Изобретение относится к системам связи и может быть использовано для расширения зоны обслуживания в районах, где отсутствует или наблюдается неустойчивый прием радиотелевизионного сигнала СВЧ.
Причиной этого является рельеф местности: прямому прохождению сигнала от источника сигнала до точки приема препятствует наличие холма или горной преграды, или точка приема расположена в ложбине. В таких случаях используют специальные линии СВЧ-связи и ретрансляторы. Источником радиотелевизионного сигнала может быть наземный источник или космический аппарат (КА).
Известны способы наведения антенн космических аппаратов, в которых используют технические средства систем ориентации и навигации КА (Бартенев В.А., Болотов Г.В., Быков В.Л. и др. Под редакцией Кантора Л.А. Спутниковая связь и вещание. - М.: Радио и связь, 1997, с.334-349). При этом точность наведения антенны на заданную точку на поверхности Земли определяется погрешностями угловой стабилизации КА, ошибками установки антенны на посадочные поверхности КА относительно системы координат, связанной с КА, погрешностями системы координат КА относительно системы координат, связанной с Землей, погрешностями при изготовлении антенны. Точность наведения таких антенн невелика (на уровне 30-60 угловых минут).
Недостатками такого способа наведения антенн являются относительно невысокая точность, обусловленная, прежде всего, техническими характеристиками КА, а также отсутствие достаточно точной автономной системы наведения антенны.
В наземных станциях спутниковой связи, которые обычно представляют собой приемо-передающие радиостанции с одной общей антенной (на прием и на передачу), для наведения антенны используются способы наведения, в которых проводят режим программного наведения в заданную точку пространства, а также режим точного наведения по принимаемому сигналу, в который переходят с помощью поиска и захвата сигнала (Покрас A.M., Сомов А.М, Цуриков Г.Г. Антенны земных станций спутниковой связи. - М.: Радио и связь, 1985, с.35-76).
В режиме точного наведения по принимаемому сигналу могут использоваться различные методы наведения по принимаемому сигналу, метод экстремального наведения, моноимпульсный метод и др.
Недостатком данных способов является трудность реализации точного программного наведения антенны, что связано с необходимостью использования достаточно сложных точных измерительных средств.
Прототипом изобретения является способ наведения антенны станции спутниковой связи, содержащей параболическую зеркальную антенну с СВЧ-блоком и блоками азимутальной и угломестной осей, блок наведения антенны, вычислительное устройство, снабженное программами, включая программы наведения антенны (Фролов О.П. Антенны для земных станций спутниковой связи. - М.: Радио и связь, 2000, с.260-265).
В данном способе осуществляют режим программного наведения антенны по углу места и азимуту в заданную точку пространства, а также режим точного наведения антенны на источник сигнала с использованием автосопровождения (т.е. работы по принимаемому сигналу), реализованного посредством метода экстремального наведения. Режим точного наведения антенны осуществляют путем перехода из режима программного наведения с использованием поиска и захвата сигнала. Точное наведение антенны на источник сигнала также производят при постоянном программном наведении антенны по корректируемым углу места и азимуту, с периодическим включением автосопровождения для уточнения угла места и азимута источника сигнала.
Программное наведение антенны по углу места и азимуту производят путем разворота антенны на рассчитанные в вычислительном устройстве углы от базовых измерительных плоскостей:
- плоскости горизонта - для угла места;
- плоскости меридиана - для азимута.
Недостатком данного способа наведения антенны является относительно невысокая точность программного наведения. Это обусловлено, в первую очередь, ошибкой определения меридиана.
Для остронаправленных антенн (ширина диаграммы направленности менее 30-40 угловых минут) задача точного программного наведения передающей антенны на абонентскую станцию, а также сохранения этого направления при эксплуатации является одной из наиболее сложных. В данных устройствах из-за отсутствия приемного канала не может быть использована обратная связь по сигналу для повышения точности наведения антенны, как это делается в приемо-передающих станциях.
Для стационарных ретрансляторов, размещаемых на жестком основании, достаточно решить задачу точного начального наведения передающей антенны, которое может рассматриваться как разовая операция с использованием высокоточной и дорогостоящей дополнительной аппаратуры, не входящей в состав ретранслятора.
Отклонение основания ретранслятора от горизонтальной плоскости (ошибка негоризонтальности) может быть определена с помощью устройства местной вертикали, например, маятникового типа.
Для определения меридиана могут быть использованы астрономические измерительные средства или высокоточный радиокомпас.
Более сложной данная задача является для мобильных ретрансляторов, размещаемых, например, в кузове автомобиля или на временной площадке.
К ошибкам начального наведения передающей антенны на абонентскую станцию в этом случае добавляются угловые погрешности, обусловленные сезонными перемещениями грунта. Эти ошибки могут достигать 30-60 угловых минут. Кроме того, возможны суточные угловые ошибки при нежестком насыщенном влагой грунте. В этих ретрансляторах местная вертикаль и меридиан должны определяться постоянно. Поэтому должна использоваться встроенная измерительная аппаратура.
Отклонение азимутальной оси ретранслятора от местной вертикали в данном случае может быть определено с требуемой точностью с помощью датчиков углов, например, маятникового типа.
Более сложная задача - точное определение меридиана. Имеющие наибольшую точность астросредства не могут быть использованы из-за необходимости обеспечения постоянной всепогодной работы. Радиокомпас с приемлемыми размерами (измерительной базой 4-6 метров) имеет точность (по уровню 3σ) 10-15 угловых минут. Этого недостаточно для анализируемых ретрансляторов.
Технической задачей изобретения является повышение точности наведения передающей антенны ретранслятора, а также исключение использования дополнительной аппаратуры для наведения передающей антенны при эксплуатации и, соответственно, упрощение и снижение стоимости аппаратуры.
