Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится к технической области лечения ультразвуком и, в частности, относится к способу локализации поражения и системе локализации поражения.
Предшествующий уровень техники настоящего изобретения
С фокусировкой ультразвуковых волн в технологии обработки сфокусированным ультразвуком высокой интенсивности можно формировать на поражении высокоинтенсивную и непрерывную ультразвуковую энергию, вызывая тем самым кратковременный высокотемпературный эффект, кавитационный эффект, механический эффект и сонохимический эффект, разрушение клеточных мембран и ядерных мембран, коагуляцию белка и выборочно вызывая коагуляционный некроз пораженных тканей с целью прекращения пролиферации, инфильтрации и возможности перемещения поражения.
В процессе лечения с помощью существующего устройства для ультразвуковой обработки, для локализации поражения обычно используют ультразвуковой датчик в В-режиме, и в процессе локализации ультразвуковой датчик в В-режиме необходимо многократно перемещать для помощи врачу в визуализации окружающей анатомической структуры поражения, анализе и поиске места поражения, что сложно и требует много времени.
Краткое раскрытие настоящего изобретения
Ввиду вышеупомянутых недостатков существующего уровня техники, цель настоящего изобретения состоит в том, чтобы предоставить способ локализации поражения и систему локализации поражения, которые могут решить проблемы сложного процесса и длительных затрат времени при локализации поражения в существующем уровне техники.
Для достижения вышеуказанных и других связанных целей:
в настоящем раскрытии представлен способ локализации поражения, предусматривающий локализацию поражения путем локализации метки на поверхности тела; использование при локализации блока получения изображения для локализации метки, при этом блок получения изображения содержит ультразвуковой датчик и по меньшей мере одну камеру, расположенную с одной или обеих сторон плоскости секторного сканирования ультразвукового датчика и зафиксированную на месте относительно ультразвукового датчика, а центральная линия камеры параллельна центральной линии ультразвукового датчика, причем способ локализации поражения предусматривает:
формирование эталонного изображения в соответствии с данными, полученными камерой в режиме реального времени, при этом эталонное изображение имеет заданный размер, а на эталонном изображении формируется виртуальная точка метки, соответствующая метке; и
определение в соответствии с положением виртуальной точки метки на эталонном изображении и фактическим взаимным расположением камеры и ультразвукового датчика, фактической траектории локализации, которая обеспечивает совпадение центральной линии ультразвукового датчика с меткой.
Необязательно формирование эталонного изображения в соответствии с данными, полученными камерой в режиме реального времени, предусматривает:
ввод команды предварительной локализации, в соответствии с которой блок получения изображения перемещается в положение над меткой;
оценку, когда блок получения изображения выполняет команду предварительной локализации, содержит ли текущее изображение, полученное и сформированное камерой в режиме реального времени, виртуальную точку метки, соответствующую метке;
назначение, если текущее изображение содержит виртуальную точку метки, соответствующую метке, текущего изображения в качестве эталонного изображения и текущего расстояния по высоте от ультразвукового датчика до метки в качестве высоты предварительной локализации и повторный ввод, если текущее изображение не содержит виртуальной точки метки, соответствующей метке, команды предварительной локализации, пока не будет сформировано эталонное изображение.
Необязательно, расчет фактической траектории локализации дополнительно предусматривает:
ограничение, в соответствии с высотой предварительной локализации, граничного условия движения блока получения изображения, чтобы ультразвуковой датчик мог перемещаться в пределах заданной плоскости, при этом заданная плоскость представляет собой плоскость, перпендикулярную центральной линии ультразвукового датчика и соответствующую высоте предварительной локализации.
Необязательно формирование эталонного изображения предусматривает:
установку взаимосвязи пропорциональности изображения между текущим изображением и фактической областью захвата камеры и формирование эталонного изображения в соответствии с взаимосвязью пропорциональности изображения;
установку заданного значения высоты предварительной локализации и ввод команды предварительной локализации таким образом, чтобы высота предварительной локализации была равна заданному значению, а взаимосвязь пропорциональности имела фиксированное значение; или
создание модели расчета взаимосвязи пропорциональности изображения путем принятия заданного значения высоты предварительной локализации в качестве переменной и расчета фактической взаимосвязи пропорциональности изображения после получения значения высоты предварительной локализации;
или
назначение положения установки камеры таким образом, чтобы часть контура бокового края ультразвукового датчика всегда присутствовала на текущем изображении, полученном камерой, и расчет, при установлении взаимосвязи пропорциональности изображения, взаимосвязи пропорциональности изображения на основе фактического расстояния от центральной линии камеры до контура бокового края и эталонного расстояния на эталонном изображении.
Необязательно, когда центральная линия камеры расположена на серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика и сформировано эталонное изображение, центральная линия камеры расположена в центре эталонного изображения, эталонное изображение принимает проекцию серединно-перпендикулярной плоскости к плоскости секторного ультразвукового сканирования в качестве поперечной оси, а направление, перпендикулярное поперечной оси, в качестве продольного направления, а расчет фактической траектории локализации предусматривает: расчет фактического поперечного смещения и фактического продольного смещения, соответственно, при этом расчет фактического продольного смещения предусматривает:
перемещение, в соответствии с положением виртуальной точки метки на эталонном изображении, виртуальной точки метки до виртуального продольного смещения, нужного для совпадения с поперечной осью, и
расчет фактического продольного смещения в соответствии с виртуальным продольным смещением и взаимосвязью пропорциональности изображения.
Необязательно предусмотрена одна камера, и расчет фактического поперечного смещения предусматривает: расчет виртуального поперечного смещения виртуальной точки метки в соответствии с положением виртуальной точки метки на эталонном изображении и расчет фактического поперечного смещения в соответствии с виртуальным поперечным смещением и взаимосвязью пропорциональности изображения, при этом формула расчета виртуального поперечного смещения представляет собой:
где L0 - составляющая виртуального поперечного смещения, а - межцентровое расстояние между ультразвуковым датчиком и камерой, h1 - расстояние по высоте между ультразвуковым датчиком и камерой, h2 - высота предварительной локализации, θ - угол обзора, соответствующий области захвата камеры в поперечном направлении, a L - ширина обзора, соответствующая эталонному изображению в поперечном направлении.
Необязательно предусмотрены две камеры, в том числе первая камера и вторая камера, при этом первая камера и вторая камера симметрично расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика и имеют одинаковую разность высот относительно ультразвукового датчика, первая камера получает данные и формирует первое эталонное изображение, а вторая камера получает данные и формирует второе эталонное изображение, и расчет фактического поперечного смещения включает в себя расчет фактического поперечного смещения из положения виртуальной точки метки на первом эталонном изображении и положения виртуальной точки метки на втором эталонном изображении, при этом формула расчета фактического поперечного смещения представляет собой:
где у - составляющая фактического поперечного смещения, а - межцентровое расстояние между ультразвуковым датчиком и каждой камерой, L1 - поперечное расстояние между виртуальной точкой метки на первом эталонном изображении и центром изображения; a L2 - поперечное расстояние между виртуальной точкой метки на втором эталонном изображении и центром изображения; каждое из изображений, полученных первой камерой и второй камерой, имеет угол θ обзора в поперечном направлении; и первое эталонное изображение и второе эталонное изображение имеют заданную ширину L изображения.
Необязательно предусмотрены две камеры, включая первую камеру и вторую камеру, при этом первая камера и вторая камера расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика, по меньшей мере одна из первой камеры или второй камеры имеет центральную линию, отклоняющуюся от серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, и первая камера и вторая камера имеют одинаковую разность высот относительно ультразвукового датчика, первая камера получает данные и формирует первое эталонное изображение, а вторая камера получает данные и формирует второе эталонное изображение, а расчет фактической траектории локализации предусматривает: расчет виртуального поперечного смещения и виртуального продольного смещения в соответствии с положениями виртуальной точки метки на первом эталонном изображении и втором эталонном изображении; и расчет фактического поперечного смещения и фактического продольного смещения в соответствии с виртуальным поперечным смещением, виртуальным продольным смещением и взаимосвязью пропорциональности изображения; причем
при расчете виртуального поперечного смещения и виртуального продольного смещения за начало отсчета принимается виртуальная точка проекции центральной линии ультразвукового датчика, виртуальная линия проекции секторного сканирования плоскости секторного сканирования ультразвукового датчика принимается в качестве оси Y, а виртуальная серединно-перпендикулярная линия проекции серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика принимается в качестве оси X для установления системы координат, и в соответствии с положениями виртуальной точки метки на первом эталонном изображении и втором эталонном изображении, определяется набор формул расчета координат виртуальной точки метки:


где координаты виртуальной точки 41 метки равны (x1, y1), θ1 - угол между виртуальной точкой 41 метки и плоскостью секторного сканирования ультразвукового датчика (соответствующей оси X) на первом эталонном изображении 4а, координатное положение первой камеры 21 равно (a1, b1), координатное положение второй камеры 22 равно (а2, b2), а θ2 - угол между виртуальной точкой 41 метки и плоскостью секторного сканирования ультразвукового датчика (соответствующей оси X) на втором эталонном изображении 4b.
Необязательно, эталонная шкала с фиксированным положением и формой устанавливается в соответствии с эталонным изображением, при этом эталонная шкала имеет соответствующие значения масштаба, которые преобразуются и отображаются как значения размера, соответствующие фактической области захвата камеры в соответствии с пропорцией изображения.
Необязательно, камеры разделены по меньшей мере на две группы камер, каждая из которых включает в себя одну или две камеры, фактическая траектория локализации, подлежащая проверке, формируется в соответствии с эталонным изображением, полученным и сформированным группой камер, и конечная фактическая траектория локализации получается в соответствии по меньшей мере с двумя фактическими траекториями локализации, подлежащими проверке, при этом:
предусмотрены по меньшей мере две камеры, в том числе первая камера и вторая камера, при этом первая камера и вторая камера расположены симметрично по двум сторонам плоскости секторного сканирования ультразвукового датчика, и каждая из них имеет центральную линию на серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика и одинаковую разность высот относительно ультразвукового датчика, и при локализации поражения первая фактическая траектория локализации рассчитывается из соответствующего эталонного изображения, сформированного первой камерой или второй камерой, вторая фактическая траектория локализации рассчитывается из соответствующих эталонных изображений, сформированных первой камерой и второй камерой, а окончательная фактическая траектория локализации определяется из первой фактической траектории локализации и второй фактической траектории локализации;
или
предусмотрены по меньшей мере две камеры, в том числе первая камера и вторая камера, при этом первая камера и вторая камера расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика, центральная линия первой камеры расположена на серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, а центральная линия второй камеры отклоняется от серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, первая камера и вторая камера имеют одинаковую разность высот относительно ультразвукового датчика, и при локализации поражения первая фактическая траектория локализации рассчитывается на основе соответствующего эталонного изображения, сформированного первой камерой, вторая фактическая траектория локализации рассчитывается на основе соответствующих эталонных изображений, сформированных двумя камерами, а окончательная фактическая траектория локализации определяется из первой фактической траектории локализации и второй фактической траектории локализации;
или
предусмотрено по меньшей мере три камеры, включая первую камеру, вторую камеру и третью камеру, при этом первая камера и третья камера расположены по одну сторону от плоскости секторного сканирования ультразвукового датчика, вторая камера расположена с другой стороны плоскости секторного сканирования ультразвукового датчика, центральная линия третьей камеры расположена на серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, а центральные линии первой камеры и второй камеры отклоняются от серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, первая камера, вторая камера и третья камера имеют одинаковую разность высот относительно ультразвукового датчика, и при локализации поражения первая фактическая траектория локализации рассчитывается из соответствующего эталонного изображения, сформированного третьей камерой, вторая фактическая траектория локализации рассчитывается из соответствующих эталонных изображений, сформированных первой камерой и второй камерой, а окончательная фактическая траектория локализации определяется из первой фактической траектории локализации и второй фактической траектории локализации; или
предусмотрено по меньшей мере четыре камеры, включая первую камеру, вторую камеру, третью камеру и четвертую камеру, при этом первая камера и вторая камера симметрично расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика, и каждая имеет центральную линию на серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, причем третья камера и четвертая камера расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика, и каждая имеет центральную линию, отклоняющуюся от серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, первая фактическая траектория локализации рассчитывается из соответствующих эталонных изображений, сформированных первой и второй камерами, вторая фактическая траектории локализации рассчитывается из соответствующих эталонных изображений, сформированных третьей и четвертой камерами, а окончательная фактическая траектория локализации определяется из первой фактической траектории локализации и второй фактической траектории локализации;
или
предусмотрено по меньшей мере четыре камеры, включая первую камеру, вторую камеру, третью камеру и четвертую камеру, при этом первая камера и вторая камера симметрично расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика, и каждая имеет центральную линию на серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, причем третья камера и четвертая камера расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика, и каждая имеет центральную линию, отклоняющуюся от серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, первая фактическая траектория локализации рассчитывается из соответствующих эталонных изображений, сформированных первой и второй камерами, вторая фактическая траектории локализации рассчитывается из соответствующих эталонных изображений, сформированных третьей и четвертой камерами, и третья фактическая траектория локализации рассчитывается из соответствующего эталонного изображения, сформированного первой камерой или второй камерой, а окончательная фактическая траектория локализации определяется из первой фактической траектории локализации, второй фактической траектории локализации траектория и третьей фактической траектории локализации.
