Изобретение относится к обеспечению связи в системах информационного обмена (СИО) с космическими аппаратами (КА) различного назначения, а именно к способам установления связи КА с земными станциями (ЗС) с целью высокоскоростной передачи информации в радиодиапазонах выше 10 ГГц и в оптических диапазонах.
Современные системы связи, в том числе и спутниковые, характеризуются значительным увеличением объемов информации и оперативности ее доставки, требующей наличия широкой полосы частот и применения остронаправленных антенных систем (ОНА). В следствии существующей высокой загрузки полос частот сейчас наиболее актуальным является применение Ка-диапазона (20-30 ГГц) и намечается переход в диапазоны выше 30 ГГц, а также - применение оптических диапазонов, характеризующихся высокими потерями в облачном слое атмосферы.
Процессу автоматического установления связи в оптическом диапазоне между ЗС и КА, где применяются ОНА, должна предшествовать процедура оптимального автоматического выбора космическим аппаратом земной станции для установления с ней связи, которая должна учитывать состояние атмосферы в зоне радиовидимости (ЗРВ) ЗС. Как отмечалось выше по тексту, прогнозирование погоды в местах дислокации ЗС не обладает необходимой точностью и поэтому необходима разработка способа оценки текущего состояния оптической проницаемости атмосферы в зоне радиовидимости (ЗРВ) ЗС. В связи с высокими требованиями к состоянию атмосферы для обеспечения устойчивой связи орбитальной группировки (ОГ) с земным сегментом на территории России необходимо выполнение следующих условий:
1) рассредоточение большого количества ЗС вдоль южных областей России от Крыма до Хабаровского края в местах с высокой вероятностью благоприятных погодных условий, обеспечивающей наличие нескольких ЗС в одной ЗРВ при углах возвышения над горизонтом не менее 10 градусов для Ка-диапазона и не менее 20 градусов для оптического диапазона;
2) соединение КА межспутниковыми линиями связи в сеть или наличие спутников-ретрансляторов (CP), соединенных межспутниковыми линиями связи в сеть с целью маршрутизации потоков информации на КА или CP, находящихся в ЗРВ земной станции с благоприятными погодными условиями и установившим с ней связь;
3) применение технологии автоматического установления связи на ОБА в ВЛС между ЗС и КА, включающей в себя технологию оптимального автоматического выбора космическим аппаратом земной станции для установления с ней связи, которая должна учитывать состояние атмосферы в зоне радиовидимости ЗС.
Из уровня техники известно, что в отечественных системах информационного обмена с КА в настоящий момент времени применяется принцип заблаговременного планирования сеансов связи и управления, применение которого в современных многоспутниковых группировках является сложно реализуемой задачей, а для решения задачи обеспечения связи космического аппарата с земной станцией в диапазонах, радиопрозрачность которых зависит от состояния атмосферы, особенно в оптическом диапазоне, не всегда целесообразно применение планирования, так как невозможно с высокой вероятностью предсказать состояние атмосферы.
В качестве примера такого подхода может быть выбраны система и метод динамического планирования сети (см. US 9119179 B1, опубл. 25.08.2015). Способ может начинаться с определения сетевых параметров для подключения узлов к сети и переменных решений, связанных с радиостанциями и/или узлами в сети. Ограничения могут быть установлены для сужения возможных значений параметров сети и/или переменных решения. Ограничения могут быть основаны на одном или нескольких из: значений, связанных с подключением радиостанции к узлу в сети, значений, связанных с соединением двух узлов в сети вместе по каналу связи, может ли узел подключиться к узлу GIG и баланс потока в узле GIG. Чтобы найти возможные оптимальные каналы связи, способ может минимизировать уравнение на основе сетевых параметров, ограничений и переменных решения, чтобы определить оптимальные каналы связи между парами узлов в сети, парами узлов и радиостанциями и/или парами радиостанциями.
Такой подход является слишком широким и применение его к задачам данного изобретения невозможно.
Также из уровня техники известны более целенаправленные способы преодоления проблем, связанных с проблемой передачи сигнала в диапазонах, радиопрозрачность которых зависит от состояния атмосферы, особенно в оптическом диапазоне.
Например, система и метод смягчения воздействия атмосферных условий, таких как дождь, туман, облачность, в системе широкополосного доступа с использованием дронов/БПЛА (см. US 9479964 B2, опубл. 25.10.2016). В одном варианте осуществления подсистемы радиосвязи терминала и дрона и средства передачи содержат множество сред передачи. В одном варианте осуществления в ответ на изменения атмосферных условий подсистема радиосвязи дрона переключает среду передачи, чтобы уменьшить влияние атмосферных условий. В другом варианте осуществления подсистемы радиосвязи терминала и дрона выравнивают скорости передачи данных между терминалами в ответ на изменения атмосферных условий, наблюдаемые различными терминалами. В другом варианте осуществления подсистема радиосвязи дрона регулирует мощность передачи по нисходящей линии связи на разные терминалы в соответствии с замиранием из-за атмосферных условий на каждой линии связи.
Указанный в качестве аналога способ не является надежным, поскольку для бесперебойного действия системы нужно, чтобы все входящие в нее БПЛА были активны, что затруднительно, так как БПЛА периодически необходимо заправлять топливом.
