ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0001] Эта заявка является родственной патенту США №9545869, выданному 17 января 2017 г., и ее приоритет испрашивается по дате подачи предварительной заявки США №62/664918, поданной 30 апреля 2018 г., раскрытие которой полностью включено в настоящий документ посредством ссылки.
[0002] Настоящее изобретение относится к устройству для погрузки и разгрузки грузов, оборудования, материалов, инструментов, мульчи, верхнего почвенного слоя, мусора и т.д. (обычно называемых в дальнейшем грузом) из пространства или кузова грузового автомобиля (обычно называемого в дальнейшем кузовом грузового автомобиля), внедорожника, хэтчбэка транспортного средства и т.д. (обычно называемых в дальнейшем транспортным средством). Существует необходимость в платформе транспортного средства, контейнере, контейнере для хранения или тому подобном, которые могут быть легко погружены в кузов грузового автомобиля или выгружены из кузова, или же, в качестве альтернативы, повернуты относительно транспортного средства для вываливания их содержимого. Патент США №9545869 описывает соответствующую систему и устройство для погрузки / разгрузки или вываливания груза из кузова грузового автомобиля. Однако существует необходимость в создании устройства, которое обеспечивает также дополнительные усовершенствования и другие свойства и преимущества.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Достоинства и преимущества настоящего изобретения будут более очевидными при прочтении и понимании последующего подробного описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
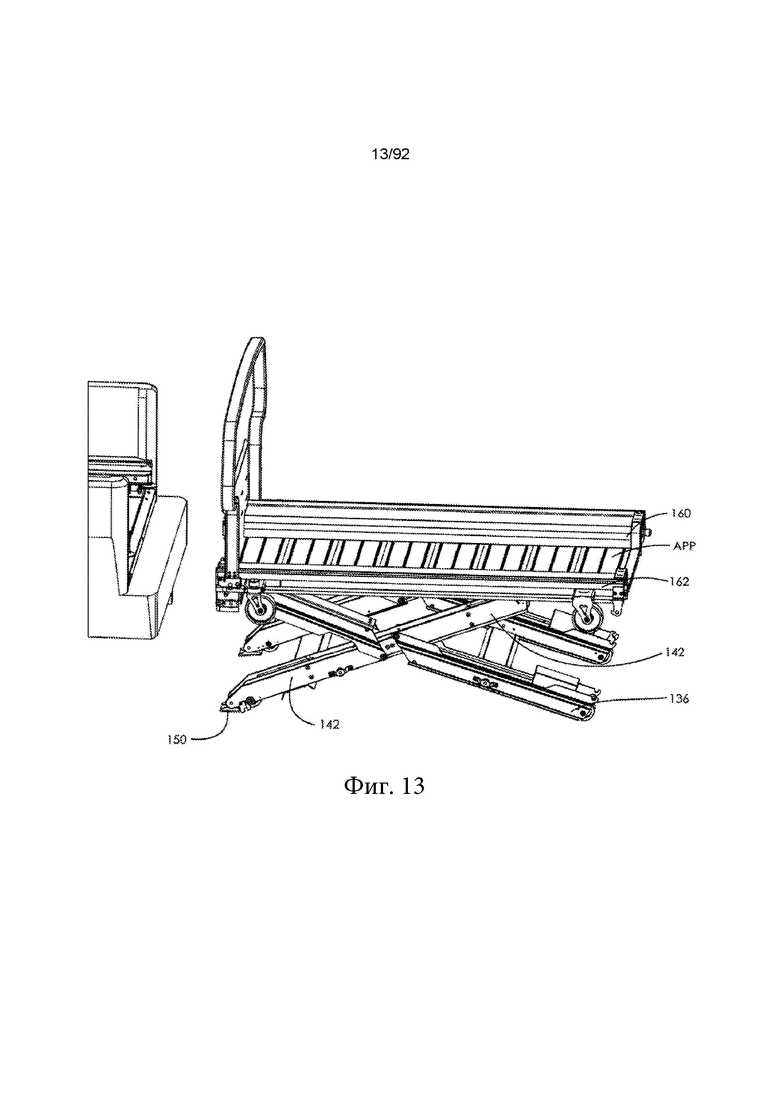
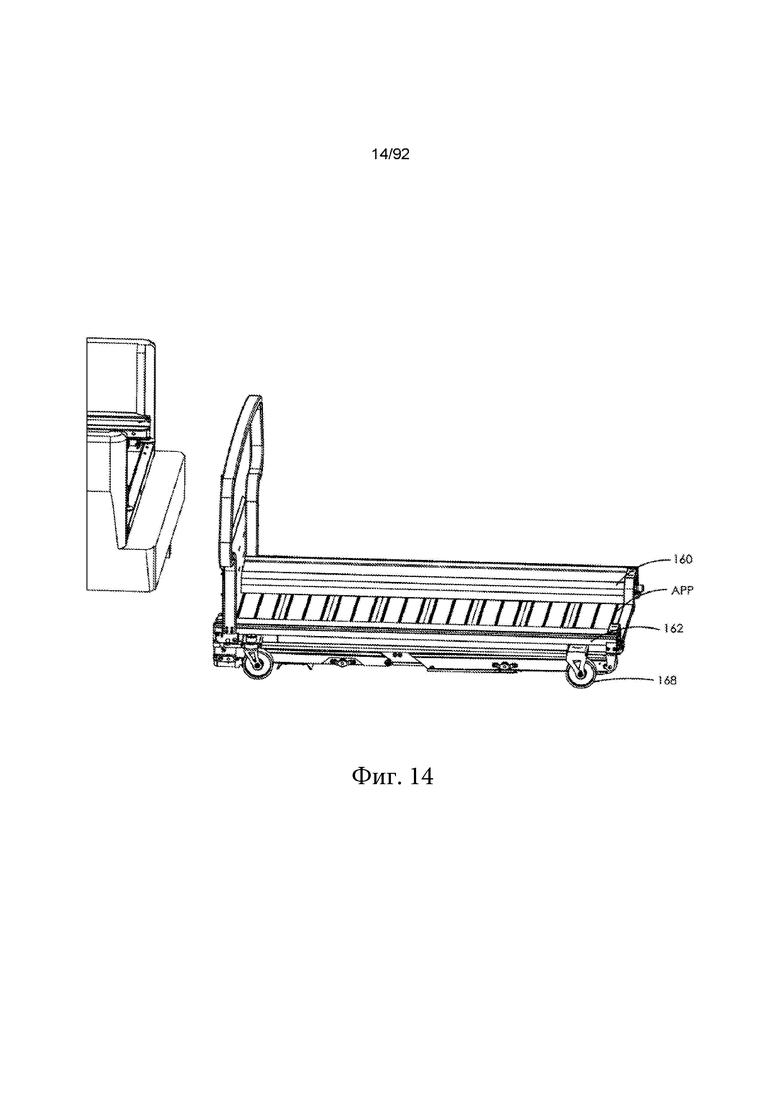
[0004] Фиг. 1-14 являются изображениями, которые иллюстрируют ряд последовательных этапов разгрузки или перемещения средства транспортировки груза или грузовой платформы из кузова грузового автомобиля (и аналогично, наоборот, чертежи с Фиг. 14 по Фиг. 1 иллюстрируют последовательные этапы погрузки средства транспортировки груза или контейнера в кузов грузового автомобиля).
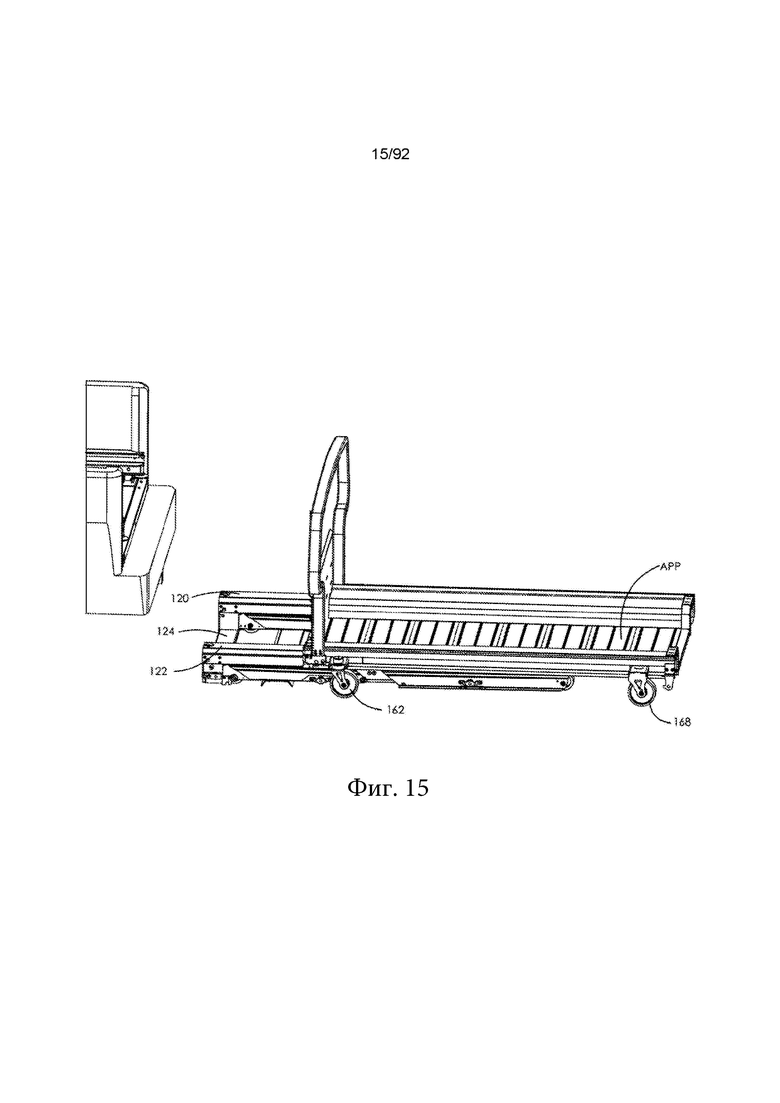
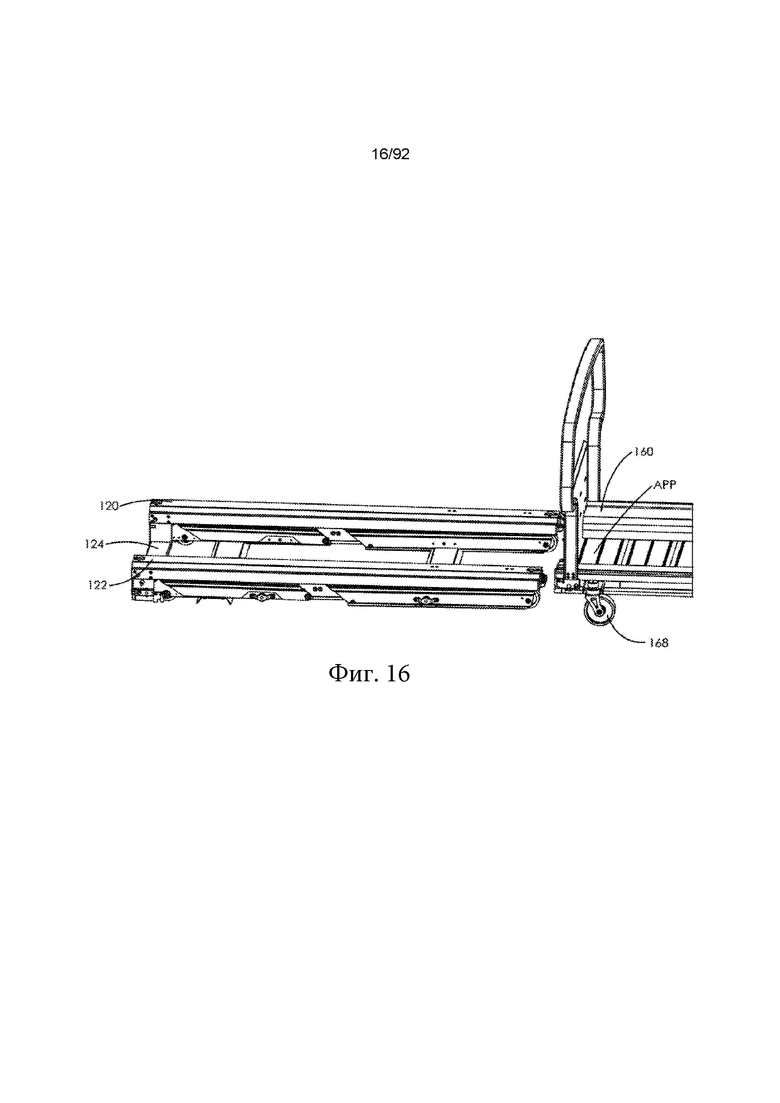
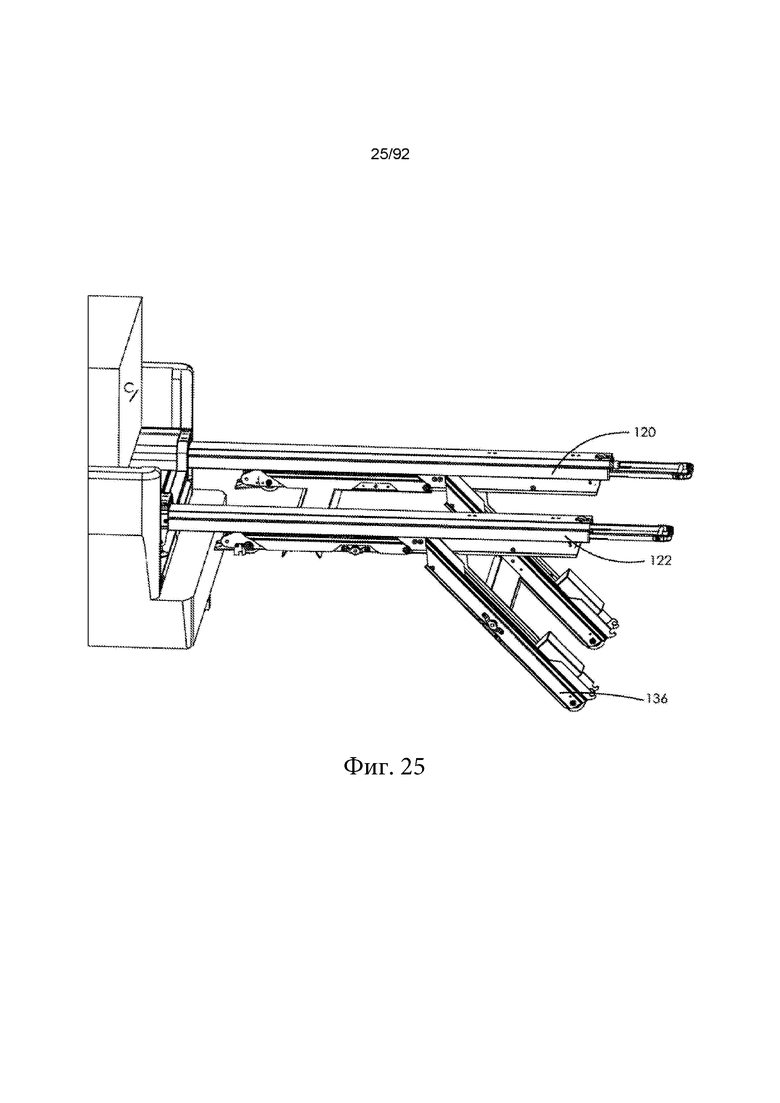
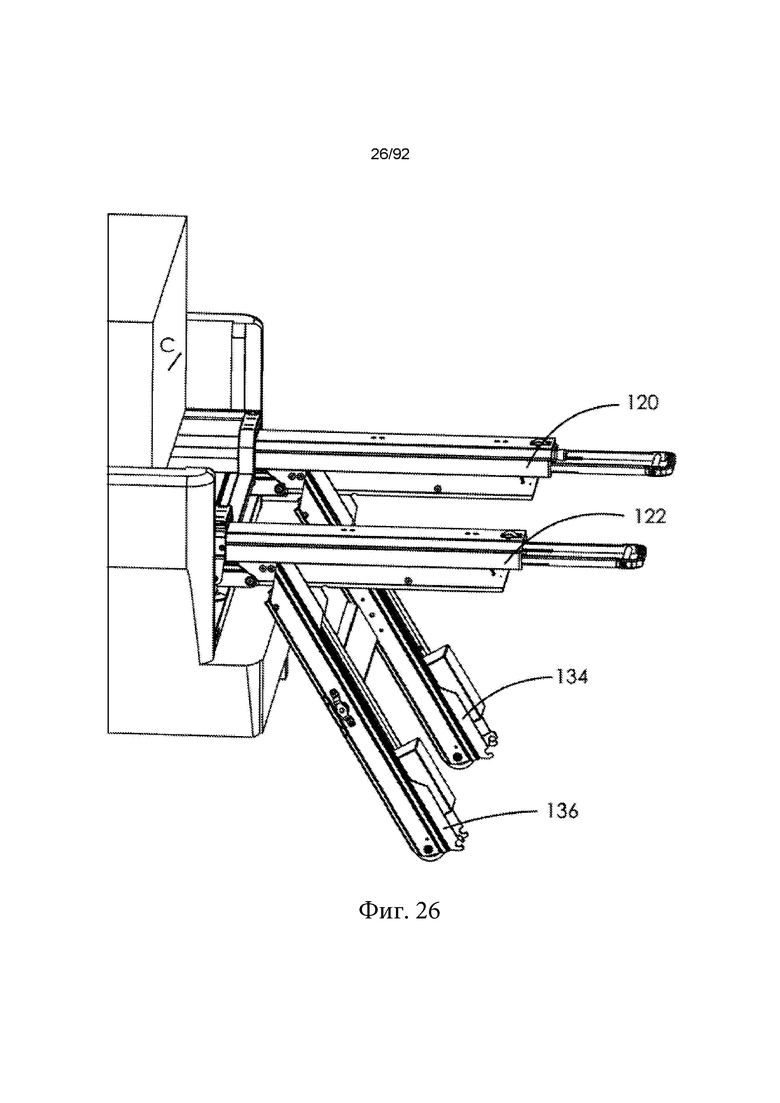
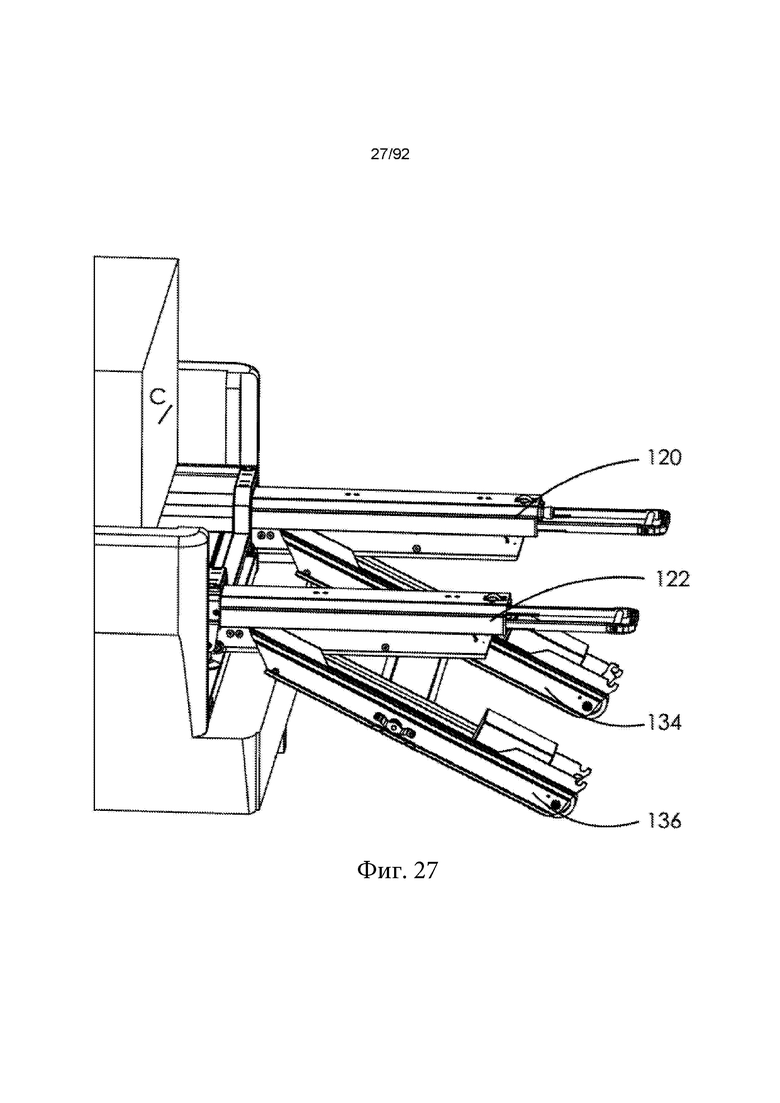
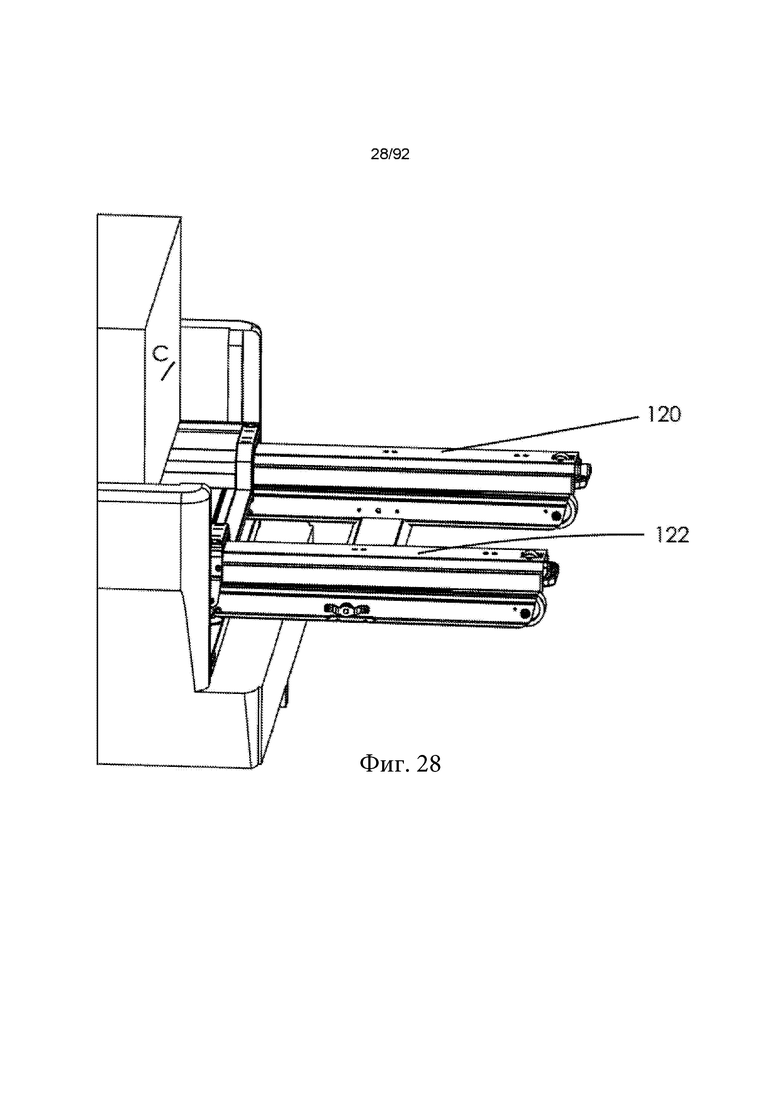
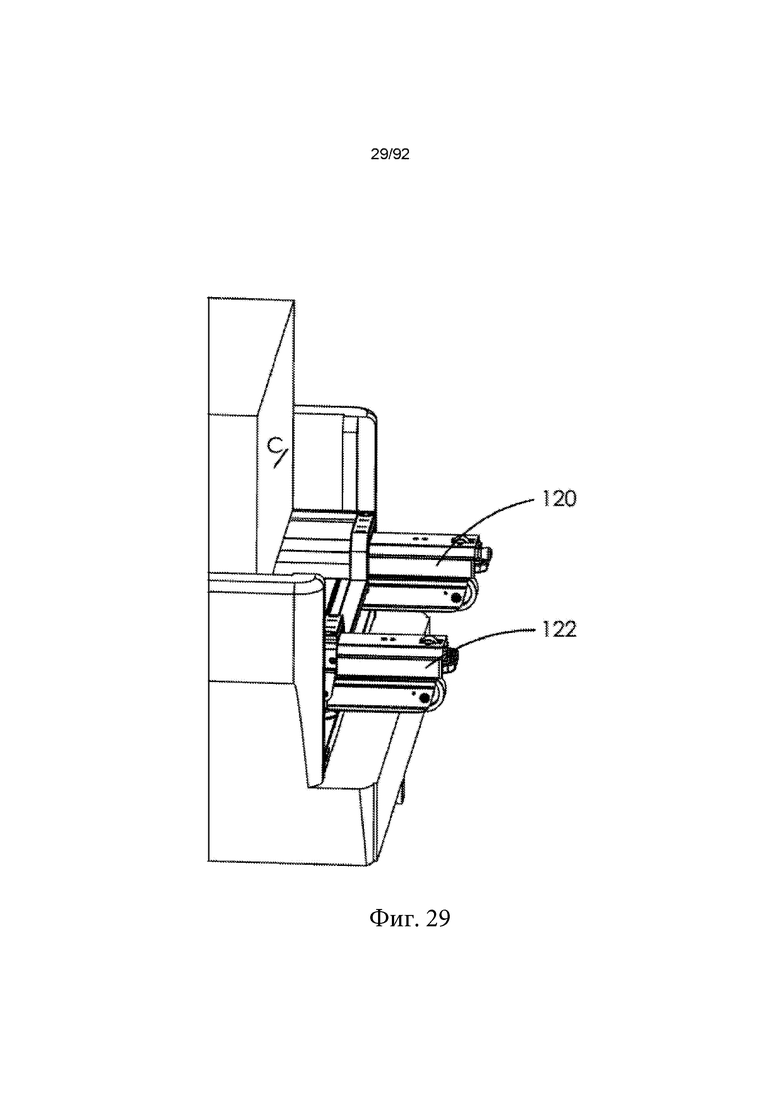
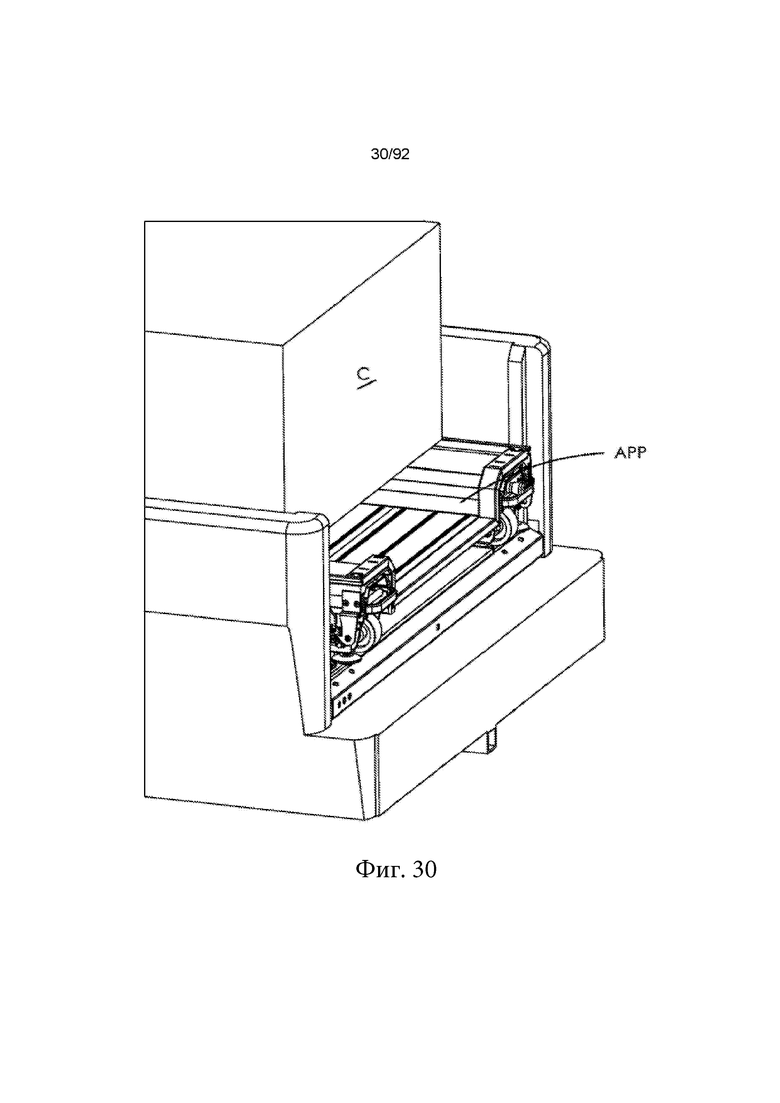
[0005] Фиг. 15-30 иллюстрируют последовательные этапы погрузки средства транспортировки / контейнера с грузом в кузов грузового автомобиля.
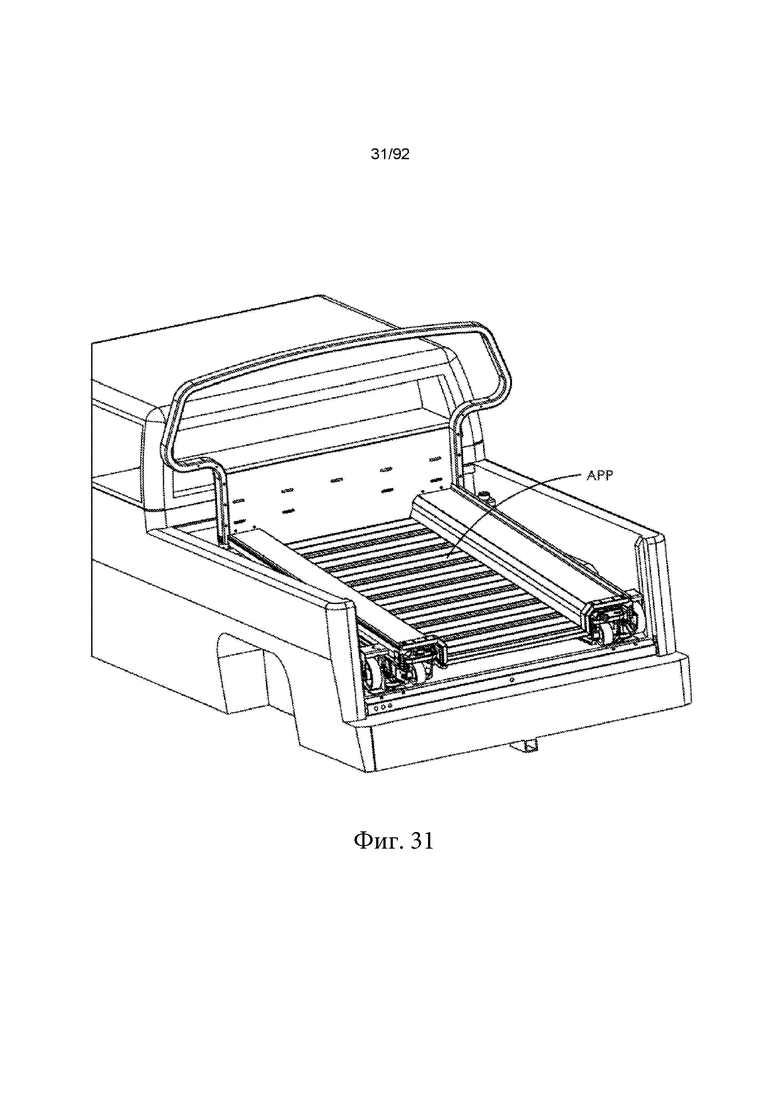
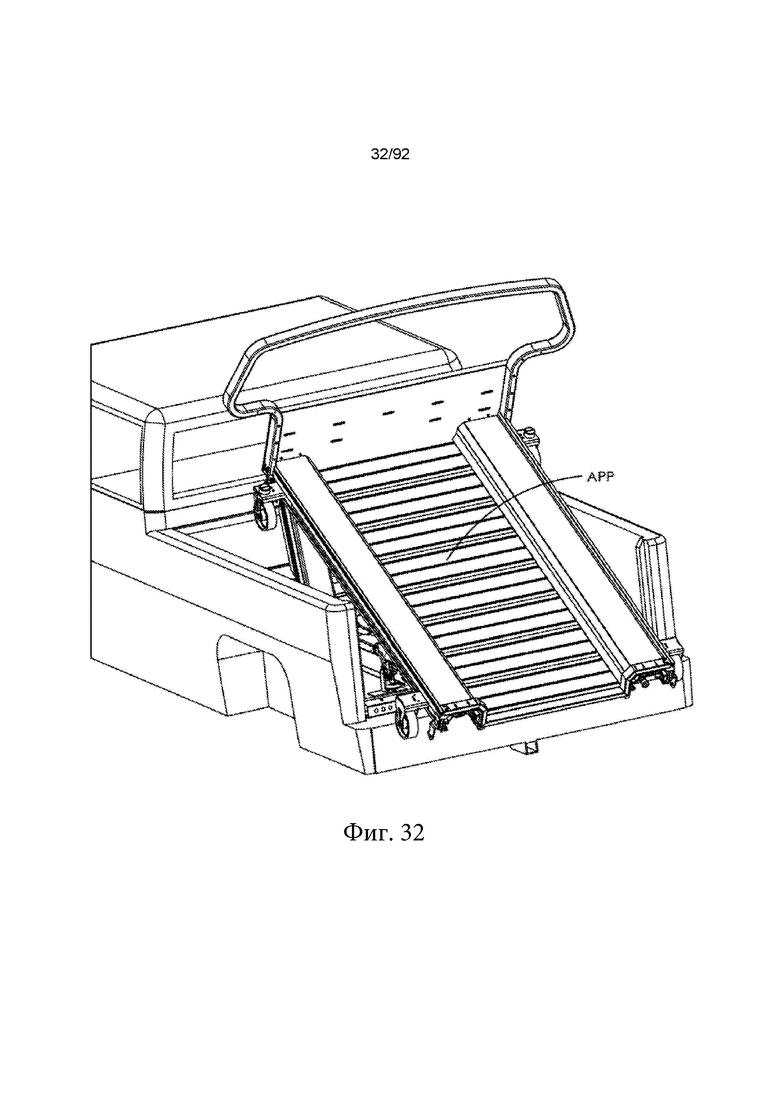
[0006] Фиг. 31-32 иллюстрируют, как средство транспортировки / контейнер может быть выборочно наклонен относительно кузова грузового автомобиля.
