Настоящее изобретение касается электродвигателей. В частности, настоящее изобретение касается способа и устройства для контроля состояния и прогнозируемой эксплуатации электродвигателей.
Электродвигатели широко используются в промышленном оборудовании и процессах, где такие двигатели применяются для перемещения товаров по сборочной линии от одного рабочего места к другому или в качестве источника энергии для используемых сборщиками инструментов с электрическим приводом. Примеры включают в себя воздушный компрессор, который обеспечивает сжатый воздух для механических отверток, распылителей краски и других небольших переносных приборов. Более мощные электрические двигатели поддерживают контроль за состоянием окружающей среды, охлаждая, нагревая и перенося воздух через систему нагрева и охлаждения в зданиях и транспортных средствах. В условиях домов и офисов электродвигатели используют в устройствах от компьютеров до пылесосов. Как известно в общем, такие приборы составляют главный источник шума и вибрации. Поэтому все возрастающее требование рынка относительно двигателей более тихих и без вибрации могут быть выполнены только с помощью конструкции и изготовления исправных и более бесшумных двигателей.
В условиях производства неожиданное повреждение двигателя является как нежелательным, так и дорогостоящим. В промышленной установке неисправность двигателей может иметь существенное финансовое воздействие, если линию сборки отключают в течение некоторого времени, необходимого для ремонта или замены двигателя. Кроме того, при некоторых производственных процессах, таких как, например, в оборудовании для изготовления полупроводников, неисправность критического двигателя может привести к повреждению изделия, если поставлено под угрозу управление в окружающей среде.
В соответствии с этим имеется возрастающая потребность в улучшении надежности электродвигателей вообще и особенно в промышленных применениях обнаружении приближающихся неисправностей, чтобы двигатели можно было отремонтировать или заменить во время текущего технического обслуживания, а не после того, как возникла неисправность. Также желательно повысить надежность электродвигателей посредством улучшенного контроля качества, осуществляемого во время изготовления электродвигателей. Кроме того, желательно обнаруживать неисправности электродвигателей до появления катастрофической неисправности посредством осуществления контроля во время работы.
Недавно были разработаны способы обнаружения и диагностики повреждений, в которых сравниваются выходные сигналы комплексных систем с выходным сигналом, полученным от математической модели системы без неисправностей. Сравнение этих сигналов определяют количественно на основе остатка, который является разностью между двумя сигналами. Для определения типа неисправности выполняется анализ остатков. Этот анализ включает в себя статистические способы сравнения остатков с базой данных остатка для систем с известными неисправностями.
До недавнего времени было трудно получить точные модели в реальном масштабе времени для многосвязных систем, то есть систем более чем с одним входным сигналом и/или одним выходным сигналом. Если модель системы не точна, остатки содержат ошибки моделирования, которые очень трудно отделять от действия фактических неисправностей.
Другой недостаток таких способов ОДП (обнаружения и диагностики повреждений) касается трудности создания базы данных для статистического исследования остатков с целью классифицирования неисправности. Разработка такой базы данных требует предварительной информации относительно всех возможных неисправностей и действия каждой такой неисправности на остатки. В соответствии с этим, требуется некоторый период времени для контролирования поврежденного и нормального оборудования и для разработки базы данных, которая содержит характерные признаки неисправностей для целей классификации неисправности. Этот процесс является и дорогостоящим, и длительным. Кроме того, база данных также должна удовлетворять определенным требованиям конкретной схемы ОДП.
Поскольку механические неисправности являются результатом вибрации, обнаружение и анализ вибрации представляют обычный элемент многих схем обнаружения из уровня техники. Такие способы требуют разработки библиотеки, показывающей образцы вибрации ранее испытанных электродвигателей, которые соотнесены с обнаруженной неисправностью.
Общим недостатком обнаружения механических повреждений является то, что схема требует предварительной информации относительно характерных признаков неисправностей для коррелирования фактической неисправности с обнаруженным характерным признаком. Такая корреляция требует разработки обширной базы данных и трудоемкого анализа и уровня экспертизы относительно двигателя.
Другой недостаток обнаружения механических повреждений появляется в результате трудности, связанной с воспроизведением измерений. Например, измерения вибраций с использованием акселерометра сильно зависят от способа крепления и расположения датчика, для гарантии повторяемости обнаружения характерного признака. Даже при надлежащем креплении и расположении датчика, обнаружение характерного признака может быть нарушено фоновой вибрацией и изменением эксплуатационных условий, таких как эксплуатационная скорость, входное напряжение и нагрузка электродвигателя. Следует понимать, что вероятность ошибочной индикации неисправности в системе, полагающейся на обнаружение механических повреждений, высока. Например, оценка состояния подшипников двигателя включает в себя анализ механической вибрации двигателя и выделение определенных частот, связанных исключительно с дефектами подшипников (и/или любой суммы и разности частот и связанных гармоник). К сожалению, наличие и возможное совпадение с другими колебаниями в спектре вибраций часто мешают обнаружению требуемого сигнала. Для получения желательной информации и успеха такой системы в обнаружении или предсказании неисправности необходимы дорогостоящие и сложные средства, что является весьма нежелательным.
В соответствии с этим желательно устранить осложнения, вызванные ошибками моделирования и как ложными показаниями, так и пропущенным показанием неисправностей электродвигателя. Кроме того, желательно избежать необходимости разрабатывать обширную базу данных и трудоемкости разработанной экспертизы при анализе причины неисправностей в электродвигателях. Помимо этого желательно устранить необходимость в дорогостоящих и сложных средствах для получения и обработки информации, которая может указывать на наличие неисправности.
Краткое изложение сущности изобретения
Настоящее изобретение касается основанной на модели системы обнаружения неисправности и способа контроля и предсказания требований по техническому обслуживанию электродвигателей и, в частности, электродвигателей мощностью менее 1 лошадиной силы. При использовании системы можно получить информацию для ранней диагностики приближающейся механической неисправности электродвигателя в условиях эксплуатации при неизвестных условиях нагрузки. Поскольку соответствующие настоящему изобретению способ и система основаны на программном обеспечении и используют данные, полученные от не влияющих на режим работы измерений, затраты на внедрение существенно ниже, чем в существующих способах технического обслуживания.
Система содержит средство компьютера, подсоединенное к датчикам напряжения, тока и скорости средством многофункционального сбора данных. Датчики обеспечивают непрерывную информацию в реальном масштабе времени входных напряжения и тока и сигнала выходного напряжения, вырабатываемого тахометром двигателя. Средство компьютера использует такую информацию при непрерывно выполняемом алгоритме обнаружения и диагностики повреждений вместе с диагностическим наблюдателем.
В системе и способе используется экспериментальный алгоритм моделирования с большим числом переменных для получения модели электродвигателя посредством определения структуры, которая является порядком дифференциальных уравнений, математически описывающих двигатель, и инвариантов двигателя, то есть таких параметров, как индуктивность, сопротивление электродвигателя, момент инерции, нефизические параметры, такие как матрицы А, В и С уравнений состояния, описывающих двигатель, и другие выбранные параметры. В предпочтительном варианте осуществления изобретения модель электродвигателя разрабатывают, когда известно, что двигатель функционирует без неисправностей, обычно после первоначальной установки двигателя. Позже, во время работы, рассчитывается сигнал выходного напряжения модели, основываясь на фактических входных напряжении и токе, поступающих в двигатель, и непрерывно сравнивается с полученным в результате измерений сигналом выходного напряжения двигателя. Алгоритм квантует сравнение на основании остатка, который образуется при вычитании соответствующих сигналов.
