Изобретение касается электродвигателя, имеющего статор и опертый с возможностью вращения относительно статора вокруг оси двигателя ротор. Изобретение касается также вентилятора, имеющего соответствующий электродвигатель. Кроме того, изобретение касается электроники двигателя для управления электродвигателя, причем эта электроника двигателя выполнена для управления обмоток статора и/или обмоток ротора электродвигателя.
Электродвигатели имеют статор и вращающийся относительно статора ротор. Очень часто, в частности у двигателей средних и высоких мощностей, ротор установлен с возможностью вращения посредством одного или нескольких подшипников. При установке таких электродвигателей во многих случаях пространственная ориентация, в которой позднее эксплуатируется электродвигатель, может выбираться относительно свободно. Это касается, в частности, вентиляторов, имеющих конструкцию с внешним ротором. Так, вал электродвигателя может быть ориентирован, например, горизонтально, вертикально вверх, вертикально вниз или в других любых угловых положениях.
Однако положение монтажа электродвигателя во время его эксплуатации сказывается на некоторых свойствах электродвигателя. Нагрузка подшипника вследствие сил веса и установки подшипника при различных положениях монтажа очень различна. При этом результатом различных положений монтажа является различный ресурс подшипника. Номинальный ресурс L10h подшипника определен в норме ISO 281 и указывает ресурс, который достигается 90% подшипников, проверенных в одинаковых условиях эксплуатации. При этом номинальный ресурс L10h подшипника соответствует 10-процентной вероятности выхода из строя. Вследствие высокой нагрузки в зависимости от положения монтажа двигатель, имеющий вал двигателя, направленный вертикально вниз, может в общем случае иметь меньший ресурс L10h подшипника, чем двигатель, у которого вал ориентирован горизонтально.
Положение монтажа сказывается также на возможной потере смазочного материала. Так, подшипниковой смазке при вертикальном положении монтажа легче выходить из подшипника, так что, в зависимости от положения монтажа, могут возникать различные сроки использования смазки.
Другой круг проблем, который возникает из-за различных положений монтажа, касается отвода тепла. Электродвигатель и возможно интегрированная в него электроника двигателя создают отходящее тепло, которое должно надлежащим образом отводиться. Это отходящее тепло обычно отдается окружающему воздуху через поверхности охлаждения или ребра охлаждения посредством конвекции. При этом, в зависимости от положения монтажа, поверхности охлаждения или, соответственно, ребра охлаждения могут работать не оптимально, и может происходить накапливание тепла. Это может приводить к повреждению чувствительных к температуре конструктивных частей и/или к потере мощности электродвигателя.
Далее, при различных положениях монтажа в двигатель или электронику двигателя может более или менее хорошо проникать влага, например, вследствие осадков. Когда, например, кабельные вводы направлены вверх, существует более вероятная опасность проникновения влаги, чем при ориентации кабельных вводов вниз. Также в последнем случае влага может стекать по соединительному кабелю и стекать каплями в неопасном месте.
Два последних названных круга проблем могут возникать и тогда, когда электроника двигателя выполнена в виде отдельного конструктивного узла. И в этом случае положение монтажа может быть решающим для того, насколько хорошо может отводиться тепло или насколько высок риск поступления влаги в электронику двигателя.
В большинстве случаев изготовителю электродвигателя не известно, в каком положении монтажа будет монтироваться и эксплуатироваться электродвигатель у заказчика. При этом имеются многие неизвестные параметры, которые сказываются на ресурсе и эксплуатации электродвигателя. Можно было бы допускать только определенные положения монтажа электродвигателя, например, горизонтально ориентированный вал двигателя. Однако, в частности у электродвигателя вентилятора, это трудно реализуемо, так как зачастую положение монтажа электродвигателя не может выбираться свободно, а задано ситуацией монтажа. Другая возможность подготовки к самым различным положениям монтажа могла бы заключаться в расчете электродвигателя так, чтобы, независимо от положения монтажа, были выполнены установленные техническими условиями параметры. Однако при этом получался бы электродвигатель, который являлся бы дорогим и имеющим избыточные для многих положений монтажа размеры.
Поэтому в основе настоящего изобретения лежит задача, выполнить и усовершенствовать электродвигатель, вентилятор и электронику двигателя вышеназванного рода таким образом, чтобы при различных положениях монтажа электродвигателя или, соответственно, электроники двигателя была обеспечена по возможности максимально надежный режим эксплуатации.
В соответствии с изобретением вышестоящая задача решается с помощью признаков п.1 формулы изобретения. Соответственно этому электродвигатель, о котором идет речь, отличается блоком измерения наклона, имеющим по меньшей мере один датчик и одну электронику датчика, при этом упомянутый по меньшей мере один датчик расположен относительно статора в неизменном положении и ориентации, при этом электроника датчика управляет упомянутым по меньшей мере одним датчиком, и при этом упомянутый по меньшей мере один датчик выполнен для генерирования результатов измерений, которые позволяют делать заключения о пространственной ориентации датчика и вместе с тем заключения о пространственной ориентации электродвигателя.
В отношении вентилятора вышестоящая задача решается с помощью признаков п.18 формулы изобретения. Соответственно этому предлагаемый изобретением вентилятор включает в себя предлагаемый изобретением электродвигатель и крыльчатку.
В отношении электроники двигателя вышестоящая задача решается с помощью признаков п.19 формулы изобретения. Соответственно этому электроника двигателя, о которой идет речь, отличается блоком измерения наклона, имеющим по меньшей мере один датчик и одну электронику датчика, при этом упомянутый по меньшей мере один датчик расположен относительно статора в неизменном положении и ориентации, при этом электроника датчика управляет упомянутым по меньшей мере одним датчиком, и при этом упомянутый по меньшей мере один датчик выполнен для генерирования результатов измерений, которые позволяют делать заключения о пространственной ориентации датчика и вместе с тем заключения о пространственной ориентации электроники двигателя.