Наиболее близким аналогом заявляемого изобретения является способ уменьшения помех для использования в системе беспроводной связи (см. US 8140018 B2, 20.03.2012), образованной множеством сетей радиодоступа, причем каждая сеть радиодоступа имеет сетевой менеджер, выполненный с возможностью связи с множеством связанных узлов с сетевым администратором, и каждая сеть радиодоступа имеет частотный спектр, разделенный на множество подканалов, используемых для беспроводной связи узлами, причем частотный спектр, по меньшей мере, частично перекрывается с частотным спектром одного или нескольких других радиодоступа сети; способ, содержащий этапы: выполнение сетевым администратором каждой сети радиодоступа процесса выделения спектра для выделения подканалов ее узлам; узлы каждой сети радиодоступа, осуществляющие беспроводную связь с использованием выделенных им подканалов; сетевой менеджер одной сети радиодоступа принимает от связанных с ней узлов данные, указывающие фактический уровень помех, испытываемых узлами, причем помехи возникают либо внутри сети радиодоступа, либо извне от других сетей радиодоступа; сетевой менеджер одной сети радиодоступа сравнивает фактический уровень помех с расчетным уровнем помех, возникающих внутри сети радиодоступа, чтобы определить, существует ли необходимость в координации с другим сетевым менеджером для уменьшения помех, возникающих извне, и если да. - сетевой менеджер одной сети радиодоступа уведомляет об этой необходимости сетевого менеджера по меньшей мере одной из других сетей радиодоступа; и сетевой менеджер другой сети радиодоступа снова выполняет процесс выделения спектра связанным с ним узлам, чтобы снизить уровень помех, испытываемых узлами одной сети радиодоступа.
В этом способе предпочтительно этап сравнения включает в себя определение того, превышает ли фактический уровень помех расчетный уровень, по меньшей мере, на пороговую величину.
Предпочтительно также, если сетевой менеджер одной сети радиодоступа определяет, что нет необходимости в координации с другой сетью радиодоступа для уменьшения помех, сетевой менеджер снова выполняет процесс выделения спектра связанным с ним узлам в попытке уменьшить помехи, возникающие внутри сети радиодоступа.
Если узлами системы являются приемопередатчики, этап приема предпочтительно инициируется сетевым администратором, получающим расчетный уровень помех, обнаруживающим, что расчетный уровень превышает заданный уровень, и запрашивающим узлы отправить данные, указывающие фактический уровень помех.
Выбор предпочтительной сети радиодоступа осуществляется сетевым менеджером по принципу наименьших помех.
Указанный в качестве наиболее близкого аналога способ уменьшения помех для использования в системе беспроводной связи близок к решению проблемы, решаемой заявленным способом, однако решает проблему не самым эффективным способом.
Применение остронаправленных антенных систем в высокоскоростных линиях связи борт-Земля в диапазонах выше 10 ГГц эффективна при отсутствии дождя, а в оптическом диапазоне связь возможна только при прямой видимости, т.е. при отсутствии облаков, туманов и т.д., и кроме того требует высокой точности наведения ОНА. Прогнозирование погоды в местах дислокации ЗС не является эффективным решением задачи планирования сеансов связи в линиях связи борт-Земля, т.к. не обладает точностью.
Данное изобретение направлено на решение технической проблемы, связанной с оптимальным выбором космически аппаратом земной станции для автономного установления высокоскоростной связи на ОНА без предварительного планирования.
Новизна предлагаемого изобретения заключается в том, что объекты системы информационного обмена (т.е. КА и ЗС) перед установлением связи осуществляют оценку состояния атмосферы путем изменения ее прозрачности в радиодиапазоне, сильно подверженному влиянию состояния атмосферы (например, в К, Ка или в Q-диапазонах).
Техническим результатом изобретения является создание способа автономного установлением связи на ОНА в высокоскоростных линиях связи КА-ЗС и КА-СР-ЗС в диапазонах выше 10 ГГц и в оптическом диапазоне без участия технического персонала центра управления полетом (ЦУП), осуществляющих предварительное планирование сеансов связи и управления (ССУ).
Технический результат достигается посредством того, что космический аппарат с целью выбора земной станции для установления связи с ней на ОНА принимает сигналы маяков от разных земных станций на малонаправленную антенную систему (МНА) в радиодиапазоне, сильно подверженном влиянию состояния атмосферы, и по качеству этих сигналов определяет оптимальную земную станцию.