Эта задача решена так, что в способе наведения антенн ретранслятора производят наведение приемной антенны ретранслятора на источник сигнала, причем при наведении проводят разворот приемной антенны по азимуту и углу места до захвата сигнала, а затем точное наведение приемной антенны по азимуту и углу места с использованием программного наведения и операции автосопровождения с коррекцией по принимаемому сигналу, а также производят программное наведение передающей антенны ретранслятора па абонентскую станцию на рассчитанные азимут и угол места, при этом вводят режим начального наведения ретранслятора, в этом режиме перед наведением приемной антенны на источник сигнала ее устанавливают по азимуту на угол, отличающийся на девяносто градусов от направления на источник сигнала, и измеряют угол основания ретранслятора относительно плоскости горизонта с помощью датчика угла, установленного на азимутальной оси приемной антенны, после этого производят разворот приемной антенны сначала по углу места на расчетный угол источника сигнала, с учетом измеренного угла основания ретранслятора, а затем разворот по азимуту до захвата сигнала, после чего в режиме точного наведения приемной антенны на источник сигнала после проведения операции автосопровождения уточняют азимут и угол места источника сигнала, а также в этом режиме с помощью датчика угла измеряют угол основания ретранслятора относительно плоскости горизонта, найденные в режиме точного наведения приемной антенны углы вводят в вычислительное устройство и используют как начальные значения при последующей операции коррекции программных азимута и угла места абонентской станции в режиме передачи информации ретранслятора, при этом также азимут источника сигнала и угол основания ретранслятора используют для нахождения программного азимута абонентской станции в режиме начального наведения ретранслятора, после этого приемную антенну устанавливают по азимуту сначала на угол, отличающийся от азимута абонентской станции на девяносто градусов, а затем приемную антенну устанавливают на угол, соответствующий азимуту абонентской станции, в обоих положениях измеряют с помощью датчика угла угол основания ретранслятора относительно плоскости горизонта, данные измерения используют для определения поправок величин азимута и угла места абонентской станции, после чего приемную антенну наводят по азимуту на источник сигнала и осуществляют программное наведение в режиме точного наведения, а передающую антенну наводят по рассчитанным азимуту и углу места с учетом найденных поправок на абонентскую станцию, затем в режиме передачи информации ретранслятора циклически после каждой операции автосопровождения приемной антенны в вычислительное устройство вводят текущие значения трех параметров: азимута и угла места приемной антенны, а также угла разворота приемной антенны, определяемого с помощью датчика угла, после этого находят разности текущих и начальных значений указанных параметров, производят определение уходов основания ретранслятора по результатам измерения указанных трех параметров и находят поправки к программным значениям азимута и угла места абонентской станции, найденные поправки обоих углов сравнивают с допустимыми отклонениями, после чего при превышении одной или обеими поправками допустимого отклонения проводят коррекцию программного значения того угла абонентской станции, отклонение которого от программной величины превышает допустимое значение, одновременно с этим для данного угла абонентской станции производят коррекцию начальных значений углов разворота основания ретранслятора, а также начального значения поправки к программному значению этого угла, затем осуществляют программное наведение передающей антенны на абонентскую станцию по скорректированным углам.
Способ реализуется в ретрансляторе благодаря использованию дополнительного датчика угла, установленного на азимутальной оси приемной антенны, а также проведению дополнительных операций при наведении передающей и приемной антенн. Эти операции проводят в режиме начального наведения ретранслятора и в режиме передачи информации.
В качестве примера рассматриваем ретранслятор, в котором как приемная, так и передающая антенна представляет собой остронаправленную параболическую зеркальную антенну с шириной диаграммы направленности - φДН, равной 30 угловым минутам.
Для частот от 6 до 12 ГГц диаметр такой антенны должен быть от 7 до 3,5 метра.
Достаточно высокой считается точность наведения антенны с потерями по мощности 0,5 дб, что соответствует погрешности наведения рассматриваемой антенны ±6 угловых минут, т.е. ±0,2 φДН.
Способ иллюстрируется фиг.1-4, на которых приведены: на фиг.1 - функциональная схема ретранслятора, на фиг.2 - блок-схема операций режима начального наведения приемной и передающей антенн ретранслятора, на фиг.3а, б, в, г, д - погрешности наведения антенны по углу места и азимуту из-за ее разворота вокруг оптической оси, на фиг.4 - блок-схема программы коррекции программных азимута и угла места абонентской станции.
Ретранслятор, изображенный на фиг.1, содержит приемную антенну 1, на которой установлен СВЧ-блок 2 приемной антенны, соединенный с размещенным на передающей антенне 3 СВЧ-блоком 4 передающей антенны. СВЧ-блок 2 и СВЧ-блок 4 предназначены для усиления, фильтрации и преобразования частоты ретранслируемого СВЧ-сигнала. Второй выход СВЧ-блока 2 приемной антенны соединен с блоком 5 наведения приемной антенны, предназначенным для преобразования СВЧ-сигнала в сигнал, используемый для точного наведения приемной антенны 1. Для управления по азимутальной оси 6 приемной антенны ретранслятор содержит блок 7 азимутальной оси приемной антенны, а для управления по угломестной оси 8 приемной антенны - блок 9 угломестной оси приемной антенны. На азимутальной оси приемной антенны установлен датчик 10 угла, например, маятникового типа, используемый для измерения погрешности выставки ретранслятора относительно плоскости горизонта.
Для управления по азимутальной оси 11 передающей антенны ретранслятор содержит блок 12 азимутальной оси передающей антенны, а для управления по угломестной оси 13 передающей антенны - блок 14 угломестной оси передающей антенны.
В состав блоков 7 и 9 приемной антенны и блоков 12 и 14 передающей антенны входят датчики углов с устройствами обработки сигналов, а также приводы, обеспечивающие повороты осей.