Предлагаемым изобретением образом сначала было обнаружено, что ограничение положения монтажа или «выбор избыточных размеров» электродвигателя или электроники двигателя для всех возможных положений монтажа не является необходимым, когда имеется информация о пространственной ориентации электродвигателя, и при этом можно надлежащим образом реагировать на положение монтажа. В соответствии с изобретением это может достигаться таким образом, что электродвигатель имеет блок измерения наклона, который может использоваться для определения пространственной ориентации электродвигателя. Для этого блок измерения наклона имеет по меньшей мере один датчик и одну электронику датчика, причем эта электроника датчика управляет упомянутым датчиком/упомянутыми датчики. Упомянутый по меньшей мере один датчиками встроен в электродвигатель или установлен на электродвигателе таким образом, что его положение и ориентация относительно статора не изменяется или, во всяком случае, изменяется несущественно. Когда применяются несколько датчиков, они также должны были бы находиться в постоянной пространственной взаимосвязи друг с другом. Таким образом, существует определенная зависимость между ориентацией упомянутого по меньшей мере одного датчика и ориентацией всего электродвигателя. Упомянутый по меньшей мере один датчик генерирует результаты измерений, которые позволяют делать заключения о пространственной ориентации упомянутого датчика/упомянутых датчиков. Из этих результатов измерений можно делать заключения о пространственной ориентации упомянутого датчика/упомянутых датчиков и о пространственной ориентации двигателя.
Соответствующее может достигаться, когда электроника двигателя оснащена блоком измерения наклона и эксплуатируется соответственно этому блоку измерения наклона электродвигателя. При этом исполнении может находиться положение монтажа электроники двигателя, так что можно реагировать на неоптимальный отвод тепла или возможное поступление влаги. Когда эта электроника двигателя установлена на электродвигателе, который не выполнен для измерения положения монтажа, может также определяться положение монтажа всего электродвигателя, благодаря чему возможно дооснащение этой функциональной возможностью путем замены электроники двигателя. Поэтому большинство последующих вариантов осуществления относятся соответственно к предлагаемой изобретением электронике двигателя, в связи с чем во избежание повторов ниже подробно остановимся только на варианте осуществления электродвигателя. Специалист легко разберется, какие аспекты могут переноситься соответственно на электронику двигателя.
Под термином «положение монтажа» в общем и целом понимается, в какой пространственной ориентации смонтирован электродвигатель в окружающей установке. Положение монтажа определено, в частности, направлением, в котором ориентирован вал электродвигателя. При этом во многих случаях положение монтажа электродвигателя может определяться уже достаточно точно. По этой информации можно делать заключения, например, о нагрузке на подшипники и о возможности потери смазочного средства. Тогда эта информация позволяет выполнять предварительный расчет ресурса подшипников, предварительный расчет срока использования смазки, расчет фактически действующих сил или адаптацию интервалов технического обслуживания. Дополнительно положение монтажа может определяться углом, на который повернут двигатель вокруг оси двигателя, причем эта ось двигателя является той осью, вкруг которой вращается ротор. Это дополнительное измерение положения монтажа может быть релевантным, например, для расчета вероятности проникновения влаги в двигатель или возможно неоптимального отвода тепла. Третьим измерением положения монтажа мог бы быть угол, на который повернут электродвигатель вокруг оси, перпендикулярной оси двигателя, или вокруг оси, параллельной вектору гравитации Земли. Однако так как это направление для большинства эксплуатационных параметров электродвигателя не имеет значения, в большинстве случаев применения можно обходиться без этого третьего измерения положения монтажа. При этом в целом пространственная ориентация, в которой смонтирован электродвигатель, определена одномерной, двухмерной или трехмерной величиной.
Электроника датчика может иметь тоже разную конструкцию. В простейшем случае электроника датчика может быть образована ограничением тока посредством добавочного сопротивления. У систем емкостного измерения электроника датчика могла бы также включать в себя колебательный контур, с помощью которого на датчик подается переменное напряжение. Как конкретно выглядит электроника датчика, будет зависеть от применяемого в каждом случае датчика. Если датчик имеет несколько отдельных датчиков или применяются несколько датчиков, электроника датчика может управлять все отдельные датчики или все датчики вместе. Но могут также применяться отдельные части электроники датчика индивидуально для одного из отдельных датчиков. Соответствующие электроники датчика известны из уровня техники.
Дополнительно к управлению датчика электроника датчика может также производить предварительную обработку сигналов датчика. Эта предварительная обработка могла бы заключаться в оцифровывании аналогового сигнала. В зависимости от применяемого датчика, возможно также, чтобы пространственная ориентация датчика не сможет считываться непосредственно в сигналах датчика. В одном из таких случаев электроника датчика могла бы аналитически обрабатывать сигналы датчика таким образом, чтобы могли выдаваться значения пространственной ориентации датчика. Этот короткий, примерный перечень показывает, насколько гибкой и различной может быть выполнена электроника датчика.
Определенная пространственная зависимость между датчиком и статором может быть выполнена так же различно. Так, датчик может быть расположен на плате, в то время как эта плата привернута к втулке статора (например, в выполненном там корпусе электроники). Так как статор неизменно соединен с втулкой статора, таким образом возникает определенная и неизменная пространственная зависимость между датчиком и статором, даже когда, в принципе, плата могла бы незначительно деформироваться вследствие колебаний. Под определенной пространственной зависимостью понималось бы также, если бы датчик был заделан в заливочную массу, которая может незначительно деформироваться. Потому что и в этом случае положение и пространственная ориентация датчика относительно статора остается практически неизменной, так как датчик обычно будет только определенным образом отклоняться и возвращаться в свое исходное положение. Но датчик может быть также частью сенсорной системы, которая расположена, например, в подшипниковой трубе. И здесь получается определенная пространственная зависимость между датчиком и статором. Соответствующие варианты осуществления относятся также к тому случаю, когда датчик интегрирован в электронику двигателя, которая прифланцована к корпусу двигателя. Так как корпус двигателя находится в определенной и неизменной пространственной зависимости от статора, а электроника двигателя неподвижно закреплена на корпусе двигателя, получается определенная пространственная зависимость между датчиком и статором.
Также упомянутый по меньшей мере один датчик может быть выполнен разным образом. Важно, чтобы создаваемые упомянутым по меньшей мере одним датчиком сигналы датчика могли применяться для выдачи заключений о пространственной ориентации датчика и вместе с тем заключений о пространственной ориентации электродвигателя. Однако это требование может выполняться самыми разными датчиками.