Необязательно, способ локализации поражения дополнительно предусматривает:
соединение, в соответствии с фактическим взаимным расположением камеры и ультразвукового датчика, центральной линии ультразвукового датчика на эталонном изображении в качестве виртуальной точки проекции; и
определение фактической траектории локализации, в том числе: определение в соответствии с взаимным расположением виртуальной точки метки и виртуальной точки проекции на эталонном изображении, направления движения, соответствующего совпадению виртуальной точки проекции и виртуальной точки метки, и управление движением ультразвукового датчика в соответствии с направлением движения до тех пор, пока виртуальная точка проекции и виртуальная точка метки не совпадут друг с другом на эталонном изображении.
Соответственно, в настоящем изобретении также предложена система локализации поражения, которая определяет местонахождение поражения путем локализации метки на поверхности тела и предусматривает:
блок получения изображения, содержащий ультразвуковой датчик и по меньшей мере одну камеру, расположенную с одной или обеих сторон плоскости секторного сканирования ультразвукового датчика и зафиксированную на месте относительно ультразвукового датчика, при этом центральная линия камеры параллельна центральной линии ультразвукового датчика;
устройство отображения эталонного изображения, выполненное с возможностью отображения эталонного изображения, при этом эталонное изображение формируется в соответствии с данными, полученными камерой в режиме реального времени, эталонное изображение имеет размер фиксированного значения, а на эталонном изображении сформирована виртуальная точка метки, соответствующая метке; и
процессор, включающий в себя блок расчета фактической траектории локализации, выполненный с возможностью расчета, в соответствии с положением виртуальной точки метки на эталонном изображении и фактическим взаимным расположением камеры и ультразвукового датчика, фактической траектории локализации, которая обеспечивает совпадение центральной линии ультразвукового датчика с меткой.
Необязательно, система локализации поражения дополнительно содержит:
блок ввода команды предварительной локализации, выполненный с возможностью ввода команды предварительной локализации, в соответствии с которой блок получения изображения перемещается в положение над меткой; и
исполнительный механизм, выполненный с возможностью приведения в движение блока получения изображения;
при этом процессор содержит блок обработки предварительной локализации, выполненный с возможностью управления исполнительным механизмом для перемещения в соответствии с командой предварительной локализации, определения, после того как действие, соответствующее команде предварительной локализации, завершено исполнительным механизмом, содержит ли текущее изображение, полученное и сформированное камерой, виртуальную точку метки, соответствующую метке, и назначения, если текущее изображение содержит виртуальную точку метки, соответствующую метке, текущего изображения в качестве эталонного изображения.
Необязательно, блок расчета траектории фактической локализации имеет подблок расчета граничного условия движения для расчета граничного условия движения, и подблок расчета граничного условия движения выполнен с возможностью ограничения, в соответствии с высотой до локализации, граничного условия движения блока получения изображения, чтобы ультразвуковой датчик мог перемещаться в заданной плоскости, при этом заданная плоскость представляет собой плоскость, перпендикулярную центральной линии ультразвукового датчика и соответствующую высоте предварительной локализации.
Необязательно, процессор дополнительно содержит блок формирования изображения, выполненный с возможностью: установки взаимосвязи пропорциональности изображения между текущим изображением и фактической областью захвата камеры и формировать эталонное изображение в соответствии с взаимосвязью пропорциональности изображения;
установки заданного значения высоты предварительной локализации и ввода команды предварительной локализации, чтобы высота предварительной локализации была равна заданному значению, а взаимосвязь пропорциональности имела фиксированное значение; или
создания модели расчета взаимосвязи пропорциональности изображения, принимая заданное значение высоты предварительной локализации в качестве переменной, и расчета фактической взаимосвязи пропорциональности изображения после получения значения высоты предварительной локализации;
или
назначения положения установки камеры таким образом, чтобы часть контура бокового края ультразвукового датчика всегда присутствовала на текущем изображении, полученном камерой, и расчета, при установлении взаимосвязи пропорциональности изображения, взаимосвязи пропорциональности изображения на основе фактического расстояния от центральной линии камеры до контура бокового края и эталонного расстояния на эталонном изображении.
Необязательно, центральная линия камеры расположена на серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, так что
блок формирования изображения выполнен с возможностью: формирования эталонного изображения таким образом, чтобы центральная линия камеры располагалась в центре эталонного изображения, эталонное изображение принимает проекцию серединно-перпендикулярной плоскости к плоскости секторного ультразвукового сканирования в качестве поперечной оси и направление, перпендикулярное поперечной оси, в качестве продольного направления; и
блок расчета фактической траектории локализации содержит подблок расчета фактического поперечного смещения и подблок расчета фактического продольного смещения, при этом подблок расчета фактического продольного смещения выполнен с возможностью: перемещения, в соответствии с положением виртуальной точки метки на эталонном изображении, виртуальной точки метки с продольным смещением, необходимым для совпадения с поперечной осью, и расчета фактического продольного смещения в соответствии с виртуальным продольным смещением и взаимосвязью пропорциональности изображения.
Необязательно предусмотрена одна камера, а подблок расчета фактического поперечного смещения выполнен с возможностью: расчета виртуального поперечного смещения виртуальной точки метки в соответствии с положением виртуальной точки метки на эталонном изображении и расчета фактического поперечного смещения в соответствии с виртуальным поперечным смещением и взаимосвязью пропорциональности изображения, причем
формула расчета виртуального поперечного перемещения представляет собой:
где L0 - составляющая виртуального поперечного смещения, а - межцентровое расстояние между ультразвуковым датчиком и камерой, h1 - расстояние по высоте между ультразвуковым датчиком и камерой, h2 - высота предварительной локализации, θ - угол обзора, соответствующий области захвата камеры в поперечном направлении, a L - ширина обзора, соответствующая эталонному изображению в поперечном направлении.
Необязательно предусмотрены две камеры, включая первую камеру и вторую камеру, при этом первая камера и вторая камера симметрично расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика и имеют одинаковую разность высот относительно ультразвукового датчика;
блок формирования изображения выполнен с возможностью: формирования первого эталонного изображения из данных, полученных первой камерой, и формирования второго эталонного изображения из данных, полученных второй камерой; и
подблок расчета фактического поперечного смещения выполнен с возможностью: расчета фактического поперечного смещения из положения виртуальной точки метки на первом эталонном изображении и положения виртуальной точки метки на втором эталонном изображении, при этом формула расчета фактического поперечного водоизмещение представляет собой:
где у - составляющая фактического поперечного смещения, а - межцентровое расстояние между ультразвуковым датчиком и каждой камерой, L1 - поперечное расстояние между виртуальной точкой метки на первом эталонном изображении и центром изображения; a L2 - поперечное расстояние между виртуальной точкой метки на втором эталонном изображении и центром изображения; каждое из изображений, полученных первой камерой и второй камерой, имеет угол θ обзора в поперечном направлении; и первое эталонное изображение и второе эталонное изображение имеют заданную ширину L изображения.
Необязательно предусмотрены две камеры, включая первую камеру и вторую камеру, при этом первая камера и вторая камера расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика, по меньшей мере одна из первой камеры или второй камеры имеет центральную линию, отклоняющуюся от серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, и первая камера и вторая камера имеют одинаковую разность высот относительно ультразвукового датчика;
блок формирования изображения выполнен с возможностью: формирования первого эталонного изображения из данных, полученных первой камерой, и формирования второго эталонного изображения из данных, полученных второй камерой; и
блок расчета траектории фактической локализации выполнен с возможностью: расчета виртуального поперечного смещения и виртуального продольного смещения в соответствии с положениями виртуальной точки метки на первом эталонном изображении и втором эталонном изображении; и расчета фактического поперечного смещения и фактического продольного смещения в соответствии с виртуальным поперечным смещением, виртуальным продольным смещением и взаимосвязью пропорциональности изображения; причем
при расчете виртуального поперечного смещения и виртуального продольного смещения за начало отсчета принимается виртуальная точка проекции центральной линии ультразвукового датчика, виртуальная линия проекции секторного сканирования плоскости секторного сканирования ультразвукового датчика принимается в качестве оси Y, а виртуальная серединно-перпендикулярная линия проекции серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика принимается в качестве оси X для установления системы координат, и в соответствии с положениями виртуальной точки метки на первом эталонном изображении и втором эталонном изображении, определяется набор формул расчета координат виртуальной точки метки:


где координаты виртуальной точки 41 метки равны (x1, y1), θ1 - угол между виртуальной точкой 41 метки и плоскостью секторного сканирования ультразвукового датчика (соответствующей оси X) на первом эталонном изображении 4а, координатное положение первой камеры 21 равно (a1, b1), координатное положение второй камеры 22 равно (а2, b2), а θ2 - угол между виртуальной точкой 41 метки и плоскостью секторного сканирования ультразвукового датчика (соответствующей оси X) на втором эталонном изображении 4b.
Необязательно, на эталонном изображении или на устройстве отображения эталонного изображения предусмотрена эталонная шкала, эталонная шкала имеет соответствующие значения масштаба, которые преобразуются и отображаются как значения размера, соответствующие фактической области захвата камеры в соответствии с пропорцией изображения.
Необязательно, система локализации поражения снабжена по меньшей мере двумя группами камер, каждая из которых включает одну или две камеры, каждый блок расчета фактической траектории локализации получает фактическую траекторию локализации, которая должна быть проверена в соответствии с одной группой камер, и процессор дополнительно содержит блок проверки, выполненный с возможностью получения окончательной фактической траектории локализации в соответствии по меньшей мере с двумя фактическими траекториями локализации, подлежащими проверке.
Необязательно, процессор дополнительно выполнен с возможностью:
соединения, в соответствии с фактическим взаимным расположением камеры и ультразвукового датчика, центральной линии ультразвукового датчика на эталонном изображении в качестве виртуальной точки проекции; и
определения фактической траектории локализации, включая: определение в соответствии с взаимным расположением виртуальной точки метки и виртуальной точки проекции на эталонном изображении, направления движения, соответствующего совпадению виртуальной точки проекции и виртуальной точки метки, и управление движением ультразвукового датчика в соответствии с направлением движения до тех пор, пока виртуальная точка проекции и виртуальная точка метки не совпадут друг с другом на эталонном изображении.
В соответствии со способом локализации поражения и системой локализации поражения в соответствии с настоящим изобретением камера используется для сбора данных камеры и формирования эталонного изображения, которое помогает ультразвуковому датчику быстро определять локализацию, так что сложность локализации уменьшается, повышается эффективность локализации поражения и экономится время операции.