Ретранслятор содержит также вычислительное устройство 15, предназначенное для управления приемной антенной 1 и передающей антенной 3 и соединенное с блоком 5, датчиком 10 угла, а также с блоками 7, 9, 12 и 14.
Приемная антенна 1 ретранслятора предназначена для усиления принимаемого радиотелевизионного сигнала 16, приходящего от источника сигнала, а передающая антенна 3 - для усиления излучаемого радиотелевизионного сигнала 17, поступающего от ретранслятора на абонентскую станцию.
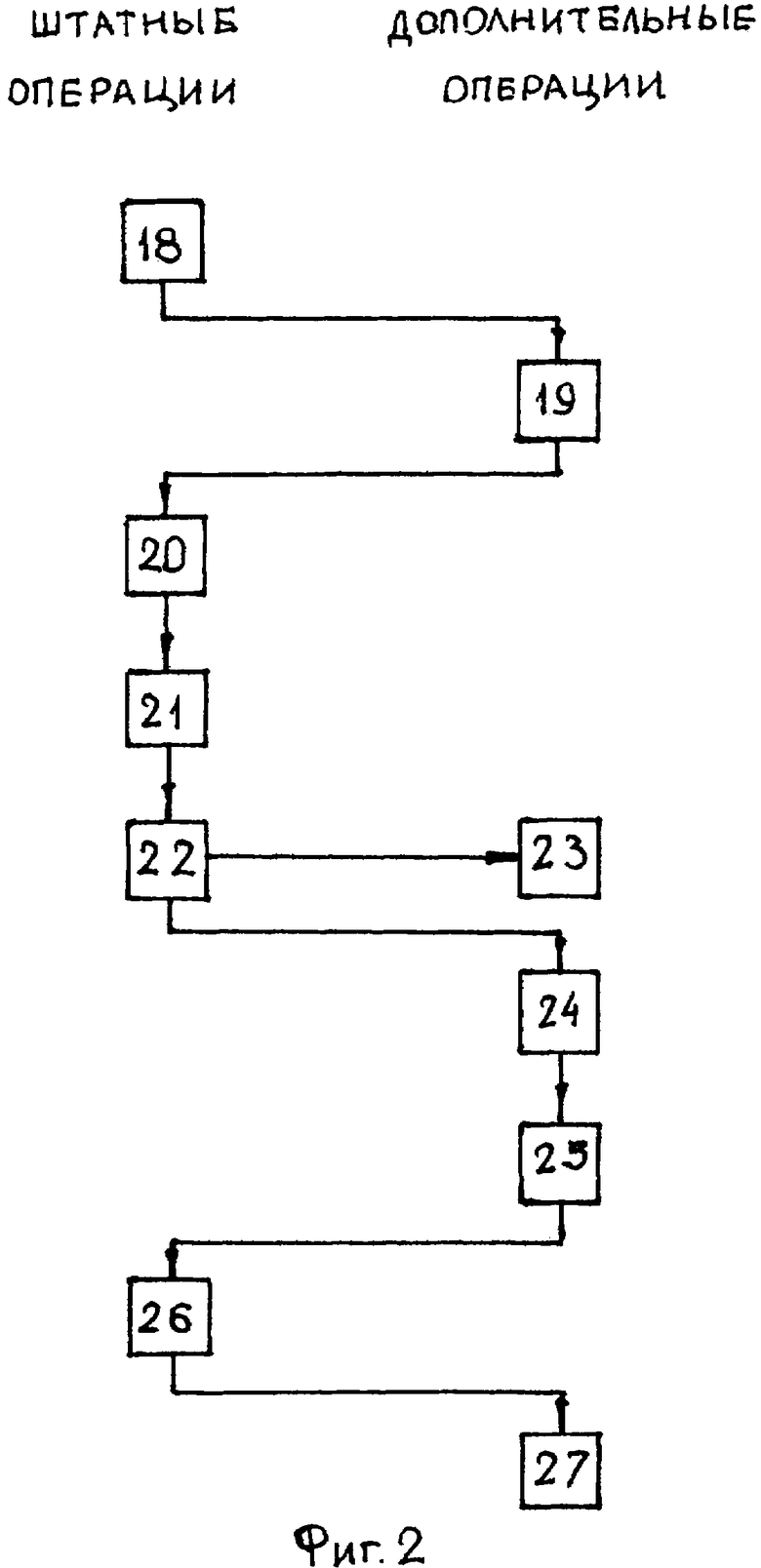
На фиг.2 изображены операции:
18 - приведение приемной и передающей антенн в начальное положение по азимуту и углу места и стабилизация их в этом положении;
19 - установка приемной антенны по азимуту на угол, отличающийся на 90 градусов от направления на источник сигнала, измерение и введение в вычислительное устройство ΔГП1;
20 - разворот приемной антенны в положение (Аз=Азик, УМ=УМпи);
21 - поиск источника сигнала;
22 - точное наведение приемной антенны на источник сигнала;
23 - измерение и введение в вычислительное устройство ΔГП2;
24 - установка приемной антенны по азимуту на угол, отличающийся на 90 градусов от направления на абонентскую станцию, измерение и введение в вычислительное устройство ΔГП3;
25 - разворот приемной антенны по азимуту на абонентскую станцию, измерение и введение в вычислительное устройство ΔГП4;
26 - разворот приемной антенны по азимуту в положение (Аз=Азпи, УМ=УМпи) и точное наведение приемной антенны на источник сигнала;
27 - наведение передающей антенны по скорректированным азимуту и углу места на абонентскую станцию.
Здесь использованы обозначения:
Аз - азимут;
УМ - угол места;
ΔГП1, ΔГП2, ΔГП3, ΔГП4 - погрешность ретранслятора относительно плоскости горизонта (погрешность негоризонтальности);
Азик - начальный азимут источника сигнала, определенный с помощью компаса;
УМпи - программный угол места источника сигнала;
Азпи - программный азимут источника сигнала.
На фиг.2 показаны известные штатные операции наведения приемной и передающей антенн ретранслятора, а также новые дополнительные операции, использование которых позволило обеспечить получение указанного технического результата.
Блок-схема отражает последовательность операций и их взаимосвязь.
Взаимная привязка азимутальных и угломестных систем обеих антенн 1 и 3 (фиг.1) производится при изготовлении ретранслятора. Погрешность установки ретранслятора на посадочную плоскость относительно горизонтальной плоскости измеряется и компенсируется благодаря использованию датчика 10 угла. Используемая обычно начальная выставка основания ретранслятора параллельно горизонтальной плоскости (горизонтирование) с помощью прокладок и шайб в рассматриваемом случае нецелесообразна. Это связано с нарушением горизонтирования из-за уходов грунта. Начальная привязка азимутальной системы ретранслятора к меридиану производится с помощью простого относительно грубого магнитного компаса или радиокомпаса, имеющих погрешность от 0,5 до 3 градусов. Поскольку компас используется только при начальном наведении, он может не входить в состав аппаратуры ретранслятора.
Способ повышения точности наведения передающей антенны ретранслятора реализуется следующим образом.
После подачи на ретранслятор питания по программе вычислительного устройства 15 (фиг.1) осуществляют штатную операцию (фиг.2): 18 - приведение приемной и передающей антенн 1 и 3 (фиг.1) в начальное положение по азимуту (Аз=0) и углу места (УМ=0) и стабилизация их в этом положении.
Управление антеннами осуществляют с помощью вычислительного устройства 15 (фиг.1).
Для программного разворота по азимуту приемной антенны 1 по сигналам вычислительного устройства 15 используют привод, размещенный в блоке 7 азимутальной оси приемной антенны. Разворот производят вокруг азимутальной оси 6.
С помощью привода, размещенного в блоке 9 угломестной оси приемной антенны, осуществляют разворот вокруг угломестной оси 8. Развороты передающей антенны 3 производят с помощью привода, размещенного в блоке 12 азимутальной оси передающей антенны, вокруг азимутальной оси 11, а также привода, размещенного в блоке 14 угломестной оси передающей антенны, вокруг угломестной оси 13.
Скорость разворота рассматриваемых антенн 1 и 3 составляет от несколько градусов до тридцати градусов в секунду. Время стабилизации антенн 1 и 3 определяется динамическими характеристиками контура управления. Минимальное требуемое время не превышает 1 секунды.
Затем с помощью блока 7 и вычислительного устройства 15 проводят дополнительную операцию 19 (фиг.2), которая включает разворот приемной антенны 1 (фиг.1) по азимуту и установку ее на угол, отличающийся на 90 градусов относительно направления на источник сигнала, стабилизацию приемной антенны 1 в этом положении, а также измерение и введение в вычислительное устройство 15 погрешности негоризонтальности ΔГП1. Измерение осуществляют с помощью датчика 10 угла. Ось чувствительности датчика 10 угла при изготовлении ретранслятора привязывается к системе координат ретранслятора, и для обеспечения максимальной чувствительности ее устанавливают перпендикулярно угломестной оси и азимутальной оси приемной антенны 1.
Измерение погрешности негоризонтальности ретранслятора ΔГП1 позволяет упростить операцию поиска источника сигнала. При этом ошибка программного наведения приемной антенны 1 на источник сигнала по углу места не превышает половины ширины диаграммы направленности антенны. Поэтому при поиске может быть использовано однострочное азимутальное сканирование.
В изобретении в качестве физически реализуемого точного азимутального базового направления предлагается использование направления оптической оси приемной антенны 1 на источник сигнала (наземный или КА). При этом направление меридиана, которое используется в программе наведения передающей антенны 3, находят расчетным путем. Угол ψи между меридианом и направлением на источник сигнала и угол ψс между меридианом и направлением на абонентскую станцию находят по известным координатам (широте и долготе) источника сигнала, абонентской станции и ретранслятора. Если источником сигнала является КА, то берут координаты подспутниковой точки - пересечения поверхности Земли и отрезка прямой линии между центром Земли и КА.
При наведении приемной антенны 1 на источник сигнала определяют азимутальный угол (азимут) Ази. Требуемый для программного азимутального наведения передающей антенны 3 на абонентскую станцию азимутальный угол Азс находят из формулы

