Область техники, к которой относится изобретение
Настоящее изобретение относится к области коммутационных аппаратов для электрических систем среднего напряжения (например, сетей энергоснабжения или коммутационных щитов).
Уровень техники
Для целей настоящей заявки термин «среднее напряжение» (СН) относится к рабочим напряжениям на уровнях распределения электроэнергии, которые выше, чем 1 кВ переменного тока и 2 кВ постоянного тока вплоть до нескольких десятков кВ, например до 72 кВ переменного тока и 100 кВ постоянного тока.
Электрические системы СН обычно содержат коммутационные аппараты, например автоматические выключатели, размыкатели, замыкатели и тому подобное.
В настоящее время в электрических системах СН коммутационные аппараты выполнены с возможностью осуществления функций управления нагрузкой, например, проведения и отключения токов при нормальном состоянии цепи (включая условия перегрузки) для включения или выключения электрической нагрузки, или защитных функций, например, отключения токов при особых аномальных состояниях цепи (например, при состоянии короткого замыкания).
В настоящее время коммутационные аппараты, выполненные с возможностью осуществления функций данного типа, часто демонстрируют неудовлетворительные рабочие характеристики, если требуется осуществлять разнотипные функции. Например, коммутационный аппарат, выполненный с возможностью осуществления функций управления нагрузкой (например, с функцией отключения токов с синхронизированными фазовыми углами между электрическими фазами), обычно имеет недостаточные рабочие характеристики, когда требуется срабатывать при состоянии короткого замыкания.
С целью уменьшения этих проблем электрические системы в настоящее время снабжены коммутационными аппаратами, в частности выполненными с возможностью осуществления функций управления нагрузкой, и коммутационными аппаратами, в частности выполненными с возможностью осуществления защитных функций.
Очевидно, что такой подход подразумевает относительно высокие производственные и монтажные расходы.
В уровне техники до сих пор ощущается потребность в технических решениях, способных к преодолению или уменьшению технических проблем, раскрытых выше.
Раскрытие сущности изобретения
Чтобы ответить на вышеуказанную потребность, настоящее изобретение предусматривает коммутационный аппарат среднего напряжения согласно приведенному ниже пункту формулы 1 изобретения и относящимся к нему зависимым пунктам формулы.
В общем представлении, коммутационный аппарат согласно изобретению содержит:
- один или более электрических полюсов, каждый из которых выполнен с возможностью электрического соединения с соответствующей электрической линией;
- для каждого электрического полюса неподвижный контакт и подвижный контакт. Указанный подвижный контакт выполнен с возможностью реверсивного перемещения между положением разъединения от указанного неподвижного контакта и положением соединения с указанным неподвижным контактом. Указанный подвижный контакт выполнен с возможностью перемещения из указанного положения разъединения в указанное положение соединения во время маневра замыкания коммутационного аппарата и с возможностью перемещения из указанного положения соединения в указанное положение разъединения во время маневра размыкания коммутационного аппарата;
- приводные средства, выполненные с возможностью приведения в движение подвижных контактов указанных одного или более электрических полюсов.
Предпочтительно, указанные приводные средства содержат привод для каждого электрического полюса. Каждый привод выполнен с возможностью приведения в движение подвижного контакта соответствующего электрического полюса в ответ на сигналы управления, обеспечиваемые указанным управляющим блоком.
Предпочтительно, указанные приводные средства содержат по меньшей мере серводвигатель.
Коммутационный аппарат, согласно изобретению, функционально соединен с управляющим блоком, или содержит управляющий блок, для управления указанными приводными средствами.
Указанный управляющий блок содержит множество устройств ввода, на которых указанный управляющий блок может принимать входные сигналы, обеспечиваемые одним или более устройствами, функционально соединенными с указанным управляющим блоком или включенными в состав указанного управляющего блока.
Указанный управляющий блок выполнен с возможностью осуществления множества выбираемых процедур управления для управления указанными приводными средствами во время маневра указанного коммутационного аппарата.
Указанный управляющий блок выполнен с возможностью выбора и осуществления выбираемых процедур управления в ответ на прием входного сигнала на устройстве ввода, соответствующего указанной выбираемой процедуре, на основе информации, обеспечиваемой указанным входным сигналом.
Согласно аспекту изобретения, указанный управляющий блок выполнен с возможностью осуществления первой группы процедур управления для управления указанными приводными средствами во время маневра указанного коммутационного аппарата. Процедуры управления указанной первой группы процедур управления сконфигурированы таким образом, чтобы указанный коммутационный аппарат выполнял защитные функции, когда указанный управляющий блок осуществляет указанные процедуры управления.
Предпочтительно, указанный управляющий блок содержит первую группу устройств ввода. Указанный управляющий блок выполнен с возможностью выбора и осуществления выбираемых процедур управления указанной первой группы процедур управления в ответ на прием входного сигнала на соответствующем устройстве ввода указанной первой группы устройств ввода.
Согласно одному аспекту изобретения, указанный управляющий блок выполнен с возможностью осуществления второй группы процедур управления для управления указанными приводными средствами во время маневра указанного аппарата. Процедуры управления указанной второй группы процедур управления сконфигурированы таким образом, чтобы указанный коммутационный аппарат выполнял функции управления нагрузкой, когда указанный управляющий блок осуществляет указанные процедуры управления.
Предпочтительно, указанный управляющий блок содержит вторую группу устройств ввода. Указанный управляющий блок выполнен с возможностью выбора и осуществления выбираемых процедур управления указанной второй группы процедур управления в ответ на прием входного сигнала на соответствующем устройстве ввода указанной второй группы устройств ввода.
Предпочтительно, для указанной первой группы устройств ввода назначен более высокий приоритет, чем для указанной второй группы устройств ввода.
Согласно некоторым вариантам осуществления изобретения, один или более указанных устройств ввода представляют собой модули двоичного ввода, выполненные с возможностью приема и обработки двоичных входных сигналов.
Согласно некоторым вариантам осуществления изобретения, один или более указанных устройств ввода представляют собой модули компаратора, выполненные с возможностью приема и обработки входных сигналов, непрерывно меняющихся во времени путем сравнения указанных входных сигналов с допустимыми пороговыми уровнями.
В еще одном аспекте настоящее изобретение относится к управляющему блоку для коммутационного аппарата среднего напряжения, согласно приведенному ниже пункту 11 формулы изобретения.