В одном из предпочтительных примеров осуществления упомянутого по меньшей мере одного датчика этот датчик выполнен в виде датчика наклона, который использует последствия воздействия поля гравитации Земли. Такой датчик наклона действует подобно цифровому ватерпасу и часто имеет конструкцию в виде MEMS (англ. Micro Electro Mechanical System, МЭМС, микроэлектромеханическая система). В зависимости от количества измеряемых осей, датчик наклона дает один или два результата измерений, которые указывают соответственно некоторый угол относительно вектора поля гравитации, при этом направления, к которым относятся эти углы, будут всегда располагаться перпендикулярно друг другу. Так как область измерения у 2-осевых датчиков наклона во многих случаях ограничена по сравнению с 1-осевыми датчиками наклона, вместо одного 2-осевого датчика наклона могут также применяться два 1-осевых датчика наклона, причем тогда эти два 1-осевых датчика наклона должны были бы быть расположены так, чтобы измерения производились в двух ориентированных перпендикулярно друг другу направлениях. Независимо от исполнения, полученные значения углов относительно поля гравитации могут использоваться для определения пространственной ориентации датчика, так как вектор поля гравитации всегда указывает к центру Земли.
В другом предпочтительном примере осуществления упомянутого по меньшей мере одного датчика этот датчик включает в себя 3-осевой датчик колебаний. Было обнаружено, что электродвигатель колеблется характерным образом в зависимости от положения монтажа. Это связано, в частности, с тем, что подшипники и другие части электродвигателя нагружаются силой веса, в зависимости от положения монтажа, различным образом и при этом различным образом колеблются. Когда эти колебания измеряются в трех перпендикулярных направлениях, отсюда может находиться положение монтажа электродвигателя. Для этого сигналы датчика отдельных осей должны соответственно анализироваться и сравниваться с опорными значениями. Эти опорные значения могут находиться путем калибровочных измерений во время пуска электродвигателя в эксплуатацию. Для этого электродвигатель эксплуатировался бы в различных, но известных пространственных ориентациях, и в каждом случае замерялись бы колебания. При этом может также регистрироваться зависимость частоты вращения. Альтернативно опорные значения могут также браться из измерений другого двигателя одинаковой конструкции. В каждом случае результаты измерений 3-осевого датчика колебаний допускают возможность нахождения ориентации 3-осевого датчика колебаний относительно опорного вектора. На практике этот опорный вектор чаще всего мог бы быть вектором поля гравитации.
Для упрощения взаимосвязи между ориентацией электродвигателя и ориентацией упомянутого по меньшей мере одного датчика рекомендуется соединять датчик с электродвигателем таким образом, чтобы ось измерения блока измерения наклона была расположена параллельно оси двигателя. Когда упомянутый по меньшей мере один датчик включает в себя, например, 2-осевой датчик наклона, то одна из осей измерения датчика могла бы быть параллельной оси двигателя.
Дополнительно или альтернативно дополнительная ось измерения блока измерения наклона может быть расположена по существу параллельно ил перпендикулярно референтной плоскости электродвигателя, причем эта референтная плоскость может быть образована различными плоскостями и предпочтительно проходит параллельно оси двигателя. Существенным для референтной плоскости является, что она имеет определенное положение относительно электродвигателя. Потому что благодаря этому может находиться положение и пространственная ориентация других элементов электродвигателя, таких как, например, кабельные вводы, или положение поверхностей охлаждения или ребер охлаждения. Предпочтительная референтная плоскость образована плоскостью подключения электродвигателя, причем эта плоскость подключения является той областью электродвигателя, к которой подключается кабель /подключаются кабели питания электродвигателя. Во многих случаях у этих подключений имеются кабельные вводы, оси которых соответственно параллельны друг другу. Тогда эта плоскость подключения была бы плоскостью, которая располагается перпендикулярно осям кабельных вводов.
Во многих случаях электродвигатели имеют электронику двигателя, которая создает напряжения питания для обмоток статора и/или ротора. Эта электроника двигателя может содержать, например, силовую часть преобразователя частоты и/или управляющую электронику. При этом электроника двигателя расположена в корпусе электроники электродвигателя, или на электродвигателе закреплен отдельный корпус. В том и другом случае электроника двигателя имеет определенное положение и пространственную ориентацию относительно электродвигателя. Это обстоятельство используется в одном из вариантов осуществления для того, чтобы блок измерения наклона был интегрирован в электронику двигателя. Это может означать, что блок измерения наклона расположен на плате электроники двигателя. Этот вариант осуществления дает то преимущество, что уже имеется в распоряжении энергоснабжение для блока измерения наклона. Кроме того, возможно совместное применение частей электроники двигателя. Так, например, микропроцессор электроники двигателя может использоваться для выполнения расчетов, или память электроники двигателя для архивирования результатов измерений.
В другом варианте осуществления блок измерения наклона расположен в подшипниковой трубе, причем эта подшипниковая труба охватывает по меньшей мере части вала электродвигателя и выполнена на упомянутой по меньшей мере одной области помещения подшипника для подшипников вала. Такой вариант осуществления описан подробнее в DE 10 2018 211 833 A1, на которую настоящим делается непосредственная ссылка.
В одном из усовершенствований блок измерения наклона включает в себя блок аналитической обработки, который выполнен для того, чтобы из результатов измерений упомянутого по меньшей мере одного датчика определять информацию о пространственной ориентации упомянутого по меньшей мере одного датчика и/или электродвигателя. Блок аналитической обработки может быть при этом выполнен различным образом. Так, возможно, чтобы блок аналитической обработки использовал справочную таблицу, в которой созданы связи между результатами измерений и пространственной ориентацией. Эта справочная таблица может быть создана при калибровочном измерении электродвигателя. Однако во многих случаях положение монтажа не должно определяться с точностью в несколько градусов или меньше, так что возможные допуски монтажа блока измерения наклона относительно статора чаще всего имеют второстепенное значение. В этих случаях в распоряжение блока аналитической обработки может предоставляться справочная таблица конструктивно одинакового электродвигателя. Однако блок аналитической обработки может также выполнять расчеты на базе результатов измерений. В простейшем случае это может включать в себя интерполяцию или расчет полинома приближения. Однако могут также выполняться трудоемкие расчеты. Когда, например, блок измерения наклона включает в себя один или несколько датчиков колебания, то блок аналитической обработки может выполнять частотный анализ в виде FFT (англ. Fast Fourier Transform, БПФ, быстрое преобразование Фурье).