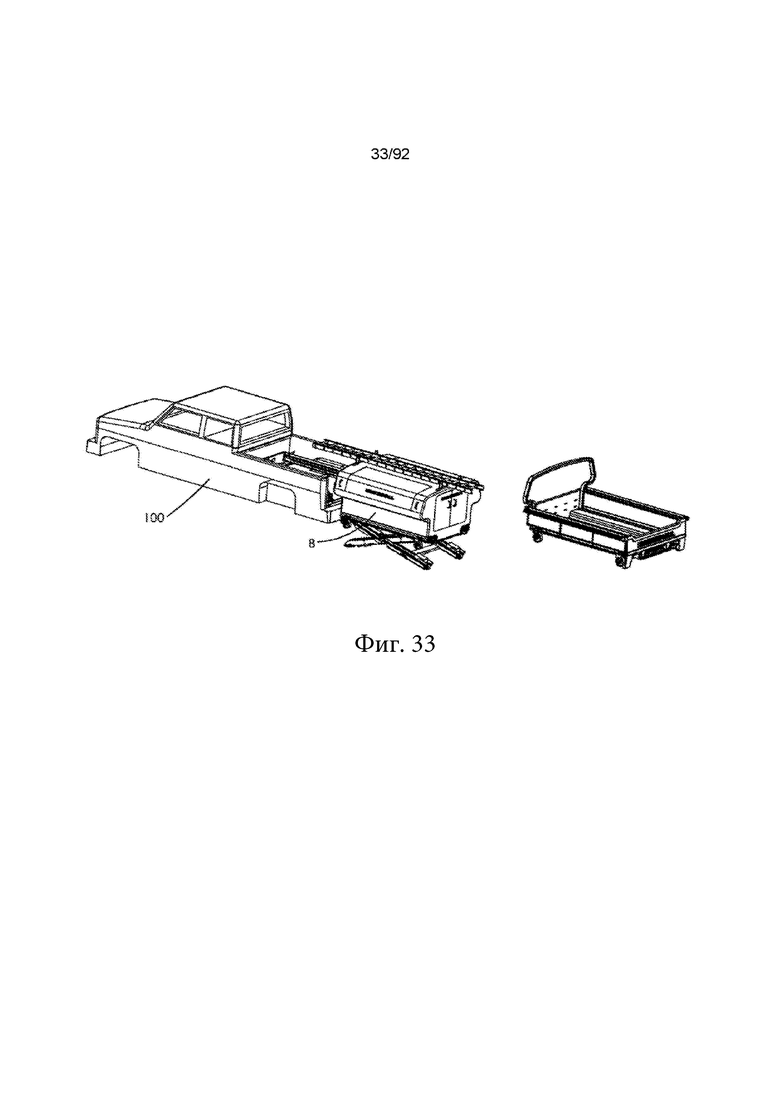
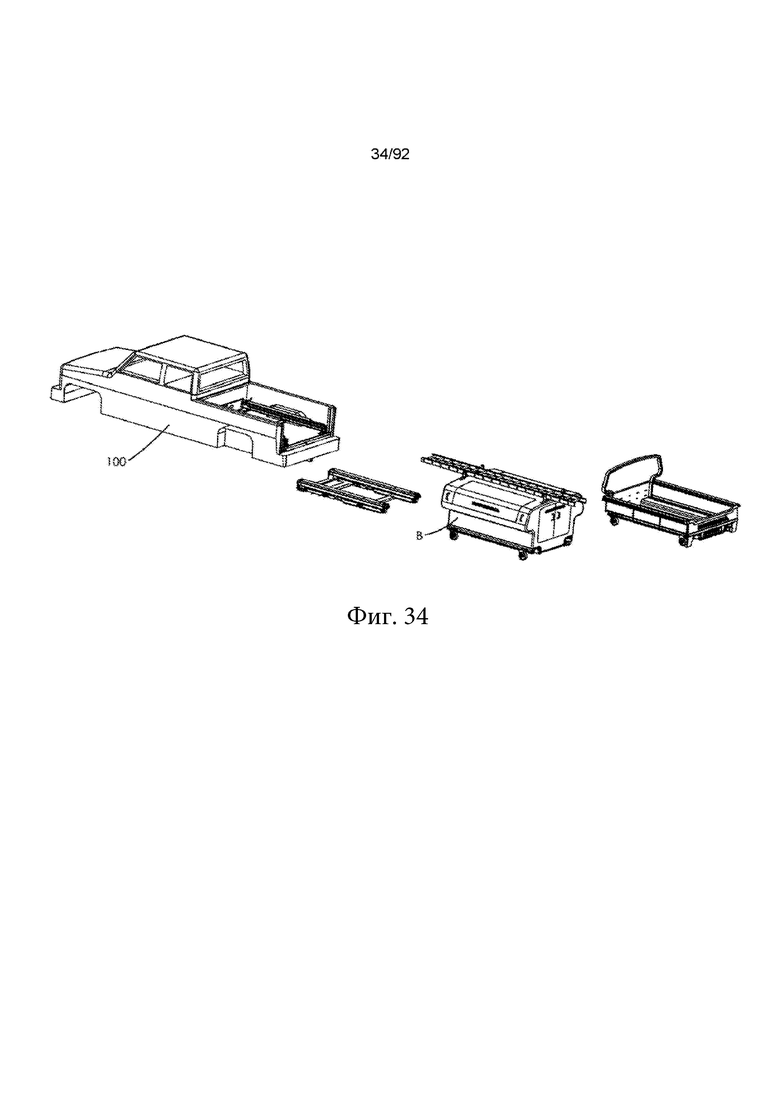
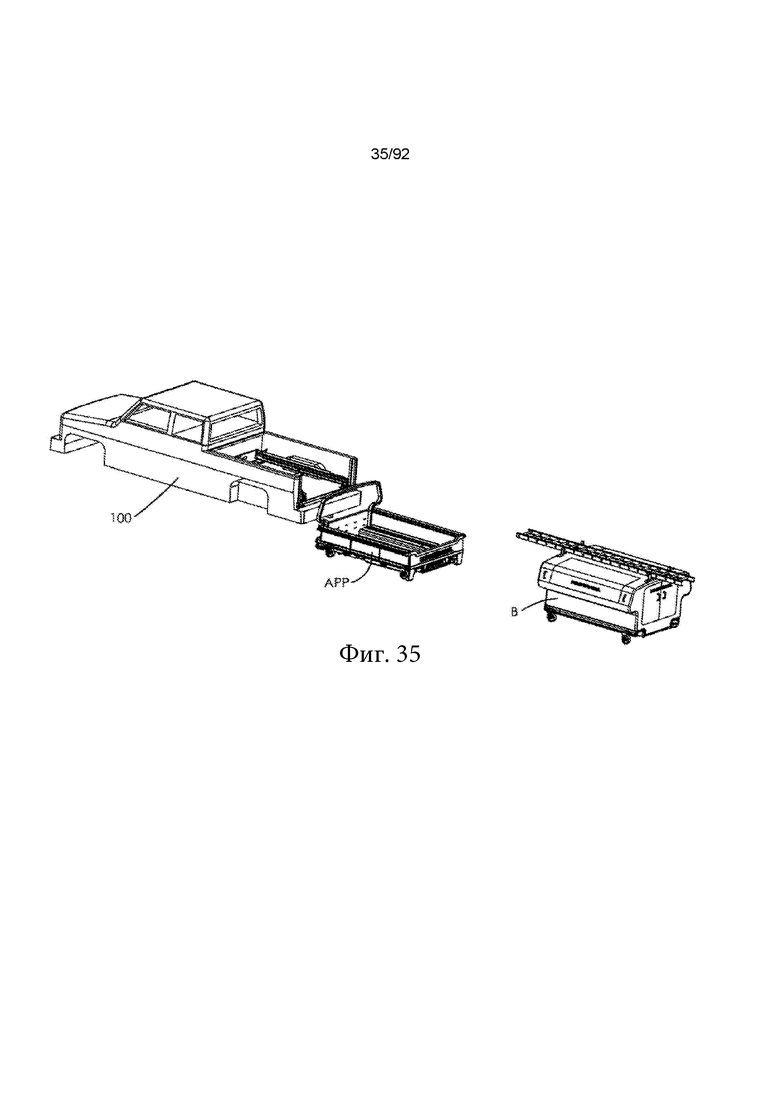
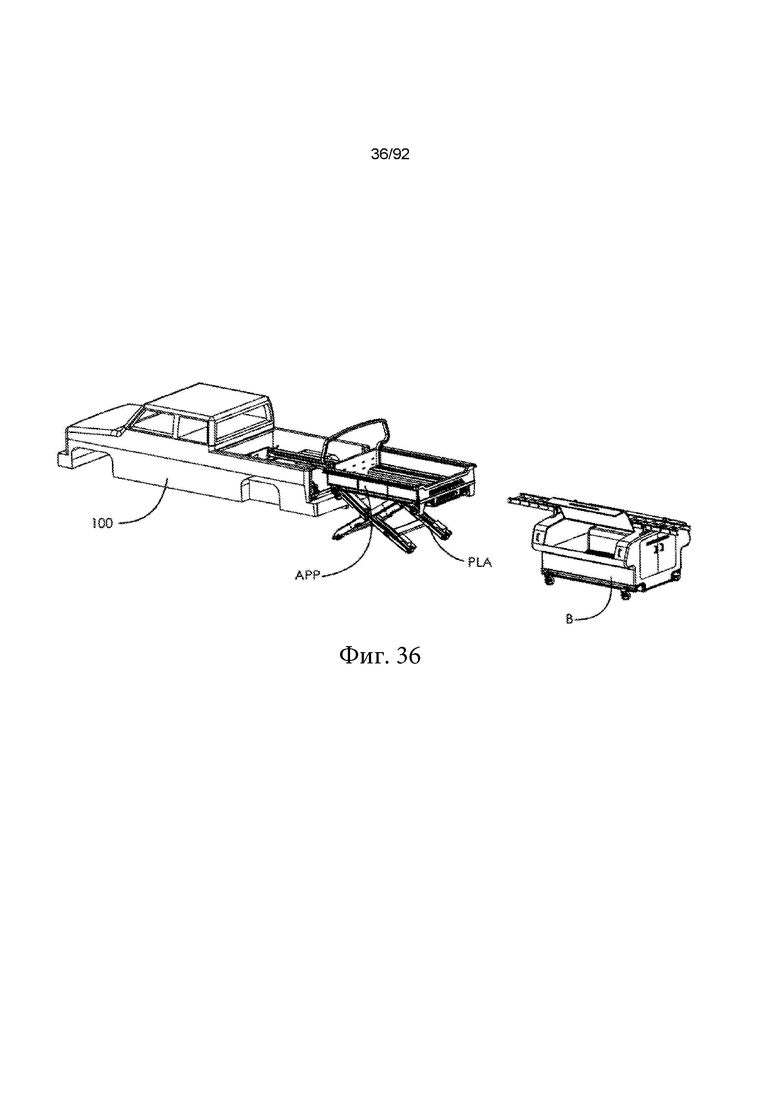
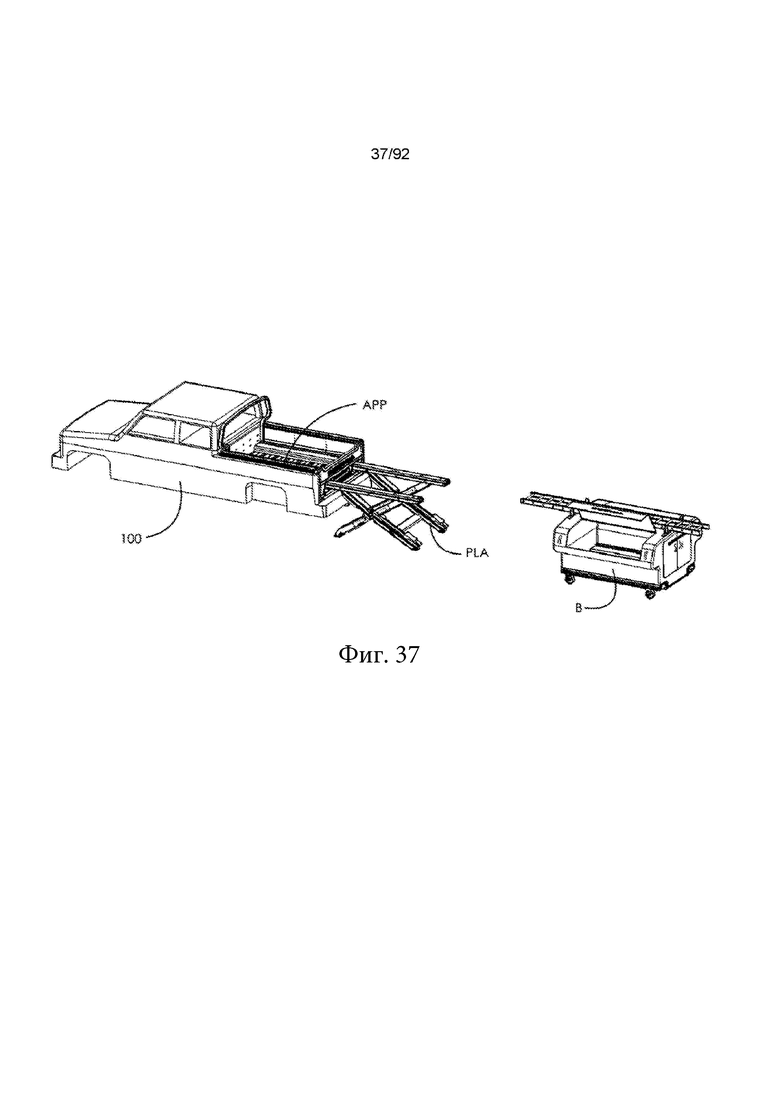
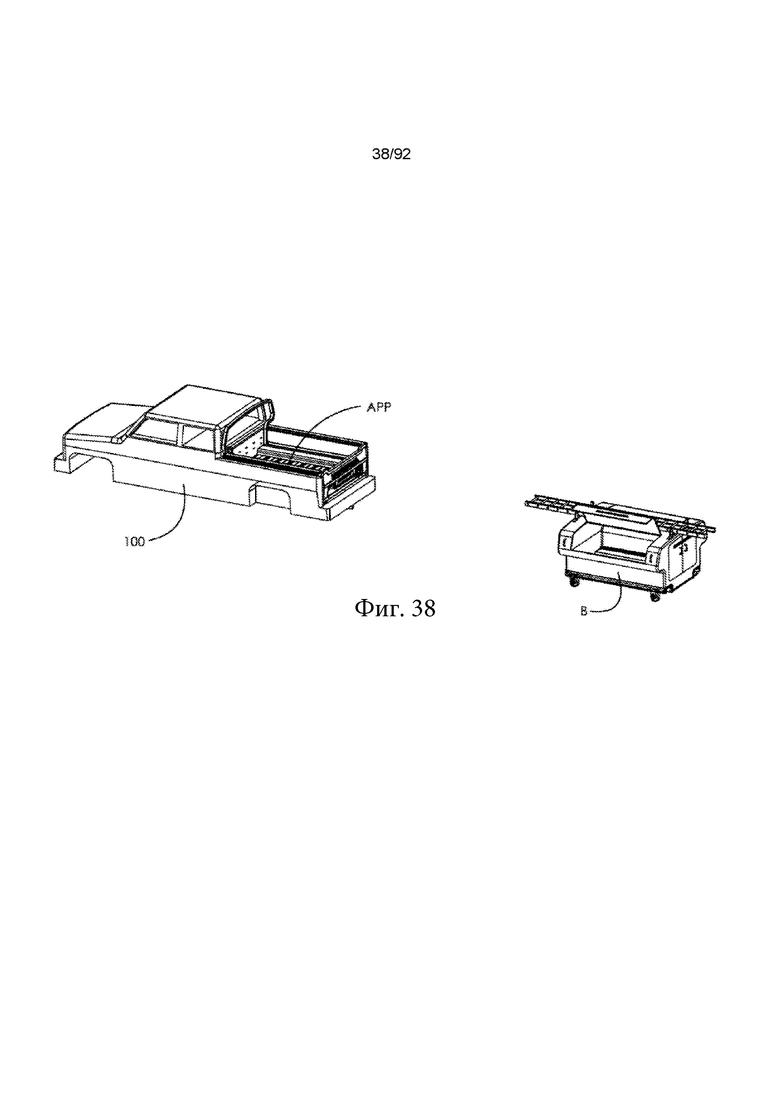
[0007] Фиг. 33-38 иллюстрируют, как груз или материалы могут быть разгружены, погружены или переставлены на рабочем участке.