Краткое описание чертежей
Характеристики и преимущества изобретения станут понятны из описания предпочтительных, но не ограничивающих, вариантов осуществления управляющего блока согласно изобретению, неограничивающие примеры которого приведены на прилагаемых чертежах, где:
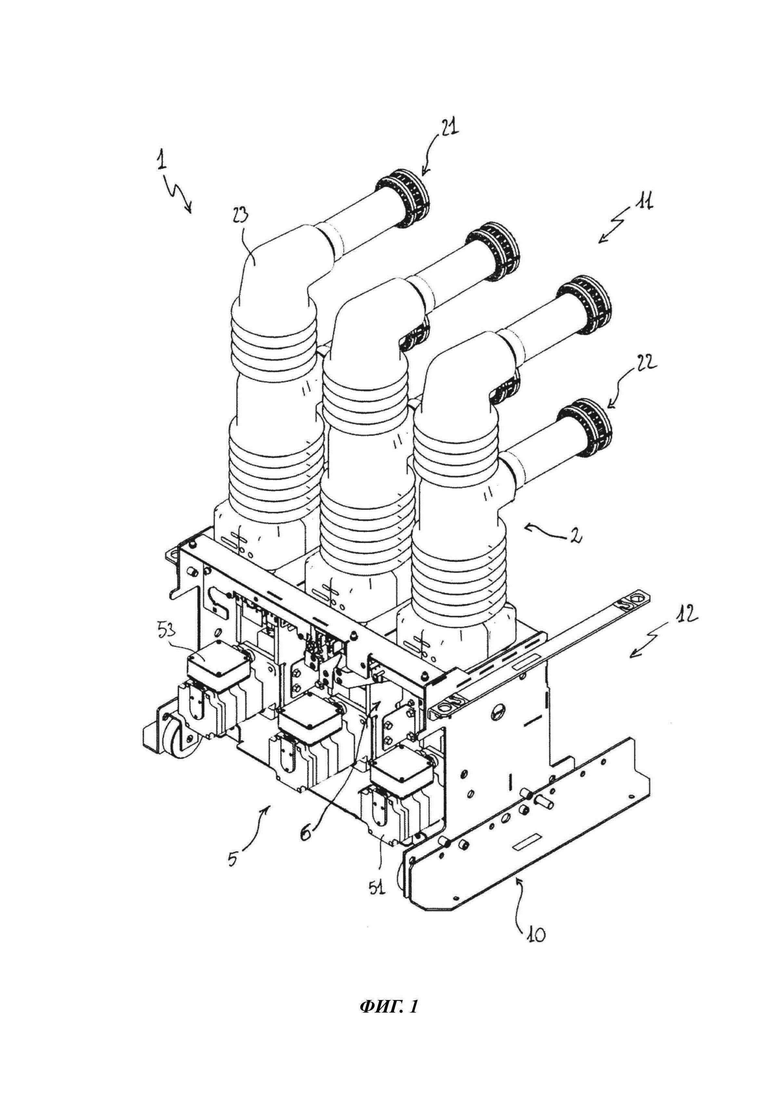
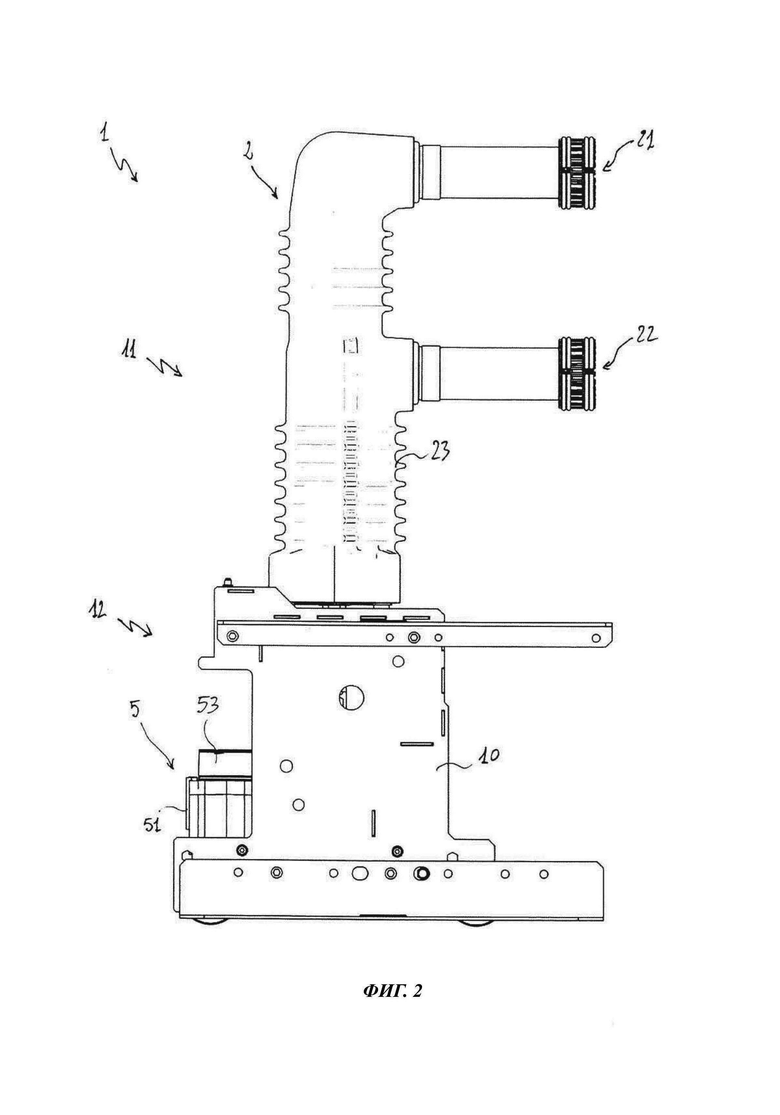
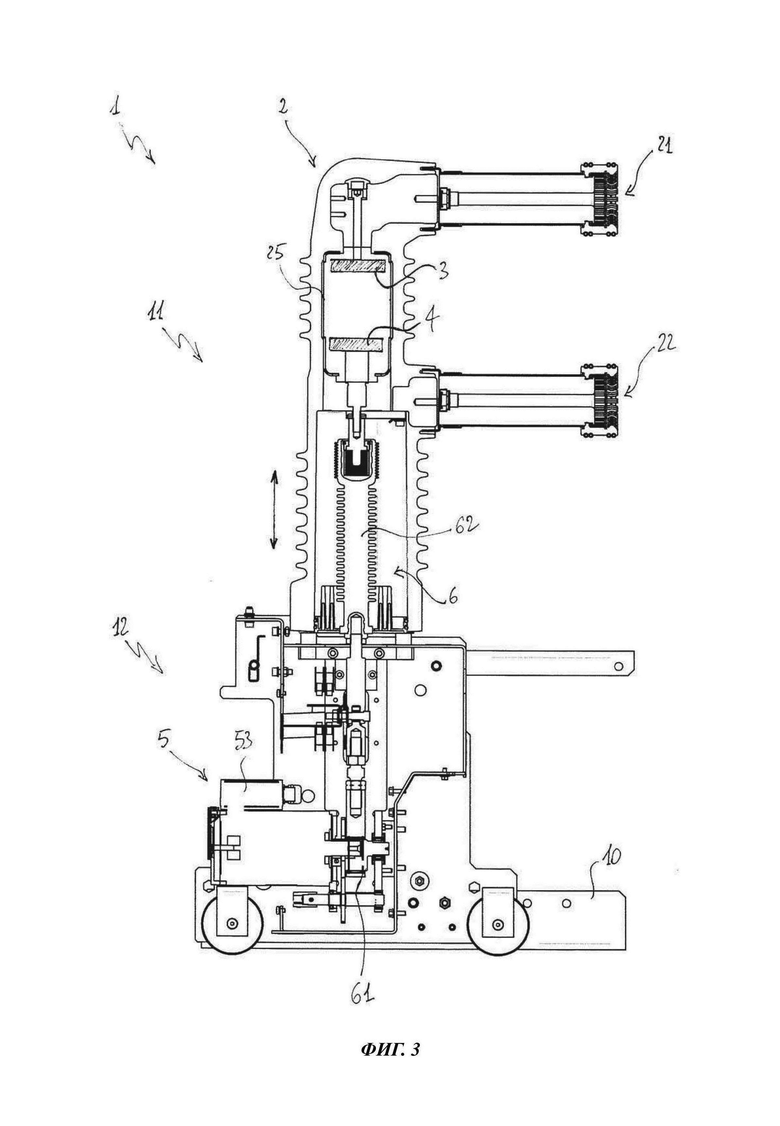
-на фигурах 1-3 представлены схематические виды коммутационного аппарата СН согласно изобретению;
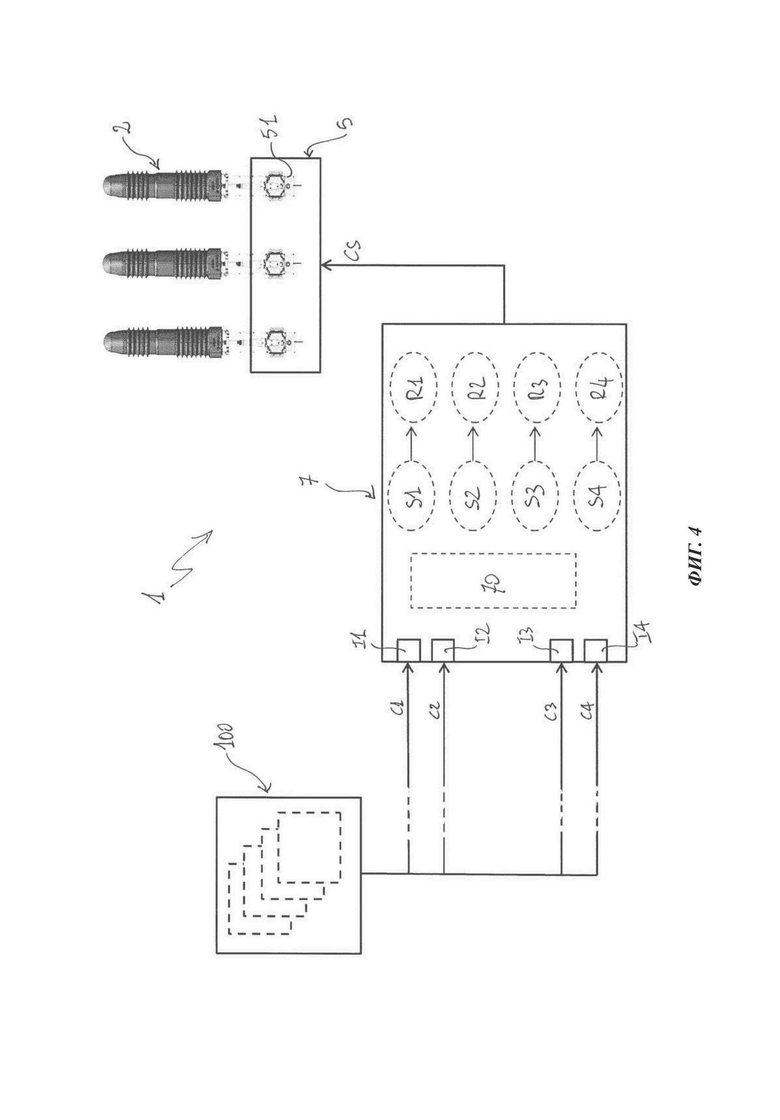
-на фигуре 4 представлен схематический вид управляющего блока согласно различным вариантам осуществления изобретения;
-на фигурах 5-8 представлены схематические примеры законов движения для подвижных контактов, которые могут быть реализованы во время маневра коммутационного аппарата согласно изобретению.
