ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящий вариант осуществления изобретения в целом относится к системе для запуска множества спутников с ракеты-носителя и, в частности, относится к системе и способу обеспечения отделения множества спутников, которые ни коим образом не взаимодействуют со струями и удовлетворяют требованию долговременного отсутствия столкновений.
УРОВЕНЬ ТЕХНИКИ
[0002] В обычных системах развертывания спутников используются многоступенчатые ракеты-носители для достижения орбиты выведения до их отделения по отдельности и вылета на свою конечную рабочую орбиту. Ракета-носитель имеет ограниченную мощность и движущую силу, поэтому все спутники должны быть развернуты в течение относительно небольшого временного окна. В случае большого количества спутников в качестве полезного груза их относительно быстрое развертывание в течение ограниченного временного окна затруднительно из-за их сближенности и неотъемлемого риска потенциального столкновения спутников.
[0003] В уровне техники (www.nasaspaceflight.com) раскрыто использование тормозной двигательной установки для перемещения верхней ступени после отсоединения спутника от транспортного носителя. В другом источнике уровня техники (US 9463882 Bi) раскрыт способ, в котором весь выводной модуль с движительной установкой отделяется от конечной ступени, а спутники отделяются позже от выводного модуля. Однако эти методики не помогают, когда требуется развернуть большое количество спутников за одну попытку безопасным образом и в течение короткого временного окна запуска.
[0004] В источнике US 9463882 131 раскрывается система и способ сборки и развертывания спутников. В этом решении несколько выводных модулей используются с их собственными движительными модулями для отделения набора спутников от модуля. Модули отделяют от конечной ступени носителя в назначенное время и могут быть сманеврированы друг от друга для предотвращения столкновения. Настоящее изобретение, направленное на устранение ограничений этого решения, предлагает следующие новые стратегии: (1) Все спутники прикреплены с соответствующей ориентацией и отделяются непосредственно от конечной ступени (2) Обеспечивается маневр крена, контроль времени отделения и отделение спутников под разными углами одновременно в разных направлениях и (3) Размещение системы формирования видеоизображения подтверждает надлежащее отделение.
[0005] Ссылка: digitalcommons.usu.edu, Издание AIAA/USU Конференции по малым спутникам 2002 г., Дональд Э. Кинан, «Стратегия развертывания множества вторичных полезных грузов в миссии MLV05» раскрывает отделение множества спутников, где основным вариантом является отделение различных спутников с разными относительными скоростями (дельта-v) в различные интервалы времени, где общее временное окно отделения было задано как 45 минут. Ограничения этого способа, на устранение которых направлено настоящее изобретение, заключаются в (1) почти одинаковой относительной скорости спутников при использовании того же механизма отделения, (2) общее время миссии может быть ограничено менее чем 800 с.
[0006] Ссылка: www.nasaspaceflight.com раскрывает, что российская пусковая установка отделила 37 спутников от задней части ракеты, когда двигатели ступени еще работали. В такой системе есть вероятность, что спутники могут столкнуться со струей ракетной движительной установки. Ограничения этого способа, рассматриваемые в настоящем изобретении, заключаются в следующем: (1) спутники были отделены одновременно в направлениях скорости и противоположной скорости, (2) подходящее направление монтажа спутников, устраняющее взаимодействия со струей, (3) размещение системы формирования видеоизображения обеспечивает фиксацию надлежащего отделения всех спутников и гарантирует отсутствие взаимодействия со струей. Также отсутствие струи было зафиксировано системой формирования видеоизображения.
[0007] Подводя итог, можно сказать, что решения предшествующего уровня техники имеют множество ограничений. Ни одно из них не обеспечивает надежного способа безопасного, своевременного и экономичного развертывания большого количества спутников. Для устранения этих ограничения реализована инновационная система и способ управления миссией для развертывания множества спутников с использованием многоступенчатой ракеты-носителя. Вариант осуществления настоящего изобретения решает одну или несколько из этих проблем уникальным и экономичным способом.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0008] Новая стратегия управления миссией для развертывания множества спутников имеет следующие цели:
[0009] Основная цель изобретения - надлежащее отделение множества спутников. Другой целью изобретения является обеспечение отделения множества спутников с увеличением разрыва на первых нескольких орбитах.
[0010] Еще одна цель изобретения заключается в обеспечении отделения множества спутников без какого-либо взаимодействия со струей. Еще одна цель изобретения заключается в том, чтобы реализовать новую схему маневрирования верхней ступени, к которой прикреплены спутники без какого-либо срабатывания тормозной двигательной установки для отведения верхней ступени от носителя после отсоединения спутника.
[0012] Еще одна цель изобретения заключается в исключении использования любого выводного модуля с движительным блоком для содействия развертыванию спутника.