Заявленное изобретение проиллюстрировано следующими чертежами:
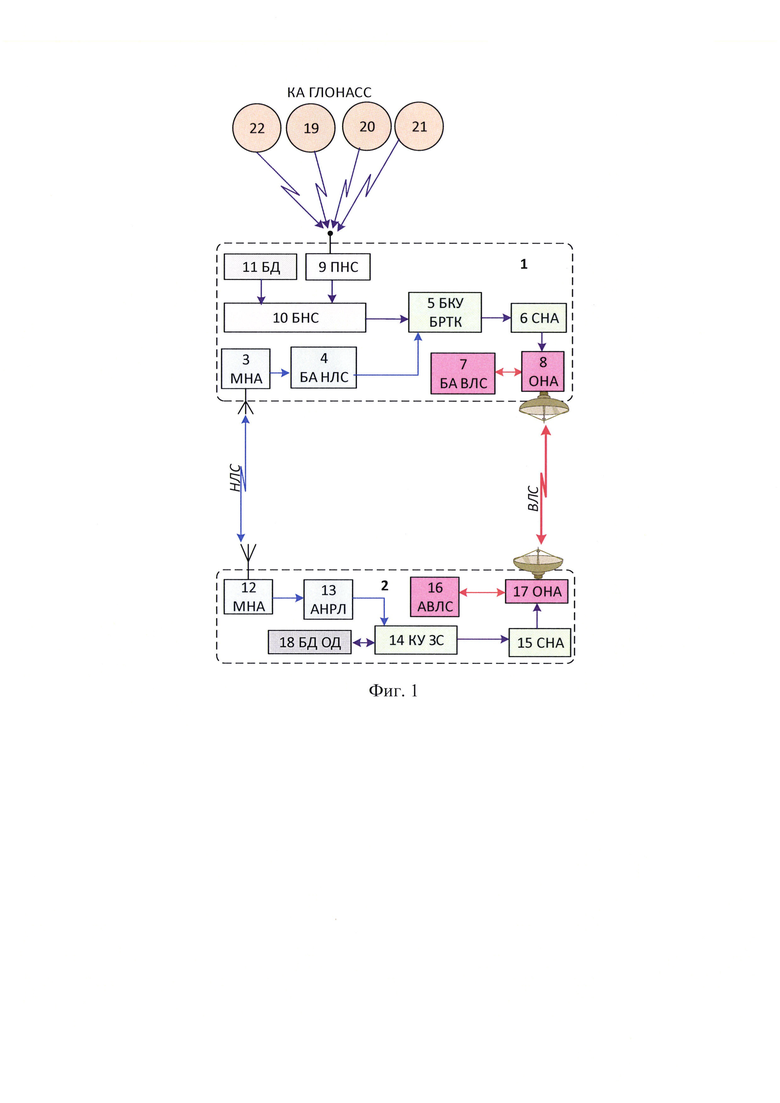
Фиг. 1 - схема организации связи КА - ЗС;
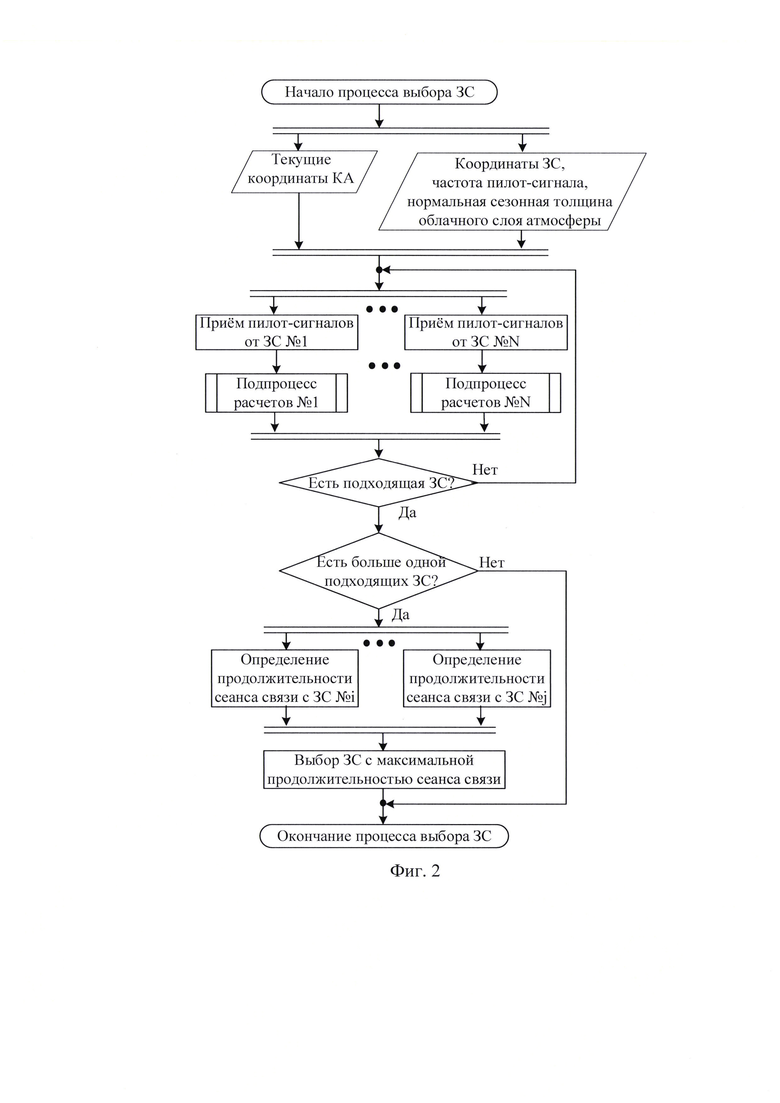
Фиг. 2 - алгоритм выбора космическим аппаратом земной станции для установления связи в оптическом диапазоне;
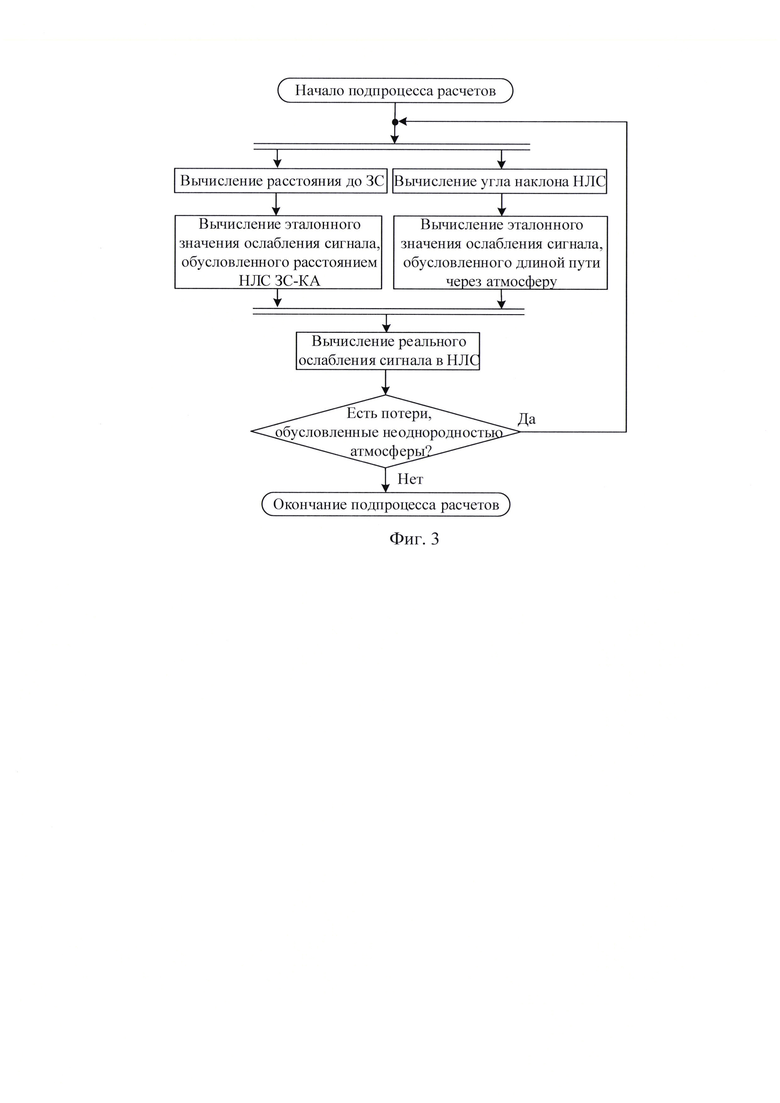
Фиг. 3 - алгоритм подпроцесса расчетов состояния атмосферы в ЗРВ ЗС
Позиции на фигурах обозначают следующее:
1 - космический аппарат (КА);
2 - земная станция (ЗС);
3 - малонаправленная антенная система (МНА) бортовой аппаратуры (БА) низкоскоростной радиолинии связи (НЛС) космического аппарата;
4 - бортовая аппаратура низкоскоростной радиолинии связи космического аппарата;
5 - бортовой комплекс управления работой (БКУ) бортового ретрансляционного комплекса (БРТК) космического аппарата;
6 - система наведения антенны (СНА) остронаправленной антенной системы (ОНА) космического аппарата;
7 - бортовая аппаратура высокоскоростной линии связи (ВЛС) космического аппарата;
8 - остронаправленная антенная система высокоскоростной линии связи космического аппарата;
9 - приемник навигационных сигналов (ПНС) космического аппарата;
10 - бортовая навигационная система (БНС);
11 - базы данных (БД) бортовой навигационной системы;
12 - малонаправленная антенная система земной станции;
13 - аппаратура низкоскоростной радиолинии связи земной станции;
14 - компьютер управления работой (КУ) системой наведения антенны земной станции;
15 - система наведения остронаправленной антенной системы высокоскоростной линии связи земной станции.
16 - аппаратура высокоскоростной линии связи земной станции;
17 - остронаправленная антенная система высокоскоростной линии связи земной станции;
18 - базы данных параметров орбитального движения космических аппаратов;
19, 20, 21, 22 - космические аппараты ГЛОНАСС.
Заявленная система автономного расчета параметров орбитального движения спутниковой системы связи работает следующим образом. При нахождении в орбитальном полете и космического аппарата 1, постоянно вычисляют на основании принимаемых сигналов от навигационных спутников (СНС) ГЛОНАСС 19, 20, 21 и 22 координаты космического аппарата 1, на основании которых бортовая навигационная система 10 космического аппарата 1 производит расчет параметров прогноза орбитального движения. Параметры орбитального движения записывается в базу данных 11 бортовой навигационной системы 10 космического аппарата 1. Запись параметров орбитального движения осуществляется в виде дискретных отчетов координат космического аппарата и соответствующего им текущего времени.