После операции 19 (фиг.2) проводят штатную операцию 20 - разворот приемной антенны 1 (фиг.1) в положение Аз=Азик, УМ=УМпи и стабилизация ее в этом положении. Управление приемной антенной 1 осуществляют с помощью вычислительного устройства 15 и блоков 7 и 9.
Азимут Аз=Азик соответствует начальному азимуту источника сигнала, определенному с помощью компаса.
Угол места УМ=УМпи соответствует программному углу места источника сигнала, который находят из формулы

где УМри - расчетный угол места источника сигнала относительно горизонтальной плоскости, найденный для известного расположения источника сигнала и ретранслятора.
Затем проводят штатную операцию (фиг.2) 21 - поиск источника сигнала. При поиске источника сигнала перемещение приемной антенны 1 (фиг.1) производят только по азимуту с помощью вычислительного устройства 15 и блока 7.
Принимаемый радиотелевизионный сигнал 16 от источника сигнала обнаруживают с помощью приемной антенны 1. В СВЧ-блоке 2 осуществляют преобразование СВЧ-сигнала: фильтрацию, усиление, изменение частоты. После преобразования сигнал подают на блок 5 наведения приемной антенны. С помощью этого сигнала реализуют контур наведения приемной антенны 1 по принимаемому сигналу.
Захват сигнала фиксируют с помощью блока 5 по превышению принимаемым сигналом уровня от 0,5 до 0,7 от максимальной величины сигнала.
После захвата сигнала осуществляют штатную операцию (фиг.2) 22 - точное наведение приемной антенны на источник сигнала по азимуту и углу места с помощью автосопровождения, например, с применением известного метода экстремального наведения. Время данной операции зависит от требуемой точности наведения и может составлять от нескольких единиц до нескольких десятков секунд.
Операцию 22 осуществляют с помощью вычислительного устройства 15 и блоков 5, 7 и 9 (фиг.1).
При точном наведении приемной антенны 1 на источник сигнала с помощью известной операции - автосопровождения - осуществляют уточнение программных азимута и угла места источника сигнала. Эти уточненные углы измеряют азимутальным и угломестным датчиками угла приемной антенны 1 и вводят в вычислительное устройство 15. Уточненные значения этих углов используют в известной штатной операции точного наведения приемной антенны 1 при ее программном наведении на источник сигнала до следующей операции автосопровождения. Их также используют как начальные значения при проведении новой операции - коррекции программных азимута и угла места абонентской станции в режиме передачи информации.
В этой же новой операции в качестве начального значения используют результаты измерений датчика 10 угла, которые вводят в вычислительное устройство 15 одновременно с уточненными величинами азимута и угла места приемной антенны 1. Данные измерения производят в режиме точного наведения приемной антенны 1 на источник сигнала при проведении дополнительной операции (фиг.2) 23 - измерение с помощью датчика 10 (фиг.1) угла и введение в вычислительное устройство 15 погрешности негоризонтельности ΔГП2.
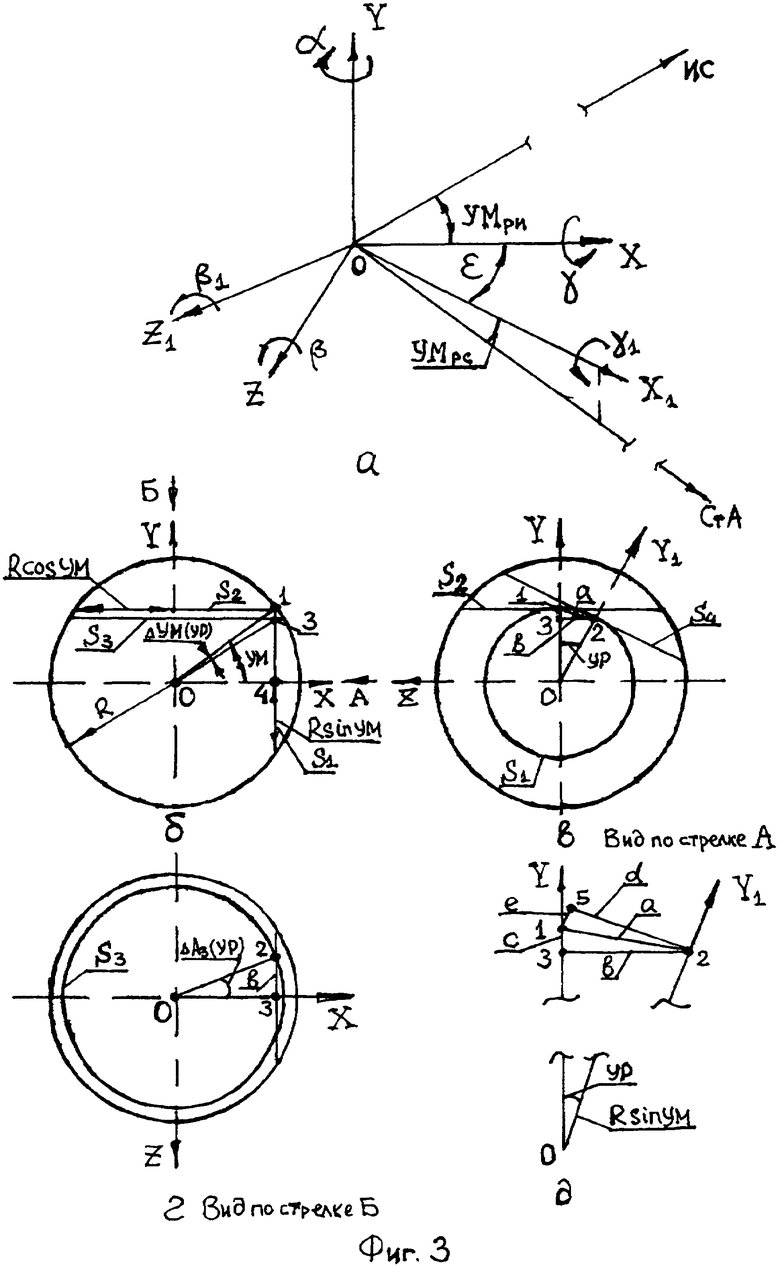
На фиг.3а показана ортогональная 3-осная система координат, в которой плоскость X0Z совпадает с горизонтальной плоскостью, источник сигнала (ИС) расположен в плоскости X0Y, абонентская станция (СТА) по азимуту развернута относительно источника сигнала на угол ε. Углы УМри и УМрс - расчетные углы места источника сигнала и абонентской станции относительно горизонтальной плоскости. Углы α, β, γ - углы разворота основания соответственно вокруг осей Y, Z и X. Углы β1 и γ1 - углы разворота основания соответственно вокруг осей Z1 и Х1. Положительное направление разворота - против часовой стрелки. Погрешность ΔГП1 соответствует повороту вокруг оси Z, ΔГП2 - вокруг оси X. Погрешность ΔГП2 представляет собой угол разворота (УР) приемной антенны 1 вокруг ее оптической оси относительно вертикали. Погрешность негоризонтельности ΔГП2 основания ретранслятора приводит к дополнительным ошибкам наведения приемной антенны 1 по азимуту ΔАз (УР) и углу места ΔУМ (УР). Приемная антенна 1 должна быть дополнительно развернута на эти углы (по азимуту и углу места) для того, чтобы обеспечить точное наведение на источник сигнала с учетом данной погрешности основания ретранслятора.
На фиг.3б, в, г, д показаны диаграммы возникновения и компенсации указанных ошибок приемной антенны 1 (фиг.1) ΔАз (УР) и ΔУМ (УР).
На фиг.3б, в, г показаны три проекции условной сферы с радиусом R, центр и оси которой совпадают с центром и осями системы координат XYZ (фиг.3а).
На этих проекциях изображены:
УМ - угол места приемной антенны 1 (фиг.1);
УР - угол разворота основания ретранслятора вокруг оси Х (для наглядности этот угол показан больше реальной величины, которая не превышает 30-60 угловых минут);
S1 - сечение сферы, перпендикулярное оси X;
S2 и S3 - сечения сферы, перпендикулярные оси Y;
S4 - сечение сферы, перпендикулярное оси Y1, которая повернута в плоскости XOY относительно оси Y на угол УР;
RsinУМ - радиус сечения S1;
RcosУМ - радиус сечений S2 и S4;
01 - отрезок, соответствующий направлению оптической оси приемной антенны 1 на источник сигнала при УР=0;
02 - отрезок, соответствующий направлению оптической оси приемной антенны 1 при наличии погрешности УР;
а - отрезок, соединяющий точки 1 и 2 и соответствующий перемещению оптической оси приемной антенны 1 при повороте основания ретранслятора на угол УР;
b - длина отрезка 23 в сечении S1, соответствующего перемещению оптической оси приемной антенны 1 по азимуту при повороте основания ретранслятора на угол УР;
с - длина отрезка 13 в сечении S1, соответствующего перемещению оптической оси приемной антенны 1 по углу места при повороте основания ретранслятора на угол УР.
На фиг.3д показаны точки 1, 2, 3 перемещения оптической оси приемной антенны 1 (фиг.1) в сечении S1 при повороте ретранслятора на угол УР.
Из прямоугольного треугольника 032 (фиг.3д) находят b - длину отрезка 23