[0013] Еще одна цель изобретения заключается в том, чтобы гарантировать, что никакая часть системы отделения, используемой для развертывания спутника, не будет блокировать траекторию спутников, отделяющихся впоследствии.
[0014] Другой целью изобретения является выполнение полного отделения спутников в пределах миссии короткой продолжительности. Еще одна цель изобретения заключается в обеспечении соответствующего направление монтажа для безопасного отделения без столкновения.
[0015] Еще одна цель изобретения заключается в фиксации всех отделений путем размещения систем формирования видеоизображения в соответствующих местах.
[0016] В соответствии с вышеупомянутыми целями настоящее изобретение обеспечивает новую систему и способ для развертывания множества спутников, позволяющие реализовать вышеупомянутые цели.
[0017] В одном аспекте варианта осуществления настоящего изобретения предложена система для запуска множества спутников с ракеты-носителя. Система включает в себя механическую конструкцию, которая имеет одно или несколько монтажных средств, блок управления для управления одним или несколькими монтажными средствами для позиционирования и отделения множества спутников в механической конструкции, систему фиксации изображения для мониторинга позиционирования каждого спутника в механической конструкции. Монтажные средства выполнены с возможностью позиционирования спутников в осевом, наклонном и радиальном отделениях на расстоянии, для предотвращения контакта каждого спутника друг с другом в течение короткого периода времени, а также в течение долгого периода времени орбитальной эволюции. Монтажные средства выполнено с возможностью размещения одного или нескольких спутников. Первый набор монтажных средств расположен в осевом отделении, второй набор монтажных средств расположен в наклонном отделении, а третий набор монтажных средств расположен в радиальном отделении. Требуемое минимальное расстояние между отделяемыми телами, когда они пересекаются друг с другом, определяется на основе максимальной вероятности (Pmax) столкновения, получаемой из следующего уравнения (см. Владимир А. Чоботов, Орбитальная механика, второе издание, AIAA Educational Series, 1996):
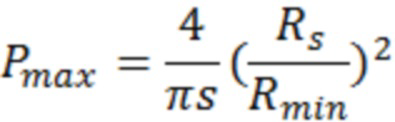
где Rmin - минимальное расстояние между ними, а Rs - эффективный радиус столкновения.
[0018] В другом аспекте варианта осуществления настоящего изобретения предложен способ развертывания и запуска множества спутников с использованием механической конструкции на ракете-носителе. Способ включает в себя этапы (i) позиционирования указанного множества спутников во множестве монтажных средств, предусмотренных в указанной механической конструкции, при этом указанные монтажные средства расположены на расстоянии для удовлетворения требованию долговременного отсутствия столкновений на основе максимальной вероятности (Pmax) столкновения, (ii) отделения