Частота дискретизация этих отчетов зависит от требуемой точности наведения ОНА. Требуемая точность наведения ОНА определяется значениями: скорости кругового вращения КА, поддержания ориентации платформы КА, а также - шириной диаграммы направленности ОНА.
Период, на который производится расчет параметров орбитального движения, зависит от требуемой точности этих параметров и может составлять от 1 витка до одних суток.
Состав устройств КА 1, задействованных в процессе установления связи с ЗС 2 (см. фигуру 1):
- бортовой радиотехнический комплекс (БРТК), состоящий из: бортовой аппаратуры низкоскоростной радиолинии связи 4 с малонаправленной антенной системой 3, бортовой аппаратуры высокоскоростной линии связи 7 с остронаправленной антенной системой 8 и системой наведения антенны 6, бортового комплекса управления БРТК 5;
- бортовая навигационная система 10, состоящая из: приемника навигационных сигналов 9, оснащенного всенаправленной антенной системой и базы данных 11.
Состав устройств земной станции 2, задействованных в процессе установления связи с КА 1 (см. фигуру 1):
- радиотехнический комплекс (РТК), состоящий из: аппаратуры низкоскоростной радиолинии связи 13 с малонаправленной антенной системой 12, аппаратуры высокоскоростной линии связи 16 с остронаправленной антенной системой 17 и системой наведения антенны 17, компьютера управления работой 14 ЗС и базы данных орбитального движения 18.
В линиях связи КА-ЗС высокоскоростная связь осуществляется в ВЛС на ОНА, а низкоскоростная связь осуществляется в НЛС на МНА. При установлении связи космического аппарата с земной станцией сначала происходит прием пилот-сигналов в НЛС и оценка состояния атмосферы по принятому значению отношения сигнал/шум (далее по тексту - signal-to-noise ratio, SNR), выбор по этому критерию земной станции для установления связи, отправка запроса на установление связи и прогноза орбитального движения выбранной земной станции в низкоскоростной радиолинии связи, выполняющей функции служебного канала связи.
Алгоритм установления связи космического аппарата 1 с земной станцией 2 в ВЛС с применением ОНА изображен на фигуре 2 и заключается в следующем.