Краткое описание фигур
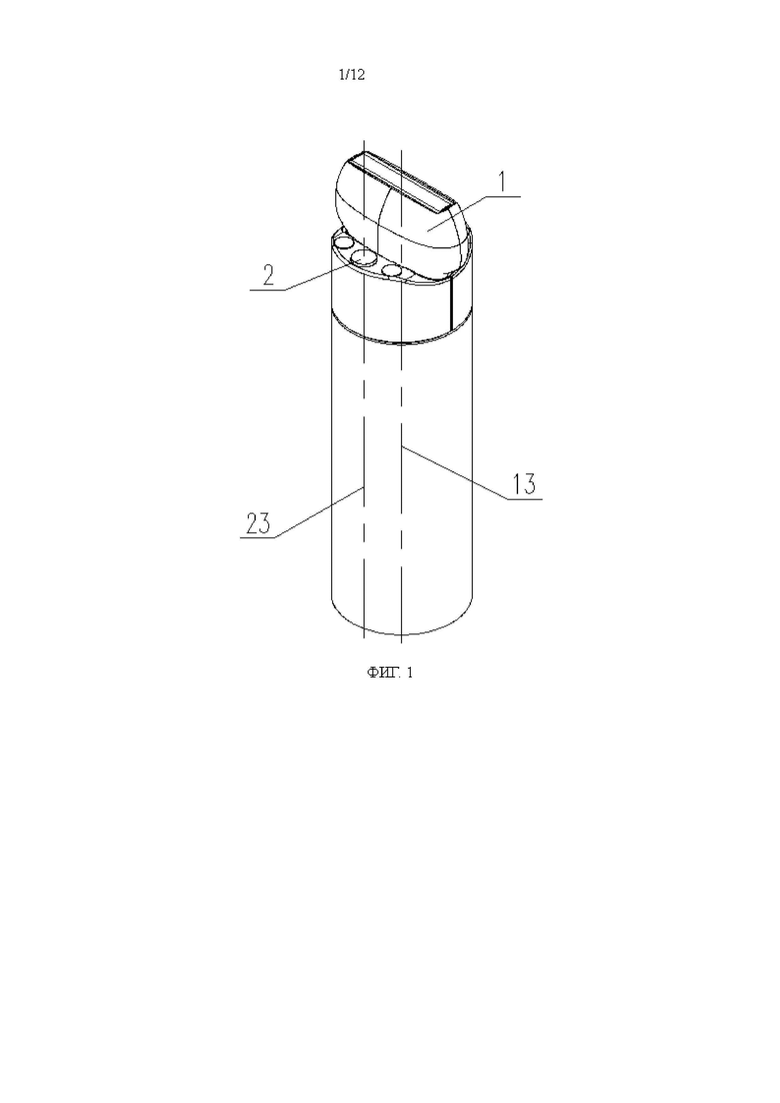
На фиг. 1 показана иллюстративная структурная схема блока получения изображения с использованием одной камеры в соответствии с настоящим изобретением;
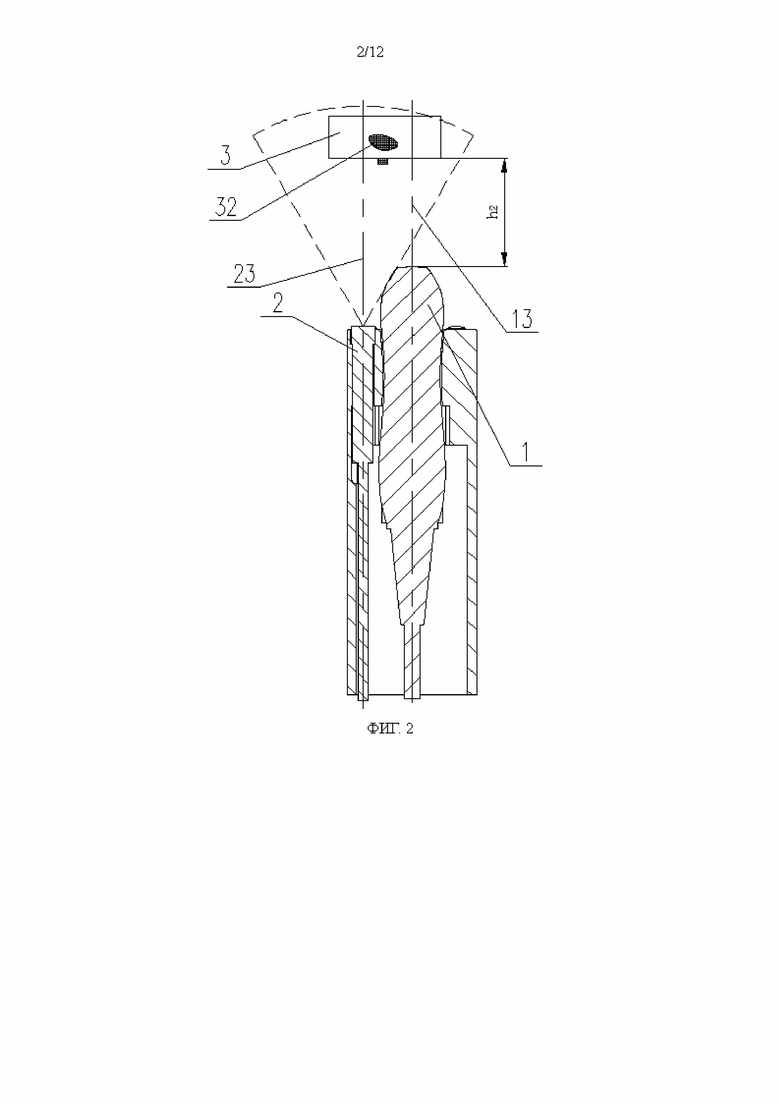
На фиг. 2 схематично показано взаимное расположение блока получения изображения согласно фиг. 1 с меткой и поражением на виде спереди, когда ультразвуковой датчик расположен на высоте предварительной локализации;
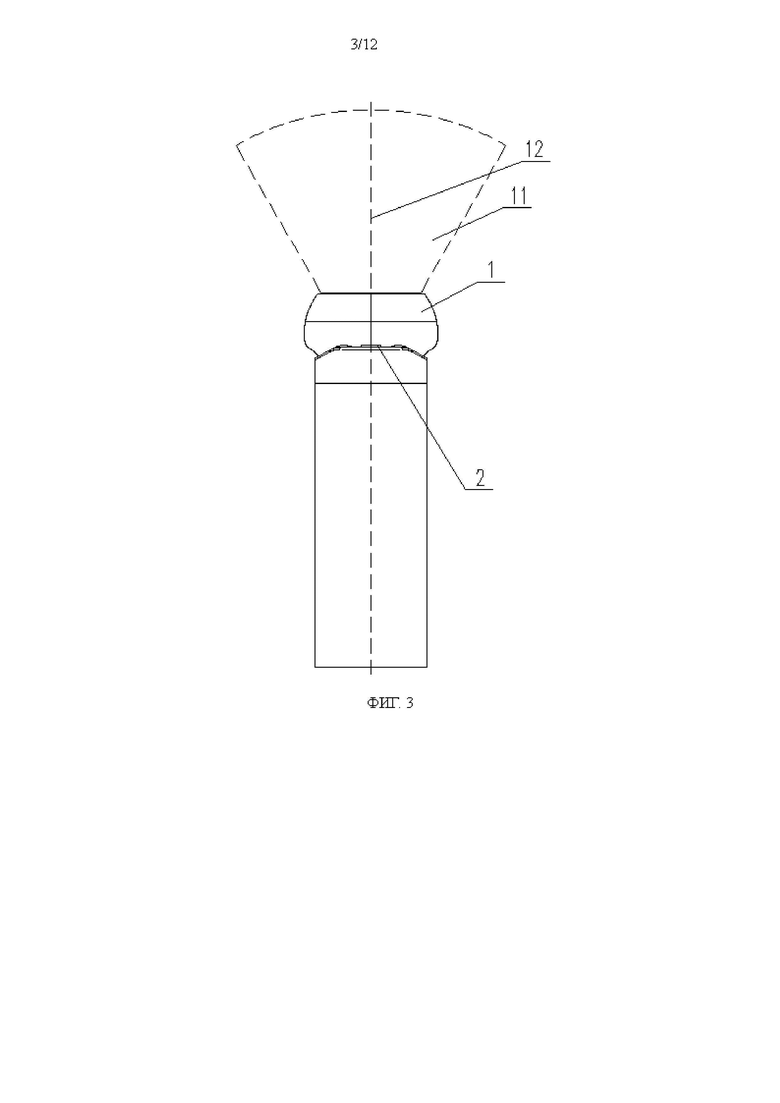
На фиг. 3 показан вид блока получения изображения согласно фиг. 1 на виде слева;
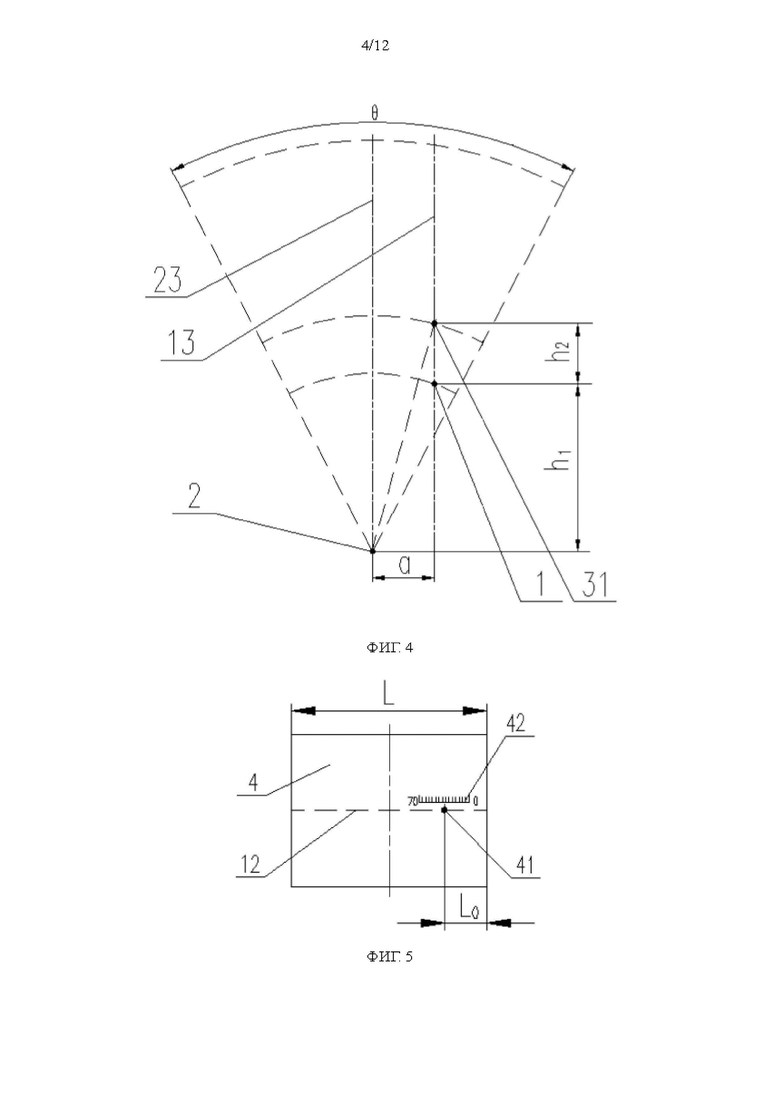
На фиг. 4 схематично показано взаимное расположение ультразвукового датчика, камеры и метки, когда ультразвуковой датчик блока получения изображения согласно фиг. 1 расположен на высоте предварительной локализации;
На фиг. 5 показано иллюстративное эталонное изображение, сформированное блоком сбора данных согласно фиг. 1;
На фиг. 6 показано схематичное взаимное расположение блока получения изображения с меткой и поражением, когда ультразвуковой датчик расположен на высоте предварительной локализации (с симметрично расположенными камерами);
На фиг. 7 схематично показано взаимное расположение ультразвукового датчика, камеры и метки на фиг. 6;
На фиг. 8 показано первое эталонное изображение, соответственно сформированное блоком получения изображения согласно фиг. 6;
На фиг. 9 показано второе эталонное изображение, соответственно сформированное блоком получения изображения согласно фиг. 6;
На фиг. 10 схематично показано взаимное расположение блока получения изображения с меткой и поражением в трехмерном пространстве, когда ультразвуковой датчик расположен на высоте предварительной локализации (с камерами, расположенными не симметрично);
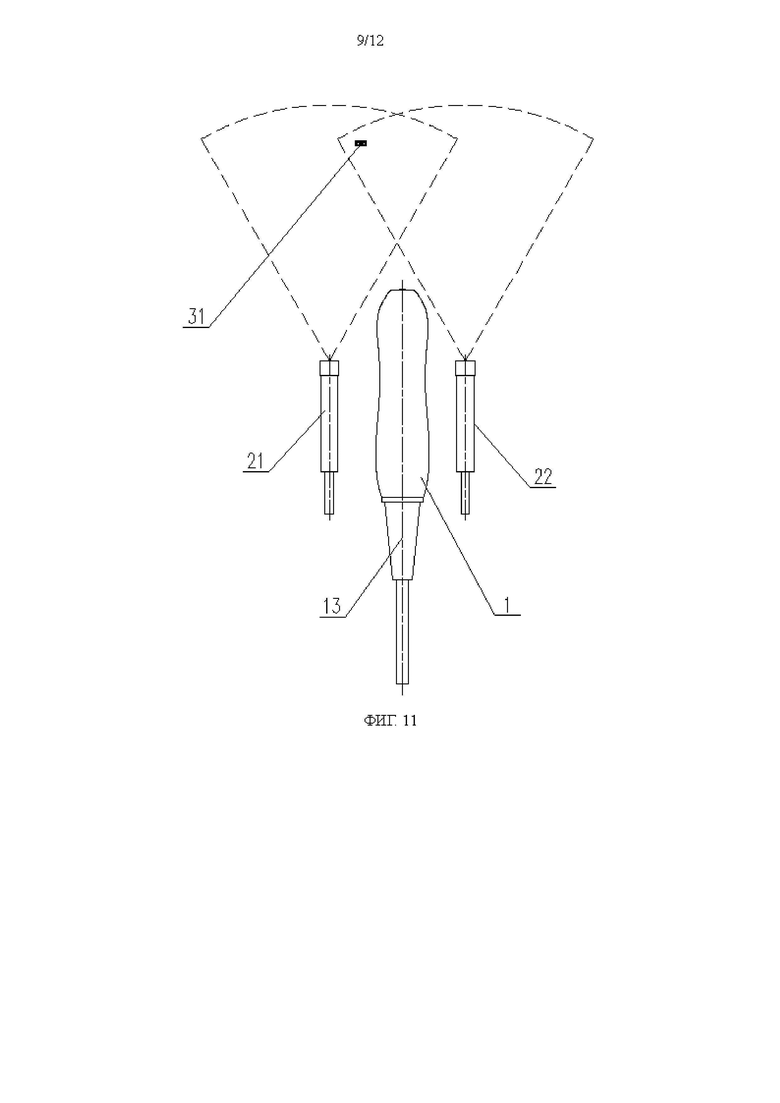
На фиг. 11 схематично показано взаимное расположение блока получения изображения с меткой и поражением на виде спереди, когда ультразвуковой датчик расположен на высоте предварительной локализации (с камерами, расположенными не симметрично);
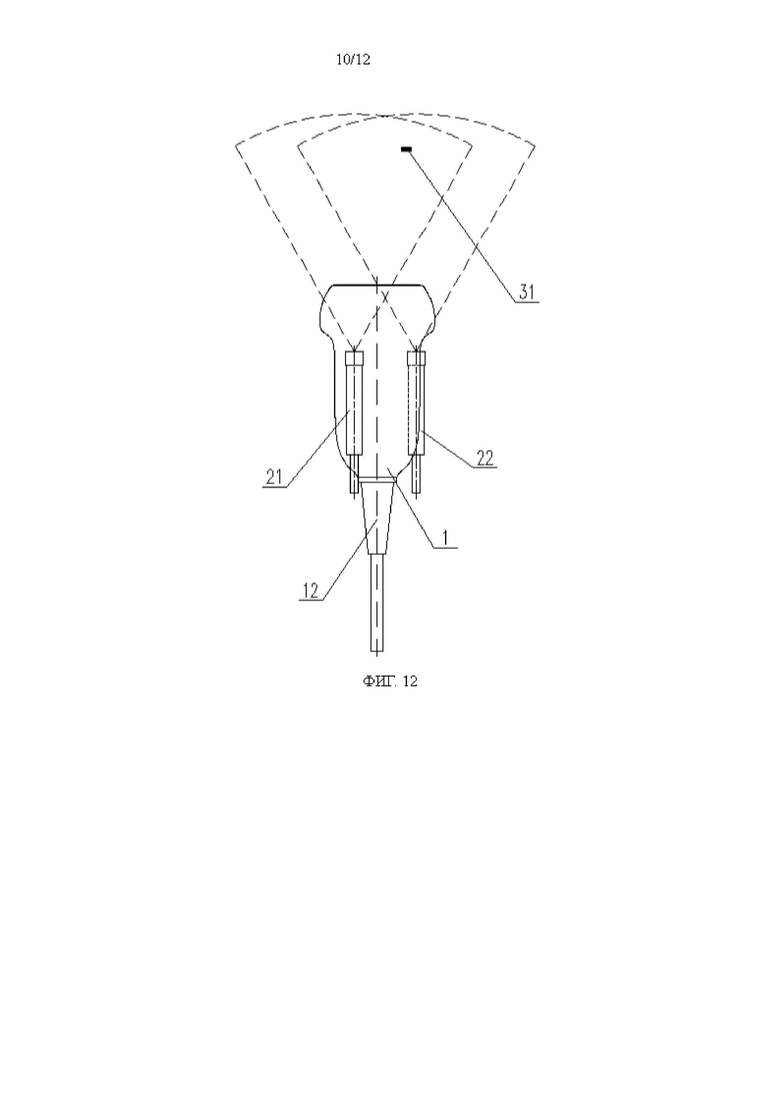
На фиг. 12 схематично показано взаимное расположение блока получения изображения с меткой и поражением на виде слева, когда ультразвуковой датчик расположен на высоте предварительной локализации (с камерами, расположенными не симметрично);
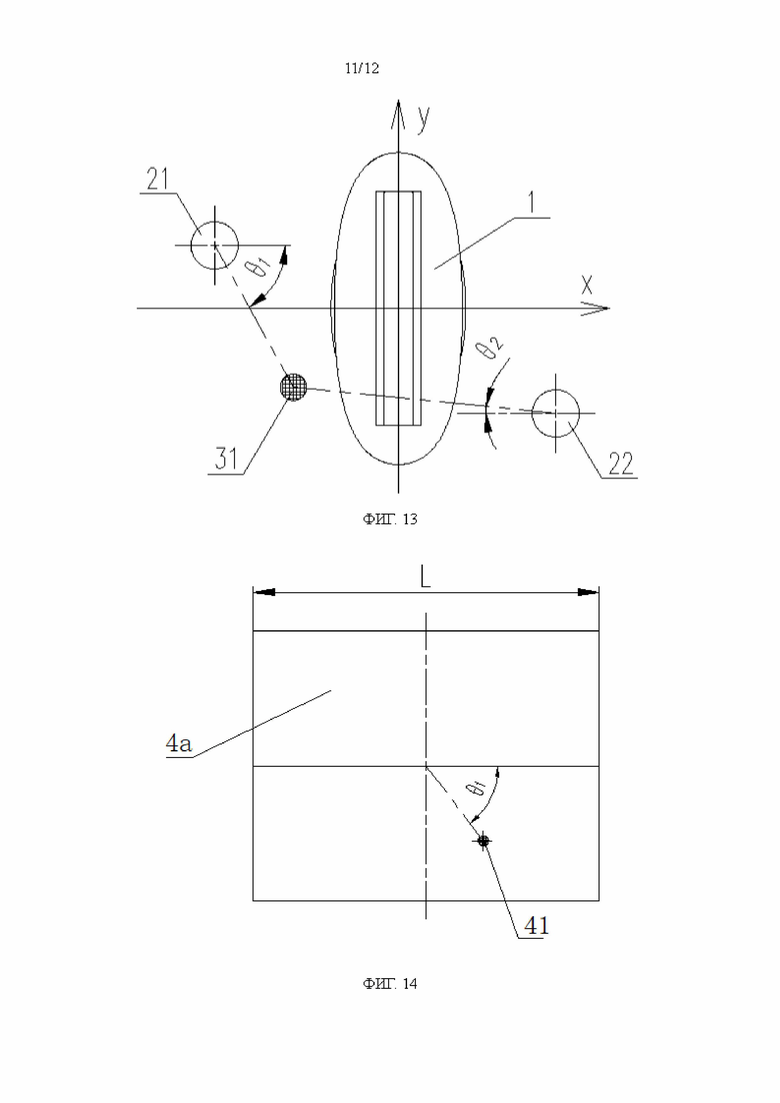
На фиг. 13 схематично показана система координат, с установленным ультразвуковым датчиком в качестве точки отсчета с использованием блока получения изображения согласно фиг. 10;
На фиг. 14 показано первое эталонное изображение, соответственно сформированное блоком получения изображения согласно фиг. 10; а
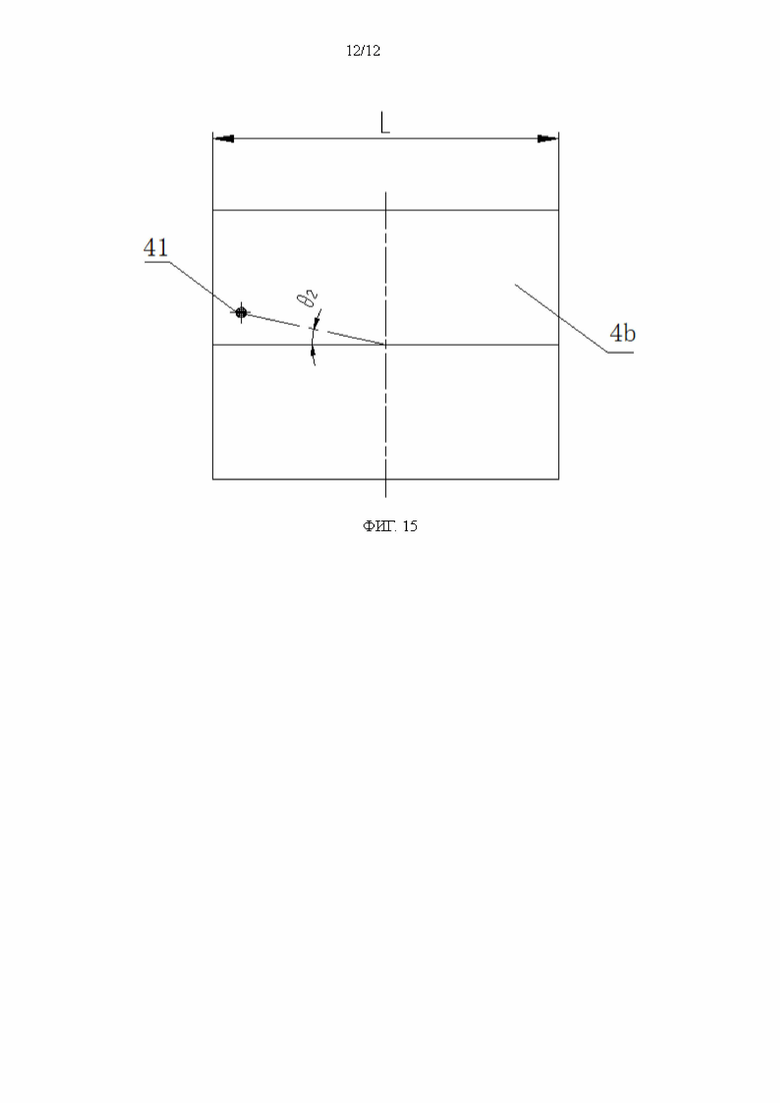
На фиг. 15 показано второе эталонное изображение, соответственно сформированное блоком получения изображения согласно фиг. 10.
Подробное раскрытие настоящего изобретения
Далее описаны варианты исполнения настоящего изобретения посредством конкретных вариантов осуществления, и другие преимущества и эффекты настоящего раскрытия будут очевидны специалистам в данной области техники из раскрытия в данном документе.
Следует понимать, что термины «верхний», «нижний», «левый», «правый», «средний», «один» и т.п.используются в описании только для ясности описания, а не для ограничения объема реализации настоящего раскрытия, и любое изменение или корректировка относительной взаимосвязи между терминами без каких-либо существенных технических изменений также следует рассматривать как подпадающие под объем реализации настоящего раскрытия.
В настоящем раскрытии представлен способ локализации поражения, который, как показано на фиг. 1-15, включает в себя локализацию поражения 32 в организме путем локализации метки 31 на поверхности тела и использования при локализации блока получения изображения для локализации метки 31 таким образом, чтобы центральная линия 13 ультразвукового датчика 1 совпадала с меткой 31. Ультразвуковой датчик 1 совмещен с меткой 31, а именно совмещен с поражением 32. Блок получения изображения содержит ультразвуковой датчик 1 и по меньшей мере одну камеру 2, расположенную с одной или обеих сторон плоскости 11 секторного сканирования ультразвукового датчика 1 и зафиксирован на месте относительно ультразвукового датчика 1, а центральная линия 23 камеры 2 параллельна центральной линии 13 ультразвукового датчика 1. Способ локализации поражения предусматривает следующие этапы от S1 до С2.
На этапе S1 формируют эталонноеизображение4 (включая 41, 42) согласно данным, полученным в режиме реального времени камерой 2 (включая 21, 22), где эталонное изображение 4 имеет заданный размер, и на эталонном изображении 4 сформирована виртуальная точка 41 метки, соответствующая метке 31.
На этапе S2 определяют в соответствии с положением виртуальной точки 41 метки на эталонном изображении 4 и фактическим взаимным расположением камеры 2 и ультразвукового датчика 1, фактическую траекторию локализации, которая обеспечивает совпадение центральной линии 13 ультразвукового датчика 1 с меткой 31.