первого набора спутников в осевом направлении и второго набора спутников - в радиальном направлении, (iii) разделения второго набора спутников на две группы на основе направления скорости и направления противоположной скорости, (iv) переориентации ступени и отделение спутников, сгруппированных под любой из упомянутых двух групп, с небольшой скоростью крена от 0,20 до 0,35 градуса для обеспечения отделения спутников в орбитальной плоскости по направлениям скорости и противоположной скорости, и (v) запуска упомянутого первого набора спутников, расположенного в осевом направлении, части упомянутого второго набора спутников, расположенной в радиальном направлении, и оставшейся части упомянутого второго набора спутников, расположенной под наклоном относительно упомянутой ракеты-носителя для их отделения с соответствующим распределением отцентрированной дельты v. Система формирования видеоизображения смонтирована и позиционирована так, что обеспечивает возможность фиксации всех событий отделения. На этапе отделения обеспечивают отделение всех спутников в оптимальном положении для соблюдения желаемого минимального расстояния для всех отделений. На этапе переориентации управляемость скоростью крена достигает от 0,20 до 0,35 градуса для обеспечения желаемого угла и направления отделения в орбитальной плоскости. Скорость крена и время отделения выбирают так, чтобы достигалось направление отделения в орбитальной плоскости, обеспечивающее желаемую разность отцентрированной дельта-v между двумя отделениями, для предотвращения контакта двух отделяющихся спутников друг с другом как в течение короткого, так и длинного периода времени эволюции орбиты. Этап отделения предотвращает взаимодействие между струей рулевого двигателя верхней ступени и отделяющимися спутниками.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0019] Преимущества и особенности изобретения станут более очевидными из следующего описания, которое ссылается на прилагаемые чертежи, приведенные только в качестве неограничивающих примеров и в которых:
[0020] Фиг. 1 иллюстрирует систему для запуска множества спутников с ракеты-носителя в соответствии с вариантом осуществления настоящего изобретения;
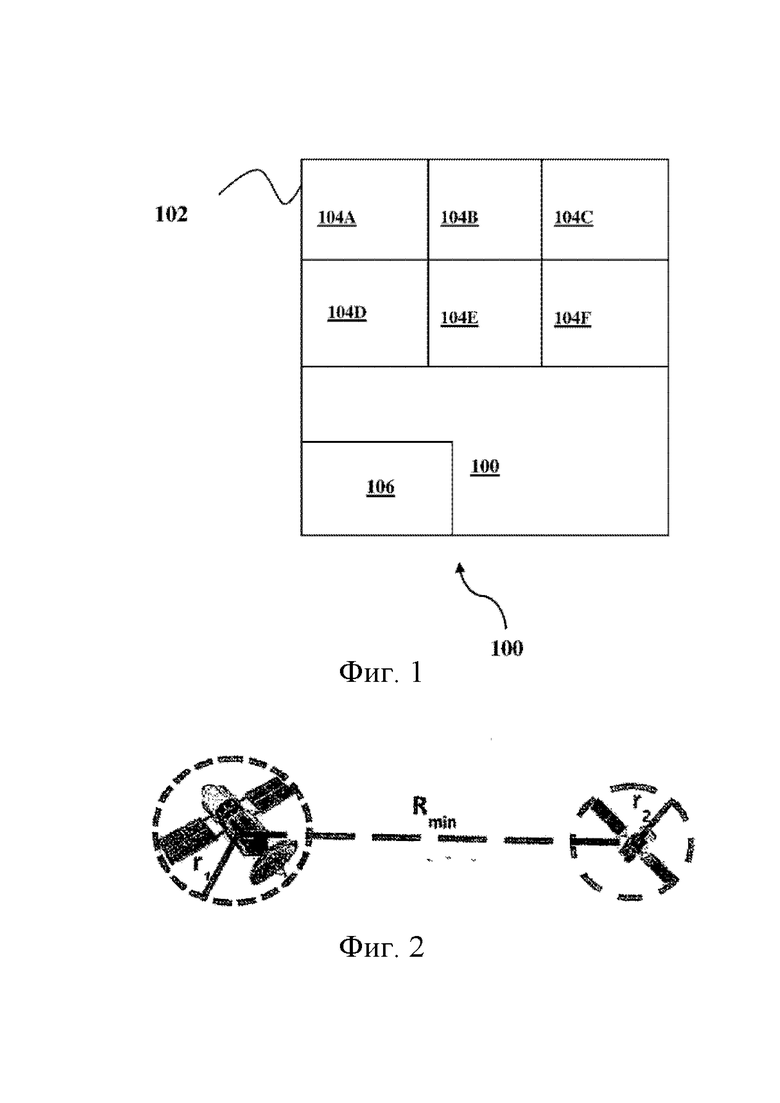
[0021] Фиг. 2 иллюстрирует схематическое представление, показывающее минимальное расстояние между двумя спутниками в соответствии с вариантом осуществления настоящего изобретения; и
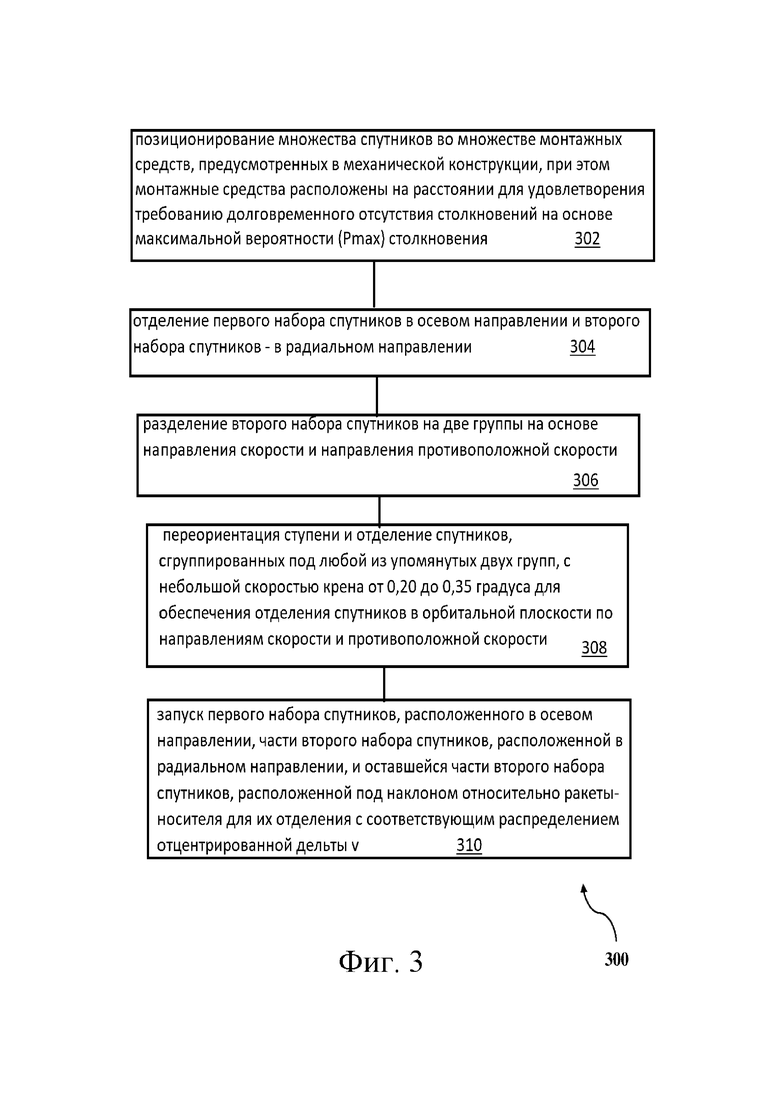
[0022] Фиг. 3 иллюстрирует блок-схему развертывания и запуска нескольких спутников с использованием механической конструкции на ракете-носителе в соответствии с вариантом осуществления настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0023] Настоящее изобретение будет описано ниже со ссылкой на прилагаемые чертежи. Здесь описаны система и способ запуска множества спутников с ракеты-носителя.