Дежурный режим работы КА.
Действие 1. КА 1 находится в состоянии приема навигационных спутников СНС ГЛОНАСС и пилот-сигналов от ЗС.
Шаг 1. КА 1, постоянно вычисляют на основании принимаемых сигналов от навигационных спутников СНС ГЛОНАСС 19, 20, 21 и 22 свои координаты ха, уа, za в прямоугольной геоцентрической гринвичской системе координат, на основании которых бортовая навигационная система 10 космического аппарата 1 и периодически производит расчет параметров прогноза орбитального движения, которые записывается в базу данных 11 бортовой навигационной системы 10 космического аппарата 1.
Шаг 2. КА 1, постоянно осуществляет прием пилот-сигналов в НЛС на МНА 3, несущих информацию о номере ЗС.
При необходимости инициализации установления связи КА 1 переходит в режим инициализации установления связи этапа расчета и выбора ЗС.
Действие 2. Определение состояния атмосферы над земными станциями, от которых принимаются пилот-сигналы рассмотрим на примере одной из ЗС.
Шаг 1. Бортовая навигационная система 10 космического аппарата 1 на основании значений координат земных станций 2 ϕg, yg, zg в прямоугольной геоцентрической гринвичской системе координат, от которых поступили плот-сигналы, и текущих координат космического аппарата 1 ха, уа, za в прямоугольной геоцентрической гринвичской системе координат, записанных в базе данных 11 бортовой навигационной системы 10 космического аппарата 1, определяет текущие значения расстояния d до ЗС 2 по формуле:

Примечание: Значение координат стационарных земных станций 2 ϕg, yg, zg в прямоугольной геоцентрической гринвичской системе координат и координат земных станций 2 ϕg, λg, rg (широта, долгота, радиус-вектор) в сферической геоцентрической гринвичской системе координат записано в базе данных 11 бортовой навигационной системы 10 каждого КА, а значение аналогичных координат подвижных земных станций в прямоугольной геоцентрической гринвичской системе координат и в сферической геоцентрической гринвичской системе координат передаются на КА от ЗС в пилот-сигнале.
Шаг 2. Бортовая навигационная система 10 космического аппарата 1 на основании значений координат земных станций 2 ϕg, λg, rg (широта, долгота, радиус-вектор) в сферической геоцентрической гринвичской системе координат на основании текущих координат КА 1 xg, yg, zg в прямоугольной геоцентрической гринвичской координат 1, записанных в базе данных 11 БНС 10 космического аппарата 1, вычисляет текущие значений координат космического аппарата 1 x'g, y'g, z'g в прямоугольной топоцентрической системе координат 1 и определяет текущие значения угла радиогоризонта НЛС с ЗС 2 по формуле:

kсЗ коэффициент сжатия земного шара.
Шаг 3. Бортовой комплекс управления БРТК 5 космического аппарата 1 осуществляет расчет ослабления сигнала на расстояние от ЗС 2 до КА 1 по формуле:

d - расстояние от ЗС 2 до КА 1 (м);
λ - длина волны НЛС (м).
Шаг 4. Бортовой комплекс управления БРТК 5 космического аппарата 1 осуществляет расчет допустимого ослабления сигнала в сухой атмосфере Ao от ЗС 2 до КА 1 с учетом угла радиогоризонта а по формуле:
ho - высота сухого слоя атмосферы (м);
γo - погонное затухание в сухой атмосфере (дБ/км);
α - угол радиогоризонта НЛС от ЗС 2 до КА 1 (рад).
Примечание: значения высоты сухого слоя атмосферы ho и погонного затухания в сухой атмосфере γo вычисляются экспериментально для каждого диапазона, для каждого региона и для каждого сезона.
Шаг 5. Бортовой комплекс управления БРТК 5 космического аппарата 1 осуществляет расчет допустимого ослабления сигнала во влажной атмосфере Aw от ЗС 2 до КА 1 с учетом угла радиогоризонта а по формуле:
hw- высота влажного слоя атмосферы (м);
γw- погонное затухание во влажной атмосфере (дБ/км);
α - угол радиогоризонта НЛС от ЗС 2 до КА 1 (рад).
Примечание: значения допустимой высоты влажного слоя атмосферы hw и допустимого погонного затухания в влажной атмосфере γw вычисляются экспериментально для каждого диапазона, для каждого региона и для каждого сезона.
Шаг 6. Бортовой комплекс управления БРТК 5 космического аппарата 1 осуществляет расчет допустимого ослабления сигнала на распространение с учетом угла радиогоризонта а по формуле:

Шаг 7. Бортовой комплекс управления БРТК 5 космического аппарата 1 осуществляет расчет SNR в виде отношения энергии бита к спектральной плотности шума на входе приемного устройства Eb/No (дБ) по формуле:

PT - мощность излучения передающего устройства ЗС 2 (дБ) - известен БРТК космического аппарата 1 заранее;
GT - коэффициент передающей антенны ЗС 2 (дБ) - постоянная величина;
GR - коэффициент приемной антенны КА 1 (дБ) - постоянная величина;
с'=- 10lgc (дБбит/с) - скорость передачи информации в логарифмическом виде в пилот-сигнале, где: с - скорость передачи информации (бит/с) - постоянная величина и не должна превышать 2,4 кбит/с;
LΣ - расчетное допустимое ослабление сигнала на распространение с учетом угла радиогоризонта а (дБ);
Lo - другие виды ослаблений (дБ) (ослабление в приемном тракте КА 1 и ослабление из-за эллиптичности круговой поляризации принимаемого сигнала) - определяются экспериментально и заранее известны БРТК космического аппарата 1;
Z - допустимый энергетический запас радиолинии БРТК космического аппарата 1 - определяется экспериментально и заранее известен БРТК космического аппарата 1 и как правило не превышает 3 дБ;
No -спектральная плотность и шума (дБ) на входе приемного устройства - определяется экспериментально и заранее известен БРТК космического аппарата 1.