Осуществление изобретения
Со ссылкой на фигуры, настоящее изобретение относится к коммутационному аппарату 1 среднего напряжения (СН).
В целом, коммутационный аппарат 1 СН может быть любого типа, подходящего для установки в энергосетях, например автоматический выключатель, размыкатель, замыкатель или другое устройство подобного типа.
Предпочтительно, коммутационный аппарат 1 относится к вакуумному типу работы, как показано на упомянутых фигурах.
Однако, согласно альтернативным вариантам осуществления (не показаны), коммутационный аппарат 1 может быть воздушно-изолированного типа или газоизолированного типа.
Согласно общему определению коммутационный аппарат 1 содержит секцию 11 полюса и основание 12, которые соответственно содержат электрические полюса 2 и основные исполнительные детали 5, 6 коммутационного аппарата.
Подразумевая нормальное установочное положение коммутационного аппарата 1, показанное на фигурах 1-3, секция 11 полюса частично перекрывается основанием 12.
Предпочтительно, коммутационный аппарат 1 содержит наружную рамку 10, которая может быть по меньшей мере частично выполненной из электроизоляционного материала известного типа.
В секции 11 полюса коммутационный аппарат 1 содержит один или более электрических полюсов 2.
Предпочтительно, коммутационный аппарат 1 относится к многофазному (например, трехфазному) типу и, таким образом, он содержит множество (например, три) электрических полюсов 2.
Однако, согласно альтернативным вариантам осуществления (не показаны), коммутационный аппарат 1 может быть однофазного типа и содержать один электрический полюс.
Предпочтительно, каждый электрический полюс 2 содержит соответствующий изолирующий кожух 23, который легко закрепляется на основании 12.
Предпочтительно, каждый изолирующий кожух 23 сформирован продолговатым (например, цилиндрическим) пустотелым корпусом из электроизоляционного материала известного типа.
Предпочтительно, каждый изолирующий кожух 23 определяет внутренний объем, в котором размещены компоненты соответствующего электрического полюса 2.
Преимущественно, каждый электрический полюс 2 содержит первый полюсной вывод 21 и второй полюсной вывод 22, которые могут быть механически прикреплены к соответствующему кожуху 23 с помощью подходящих фланцев.
Полюсные выводы 21, 22 выполнены с возможностью электрического соединения с соответствующими электрическими проводниками (например, фазовыми проводами) электрической линии.
Для каждого электрического полюса 2, коммутационный аппарат 1 содержит неподвижный контакт 3 и подвижный контакт 4, которые находятся в электрическом соединении с первым и вторым полюсными выводами 21, 22 соответственно.
Каждый подвижный контакт 4 выполнен с возможностью реверсивного перемещения вдоль соответствующей оси перемещения, которая преимущественно совпадает с главной продольной осью или параллельна главной продольной оси соответствующего электрического полюса 2.
В частности, каждый подвижный контакт 4 выполнен с возможностью реверсивного перемещения (см. соответствующую двунаправленную стрелку перемещения на фигуре 3) между положением разъединения (разомкнутым положением) от соответствующего неподвижного контакта 3 и положением соединения (замкнутым положением) с соответствующим неподвижным контактом 3.
Перемещение подвижного контакта 4 от указанного положения соединения в указанное положение разъединения представляет собой маневр размыкания коммутационного аппарата 1, при этом перемещение подвижного контакта 4 из указанного положения разъединения в указанное положение соединения представляет собой маневр замыкания коммутационного аппарата 1.
Когда коммутационный аппарат 1 относится к вакуумному типу работы, как показано на приведенных фигурах, для каждого электрического полюса 2 коммутационный аппарат 1 содержит вакуумный сосуд 25, в котором размещена соответствующая пара подвижных и неподвижных контактов 3, 4 и может взаимно соединяться/разъединяться.
Коммутационный аппарат 1 содержит приводные средства 5, выполненные с возможностью приведения в движение подвижных контактов 4 электрических полюсов 2.
В целом, приводные средства 5 могут быть любого типа, в соответствии с потребностями. Так они могут быть моторизованного типа, например, содержать один или более электродвигателей (как показано на фигурах 1-3), электромагнитного типа, например, содержать одну или более катушек возбуждения или механического типа, например, содержать одну или более приводных пружин.
Предпочтительно, как показано на приведенных фигурах, приводные средства 5 содержат привод 51 для каждого электрического полюса 2
Каждый привод 51 преимущественно выполнен с возможностью приведения в движение подвижного контакта 4 соответствующего электрического полюса 2, на котором он установлен.
На фигурах 1-3 показан вариант осуществления изобретения, в котором приводные средства 5 включают в себя блок серводвигателя, обеспечивающий приводные усилия для приведения в движение подвижных контактов 4.
Блок 5 серводвигателя предпочтительно содержит, для каждого электрического полюса, серводвигатель 51, выходной вал которого функционально соединен с соответствующим подвижным контактом 4 электрического полюса.
Предпочтительно, блок 5 серводвигателя содержит, для каждого серводвигателя 51, блок 53 питания и управления, содержащий подходящие электрические схемы для питания соответствующего электродвигателя 50 и подходящие электронные схемы (например, содержащие один или более блоков цифровой обработки данных, таких как микропроцессоры) для управления работой соответствующего серводвигателя 51, например в ответ на подходящие сигналы управления, принятые от управляющего блока.
Предпочтительно, коммутационный аппарат 1 содержит узел 6 передачи движения, выполненный с возможностью функционального соединения приводных средств 5 с подвижными контактами 4 электрических полюсов 2.
В целом, узел 6 передачи движения может быть любого типа, в соответствии с потребностями.
В варианте осуществления, показанном на фигурах 1-3, узел 6 передачи движения содержит, для каждого электрического полюса 2, эксцентриковый механизм 61 передачи движения, предпочтительно расположенный таким образом, чтобы он приводился в движение за счет вращательных механических усилий, обеспечиваемых соответствующим серводвигателем 51, и передавал, в свою очередь, поступательные механические усилия для приведения в движение подвижного контакта 4 соответствующего электрического полюса 2 во время маневра размыкания и маневра замыкания коммутационного аппарата.