Диагностический наблюдатель анализирует остаток и определяет, является ли двигатель исправным или работает иначе, чем без неисправностей. При исправной работе остаток идеально равен нулю, хотя при работе выбранное допустимое пороговое значение можно выбрать таким образом, чтобы компенсировать ошибки моделирования и шум или другие возмущения, которые могут приводить к ненулевому остатку.
Когда составляющая электродвигателя ухудшается так, что двигатель работает вне предназначенного рабочего диапазона, или когда действительно возникает неисправность, остаток имеет ненулевое значение, которое превышает допустимое пороговое значение. Когда средство компьютера обнаруживает ненулевой остаток, приближается неисправность и выдается предупреждение так, чтобы можно было предпринять соответствующие меры для доведения до минимума влияния, которое в противном случае было бы вызвано нефункциональным двигателем. При обнаружении приближающейся неисправности диагностический наблюдатель оценивает полученные в результате измерений переменные двигателя, определяет отклонение от опорного значения и разрабатывает диагностику вероятного неисправного или отказавшего компонента.
В другом варианте осуществления настоящего изобретения раскрыта система для обнаружения и диагностирования механических неисправностей электродвигателей мощностью менее 1 лошадиной силы. Вместо того чтобы разрабатывать обширную базу данных для установления корреляции неисправности с полученными в результате измерений сигналами, настоящий вариант осуществления изобретения включает математическую модель двигателя без неисправностей и измерения рабочих параметров двигателя при испытании, которые являются нечувствительными к искажениям, связанным с окружающей средой, рабочими условиями и монтажом.
Этот вариант осуществления изобретения особенно полезен при изготовлении электродвигателей мощностью менее 1 лошадиной силы и особенно при выполнении контрольного испытания качества. После изготовления множества двигателей для разработки базовой модели используется алгоритм идентификации многосвязной системы с использованием всей доступной совокупности двигателей. Следует понимать, что совокупность может содержать ряд неисправных двигателей, так что может возникнуть необходимость в совершенствовании модели, выбирая допустимое пороговое значение и повторно испытывая каждый двигатель относительно модели. Те двигатели, которые выходят за пределы порога, изымаются из совокупности, а остающиеся двигатели используют для разработки исправленной базовой модели. Исправленная базовая модель хранится в средстве компьютера для контрольного испытания качества всех изготавливаемых впоследствии двигателей.
Если во время контрольного испытания качества параметры, такие как индуктивность, сопротивление электродвигателя, коэффициент трения или момент инерции двигателя, выходят за пределы порогового допуска, установленного в базовой модели двигателя, двигатель при испытании классифицируется как имеющий неисправность. Сравнивая параметры испытываемого двигателя с базовой моделью двигателя с различными допустимыми пределами, можно дополнительно классифицировать неисправность электродвигателя и отображать диагностическую информацию.
Краткое описание чертежей
Фиг. 1 является схематическим представлением электродвигателя, полезного в осуществлении предпочтительного варианта осуществления настоящего изобретения.
Фиг. 2 представляет вид сверху обычного кожуха электродвигателя.
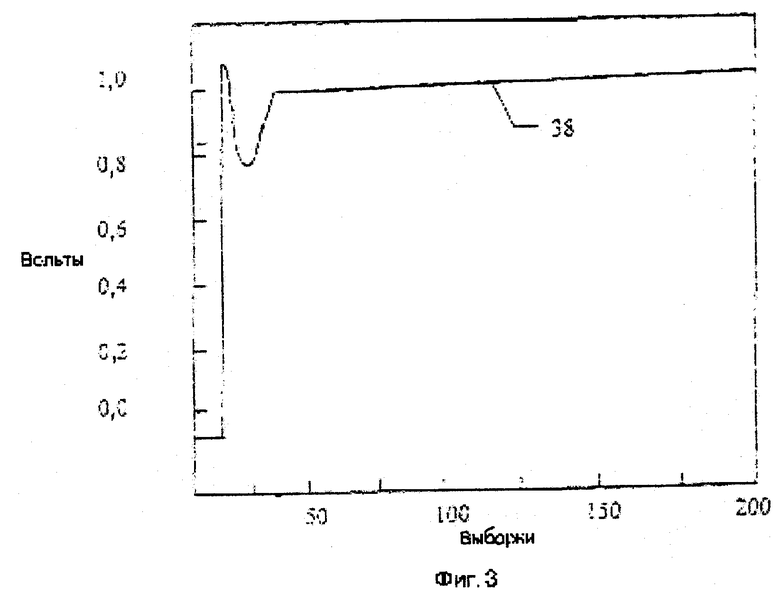
Фиг. 3 и 4 иллюстрируют обычные формы входного и выходного сигналов для выполнения одного варианта осуществления настоящего изобретения.
Фиг. 5 является схематическим представлением соответствующей предпочтительному варианту осуществления настоящего изобретения конфигурации уровня системы.
Фиг. 6 иллюстрирует блок-схему системы обнаружения и диагностики повреждений в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 7А-7В и 8А-8F иллюстрируют схемы последовательности операций системы обнаружения и диагностики повреждений согласно изобретению в соответствии с вариантами осуществления настоящего изобретения.
Подробное описание изобретения
Рассмотрим более подробно чертежи с помощью ссылочных позиций. На фиг. 1 изображена система, содержащая электрический двигатель 10 такой, как электродвигатель мощностью менее 1 лошадиной силы. С целью иллюстрации двигатель 10 включает в себя обмотки 12 ротора, статор 14 и вал 16, опирающийся около обоих концов на подшипники 18. Шкив 20 соединяет вал 16 с нагрузкой (не показанной). Коллектор 22 проводит ток в ротор 12 и якорь 24 или из них, при этом якорь совместно со статором создает магнитное поле, приводящее к вращению вала двигателя. Специалистам в данной области техники понятно, что двигатель 10 может иметь ротор без коллектора и без обмоток. Двигатель 10 смонтирован в корпусе 26, который изолирует его от пыли, влаги и других загрязняющих веществ. Фиг. 2 представляет собой вид сверху кожуха электродвигателя и, в частности, корпуса 26, где основание корпуса закреплено на крышке с помощью винтов и гаек 28 известным в технике способом.
Обращаясь теперь к фиг. 5, отметим, что на ней показан предпочтительный вариант осуществления соответствующей настоящему изобретению системы 30 контроля состояния электродвигателя. Система 30 включает в себя двигатель 10, источник электроэнергии 32, который может быть либо источником сетевого напряжения, либо блоком электропитания типа Hewlett Packard 6010А, множество датчиков 34, 35 и 36, многофункциональную плату 37 и компьютер 42. Когда подается напряжение, двигатель 10 осуществляет линейный переход к своей эксплуатационной скорости (числу оборотов вала), обычно в пределах 25 миллисекунд подачи энергии, от вала 16, вращающего с числом оборотов, которое зависит частично от подаваемого напряжения и нагрузки. Число оборотов вала двигателя 10 определяется датчиком 36 тахометра, преобразуется из аналогового сигнала в цифровой сигнал многофункциональной платой 37 ввода-вывода и передается в компьютер 42. Датчик 36 тахометра может быть кодирующим устройством угловой скорости или встроенным тахометром, вмонтированным в конструкцию двигателя 10. Многофункциональная плата дополнительно подсоединена к датчику 34 напряжения, который может быть, например, зондом с делением напряжения 1:100, и датчику 35 тока, предпочтительно с минимальным временем срабатывания 23 наносекунды (примеры приемлемых датчиков тока включают в себя токовый зонд переменного/постоянного тока на 100 ампер Tektronix 6303, блок питания Tektronix 502а и усилитель токового зонда переменного/постоянного тока Tektonix 503b). Сигналы с датчиков 34 и 35 также преобразуются платой 37 и вводятся в компьютер 42. Компьютер 42 записывает данные датчиков в запоминающее устройство (не показанное).