Определяемая блоком аналитической обработки информация о пространственной ориентации упомянутого по меньшей мере одного датчика и/или электродвигателя включает в себя предпочтительно набор данных, который указывает угол относительно опорного направления. Это опорное направление в простейшем случае образовано вектором силы гравитации. С его помощью можно, например, находить наклон оси двигателя относительно поля гравитации и поворот электродвигателя вокруг оси двигателя относительно референтной плоскости. Если надо получать и другую информацию о пространственной ориентации электродвигателя, то может быть необходимо второе опорное направление, которое образовано, например, магнитным полем Земли. Набор данных указывает, как электродвигатель отклоняется от этого опорного направления (или, соответственно, от опорных направлений). В зависимости от того, насколько точно должна указываться ориентация электродвигателя, набор данных может быть при этом одномерным, двухмерным или трехмерным.
В некоторых случаях может быть достаточным предоставление высказываний о пространственной ориентации электродвигателя в качественном отношении. Поэтому информация о пространственной ориентации упомянутого по меньшей мере одного датчика и/или электродвигателя дополнительно или альтернативно может включать в себя оценочный показатель. Этот оценочный показатель может указывать, насколько оптимальной или неоптимальной является текущая определенная пространственная ориентация. В простейшем случае оценочный показатель может принимать значение 0 и 1, при этом, например, 0 указывает, что электродвигатель находится в положении монтажа, которое не позволяет получить надежную эксплуатацию. Оценочный показатель может быть также натуральным числом, например, от 1 до 10, при этом 1 соответствует особенно неоптимальному, а 10 особенно оптимальному. Эта информация может также использоваться для того, чтобы обращать внимание пользователя на неоптимальное или даже недопустимое положение монтажа. Так, например, СИД (светоизлучающий диод) может указывать, что надежная эксплуатация невозможна. Таким образом, например, уже при первом пуске электродвигателя в эксплуатацию можно обнаруживать, когда из-за не соответствующего предписанию положения монтажа, например, угрожает проникновение воды в электродвигатель через отверстие для конденсата или кабельный ввод. Неоптимальное положение монтажа может также иметь место тогда, когда вследствие положения монтажа больше не может в достаточной мере гарантироваться отвод тепла.
Так как электродвигатели, как правило, бывают смонтированы в постоянной ориентации, блок измерения наклона может измерять пространственную ориентацию при первом пуске в эксплуатацию электродвигателя. Этот результат измерения может архивироваться в памяти и применяться для будущей эксплуатации. Но возможно также, чтобы пространственная ориентация регистрировалась многократно. Эта многократная регистрация может осуществляться при особых событиях или через периодические промежутки времени. Особое событие может включать в себя, например, повторное включение электродвигателя. Когда пространственная ориентация регистрируется периодически, то длина периода может зависеть от внешних факторов. Возможна была бы, например, ежедневная регистрация, когда не ожидаются никакие значительные изменения пространственной ориентации. Когда электродвигатель смонтирован в движущейся системе, например, в ветроэнергетической установке, то может быть уместна регистрация с гораздо более короткой длиной периода. Здесь могут быть даже целесообразны несколько регистраций в секунду.
Блок измерения наклона может иметь память, которая выполнена для сохранения результатов измерений упомянутого по меньшей мере одного датчика и/или для сохранения предварительно обработанных результатов измерений упомянутого по меньшей мере одного датчика. Эта память может быть выполнена различным образом. Однако во избежание потери данных при выходе из строя энергоснабжения память предпочтительно выполнена в виде энергонезависимой памяти. Такая энергонезависимая память может представлять собой, например, флэш-память, EEPROM (англ. Electronically Erasable Programmable Read-Only Memory, электрически стираемая программируемая память только для чтения), NVRAM (англ. Non-volatile Random Access Memory, энергонезависимая память произвольного доступа) или другую полупроводниковую память.
В одном из усовершенствований блок измерения наклона дополнительно может иметь интерфейс связи, через который могут передаваться текущий результат измерения, сохраненные в памяти блока измерения наклона результаты измерений и/или выведенная из результатов измерений информация. Этот интерфейс связи может иметь самую разную конструкцию. Могут применяться способы беспроводной передачи, например, на базе радио или оптические способы, так же, как и кабельные способы. Передача может осуществляться аналоговым или цифровым, последовательным или параллельным образом, пакетами или путем прямых соединений. Применяемая в каждом случае технология передачи будет зависеть от данного сценария применения. В качестве примера, но не ограничиваясь ими, можно сослаться на Bluetooth, Bluetooth LE (Low Energy), NFC (Near Field Communication), Ethernet, RS485, Modbus, Profibus, CAN-Bus или USB (Universal Serial Bus).
Интерфейс связи может быть выполнен таким образом, чтобы связь могла считываться, например, в случае сервиса, чтобы можно было лучше отслеживать причину выхода из строя.
Но интерфейс связи может быть также соединен, поддерживая связь, с электроникой двигателя. При этом электроника двигателя может быть выполнена для того, чтобы на базе принятых через интерфейс связи результатов измерений и/или выведенной информации производить адаптацию управления обмоток статора и/или ротора. Так, например, результат измерения может указывать, что имеет место очень неоптимальное положение монтажа, которое при долго продолжающейся эксплуатации приведет к повреждению двигателя. Это может объясняться, например, тем, что вследствие этого положения монтажа не может достаточно гарантироваться достаточный отвод тепла от чувствительных к температуре конструктивных частей. В этом случае электроника двигателя может управлять двигатель с более низкой мощностью или адаптировать цели регулирования, например, к очень спокойному ходу.
Дополнительно или альтернативно интерфейс связи может быть соединен, поддерживая связь, с сетью, которая обеспечивает возможность связи с блоком измерения наклона. Тогда эта сеть (или ее части) представляет собой предпочтительно сеть широкого охвата (глобальная вычислительная сеть), которая построена на базе кабеля или радио. Эта сеть может, например, объединять в сеть среду «Industrie 4.0» или, соответственно, окружение IoT (англ. Internet of Things, интернет вещей). При этом результаты измерений могут передаваться непосредственно, через агрегатор данных или через шлюз в блок мониторинга. Затем в блоке мониторинга полученные данные могут подвергаться дальнейшей аналитической обработке. Возможно было бы, чтобы интервалы технического обслуживания электродвигателя адаптировались к текущему положению монтажа, чтобы предотвращались возникающие повреждения. Так может предотвращаться разрушение подшипника, обусловленное повышенным вследствие положения монтажа риском потери смазки подшипника.