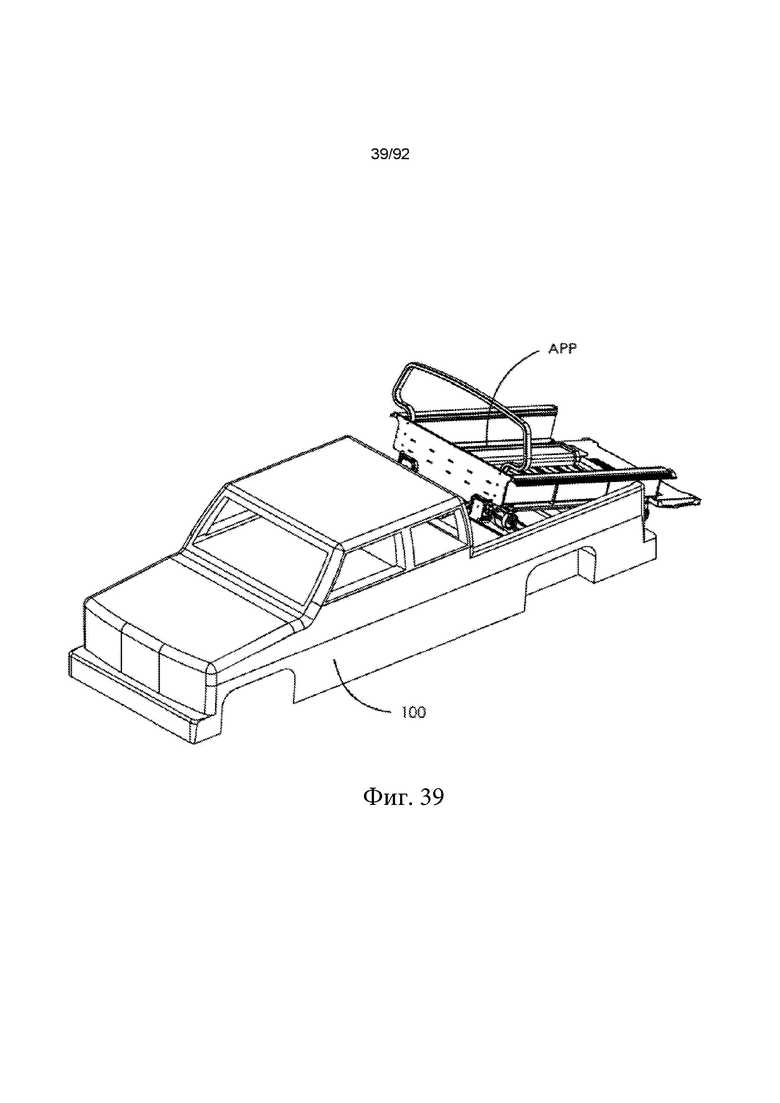
[0008] Фиг. 39 изображает средство транспортировки / контейнер в режиме вываливания груза для разгрузки платформы / контейнера на рабочем участке.
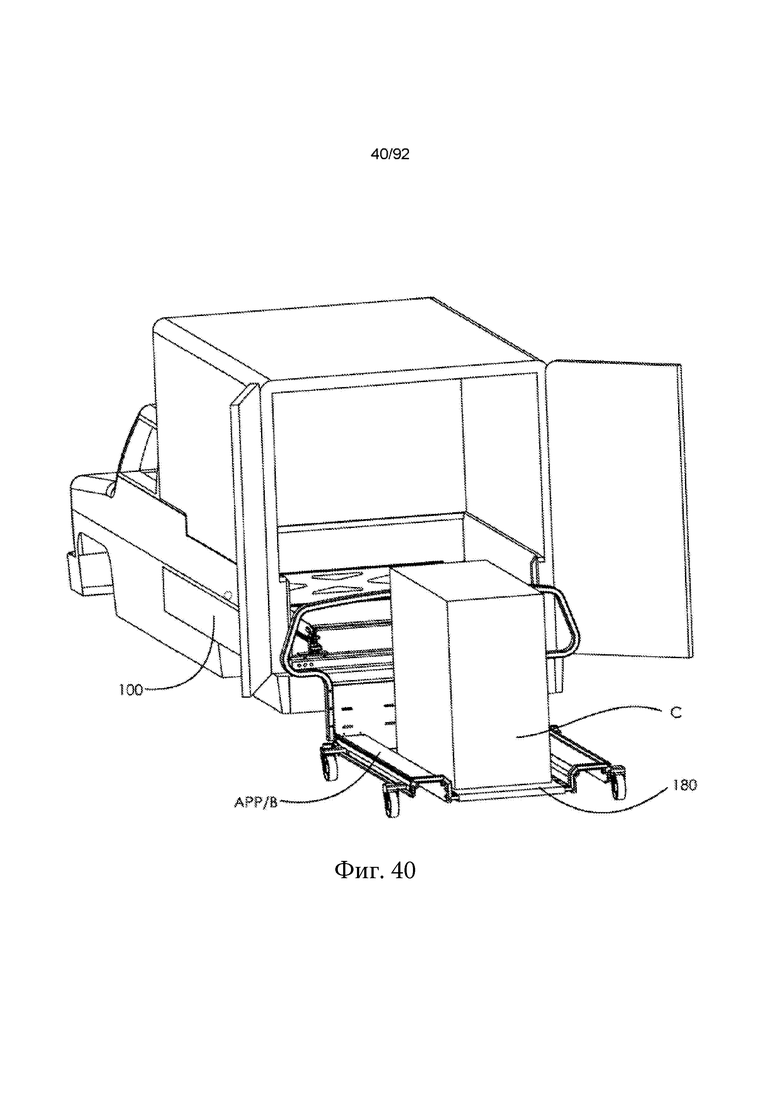
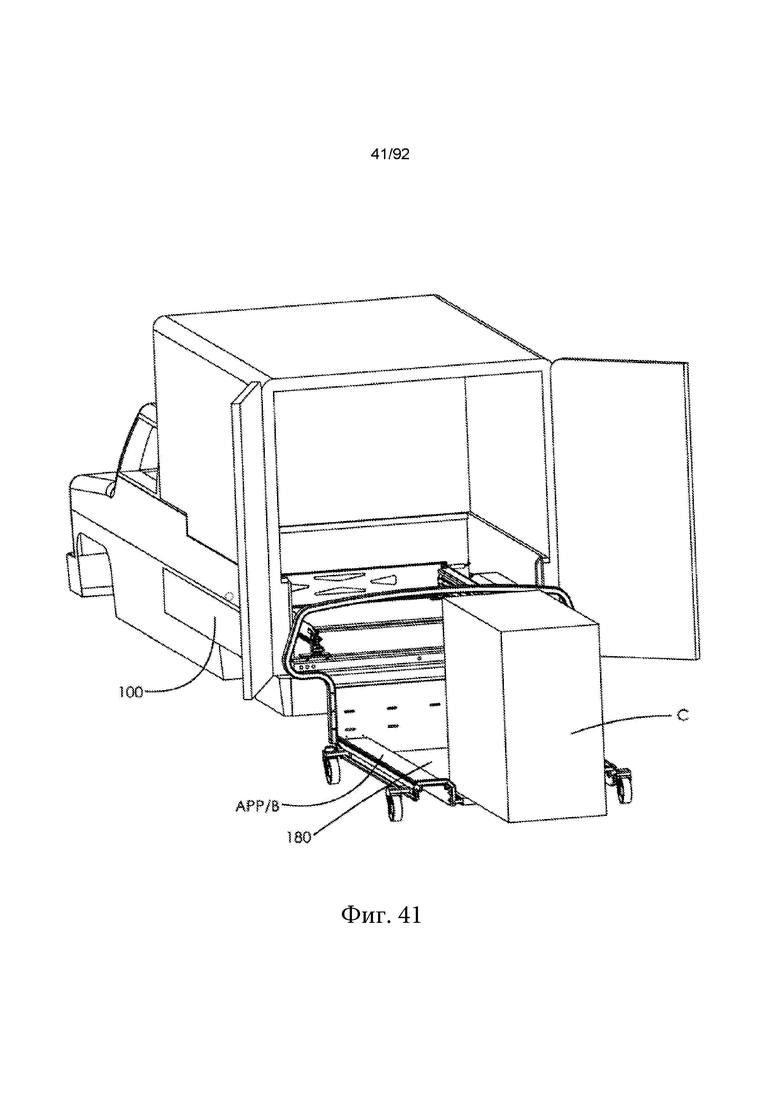
[0009] Фиг. 40-41 иллюстрируют, как груз может быть автоматически доставлен без участия человека.
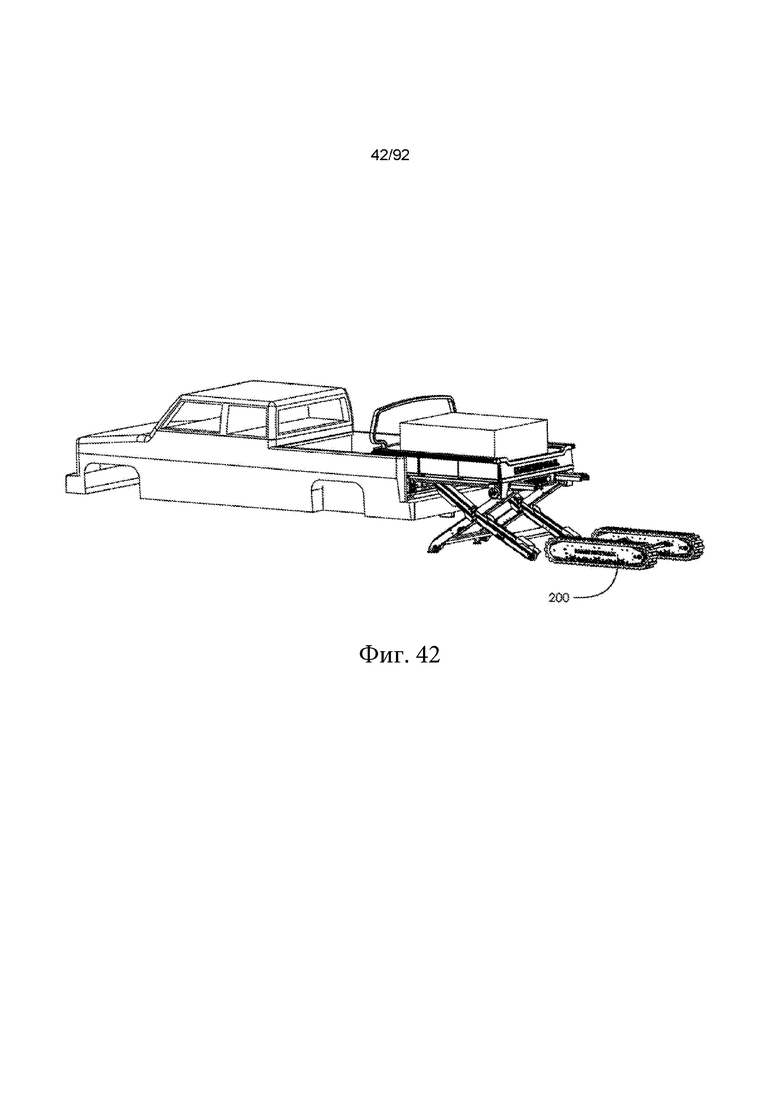
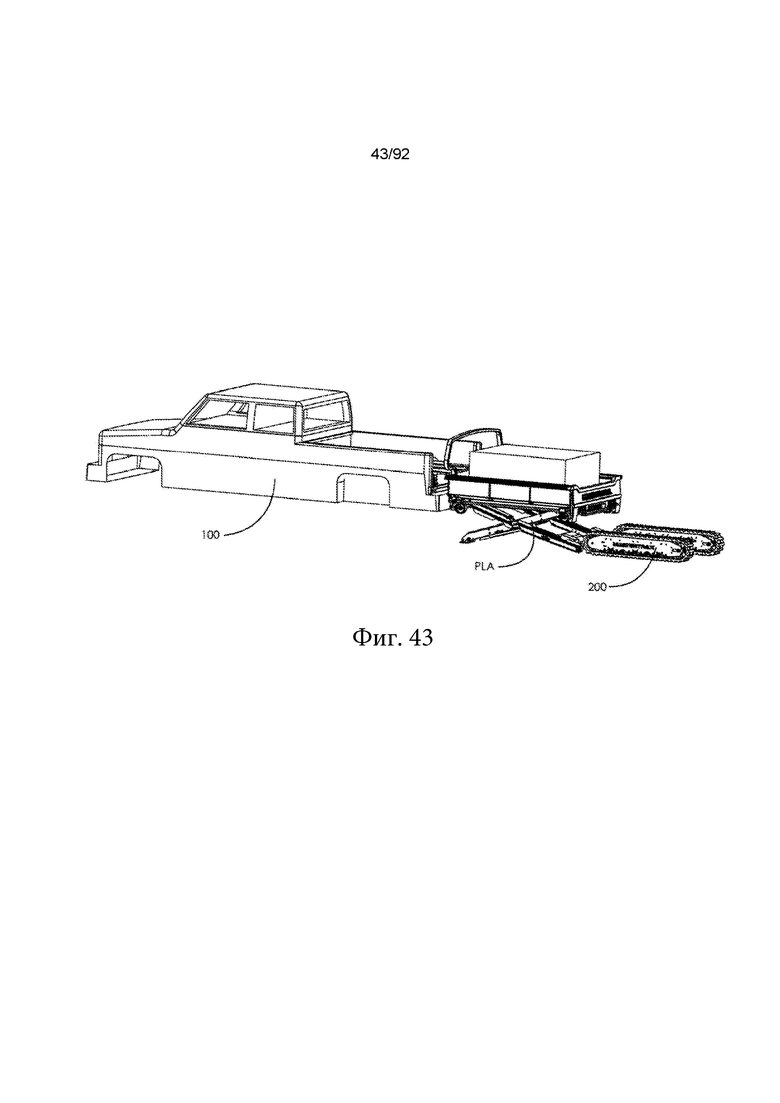
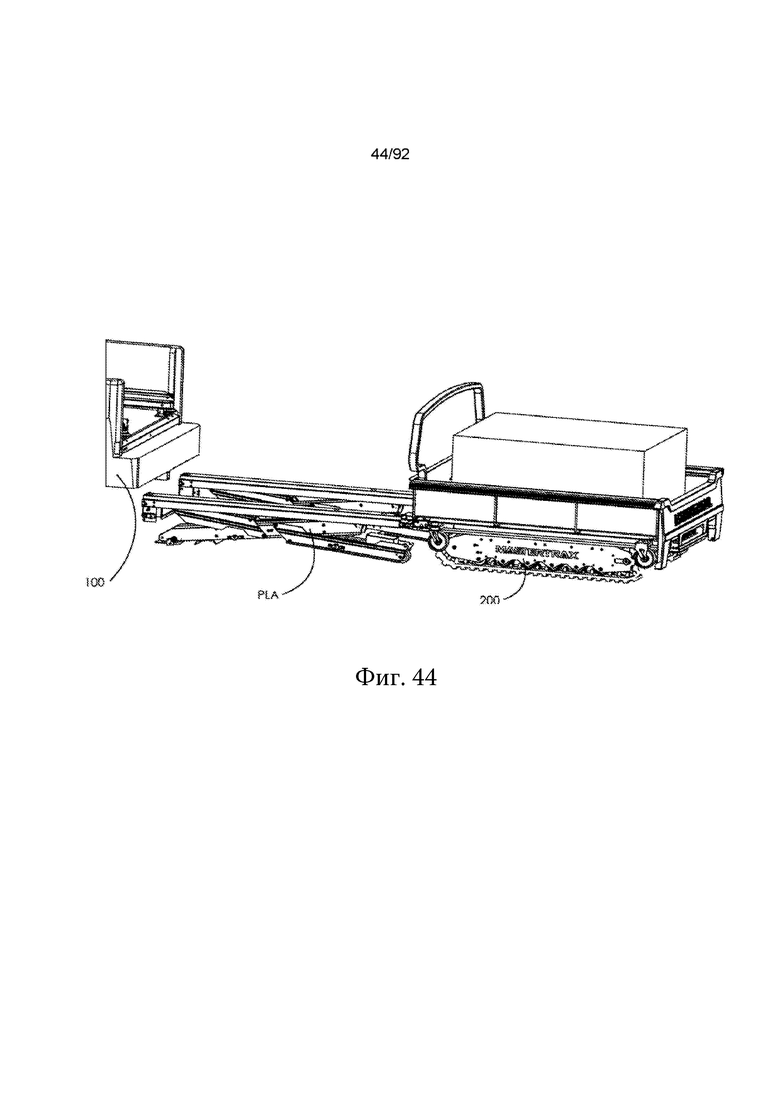
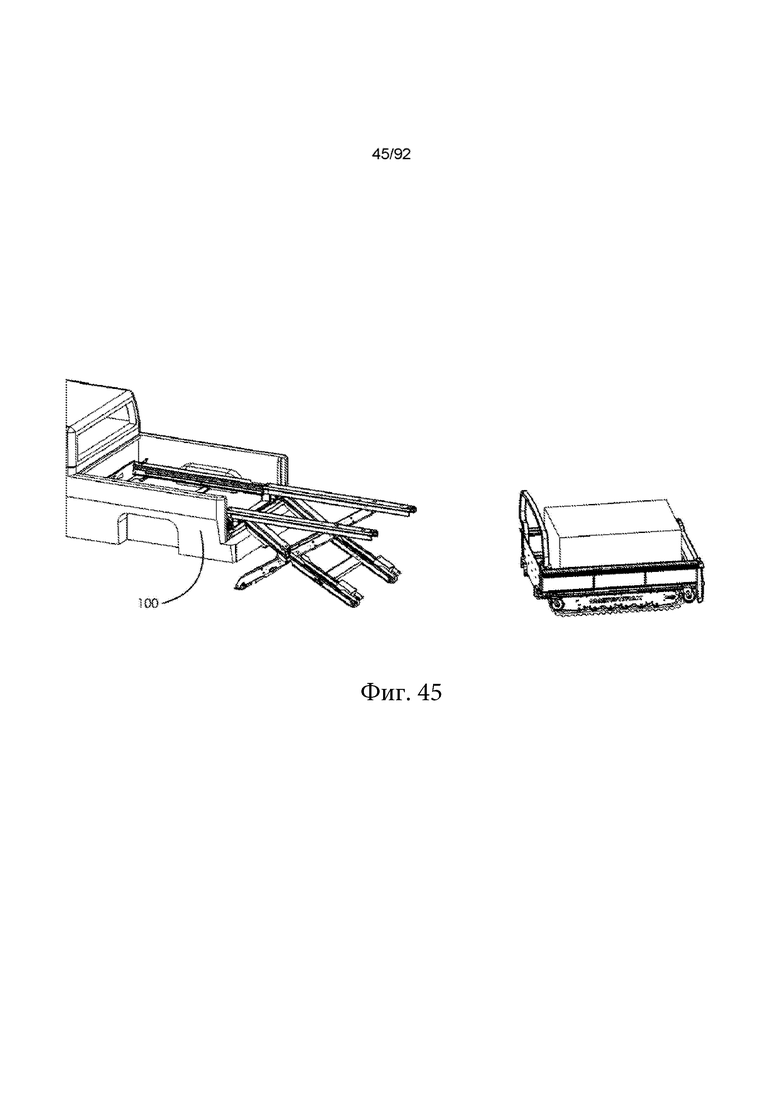
[0010] Фиг. 42-45 иллюстрируют разгрузку груза из кузова грузового автомобиля.