Компьютер 42 реализует модель обнаружения и диагностики повреждений идеального двигателя, которая также хранится в запоминающем устройстве. В предпочтительном варианте осуществления изобретения вначале разрабатывают модель двигателя с использованием алгоритма идентификации многосвязной системы. Инструментарии экспериментального моделирования (ИЭМ), разработанные Ах - метом Дюйяром и теперь имеющиеся в продаже в фирме Эдванст прогностик системз, инк. (Advanced Prognostic Systems, Inc), 4201 Бульвар Северного океана (North Ocean Boulevard), Комплект 206, Боса Raton, 33431 Флорида. ИЭМ является инструментом экспериментального моделирования, который создает математическое уравнение, описывающее динамические соотношения между измерениями входных и выходных сигналов, полученными от экспериментов, предназначенных для обеспечения характеристик системы в выбранном диапазоне возможных режимов работы. Такая информация включает в себя ширину полосы частот системы, оптимальную частоту и продолжительность развертки и входной сигнал, достаточно большой для использования системы по всей ширине полосы частот системы. Как известно в этой области, экспериментальное моделирование представляет выбор математических соотношений, которые кажутся соответствующими наблюдаемым входным и выходным данным. В соответствии с этим во время процесса моделирования выводят уравнения, которые описывают поведение различных элементов системы и взаимосвязи этих элементов.
Экспериментальная модель системы описывается системой дифференциальных уравнений, представленной в матричной форме. Программа ИЭМ определяет структуру системы, то есть порядок системы, параметры и постоянные коэффициенты переменных дифференциальных уравнений. В предпочтительном варианте осуществления изобретения структура определяется путем создания информационной матрицы, использующей входные и выходные данные. Для определения структуры системы используется поиск построчного ранга этой матрицы. Теоретическая концепция в определении поиска построчного ранга объясняется более полно в опубликованном документе под названием "Представление пространства состояний динамики разомкнутого цикла основного двигателя космического корабля Шаттл" Ахмета Дюйяра, Васфи Элдема, Уолтера К.Меррилла и Тен-Хьюэй Гуо ("State Space Representation of the Open-Loop Dynamics of the space Shuttle Main Engine" by Ahmet Duyar, Vasfi Eldem, Walter C.Merrill and Ten-Huei Guo), декабрь 1991 г., том 113, журнал "Измерение и управление динамических систем "(Journal of Dynamic Systems, Measurement and Control) на страницах 684-690, раскрытие которых включено здесь путем ссылки.
После определения структуры системы становятся известными ряд параметров, содержащихся в системе дифференциальных уравнений. Полученные в результате измерений данные используются с системой дифференциальных уравнений, содержащих неизвестные коэффициенты, чтобы образовать несколько уравнений. Количество образованных уравнений больше, чем количество неизвестных коэффициентов. Для определения неизвестных коэффициентов используется известный в технике и описанный в вышеупомянутом документе метод наименьших квадратов.
Соответствующая настоящему изобретению модель, основанная на схеме обнаружения и диагностики повреждений, описывает двигатель без неисправностей с помощью ряда уравнений, описываемых более подробно ниже. Поскольку неисправности в двигателе 10 изменяют параметры, уравнения двигателя 10 отличаются от ожидаемых уравнений, образованных моделью. Соответствующая настоящему изобретению схема полагается на концепцию аналитической избыточности, где сигналы, генерируемые моделью, сравниваются с измеренными сигналами, полученными от двигателя 10, для определения, правильно ли функционирует двигатель. Модель заменяет необходимость разрабатывать предварительную информацию относительно двигателя. Основываясь на сравнении, компьютер 42 определяет, является ли двигатель исправным, посредством вырабатывания количеств остатков и их анализа. Настоящее изобретение разрабатывает прогнозы информации, жизненно важной для ранней диагностики приближающихся неисправностей электродвигателей в процессе функционирования под неизвестными нагрузками.
В качестве пояснения рассмотрим систему без неисправностей, описываемую следующими уравнениями дискретных состояний в пространстве:
x(k +1) = A x(k) + В u(k) (1)
y(k) = С x(k) (2)
где x, u и y - n x 1 вектор состояния, p х 1 вектор ввода и q х 1 вектор вывода соответственно, a k обозначает дискретные приращения времени. А, В и С представляют известные номинальные матрицы (параметры) системы с соответствующими размерами. При использовании электродвигателя мощности менее 1 лошадиной силы, например, экспериментальная модель использует измерения входного напряжения, тока и числа оборотов.
На фиг. 3 показан график входного напряжения 38, используемого для приведения в действие двигателя 10. В предпочтительном варианте осуществления изобретения входное напряжение 38 представляет ступенчатый входной сигнал и представлено в экспериментальной модели как вектор-строка, содержащий полученное в результате измерения напряжение. На фиг. 4 показаны полученные экспериментальным путем выходные сигналы 39 и 40 тока и числа оборотов соответственно, где полученные в результате измерения выходные сигналы тока и числа оборотов показаны сплошной линией. Описание полученной системы можно представить уравнениями (3) и (4), где матрица А в представлении пространства состояний в качестве примера имеет форму, представленную в конце описания, матрица B и выходная матрица С, которая связывает переменные с выходным сигналом, также представлены в конце описания.
В дополнение к дискретным матрицам А, В и С системы, которые определены в соответствии с программой моделирования, также определяется стандартная ошибка оценки (COO), COO предусматривает оценку ошибки моделирования посредством сравнения моделированного выходного сигнала с измеренным выходным сигналом. В случае вышеупомянутого примера COO для модели составляет 2,8% для выходного сигнала тока и 0,67% для выходного сигнала числа оборотов.
Когда в двигателе 10 возникает неисправность, параметры и, следовательно, реакция системы 30 будет отличаться. При обозначении дефектных параметров и переменных системы подстрочным индексом f описывающие неисправную систему уравнения примут следующий вид:
xf(k+l)= Af xf(k) + Bf uf(k) (3)
yf(k) = Cf xf(k) (4)
В простейшей форме, вектор остатка, r(k), можно определить как разность между выходным сигналом системы без неисправностей и выходным сигналом неисправной системы в виде:
r(k)= yf(k)-y(k) (5)
При отсутствии шума и ошибок моделирования вектор остатка r(k) равен нулевому вектору в условиях отсутствия неисправностей. Ненулевое значение вектора остатка указывает на существование неисправностей. Когда присутствуют шум и ошибки моделирования, их влияние следует отделять от влияния неисправностей путем сравнения величин остатка с выбранными пороговыми значениями. При использовании наблюдаемого распределения остатков при условиях отсутствия неисправностей пороговые значения определяются путем выбора уровня достоверности (в пределах трех среднеквадратических отклонений), чтобы были минимизированы сигналы ложной тревоги и пропущенные неисправности.
Рассмотрим теперь фиг. 6, на которой используется идентифицирующий алгоритм со многими переменными, ИЭМ, для создания базовой линейной экспериментальной модели 44 двигателя 10. Модель 44 содержит параметры разностных уравнений, то есть А, В и С, и их порядки, то есть n в уравнениях (1) и (2). В противоположность параметрам теоретически выведенной модели параметры экспериментальной модели не обеспечивают физические значения. Другими словами, изменения этих параметров не могут использоваться для понимания причинно-следственных отношений. Хотя физический смысл параметров утерян, экспериментальная модель обеспечивает достаточно точное представление двигателя 10, поскольку при ее получении не использованы никакие предположения. Однако система 30 устраняет необходимость полагаться на предварительную информацию относительно конструкции двигателя 10, кроме предположения, что двигатель 10 первоначально является исправным.