Электродвигатель может дополнительно иметь блок оценки, который выполнен для оценивания ресурса. Как уже указывалось, положение монтажа сказывается на ресурс отдельных компонентов электродвигателя. Эти ресурсы могут предварительно рассчитываться блоком оценки. Такой предварительно рассчитанным ресурсом может быть ресурс подшипника электродвигателя, какого-либо чувствительной к температуре конструктивной части электродвигателя и/или смазочного средства подшипника. В зависимости от положения монтажа, получаются различные нагрузки подшипника/подшипников. При этом относительно хорошо известно, как ведут себя подшипники при определенной нагрузке, и как при этом изменяется значение L10h, так что ресурс подшипника/подшипников может хорошо оцениваться и, например, при приближении к концу ресурса назначаться техническое обслуживание. На ресурс чувствительных к температуре конструктивных частей сказывается, в частности, когда неоптимальное положение монтажа мешает отводу тепла и из-за этого больше не может достаточно гарантироваться охлаждение конструктивных частей. Здесь, в частности, надо назвать полупроводниковые реле, которые применяются при создании переменных напряжений для обмоток статора/ротора. Повышенные температуры конструктивных частей снижают их ресурс, что тоже может оцениваться. Ресурс смазочного средства подшипника касается риска выхода смазочного средства из подшипника в зависимости от положения монтажа. Здесь может предварительно рассчитываться срок использования смазки и учитываться для адаптации интервалов технического обслуживания.
Электродвигатель может иметь различную конструкцию. Однако предпочтительно предлагаемая изобретением теория находит применение в связи с электродвигателями в диапазоне средних и больших мощностей (то есть примерно 100 Вт-15 кВт). При этом электродвигатель в одном из предпочтительных вариантов осуществления представляет собой EC-двигатель (англ. Electronically Commutated Motor, электронно-коммутируемый двигатель), который не имеет коммутатора, и у которого изменяющееся вращающееся поле запитывается в обмотки статора и/или ротора. В одном из особенно предпочтительных вариантов осуществления электродвигатель имеет конструкцию с внешним ротором, т.е. ротор расположен вокруг статора.
Предлагаемый изобретением электродвигатель является предпочтительно частью предлагаемого изобретением вентилятора. При этом вал электродвигателя соединен с рабочим колесом и приводит его в движение.