В варианте осуществления, показанном на фигурах 1-3, узел 6 передачи движения дополнительно содержит, для каждого электрического полюса 2, стержневое устройство 62 (например, содержащее множество взаимно соединенных передаточных стержней), выполненное с возможностью приведения в движение за счет поступательных механических усилий, обеспечиваемых соответствующим эксцентриковым механизмом 61, и передачи, в свою очередь, поступательных механических усилий подвижному контакту 4 соответствующего электрического полюса 2 во время маневра размыкания и маневра замыкания коммутационного аппарата.
В основном, электрические полюса 2, приводные средства 5 и узел 6 передачи движения коммутационного аппарата 1 могут быть известного типа и для краткости изложения они не будут более детально раскрыты.
В качестве примера, они могут быть настроены и работать так же, как и в коммутационном аппарате, раскрытом в Европейской патентной заявке ЕР 17154638.5.
Согласно изобретению, коммутационный аппарат 1 функционально соединен с управляющим блоком 7 или содержит управляющий блок 7, выполненный с возможностью управления работой коммутационного аппарата 1.
В целом, управляющий блок 7 может быть образован любым интеллектуальным электронным устройством (ИЭУ), соответствующим образом выполненным с возможностью осуществления функций управления коммутационным аппаратом.
В качестве примера, управляющий блок 7 может быть контроллером для сетей электропередач или распределительных щитов.
Предпочтительно, управляющий блок 7 содержит компьютеризированные средства 70 (которые могут содержать подходящие источники цифровой обработки данных, например, один или более микропроцессоров или цифровых сигнальных процессоров (DSP)), выполненные с возможностью приема и исполнения инструкций программного обеспечения для того, чтобы выполнять предусмотренные функции управления, осуществлять соответствующие меры управления, принимать, обрабатывать и подавать сигналы данных и/или сигналы управления, и т.п.
Предпочтительно, управляющий блок 7 является частью коммутационного аппарата 1 и предпочтительно размещен на панели или вблизи от основания 12.
Однако управляющий блок 7 может быть автоматизированным устройством, функционально связанным с коммутационным аппаратом 1 и, возможно, расположенным в удаленном местоположении относительно последнего.
Предпочтительно, управляющий блок 7 выполнен с возможностью управления приводными средствами 5.
Для этой цели, во время работы, управляющий блок 7 подает соответствующие сигналы CS управления на привод 51 приводных средств 5 (фигура 4).
Согласно изобретению, управляющий блок 7 содержит множество устройств I1, I2, I3, I4 ввода, на которых указанный управляющий блок принимает входные сигналы С1, С2, С3, С4, обеспечиваемые одним или более устройствами 100, функционально соединенными с указанным управляющим блоком или включенными в состав указанного управляющего блока.
Модули I1, I2, I3, I4 ввода предпочтительно выполнены с возможностью приема и обработки входных сигналов С1, С2, С3, С4 таким образом, чтобы получать входную информацию, которая затем обрабатывается компьютеризированными средствами управляющего блока 7.
Предпочтительно, входные сигналы С1, С2, С3, С4 являются двоичными входными сигналами, а устройства I1, I2, I3, I4 ввода являются модулями двоичного ввода, выполненными с возможностью приема и обработки двоичных входных сигналов С1, С2, С3, С4.
Для целей настоящего изобретения предполагается, что двоичный сигнал является сигналом, принимающим логическое состояние «высокий» или логическое состояние «низкий» в каждый отдельно взятый момент времени.
В качестве примера, при эксплуатации электрических систем СН, двоичным сигналом может быть сигнал напряжения, принимающий два различных уровня напряжения в каждый отдельно взятый момент времени, а именно высокий уровень напряжения (например, несколько десятков В) представляет собой «высокое» логическое состояние двоичного сигнала, и низкий уровень напряжения (например, 0 В) представляет собой «низкое» логическое состояние двоичного сигнала.
Согласно еще одному варианту осуществления изобретения, входные сигналы С1, С2, С3, С4 могут быть типа, непрерывно изменяющегося во времени (на практике - аналогового типа), а устройства I1, I2, I3, I4 ввода представляют собой модули компаратора, выполненные с возможностью приема и обработки таких входных сигналов С1, С2, С3, С4 путем сравнения указанных входных сигналов с допустимыми пороговыми уровнями.
В качестве примера, при эксплуатации электрических систем СН, сигналом, непрерывно меняющийся во времени, может быть сигнал напряжения, отражающий характер изменения количества электроэнергии, который обеспечивается сенсорным устройством.
Устройства 100 могут содержать защитные реле, сенсорные устройства, контроллеры, компьютеризированные устройства, компьютеризированные платформы, серверы и, в общих чертах, любое устройство, пригодное для взаимодействия с управляющим блоком 7.
Устройства 100 являются, как правило, внешними по отношению к управляющему блоку 7 и могут быть расположены в электрической системе, где установлен коммутационный аппарат 1, или могут быть установлены удаленно по отношению к последнему, даже на уровне облачных вычислений.
Однако устройства 100 могут быть встроены в управляющий блок 7. В качестве примера, устройством 100 может быть датчик магнитного поля, встроенный в управляющий блок 7.
Согласно изобретению, управляющий блок 7 выполнен с возможностью осуществления множества выбираемых процедур R1, R2, R3, R4 управления для управления приводными средствами 5 во время маневра замыкания или размыкания коммутационного аппарата.
Для ясности следует определить, что, для целей настоящего изобретения, термин «процедура управления» определяет последовательность этапов управления (на практике процедура управления) для управления приводными средствами 5.
Предпочтительно, управляющий блок 7 осуществляет заданную выбираемую процедуру R1, R2, R3, R4 управления через выполнение соответствующего сохраненного набора инструкций программного обеспечения с помощью компьютеризированных средств 70.
Таким образом, когда выбрана процедура R1, R2, R3, R4 управления, компьютеризированные средства 70 выполняют набор инструкций, соответствующих указанной процедуре управления для осуществления указанной процедуры управления.
Предпочтительно, управляющий блок 7 выполнен с возможностью хранения различных наборов S1, S2, S3, S4 инструкций программного обеспечения, исполняемых компьютеризированными средствами 70. Каждый набор инструкций программного обеспечения соответствует выбранной процедуре R1, R2, R3, R4 управления, которая может быть осуществлена управляющим блоком 7.
Когда управляющий блок 7 осуществляет выбираемую процедуру R1, R2, R3, R4 управления для управления приводными средствами 5 во время маневра указанного коммутационного аппарата, указанные приводные средства приводят в движение подвижные контакты 4 электрических полюсов 2 таким образом, чтобы осуществить соответствующий закон L1, L2, L3, L4 движения для указанных подвижных контактов.
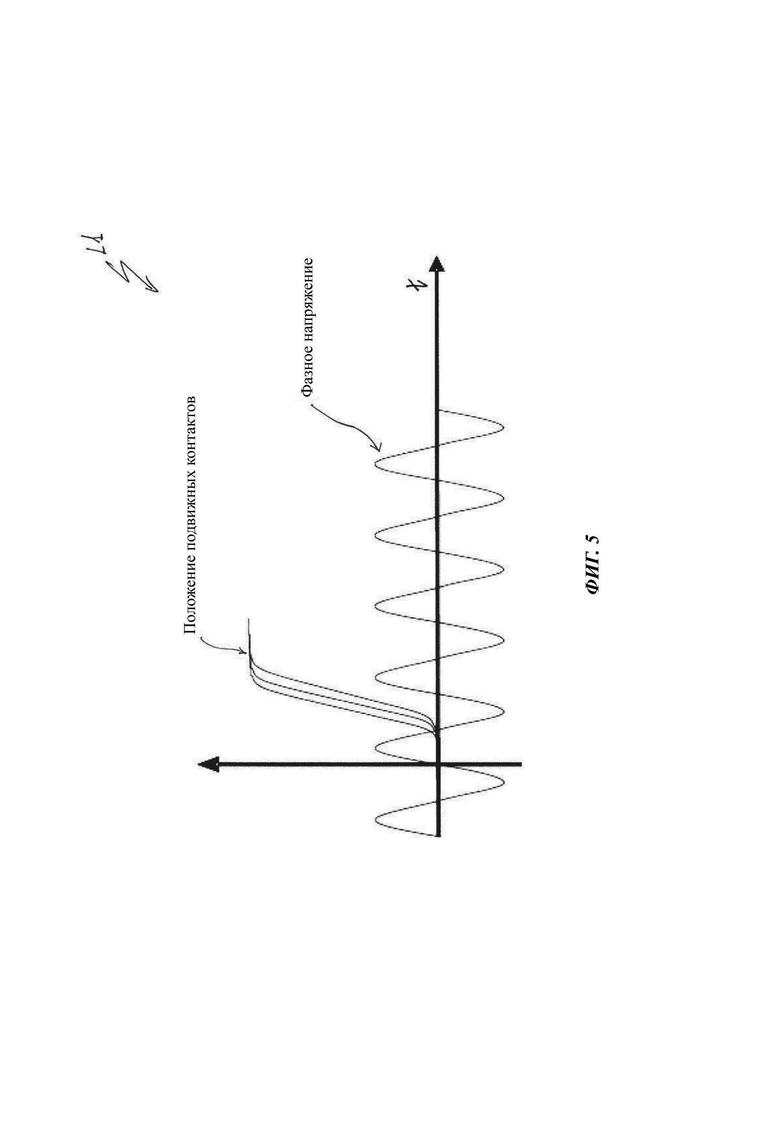
На фигуре 5 показан первый закон L1 движения для подвижных контактов 4.