Выходные сигналы модели 44 оцениваются с помощью алгоритма ИЭМ компьютером 42, использующим измерения, полученные от датчика 34 напряжения, датчика 36 скорости и датчика 35 тока, с целью получения выходного сигнала модели. Выходной сигнал модели сравнивается с выходным сигналом двигателя при указании сумматором 46 образовать остаток (k). Компаратор 48 определяет, равен ли вектор остатков r(k) нулевому вектору и соответственно функционирует ли двигатель при условии отсутствия неисправностей. Если компаратор 48 определяет, что вектор остатков r(k) имеет ненулевое значение, отображается одна или больше неисправностей. Однако, поскольку обычно присутствуют шум и ошибки моделирования, значение вектора остатков r(k) сначала сравнивается с выбранными пороговыми значениями для исключения ложных показаний. Если величина остатка меньше пороговой величины, вероятнее всего, что ненулевое значение обусловлено таким шумом или ошибкой моделирования, и двигатель 10 считается исправным. Тогда система 30 сообщает об исправном характере системы, как обозначено в блоке 50. Однако, если величина остатка превышает порог, то отмечается неисправность, и система 30 начинает анализ 52 неисправности. На основании анализа 52 неисправность классифицируется и сообщается пользователю (блок 54) или сохраняется в компьютере 42 для будущей ссылки.
Используя основанную на модели диагностическую программу, можно моделировать текущую реакцию двигателя в условиях отсутствия неисправностей и впоследствии сравнивать с текущей реакцией того же самого двигателя во время работы. В настоящем изобретении компьютер 42 включает в себя средство для итеративного выполнения алгоритма обнаружения повреждений с целью предсказания, обнаружения и классификации механических неисправностей электродвигателей. Соответствующие настоящему изобретению систему и способ можно использовать и в производстве, и в условиях эксплуатации.
Классификация неисправностей выполняется путем определения изменений, происходящих в параметрах двигателя 10, и связывания изменений с неисправностями двигателя, используя физические параметры теоретически полученной модели. Рассмотрим упрощенные теоретические уравнения (6) и (7), описывающие универсальный двигатель, способный работать как на постоянном, так и на переменном токе, подвергаемый действию входного сигнала напряжения постоянного тока:
L di/dt + Ri = V + k1 wi (6)
J dw/dt + fw = k2 i2 + M (7)
где L, R, J и f представляют коэффициенты индуктивности, сопротивления, момента инерции и трения двигателя соответственно, в то время как k1 и k2 - постоянные двигателя. В уравнениях (6) и (7) выходные переменные, ток и скорость, обозначены символами i и w соответственно, в то время как входная переменная, напряжение, обозначена символом V. Нагрузка обозначена индексом М.
В алгоритме КСД нагрузка М в общем не является доступной или легко измеряемой. Поэтому для использования диагностическим наблюдателем необходимо преобразовать уравнения (6) и (7) с целью исключения члена нагрузки. В одном варианте осуществления изобретения диагностический наблюдатель просто основывает модель на уравнении 6, которое является независимым от нагрузки. Хотя в таком варианте осуществления изобретения для диагностического наблюдателя обеспечивается частичная информация, трение двигателя и постоянная k2 отсутствуют, и здесь может быть более высокий процент неизвестных сообщений о неисправностях. В соответствии с этим, если такая информация необходима, диагностический наблюдатель может взять производную уравнения (7), которая исключает член нагрузки, полагая нагрузку постоянной. Как будет ясно специалистам в данной области техники, для устранения члена нагрузки имеются другие возможные математические средства, такие как выражение уравнений (6) и (7) в матричной форме и перемножение обеих сторон с соответствующими матричными операторами.
Обратимся снова к фиг. 1 и 2, на которых обычные механические неисправности могут возникать в результате несбалансированного ротора 12, неровно затянутых винтов 28 или неисправных подшипников 18, коллектора 22 или шкива 20. Эти механические неисправности вызывают вибрацию и шум после установки двигателя 10 и использования с нагрузкой М. Распознавая, что механическая вибрация означает физическое смещение, вибрация, вызванная дефектами подшипника, создает периодическое смещение вала 16. В электродвигателе ведущий вал вращается узлом якоря. Механические неисправности вызывают несоосность ротора, которая, в свою очередь, приводит к несимметричному воздушному зазору и изменяет индуктивность, сопротивление и постоянные параметры электродвигателя, которые все включены в уравнение (6). Поскольку ток, протекающий через электродвигатель, частично является функцией магнитного поля в воздушном зазоре между якорем и статором (или катушками возбуждения), периодическое смещение, вызываемое в ведущем вале, влияет на симметрию воздушного зазора и магнитного поля в воздушном зазоре. Магнитное поле в воздушном зазоре, в свою очередь, влияет на ток, протекающий через двигатель. Поскольку возмущающее влияние на магнитное поле в воздушном зазоре является периодическим и известной частоты, таким же является влияние на ток.
В соответствии с этим изменение номинальной величины параметра индуктивности L связано с неисправностью несбалансированного ротора. Наблюдаемое изменение параметра сопротивления R рассматривается как индикация неисправности коллектора. Неисправность подшипника определяется, когда проявляется колебательное поведение изменения коэффициента индуктивности и/или когда последовательно изменяются коэффициенты и индуктивности, и трения.
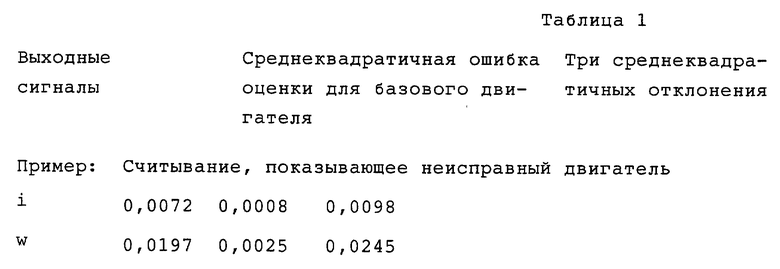
В таблицах 1 и 2 показаны параметры при отсутствии и наличии неисправностей, а также среднеквадратичные отклонения параметров без неисправностей. В таблице 1 для данных напряжения V и нагрузки М выходные значения тока и числа оборотов, предсказанные моделью 44, показаны вместе с параметром выбранного допуска (три среднеквадратичных отклонения) и примером измерений тока и числа оборотов. Как будет отмечено, измерение тока превышает предсказанное значение больше, чем на три среднеквадратичных отклонения. В соответствии с этим указывается неисправность.
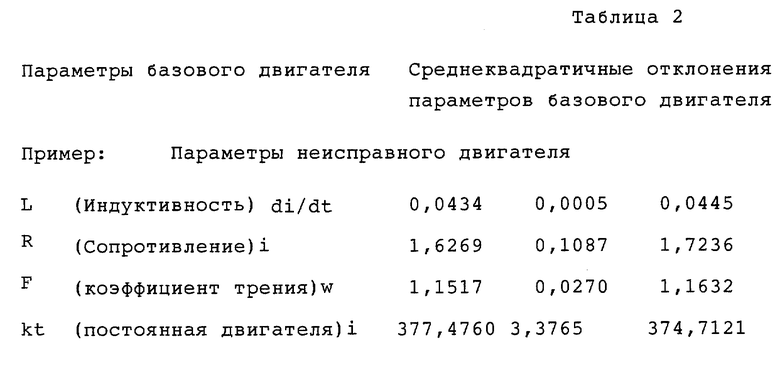
Параметры неисправного двигателя 10 исследованы в таблице 2. Как будет отмечено, индуктивность L неисправного двигателя 10 превышает соответствующий параметр индуктивности, предсказанный моделью 44, больше чем на одно среднеквадратичное отклонение, в то время как все другие параметры меньше, чем предсказанное значение плюс одно среднеквадратичное отклонение. Как отмечено выше, этот тип неисправности свидетельствует о неисправности типа несбалансированного ротора, которая сообщается элементом 54 классификации неисправности системы 30.