Итак, есть разные возможности предпочтительным образом выполнить и усовершенствовать идею настоящего изобретения. В связи с этим, с одной стороны, следует сослаться на пункты формулы изобретения, зависимые от п.1 формулы изобретения, а с другой стороны, на последующее пояснение предпочтительных примеров осуществления изобретения на основе чертежа. В связи с пояснением предпочтительных примеров осуществления изобретения на основе чертежа поясняются также вообще предпочтительные варианты осуществления и усовершенствования идеи изобретения. На чертеже показано:
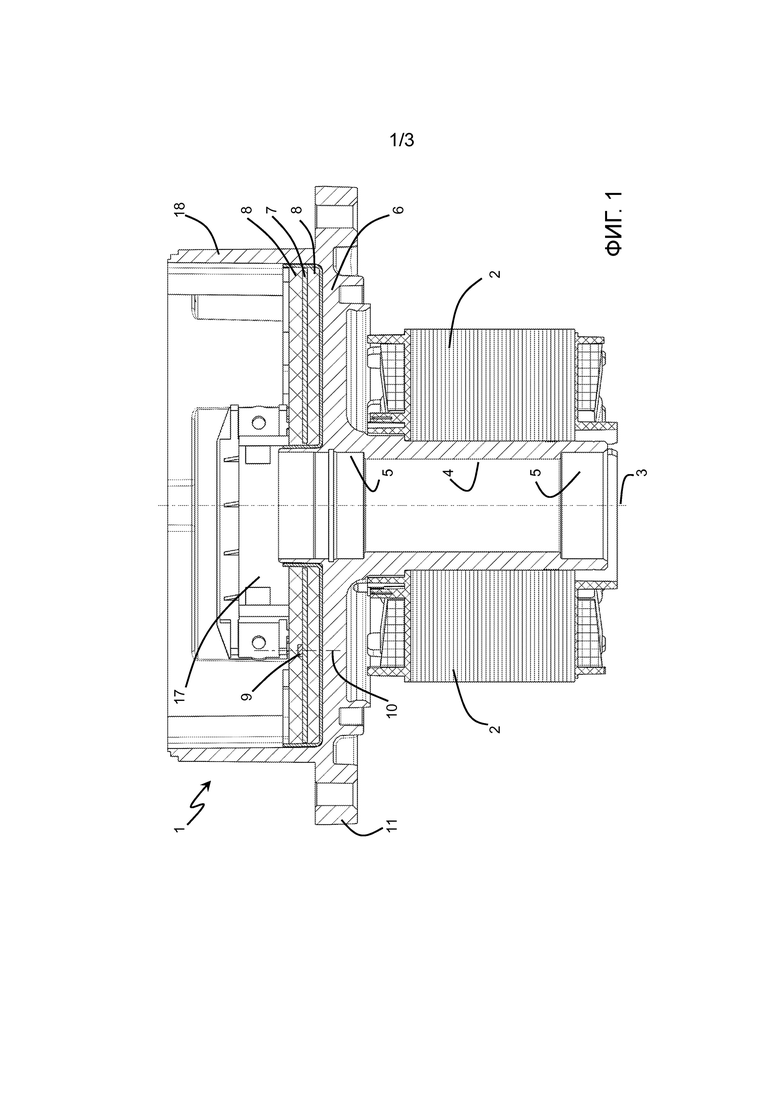
фиг.1: сечение статора предлагаемого изобретением электродвигателя, который имеет конструкцию с внешним ротором;
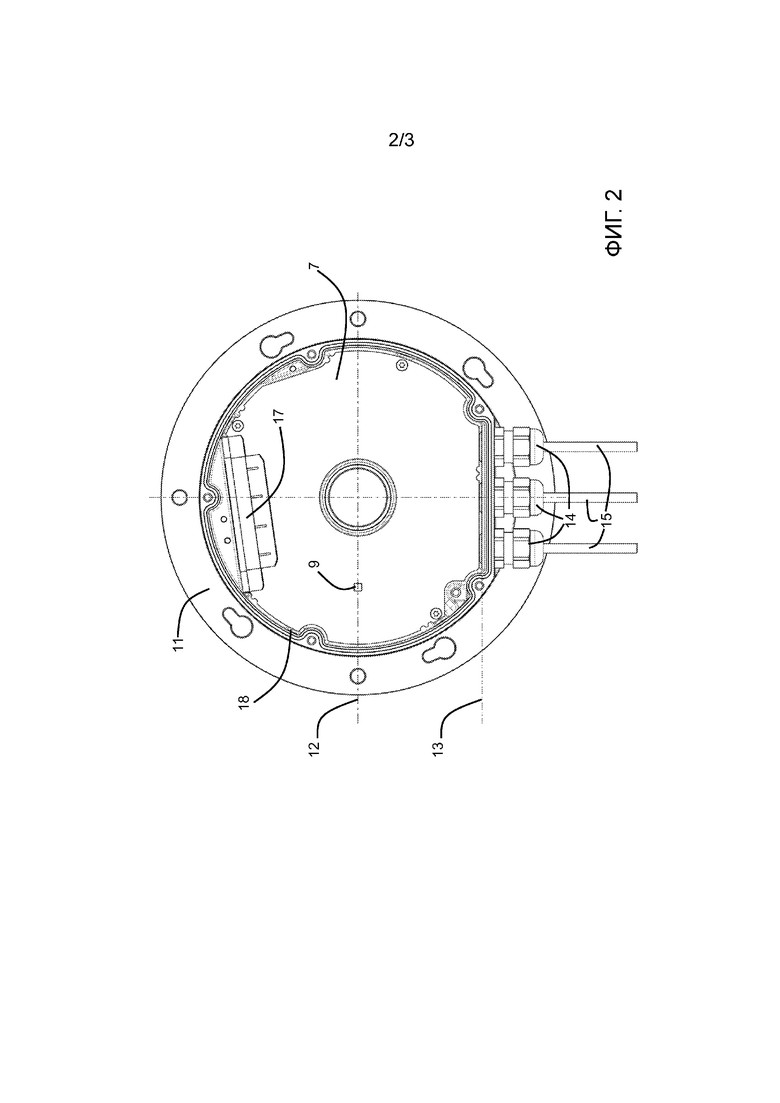
фиг.2: схематичный чертеж электроники двигателя предлагаемого изобретением электродвигателя, при этом ось датчика наклона расположена параллельно плоскости подключения;
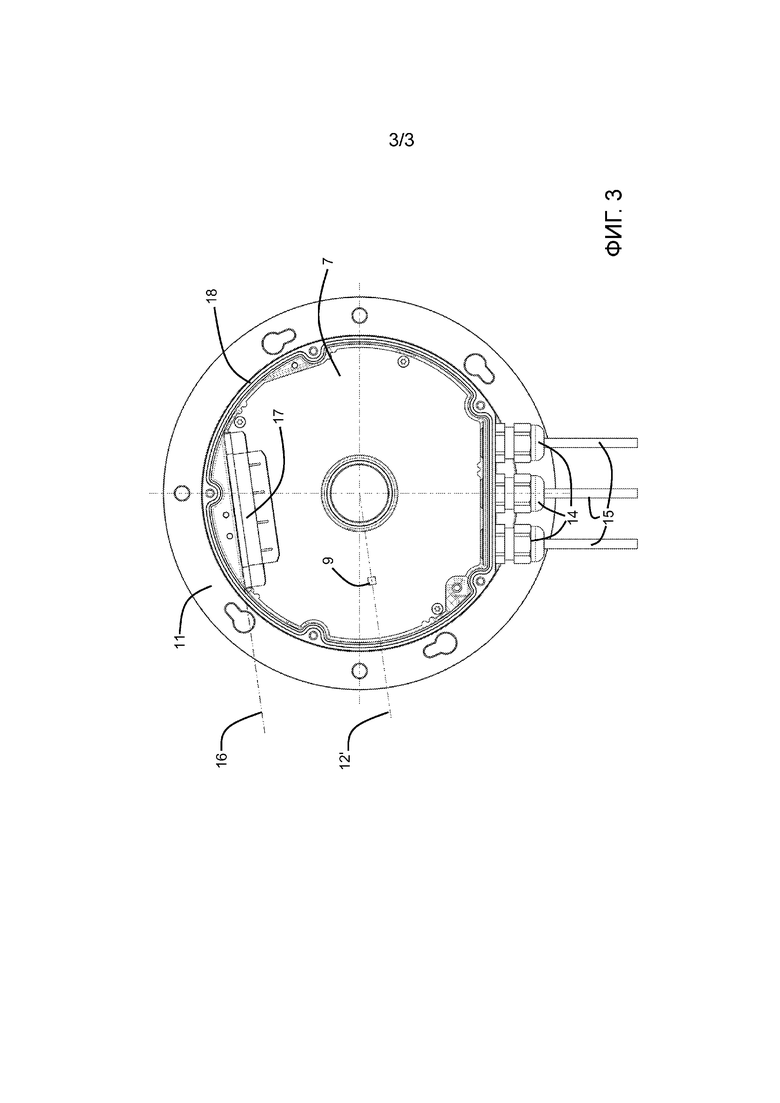
фиг.3: схематичный чертеж, аналогичный фиг.2, при этом ось датчика наклона расположена приблизительно параллельно плоскости присоединения силовых полупроводников.
На фиг.1 показано сечение предлагаемого изобретением электродвигателя 1, при этом в целях наглядности ротор электродвигателя не изображен. При этом электродвигатель имеет конструкцию с внешним ротором. Это означает, что статор 2 расположен на оси 3 двигателя, а ротор (на фиг.1 не изображен) вокруг статора 2. На оси 3 двигателя выполнена подшипниковая труба 4, на концах продольных сторон которой выполнено по области 5 помещения подшипника, при этом подшипниковая труба 4 и области 5 помещения подшипника выполнены во втулке статора. В областях 5 помещения подшипника помещены подшипники, через которые с возможностью вращения оперт также не изображенный вал электродвигателя. Втулка 6 статора образована алюминиевой конструктивной частью, на одном конце которой выполнена подшипниковая труба 4, а на другом конце которой - корпус 18 электроники для помещения электроники двигателя. Так как электродвигатель 1 представляет собой EC-двигатель, требуется электроника двигателя, которая генерирует и подает сигнал питания для обмоток статора и/или ротора. Эта электроника двигателя в изображенном на фиг.1 примере осуществления расположена в корпусе 18 электроники. У электроники двигателя на фиг.1 изображена плата 7, которая несет на себе конструктивные части электроники двигателя. Выше и ниже платы 7 расположена упругая заливочная масса 8, так что электроника двигателя виброизолирована относительно корпуса 18 электроники. Одновременно получается неизменное относительно статора 2 положение и ориентация платы 7, а также расположенных на ней конструктивных частей. На плате 7 расположен датчик 9 наклона, который является частью блока измерения наклона. При этом ось 10 измерения датчика наклона расположена параллельно оси 3 двигателя.