В соответствии со способом локализации поражения согласно настоящему раскрытию камера 2 используется для сбора данных камеры и формирования эталонного изображения 4, который помогает ультразвуковому датчику 1 в быстрой локализации положения метки 31 на эталонном изображении 4, и после того, как эталонное изображение 4 сформировано, локализация может быть завершена путем управления движением блока получения изображения в соответствии с эталонным изображением 4 без каких-либо ручных операций, что не только снижает сложность локализации, но также увеличивает эффективность локализации поражения и экономит время работы.
В некоторых вариантах осуществления формирование эталонного изображения 4 в соответствии с данными, полученными в режиме реального времени камерой 2 (S1), включает в себя следующие этапы S101-S103.
На этапе S101 вводят команду предварительной локализации, в соответствии с которой блок получения изображения перемещается в положение над меткой 31.
На этапе S103 оценивают, когда блок получения изображения выполняет команду предварительной локализации, содержит ли текущее изображение, полученное и сформированное камерой 2 в реальном времени, виртуальную точку 41 метки, соответствующую метке 31;
назначение, если текущее изображение содержит виртуальную точку метки, соответствующую метке, текущего изображения в качестве эталонного изображения 4 и текущего расстояние по высоте от ультразвукового датчика 1 до метки 31 в качестве высоты h2 предварительной локализации, и ввод, если текущее изображение не содержит точку виртуальной метки, соответствующую метке, повторный ввод команды предварительной локализации, пока не будет сформировано эталонное изображение 4.
В приведенном выше и последующих вариантах осуществления ультразвуковой датчик 1 представляет собой ультразвуковой датчик В-режима, а текущее расстояние по высоте может быть получено путем обработки ультразвуковых данных, полученных ультразвуковым датчиком В-режима. В ультразвуковом изображении, сформированном существующим ультразвуковым датчиком В-режима, текущее расстояние по высоте может быть считано напрямую, и когда текущая высота получена таким образом, диапазон захвата ультразвукового датчика должен покрывать точку метки, когда ультразвуковой датчик располагается на высоте предварительной локализации. По-видимому, в вариантах практического исполнения для получения текущего расстояния по высоте можно использовать другие устройства, но этот способ непосредственного получения текущего расстояния по высоте с помощью ультразвукового датчика 1 выгоден для упрощения устройства и снижения стоимости.
В некоторых вариантах осуществления расчет фактической траектории локализации (S2) дополнительно предусматривает следующий этап S201.
На этапе S201 ограничение в соответствии с высотой h2 предварительной локализации граничного условия движения блока получения изображения таким образом, чтобы ультразвуковой датчик 1 мог перемещаться в пределах заданной плоскости, где заданная плоскость представляет собой плоскость, перпендикулярную центральной линии 13 ультразвукового датчика 1 и соответствующую высоте предварительной локализации. С помощью этого режима, в котором сначала выполняется высокая предварительная локализация, а затем определяется диапазон передачи блока получения изображения, упрощается сложность расчета траектории движения, а эффективность локализации поражения значительно повышается.
В некоторых вариантах осуществления формирование эталонного изображения 4 (S1) включает следующий этап S102.
На этапе S102 устанавливают взаимосвязь пропорциональности изображения между текущим изображением и фактической областью захвата камеры 2 и формируют эталонное изображение 4 в соответствии с взаимосвязью пропорциональности изображения. Поскольку диапазон углов захвата камеры 2 является фиксированным параметром, когда камера 2 находится на высоте, относительно близкой к отметке 31, область захвата, соответствующая эталонному изображению 4, имеет относительно небольшую фактическую площадь, тогда как, когда камера 2 находится на высоте, относительно далекой относительно метки 31, область сбора данных, соответствующая эталонному изображению 4, имеет относительно большую фактическую площадь, что приводит к изменению пропорции изображения в зависимости от высоты предварительной локализации.
В вариантах практического осуществления, когда устанавливают взаимосвязь пропорциональности изображения, можно установить заданное значение высоты предварительной локализации и ввести команду предварительной локализации, чтобы высота предварительной локализации была равна заданному значению, и взаимосвязь пропорциональности являлась фиксированной величиной. Другими словами, перед определением фактической траектории локализации ультразвуковой датчик 1 перемещают в положение с фиксированной разностью высот относительно метки 31, что может помочь уменьшить объем расчетных данных и осуществить более быструю локализацию. По-видимому, в вариантах практического осуществления также можно создать расчетную модель взаимосвязи пропорциональности изображения, взяв в качестве переменной заданное значение высоты предварительной локализации, и рассчитать фактическую взаимосвязь пропорциональности изображения после получения значения высоты предварительной локализации.