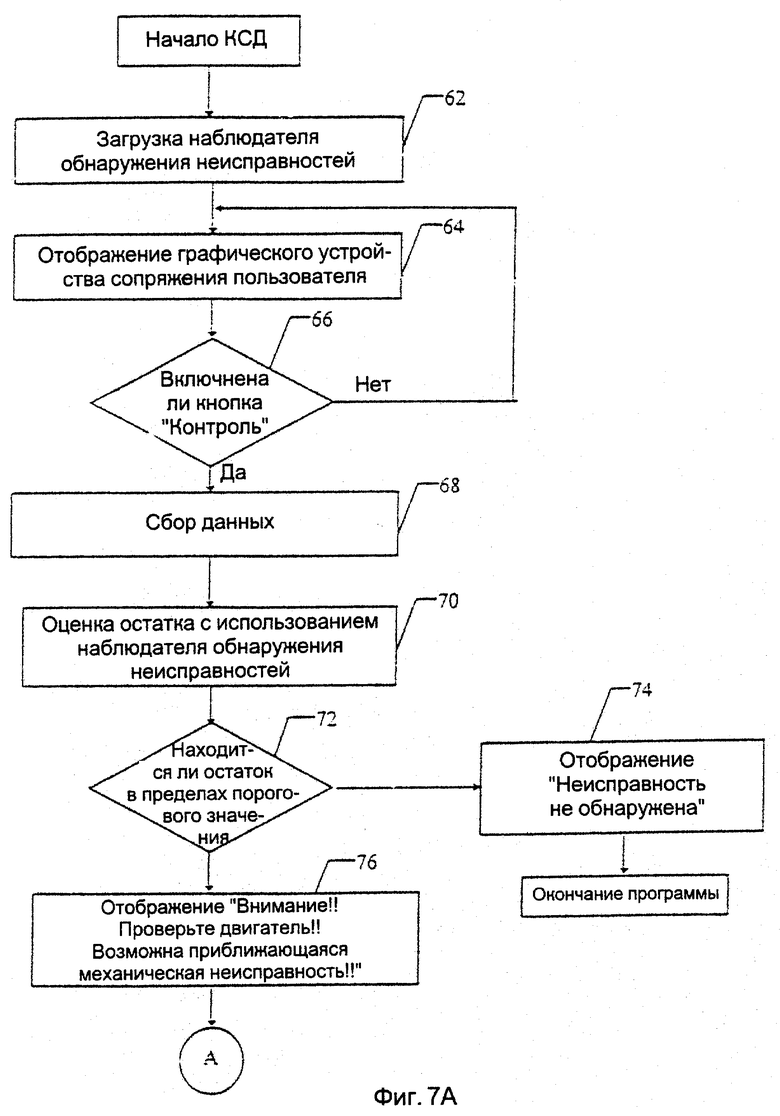
Схемы последовательности операций на фиг. 7А-7В суммируют этапы для осуществления системы 30 после разработки модели 44. В частности, в выбранные интервалы времени на этапе 62 компьютер 42 загружает модель 44 в запоминающее устройство и на этапе 64 отображает информацию для пользователя на участке дисплея компьютера 42. После приема команды относительно инициирования контроля двигателя 10, с предварительно установленными интервалами времени или непрерывно, на этапах 66 и 68 система 30 начинает получать данные с датчиков 34 - 36. Сбор данных продолжается со скоростью, которую может определять пользователь. Компьютер 42 вычисляет остаточные величины r(k), которые затем на этапе 72 сравнивают с ожидаемым остатком, разработанным моделью 44. Если остаток находится в пороговых пределах, двигатель функционирует без неисправностей, и эта информация на этапе 74 отображается на отображающем устройстве компьютера 42 для пользователя. Однако, если указывается неисправность, эта информация отображается на дисплее на этапе 76.
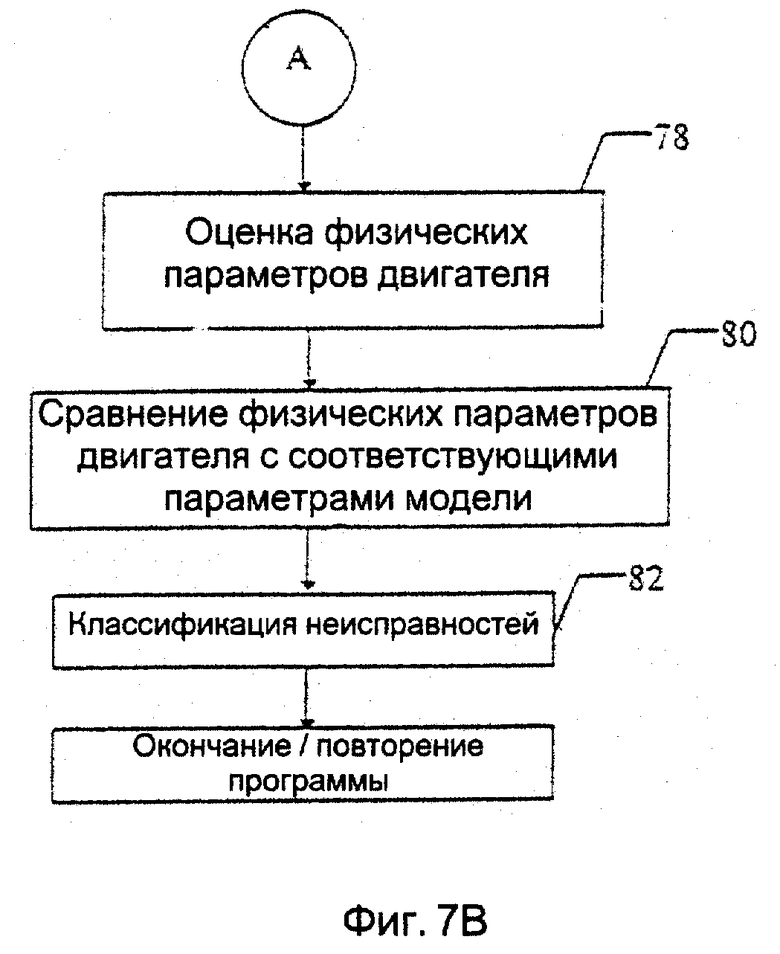
Как только неисправность обнаружена, система 30 способна оценить неисправность и обеспечить диагностическую информацию для пользователя. Используя прогнозирующий характер настоящего изобретения, можно избежать дорогостоящей незапланированной катастрофической неисправности. Как показано на фиг. 7В, участок диагностического наблюдателя модели 44 на этапе 78 оценивает физические параметры, то есть ток i и угловую скорость w двигателя 10, и сравнивает эти параметры с соответствующими параметрами модели 44 (см. также таблицу 2). Основываясь на сравнении, система 30 способна классифицировать и отображать механическое основание неисправности или ухудшение характеристик двигателя, как показано на этапе 82. Модель 44 заменяет необходимость разрабатывать предварительную информацию относительно двигателя.