Согласно такому закону движения, подвижные контакты 4 приводят в движение в заданные моменты времени (например, моменты перехода через нулевое значение) фазного напряжения без какой-либо синхронизации фазовых углов между электрическими фазами.
Очевидно, что такой закон движения для подвижных контактов 4 особенно подходит для его реализации, когда защитные функции (например отключение нагрузки в состоянии короткого замыкания) должны быть осуществлены коммутационным аппаратом 1 посредством маневра размыкания.
Предпочтительно, первый закон L1 движения для подвижных контактов 4 может быть реализован, когда управляющий блок 7 осуществляет соответствующую выбираемую первую процедуру R1 управления для управления приводными средствами 5.
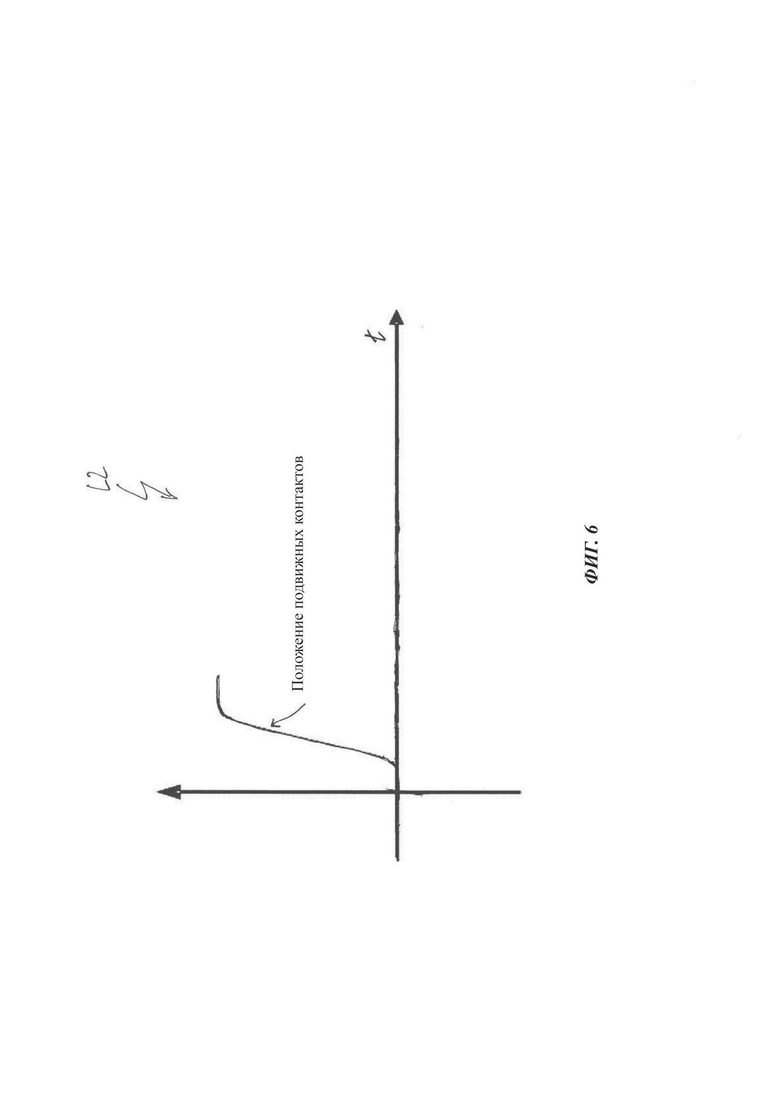
На фигуре 6 показан второй закон L2 движения для подвижных контактов 4.
Согласно такому закону движения, подвижные контакты 4 приводят в движение с относительно крутым профилем скорости (маневр быстрого размыкания).
Очевидно, что этот второй закон движения для подвижных контактов 4 также особенно подходит для его реализации, когда защитные функции должны быть осуществлены коммутационным аппаратом 1 посредством маневра размыкания.
Предпочтительно, второй закон L2 движения для подвижных контактов 4 может быть реализован, когда управляющий блок 7 осуществляет соответствующую выбираемую вторую процедуру R2 управления для управления приводными средствами 5.
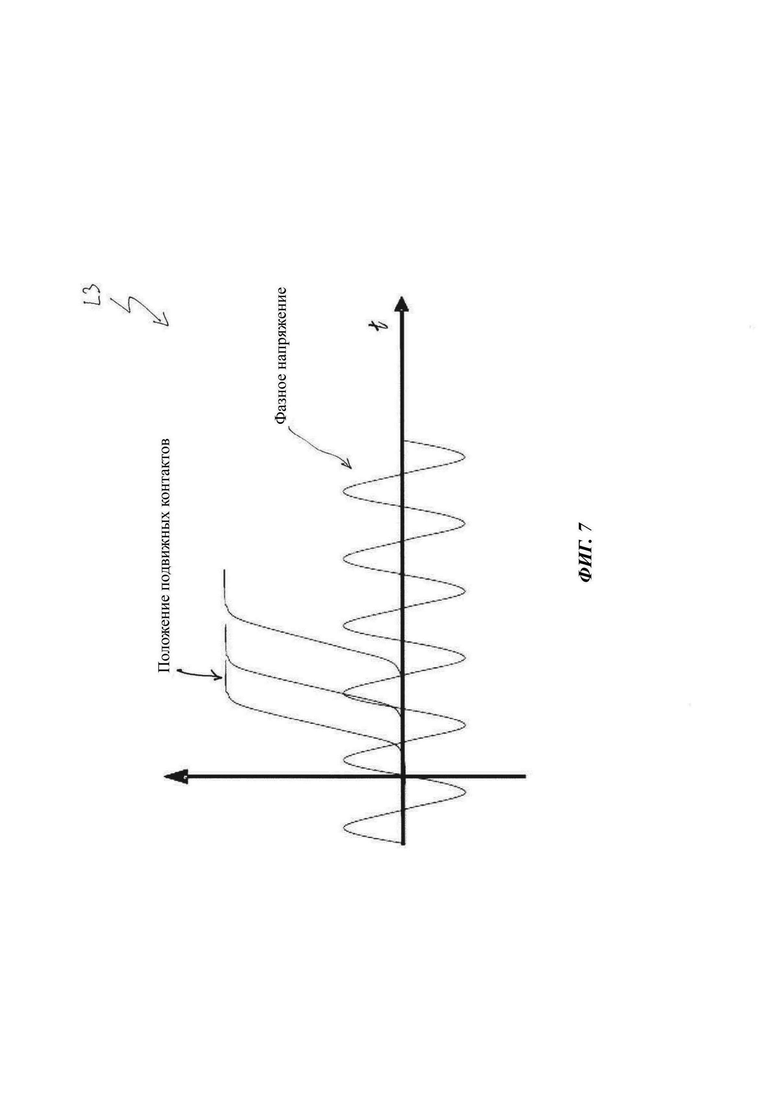
На фигуре 7 показан третий закон L3 движения для подвижных контактов 4 Согласно такому закону движения, подвижные контакты 4 приводят в движение при различных заданных переходах через нулевое значение фазного напряжения с синхронизированными фазовыми углами между электрическими фазами.