[0011] Фиг. 46-92 представляют собой подробные виды различных конструктивных и функциональных признаков настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
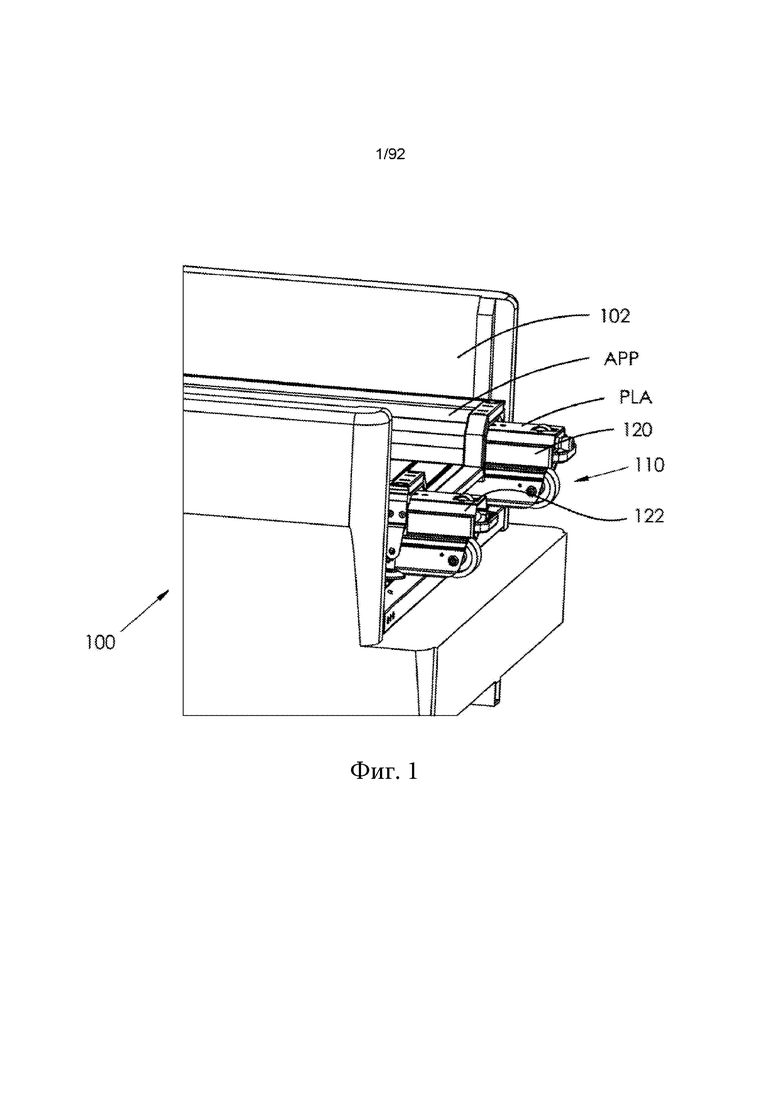
[0012] На Фиг. 1 изображена задняя часть механического транспортного средства, такого как грузовой автомобиль 100 малой грузоподъемности, хотя следует учесть, что транспортное средство также может представлять собой внедорожник, автофургон или транспортное средство другого типа с увеличенным отсеком для хранения грузов и со свободным доступом сзади. Задний борт на Фиг. 1 снят с транспортного средства 100, что обеспечивает доступ к пространству или к кузову 102 грузового автомобиля. Система 110 погрузки / разгрузки установлена в кузове 102 грузового автомобиля и содержит, например, рельсы TR грузового автомобиля, узел PLA погрузчика с механическим приводом (далее, механического погрузчика) и грузовую платформу / (грузовой контейнер в других вариантах выполнения) АРР/В, что будет по отдельности и вместе описано далее более подробно. Фиг. 1 иллюстрирует начальное перемещение узла PLA механического погрузчика назад из вставленного, сложенного положения в кузове 102 грузового автомобиля и, в частности, вставленного в рельсы TR грузового автомобиля и грузовую платформу / грузовой контейнер АРР/В системы 110. Соответствующие регуляторы (не показаны) для работы системы 110 погрузки / разгрузки, в том числе для вытягивания / втягивания узла PLA механического погрузчика из кузова 102 грузового автомобиля могут быть расположены в транспортном средстве 100 рядом с кузовом грузового автомобиля, или же они могут обеспечиваться с помощью дистанционного контроллера, например, проводного или беспроводного контроллера, приложения для планшета/телефона и т.д.
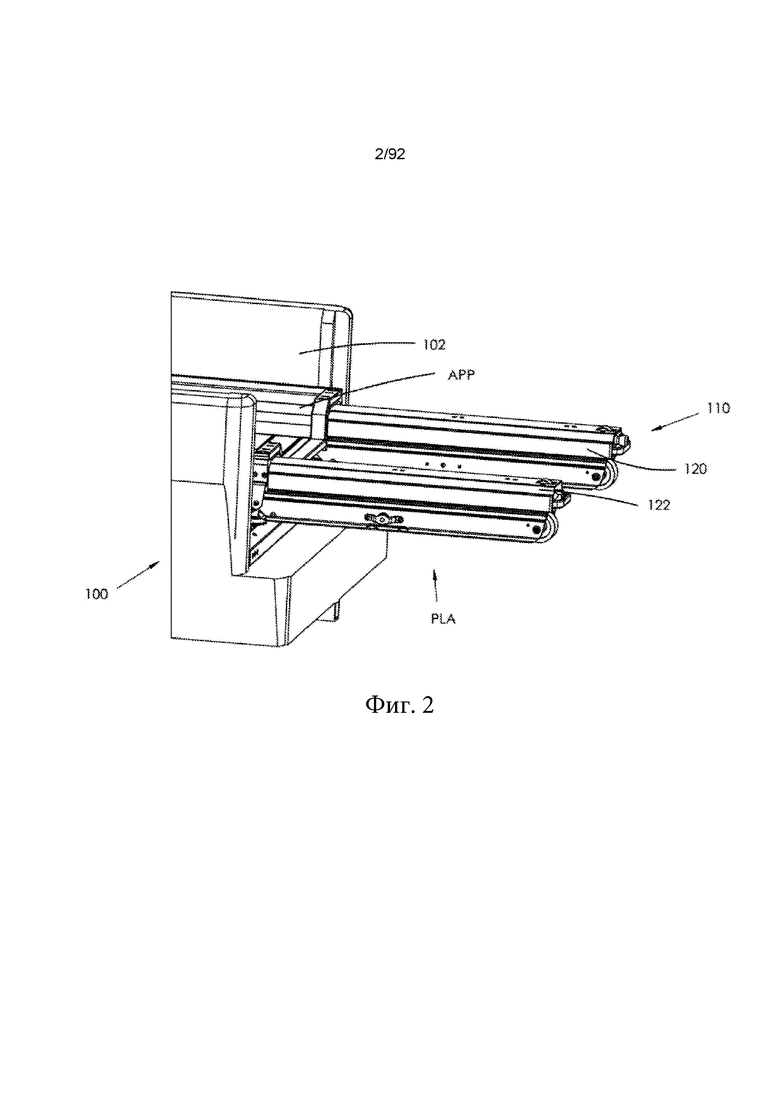
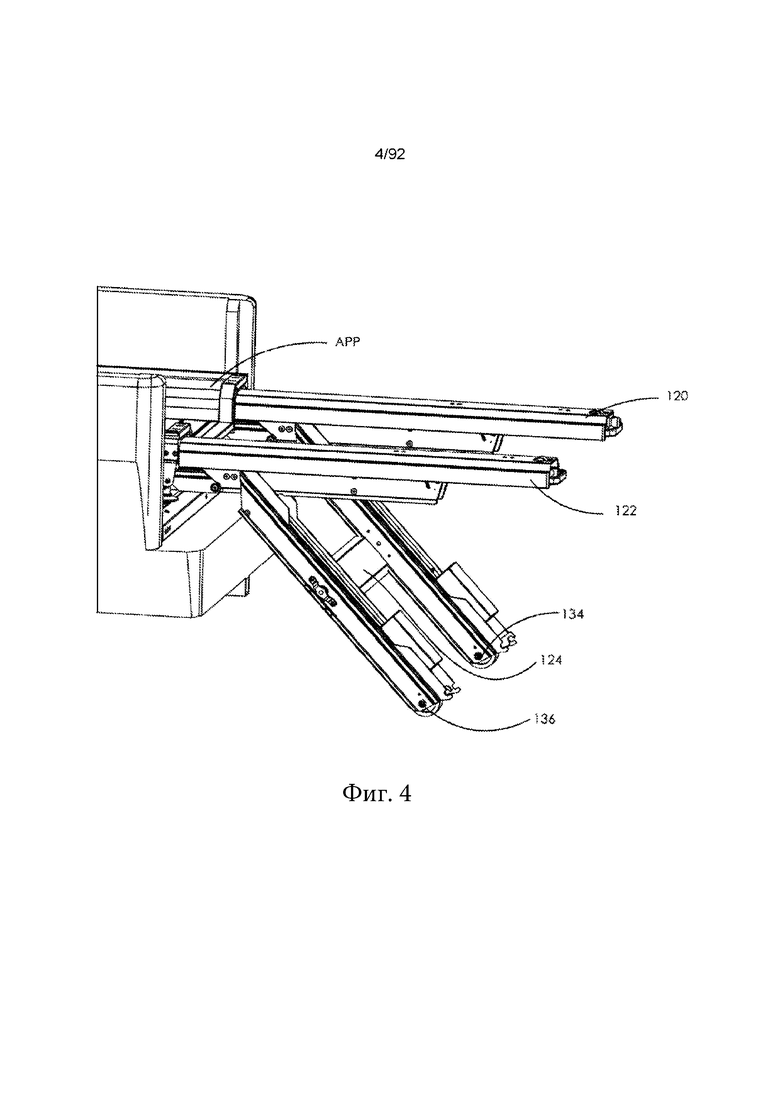
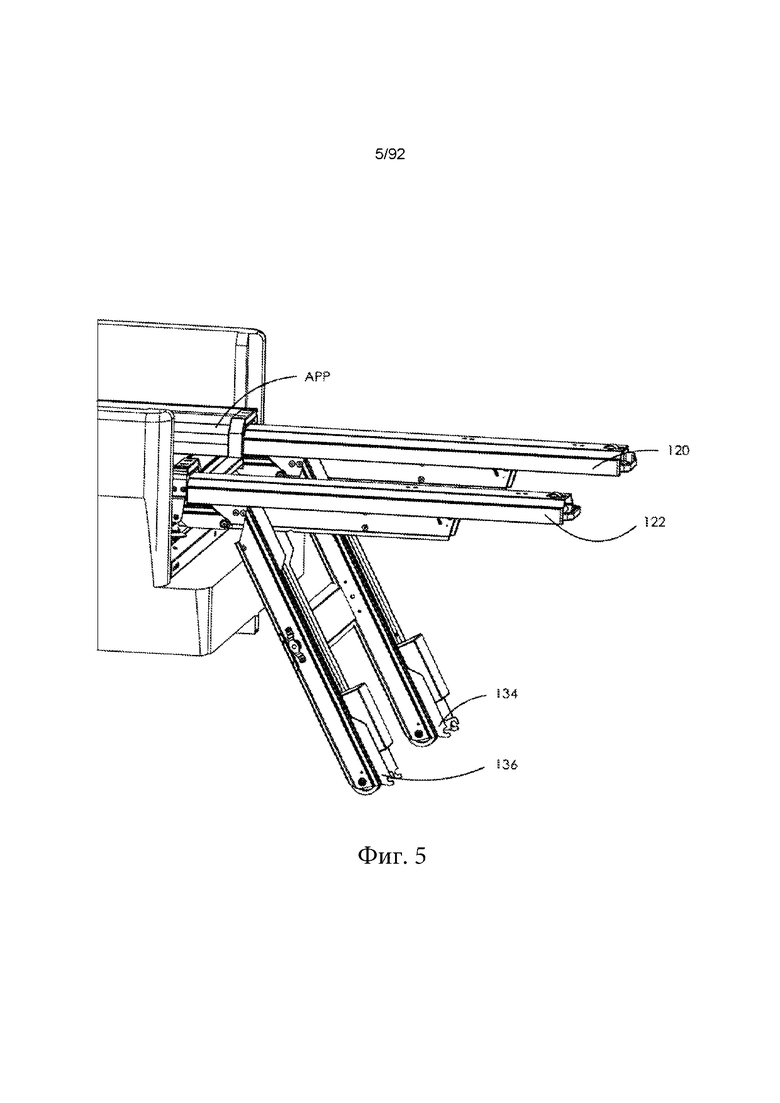
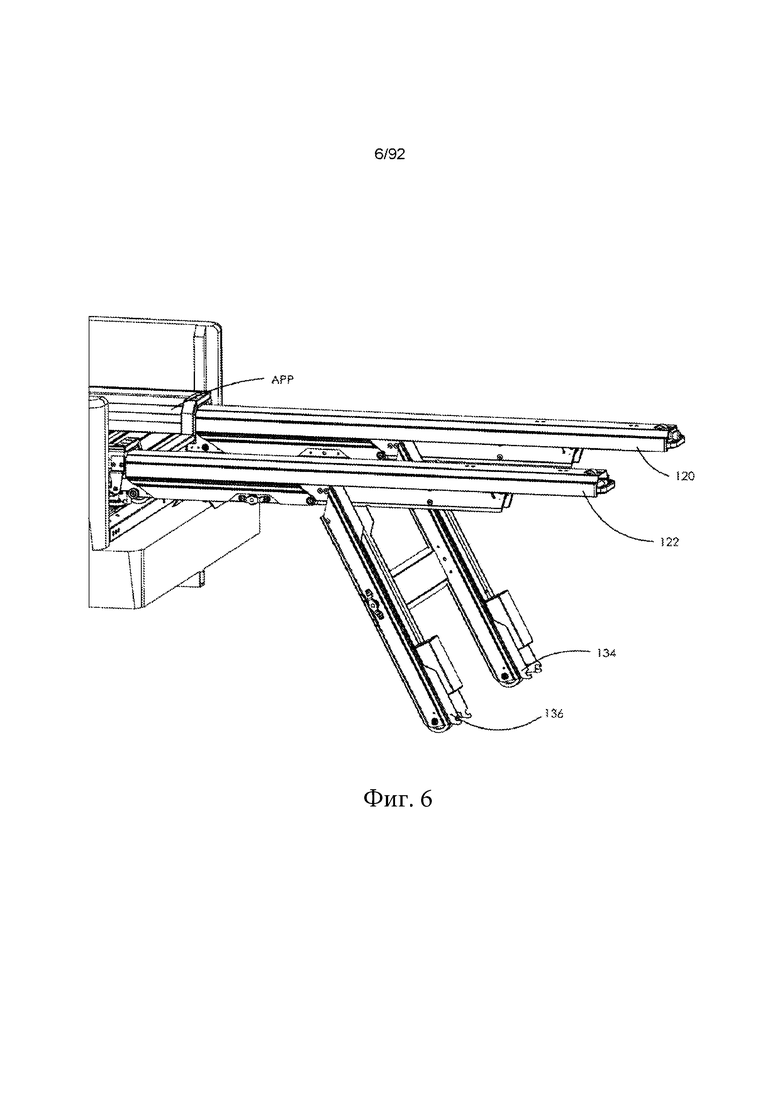
[0013] Также как показано на Фиг. 1 и дополнительно на Фиг. 2-8, узел PLA механического погрузчика содержит первый и второй удлиненные прямолинейные направляющие рельсы 120, 122. Направляющие рельсы 120, 122 отстоят друг от друга в поперечном направлении, расположены параллельно и закреплены в этом положении с помощью соединяющих обе стороны поперечных рельсов 124 (которые фактически соединяют между собой опоры, как станет более очевидным далее) (см. Фиг. 4). Первый направляющий рельс 120 имеет ту же конструкцию, что и второй направляющий рельс 122, так что описание одного из них в полной мере подходит для другого, если не указано иное, причем также каждый поперечный рельс 124 по существу аналогичен другим поперечным рельсам, которые соединяют направляющие рельсы. В предпочтительном варианте выполнения направляющие рельсы 120, 122 представляют собой по существу профили U-образной перевернутой формы, например, экструдированные алюминиевые профили для облегчения веса, прочности, простоты конструкции и функциональности. Конечно, это не исключает использования других конструкций, других материалов или других способов формирования направляющих рельсов 120, 122.