Алгоритм, выполняемый компьютером 42, называется со ссылкой на фиг. 6А и 7В контролем состояния двигателя (КСД). Основная концепция в контролировании состояния двигателя заключается либо в периодическом, либо в непрерывном наблюдении изменений параметров относительно тех же параметров, полученных в результате оценки, когда было известно, что двигатель функционирует удовлетворительно, например при его начальном вводе в эксплуатацию, когда известно, что двигатель функционирует без неисправностей. Во время последующей работы двигателя - отклонение выходных сигналов от опорных выходных сигналов. Затем это отклонение сравнивается с заранее определенными пороговыми значениями. Если отклонение превышает пороговое значение, выявляется неисправность. Неисправность классифицируется путем оценивания параметров диагностической модели и сравнения параметров с их первоначальным значением, снова используя соответствующие пороговые значения для этих параметров.
При изготовлении электродвигателей можно разработать модель, которая охватывает область изменения технологического процесса, а не использует параметры, полученные от одного двигателя, как описано выше при описании системы и способа КСД. Эта концепция используется для разработки способов обнаружения и диагностики механических неисправностей электродвигателей в качестве части процедуры испытания во время процесса изготовления и, в частности, для этапа процесса обеспечения качества, который используют большинство изготовителей непосредственно перед отгрузкой двигателя. Для обеспечения качества используют способ и алгоритм, называемый контролем качества двигателя (ККД), использование этого способа согласно изобретению обсуждается ниже.
Основные функции алгоритма ККД заключаются в испытании электродвигателя, отображении результатов испытаний, управлении экспериментальным испытанием (то есть создании базовой модели, как будет описано более подробно ниже) и запоминании полученных в результате измерений и оцифрованных данных в запоминающем устройстве для архивных целей. Поскольку не имеется надежного способа или измерения, чтобы идентифицировать двигатели без неисправностей, сначала разрабатывают способ получения модели типичных двигателей без неисправностей ("базовой модели").
Более подробное объяснение способа ККД изображено на фиг. 8A-8F. Способ ККД охватывает две основные функции: (1) разработка базовой модели двигателя и (2) постоянное испытание обеспечения качества электродвигателей мощностью менее 1 лошадиной силы. Пользователь может выбирать любую функцию из меню, представленного на устройстве отображения компьютера 42. В предпочтительном варианте осуществления изобретения вводятся "определяемые пользователем" параметры, пороговые пределы и количество подлежащих испытанию двигателей, например, прежде, чем пользователь выберет один из следующих трех вариантов: "Разработка базовой модели двигателя", "Выбор базовой модели двигателя" или "Проверка обеспечения качества".
Если на этапе 90 базовый двигатель отсутствует, то на этапе 92 необходимо первоначально выбрать вариант "Разработка базовой модели двигателя", где пользователя просят обеспечить информацию, представленную в таблице 3, если на этапе 94 она отличается от значения, установленного по умолчанию.
Выбор варианта "Разработка базовой модели двигателя" обязателен, когда сначала устанавливают алгоритм ККД. Пользователь имеет вариант разработки базовых двигателей для различных типов электродвигателей или даже для одного и того же типа электродвигателей, но с различными множителями допуска. Получают модель двигателя, его параметры и их среднеквадратичные отклонения и запоминают в указанном файле данных.
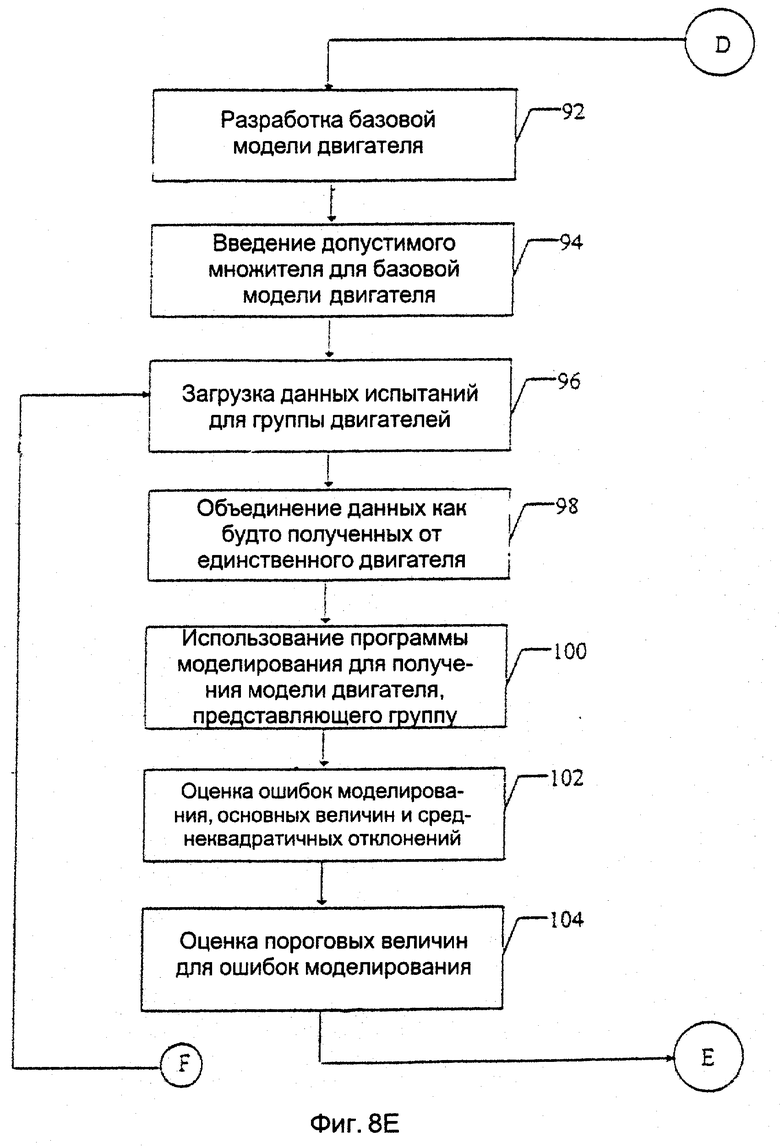
На этапе 96 разрабатывают базовую модель двигателя на основании группы двигателей, известной как содержащей главным образом двигатели без неисправностей. В одном предпочтительном варианте осуществления настоящего изобретения для разработки базовой модели двигателя используются данные, полученные от группы электродвигателей. Специалистам в данной области техники должно быть понятно, что такая группа двигателей может содержать двигатели без неисправностей, а также некоторые неисправные двигатели из-за свойственной неэффективности процесса испытания и изготовления.
При использовании программы системы программного обеспечения ИЭМ на этапах 98 - 100 разрабатывают экспериментальную модель выбранного типа двигателей, которая представляет характеристики выбранного типа электродвигателей. На этапах 102 -104 модель оценивают относительно очевидного моделирования и пороговых ошибок.
При использовании базовой модели двигателя, разработанной на основании группы, каждый двигатель в группе затем на этапе 106 испытывают относительно экспериментальной базовой модели двигателя, используя значения допуска, полученные из проектируемого среднеквадратичного отклонения COO. Если выходные сигналы одного из двигателей в группе отклоняются от выходных сигналов экспериментальной модели больше, чем соответствующие значения допуска, этот двигатель исключают из группы, и на этапах 108 - 112 файлы данных чистят, чтобы удалить дефектные данные. Затем предпринимается дальнейшее усовершенствование базовой модели двигателя, используя данные испытаний подмножества двигателей, остающихся в группе. После удаления всех двигателей, имеющих выходные сигналы за пределами значений допуска, установленных экспериментальной моделью, можно на этапе 114 дополнительно усовершенствовать экспериментальную модель посредством оценки ошибок моделирования, среднего и среднеквадратичного отклонений группы, пока группа не будет содержать только те двигатели, у которых выходные сигналы находятся в пределах допустимых коэффициентов, выбранных для экспериментальной модели. После повторения этого итеративного процесса экспериментальная модель представляет характеристики двигателей без неисправностей, изготовленных с такими же техническими характеристиками. На этапе 116 экспериментальная модель запоминается в качестве базовой модели двигателя в базе данных, хранящейся в запоминающем устройстве компьютера 42 для будущей ссылки.