Очевидно, что такой закон движения для подвижных контактов 4 особенно подходит для его реализации, когда функции управления нагрузкой (например отключение нагрузки при нормальных условиях) должны быть осуществлены коммутационным аппаратом 1 посредством маневра размыкания.
Предпочтительно, третий закон L3 движения для подвижных контактов 4 может быть реализован, когда управляющий блок 7 осуществляет соответствующую выбираемую третью процедуру R3 управления для управления приводными средствами 5.
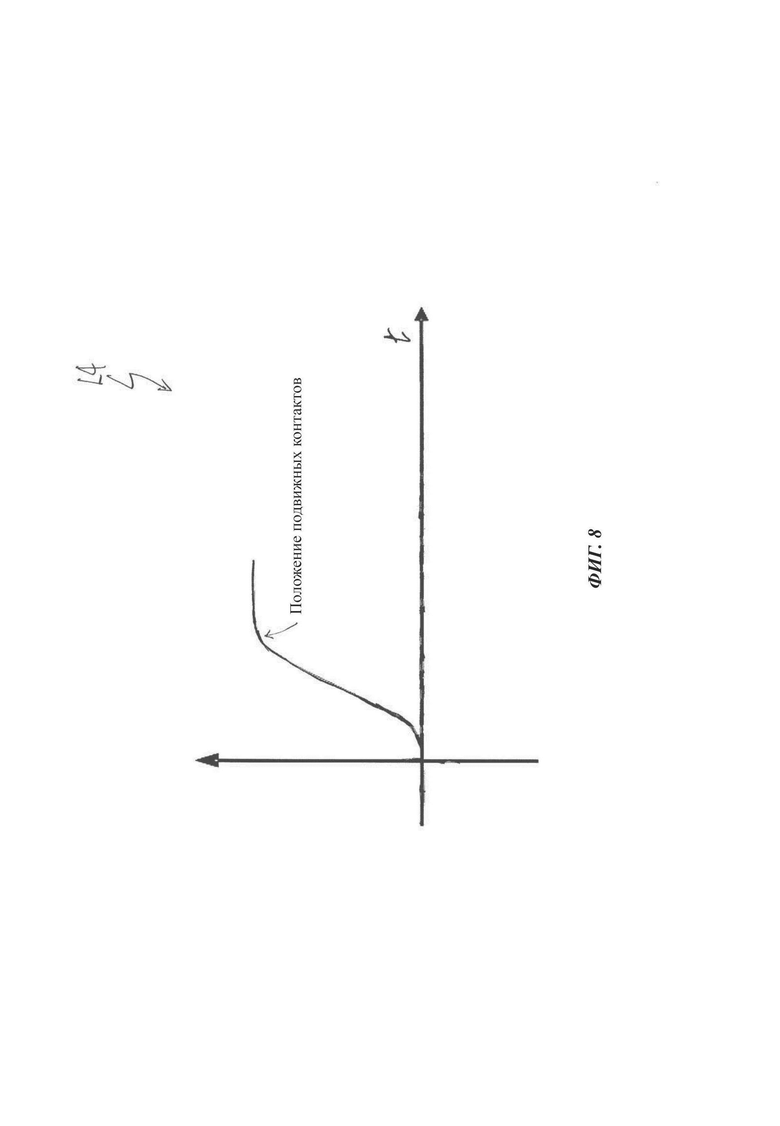
На фигуре 8 показан четвертый закон L4 движения для подвижных контактов 4.
Согласно такому закону движения, подвижные контакты 4 приводят в движение с относительно плавным профилем скорости (медленный маневр размыкания).
Очевидно, что также этот закон движения для подвижных контактов 4 особенно подходит для его реализации, когда функции управления нагрузкой должны быть осуществлены коммутационным аппаратом 1 посредством маневра размыкания.
Предпочтительно, четвертый закон L4 движения для подвижных контактов 4 может быть реализован, когда управляющий блок 7 осуществляет соответствующую выбираемую четвертую процедуру R4 управления для управления приводными средствами 5.
Как это очевидно для специалиста, дополнительные примеры законов движения для подвижных контактов могут быть понятны как в отношении маневров замыкания, так и маневров размыкания подвижных контактов 4.
Важно отметить, что каждый возможный закон движения для подвижных контактов 4 преимущественно функционально выполняется, когда управляющий блок 7 осуществляет соответствующую процедуру управления для управления приводными средствами 5 во время маневра коммутационного аппарата 1.
Согласно изобретению, управляющий блок 7 выполнен с возможностью выбора и осуществления выбираемых процедур R1, R2, R3, R4 управления в ответ на прием входного сигнала С1, С2, С3, С4 на устройстве I1, I2, I3, I4 ввода, соответствующего указанной выбираемой процедуре и на основе информации, предоставленной принятым входным сигналом.
На практике, когда он принимает входной сигнал С1, С2, С3, С4 на устройстве I1, I2, I3, I4 ввода (например напряжение двоичного сигнала в состоянии «высокой логики», выдаваемое посредством реле, или напряжение аналогового сигнала, превышающее заданный порог, предусмотренное сенсорным устройством), управляющий блок 7 выбирает процедуру R1, R2, R3, R4 управления, соответствующую указанному модулю ввода и осуществляет такую процедуру управления для управления приводными средствами 5 во время маневра указанного коммутационного аппарата.
Для того, чтобы управлять выбором заданной процедуры R1, R2, R3, R4 управления, компьютеризированные средства 70 преимущественно выполняют сохраненный набор инструкций программного обеспечения для обработки входной информации, предоставленной устройством I1, I2, I3, I4 ввода, принимающим входной сигнал С1, С2, С3, С4.
Предпочтительно, управляющий блок 7 выполнен с возможностью осуществления первой группы процедур управления для управления приводными средствами 5.
Предпочтительно, указанная первая группа процедур управления содержит одну или более процедур управления, сконфигурированных таким образом, чтобы коммутационный аппарат 1 выполнял защитные функции, когда указанный управляющий блок 7 осуществляет указанные процедуры управления.
Со ссылкой на фигуры 4-6, вышеупомянутая первая группа процедур управления может содержать вышеупомянутые первую и вторую процедуры R1, R2 управления, реализующие законы L1, L2 движения для подвижных контактов 4, при их осуществлении управляющим блоком 7.
Фактически, как показано выше, когда управляющий блок 7 осуществляет выбираемую процедуру R1 или R2 управления для управления приводными средствами 5, приводные средства 5 приводят в движение подвижные контакты 4 электрических полюсов 2 таким образом, чтобы реализовать соответствующий первый закон L1 движения или второй закон L2 движения для указанных подвижных контактов, причем указанные законы движения особенно подходят для их реализации, когда коммутационный аппарат 1 должен выполнять защитные функции, как описано выше.
Предпочтительно, управляющий блок 7 содержит первую группу устройств ввода, выполненных с возможностью приема входных сигналов, обеспечиваемых устройствами 100.
Предпочтительно, управляющий блок 7 выполнен с возможностью выбора и осуществления выбираемых процедур управления указанной первой группы процедур управления в ответ на прием входного сигнала на соответствующем устройстве ввода указанной первой группы устройств ввода.
Со ссылкой на фигуру 4, вышеупомянутая первая группа устройств ввода может содержать вышеупомянутые первое и второе устройства I1, I2 ввода управляющего блока 7.
Фактически, как показано выше, управляющий блок 7 выполнен с возможностью выбора и осуществления выбираемой процедуры R1 или R2 управления указанной первой группы процедур управления в ответ на прием входного сигнала С1 или С2 на соответствующем устройстве I1, I2 ввода.
Предпочтительно, управляющий блок 7 выполнен с возможностью осуществления второй группы процедур управления для управления указанными приводными средствами 5.