[0024] Нижеследующее описание представляет собой только примерный вариант осуществления изобретения и не ограничивает объем, применимость или конфигурацию изобретения. Скорее, нижеследующее описание предназначено для обеспечения удобной иллюстрации для реализации различных вариантов осуществления настоящего изобретения. Как станет очевидно, различные изменения могут быть внесены в функции и расположение структурных/рабочих признаков, описанных в этих вариантах осуществления, без отклонения от объема изобретения, изложенного в данном документе. Следует принимать во внимание, что приведенное здесь описание может быть адаптировано для использования с альтернативно сконфигурированными устройствами, имеющими другую форму, компоненты и т.п., и все же подпадать под объем настоящего изобретения. Таким образом, подробное описание здесь представлено только в целях иллюстрации, а не ограничения.
[0025] Фиг. 1 иллюстрирует систему 100 для запуска множества спутников с ракеты-носителя в соответствии с вариантом осуществления настоящего изобретения. Система 100 включает в себя механическую конструкцию 102, которая имеет одно или несколько монтажных средств 104A-F, блок 106 управления для управления одним или несколькими монтажными средствами для позиционирования и отделения множества спутников в механической конструкции, систему фиксации изображения для мониторинга позиционирования (не показана) каждого спутника в механической конструкции. Монтажные средства выполнены с возможностью позиционирования спутников в осевом, наклонном и радиальном отделениях на расстоянии, для предотвращения контакта каждого спутника друг с другом в течение короткого периода времени, а также в течение долгого периода времени орбитальной эволюции. Монтажные средства выполнено с возможностью размещения одного или нескольких спутников. Первый набор монтажных средств расположен в осевом отделении, второй набор монтажных средств расположен в наклонном отделении, а третий набор монтажных средств расположен в радиальном отделении.
[0026] Миссии по развертыванию множества спутников создают проблемы для конфигурации установки и проектирования последовательности отделения спутников для исключения возможности повторного контакта, поскольку предполагается большое количество тел, соответствующих спутникам и отработанным ступеням. Конфигурация монтажа будет иметь следующие ограничения.
1. Осевое отделение для некоторых спутников, наклонное отделение для некоторых других спутников, а также радиальное отделение для группы других спутников.
2. Монтаж радиально отделяющихся спутников для исключения взаимодействия струи рулевого двигателя верхней ступени и отделяемого спутника.
3. Никакая часть системы отделения, используемой для развертывания спутников, не должна блокировать путь спутникам, которые отделяются впоследствии.
[0027] Последовательность отделения спутников разработана с учетом следующих ограничений миссии в дополнение к вышеизложенному в отношении требований к монтажу.
1. Минимальное расстояние между всеми парами тел, чтобы обеспечить вероятность столкновения 1 из 100000 и положительный запас в монтажной конфигурации.
2. Спутники, отделяющиеся от одного и того же программного механизма, должны иметь задержку не менее 5 секунд.
3. Минимальное количество переориентаций, используемых для отделения спутников.
4. Минимальное время отделения всех спутников.
[0028] Чтобы добиться долговременного орбитального движения спутников без столкновений, сначала был выполнен расчет посредством аналитического размещения спутников должным образом как в пространстве, так и во времени. Позже интервалы времени между запусками спутников были настроены с использованием модели полной силы для орбитального распространения.