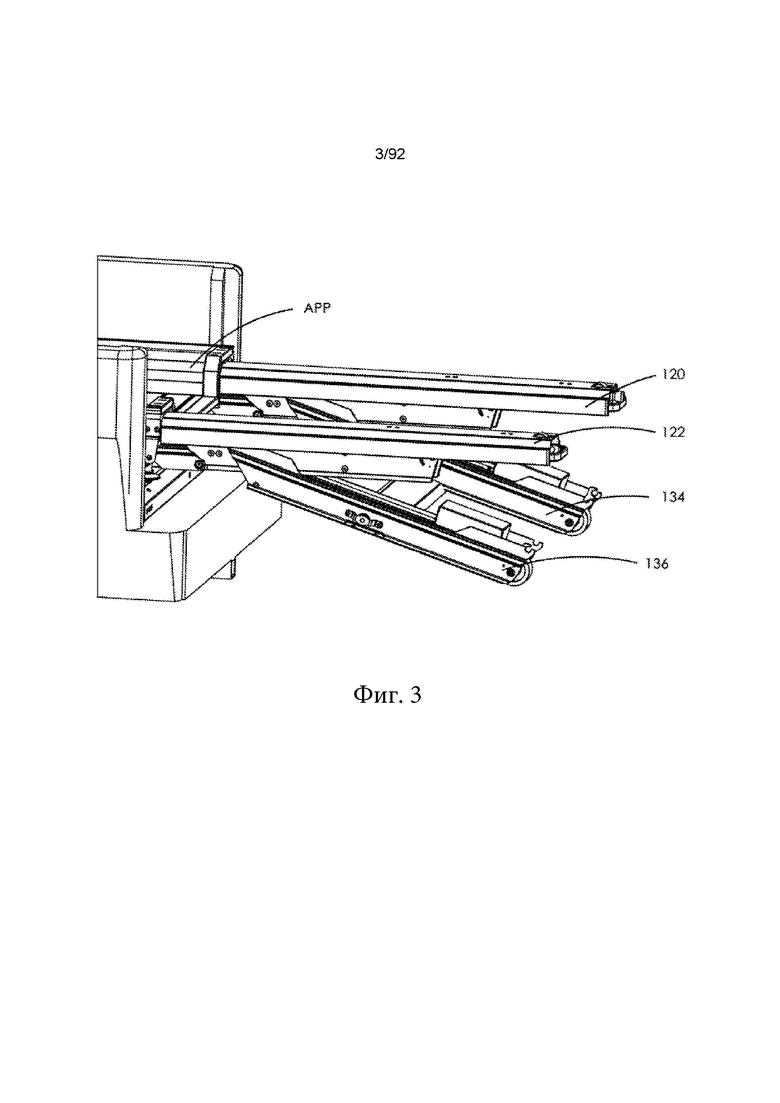
[0014] Из полностью вставленного положения хранения внутри кузова 102 грузового автомобиля узел PLA механического погрузчика может выборочно управляться для погрузки и разгрузки грузовой платформы / грузового контейнера АРР/В, выполненного с возможностью приема или имеющего размеры, обеспечивающие возможность приема груза различных типов. С помощью движущей силы узел PL А механического погрузчика перемещается назад относительно оставшейся части системы 110 погрузки / разгрузки. Как показано на Фиг. 1 и 2, направляющие рельсы 120, 122 и связанные с ними опорные узлы 130, 132 узла механического погрузчика перемещаются назад из кузова 102 грузового автомобиля. Сначала опорные узлы 130, 132 находятся в сложенном положении и, таким образом, направляющие рельсы 120, 122 и опорные узлы расположены прямолинейно и параллельно (Фиг. 2). На Фиг. 3 перемещение узла PLA механического погрузчика временно приостановлено / прекращено, в то время как первые или задние опоры 134, 136 и, в особенности, задние концы полуопор 134а, 136а, которые соединены между собой первым поперечным рельсом 124а, поворачиваются вниз от направляющих рельсов 120, 122 (следует отметить постепенный поворот или вращение, показанное на Фиг. 3-5). На концевых частях 134а, 136а полуопор расположены ролики или колеса 138, которые обеспечивают возможность качения опорных узлов 130, 132 по поверхности земли. Таким образом, после того, как полуопоры 134а, 136а полностью повернулись и ролики 138 оказались во взаимодействии с поверхностью земли, узел PLA механического погрузчика перемещается дальше назад из кузова 102 грузового автомобиля (сравните Фиг. 5 и Фиг. 6).
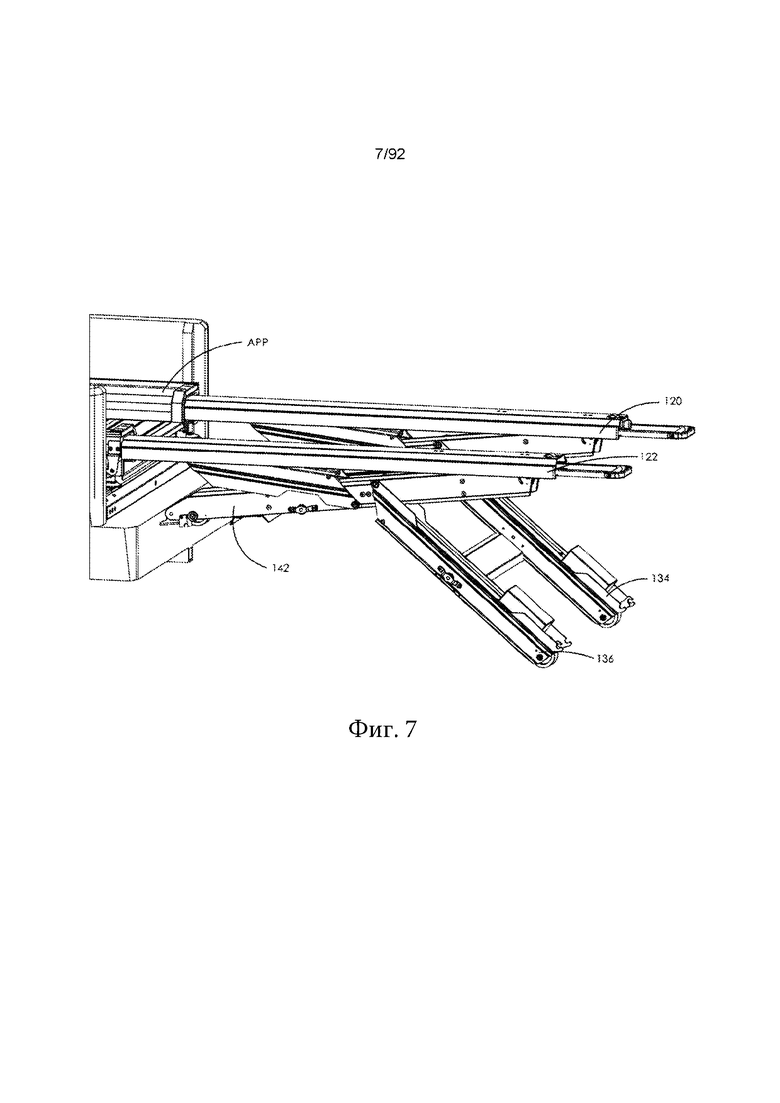
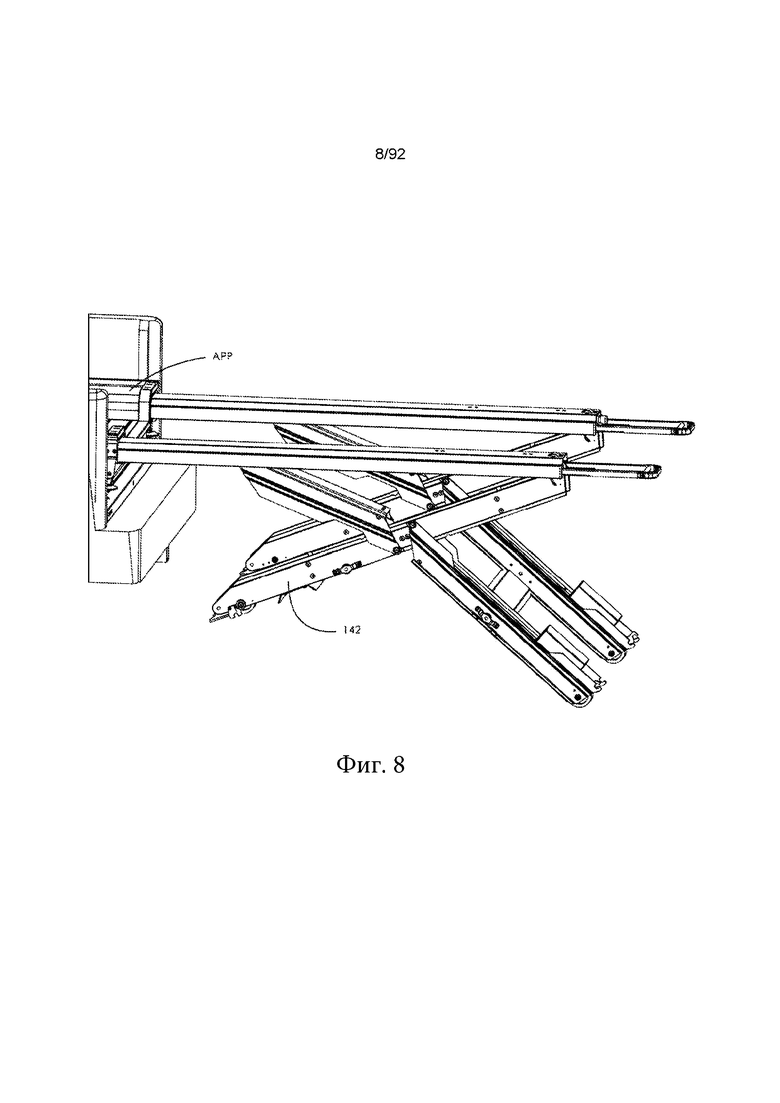
[0015] На данном этапе в процессе разгрузки вторые или передние опоры 140, 142 начинают разворачиваться из положения, параллельного направляющим рельсами 120, 122, для взаимодействия с поверхностью земли. Сравнивая Фиг. 7 и Фиг. 8, очевидно, что направляющие рельсы 120, 122 и первые концы передних опор 140, 142, которые остаются соединенными с направляющими рельсами, перемещаются на некоторое расстояние относительно друг друга, когда противоположный, контактирующий с поверхностью земли конец передних опор перемещается к поверхности земли. На конце передних опор 140, 142, контактирующем с землей, имеются опорные башмаки 150. Опорные башмаки 150 находятся на поверхности земли, когда узел PLA механического погрузчика поднимается. Это препятствует качению узла PLA механического погрузчика при разгрузке и погрузке груза. Когда узел PLA механического погрузчика поднимается на небольшое расстояние от земли, ролики/колеса 152, расположенные рядом с опорными башмаками 150 или за ними, входят в контакт с поверхностью земли, обеспечивая качение узла механического погрузчика вперед и назад по поверхности земли.
