшипника, и/или максимально допустимый дисбаланс электродвигателя, и/или геометрические данные электродвигателя, и/или допустимый диапазон пространственной ориентации электродвигателя, и/или максимально допустимую частоту вращения электродвигателя, и/или характеристику магнитного притяжения между статором и ротором электродвигателя.
17. Вентилятор с электродвигателем по п. 15 или 16 и рабочим колесом, причем рабочее колесо соединено с ротором электродвигателя.
18. Вентилятор по п. 17, отличающийся тем, что параметрические данные включают в себя максимально допустимый дисбаланс вентилятора, и/или геометрические данные рабочего колеса, и/или информацию о варианте выполнения рабочего колеса, и/или кривую зависимости осевого смещения от частоты вращения.
| СПОСОБ ПРЕДАВАРИЙНОЙ ДИАГНОСТИКИ ОБОРУДОВАНИЯ ЭЛЕКТРОВОЗА | 2008 |
|
RU2379205C1 |
| Способ эксплуатационного контроля технического состояния и прогнозирования ресурса подшипников электродвигателей | 2016 |
|
RU2622493C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОПРИВОДНОЙ АРМАТУРЫ | 2011 |
|
RU2456629C1 |
| СПОСОБ И КОМПЛЕКСНАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ АВИАЦИОННЫМИ СИСТЕМАМИ НАБЛЮДЕНИЯ И НАВИГАЦИИ | 2020 |
|
RU2799550C1 |
| FR 2999326 B1, 27.01.2017 | |||
| EP 2875234 A4, 13.07.2016. | |||