Шаг 8. Бортовой комплекс управления БРТК 5 космического аппарата 1 вычисляет значение ослабления во влажной атмосфере Aw реального принятого сигнала от ЗС 2 с учетом угла радиогоризонта а по формуле:

Eb/No - реально принятое значение;
Ao - расчетное значение;
 заранее известные постоянные параметры.
заранее известные постоянные параметры.
Шаг 9. Бортовой комплекс управления БРТК 5 космического аппарата 1 сравнивает расчетное значение ослабления во влажной атмосфере Aw с реальным значением в полученных пилот-сигналах и если реальное значение ослабление во влажной атмосфере Aw превышает расчетное значение, то это характеризует неблагоприятное состояние атмосферы над данной земной станцией.
Примечание: действия определения состояния повторяется определенное количество раз, длительность которых определяется экспериментально и не должна превышать 1 минуты.
Режим инициализации установления соединения с ЗС.
Действие 3. Выбор наиболее подходящей ЗС для установления связи в ВЛС.
Шаг 1. Сравнение значений SNR и ослабления во влажной атмосфере Aw в принятых пилот сигналах от разных ЗС и выбор наиболее подходящей для установления связи в ВЛС.
Шаг 2. Если заданным требованиям соответствует несколько земных станций, то из них выбирается станция, продолжительность сеанса связи с которой максимальная. Максимальность продолжительность сеанса связи с земной станции выбираются на основании значения доплеровского сдвига частоты пилот-сигнала. Максимальной продолжительности сеанса связи соответствует максимальное значение доплеровского сдвига частоты пилот-сигнала.
Действия 4. Отправка запроса на установление связи.
Шаг 1. БРТК 7 космического аппарата 1 формирует сигнал запроса на установление связи с выбранной земной станции, в котором, кроме того, содержатся информация о прогнозе орбитального движения космического аппарата 1 (например, на один виток), и отправляет его в НЛС с МНА 3 бортовой аппаратуры НЛС 4.
Шаг 2. Земная станция 2 принимает сигнал запроса от космического аппарата 1 на малонаправленную антенну 12 аппаратуры НЛС и компьютер управления работой 14 земной станции осуществляет оценку, может ли земная станция 2 войти в связь с вызывающим космическим аппаратом 2. В результате оценки анализируется загрузка ЗС 2 и приоритет вызывающего космического аппарата 1.
Шаг 3. Компьютер управления работой 14 земной станции 2 формирует ответ на сигнал запроса и отправляет его с малонаправленной антенной системы 12 аппаратуры НЛС 13 на космический аппарат 1.
Действия 5. Получение ответа от ЗС на запрос установления связи.
Шаг 1. МНА 3 бортовой аппаратуры НЛС 4 принимает сигнал ответа и передает его на БКУ БРТК 5 КА 1, который его анализирует и, если сигнал ответа положительный, запускается процедура взаимного наведения остронаправленных оптических антенных систем.
Шаг 2. Если сигнал ответа - отрицательный, КА 1 продолжает процедуры анализа входных пилот-сигналов и выбора подходящей земной станции 2.
Алгоритм установления связи земной станцией 2 с космическим аппаратом 1 с в ВЛС с применением ОНА (то есть когда инициатором установления связи является земная станция) заключается в следующем:
Действие 1. Вызов космического аппарата.
Шаг 1. Компьютер управления работой 14 земной станции 1 по имеющейся в базах данных 11 информации об орбитальном движении определяет, что вызываемый космический аппарат 2 находится в ее зоне радиовидимости (ЗРВ).
Шаг 2. Компьютер управления работой 14 земной станции 1 формирует сигнал вызова космического аппарата 2 и отправляет его с малонаправленной антенной системы 12 аппаратуры НЛС 13 в НЛС на КА 1.
Шаг 3. Космический аппарат 1 принимает сигнал вызова в НЛС на малонаправленную антенную систему 3 бортовой аппаратуры НЛС 4.
Затем, бортовой комплекс управления БРТК 5 космического аппарата запускает процедуру выбора оптимальной земной станции 2 для установления связи, которые были подробно расписаны в предыдущем алгоритме установления связи КА с ЗС и осуществляются действия 1-5, описанные в предыдущем алгоритме.