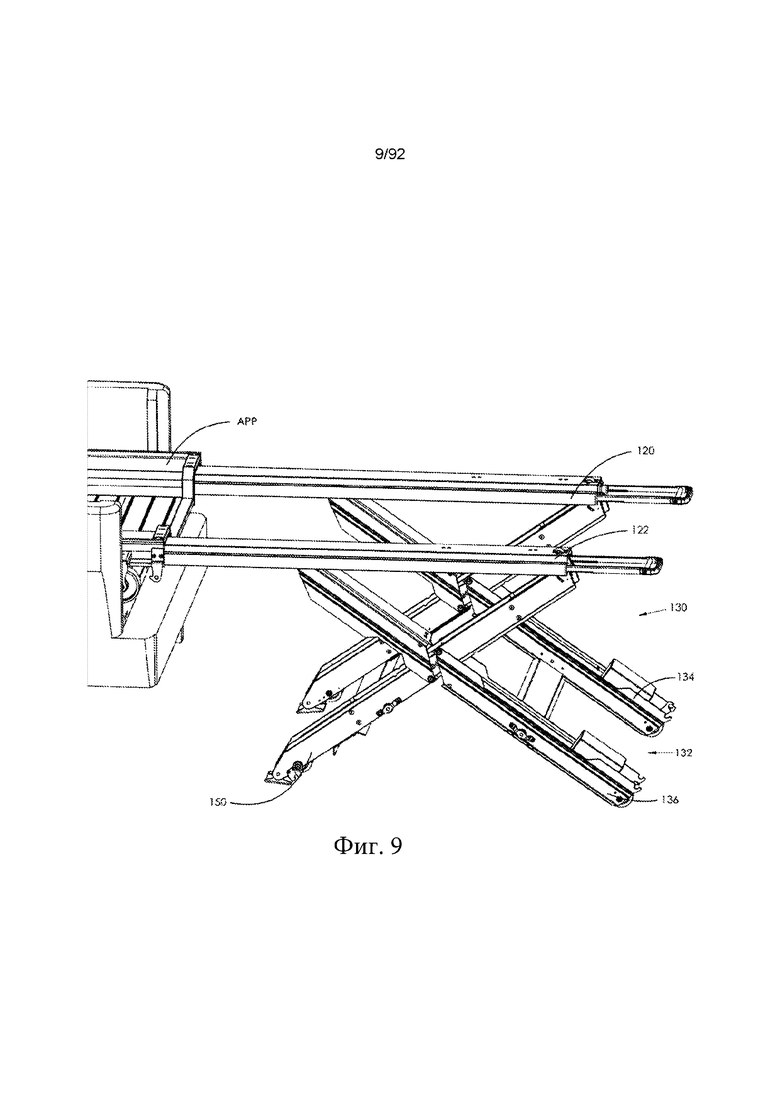
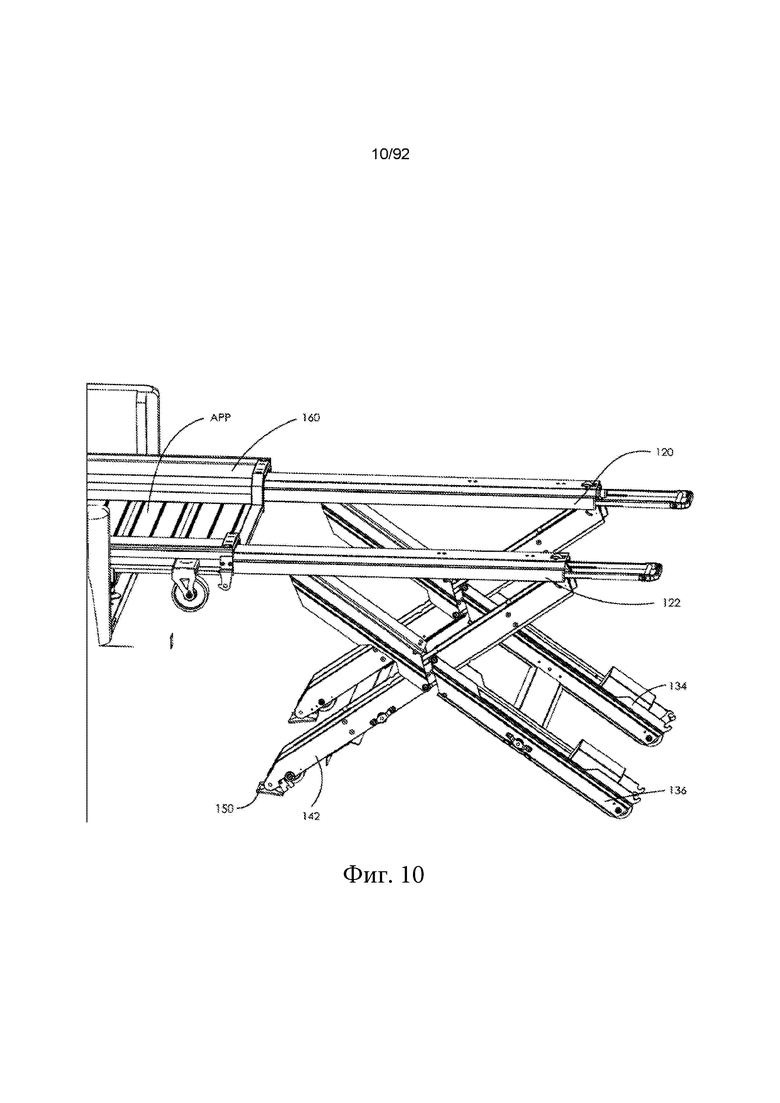
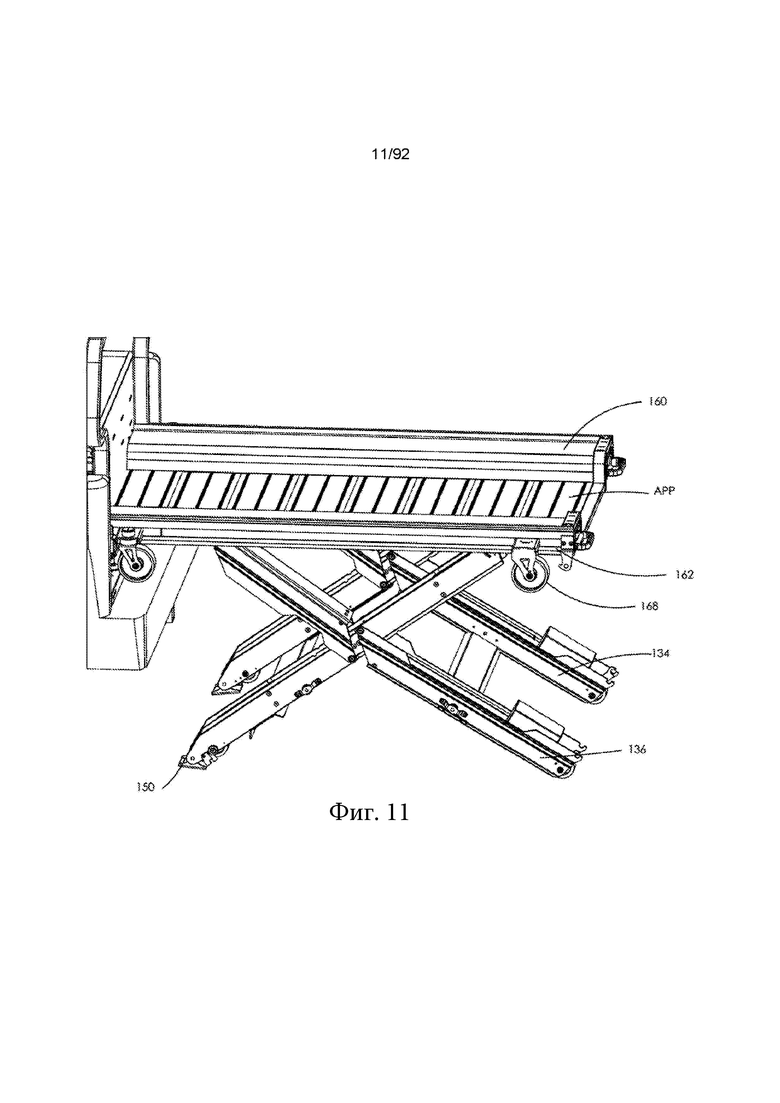
[0016] В частности, Фиг. 9-11 иллюстрируют перемещение грузовой платформы / грузового контейнера АРР/В из кузова 102 грузового автомобиля по первому и второму направляющим рельсам 120, 122 узла PLA механического погрузчика. Фиг. 9 и Фиг. 10 иллюстрируют перемещение грузовой платформы / грузового контейнера АРР/В назад по направляющим рельсам 120, 122, при этом рельсы 160, 162 грузовой платформы / грузового контейнера выполнены с возможностью скользящего перемещения по направляющим рельсам. Рельсы 160, 162 грузовой платформы / грузового контейнера предпочтительно представляют собой экструдированные профили U-образной перевернутой формы, имеющие размеры, обеспечивающие возможность приема направляющих рельсов 120, 122. Вдоль рельсов 160, 162 установлены направляющие ролики для обеспечения скользящего приема рельсов грузовой платформы / грузового контейнера относительно направляющих рельсов 120, 122. Между рельсами 160, 162 проходит(ят) панель(и) 164 пола, которая(ые) установлена(ы) вдоль противоположных боковых кромок в канавках, выполненных на обращенных друг к другу поверхностях рельсов грузовой платформы / грузового контейнера. При этом создается цельно-алюминиевый узел платформы / контейнера АРР/В без сварных швов и креплений. Кроме того, на внешних боковых сторонах рельсов 160, 162 грузовой платформы / грузового контейнера могут быть выполнены канавки 166, предназначенные для приема боковых опор контейнера или для установки крепежных кронштейнов, которые описаны ниже. В канавках 166 также размещаются ролики 168, которые скользят по рельсам 160, 162. Таким образом, когда грузовая платформа / грузовой контейнер АРР/В вкатывается в грузовой автомобиль и выкатывается из него по рельсам TR грузового автомобиля, ролики 168 могут перемещаться на ограниченное расстояние относительно рельсов 160, 162 таким образом, чтобы не препятствовать перемещению грузовой платформы / грузового контейнера АРР/В в случае зацепления роликов за колесные ниши грузового автомобиля, которые выступают в кузов 102 грузового автомобиля. В результате грузовая платформа / грузовой контейнер АРР/В полностью перемещается из кузова грузового автомобиля на направляющие рельсы 120, 122 узла PLA (Фиг. 11).
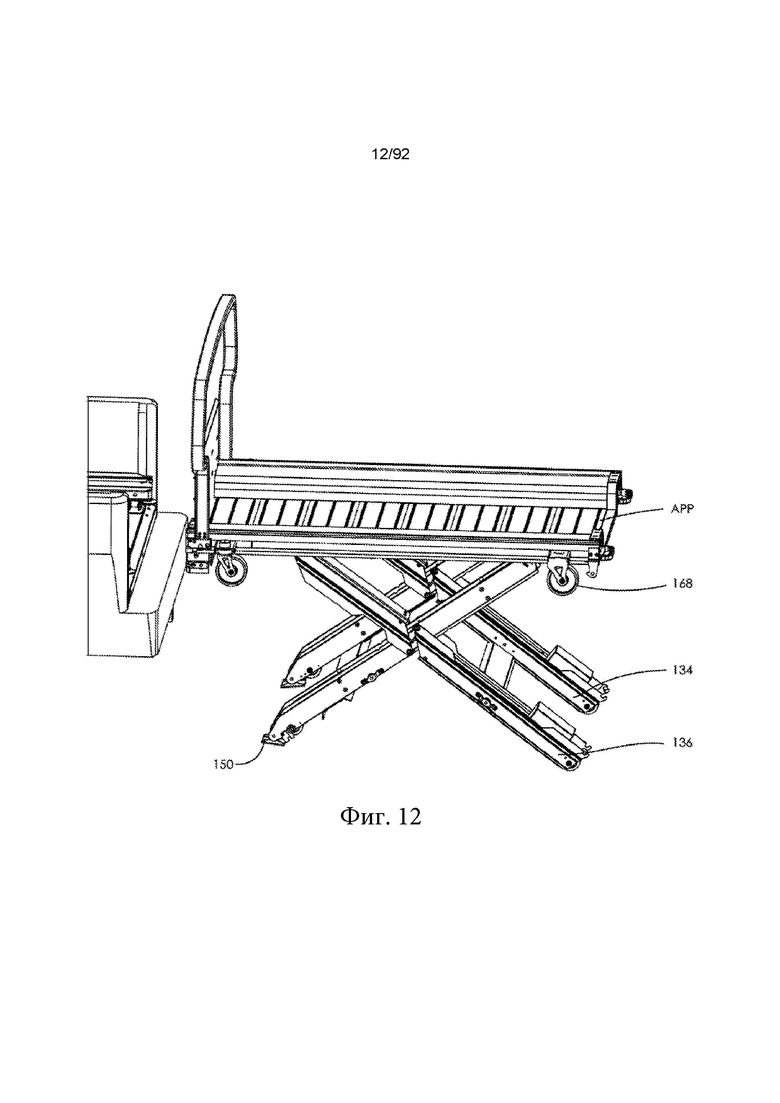
[0017] Когда узел PLA поднимает или опускает свои передние опоры 140, 142, направляющие рельсы 120, 122 остаются зафиксированными с рельсами TR грузового автомобиля. Таким образом, чтобы передние опоры 140, 142 не задевали бампер транспортного средства 100, узел PLA механического погрузчика должен переместиться назад на небольшое расстояние (Фиг. 12). Для выполнения этого действия в направляющем рельсе установлен выдвижной механизм, который соединен с задней опорой, чтобы дать возможность механическому погрузчику перемещаться назад и обеспечивать зазор между передними опорами 140, 142 и бампером грузового автомобиля. Этот выдвижной механизм может иметь двигатель и ходовой винт, установленный в нем для автоматического перемещения передних опор 140, 142 назад и вперед. Предпочтительно, выдвижной механизм имеет две оси, причем передняя ось взаимодействует с верхним фиксатором внутренней задней опоры при нормальном подъеме, а задняя ось взаимодействует с фиксатором на конце задних наружных опор для вываливания груза. Эти фиксаторы описаны ниже.