Если базовая модель двигателя уже существует, вышеупомянутый процесс можно сократить, просто перезагружая базовую модель двигателя в активную память компьютера 42, и пользователь может выбирать вариант "Выбор базовой модели двигателя", а затем начинать выполнять "Проверку обеспечения качества". Пользователю могут быть представлены различные варианты. Например, базовая модель двигателя может соответствовать универсальному, асинхронному двигателю с экранированными полюсами, синхронному двигателю или любому другому электродвигателю мощностью менее 1 лошадиной силы. Обратимся снова к фиг. 8А, на которой соответствующая базовая модель двигателя для испытываемых двигателей загружается в запоминающее устройство компьютера, если выбран вариант "Выбор базовой модели двигателя", или, если выбран вариант "Проверка обеспечения качества", на этапе 120 начинается испытание типа двигателя по умолчанию. В это время пользователь на этапах 122 и 124 может вводить регулировки в допустимые множители для обнаружения повреждений и классификации неисправности. Затем на этапах 126-128 алгоритм ККД рассчитывает соответствующие пороговые значения обнаружения повреждений и классификации неисправностей.
На фиг. 8В показана часть измерения алгоритма ККД, где полученные в результате измерений величины выходных сигналов двигателя сравниваются с выходными сигналами, полученными от базовой модели двигателя с использованием выбранных пороговых значений во время испытания электродвигателей во время процесса изготовления с целью обеспечения качества. Пороговые значения определяют посредством умножения значений допуска, используемых при разработке экспериментального базового двигателя, на допустимый множитель. Алгоритм ККД позволяет определять множители обеспечивающему качество инженеру, который принимает во внимание приемлемые изменения выходных сигналов двигателей, обусловленные нормальными производственными изменениями. Если отклонения превышают заранее выбранные пороговые значения, испытываемый двигатель определяется как имеющий неисправность. В частности, после выбора базовой модели двигателя, пользователь на этапах 130 - 134 вводит необходимые параметры для выполнения "Проверки обеспечения качества", как суммировано в таблице 4.
При выполнении "Проверки обеспечения качества" алгоритм вычисляет пределы обнаружения и классификации повреждений в соответствии с выбранным типом двигателя и соответствующими допустимыми множителями. Алгоритм на этапе 134 инициализирует сбор данных для получения сигналов напряжения, числа оборотов и тока в реальном масштабе времени от испытываемого двигателя. Эти сигналы на этапах 130 - 132 оцифровываются с использованием ранее введенных значений скорости развертки и времени развертки. Оцифрованные сигналы на этапе 136 запоминаются в запоминающем устройстве и на этапе 140 обрабатываются с целью устранения шума, используя фильтр программного обеспечения Баттеруорта или любой из имеющихся в продаже фильтров.
На этапах 142 и 144 сигналы напряжения, числа оборотов и тока в реальном масштабе времени используются базовой моделью двигателя для определения моделируемого представления состояния двигателя в текущих условиях. Как показано на этапе 146, рассчитываются остаток оценки базовой модели двигателя и фактический остаток испытываемого двигателя и на этапе 148 сравниваются. Затем отклонение расчетных остатков сравнивается с пороговыми значениями обнаружения повреждений. Если отклонение выходных сигналов испытываемого двигателя находится в допустимых пределах, двигатель идентифицируется как двигатель без неисправностей, и на этапе 150 сообщение отображается или регистрируется другим способом.
Когда двигатель выявлен как неисправный, на этапе 152 отображается сообщение и, как показано на этапе 154, выполняется классификация неисправности, используя диагностическую модель способом, аналогичным описанному выше. В итоге, полученные теоретическим путем уравнения (6) и (7), описывающие электродвигатели, используются в качестве диагностической модели. Физические параметры диагностической модели определяются экспериментальным путем из данных, полученных от упомянутой выше группы двигателей. Физические параметры диагностической модели и связанные среднеквадратичные отклонения запоминаются в запоминающем устройстве компьютера 42.
При обнаружении неисправности двигателя физические параметры неисправного двигателя на этапах 156 - 162 оцениваются алгоритмом ККД и сравниваются с соответствующими параметрами базовой модели двигателя. Результат этого сравнения используется для классификации неисправности электродвигателя и отображения диагностической информации.
Если отклонения остатков выше пороговых значений, состояние электродвигателя классифицируется фразой "Найдена неисправность" или аналогичной ей на информативной части участка дисплея компьютера 42. После идентификации оцениваются физические параметры неисправного двигателя. Эти параметры сравниваются с физическими параметрами базовой модели двигателя, используя пороговые значения классификации неисправности (см. таблицу 4). Для универсального электродвигателя физическими параметрами являются коэффициенты индуктивности, сопротивления и трения и постоянные электродвигателя, как предложено в уравнениях (5) и (6). Каждый из параметров неисправного двигателя сравнивается с вышеупомянутыми пороговыми значениями классификации неисправности. Характерный образец одного возможного дерева решений для классификации неисправностей показан на этапах 164-170.
Например, если параметр индуктивности неисправного двигателя превышает пороговое значение классификации неисправности в части индуктивности, решение отображается в виде выражения "Проверка баланса".
Если параметр сопротивления неисправного двигателя превышает пороговое значение классификации неисправности в части сопротивления, решение отображается в виде фразы "Проверка коллектора". Если оба параметра и трения, и индуктивности неисправного двигателя превышают пороговые значения классификации неисправности, решение отображается в виде фразы "Проверка подшипника".
Если в одно и то же время превышены больше одного порогового значения, отображаются все результирующие решения.
Если величины всех параметров оказываются меньше, чем соответствующее пороговое значение, решение на информативной части отображающего устройства отображается в виде слова "неклассифицирован". Это может происходить из-за кумулятивного действия изменений в каждом параметре на выходные сигналы двигателя. В такой ситуации модель может иметь множество, но маленьких неисправностей, которые могут накапливаться, вызывая превышение выходных сигналов модели пороговых значений. Однако, поскольку пороговое значение выбирает пользователь, можно сжать значения допуска для каждого параметра так, чтобы можно было обнаружить такие предельные неисправности.
Способ ККД, в частности, хорошо подходит для использования в ремонтных мастерских электродвигателей, с целью диагностирования неисправностей и для профилактических целей при эксплуатации. При таком применении в компьютере 42 хранятся базовые модели двигателей для нескольких электродвигателей различных размеров и изготовителей. При получении неисправного двигателя ремонтный рабочий выбирает базовую модель двигателя для испытываемого двигателя и выполняет обнаружение и диагностику повреждений.
Способ и устройство также можно использовать для контроля состояния и прогнозирующих применений технического обслуживания. В этом третьем варианте осуществления изобретения алгоритм ККД заменяет алгоритм КСД либо для периодических, либо для непрерывных применений контроля состояния. В дополнительном варианте осуществления изобретения алгоритмы ККД и КСД используются непосредственно с существующей системой контроля обеспечения качества или состояния соответственно, где уже существуют возможности сбора данных по измеряемому напряжению, числу оборотов и току.