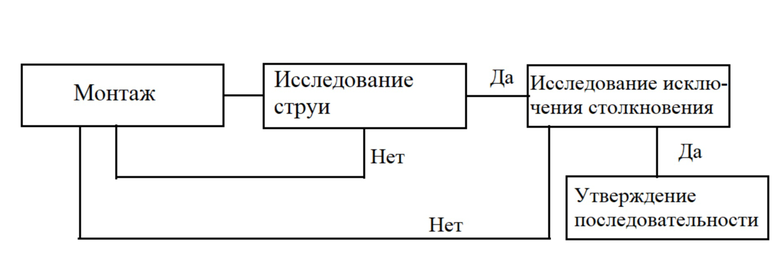
[0029] В настоящем изобретении отделение множества спутников выполняется за очень короткий промежуток времени (не превышающий 10000 секунд от момента отключения конечной ступени) с вероятностью столкновения 1 из 100000 на основе расстояния между любыми двумя парами тел относительно их развернутых размеров. Также отделенные тела не взаимодействуют со струей системы управления разгонной ступени. Стратегия миссии пояснена помощью блок-схемы, показанной ниже.
[0030] Разработан новый способ вычисления расстояния между спутниками для любой заданной вероятности столкновения. Расчеты безопасного расстояния повторного контакта:
[0031] Характерный радиус спутника/верхней ступени - это радиус охватывающей его сферы. Пусть r1 и r2 - характерные радиусы двух рассматриваемых спутников [см. фиг. 2], Rmin - минимальное расстояние между ними, а Rs - эффективный радиус столкновения (=r1 + r2). Максимальная вероятность столкновения определяется как:
[0032] Пороговое значение вероятности столкновения для анализа близости космических объектов (SOPA) составляет 1 из 1000, а для предотвращения столкновений (COLA) составляет 1 из 100000 на орбитальной фазе. Пороговое значение вероятности столкновения для COLA является умеренным для учета включенных неопределенностей, тогда как для обычных SOPA и SOPA для орбитальных маневров оно ослаблено. Изобретение обеспечивает новое решение для отделения множества спутников малой массы на круговую орбиту.
[0033] Для спутников, отделяющихся с одинаковой дельта-v, отцентрированный компонент дельта-v отделения может быть сконфигурирован путем выбора соответствующего направления отделения. Для достижения систематической последовательности отделения все спутники отделяют в орбитальной плоскости. Отцентрированные компоненты дельта-v располагаются в желаемом порядке (по убыванию или по возрастанию) посредством выбора соответствующего направления отделения в орбитальной плоскости. Чтобы избежать кратковременного обгона спутниками, требуется, чтобы они имели отцентрированную дельту v в порядке убывания их величины.
[0034] Спутники, отделяющиеся в противоположном направлении, всегда будут иметь разницу во времени между ними, за исключением случая отделения точно в радиальном направлении. Следовательно, спутники разделяют на две группы: одну отделяют в направлении скорости, а другую - в направлении противоположной скорости, и определяют последовательность временных интервалов для одной группы спутников и отделяют другую одновременно с теми же временными интервалами. Небольшая скорость крена от 0,20 до 0,35 град/с используется для получения желаемого угла отделения в орбитальной плоскости. Упомянутая методология расчета используется только для радиального отделения. Для осевого отделения все спутники отделяют в фиксированном оптимальном положении, чтобы соответствовать желаемому минимальному расстоянию.
[0035] После отделения спутников в осевом направлении выполняется переориентация верхней ступени для обеспечения отделения других спутников в орбитальной плоскости по направлениям скорости и противоположной скорости. Дифференциальная скорость между двумя отделяющими парами обеспечивается отделением их по направлениям скорости и противоположной скорости. Продольная ось носителя совпадает с нормальным направлением орбиты, а затем поворачивается со скоростью от 0,20 до 0,35 град/с, причем время отделения выбирается так, чтобы достигалось направление отделения в орбитальной плоскости, обеспечивающее разность отцентрированной дельта-v между двумя отделениями в одном направлении. Это обеспечивает отсутствие контакта двух отделяющихся спутников друг с другом как в течение короткого, так и длинного периода времени эволюции орбиты.
[0036] Указанная последовательность работает, даже если носитель не вращается за счет поворота вектора скорости от 0 до 360 градусов на одной орбите. Направление отделения спутников будет изменяться естественным образом по отношению к локальной плоскости, обеспечивая эффект естественного вращения носителя (при условии, что продольная ось носителя совпадает с вектором нормали орбиты) с соответствующей скоростью для круговой орбиты. Эта скорость дополнительно доступна и для случая преднамеренной скорости крена. Из-за очень низкой скорости отделение займет больше времени. Этот способ также включает в себя визуализацию всех событий отделения спутников с помощью надлежащим образом расположенных камер.