В сечении S3 (фиг.3б и 3г) радиус сечения равен Rсоs[УМ-ΔУМ(УР)].
Из треугольника 032 в сечении S3 (фиг.3г) также определяют b - длину отрезка 23

Учитывая, что УР=ΔГП2 и углы ΔГП2, ΔАз(УР), ΔУМ(УР) малы (менее 60 угловых минут), заменяют sin ΔАз(УР) на ΔАз(УР) и sinYP на ΔГП2. При этом из выражений (3) и (4) находят погрешность по азимуту

Погрешность по углу места находят из прямоугольного треугольника 043 (фиг.3б), в котором

Длину отрезка 13 определяют из прямоугольного треугольника 231 (фиг.3д)

Из формул (3), (6) и (7), с учетом условий, принятых при получении формулы (5), дополнительно включая замену tg (УР/2) на ΔГП2/2, соsΔУМ(УР) на 1 и cos[УМ-ΔУМ(УР)] на cosУМ, находят погрешность по углу места

Для того, чтобы вернуть оптическую ось приемной антенны 1 (фиг.1) из точки 2 в точку 1 (фиг.3в), необходимо осуществить азимутальный разворот приемной антенны 1 (фиг.1) вокруг оси Y1 (в сечении S4), а также поворот по углу места.
Используя проекции секущих дуг, отражающих движение оптической оси приемной антенны, на сечение S1 (фиг.3д), получают отрезок 25 длиной d, соответствующий азимутальному развороту, и отрезок 51 длиной е, соответствующий повороту по углу места приемной антенны 1 (фиг.1).
Для малых углов ΔАз(УР) (не более 40 угловых минут) и ΔУМ(УР) (не более 0,4 угловых минут) погрешность этих преобразований (косинусная ошибка) ничтожно мала (менее 10-4).
Прямоугольные треугольники 231 и 251 (фиг.3д) равны, поскольку угол 321 равен углу 521.
В треугольнике 102 угол 120 равен (90°-УР/2), в треугольнике 230 угол 320 равен (90°-УР), откуда определяют величину угла 321 - УР/2.
Угол 025 прямой, поэтому угол 521 равен УР/2.
Таким образом, получают d=b и е=с.
Следовательно, углы разворотов приемной антенны 1 (фиг.1) по азимуту и углу места для компенсации угла разворота основания ретранслятора УР находят соответственно из полученных формул (5) и (8).
Для наиболее распространенных значений угла места источника сигнала от 12 до 35 градусов погрешность ΔАз(УР) составляет от 0,2 ΔГП2 до 0,7 ΔГП2. Если, например, ΔГП2=20 угловых минут, то ΔАз(УР) может быть от 4 до 14 угловых минут. Поскольку величина ΔГП2 не превышает 30-60 угловых минут (0,01-0,02 радиан), то в соответствии с формулой (8) погрешность ΔУМ(УР) в 100-200 раз меньше ΔАз(УР) и может не учитываться. Для оценки поправки ΔАз(УР) приемной антенны 1 (фиг.1) находят угол места из формулы (2) и из формулы (5) получают

Найденную из выражения (9) поправку ΔАз(УР) используют при определении программного азимута абонентской станции.
Затем проводят дополнительную операцию 24 (фиг.2) - приемную антенну 1 (фиг.1) разворачивают по азимуту и устанавливают на угол, отличающийся на 90 градусов от направления на абонентскую станцию. Угол места приемной антенны 1 при этом не меняется.
С помощью датчика 10 угла измеряют и вводят в вычислительное устройство 15 погрешность ретранслятора ΔГП3 относительно плоскости горизонта. Эта погрешность является поправкой по углу места абонентской станции.
После этого проводят дополнительную операцию 25 (фиг.2) - приемную антенну 1 (фиг.1) разворачивают по азимуту и устанавливают на азимут абонентской станции, измеряют с помощью датчика 10 угла и вводят в вычислительное устройство 15 погрешность ретранслятора ДГП4 относительно плоскости горизонта.
Погрешности ΔГП3 и ΔГП4 могут быть определены расчетным путем по найденным значениям ΔГП1 и ΔГП2. Непосредственное измерение ΔГП3 и ΔГП4 позволяет уменьшить ошибки определения этих погрешностей с 2-3 угловых минут до 0,25-0,5 угловых минут благодаря учету изгибов основания ретранслятора, возникающих при креплении основания к посадочным площадкам, высота которых может отличаться. Влияние изгибов возрастает при значительных размерах антенн (диаметр до 7 метров) и основания (длина до 8,5-9,5 метров). Наибольший эффект эти операции дают при нахождении программного угла места абонентской станции.
Погрешность ΔГП4 характеризует разворот передающей антенны 3 вокруг оптической оси относительно вертикали. Она приводит к дополнительным ошибкам по азимуту и углу места, которые находят с помощью формул (5) и (8) с заменой ΔГП2 на ΔГП4. Причем данная ошибка по углу места, как отмечалось, мала и может не учитываться.
Программный угол места абонентской станции рассчитывают в вычислительном устройстве 15 в соответствии с формулой

где УМрс - расчетный угол места абонентской станции относительно горизонтальной плоскости.
Программный азимут абонентской станции, в соответствии с формулой (1), рассчитывают в вычислительном устройстве 15 по формуле

Величину Ази, как указывалось, находят в режиме точного наведения приемной антенны на источник сигнала, поправку ΔАзи(УР) определяют в соответствии с формулой (9). Поправку ΔАзс(УР) с учетом формул (5) и (10) находят из следующей формулы