Примечание: при пропадании связи с земной станцией и при необходимости осуществления эстафетного перехода к другой земной станции осуществляется действия 1-5 описанные в предыдущем алгоритме установления связи КА с ЗС.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВЫСОКОСКОРОСТНОЙ СВЯЗИ С КОСМИЧЕСКИМИ АППАРАТАМИ С ПРИМЕНЕНИЕМ ТЕХНОЛОГИЙ АВТОМАТИЧЕСКОГО ВЗАИМНОГО НАВЕДЕНИЯ ОСТРОНАПРАВЛЕННЫХ АНТЕНН | 2023 |
|
RU2816351C1 |
| Система персональной подвижной спутниковой связи на основе сети низкоорбитальных спутников-ретрансляторов, обеспечивающая предоставление доступа в сеть Internet с носимого персонального абонентского терминала | 2021 |
|
RU2754947C1 |
| Система управления полетом космического аппарата с применением в качестве ретрансляторов низкоорбитальных спутников, связанных между собой межспутниковыми линиями связи | 2019 |
|
RU2713293C1 |
| СПОСОБ МАРШРУТИЗАЦИИ ПОТОКОВ ИНФОРМАЦИИ, КРИТИЧНОЙ К ЗАДЕРЖКАМ, В СЕТИ СПУТНИКОВОЙ СВЯЗИ НА НЕГЕОСТАЦИОНАРНЫХ КОСМИЧЕСКИХ АППАРАТАХ, СВЯЗАННЫХ МЕЖСПУТНИКОВЫМИ ЛИНИЯМИ СВЯЗИ В ОДНОЙ ОРБИТАЛЬНОЙ ПЛОСКОСТИ И РАСПОЛОЖЕННЫХ НА КРУГОВЫХ ОРБИТАХ | 2022 |
|
RU2799503C1 |
| Способ организации связи с объектами, расположенными на орбите и поверхности планеты или спутника планеты, и система дальней космической связи для осуществления данного способа | 2020 |
|
RU2752753C1 |
| СПОСОБ И СИСТЕМА ЗАЩИТЫ ИНФОРМАЦИИ ПРИ ОРГАНИЗАЦИИ ИНФОРМАЦИОННОГО ОБМЕНА С КОСМИЧЕСКИМИ АППАРАТАМИ | 2022 |
|
RU2795117C1 |
| РЕГИОНАЛЬНАЯ СИСТЕМА МОБИЛЬНОЙ СПУТНИКОВОЙ СВЯЗИ И ОБСЛУЖИВАНИЯ ТРАНСПОРТНЫХ КОРИДОРОВ | 2005 |
|
RU2322760C2 |
| Архитектура абонентского терминала сети персональной спутниковой связи | 2017 |
|
RU2661850C1 |
| СПОСОБ ФОРМИРОВАНИЯ НАВИГАЦИОННЫХ РАДИОСИГНАЛОВ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ (НКА) НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ (ГСО) И/ИЛИ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ (НКА) НА ГЕОСИНХРОННОЙ НАКЛОННОЙ ОРБИТЕ (ГСНО) С ПОМОЩЬЮ ЗЕМНЫХ СТАНЦИЙ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2474845C1 |
| Способ управления полетом низкоорбитального космического аппарата через навигационные космические аппараты системы ГЛОНАСС с применением резервного канала передачи с кодовым разделением командно-программной информации | 2022 |
|
RU2800530C1 |
Изобретение относится к обеспечению связи в системах информационного обмена с космическими аппаратами (КА) различного назначения, а именно к способам установления связи КА с земными станциями. Техническим результатом является создание способа автономного установления связи на остронаправленных антенных системах (ОНА) в высокоскоростных линиях связи в диапазонах выше 10 ГГц и в оптическом диапазоне без участия технического персонала центра управления полетом (ЦУП), осуществляющих предварительное планирование сеансов связи и управления (ССУ). Упомянутый технический результат достигается тем, что космический аппарат с целью выбора земной станции для установления связи с ней на ОНА принимает сигналы маяков от разных земных станций на малонаправленную антенную систему (МНА) в радиодиапазоне, сильно подверженном влиянию состояния атмосферы, и по качеству этих сигналов определяет оптимальную земную станцию. 3 з.п. ф-лы, 3 ил.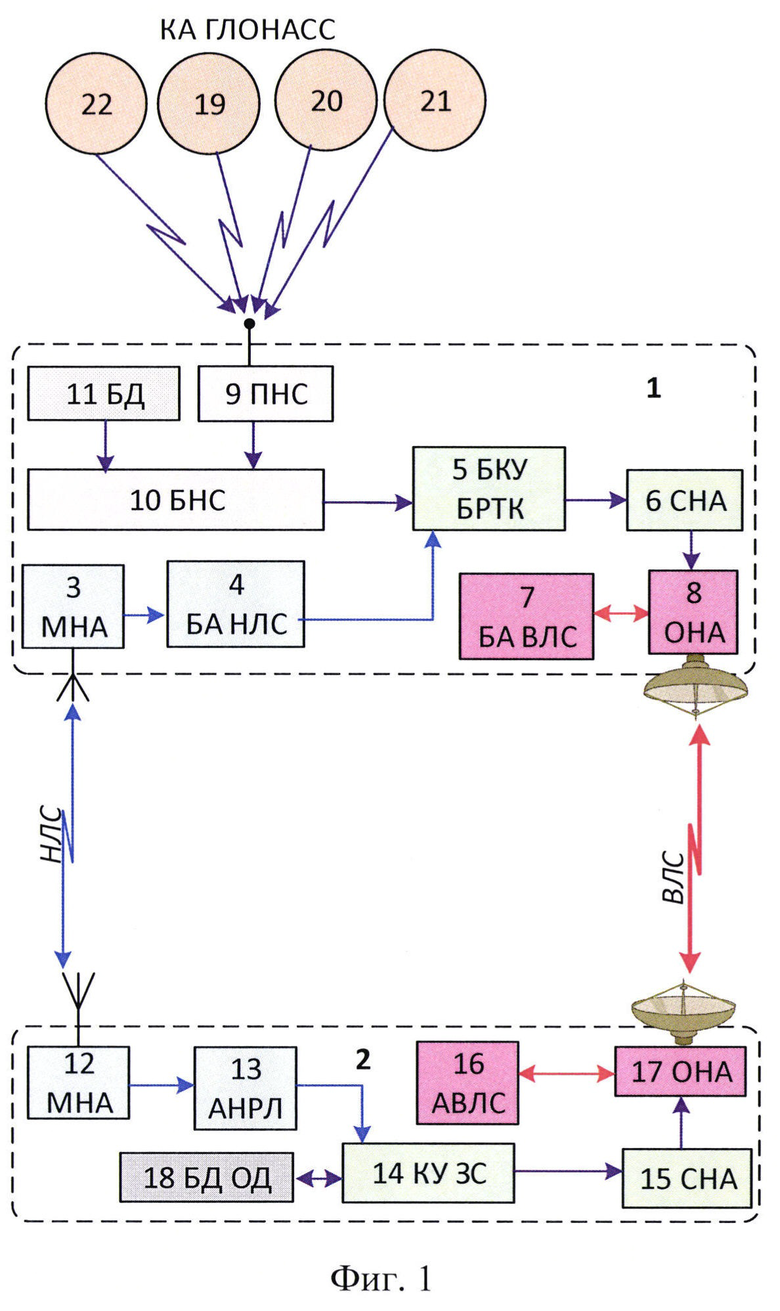
1. Способ выбора космическим аппаратом земной станции для установления высокоскоростной связи на остронаправленные антенные системы в диапазонах, радиопрозрачность которых зависит от состояния атмосферы, включающий установление связи между космическим аппаратом и земной станцией в высокоскоростной линии связи с применением остронаправленных антенн, при котором постоянно вычисляют на основании принимаемых сигналов от навигационных спутников ГЛОНАСС координаты космического аппарата, на основании которых бортовая навигационная система космического аппарата периодически производит расчет параметров прогноза орбитального движения, которые записывают в базу данных бортовой навигационной системы космического аппарата, постоянно осуществляет прием пилот-сигналов в низкоскоростной линии связи на малонаправленную антенну, несущих информацию о номере земной станции, отличающийся тем, что определяют состояния