Предпочтительно, вторая группа процедур управления содержит одну или более процедур управления, сконфигурированных таким образом, чтобы коммутационный аппарат 1 выполнял функции управления нагрузкой, когда указанный управляющий блок 7 осуществляет указанные процедуры управления.
Со ссылкой на фигуры 4 и 7-8, вышеупомянутая вторая группа процедур управления может содержать вышеупомянутые третью и четвертую процедуры R3, R4 управления, которые реализуют законы L3, L4 движения для подвижных контактов 4, при их осуществлении управляющим блоком 7.
Фактически, как показано выше, когда управляющий блок 7 осуществляет выбираемую процедуру R3 или R4 управления для управления приводными средствами 5, приводные средства 5 приводят в движение подвижные контакты 4 электрических полюсов 2 таким образом, чтобы реализовать соответствующий третий закон L3 движения или четвертый закон L4 движения для указанных подвижных контактов, причем указанные законы движения могут быть применены, когда коммутационный аппарат 1 должен выполнять функции управления нагрузкой, как описано выше.
Предпочтительно, управляющий блок 7 содержит вторую группу устройств ввода, выполненных с возможностью приема входных сигналов, обеспечиваемых устройствами 100.
Предпочтительно, управляющий блок 7 выполнен с возможностью выбора и осуществления выбираемой процедуры управления второй группы процедур управления в ответ на прием входных сигналов на соответствующем устройстве ввода второй группы устройств ввода.
Со ссылкой на фигуру 4, вышеупомянутая вторая группа устройств ввода может содержать вышеупомянутые третье и четвертое устройства I3, I4 ввода управляющего блока 7.
Фактически, как показано выше, управляющий блок 7 выполнен с возможностью выбора и осуществления выбираемой процедуры R3 или R4 управления второй группы процедур управления в ответ на прием входных сигналов С3 или С4 на соответствующем устройстве I3 или I4 ввода.
Предпочтительно, для устройств I1, I2 ввода первой группы устройств ввода назначен более высокий приоритет, чем для устройств I3, I4 ввода второй группы устройств ввода.
Таким образом, если управляющий блок 7 одновременно (то есть в пределах заданного временного интервала, например, порядка миллисекунды) принимает входной сигнал С1 на устройстве И ввода первой группы устройств ввода и входной сигнал С3 на устройстве I3 ввода второй группы устройств ввода, он осуществляет процедуру R1 управления, соответствующую устройству И ввода, и не выполняет процедуру R3 управления, соответствующую устройству I3 ввода.
Подобным образом, если управляющий блок 7 принимает входной сигнал С1 на устройстве I1 ввода первой группы устройств ввода позже, чем входной сигнал С3 на устройстве I3 ввода второй группы устройств ввода, он осуществляет процедуру R1 управления, соответствующую устройству I1 ввода, и не выполняет процедуру R3 управления, соответствующую устройству I3 ввода, если выполнение последней процедуры R3 управления еще не началось.
Фактически, прием входного сигнала С1 на устройстве I1 ввода первой группы устройств ввода аннулирует прием входного сигнала С3 на устройстве I3 ввода второй группы устройств ввода, если выполнение процедуры R3 управления, соответствующей устройству I3 ввода второй группы устройств ввода, еще не началось.
Настоящее изобретение обеспечивает значительные преимущества по отношению к известным решениям уровня техники.
Так как согласно изобретению есть возможность осуществлять различные выбираемые процедуры R1, R2, R3, R4 управления в ответ на входные сигналы С1, С2, С3, С4 на соответствующих различных устройствах I1, I2, I3, I4 ввода, управляющий блок 7 может управлять приводными средствами 5 для работы в соответствии с различными рабочими режимами, каждый из которых осуществляет различный закон L1, L2, L3, L4 движения для подвижных контактов 4 электрических полюсов 2.
Таким образом, коммутационный аппарат 1 может выполнять функции различных типов, причем каждая выбирается простым способом с помощью соответствующего входного сигнала С1, С2, С3, С4 без вмешательства на аппаратном или программном уровне в сам коммутационный аппарат.
Таким образом, коммутационный аппарат 1 характеризуется высокой гибкостью использования, что делает его подходящим для осуществления должным образом как функций управления нагрузкой, так и функций защиты.
Благодаря этим возможностям коммутационного аппарата 1, схема электрической системы (например, сети энергоснабжения) может быть в значительной степени упрощена со значительной экономией с точки зрения производственных и монтажных расходов.
Коммутационный аппарат 1, согласно изобретению, характеризуется высокими уровнями надежности для предполагаемых применений.
Коммутационный аппарат 1, согласно изобретению, является относительно простым и дешевым в промышленном производстве и монтаже на месте эксплуатации.
Изобретение относится к электротехнике, а именно к коммутационному аппарату среднего напряжения. Технический результат заключается в повышении надежности работы, а также повышении гибкости использования коммутационного аппарата, то есть реализации функции управления нагрузкой или защитные функции без вмешательства на аппаратном или программном уровне в сам коммутационный аппарат. Коммутационный аппарат (1) среднего напряжения, содержит один или более электрических полюсов (2), каждый из которых выполнен с возможностью электрического соединения с соответствующей электрической линией. Для каждого электрического полюса неподвижный контакт (3) и подвижный контакт (4), причем подвижный контакт выполнен с возможностью реверсивного перемещения между положением разъединения от неподвижного контакта и положением соединения с неподвижным контактом, причем подвижный контакт выполнен с возможностью перемещения из положения разъединения в положение соединения во время маневра замыкания коммутационного аппарата и с возможностью перемещения из положения соединения в положение разъединения во время маневра размыкания коммутационного аппарата. Приводные средства (5), выполненные с возможностью приведения в движение подвижных контактов (4) одного или более электрических полюсов. Коммутационный аппарат функционально соединен с управляющим блоком (7) или содержит управляющий блок (7) для управления приводными средствами (5). Управляющий блок (7) содержит множество устройств (I1, I2, I3, I4) ввода, на которых управляющий блок может принимать входные сигналы (С1, С2, С3, С4), обеспечиваемые одним или более устройствами (100), функционально соединенными с управляющим блоком или включенными в состав управляющего блока. Управляющий блок (7) выполнен с возможностью осуществления множества различных выбираемых процедур (R1, R2, R3, R4) управления для управления приводными средствами (5) во время маневра коммутационного аппарата, вследствие чего приводные средства работают в соответствии с различными рабочими режимами, каждый из которых осуществляет различный закон (L1, L2, L3, L4) движения для подвижных контактов (4) электрических полюсов (2). Управляющий блок выполнен с возможностью выбора и осуществления выбираемой процедуры (R1, R2, R3, R4) управления в ответ на прием входного сигнала (С1, С2, С3, С4) на устройстве (I1, I2, I3, I4) ввода, соответствующего выбираемой процедуре. Когда управляющий блок (7) осуществляет выбираемую процедуру (R1, R2, R3, R4) управления для управления приводными средствами (5) во время маневра коммутационного аппарата, приводные средства (5) приводят в движение подвижные контакты (4) электрических полюсов (2) таким образом, чтобы реализовать закон (L1, L2, L3, L4) движения для подвижных контактов, соответствующий выполняемой процедуре управления. 9 з.п. ф-лы, 8 ил. 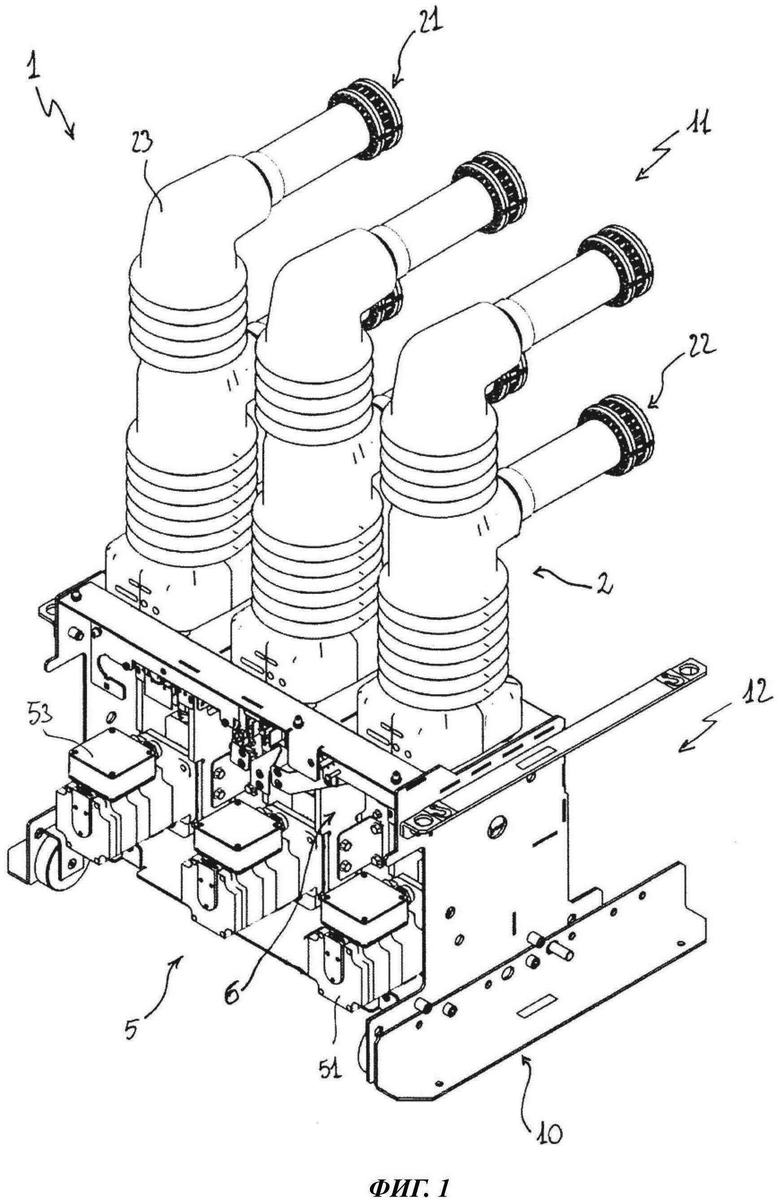