[0037] Например, сборка 25 счетверенных групп (содержащих 101 спутник), двух наноспутников ISRO и главного спутника была размещена симметрично относительно оси рыскания носителя так, что ни один из отделяющихся спутников не мог попасть в струю системы управления за счет самого монтажа. Затем вычисляется минимальное расстояние между каждой парой спутников с использованием сферы, охватывающей максимальный развернутый размер каждого спутника, чтобы гарантировать вероятность столкновения 1 из 100000. Последовательность отделения рассчитана с намеренной скоростью крена, чтобы отделить два радиально отделяющих спутника одновременно в направлениях скорости и противоположной скорости с конечным промежутком времени, тем самым обеспечивая увеличение указанных промежутков на первых 10 орбитах для всех 5460 пар объектов.
[0038] Фиг. 3 иллюстрирует блок-схему 300 развертывания и запуска нескольких спутников с использованием механической конструкции на ракете-носителе в соответствии с вариантом осуществления настоящего изобретения. На этапе 302 позиционируют множество спутников в одном или нескольких монтажных средствах, предусмотренных в механической конструкции, при этом монтажные средства расположены на расстоянии для удовлетворения требованию долговременного отсутствия столкновений на основе максимальной вероятности (Pmax) столкновения. На этапе 304 отделяют от множества спутников первый набор спутников в осевом направлении и второй набор спутников в радиальном направлении. На этапе 306 второй набор спутников разделяют на две группы на основе направления скорости и направления противоположной скорости. На этапе 308 переориентируют и отделяют спутники, сгруппированные под любой из двух групп, с небольшой скоростью крена от 0,20 до 0,35 градуса для обеспечения отделения спутников в орбитальной плоскости по направлениям скорости и противоположной скорости. На этапе 310 запускают первый набор спутников, расположенный в осевом направлении, часть упомянутого второго набора спутников, расположенную в радиальном направлении, и оставшуюся часть упомянутого второго набора спутников, расположенную под наклоном относительно упомянутой ракеты-носителя, для их отделения с соответствующим распределением отцентрированной дельты v. Система формирования видеоизображения смонтирована и позиционирована так, что обеспечивает возможность фиксации всех событий отделения. На этапе отделения обеспечивают отделение всех спутников в оптимальном положении для соблюдения желаемого минимального расстояния для всех отделений. На этапе переориентации управляемость скоростью крена достигает от 0,20 до 0,35 градуса для обеспечения желаемого угла и направления отделения в орбитальной плоскости. Скорость крена и время отделения выбирают так, чтобы достигалось направление отделения в орбитальной плоскости, обеспечивающее желаемую разность отцентрированной дельта-v между двумя отделениями, для предотвращения контакта двух отделяющихся спутников друг с другом как в течение короткого, так и длинного периода времени эволюции орбиты. Этап отделения предотвращает взаимодействие между струей рулевого двигателя верхней ступени и отделяющимися спутниками.
[0039] Вариант осуществления настоящего изобретения упрощает систему и методологию безопасного развертывания множества спутников за короткий промежуток времени. Способ включает расчет монтажной конфигурации для множества спутников для обеспечения безопасного отделения и конфигурации последовательности отделения с маневрированием для обеспечения надлежащего отделения множества спутников, безопасного перемещения между отделенными спутниками и предотвращения любого взаимодействия между спутниками и струей системы управления ракеты-носителя во время отделения. Направление отделения спутников определено таким образом, чтобы после отделения они не могли попасть в струю системы управления. После завершения этого этапа, выполняется анализ близости, чтобы получить достаточный промежуток между отделяющими спутниками, регулируя время отделения. Этот способ также включает в себя фиксацию видеоизображений всех событий отделения спутников с использованием систем формирования видеоизображения, позиционированных надлежащим образом. Технические преимущества варианта осуществления настоящего изобретения заключаются в следующем:
1. Достигнуто осевое отделение первой группы спутников, подлежащих отделению, наклонное отделение второй группы спутников, подлежащих отделению, и радиальное отделение остальных спутников.
2. Обеспечено завершение отделения спутников в течение короткого периода миссии с вероятностью столкновения 1 из 100000 после выключения двигателей ступени по сравнению с нормальной последовательностью без указанного маневра.
3. Обеспечивается минимальная временная задержка для спутников, отделяющихся от одного и того же программного механизма.
4. Для отделения спутников используется минимальное количество переориентаций.
5. Обеспечивается, что все отделенные спутники имеют постоянно увеличивающийся разрыв между собой на первых 10 орбитах.