Рассчитанные для абонентской станции угол места УМс и азимут Азс вводят в память вычислительного устройства 15 и используют для программного наведения передающей антенны 3 на абонентскую станцию.
Затем проводят штатную операцию 26 (фиг.2) - разворот приемной антенны 1 (фиг.1) по азимуту на источник сигнала и обеспечение режима точного наведения приемной антенны 1. При этом точное наведение реализуют как программное наведение на источник сигнала по азимуту и углу места, уточненным в результате автосопровождения, проведенного при выполнении операции 22 (фиг.2).
После этого проводят дополнительную операцию 27 (фиг.2) - наводят передающую антенну 3 (фиг.1) на абонентскую станцию по азимуту и углу места, рассчитанным соответственно по формулам (11) и (10).
Управление передающей антенной осуществляют в режиме программного наведения на абонентскую станцию.
Операции начального наведения приемной и передающей антенн 1 и 3 ретранслятора завершают и переходят к режиму передачи информации абонентской станции от источника сигнала. В этом режиме осуществляют программное наведение приемной антенны 1 на источник сигнала с периодической коррекцией по принимаемому сигналу (операция автосопровождения). В частности, для коррекции может быть использован метод экстремального наведения, получивший широкое распространение. Также в этом режиме проводят программное наведение передающей антенны 3 на абонентскую станцию.
В изобретении для режима передачи информации ретранслятора решают задачу повышения точности наведения передающей антенны 3 на абонентскую станцию благодаря компенсации угловых погрешностей, вызванных сезонными и суточными перемещениями грунта.
Требуемую точность наведения приемной антенны 1 на источник сигнала при этом обеспечивают за счет использования известного метода - периодической коррекции по сигналу (автосопровождения). В рассматриваемом примере используют известный метод экстремального наведения.
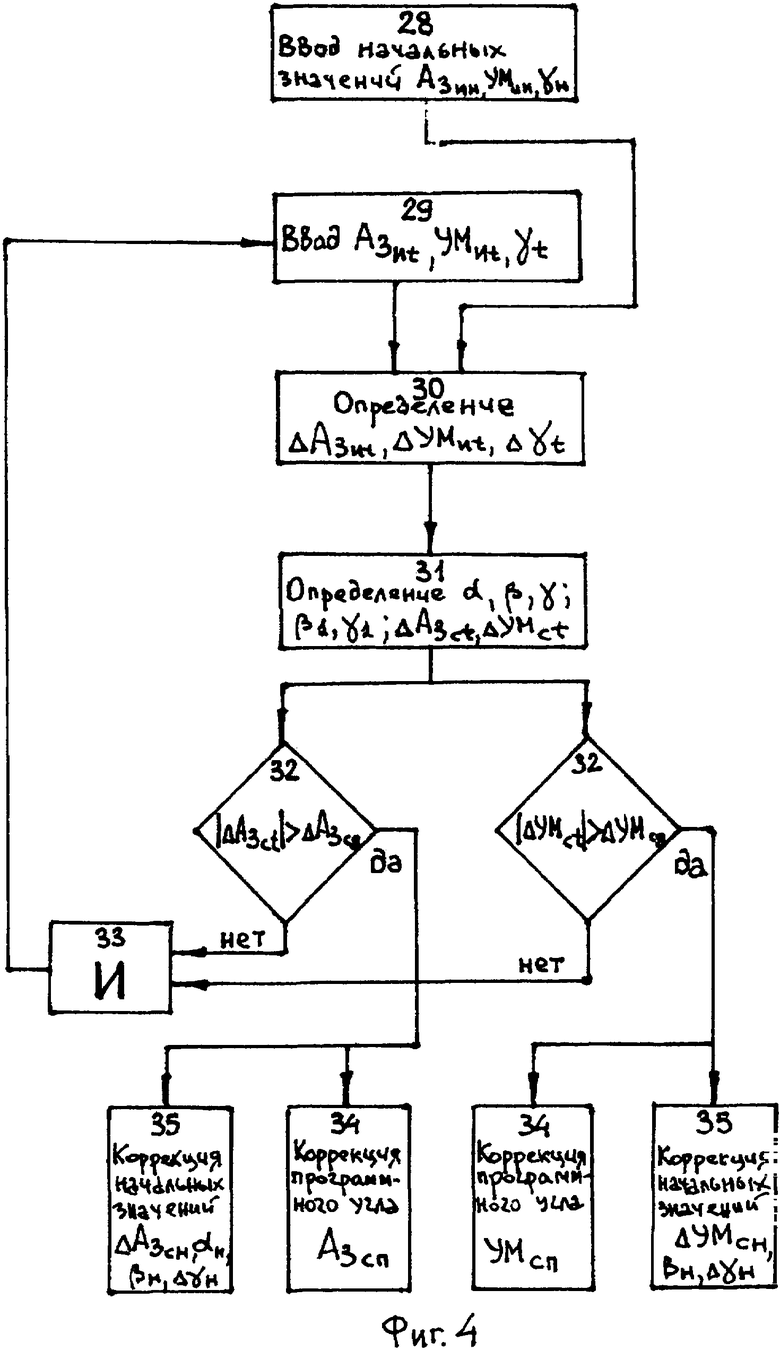
На фиг.4 приведена блок-схема программы новой операции - коррекции программных азимута и угла места абонентской станции.
Эта операция включает измерение и ввод в вычислительное устройство 15 (фиг.1) следующих параметров:
Азин - начальное значение азимута источника сигнала;
Азиt - текущее значение азимута источника сигнала;
УМин - начальное значение угла места источника сигнала;
УМиt - текущее значение угла места источника сигнала;
γн - начальное значение угла поворота основания ретранслятора относительно вертикали;
γt - текущее значение угла поворота основания ретранслятора относительно вертикали.
Эта операция также включает операции, производимые в вычислительном устройстве 15, которые отражены на фиг.4, и перемещение передающей антенны 3 (фиг.1) по результатам коррекции программных значений азимута и угла места абонентской станции.
Первую операцию коррекции программных азимута и угла места абонентской станции начинают осуществлять после проведения второй операции автосопровождения при точном наведении приемной антенны 1 на источник сигнала. Эта операция автосопровождения является первой для режима передачи информации ретранслятора.
В блок-схеме программы, приведенной на фиг.4, в качестве начальной операции (фиг.4, операция 28) осуществляют ввод начальных значений углов Азин, УМин и γн в вычислительное устройство 15 (фиг.1). Эти значения были найдены и введены в вычислительное устройство 15 при проведении операций 22 и 23 (фиг.2).
Уточненные после проведения автосопровождения азимут и угол места источника сигнала, а также одновременно снятые результаты измерений датчика 10 (фиг.1) угла вводят в вычислительное устройство 15 как текущие значения этих параметров (фиг.4, операция 29).
В вычислительном устройстве 15 (фиг.1) находят разность текущих и начальных значений данных параметров (фиг.4, операция 30):
Затем проводят следующую операцию 31 - определение углов разворота основания ретранслятора α, β, γ вокруг осей Y, Z, Х и углов β1, γ1 вокруг осей Z1 и X1 (фиг.3а), а также определение текущих поправок на программные азимут и угол места абонентской станции.
Углы разворота основания ретранслятора (текущие значения) за прошедший интервал времени между двумя операциями автосопровождения находят из формул
Угол Δγt измеряют датчиком 10 (фиг.1) угла.
В соответствии с проведенным выше анализом величины к1Δγt и к2Δγt определяют из формул (5) и (8) с заменой ΔГП2 на Δγt, причем величина к2Δγt мала и может не учитываться. Формулы (14) преобразуют к виду
Углы разворота основания (текущие значения) вокруг осей Z1 и X1 находят из формул
С помощью формул (15) и (16) определяют текущие поправки по азимуту и углу места абонентской станции:
где коэффициент к3 находят из формулы (5)

После этого проводят операцию 32 (фиг.4) - сравнение найденных поправок ΔАзct и ΔУМсt с допустимыми значениями соответственно ΔАзсд и ΔУМсд.
Если по обоим углам поправки по абсолютной величине меньше допустимых значений, то операцию коррекции программных углов абонентской станции не проводят (фиг.4, операция 33 - логическая операция И).
При медленных уходах основания ретранслятора операции коррекции программных углов абонентской станции могут осуществлять через значительные интервалы времени, включающие большое количество операций автосопровождения, которые проводят для компенсации уходов КА.
Если по одному или обоим углам поправка превышает допустимую величину, то проводят следующую операцию 34 - коррекцию в вычислительном устройстве 15 (фиг.1) программного значения того угла абонентской станции, отклонение которого от программной величины превышает допустимое значение.
Одновременно производят операцию 35 - коррекцию начальных значений углов соответственно по азимуту абонентской станции (ΔАзсн, αн, βн, Δγн) и углу места абонентской станции (ΔУМсн, βн, Δγн).
При первой операции коррекции программных углов абонентской станции начальные значения углов ΔАзсн, ΔУМсн, αн, βн, Δγн равны 0.
При последующих операциях начальные значения этих углов определяют по результатам предыдущей коррекции программных углов абонентской станции.
Начиная со второй операции коррекции программного угла абонентской станции (азимута или угла места), вместо формул (17) используют формулы