В заключение следует отметить, что алгоритм КСД и алгоритм ККД очень похожи, но каждый отличается от другого двумя аспектами. Во-первых, в алгоритме КСД система не создает базовую модель двигателя. Это обусловлено характером контроля состояния, где система имеет дело только с контролем одного двигателя. По этой причине способ КСД благоприятно использует специализированную модель контролируемого двигателя. Специализированная модель разрабатывается, когда известно, что двигатель эксплуатируется в состоянии без неисправностей. В противоположность этому алгоритм ККД создает базовую модель, которая охватывает разновидности, обычно связанные с большой совокупностью. В соответствии с этим для предельно работающего двигателя возможно пропустить пороговые значения испытаний, установленные в модели ККД, но маловероятно, что продолжающееся ухудшение характеристик будет проходить необнаруженным КСД, поскольку модель КСД определена для отдельного двигателя.
Второе различие, которое возникает между двумя алгоритмами, заключается в том, что КСД обязательно ограничивается эксплуатационными требованиями. Например, подаваемый на двигатель входной сигнал зависит от требования, налагаемого применением. Можно понять, что подаваемый на модель 44 входной сигнал может быть не настолько "ценным" входным сигналом, который можно было бы применять во время испытания ККД. Кроме того, при испытании КСД, действующая нагрузка, прикладываемая к двигателю, неизвестна и может изменяться в течение периода времени, в котором получаются результаты измерений от датчика 34-36. При этих обстоятельствах моделируется только та часть модели, на которую не воздействует нагрузка. Например, для получения результатов с использованием диагностического наблюдателя будет использоваться только уравнение (6), чтобы смоделировать сигнал тока, используя полученные в результате измерений входные сигналы напряжения и числа оборотов. В альтернативных вариантах осуществления изобретения для исключения неизвестного члена нагрузки в случае постоянной нагрузки можно использовать способы типа взятия производной уравнения (7). В таких вариантах осуществления изобретения уравнение (6) и производную уравнения (7) можно объединять для улучшения результатов, полученных диагностическим наблюдателем.
Хотя были описаны и показаны на прилагаемых чертежах некоторые примерные предпочтительные варианты осуществления изобретения, должно быть понятно, что такие варианты осуществления изобретения просто приведены в качестве иллюстрации, а не ограничения объема изобретения. Кроме того, следует понимать, что это изобретение не должно ограничиваться показанными и описанными определенными конструкцией и устройствами, поскольку могут происходить различные их модификации или изменения обычного порядка в технике, не выходя при этом за рамки сущности и объема притязаний изобретения, как определено в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ диагностирования технического состояния электрических двигателей по анализу сигналов тока | 2024 |
|
RU2829015C1 |
| Способ диагностики асинхронных двигателей с короткозамкнутым ротором | 2018 |
|
RU2716172C2 |
| Способ диагностирования технического состояния электрических двигателей в режиме реального времени | 2024 |
|
RU2826152C1 |
| БЫТОВОЕ ЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО | 2001 |
|
RU2264488C2 |
| Способ функционального диагностирования жидкостного ракетного двигателя при огневом испытании | 2020 |
|
RU2781738C2 |
| СПОСОБ ОСНОВАННОЙ НА МОДЕЛИ ДИАГНОСТИКИ МЕХАТРОННОЙ СИСТЕМЫ | 2006 |
|
RU2394276C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ЭЛЕКТРИЧЕСКИХ И МЕХАНИЧЕСКИХ ПОВРЕЖДЕНИЙ АСИНХРОННОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2011 |
|
RU2479096C2 |
| Способ определения технического состояния электрических и гидравлических приводов | 2022 |
|
RU2799489C1 |
| СПОСОБ ДИАГНОСТИКИ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА И СВЯЗАННЫХ С НИМИ МЕХАНИЧЕСКИХ УСТРОЙСТВ | 2005 |
|
RU2300116C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ДИАГНОСТИКИ ПРОМЫШЛЕННОГО ОБЪЕКТА НА ОСНОВЕ АНАЛИЗА АКУСТИЧЕСКИХ СИГНАЛОВ | 2020 |
|
RU2749640C1 |












Система предназначена для обнаружения неисправностей и способа контроля и предсказания требований по техническому обслуживанию электродвигателей. Система содержит средство компьютера, соединенное с датчиками, которые обеспечивают непрерывную информацию в реальном масштабе времени о входном напряжении и токе и числе оборотов вала двигателя. Система и способ используют алгоритм экспериментального моделирования со многими переменными для получения математического описания двигателя. Алгоритм сравнивает смоделированный результат с полученным в результате измерений результатом и оценивает сравнения, исходя из остатка, который создается путем вычитания соответствующих сигналов. Диагностический наблюдатель анализирует остаток и определяет, работает ли двигатель без неисправностей или функционирует в ином режиме. При выявлении приближающейся неисправности диагностический наблюдатель оценивает полученные в результате измерений переменные двигателя, определяет отклонение от опорного значения и разрабатывает диагностику вероятного неисправного или поврежденного компонента. Такое выполнение системы позволяет устранить осложнения, вызванные ошибками моделирования и как ложными, так и пропущенными показаниями неисправностей электродвигателя. 6 с. и 21 з.п.ф-лы, 8 ил., 4 табл.
L di/dt + Ri = V + k1 wi,
где k1 представляет постоянную двигателя.
x(k + 1) = Ax(k) + Bu(k),
x(k) = Сx(k),
повторение этапов измерения и умножения, вычисление результата уравнений дискретных пространств состояний
xf(k + 1) = Afxf(k) + Bfuf(k),
yf(k) = Сfx(k),
сравнение различий между y(k) и yf(k), и повторение упомянутой последовательности этапов повторения, вычисления и сравнения до тех пор, пока разность не превысит выбранный порог.
x(k + 1) = Ax(k) + Bu(k),
y(k) = Сx(k),
разработки экспериментальной модели двигателей на средстве компьютера, причем модель имеет пороговый допуск, основанный на двух среднеквадратичных отклонениях относительно среднего значения модели группы, испытания каждого двигателя из группы посредством повторного измерения множества рабочих сигналов и исключения двигателя из группы двигателей, если уравнение испытываемого двигателя превышает пороговый предел, повторения этапов измерения, разработки и испытания до тех пор, пока все двигатели в группе не окажутся в пороговых пределах, усовершенствования экспериментальной модели двигателей на основании двигателей, остающихся в группе, и сохранения экспериментальной модели в средстве компьютера.
xf(k + 1) = Afxf(k) + Bfuf(k),
yf(k) = Сfx(k),
сравнения разностей между y(k) и yf(k).
Ldi/dt + Ri = V + k1wi,
Jdw/dt + fw = k2i2 + M,
где k1 и k2 - постоянные электродвигателя.
x(k + 1) = Ax(k) + Bu(k),
y(k) = Cx(k),
где А, В и С представляют параметры модели системы, и средство для определения неисправностей системы путем измерения параметров двигателей со сравнением с упомянутой моделью системы.
x(k + 1) = Ax(k) + Bu(k),
y(k) = Cx(k),
повторение этапов измерения и умножения, вычисления результата уравнений дискретных пространств состояний
xf(k + 1) = Afxf(k) + Bfuf(k),
yf(k) = Сfx(k),
сравнения разностей между y(k) и yf(k) и повторения последовательности этапов повторения, вычисления и сравнения до тех пор, пока разность не превысит выбранное пороговое значение.
Ldi/dt + Ri = V + k1wi,
Jdw/dt + fw = k2i2 + M
с соответствующим одним из выбранных пороговых значений.
| Измеритель нестабильности временных интервалов | 1976 |
|
SU659996A2 |
| EP 0632283 A1, 04.01.1995 | |||
| Способ определения состояния электродвигателя | 1986 |
|
SU1401323A1 |
| Способ испытания электродвигателя на ресурс | 1988 |
|
SU1561151A1 |
| Способ контроля неравномерности воздушного зазора многофазных электрических машин и устройство для осуществления способа | 1976 |
|
SU585578A1 |