[0040] Следует понимать, что представленное выше описание предназначено для иллюстрации и не является ограничивающим. Многие другие варианты осуществления будут очевидны специалистам в данной области техники после прочтения и понимания приведенного выше описания. Хотя настоящее изобретение было описано со ссылкой на конкретные примерные варианты осуществления, следует понимать, что изобретение не ограничивается описанными вариантами осуществления, но может быть реализовано на практике с модификациями и изменениями в пределах сущности и объема прилагаемой формулы изобретения. Соответственно, описание и чертежи следует рассматривать в иллюстративном смысле, а не в ограничительном смысле. Следовательно, объем изобретения должен определяться со ссылкой на прилагаемую формулу изобретения, а также на полный объем эквивалентов, на которые распространяется такая формула изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ИЛИ ВОЗВРАТА ИСКУССТВЕННЫХ СПУТНИКОВ | 2012 |
|
RU2600971C2 |
| СИСТЕМА ЗАПУСКА ПОЛЕЗНОЙ НАГРУЗКИ НА НИЗКУЮ ОКОЛОЗЕМНУЮ ОРБИТУ | 1997 |
|
RU2191145C2 |
| РАКЕТА-НОСИТЕЛЬ МНОГОКРАТНОГО ИСПОЛЬЗОВАНИЯ И МНОГОКОМПОНОВОЧНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 1991 |
|
RU2035358C1 |
| СПОСОБ ВЫПУСКА ИСКУССТВЕННЫХ СПУТНИКОВ НА ЗЕМНУЮ ОРБИТУ | 2018 |
|
RU2770256C2 |
| КОСМИЧЕСКАЯ ГОЛОВНАЯ ЧАСТЬ ДЛЯ ГРУППОВОГО ЗАПУСКА СПУТНИКОВ | 2010 |
|
RU2428358C1 |
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКИХ АППАРАТОВ НА ОРБИТУ | 2023 |
|
RU2794486C1 |
| СИСТЕМА ЗАПУСКА И ТРАНСПОРТИРОВАНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 1999 |
|
RU2233772C2 |
| СПОСОБ ОТДЕЛЕНИЯ ПОЛЕЗНЫХ НАГРУЗОК ОТ ОРБИТАЛЬНОЙ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ С ЖИДКОСТНЫМ РАКЕТНЫМ ДВИГАТЕЛЕМ | 2020 |
|
RU2748079C1 |
| СПОСОБ УПРАВЛЕНИЯ АВИАЦИОННО-КОСМИЧЕСКОЙ СИСТЕМОЙ ДЛЯ ВЫВЕДЕНИЯ ПОЛЕЗНОГО ГРУЗА | 1999 |
|
RU2160214C1 |
| СПОСОБ ОТДЕЛЕНИЯ СПУТНИКОВ И РАЗВЕДЕНИЯ ИХ НА ОРБИТЕ ПРИ ГРУППОВОМ ЗАПУСКЕ ОДНОЙ РАКЕТОЙ | 1994 |
|
RU2111901C1 |
Изобретение относится к области ракетно-космической техники, а именно к способам развертывания и запуска спутников с использованием механической конструкции на ракете-носителе. Способ включает в себя позиционирование спутников в монтажных средствах, расположенных на расстоянии друг от друга для предотвращения столкновения. Далее отделяют первый набор спутников в осевом направлении и второй набор спутников в радиальном направлении. Разделяют второй набор спутников на две группы. Переориентируют ступень и отделяют спутники с небольшой скоростью крена от 0,20 до 0,35 градуса. Запускают упомянутый первый набор спутников, расположенный в осевом направлении, часть упомянутого второго набора спутников, расположенного в радиальном направлении, и оставшуюся часть упомянутого второго набора спутников, расположенного под наклоном относительно упомянутой ракеты-носителя. Достигается возможность отделения множества спутников в течение короткого промежутка времени без столкновения между собой и со струей двигателя ракеты с возможностью видеофиксации. 5 з.п. ф-лы, 3 ил.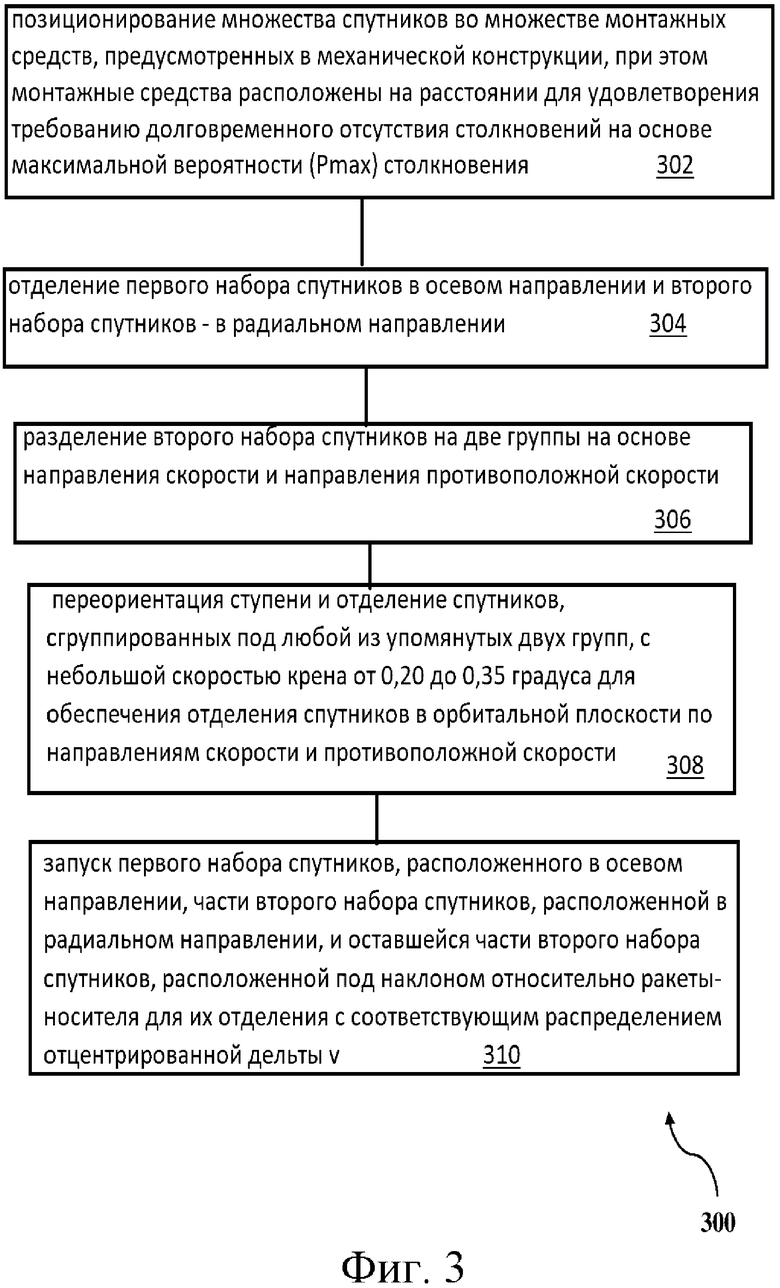