Начальные значения поправок по азимуту (ΔАзсн) и углу места (ΔУМсн) абонентской станции находят по формулам
Начальные значения углов αн и βн определяют с помощью формул (15), а угла Δγн - по показаниям датчика 10 (фиг.1) угла.
Углы Δα, Δγ1t и Δβ1t в формулах (19), с учетом формул (15) и (16), определяют с помощью следующих формул:
где
После этого по результатам коррекции программных углов абонентской станции осуществляют программное наведение (перемещение) передающей антенны 3 на абонентскую станцию по скорректированным углам.
Операцию коррекции программных углов абонентской станции в режиме передачи информации ретранслятора осуществляют постоянно после проведения операции автосопровождения.
Погрешность программного наведения передающей антенны 3 ретранслятора на абонентскую станцию по азимуту в режиме начального наведения включает следующие основные составляющие: навигационную ошибку наведения приемной антенны 1 на источник сигнала - Δн1, навигационную ошибку наведения передающей антенны 3 на абонентскую станцию - Δн2, ошибку точного наведения приемной антенны 1 на источник сигнала - Δтн, ошибку программного перемещения передающей антенны 3 - Δпп.
Погрешность по углу места в этом режиме включает Δн2 и Δпп.
Ошибки Δн1 и Δн2 возникают из-за погрешности определения местонахождения наземного источника сигнала, ретранслятора и абонентской станции.
По азимуту Δн1 и Δн2 соответственно характеризуют погрешности определения ψи и ψc в формуле (1). По углу места Δн1 характеризует погрешность нахождения УМри в формуле (2), а Δн2 - погрешность нахождения УМрс в формуле (10).
Обе ошибки (Δн1 и Δн2) являются случайными. Их значения соответствуют режиму начального наведения ретранслятора и не меняются в процессе эксплуатации (при неподвижных источнике сигнала, ретрансляторе и абонентской станции).
При использовании КА в качестве источника сигнала вместо ошибки Δн1 имеет место ошибка неопределенности (неточности определения) углового положения КА - Δка.
Эта ошибка является случайной и может меняться в процессе эксплуатации в заданных пределах.
Ошибки Δтн и Δпп являются случайными и в процессе эксплуатации могут меняться в заданных пределах.
В режиме передачи информации ретранслятора к указанным погрешностям программного наведения передающей антенны 3 по азимуту и углу места (в режиме начального наведения) добавляются систематические ошибки, вызванные уходами основания ретранслятора. Их максимальные значения равны соответственно допустимым величинам ΔАзсд и ΔУМсд.
Кроме того, аналогично ошибке Δтн, имеют место суммарные случайные ошибки по азимуту и углу места соответственно Δса и Δсу, включающие ошибки слагаемых величин в формулах (19).
Анализ случайных ошибок проводят для нормального закона распределения. При этом максимальной ошибке соответствует уровень 3σ, вероятность превышения которого составляет Р=2,7·10-3.
При отсутствии уходов основания вероятность «ложного» включения операции коррекции программного угла передающей антенны 3 соответствует вероятности выполнения условия Р1А(Δса≥ΔАзсд) или P1У(Δсу≥ΔУМсд).
В результате «ложного» включения операции коррекции возникает дополнительная случайная ошибка наведения передающей антенны 3 соответственно ΔАзсд или
ΔУМсд. При этом происходит изменение начального значения ΔАзсн или ΔУМсн соответственно на величину ΔАзсд или ΔУМсд.
Поэтому при следующей операции автосопровождения вероятность «ложного» включения операции коррекции программного угла передающей антенны 3 уменьшается и соответствует вероятности выполнения условия Р2А(Δса≥2ΔАзсд) или Р2У(Δсу≥2ΔУМсд).
Вероятность случайной ошибки 2ΔАзсд или 2ΔУМсд равна произведению соответственно P1A P2A или P1У Р2У.
Выбирая
обеспечивают значения указанных случайных ошибок наведения передающей антенны 3 соответственно ΔАзсд и ΔУМсд. Т.е. данные случайные ошибки проявляются только при первой операции автосопровождения.
Учитывая сочетание случайных и систематических ошибок, для нахождения суммарных ошибок программного наведения передающей антенны 3 в режиме передачи информации при наземном источнике сигнала соответственно по азимуту и углу места используют формулы