На фиг.2 показан вид в корпусе 18 электроники электродвигателя 1. При этом отчетливо различим край 11 фланца, который расположен вокруг корпуса 18 электроники. В корпусе 18 электроники расположена плата 7, которая несет на себе датчик 9 наклона. У датчика 9 наклона на чертеже показана дополнительная ось 12 измерения, которая образует вторую ось измерения датчика 9 наклона. Эта ось 12 измерения в этом примере осуществления расположена параллельно плоскости 13 подключения электродвигателя, которая в этом примере осуществления образует референтную плоскость. Причем плоскость 13 подключения образуется поверхностью втулки статора, на которой закреплены кабельные вводы 14. Кабельные вводы 14 обеспечивают возможность соединения с помощью соединительных кабелей 15 с электроникой двигателя на плате 7.
На фиг.3 показан очень похожий на фиг.2 пример осуществления, при этом референтная плоскость для ориентации дополнительной оси 12' измерения в этом примере осуществления образована плоскостью 16 присоединения для силовых полупроводников 17 электродвигателя. У электроники двигателя согласно примеру осуществления в соответствии с фиг.3 плоскость 16 присоединения повернута приблизительно на 8° относительно плоскости 13 подключения. Также плоскость 16 присоединения может образовывать референтную плоскость, параллельно которой может быть расположена ось 12' измерения датчика 9 наклона.
Ниже еще раз тезисно излагаются некоторые функции и предпочтительные усовершенствования предлагаемого изобретением электродвигателя.
1. определение ресурса критических конструктивных элементов в электронике путем регистрации пространственного положения источников тепла и приемников тепла/теплоотводов и вместе с тем конвекции/отвода тепла конструктивных частей, благодаря чему, например, возможна зависящая от положения адаптация мощности и достижимо продление ресурса критичных в отношении температуры конструктивных частей.
2. Предварительный расчет ресурса подшипника путем регистрации положения монтажа, отсюда различные нагрузки подшипника/нагрузки гнезда подшипника.
3. Предварительный расчет срока использования смазки путем регистрации положения монтажа, причем при перпендикулярном положении монтажа получается различный коэффициент в расчете срока использования смазки. Отсюда также определение и выдача интервалов технического обслуживания.
4. Распознавание ненадлежащего положения монтажа электродвигателя. При распознавании пространственного положения кабельного ввода и отверстий для конденсата может создаваться предупреждающее сообщение при пуске в эксплуатацию. При возникновении выхода из строя может отслеживаться проникновение воды в двигатель или электронику, и возможна более простая диагностика повреждений.
5. Регистрация положения монтажа и отсюда определение сил, фактически действующих на конструктивные части вентиляторов, для диагностики повреждений при отказе конструктивных частей или, соответственно, распознавание изменений положения двигателей/вентиляторов, которые совместно вращаются в установках, например, в ветроэнергетических установках.
В отношении других предпочтительных вариантов осуществления предлагаемого изобретением электродвигателя во избежание повторов ссылаемся на общую часть описания, а также на прилагаемые пункты формулы изобретения.
Наконец, следует отчетливо указать, что описанные выше примеры осуществления предлагаемого изобретением вентилятора и предлагаемого изобретением электродвигателя служат только для рассмотрения заявленной теории, однако не ограничивают ее этими примерами осуществления.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 Электродвигатель (ротор не изображен)
2 Статор
3 Ось двигателя
4 Подшипниковая труба
5 Область помещения подшипника
6 Втулка статора
7 Плата
8 Заливочная масса
9 Датчик наклона
10 Ось измерения датчика наклона
11 Фланцевый край
12, 12' Дополнительная ось измерения
13 Плоскость подключения
14 Кабельные вводы
15 Кабели подключения
16 Плоскость присоединения
17 Силовые полупроводники
18 Корпус электроники
Изобретение относится к электротехнике. Технический результат заключается в повышении надежности эксплуатации электродвигателя. Электродвигатель имеет статор и ротор, расположенный с возможностью вращения относительно статора вокруг оси двигателя. Электродвигатель содержит блок измерения наклона, имеющий по меньшей мере один датчик и одну электронику датчика. По меньшей мере один датчик расположен относительно статора в неизменном положении и ориентации. Электроника датчика управляет упомянутым по меньшей мере одним датчиком. По меньшей мере один датчик выполнен для генерирования результатов измерений, которые позволяют делать заключения о пространственной ориентации датчика и вместе с тем заключения о пространственной ориентации и положении монтажа электродвигателя. 3 н. и 12 з.п. ф-лы, 3 ил.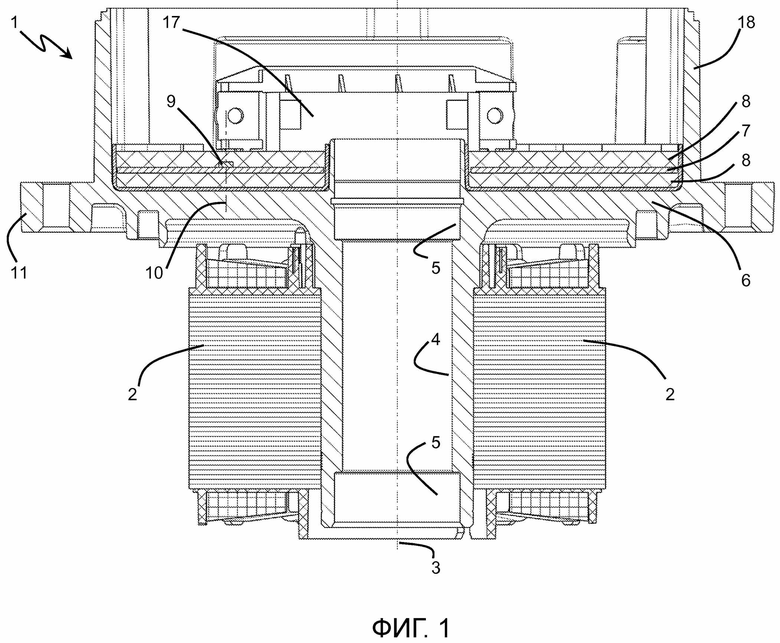
1. Электродвигатель, имеющий статор (2) и ротор, расположенный с возможностью вращения относительно статора (2) вокруг оси (3) двигателя, отличающийся тем, что электродвигатель содержит блок измерения наклона, имеющий по меньшей мере один датчик и одну электронику датчика, при этом упомянутый по меньшей мере один датчик расположен относительно статора (2) в неизменном положении и ориентации, при этом электроника датчика управляет упомянутым по меньшей мере одним датчиком, и при этом упомянутый по меньшей мере один датчик выполнен для генерирования результатов измерений, которые позволяют делать заключения о пространственной ориентации датчика и вместе с тем заключения о пространственной ориентации и положении монтажа электродвигателя.