В вариантах практического осуществления также возможно изменить положение установки камеры 2, чтобы часть контура 43 боковой кромки (см. фиг. 8 или 9) ультразвукового датчика 1 всегда присутствовала на текущем изображении, полученном с помощью камеры 2. Следовательно, при установлении взаимосвязи пропорциональности изображения взаимосвязь пропорциональности изображения может быть рассчитана на основе фактического расстояния от центральной линии камеры 2 до контура бокового края и эталонного расстояния на эталонном изображении 4.
Следующие варианты осуществления конкретно описывают, как рассчитать фактическую траекторию локализации:
В некоторых вариантах осуществления со ссылкой на фиг. 1-9, когда центральная линия 23 камеры 2 расположена на серединно-перпендикулярной плоскости 12 к плоскости 11 секторного сканирования ультразвукового датчика, когда формируется эталонное изображение 4, центральная линия 23 камеры 2 располагается в центре эталонного изображения 4 эталонное изображение 4 принимает проекцию серединно-перпендикулярной плоскости 12 к плоскости 11 ультразвукового секторного сканирования в качестве поперечной оси, а направление, перпендикулярное поперечной оси, в качестве продольного направления, и при этом условии, расчет фактической траектории локализации включает в себя следующий этап S202.
На этапе S202 рассчитывают фактическое поперечное смещение и фактическое продольное смещение, соответственно (включая следующие этапы S2021 и S2022).
На этапе S2021 выполняют расчет фактического продольного смещения, которое включает в себя следующие этапы S2021a-S2021b.
На этапе S2021a перемещают в соответствии с положением виртуальной точки 41 метки на эталонном изображении 4 виртуальную точку 41 метки до виртуального продольного смещения, необходимого для совпадения с поперечной осью.
На этапе S2021b рассчитывают фактическое продольное смещение в соответствии с виртуальным продольным смещением и взаимосвязью пропорциональности изображения.
В некоторых вариантах осуществления со ссылкой на фиг. 1-5 с представленной одной камерой 2 предусмотрен следующий этап:
на этапе S2022 рассчитывают фактическое поперечное смещение, что включает в себя следующие этапы S2022a-S2022b.
На этапе S2022a рассчитывают виртуальное поперечное смещение виртуальной точки 41 метки в соответствии с положением виртуальной точки 41 метки на эталонном изображении 4.
На этапе S2022a рассчитывают фактическое поперечное смещение в соответствии с виртуальным поперечным смещением и взаимосвязью пропорциональности изображения. В частности, формула расчета виртуального поперечного смещения представляет собой:
где L0 - составляющая виртуального поперечного смещения, а - межцентровое расстояние между ультразвуковым датчиком 1 и камерой 2, h1 - расстояние по высоте между ультразвуковым датчиком 1 и камерой 2, h2 - высота предварительной локализации, θ - угол обзора, соответствующий области захвата камеры 2 в поперечном направлении, а L - ширина обзора, соответствующая эталонному изображению 4 в поперечном направлении.
В вариантах практического осуществления плоскость 11 секторного сканирования ультразвукового датчика 1 может иметь без ограничения форму сектора.
В некоторых вариантах осуществления эталонную шкалу 42 с фиксированным положением и формой устанавливают в соответствии с эталонным изображением. Эталонная шкала 42 имеет соответствующие значения масштаба, которые преобразуются и отображаются как значения размера, соответствующие фактической области захвата камеры в соответствии с пропорцией изображения. На фиг. 5 эталонная шкала 42 объединена и является частью эталонного изображения 4, и эталонная шкала 42 не меняет положение при любом перемещении изображения в окне дисплея или изменяется в зависимости от пропорции изображения, так что по шкале 42 может визуально наблюдать фактическое поперечное смещение. Если высота h2 предварительной локализации задана как фиксированное значение, отображаемое значение масштаба является фиксированным значением, а эталонная шкала может быть сформирована на эталонном изображении или представлена на экране дисплея или любом другом устройстве для отображения эталонного изображения.
В других вариантах осуществления со ссылкой на фиг. 6-9, предусмотрены две камеры 2, включая первую камеру 21 и вторую камеру 22. Первая камера 21 и вторая камера 22 симметрично расположены по двум сторонам плоскости 11 секторного сканирования ультразвукового датчика 1, и имеют одинаковую разницу высот с ультразвуковым датчиком 1. Первая камера 21 получает данные и формирует первое эталонное изображение 4а (см. фиг. 8), а вторая камера 22 получает данные и формирует второе эталонное изображение 4b (см. фиг. 9), поэтому:
этап S2022 расчета фактического поперечного смещения предусматривает: расчет фактического поперечного смещения из положения виртуальной точки 41 метки на первом эталонном изображении 4а и положения виртуальной точки 41 метки на втором эталонном изображении 4b.
В частности, формула расчета фактического поперечного смещения представляет собой:
где у - составляющая фактического поперечного смещения, а - расстояние между центрами ультразвукового датчика 1 и каждой камеры 2, L1 - поперечное расстояние между виртуальной точкой 41 метки на первом эталонном изображении 4а и центром изображения; a L2 - поперечное расстояние между виртуальной точкой 41 метки на втором эталонном изображении 4b и центром изображения; каждое изображения, полученное первой камерой 21 и второй камерой 22, имеет угол θ обзора в поперечном направлении; и первое эталонное изображение 4а и второе эталонное изображение 4b имеют заданную ширину L изображения.
В других вариантах осуществления со ссылкой на фиг. 10-15 также предусмотрены две камеры 2, включая первую камеру 21 и вторую камеру 22, но первая камера 21 и вторая камера 22 расположены по двум сторонам плоскости 11 секторного сканирования ультразвукового датчика 1. По меньшей мере одна из первой камеры или второй камеры имеет центральную линию, отклоняющуюся от серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, и первая камера 21 и вторая камера 22 имеют одинаковую разность высот относительно ультразвукового датчика 1. Первая камера 21 получает данные и формирует первое эталонное изображение 4а, а вторая камера 22 получает данные и формирует второе эталонное изображение 4b, поэтому:
этап S202 расчета фактической траектории локализации включает в себя следующие этапы S2021-S2022.
На этапе S2021 рассчитывают виртуальное поперечное смещение и виртуальное продольное смещение в соответствии с положениями виртуальной точки 41 метки на первом эталонном изображении 4а (фиг. 14) и втором эталонном изображении 4b (фиг. 15).
На этапе S2022 рассчитывают фактическое поперечное смещение и фактическое продольное смещение в соответствии с виртуальным поперечным смещением, виртуальным продольным смещением и взаимосвязью пропорциональности изображения.
В этом способе первая камера 21 и вторая камера 22 расположены в гибких положениях относительно ультразвукового датчика 1, чтобы избежать использования других устройств и применять их в более широком диапазоне.
В частности, на этапе S2021 при расчете виртуального поперечного смещения и виртуального продольного смещения в качестве исходной точки берется виртуальная точка проекции центральной линии 13 ультразвукового датчика 1, линия проекции виртуального секторного сканирования плоскость 11 секторного сканирования ультразвукового датчика принимается за ось Y, а виртуальная серединно-перпендикулярная линия проекции серединно-перпендикулярной плоскости 12 к плоскости 11 секторного сканирования ультразвукового датчика принимается за ось X для установления системы координат, и в соответствии с положениями виртуальной точки 41 метки на первом эталонном изображении 4а и втором эталонном изображении 4b определяется набор формул расчета координат виртуальной точки 41 метки:


где координаты виртуальной точки 41 метки равны (x1, y1), θ1 - угол между виртуальной точкой 41 метки и плоскостью секторного сканирования ультразвукового датчика (соответствующей оси X) на первом эталонном изображении 4а, координатное положение первой камеры 21 равно (a1, b1), координатное положение второй камеры 22 равно (а2, b2), а θ2 - угол между виртуальной точкой 41 метки и плоскостью секторного сканирования ультразвукового датчика (соответствующей оси X) на втором эталонном изображении 4b.
В вариантах практического осуществления камеры могут быть разделены по меньшей мере на две группы камер, каждая из которых включает в себя одну или две камеры, фактическая траектория локализации, подлежащая проверке, формируется в соответствии с эталонным изображением, полученным и сформированным группой камер, а окончательная фактическая траектория локализации получается в соответствии по меньшей мере с двумя фактическими траекториями локализации, подлежащими проверке.
В частности, в некоторых вариантах осуществления предусмотрены по меньшей мере две камеры, включая первую камеру и вторую камеру, причем первая камера и вторая камера симметрично расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика, и каждая из них имеет центральную линию на серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика и одинаковую разность высот относительно ультразвукового датчика. При локализации поражения первая фактическая траектория локализации рассчитывается из соответствующего первого эталонного изображения или второго эталонного изображения, сформированного первой камерой или второй камерой, то есть определяется одной камерой; вторая фактическая траектория локализации рассчитывается из соответствующих эталонных изображений, сформированных первой камерой и второй камерой, то есть определяется двумя камерами, а затем окончательная фактическая траектория локализации определяется из первой фактической траектории локализации и второй фактической траектории локализации.
В других вариантах осуществления предусмотрены по меньшей мере две камеры, включая первую камеру и вторую камеру, причем первая камера и вторая камера расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика, центральная линия первой камеры расположена на серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, а центральная линия второй камеры отклоняется от серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, первая камера и вторая камера имеют одинаковую разницу высоты относительно ультразвукового датчика, и при локализации поражения первая фактическая траектория локализации рассчитывается на основе соответствующего эталонного изображения, сформированного первой камерой, вторая фактическая траектория локализации рассчитывается на основе соответствующих эталонных изображений, сформированных двумя камерами, а окончательная фактическая траектория локализации определяется из первой фактической траектории локализации и второй фактической траектории локализации.
В других вариантах осуществления предусмотрены по меньшей мере три камеры, в том числе первая камера, вторая камера и третья камера, причем первая камера и третья камера расположены на одной стороне плоскости секторного сканирования ультразвукового датчика, вторая камера расположена по другую сторону плоскости секторного сканирования ультразвукового датчика, центральная линия третьей камеры расположена на серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, а центральные линии первой камеры и второй камеры отклоняются от серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, первая камера, вторая камера и третья камера имеют одинаковую разность высот относительно ультразвукового датчика, и при локализации поражения, первая фактическая траектория локализации рассчитывается из соответствующего эталонного изображения, сформированного третьей камерой, вторая фактическая траектория локализации рассчитывается из соответствующего первого эталонного изображения и второго эталонного изображения, сформированных первой камерой и второй камерой, а окончательная фактическая траектория локализации определяется из первой фактической траектории локализации и второй фактической траектории локализации.
В других вариантах осуществления предусмотрены по меньшей мере четыре камеры, включая первую камеру, вторую камеру, третью камеру и четвертую камеру, причем первая камера и вторая камера симметрично расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика, и каждая из них имеет центральную линию на серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, тогда как третья камера и четвертая камера расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика, датчик, и каждый из них имеет центральную линию, отклоняющуюся от серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, первая фактическая траектория локализации рассчитывается из соответствующих эталонных изображений, сформированных первой камерой и второй камерой, вторая фактическая траектория локализации рассчитывается из соответствующих эталонных изображений, сформированных третьей камерой и четвертой камерой, а окончательная фактическая траектория локализации определяется из первой фактической траектории локализации и второй фактической траектории локализации.
В некоторых дополнительных вариантах осуществления предусмотрено по меньшей мере четыре камеры, включая первую камеру, вторую камеру, третью камеру и четвертую камеру, причем первая камера и вторая камера симметрично расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика, и каждая из них имеет центральную линию на серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, тогда как третья камера и четвертая камера расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика, и каждый из них имеет центральную линию, отклоняющуюся от серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, первая фактическая траектория локализации рассчитывается из соответствующих эталонных изображений, сформированных первой камерой и второй камерой, вторая фактическая траектория локализации рассчитывается из соответствующих эталонных изображений, сформированных третьей и четвертой камерами, третья фактическая траектория локализации рассчитывается из соответствующего эталонного изображения, сформированного первой камерой или второй камерой, а окончательная фактическая траектория локализации определяется из первой фактической траектории локализации, второй фактической траектории локализации и третьей фактической траектории локализации.
Когда окончательная фактическая траектория локализации определяется в соответствии с проверяемыми траекториями локализации (первой фактической траекторией локализации, второй фактической траекторией локализации или третьей фактической траекторией локализации), если значение разности любой проверяемой траектории локализации выше заданного порога, может быть подан аномальный предупредительный сигнал; и если значение разности каждой проверяемой траектории локализации меньше или равно предварительно установленному порогу, проверяемые траектории локализации усредняются для получения среднего значения, которое принимается в качестве окончательной фактической траектории локализации.