1. Коммутационный аппарат (1) среднего напряжения, содержащий:
- один или более электрических полюсов (2), каждый из которых выполнен с возможностью электрического соединения с соответствующей электрической линией;
- для каждого электрического полюса неподвижный контакт (3) и подвижный контакт (4), причем указанный подвижный контакт выполнен с возможностью реверсивного перемещения между положением разъединения от указанного неподвижного контакта и положением соединения с указанным неподвижным контактом, причем указанный подвижный контакт выполнен с возможностью перемещения из указанного положения разъединения в указанное положение соединения во время маневра замыкания коммутационного аппарата и с возможностью перемещения из указанного положения соединения в указанное положение разъединения во время маневра размыкания коммутационного аппарата;
- приводные средства (5), выполненные с возможностью приведения в движение подвижных контактов (4) указанных одного или более электрических полюсов;
причем указанный коммутационный аппарат функционально соединен с управляющим блоком (7) или содержит управляющий блок (7) для управления указанными приводными средствами (5);
причем указанный управляющий блок (7) содержит множество устройств (I1, I2, I3, I4) ввода, на которых указанный управляющий блок может принимать входные сигналы (С1, С2, С3, С4), обеспечиваемые одним или более устройствами (100), функционально соединенными с указанным управляющим блоком или включенными в состав указанного управляющего блока,
отличающийся тем, что указанный управляющий блок (7) выполнен с возможностью осуществления множества различных выбираемых процедур (R1, R2, R3, R4) управления для управления указанными приводными средствами (5) во время маневра указанного коммутационного аппарата, вследствие чего указанные приводные средства работают в соответствии с различными рабочими режимами, каждый из которых осуществляет различный закон (L1, L2, L3, L4) движения для подвижных контактов (4) указанных электрических полюсов (2),
причем указанный управляющий блок выполнен с возможностью выбора и осуществления выбираемой процедуры (R1, R2, R3, R4) управления в ответ на прием входного сигнала (С1, С2, С3, С4) на устройстве (I1, I2, I3, I4) ввода, соответствующего указанной выбираемой процедуре,
при этом когда управляющий блок (7) осуществляет выбираемую процедуру (R1, R2, R3, R4) управления для управления приводными средствами (5) во время маневра коммутационного аппарата, указанные приводные средства (5) приводят в движение подвижные контакты (4) электрических полюсов (2) таким образом, чтобы реализовать закон (L1, L2, L3, L4) движения для указанных подвижных контактов, соответствующий выполняемой процедуре управления.
2. Коммутационный аппарат по п. 1, отличающийся тем, что указанный управляющий блок (7) выполнен с возможностью осуществления первой группы процедур (R1, R2) управления для управления указанными приводными средствами (5) во время маневра указанного коммутационного аппарата, при этом процедуры управления указанной первой группы процедур управления сконфигурированы таким образом, чтобы указанный коммутационный аппарат выполнял защитные функции, когда указанный управляющий блок (7) осуществляет указанные процедуры управления.
3. Коммутационный аппарат по п. 2, отличающийся тем, что указанный управляющий блок (7) содержит первую группу устройств (I1, I2) ввода, причем указанный управляющий блок (7) выполнен с возможностью выбора и осуществления выбираемых процедур управления указанной первой группы процедур (R1, R2) управления в ответ на прием входного сигнала (С1, С2) на соответствующем устройстве (I1, I2) ввода указанной первой группы устройств ввода.
4. Коммутационный аппарат по любому из предыдущих пунктов, отличающийся тем, что указанный управляющий блок (7) выполнен с возможностью осуществления второй группы процедур (R3, R4) управления для управления указанными приводными средствами (5) во время маневра указанного коммутационного аппарата, при этом процедуры управления указанной второй группы процедур управления сконфигурированы таким образом, чтобы указанный коммутационный аппарат выполнял функции управления нагрузкой, когда указанный управляющий блок (7) осуществляет указанные процедуры управления.
5. Коммутационный аппарат по п. 4, отличающийся тем, что указанный управляющий блок (7) содержит вторую группу устройств (I3, I4) ввода, причем указанный управляющий блок (7) выполнен с возможностью выбора и осуществления выбираемых процедур управления указанной второй группы процедур (R3, R4) управления в ответ на прием входного сигнала (С3, С4) на соответствующем устройстве (I3, I4) ввода указанной второй группы устройств ввода.
6. Коммутационный аппарат по п. 3 или 5, отличающийся тем, что для указанной первой группы устройств (I1, I2) ввода назначен более высокий приоритет, чем для указанной второй группы устройств (I3, I4) ввода.
7. Коммутационный аппарат по любому из предыдущих пунктов, отличающийся тем, что один или более указанных устройств (I1, I2, I3, I4) ввода представляют собой модули двоичного ввода, выполненные с возможностью приема и обработки двоичных входных сигналов (С1, С2, С3, С4).
8. Коммутационный аппарат по любому из предыдущих пунктов, отличающийся тем, что один или более указанных устройств (I1, I2, I3, I4) ввода представляют собой модули компаратора, выполненные с возможностью приема и обработки входных сигналов (С1, С2, С3, С4), непрерывно меняющихся во времени.
9. Коммутационный аппарат по любому из предыдущих пунктов, отличающийся тем, что указанные приводные средства (5) содержат привод (51) для каждого электрического полюса (2), причем каждый привод выполнен с возможностью приведения в движение подвижного контакта (4) соответствующего электрического полюса в ответ на сигналы (CS) управления, обеспечиваемые указанным управляющим блоком (7).
10. Коммутационный аппарат по любому из предыдущих пунктов, отличающийся тем, что указанные приводные средства (5) включают в себя по меньшей мере серводвигатель.
| US 2007253124 A1, 01.11.2007 | |||
| УЛУЧШЕННОЕ ТВЕРДОТЕЛЬНОЕ ПЕРЕКЛЮЧАЮЩЕЕ УСТРОЙСТВО | 2013 |
|
RU2633389C2 |
| EP 3051549 A1, 03.08.2016 | |||
| Способ фитоочистки сточных вод | 2023 |
|
RU2819259C1 |