При использовании КА в качестве источника сигнала в формуле (24) ошибку Δн1 заменяют на Δка.
Для рассмотренного примера ретранслятора анализируемые ошибки имеют следующие значения: Δса=Δсу=1,4 угловых минут, Δпп=2 угловые минуты, Δн1=Δн2=3 угловые минуты.
Указанные навигационные ошибки Δн1 и Δн2 соответствуют погрешности определения координаты (по уровню 3σ) объекта (наземного источника сигнала, ретранслятора, абонентской станции) 20 метров и расстоянию между объектами 30 километров. Данная ошибка линейно уменьшается с увеличением расстояния между объектами.
Для современных геостационарных КА величина Δка не превышает 3 угловых минут.
Для обеспечения условий (23) выбирают:
ΔАзсд=1/2Δса=0,7 угловых минут,
ΔУМсд=1/2Δсу=0,7 угловых минут.
Из формул (24) и (25) соответственно находят ΔΣА=5,4 угловых минут; ΔΣУ=4,4 угловых минут.
Непосредственное измерение ΔГП3 и ΔГП4 для рассмотренного примера позволяет повысить точность определения ΔΣУ на 10% (с 4,9 до 4,4 угловых минут) для погрешности негоризонтальности 2 угловые минуты и на 18% (с 5,4 до 4,4 угловых минут) для погрешности негоризонтальности 3 угловые минуты.
Приведенное описание способа позволяет сделать следующее заключение.
Введенные в данном способе дополнительные операции позволяют повысить точность наведения передающей антенны ретранслятора на абонентскую станцию в 1,5-2,5 раза, что приводит к повышению скорости передаваемой информации и улучшению помеховой обстановки.
Компенсация уходов основания ретранслятора при эксплуатации дает возможность отказаться от дорогостоящих громоздких сооружений, повысить мобильность систем связи, использовать ретрансляторы в труднодоступных районах.
Реализация предлагаемого изобретения позволяет отказаться от использования высокоточной дорогостоящей аппаратуры, которая должна применяться при построении измерительных базовых плоскостей.
По оценке за счет упрощения аппаратуры (исключение высокоточного радиокомпаса с разнесенными антеннами и местной вертикали) масса ретранслятора уменьшается на 40-50 кг, электропотребление сокращается на 20-30 Вт. При этом стоимость ретранслятора уменьшается на 15000-25000 у.е.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ПЕРЕДАЮЩЕЙ АНТЕННЫ РЕТРАНСЛЯТОРА | 2007 |
|
RU2328824C1 |
| СПОСОБ ПЕРЕДАЧИ СИГНАЛА СВЧ | 2008 |
|
RU2374764C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОТЕЛЕВИЗИОННОГО СИГНАЛА | 2011 |
|
RU2479923C2 |
| СПОСОБ НАВЕДЕНИЯ ПЕРЕДАЮЩЕЙ АНТЕННЫ РЕТРАНСЛЯТОРА НА АБОНЕНТСКУЮ СТАНЦИЮ | 2005 |
|
RU2308157C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2008 |
|
RU2368077C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОТЕЛЕВИЗИОННОГО СИГНАЛА | 2006 |
|
RU2308154C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2009 |
|
RU2409893C2 |
| УСТРОЙСТВО СВЧ-СВЯЗИ | 2005 |
|
RU2309542C2 |
| СИСТЕМА И СПОСОБ СЛЕЖЕНИЯ АНТЕННОЙ СИСТЕМЫ ЗЕМНОЙ СТАНЦИИ ПОДВИЖНОЙ СПУТНИКОВОЙ СВЯЗИ | 2023 |
|
RU2821956C1 |
| СПОСОБ ОДНОВРЕМЕННОГО ОПРЕДЕЛЕНИЯ ШЕСТИ ПАРАМЕТРОВ ДВИЖЕНИЯ КА ПРИ ПРОВЕДЕНИИ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ ОДНОЙ СТАНЦИЕЙ СЛЕЖЕНИЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2555247C1 |
Изобретение относится к системам связи и предназначено для ретрансляции радиотелевизионных сигналов. Сущность заявленного способа заключается в проведении дополнительных операций при наведении передающей и приемной антенн, которые проводят в режиме начального наведения ретранслятора и в режиме передачи информации, с использованием дополнительного датчика угла и возможности компенсации уходов основания ретранслятора. Достигаемый технический результат заключается в повышении точности наведения передающей антенны ретранслятора, в упрощении аппаратуры при эксплуатации. 4 ил.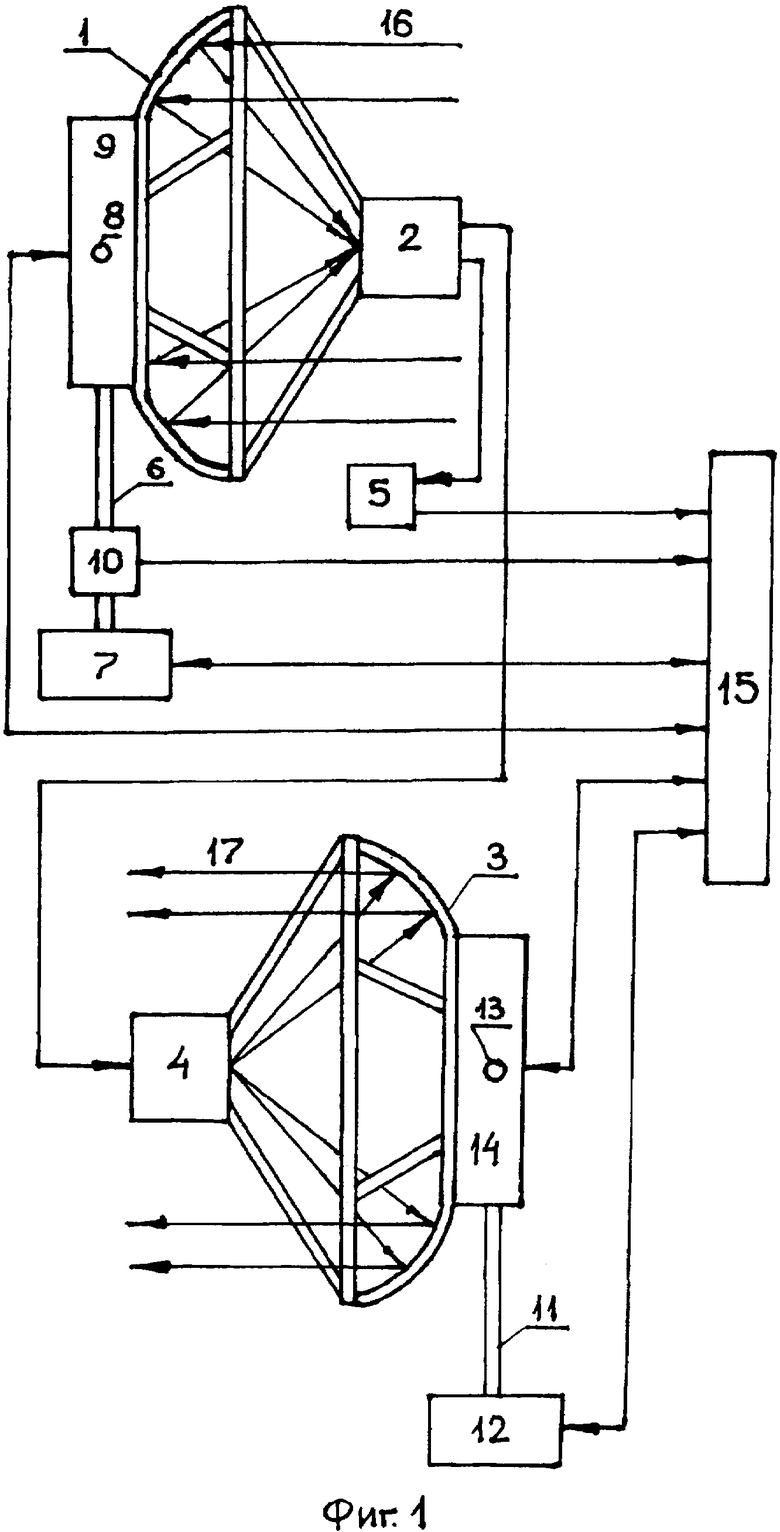
Способ наведения антенн ретранслятора, при котором производят наведение приемной антенны ретранслятора на источник сигнала, причем при наведении проводят разворот приемной антенны по азимуту и углу места до захвата сигнала, а затем точное наведение приемной антенны по азимуту и углу места с использованием программного наведения и операции автосопровождения с коррекцией по принимаемому сигналу, а также производят программное наведение передающей антенны ретранслятора на абонентскую станцию на рассчитанные азимут и угол места, отличающийся тем, что вводят режим начального наведения ретранслятора, в этом режиме перед наведением приемной антенны на источник сигнала ее устанавливают по азимуту на угол, отличающийся на 90° от направления на источник сигнала, и измеряют угол основания ретранслятора относительно плоскости горизонта с помощью датчика угла, установленного на азимутальной оси приемной антенны, после этого производят разворот приемной антенны сначала по углу места на расчетный угол источника сигнала, с учетом измеренного угла основания ретранслятора, а затем разворот по азимуту до захвата сигнала, после чего в режиме точного наведения приемной антенны на источник сигнала после проведения операции автосопровождения уточняют азимут и угол места источника сигнала, а также в этом режиме с помощью датчика угла измеряют угол основания ретранслятора относительно плоскости горизонта, найденные в режиме точного наведения приемной антенны углы вводят в вычислительное устройство и используют как начальные значения при последующей операции коррекции программных азимута и угла места абонентской станции в режиме передачи информации ретранслятора, при этом также азимут источника сигнала и угол основания ретранслятора относительно плоскости горизонта используют для нахождения программного азимута абонентской станции в режиме начального наведения ретранслятора, после этого приемную антенну устанавливают по азимуту сначала на угол, отличающийся от азимута абонентской станции на 90°, а затем приемную антенну устанавливают на угол, соответствующий азимуту абонентской станции, в обоих положениях измеряют с помощью датчика угла угол основания ретранслятора относительно плоскости горизонта, данные измерения используют для определения поправок величин азимута и угла места абонентской станции, после чего приемную антенну наводят по азимуту на источник сигнала и осуществляют программное наведение в режиме точного наведения, а передающую антенну наводят по рассчитанным азимуту и углу места с учетом найденных поправок на абонентскую станцию, затем в режиме передачи информации ретранслятора циклически после каждой операции автосопровождения приемной антенны в вычислительное устройство вводят текущие значения трех параметров: азимута и угла места приемной антенны, а также угла разворота приемной антенны, определяемого с помощью датчика угла, после этого находят разности текущих и начальных значений указанных параметров, производят определение уходов основания ретранслятора по результатам измерения указанных трех параметров и находят поправки к программным значениям азимута и угла места абонентской станции, найденные поправки обоих углов сравнивают с допустимыми отклонениями, после чего при превышении одной или обеими поправками допустимого отклонения проводят коррекцию программного значения того угла абонентской станции, отклонение которого от программной величины превышает допустимое значение, одновременно с этим для данного угла абонентской станции производят коррекцию начальных значений углов разворота основания ретранслятора, а также начального значения поправки к программному значению этого угла, затем осуществляют программное наведение передающей антенны на абонентскую станцию по скорректированным углам.
| ФРОЛОВ О.П | |||
| Антенны для земных станций спутниковой связи | |||
| - М.: Радио и связь, 2000, с.260-265 | |||
| РАДИОКАНАЛЬНАЯ СИСТЕМА ДЛЯ ПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2228860C1 |
| RU 2070738 C1, 20.12.1996 | |||
| МНОГОФУНКЦИОНАЛЬНАЯ СИСТЕМА ИНТЕГРАЦИИ И ПЕРЕДАЧИ ДАННЫХ ВИДЕОИНФОРМАЦИОННЫХ УСЛУГ | 2004 |
|
RU2271074C1 |
| US 5570097 A, 29.10.1996 | |||
| WO 9626607 A1, 29.08.1996 | |||
| US 6061095 A, 09.05.2000. | |||