В приведенных выше вариантах осуществления фактическую траекторию локализации определяют посредством расчета, а затем движением ультразвукового датчика 1 и, таким образом, всего блока получения изображения управляют в соответствии с рассчитанной фактической траекторией локализации. В вариантах практического осуществления фактическую траекторию локализации можно не рассчитывать, и вместо этого центральная линия 13 ультразвукового датчика 1 объединяется с эталонным изображением 4 в качестве виртуальной точки проекции в соответствии с фактическим взаимным расположением между камерой 2 и ультразвуковым датчиком 1, затем в соответствии с взаимным расположением виртуальной точки 41 метки и виртуальной точки проекции на эталонном изображении 4 определяется направление движения, соответствующее совпадению виртуальной точки проекции и виртуальной точки 41 метки, и ультразвуковым датчиком 1 (то есть всем блоком получения изображения) управляют так, чтобы перемещать в соответствии с направлением движения до тех пор, пока виртуальная точка проекции и виртуальная точка 41 метки не совпадут друг с другом на эталонном изображении 4. Когда виртуальная точка проекции формируется путем объединения на эталонном изображении 4, центральная линия 23 камеры 2 соответствует центральному положению эталонного изображения на эталонном изображении 4, центральная линия 13 ультразвукового датчика 1 имеет ориентацию, соответствующую центральной линии камеры 2, и виртуальная точка проекции имеет направление, соответствующее виртуальной точке 41 метки, а ориентация центральной линии 13 ультразвукового датчика 1 и центральной линии камеры 2, а также расстояние между виртуальной точкой проекции и виртуальной точкой 41 метки определяются в соответствии с пропорцией изображения.
Соответственно, в настоящем изобретении дополнительно представлена система локализации поражения, которая определяет местонахождение поражения путем локализации метки 31 на поверхности тела. Подробный способ локализации поражения с помощью системы локализации поражения и полученный при этом эффект могут относиться к соответствующему описанию способа локализации поражения. Система локализации поражения согласно настоящему изобретению содержит:
блок получения изображения, содержащий ультразвуковой датчик 1 и по меньшей мере одну камеру 2, расположенную с одной или обеих сторон плоскости 11 секторного сканирования ультразвукового датчика 1 и зафиксированную на месте относительно ультразвукового датчика 1, а центральная линия 23 камеры 2 параллельна центральной линии 13 ультразвукового датчика 1;
устройство отображения эталонного изображения (не показано), выполненное с возможностью отображения эталонного изображения 4, причем эталонное изображение 4 формируется в соответствии с данными, полученными камерой 2 в режиме реального времени, эталонное изображение 4 имеет размер фиксированного значения, а на эталонном изображении 4 сформирована виртуальная точка 41 метки, соответствующая метке 31; и
процессор (не показан), содержащий блок расчета фактической траектории локализации, выполненный с возможностью расчета, в соответствии с положением виртуальной точки 41 метки на эталонном изображении 4 и фактическим взаимным расположением камеры 2 и ультразвукового датчика 1, фактической траектории локализации, обеспечивающей совпадение центральной линии 13 ультразвукового датчика 1 с меткой 31.
В вариантах практического осуществления процессор может быть процессором общего назначения, включая центральный процессор (CPU), сетевой процессор (NP) и т.п.; или может быть цифровым сигнальным процессором (DSP), специализированной интегральной схемой (ASIC), программируемой пользователем вентильной матрицей (FPGA) или любым другим программируемым логическим устройством, дискретным вентилем или транзисторным логическим устройством, или дискретным аппаратным компонентом.
В некоторых вариантах осуществления система локализации поражения дополнительно содержит:
блок ввода команды предварительной локализации, выполненный с возможностью ввода команды предварительной локализации, в соответствии с которой блок получения изображения перемещается в положение над меткой 31; и
исполнительный механизм, выполненный с возможностью приведения в движение блока получения изображения.
Процессор содержит блок обработки предварительной локализации, выполненный с возможностью управления исполнительным механизмом для перемещения в соответствии с командой предварительной локализации, оценки после того, как действие, соответствующее команде предварительной локализации, исполнительным механизмом завершено, содержит ли текущее изображение, полученное и сформированное камерой 2, виртуальную точку 41 метки, соответствующую метке 31, и приема, если текущее изображение содержит виртуальную точку 41 метки, соответствующую метке 31, текущего изображения в качестве эталонного изображения 4.
В некоторых вариантах осуществления блок расчета траектории фактической локализации имеет подблок расчета граничного условия движения для расчета граничного условия движения, и подблок расчета граничного условия движения выполнен с возможностью ограничения, в соответствии с высотой предварительной локализации, граничного условия движения блока получения изображения, чтобы ультразвуковой датчик 1 мог перемещаться в заданной плоскости. Заданная плоскость представляет собой плоскость, перпендикулярную центральной линии 13 ультразвукового датчика 1 и соответствующую высоте предварительной локализации.
В некоторых вариантах осуществления процессор дополнительно содержит блок формирования изображения, выполненный с возможностью: установления взаимосвязи пропорциональности изображения между текущим изображением и фактической областью захвата камеры 2 и формирования эталонного изображения 4 в соответствии с взаимосвязью пропорциональности изображения.
В вариантах практического осуществления, когда устанавливают взаимосвязь пропорциональности изображения, можно установить заданное значение высоты предварительной локализации и ввести команду предварительной локализации, чтобы высота предварительной локализации была равна заданному значению, а взаимосвязь пропорциональности являлась фиксированной величиной. Другими словами, перед определением фактической траектории локализации ультразвуковой датчик 1 перемещают в положение с фиксированной разностью высот относительно метки 31, что может помочь уменьшить объем расчетных данных и осуществить более быструю локализацию. По-видимому, в вариантах практического осуществления также можно создать расчетную модель взаимосвязи пропорциональности изображения, взяв в качестве переменной заданное значение высоты предварительной локализации, и рассчитать фактическую взаимосвязь пропорциональности изображения после получения значения высоты предварительной локализации.
В вариантах практического осуществления также возможно изменить положение установки камеры 2 таким образом, чтобы часть контура бокового края ультразвукового датчика 1 всегда присутствовала на текущем изображении, полученном камерой 2. Следовательно, при установлении взаимосвязи пропорциональности изображения, взаимосвязь пропорциональности изображения рассчитывается на основе фактического расстояния от центральной линии камеры 2 до контура бокового края и эталонного расстояния на эталонном изображении 4.
В некоторых вариантах осуществления осевая линия 23 камеры 2 расположена на серединно-перпендикулярной плоскости 12 к плоскости 11 секторного сканирования ультразвукового датчика, поэтому
Блок формирования изображения выполнен с возможностью: формирования эталонного изображения 4 таким образом, чтобы центральная линия 23 камеры 2 располагалась в центре эталонного изображения 4, эталонное изображение 4 принимает проекцию серединно-перпендикулярной плоскости 12 к плоскости 11 секторного ультразвукового сканирования в качестве поперечной оси, а направление, перпендикулярное поперечной оси, в качестве продольного направления; и
блок расчета фактической траектории локализации содержит подблок расчета фактического поперечного смещения и подблок расчета фактического продольного смещения, где подблок расчета фактического продольного смещения выполнен с возможностью: перемещения, в соответствии с положением виртуальной точки 41 метки на эталонном изображении 4, виртуальной точки 41 метки с виртуальным продольным смещением, для совмещения с поперечной осью, и расчета фактического продольного смещения в соответствии с виртуальным продольным смещением и взаимосвязью пропорциональности изображения.
В некоторых вариантах осуществления предусмотрена одна камера 2, а подблок расчета фактического поперечного смещения выполнен с возможностью: расчета виртуального поперечного смещения виртуальной точки 41 метки в соответствии с положением виртуальной точки 41 метки на эталонном изображении 4, и расчета фактического поперечного смещения в соответствии с виртуальным поперечным смещением и взаимосвязью пропорциональности изображения, причем формула расчета виртуального поперечного перемещения представляет собой:
где L0 - составляющая виртуального поперечного смещения, а - межцентровое расстояние между ультразвуковым датчиком 1 и камерой 2, h1 - расстояние по высоте между ультразвуковым датчиком 1 и камерой 2, h2 - высота предварительной локализации, θ - угол обзора, соответствующий области захвата камеры 2 в поперечном направлении, а L - ширина обзора, соответствующая эталонному изображению 4 в поперечном направлении.
В некоторых вариантах осуществления со ссылкой на фиг. 5 эталонная шкала с фиксированным положением и формой предоставлена на эталонном изображении 4, а эталонная шкала 42 имеет соответствующие значения масштаба, которые преобразуются и отображаются как значения размера, соответствующие фактической области захвата камеры в соответствии с пропорцией изображения. В вариантах практического осуществления эталонная шкала может быть предоставлена на устройстве отображения эталонного изображения.
В некоторых вариантах осуществления предусмотрены две камеры 2, включая первую камеру 21 и вторую камеру 22. Первая камера 21 и вторая камера 22 симметрично расположены по двум сторонам плоскости 11 секторного сканирования ультразвукового датчика 1, и имеют одинаковую разницу по высоте с ультразвуковым датчиком 1.
Блок формирования изображения выполнен с возможностью: формирования первого эталонного изображения 4а из данных, полученных первой камерой 21, и формирования второго эталонного изображения 4b из данных, полученных второй камерой 22; и
подблок расчета фактического поперечного смещения выполнен с возможностью: расчета фактического поперечного смещения из положения виртуальной точки 41 метки на первом эталонном изображении 4а и положения виртуальной точки 41 метки на втором эталонном изображении 4b, причем формула расчета фактического поперечного смещения представляет собой:
где у - составляющая фактического поперечного смещения, а - расстояние между центрами ультразвукового датчика 1 и каждой камеры 2, L1 - поперечное расстояние между виртуальной точкой 41 метки на первом эталонном изображении 4а и центром изображения; a L2 - поперечное расстояние между виртуальной точкой 41 метки на втором эталонном изображении 4b и центром изображения; каждое изображение, полученное первой камерой 21 и второй камерой 22, имеет угол θ обзора в поперечном направлении; и первое эталонное изображение 4а и второе эталонное изображение 4b имеют заданную ширину L изображения.
В некоторых вариантах осуществления предусмотрены две камеры 2, включая первую камеру 21 и вторую камеру 22. Первая камера 21 и вторая камера 22 расположены по двум сторонам плоскости 11 секторного сканирования ультразвукового датчика 1, по меньшей мере одна из первой камеры или второй камеры имеет центральную линию, отклоняющуюся от серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, и первая камера 21 и вторая камера 22 имеют одинаковую разность высот относительно ультразвукового датчика 1. В это время первая камера 21 и вторая камера 22 расположены в гибких положениях относительно ультразвукового датчика 1, чтобы избежать использования других устройств, с возможностью применения в более широком диапазоне.
В это время блок формирования изображения выполнен с возможностью: формирования первого эталонного изображения 4а из данных, полученных первой камерой 21, и формирования второго эталонного изображения 4b из данных, полученных второй камерой 22; и
блок расчета траектории фактической локализации выполнен с возможностью: расчета виртуального поперечного смещения и виртуального продольного смещения в соответствии с положениями виртуальной точки 41 метки на первом эталонном изображении 4а и втором эталонном изображении 4b; и расчета фактического поперечного смещения и фактического продольного смещения в соответствии с виртуальным поперечным смещением, виртуальным продольным смещением и взаимосвязью пропорциональности изображения.
При расчете виртуального поперечного смещения и виртуального продольного смещения за начало отсчета принимается виртуальная точка проекции центральной линии ультразвукового датчика 1, линию проекции виртуального секторного сканирования плоскости 11 секторного сканирования ультразвукового датчика принимают за ось Y, а виртуальную среднеперпендикулярную линию проекции серединно-перпендикулярной плоскости 12 к плоскости 11 секторного сканирования ультразвукового датчика принимают за ось X для установления системы координат, и в соответствии с положениями виртуальной точки 41 метки на первом эталонном изображении 4а и втором эталонном изображении 4b определяют набор формул расчета координат виртуальной точки 41 метки:


где координаты виртуальной точки 41 метки равны (x1, y1), θ1 - угол между виртуальной точкой 41 метки и плоскостью секторного сканирования ультразвукового датчика (соответствующей оси X) на первом эталонном изображении 4а, координатное положение первой камеры 21 равно (a1, b2), координатное положение второй камеры 22 равно (а2, b2), а θ2 - угол между виртуальной точкой 41 метки и плоскостью секторного сканирования ультразвукового датчика (соответствующей оси X) на втором эталонном изображении 4b.
В некоторых вариантах осуществления система локализации поражения снабжена несколькими группами камер, каждая из которых включает в себя одну или две камеры, каждый блок расчета фактической траектории локализации получает фактическую траекторию локализации, которая должна быть проверена в соответствии с одной группой камер, и процессор дополнительно содержит блок проверки, выполненный с возможностью получения окончательной фактической траектории локализации в соответствии по меньшей мере с двумя фактическими траекториями локализации, подлежащими проверке.
В некоторых вариантах осуществления процессор дополнительно выполнен с возможностью:
соединения, в соответствии с фактическим взаимным расположением камеры и ультразвукового датчика, центральной линии ультразвукового датчика на эталонном изображении в качестве виртуальной точки проекции; и
определения фактической траектории локализации, включая: определение в соответствии с взаимным расположением виртуальной точки метки и виртуальной точки проекции на эталонном изображении, направление движения, соответствующего совпадению виртуальной точки проекции и виртуальной точки метки, и управление движением ультразвукового датчика в соответствии с направлением движения до тех пор, пока виртуальная точка проекции и виртуальная точка метки не совпадут друг с другом на эталонном изображении.
Следует понимать, что порядковые номера этапов в вышеизложенных вариантах осуществления не подразумевают порядок выполнения, и порядок выполнения каждого процесса должен определяться их функциями и присущей им логикой и не должен накладывать никаких ограничений на процесс реализации вариантов осуществления настоящего раскрытия.