2. Электродвигатель по п.1, отличающийся тем, что упомянутый по меньшей мере один датчик включает в себя датчик (9) наклона, который на базе поля гравитации Земли определяет ориентацию датчика (9) наклона относительно вектора поля гравитации и/или
упомянутый по меньшей мере один датчик включает в себя 3-осевой датчик колебаний, который измеряет колебания электродвигателя в трех направлениях, при этом полученные таким образом результаты измерений позволяют делать заключения об ориентации 3-осевого датчика колебаний относительно опорного вектора.
3. Электродвигатель по любому из пп. 1 или 2, отличающийся тем, что ось (10) измерения блока измерения наклона расположена параллельно оси (3) двигателя.
4. Электродвигатель по любому из пп. 1-3, отличающийся тем, что другая ось (12) измерения блока измерения наклона расположена по существу параллельно или перпендикулярно референтной плоскости электродвигателя, при этом референтная плоскость предпочтительно образована плоскостью (13) подключения электродвигателя (1) или плоскостью (16) присоединения силовых полупроводников (17).
5. Электродвигатель по любому из пп. 1-4, отличающийся тем, что блок измерения наклона интегрирован в электронику двигателя, при этом электроника двигателя выполнена для управления обмотками статора и/или ротора и расположена предпочтительно в корпусе электроники, и/или
блок измерения наклона расположен в подшипниковой трубе (4), которая охватывает по меньшей мере части вала электродвигателя и на которой выполнена по меньшей мере одна область (5) помещения подшипника для подшипников вала.
6. Электродвигатель по любому из пп. 1-5, отличающийся тем, что блок измерения наклона имеет блок аналитической обработки, причем блок аналитической обработки выполнен для того, чтобы из результатов измерений упомянутого по меньшей мере одного датчика определять информацию о пространственной ориентации упомянутого по меньшей мере одного датчика и/или электродвигателя, при этом информация может включать в себя набор данных, который указывает угол относительно опорного направления, и/или оценочный показатель, который указывает, насколько оптимальна или не оптимальна текущая определенная пространственная ориентация.
7. Электродвигатель по любому из пп. 1-6, отличающийся тем, что блок измерения наклона выполнен для того, чтобы при пуске электродвигателя в эксплуатацию при каждом включении электродвигателя и/или периодически определять пространственную ориентацию электродвигателя.
8. Электродвигатель по любому из пп. 1-7, отличающийся тем, что блок измерения наклона имеет память, которая выполнена для сохранения результатов измерений упомянутого по меньшей мере одного датчика и/или для сохранения предварительно обработанных результатов измерений упомянутого по меньшей мере одного датчика.
9. Электродвигатель по любому из пп. 1-8, отличающийся тем, что блок измерения наклона дополнительно имеет интерфейс связи, через который могут передаваться текущий результат измерения, результаты измерений, сохраненные в памяти блока измерения наклона, и/или информация, выведенная из результатов измерений.
10. Электродвигатель по п. 9, отличающийся тем, что интерфейс связи соединен, с осуществлением связи, с электроникой двигателя, при этом электроника двигателя выполнена для того, чтобы на базе результатов измерений, принятых через интерфейс связи, и/или выведенной информации производить адаптацию управления обмотками статора и/или ротора.
11. Электродвигатель по п. 9 или 10, отличающийся тем, что интерфейс связи, с осуществлением связи, соединен с сетью, предпочтительно глобальной вычислительной сетью.
12. Электродвигатель по любому из пп. 1-11, отличающийся тем, что электродвигатель содержит блок оценки, который выполнен для оценивания ресурса, предпочтительно ресурса подшипника электродвигателя, чувствительной к температуре конструктивной части электродвигателя и/или смазочного средства подшипника.
13. Электродвигатель по любому из пп. 1-12, отличающийся тем, что электродвигатель выполнен как EC-двигатель - электродвигатель с электронной коммутацией (Electronically Commutated Motor) - и/или имеет конструкцию с внешним ротором.
14. Вентилятор, имеющий электродвигатель по любому из пп. 1-13 и рабочее колесо, соединенное с валом двигателя.
15. Электроника двигателя для управления электродвигателем, в частности электродвигателем по любому из пп. 1-13, причем электроника двигателя выполнена для управления обмотками статора и/или обмотками ротора электродвигателя,
отличающаяся тем, что электроника двигателя содержит блок измерения наклона, имеющий по меньшей мере один датчик и одну электронику датчика, при этом упомянутый по меньшей мере один датчик расположен относительно электроники двигателя в неизменном положении и ориентации, при этом электроника датчика управляет упомянутым по меньшей мере одним датчиком, и при этом упомянутый по меньшей мере один датчик выполнен для генерирования результатов измерений, которые позволяют делать заключения о пространственной ориентации датчика и вместе с тем заключения о пространственной ориентации и положении монтажа электроники двигателя.
| DE 102016006727 A1, 08.12.2016 | |||
| КR 20160029999 А, 16.03.2016 | |||
| WO 2017115668 A1, 06.07.2017 | |||
| US 2017324304 A1, 09.11.2017 | |||
| DE 102005032720 A1, 25.01.2007 | |||
| CN 205407506 U, 27.07.2016 | |||
| US 2014378310 A1, 25.12.2014 | |||
| Способ получения заменителей кожи | 1958 |
|
SU118806A2 |