1. Способ развертывания и запуска спутников с использованием механической конструкции на ракете-носителе, включающий следующие этапы:
позиционирование указанных спутников в монтажных средствах, предусмотренных в указанной механической конструкции, при этом указанные монтажные средства расположены на расстоянии для удовлетворения требованию долговременного отсутствия столкновений на основе максимальной вероятности (Pmax) столкновения;
отделение первого набора спутников в осевом направлении и второго набора спутников в радиальном направлении;
разделение второго набора спутников на две группы на основе направления скорости и направления противоположной скорости;
переориентация ступени и отделение спутников, сгруппированных под любой из упомянутых двух групп, с небольшой скоростью крена от 0,20 до 0,35 градуса для обеспечения отделения спутников в орбитальной плоскости по направлениям скорости и противоположной скорости;
запуск упомянутого первого набора спутников, расположенного в осевом направлении, части упомянутого второго набора спутников, расположенной в радиальном направлении, и оставшейся части упомянутого второго набора спутников, расположенной под наклоном относительно упомянутой ракеты-носителя, для их отделения с соответствующим распределением отцентрированной дельты-v.
2. Способ по п.1, в котором систему формирования видеоизображения монтируют и позиционируют так, что она обеспечивает возможность фиксации всех событий отделения.
3. Способ по п.1, в котором на упомянутом этапе отделения обеспечивают отделение всех спутников в оптимальном положении для соблюдения желаемого минимального расстояния для всех отделений.
4. Способ по п.1, в котором на упомянутом этапе переориентации управляемость скоростью крена достигает от 0,20 до 0,35 градуса для обеспечения желаемого угла и направления отделения в орбитальной плоскости.
5. Способ по п.4, в котором скорость крена и время отделения выбирают так, чтобы достигалось направление отделения в орбитальной плоскости, обеспечивающее желаемую разность отцентрированной дельты-v между двумя отделениями, для предотвращения контакта двух отделяющихся спутников друг с другом как в течение короткого, так и длинного периода времени эволюции орбиты.
6. Способ по п.1, в котором указанный этап отделения предотвращает взаимодействие между струей рулевого двигателя верхней ступени и отделяющимися спутниками.
| Способ введения жидких лекарственных веществ в биоткань | 2022 |
|
RU2805245C1 |
| US 8888050 B1, 18.11.2014 | |||
| JP 2005075209 A, 24.03.2005 | |||
| US 9463882 B1, 11.10.2016 | |||
| Chobotov, V | |||
| A | |||
| Предохранительное устройство для паровых котлов, работающих на нефти | 1922 |
|
SU1996A1 |
| Orbital Mechanics Second Edition | |||
| AIAA Education Series, Reston, VA: American Institute of Aeronautics and Astronautics | |||
| СПОСОБ ОТДЕЛЕНИЯ СПУТНИКОВ И РАЗВЕДЕНИЯ ИХ НА ОРБИТЕ ПРИ ГРУППОВОМ ЗАПУСКЕ ОДНОЙ РАКЕТОЙ | 1994 |
|
RU2111901C1 |