Вышеприведенные варианты осуществления предназначены только для иллюстрации принципов и полезности настоящего раскрытия, но не предназначены для ограничения настоящего раскрытия. Специалисты в данной области техники могут модифицировать или изменить приведенные выше варианты осуществления, не выходя за рамки сущности и объема настоящего изобретения, соответственно, подразумевается, что все эквивалентные модификации или изменения, которые могут быть сделаны специалистами в данной области без отклонения от сущности и объема настоящего изобретения, охватываются прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ локализации и построения навигационных карт мобильного сервисного робота | 2020 |
|
RU2740229C1 |
| Способ калибровки лазерного сканера, предназначенного для оценки качества поверхности сварного шва | 2023 |
|
RU2821171C1 |
| СПОСОБ ЛОКАЛИЗАЦИИ РОБОТА В ПЛОСКОСТИ ЛОКАЛИЗАЦИИ | 2015 |
|
RU2662913C2 |
| Способ и система автоматизированного моделирования ортотика | 2021 |
|
RU2758752C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ОРИЕНТАЦИИ УСТРОЙСТВА ПОЛЬЗОВАТЕЛЯ С ПРИВЯЗКОЙ К ВИЗУАЛЬНЫМ ОСОБЕННОСТЯМ ОКРУЖЕНИЯ | 2022 |
|
RU2828682C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЭЛЕКТРОСВАРНЫХ ТРУБ РАЗЛИЧНОГО ДИАМЕТРА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2655012C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДЛИНЫ ГЛАЗА У ПАЦИЕНТОВ СО ЗРЕЛОЙ КАТАРАКТОЙ | 2015 |
|
RU2577235C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ИДЕНТИФИКАЦИИ ПРОДУКЦИИ | 2011 |
|
RU2574806C2 |
| УСТРОЙСТВО ЭКСТРАКОРПОРАЛЬНОГО ЛЕЧЕНИЯ СФОКУСИРОВАННЫМ УЛЬТРАЗВУКОМ ЗАБОЛЕВАНИЙ ОРГАНОВ ТАЗА | 2018 |
|
RU2741721C1 |
| СПОСОБ ЛОКАЛИЗАЦИИ ОБОРУДОВАНИЯ В ТЕЛЕКОММУНИКАЦИОННОЙ СТОЙКЕ | 2021 |
|
RU2776095C1 |
Группа изобретений относится к технической области лечения ультразвуком и, в частности, относится к способу локализации поражения и системе локализации поражения. Предложены способ локализации поражения и система локализации поражения. Способ локализации поражения предусматривает: локализацию поражения путем локализации метки на поверхности тела; использование камеры для локализации в помощь ультразвуковому датчику для локализации; формирование эталонного изображения по данным, полученным в режиме реального времени камерой, где эталонное изображение имеет заданный размер и формируется виртуальная точка метки, соответствующая метке на эталонном изображении; и определение в соответствии с положением виртуальной точки метки на эталонном изображении и фактическим взаимным расположением камеры и ультразвукового датчика фактической траектории локализации, которая обеспечивает совпадение центральной линии ультразвукового датчика с меткой. В соответствии со способом локализации поражения камера выполнена с возможностью сбора данных камеры для формирования эталонного изображения, а затем помогает ультразвуковому датчику определить местонахождение с помощью эталонного изображения, что может уменьшить сложность локализации с повышением эффективности и экономии времени операции. Группа изобретений обеспечивает повышение надежности и ускорение локализации поражения. 2 н. и 19 з.п. ф-лы, 15 ил.
1. Способ локализации поражения, отличающийся локализацией поражения путем локализации метки на поверхности тела, причем поражение включает патологическое изменение поверхности кожи и подкожное патологическое изменение; использованием при локализации блока получения изображения для локализации метки, при этом блок получения изображения содержит ультразвуковой датчик и по меньшей мере одну камеру, причем если камера одна, то она расположена с одной стороны ультразвукового датчика, а если камер больше, то они расположены с обеих сторон плоскости секторного сканирования ультразвукового датчика, по меньшей мере одна камера закреплена на месте относительно ультразвукового датчика и центральная линия по меньшей мере одной камеры параллельна центральной линии ультразвукового датчика, а способ локализации поражения предусматривает:
формирование эталонного изображения в соответствии с данными, полученными по меньшей мере одной камерой в режиме реального времени, при этом эталонное изображение имеет размер, равный величине, определенной заранее, а на эталонном изображении формируется виртуальная точка метки, соответствующая метке; и
определение в соответствии с положением виртуальной точки метки на эталонном изображении и фактическим взаимным расположением по меньшей мере одной камеры и ультразвукового датчика фактической траектории локализации, которая обеспечивает совпадение центральной линии ультразвукового датчика с меткой; перед определением фактической траектории локализации ультразвуковой датчик перемещают в положение с фиксированной разностью высот относительно метки; при этом модель расчета пропорционального соотношения формирования изображения устанавливается путем принятия значения высоты предварительной локализации в качестве переменной и фактическая взаимосвязь пропорциональности изображения рассчитывается после получения значения высоты предварительной локации;
если фактическая траектория локализации рассчитывается на основе эталонного изображения, сформированного одной камерой, а расчет фактического поперечного смещения предусматривает: расчет виртуального поперечного смещения виртуальной точки метки в соответствии с положением виртуальной точки метки на эталонном изображении и расчет фактического поперечного смещения в соответствии с виртуальным поперечным смещением и взаимосвязью пропорциональности изображения, при этом формула расчета виртуального поперечного смещения представляет собой
где L0 - составляющая виртуального поперечного смещения, а - межцентровое расстояние между ультразвуковым датчиком и камерой, h1 - расстояние по высоте между ультразвуковым датчиком и камерой, h2 - высота предварительной локализации, θ - угол обзора, соответствующий области захвата камеры в поперечном направлении, a L - ширина обзора, соответствующая эталонному изображению в поперечном направлении;
если по меньшей мере две камеры обеспечены и включают первую камеру и вторую камеру и фактическая траектория локализации рассчитывается на основе соответствующих эталонных изображений, сформированных двумя камерами, и при расчете виртуального поперечного смещения и виртуального продольного смещения за начало отсчета принимается виртуальная точка проекции центральной линии ультразвукового датчика, виртуальная линия проекции секторного сканирования плоскости секторного сканирования ультразвукового датчика принимается в качестве оси Y, а виртуальная серединно-перпендикулярная линия проекции серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика принимается в качестве оси X для установления системы координат, и в соответствии с положениями виртуальной точки метки на первом эталонном изображении и втором эталонном изображении определяется набор формул расчета координат виртуальной точки метки:
где координаты виртуальной точки 41 метки равны (x1, y1), θ1 - угол между виртуальной точкой 41 метки и плоскостью секторного сканирования ультразвукового датчика (соответствующей оси X) на первом эталонном изображении 4а, координатное положение первой камеры 21 равно (a1, b1), координатное положение второй камеры 22 равно (а2, b2), а θ2 - угол между виртуальной точкой 41 метки и плоскостью секторного сканирования ультразвукового датчика (соответствующей оси X) на втором эталонном изображении 4.
2. Способ локализации поражения по п. 1, отличающийся тем, что формирование эталонного изображения по данным, полученным камерой в режиме реального времени, предусматривает:
ввод команды предварительной локализации, в соответствии с которой блок получения изображения перемещается в положение над меткой;
оценку, когда блок получения изображения выполняет команду предварительной локализации, содержит ли текущее изображение, полученное и сформированное камерой в режиме реального времени, виртуальную точку метки, соответствующую метке;
назначение, если текущее изображение содержит виртуальную точку метки, соответствующую метке, текущего изображения в качестве эталонного изображения и текущего расстояния по высоте от ультразвукового датчика до метки в качестве высоты предварительной локализации и повторный ввод, если текущее изображение не содержит виртуальной точки метки, соответствующей метке, команды предварительной локализации, пока не будет сформировано эталонное изображение.
3. Способ локализации поражения по п. 2, отличающийся тем, что расчет фактической траектории локализации дополнительно предусматривает
ограничение, в соответствии с высотой предварительной локализации, граничного условия движения блока получения изображения, чтобы ультразвуковой датчик мог перемещаться в пределах плоскости, определенной заранее, при этом данная плоскость представляет собой плоскость, перпендикулярную центральной линии ультразвукового датчика и соответствующую высоте предварительной локализации.
4. Способ локализации поражения по п. 2, отличающийся тем, что формирование эталонного изображения предусматривает: установление взаимосвязи пропорциональности изображения между текущим изображением и фактической областью захвата камеры и формирование эталонного изображения в соответствии с взаимосвязью пропорциональности изображения;
установку начального значения высоты предварительной локализации и ввод команды предварительной локализации таким образом, чтобы высота предварительной локализации была равна начальному значению, а взаимосвязь пропорциональности имела фиксированное значение;
или
назначение положения установки камеры таким образом, чтобы часть контура бокового края ультразвукового датчика всегда присутствовала на текущем изображении, полученном камерой, и расчет, при установлении взаимосвязи пропорциональности изображения, взаимосвязи пропорциональности изображения на основе фактического расстояния от центральной линии камеры до контура бокового края и эталонного расстояния на эталонном изображении.
5. Способ локализации поражения по п. 4, отличающийся тем, что при расположении центральной линии камеры на серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика и формировании эталонного изображения центральная линия камеры расположена в центре эталонного изображения, эталонное изображение принимает проекцию серединно-перпендикулярной плоскости к плоскости секторного ультразвукового сканирования в качестве поперечной оси, а направление, перпендикулярное поперечной оси, в качестве продольного направления, причем расчет фактической траектории локализации предусматривает расчет фактического поперечного смещения и фактического продольного смещения, соответственно, при этом расчет фактического продольного смещения предусматривает:
перемещение, в соответствии с положением виртуальной точки метки на эталонном изображении, виртуальной точки метки до виртуального продольного смещения, нужного для совпадения с поперечной осью, и
расчет фактического продольного смещения в соответствии с виртуальным продольным смещением и взаимосвязью пропорциональности изображения.
6. Способ локализации поражения по п. 5, отличающийся тем, что предусмотрены по меньшей мере две камеры, в том числе первая камера и вторая камера, при этом фактическая траектория локализации рассчитывается на основе соответствующих эталонных изображений, сформированных двумя камерами, причем первая камера и вторая камера симметрично расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика и имеют одинаковую разницу высот с ультразвуковым датчиком, первая камера получает данные и формирует первое эталонное изображение, а вторая камера получает данные и формирует второе эталонное изображение;
расчет фактического поперечного смещения включает расчет фактического поперечного смещения из положения виртуальной точки метки на первом эталонном изображении и положения виртуальной точки метки на втором эталонном изображении, при этом формула расчета фактического поперечного смещения представляет собой
 ,
,
где у - составляющая фактического поперечного смещения, а - межцентровое расстояние между ультразвуковым датчиком и каждой камерой, L1 - поперечное расстояние между виртуальной точкой метки на первом эталонном изображении и центром изображения; a L2 - поперечное расстояние между виртуальной точкой метки на втором эталонном изображении и центром изображения; каждое из изображений, полученных первой камерой и второй камерой, имеет угол θ обзора в поперечном направлении; и первое эталонное изображение и второе эталонное изображение имеют ширину L изображения, определенную заранее.
7. Способ локализации поражения по п. 4, отличающийся тем, что предусмотрены по меньшей мере две камеры, в том числе первая камера и вторая камера, при этом фактическая траектория локализации рассчитывается из соответствующих эталонных изображений, сформированных двумя камерами, причем первая камера и вторая камера расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика, по меньшей мере одна из первой камеры или второй камеры имеет центральную линию, отклоняющуюся от серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, и первая камера и вторая камера имеют одинаковую разницу высот относительно ультразвукового датчика, первая камера получает данные и формирует первое эталонное изображение, а вторая камера получает данные и формирует второе эталонное изображение, и расчет фактической траектории локализации предусматривает: расчет виртуального поперечного смещения и виртуального продольного смещения в соответствии с положениями виртуальной точки метки на первом эталонном изображении и втором эталонном изображении; и расчет фактического поперечного смещения и фактического продольного смещения в соответствии с виртуальным поперечным смещением, виртуальным продольным смещением и взаимосвязью пропорциональности изображения.
8. Способ локализации поражения по любому из пп. 1-7, отличающийся тем, что эталонная шкала с фиксированным положением и формой устанавливается в соответствии с эталонным изображением, при этом эталонная шкала имеет соответствующие значения шкалы, которые преобразуются и отображаются как значения размера, соответствующие фактической области захвата камеры в соответствии с пропорцией изображения.