атмосферы над земными станциями следующим образом - бортовая навигационная система космического аппарата на основании значений координат земных станций, записанных в базе данных бортовой навигационной системы космического аппарата, определяет текущие значения расстояния до земной станции, от которой принимает пилот-сигнал, вычисляет текущие значения координат космического аппарата, осуществляет расчет ослабления сигнала на расстояние от земной станции до космического аппарата и расчет допустимого ослабления сигнала в сухой и влажной атмосфере, расчет допустимого ослабления сигнала на распространение с учетом угла радиогоризонта, расчет отношения сигнал/шум в виде отношения энергии бита к спектральной плотности шума на входе приемного устройства, вычисляет значение ослабления во влажной атмосфере реального принятого сигнала от земной станции с учетом угла радиогоризонта, сравнивает расчетное значение ослабления во влажной атмосфере с реальным значением в полученных пилот-сигналах и если реальное значение ослабления во влажной атмосфере превышает расчетное значение, то это характеризует неблагоприятное состояние атмосферы над данной земной станцией, при этом осуществляют выбор наиболее подходящей земной станции для установления связи в высокоскоростной линии связи путем сравнения значений отношения сигнал/шум и ослабления во влажной атмосфере в принятых пилот сигналах от разных земных станций и выбора наиболее подходящей для установления связи в высокоскоростной линии связи, осуществляют этап отправки запроса на установление связи, при котором бортовой ретрансляционный комплекс космического аппарата формирует сигнал запроса на установление связи с выбранной земной станцией, в котором, кроме того, содержится информация о прогнозе орбитального движения космического аппарата, и отправляет его по низкоскоростной линии связи с малонаправленной антенны бортовой аппаратуры, земная станция принимает сигнал запроса от космического аппарата на малонаправленную антенну аппаратуры низкоскоростной линии связи и компьютер управления работой земной станции осуществляет оценку, может ли земная станция войти в связь с вызывающим космическим аппаратом, формирует ответ на сигнал запроса и отправляет его с малонаправленной антенной системы аппаратуры низкоскоростной линии связи на космический аппарат, малонаправленная антенна бортовой аппаратуры принимает сигнал ответа и передает его на бортовой комплекс управления бортового ретрансляционного комплекса, который его анализирует, и, если сигнал ответа положительный, запускают процедуру взаимного наведения остронаправленных оптических антенных систем, если сигнал ответа отрицательный, космический аппарат продолжает процедуры анализа входных пилот-сигналов и выбора подходящей земной станции.
2. Способ выбора космическим аппаратом земной станции для установления высокоскоростной связи по п. 1, отличающийся тем, что если заданным требованиям соответствует несколько земных станций, то из них выбирают станцию, продолжительность сеанса связи с которой максимальная.
3. Способ выбора космическим аппаратом земной станции для установления высокоскоростной связи по п. 2, отличающийся тем, что максимальную продолжительность сеанса связи с земной станцией выбирают на основании значения доплеровского сдвига частоты пилот-сигнала.
4. Способ выбора космическим аппаратом земной станции для установления высокоскоростной связи по п. 3, отличающийся тем, что максимальной продолжительности сеанса связи соответствует максимальное значение доплеровского сдвига частоты пилот-сигнала.
| СПОСОБ АДАПТАЦИИ РЕЖИМОВ ПЕРЕДАЧИ ИНФОРМАЦИИ ПО СПУТНИКОВЫМ КАНАЛАМ СВЯЗИ В УСЛОВИЯХ ВОЗДЕЙСТВИЯ АТМОСФЕРНЫХ ВОЗМУЩЕНИЙ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2015 |
|
RU2611606C1 |
| CN 111077526 A, 28.04.2020 | |||
| T | |||
| Rossi, M | |||
| et al | |||
| "Performance analysis and optimization of site diversity techniques for EHF satellite links", 2011 Aerospace Conference, Big Sky, MT, USA, 2011, сс | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЕР 3355486 А1, 01.08.2018 | |||
| US 9485010 B1, 01.11.2016 | |||
| Способ зондирования ионосферы и тропосферы | 2018 |
|
RU2693842C1 |