9. Способ локализации поражения по п. 4, отличающийся тем, что камеры разделяют по меньшей мере на две группы камер, каждая из которых включает в себя одну или две камеры, а фактическую траекторию локализации, подлежащую проверке, формируют в соответствии с полученным и сформированным эталонным изображением с помощью группы камер, и окончательная фактическая траектория локализации получается в соответствии по меньшей мере с двумя фактическими траекториями локализации, подлежащими проверке, при этом:
предусмотрены по меньшей мере две камеры, в том числе первая камера и вторая камера, при этом первая камера и вторая камера расположены симметрично по двум сторонам плоскости секторного сканирования ультразвукового датчика, и каждая из них имеет центральную линию на серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика и одинаковую разность высот относительно ультразвукового датчика, и при локализации поражения первая фактическая траектория локализации рассчитывается из соответствующего эталонного изображения, сформированного первой камерой или второй камерой, вторая фактическая траектория локализации рассчитывается из соответствующих эталонных изображений, сформированных первой камерой и второй камерой, и конечная фактическая траектория локализации определяется из первой фактической траектории локализации и второй фактической траектории локализации;
или
предусмотрены по меньшей мере две камеры, в том числе первая камера и вторая камера, при этом первая камера и вторая камера расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика, центральная линия первой камеры расположена на серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, а центральная линия второй камеры отклоняется от серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, первая камера и вторая камера имеют одинаковую разность высот относительно ультразвукового датчика, и при локализации поражения первая фактическая траектория локализации рассчитывается на основе соответствующего эталонного изображения, сформированного первой камерой, вторая фактическая траектория локализации рассчитывается на основе соответствующих эталонных изображений, сформированных двумя камерами, а окончательная фактическая траектория локализации определяется из первой фактической траектории локализации и второй фактической траектории локализации;
или
предусмотрено по меньшей мере три камеры, включая первую камеру, вторую камеру и третью камеру, при этом первая камера и третья камера расположены по одну сторону от плоскости секторного сканирования ультразвукового датчика, вторая камера расположена с другой стороны плоскости секторного сканирования ультразвукового датчика, центральная линия третьей камеры расположена на серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, а центральные линии первой камеры и второй камеры отклоняются от серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, первая камера, вторая камера и третья камера имеют одинаковую разность высот относительно ультразвукового датчика, и при локализации поражения первая фактическая траектория локализации рассчитывается из соответствующего эталонного изображения, сформированного третьей камерой, вторая фактическая траектория локализации рассчитывается из соответствующих эталонных изображений, сформированных первой камерой и второй камерой, а окончательная фактическая траектория локализации определяется из первой фактической траектории локализации и второй фактической траектории локализации;
или
предусмотрено по меньшей мере четыре камеры, включая первую камеру, вторую камеру, третью камеру и четвертую камеру, при этом первая камера и вторая камера симметрично расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика, и каждая имеет центральную линию на серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, причем третья камера и четвертая камера расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика и каждая имеет центральную линию, отклоняющуюся от серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, первая фактическая траектория локализации рассчитывается из соответствующих эталонных изображений, сформированных первой и второй камерами, вторая фактическая траектории локализации рассчитывается из соответствующих эталонных изображений, сформированных третьей и четвертой камерами, а окончательная фактическая траектория локализации определяется из первой фактической траектории локализации и второй фактической траектории локализации;
или
предусмотрено по меньшей мере четыре камеры, включая первую камеру, вторую камеру, третью камеру и четвертую камеру, при этом первая камера и вторая камера симметрично расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика и каждая имеет центральную линию на серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, причем третья камера и четвертая камера расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика и каждая имеет центральную линию, отклоняющуюся от серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, первая фактическая траектория локализации рассчитывается из соответствующих эталонных изображений, сформированных первой и второй камерами, вторая фактическая траектории локализации рассчитывается из соответствующих эталонных изображений, сформированных третьей и четвертой камерами, третья фактическая траектория локализации рассчитывается из соответствующего эталонного изображения, сформированного первой камерой или второй камерой, а окончательная фактическая траектория локализации определяется из первой фактической траектории локализации, второй фактической траектории локализации и третьей фактической траектории локализации.
10. Способ локализации поражения по п. 4, отличающийся тем, что дополнительно предусматривает:
слияние, в соответствии с фактическим взаимным расположением камеры и ультразвукового датчика, центральной линии ультразвукового датчика на эталонном изображении в качестве виртуальной точки проекции, и
определение фактической траектории локализации, предусматривающее: определение в соответствии с взаимным расположением виртуальной точки метки и виртуальной точки проекции на эталонном изображении направления движения, соответствующего совпадению виртуальной точки проекции и виртуальной точки метки, и управление движением ультразвукового датчика в соответствии с направлением движения до тех пор, пока виртуальная точка проекции и виртуальная точка метки не совпадут друг с другом на эталонном изображении.
11. Система локализации поражения, отличающаяся локализацией поражения путем локализации метки на поверхности тела, причем поражение включает патологическое изменение поверхности кожи и подкожное патологическое изменение; и содержащая:
блок получения изображения, содержащий ультразвуковой датчик и по меньшей мере одну камеру, причем если камера одна, то она расположена с одной стороны ультразвукового датчика, а если камер больше, то они расположены с обеих сторон плоскости секторного сканирования ультразвукового датчика и зафиксированы на месте относительно ультразвукового датчика, при этом центральная линия камеры параллельна центральной линии ультразвукового датчика;
устройство отображения эталонного изображения, выполненное с возможностью отображения эталонного изображения, при этом эталонное изображение формируется в соответствии с данными, полученными камерой в режиме реального времени, эталонное изображение имеет размер фиксированного значения, а на эталонном изображении сформирована виртуальная точка метки, соответствующая метке; и
процессор, содержащий блок расчета фактической траектории локализации, выполненный с возможностью расчета, в соответствии с положением виртуальной точки метки на эталонном изображении и фактическим взаимным расположением камеры и ультразвукового датчика, фактической траектории локализации, которая обеспечивает совпадение центральной линии ультразвукового датчика с меткой.
12. Система локализации поражения по п. 11, отличающаяся тем, что дополнительно содержит:
блок ввода команды предварительной локализации, выполненный с возможностью ввода команды предварительной локализации, в соответствии с которой блок получения изображения перемещается в положение над меткой; и
исполнительный механизм, выполненный с возможностью приведения в движение блока получения изображения;
при этом процессор содержит блок обработки предварительной локализации, выполненный с возможностью управления исполнительным механизмом для перемещения в соответствии с командой предварительной локализации, оценки после выполнения исполнительным механизмом действия, соответствующего команде предварительной локализации, содержит ли текущее изображение, полученное и сформированное камерой, виртуальную точку метки, соответствующую метке, и назначения, если текущее изображение содержит виртуальную точку метки, соответствующую метке, текущего изображения в качестве эталонного изображения.
13. Система локализации поражения по п. 12, отличающаяся тем, что блок расчета траектории фактической локализации имеет подблок расчета граничного условия движения для расчета граничного условия движения и подблок расчета граничного условия движения выполнен с возможностью ограничения в соответствии с высотой предварительной локализации граничного условия движения блока получения изображения, чтобы ультразвуковой датчик мог перемещаться в пределах плоскости, определенной заранее, при этом данная плоскость представляет собой плоскость, перпендикулярную центральной линии ультразвукового датчика и соответствующую высоте предварительной локализации.
14. Система локализации поражения по п. 12, отличающаяся тем, что процессор дополнительно содержит блок формирования изображения, выполненный с возможностью: установления взаимосвязи пропорциональности изображения между текущим изображением и фактической областью захвата камеры и формирования эталонного изображения в соответствии с взаимосвязью пропорциональности изображения;
установки начального значения высоты предварительной локализации и ввода команды предварительной локализации, чтобы высота предварительной локализации была равна начальному значению, а взаимосвязь пропорциональности имела фиксированное значение;
или
создания модели расчета взаимосвязи пропорциональности изображения, принимая начальное значение высоты предварительной локализации в качестве переменной, и расчета фактической взаимосвязи пропорциональности изображения после получения значения высоты предварительной локализации;
или
назначения положения установки камеры таким образом, чтобы часть контура бокового края ультразвукового датчика всегда присутствовала на текущем изображении, полученном камерой, и расчета, при установлении взаимосвязи пропорциональности изображения, взаимосвязи пропорциональности изображения на основе фактического расстояния от центральной линии камеры до контура бокового края и эталонного расстояния на эталонном изображении.
15. Система локализации поражения по п. 14, отличающаяся тем, что центральная линия камеры расположена на серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, поэтому
блок формирования изображения выполнен с возможностью: формирования эталонного изображения таким образом, чтобы центральная линия камеры располагалась в центре эталонного изображения, при этом эталонное изображение принимает проекцию серединно-перпендикулярной плоскости к плоскости секторного ультразвукового сканирования в качестве поперечной оси, а направление, перпендикулярное поперечной оси, в качестве продольного направления; и
блок расчета фактической траектории локализации содержит подблок расчета фактического поперечного смещения и подблок расчета фактического продольного смещения, при этом подблок расчета фактического продольного смещения выполнен с возможностью: перемещения, в соответствии с положением виртуальной точки метки на эталонном изображении, виртуальной точки метки с продольным смещением, необходимым для совпадения с поперечной осью, и расчета фактического продольного смещения в соответствии с виртуальным продольным смещением и взаимосвязью пропорциональности изображения.
16. Система локализации поражения по п. 15, отличающаяся тем, что предусмотрена одна камера, а подблок расчета фактического поперечного смещения выполнен с возможностью: расчета виртуального поперечного смещения виртуальной точки метки в соответствии с положением виртуальной точки метки на эталонном изображении и расчета фактического поперечного смещения в соответствии с виртуальным поперечным смещением и взаимосвязью пропорциональности изображения, при этом
формула расчета виртуального поперечного перемещения представляет собой
где L0 - составляющая виртуального поперечного смещения, а - межцентровое расстояние между ультразвуковым датчиком и камерой, h1 - расстояние по высоте между ультразвуковым датчиком и камерой, h2 - высота предварительной локализации, θ - угол обзора, соответствующий области захвата камеры в поперечном направлении, a L - ширина обзора, соответствующая эталонному изображению в поперечном направлении.
17. Система локализации поражения по п. 16, отличающаяся тем, что: предусмотрены две камеры, включая первую камеру и вторую камеру, при этом первая камера и вторая камера симметрично расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика и имеют одинаковую разницу по высоте с ультразвуковым датчиком;
блок формирования изображения выполнен с возможностью формирования первого эталонного изображения из данных, полученных первой камерой, и формирования второго эталонного изображения из данных, полученных второй камерой; и
подблок расчета фактического поперечного смещения выполнен с возможностью расчета фактического поперечного смещения из положения виртуальной точки метки на первом эталонном изображении и положения виртуальной точки метки на втором эталонном изображении, при этом формула расчета фактического поперечного смещения представляет собой
 ,
,
где у - составляющая фактического поперечного смещения, а - межцентровое расстояние между ультразвуковым датчиком и каждой камерой, L1 - поперечное расстояние между виртуальной точкой метки на первом эталонном изображении и центром изображения; a L2 - поперечное расстояние между виртуальной точкой метки на втором эталонном изображении и центром изображения; каждое из изображений, полученных первой камерой и второй камерой, имеет угол θ обзора в поперечном направлении; и первое эталонное изображение и второе эталонное изображение имеют ширину L изображения, определенную заранее.
18. Система локализации поражения по п. 14, отличающаяся тем, что: предусмотрены две камеры, включая первую камеру и вторую камеру, при этом первая камера и вторая камера расположены по двум сторонам плоскости секторного сканирования ультразвукового датчика, по меньшей мере одна из первой камеры или второй камеры имеет центральную линию, отклоняющуюся от серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика, и первая камера и вторая камера имеют одинаковую разность высот относительно ультразвукового датчика;
блок формирования изображения выполнен с возможностью: формирования первого эталонного изображения из данных, полученных первой камерой, и формирования второго эталонного изображения из данных, полученных второй камерой; и
блок расчета траектории фактической локализации выполнен с возможностью: расчета виртуального поперечного смещения и виртуального продольного смещения в соответствии с положениями виртуальной точки метки на первом эталонном изображении и втором эталонном изображении; и расчета фактического поперечного смещения и фактического продольного смещения в соответствии с виртуальным поперечным смещением, виртуальным продольным смещением и взаимосвязью пропорциональности изображения; причем
при расчете виртуального поперечного смещения и виртуального продольного смещения за начало отсчета принимается виртуальная точка проекции центральной линии ультразвукового датчика, виртуальная линия проекции секторного сканирования плоскости секторного сканирования ультразвукового датчика принимается в качестве оси Y, а виртуальная серединно-перпендикулярная линия проекции серединно-перпендикулярной плоскости к плоскости секторного сканирования ультразвукового датчика принимается в качестве оси X для установления системы координат, и в соответствии с положениями виртуальной точки метки на первом эталонном изображении и втором эталонном изображении определяется набор формул расчета координат виртуальной точки метки:
где координаты виртуальной точки метки равны (x1, y1), на первом эталонном изображении, θ1 - угол обзора области захвата первой камеры в направлении ширины, соответствующем оси X, координатное положение первой камеры (a1, b1), координатное положение второй камеры (а2, b2), а θ2 - угол обзора области захвата второй камеры в направлении ширины, соответствующем оси X.
19. Система локализации поражения по любому из пп. 11-18, отличающаяся тем, что на эталонном изображении или на устройстве отображения эталонного изображения предусмотрена эталонная шкала, эталонная шкала имеет соответствующие значения масштаба, которые преобразуются и отображаются как значения размера, соответствующие фактической области захвата камеры в соответствии с пропорцией изображения.
20. Система локализации поражения по п. 14, отличающаяся тем, что система локализации поражения снабжена по меньшей мере двумя группами камер, каждая из которых включает в себя одну или две камеры, каждый блок расчета фактической траектории локализации получает фактическую траекторию локализации, подлежащую проверке в соответствии с одной группой камер, а процессор дополнительно содержит блок проверки, выполненный с возможностью получения окончательной фактической траектории локализации в соответствии по меньшей мере с двумя фактическими траекториями локализации, подлежащими проверке.
21. Система локализации поражения по п. 14, отличающаяся тем, что процессор дополнительно выполнен с возможностью:
объединения, в соответствии с фактическим взаимным положением камеры и ультразвукового датчика, центральной линии ультразвукового датчика на эталонном изображении в качестве виртуальной точки проекции, и
определения фактической траектории локализации, предусматривающего: определение в соответствии с взаимным расположением виртуальной точки метки и виртуальной точки проекции на эталонном изображении направления движения, соответствующего совпадению виртуальной точки проекции и виртуальной точки метки, и управление движением ультразвукового датчика в соответствии с направлением движения до тех пор, пока виртуальная точка проекции и виртуальная точка метки не совпадут друг с другом на эталонном изображении.
| CN 110192894 A 03.09.2019 | |||
| US 2002065461 A1 30.05.2002 | |||
| US 2004215072 A1 28.10.2004 | |||
| US 2005031176 A1 10.02.2005. |