[0018] Когда грузовая платформа / грузовой контейнер АРР/В закреплен на направляющих рельсах 120, 122 (Фиг. 13), опорные узлы 130, 132 складываются (Фиг. 14) для того, чтобы опустить грузовую платформу / грузовой контейнер на поверхность земли. Полностью опущенные ролики 168 грузовой платформы / грузового контейнера АРР/В контактируют с поверхностью земли, поскольку фиксатор 170 на каждом ролике удерживает ролики от скольжения в канавках 166 соответствующих рельсов 160, 162 при перемещении грузовой платформы / грузового контейнера по поверхности земли (Фиг. 15 и Фиг. 16). Аналогично, когда грузовая платформа / грузовой контейнер АРР/В вкатывается на рельсы TR грузового автомобиля, этот фиксатор 170 перемещается или поднимается вверх рельсами грузового автомобиля, отсоединяя ролики от грузовой платформы / грузового контейнера и, тем самым, обеспечивая возможность скольжения роликов 168 внутри канавок грузовой платформы 166.
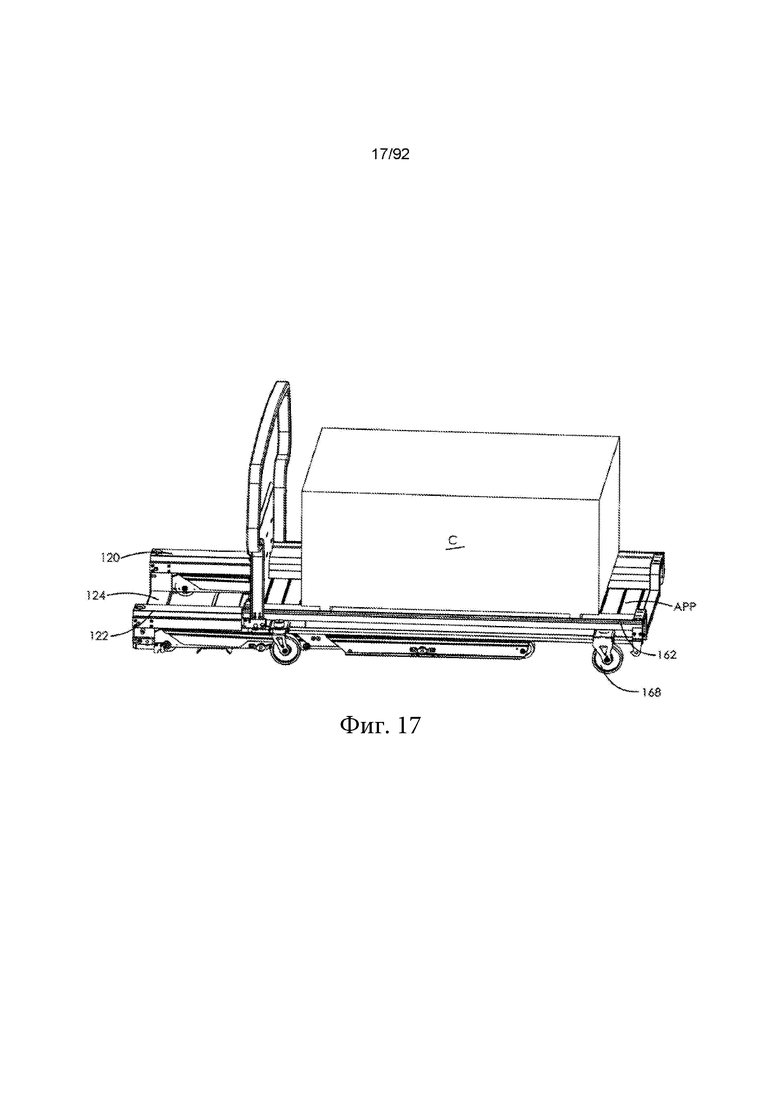
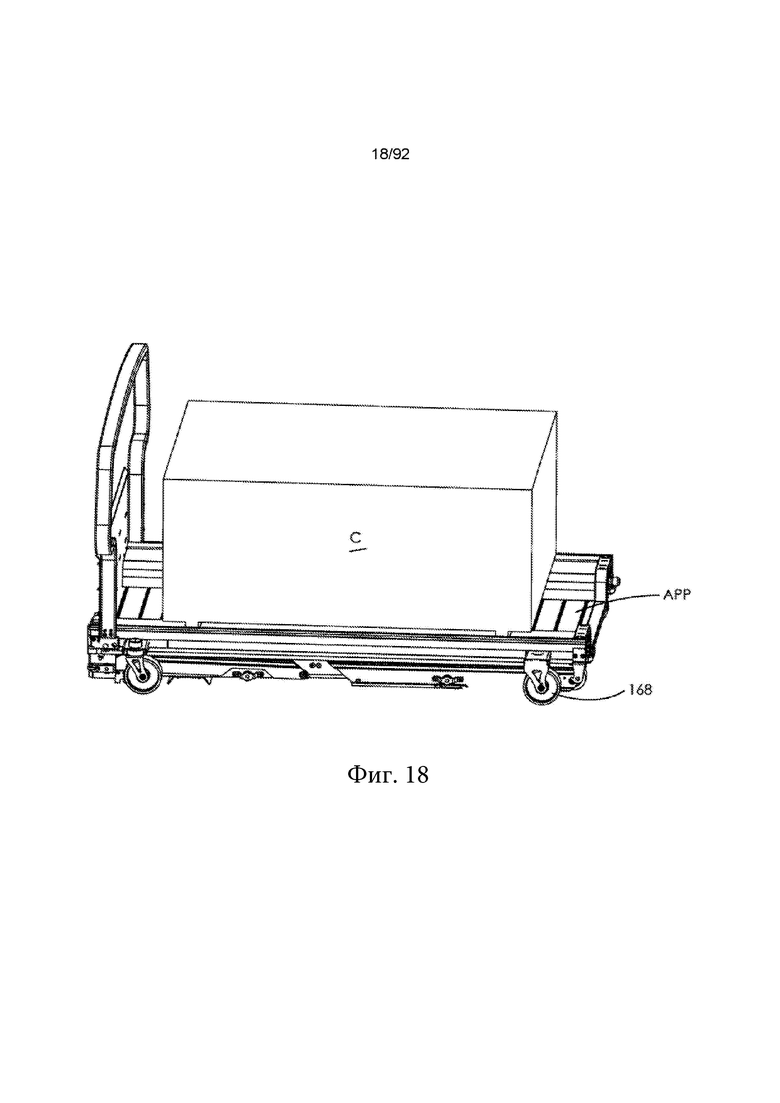
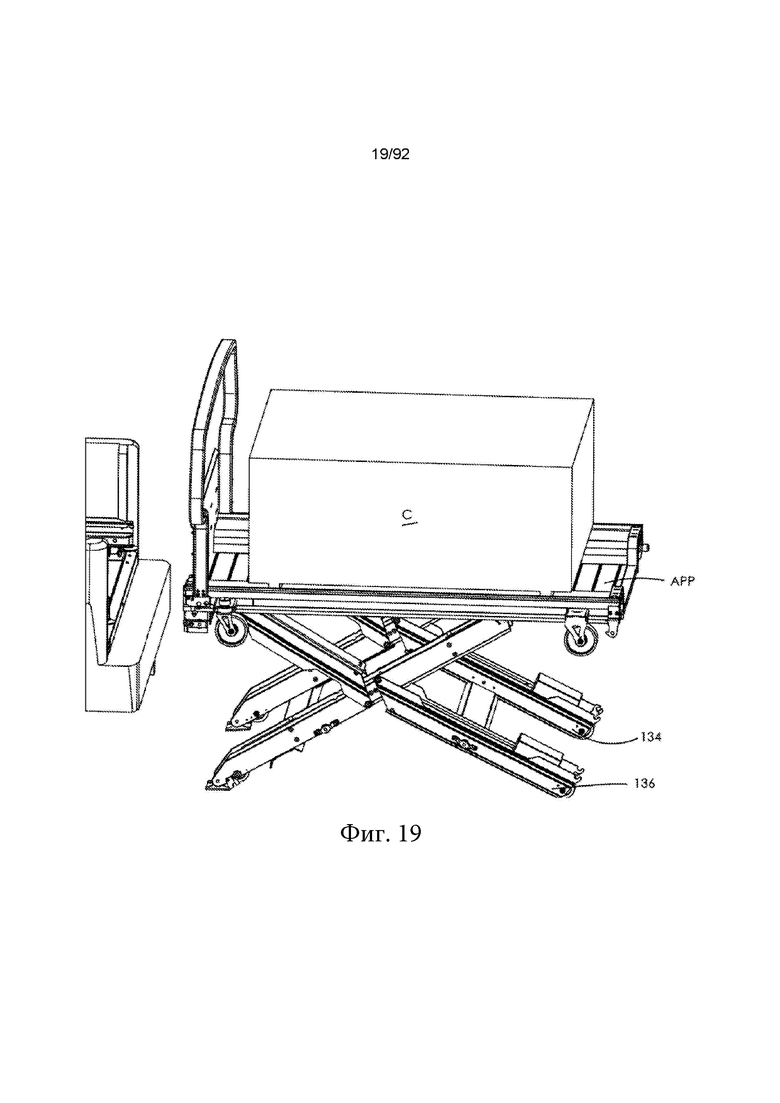
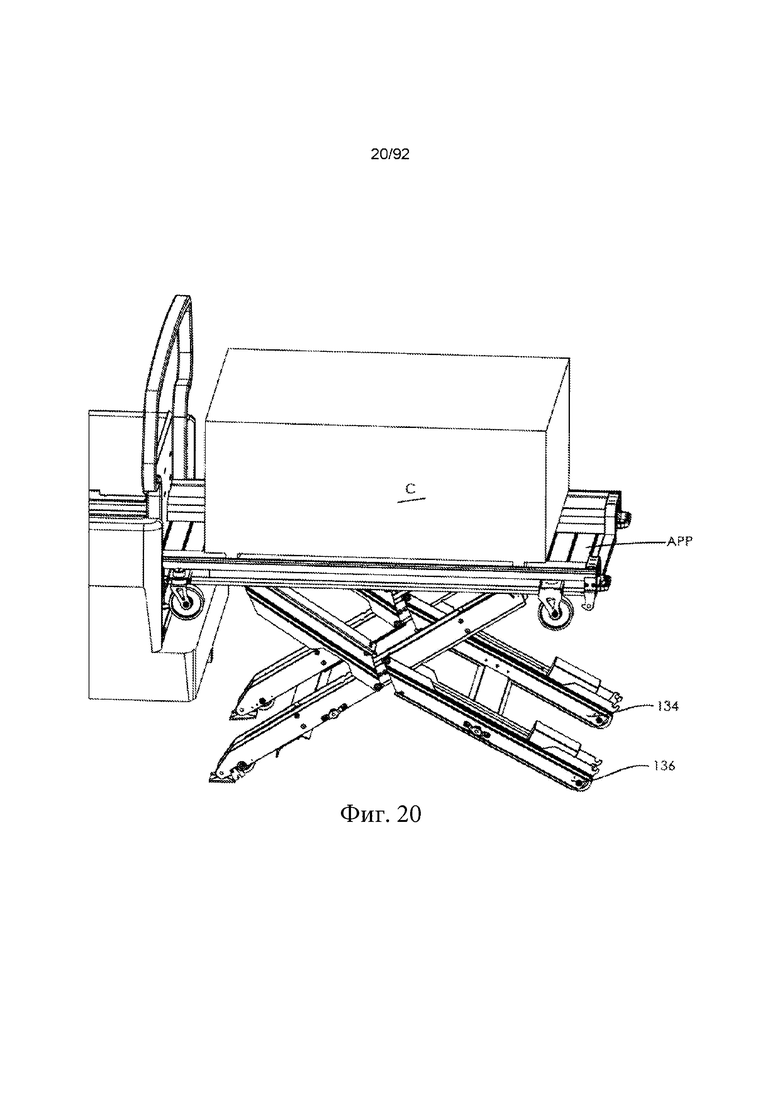
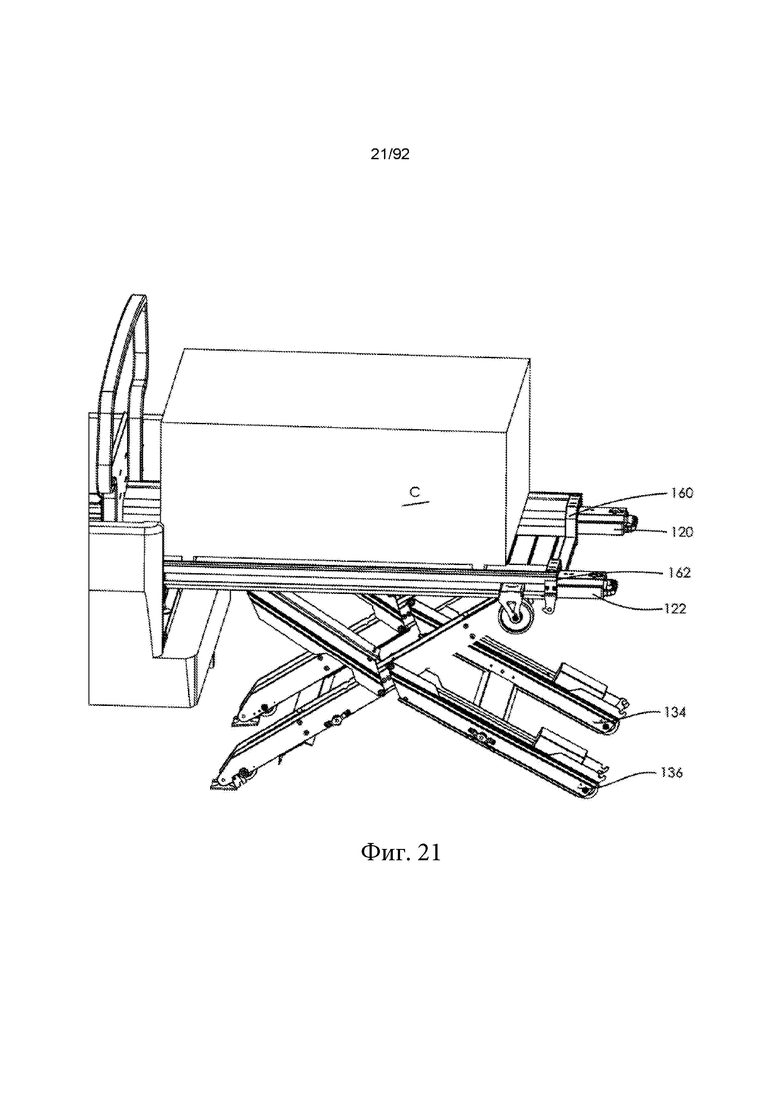
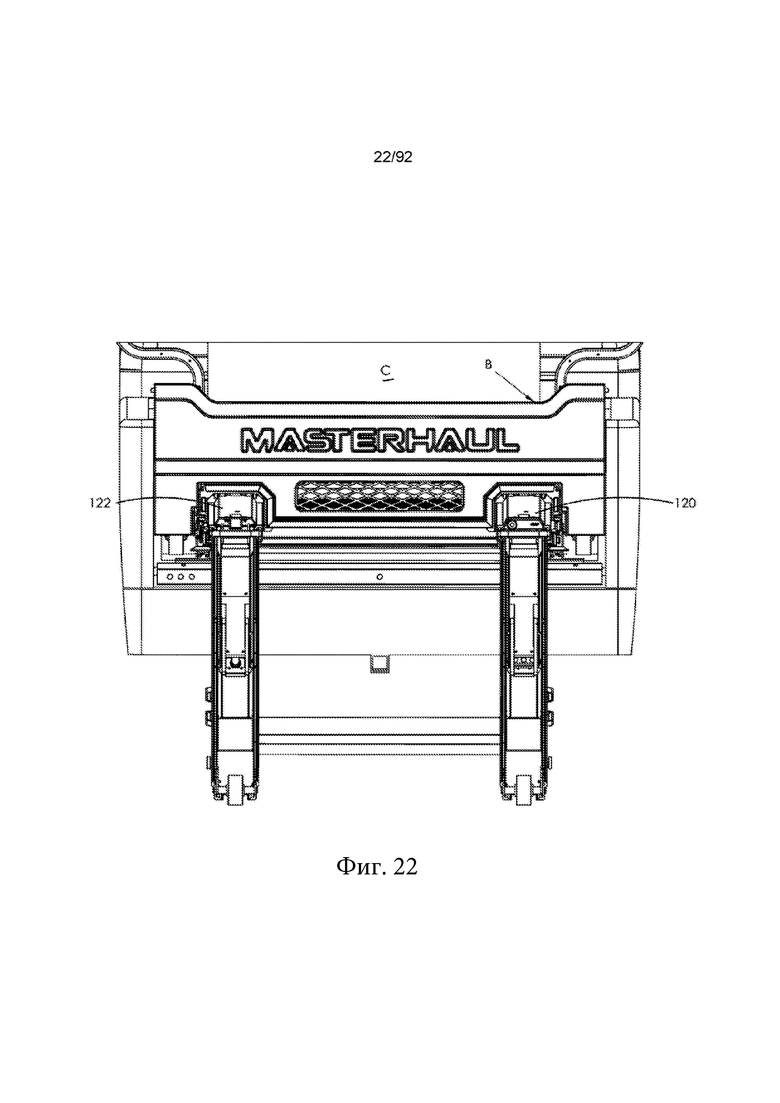
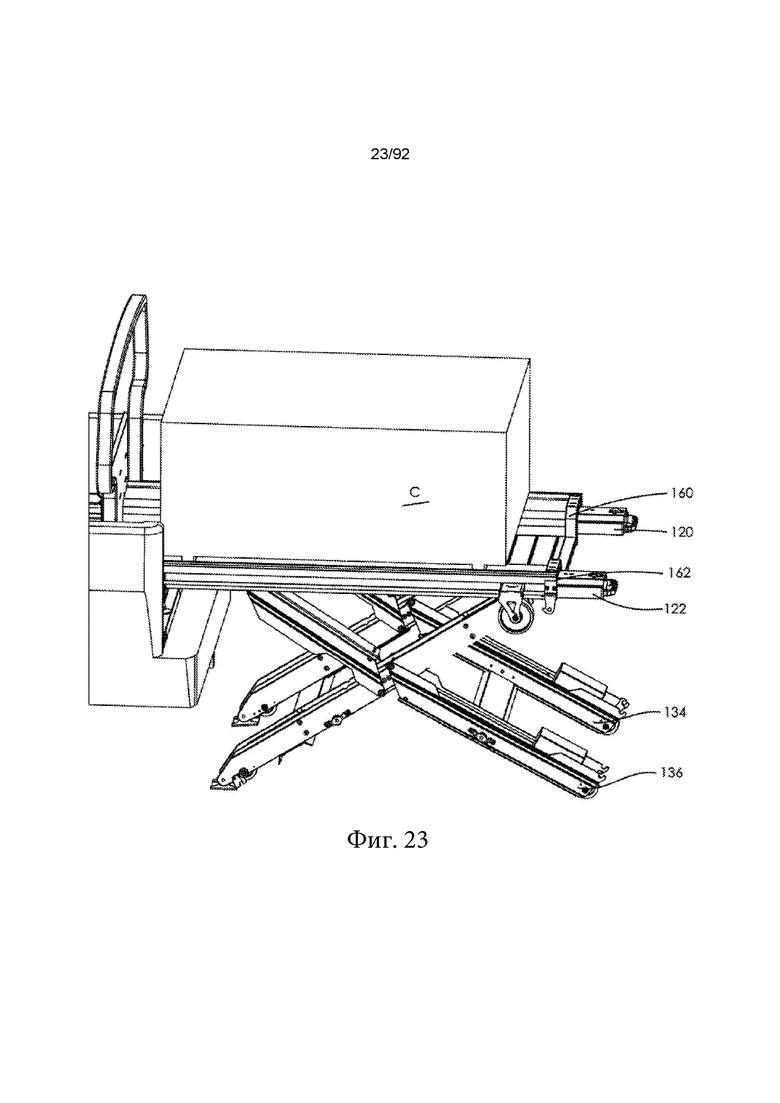
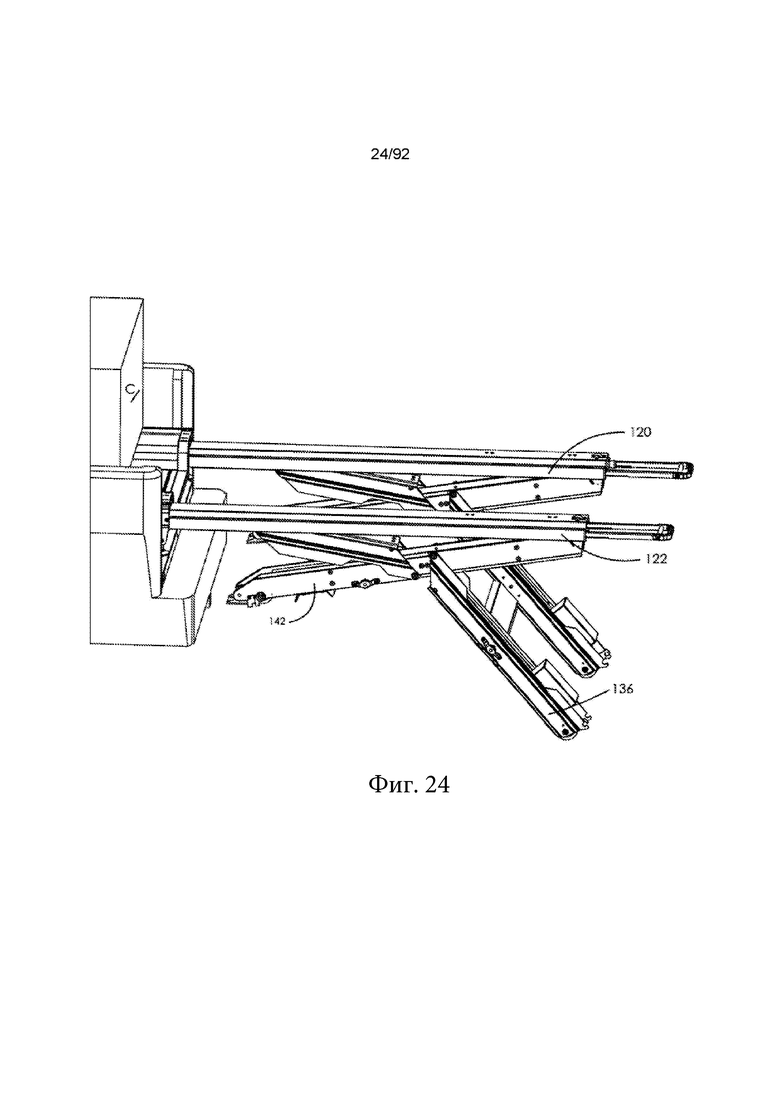
[0019] Фиг. 17, на которой показан груз С, помещенный на грузовую платформу / грузовой контейнер АРР/В, иллюстрирует закатывание грузовой платформы / грузового контейнера на узел PLA механического погрузчика. После закрепления на узле PLA механического погрузчика с помощью фиксаторов 170, связанных с каждым из роликов 168 (Фиг. 18), опорные узлы 130, 132 поднимают панель пола и груз С (Фиг. 19), при этом грузовая платформа / грузовой контейнер с грузом загружается в кузов грузового автомобиля (Фиг. 20 и Фиг. 21) до тех пор, пока грузовая платформа / грузовой контейнер полностью не войдет в кузов грузового автомобиля (Фиг. 22 и Фиг. 23). Фиг. 23 изображает вид сверху задней поверхности 172 контейнера С (а не грузовой платформы, показанной на других чертежах). Затем узел PLA механического погрузчика загружается в кузов 102 способом, проиллюстрированным на чертежах с Фиг. 24 по Фиг. 30, и является процессом, обратным процессу, изображенному на чертежах с Фиг. 1 по Фиг. 8.
[0020] Фиг. 31 и Фиг. 32 иллюстрируют работу в режиме поворота или вываливания груза узла PLA механического погрузчика относительно кузова грузового автомобиля. Следует учесть, что даже если задний борт грузового автомобиля 100 снят, в режиме вываливания груза грузовая платформа / грузовой контейнер АРР/В должен переместиться на некоторое расстояние назад таким образом, чтобы задняя концевая кромка грузовой платформы / грузового контейнера не задевала задний бампер грузового автомобиля.
[0021] Чертежи с Фиг. 33 по Фиг. 39 иллюстрируют разгрузку контейнера В из кузова 102 грузового автомобиля на рабочем участке и прием другого грузового контейнера АРР, заполненного грузом С, погруженным в кузов грузового автомобиля. В частности, отсоединение первого контейнера В от узла PLA механического погрузчика завершается (Фиг. 34), вторая грузовая платформа или грузовой контейнер АРР перемещается на узел PLA механического погрузчика (Фиг. 35), узел механического погрузчика поднимает вторую грузовую платформу или грузовой контейнер до высоты кузова 102 грузового автомобиля (Фиг. 36), второй контейнер перемещается в кузов грузового автомобиля (Фиг. 37), при этом узел механического погрузчика загружается в кузов грузового автомобиля так, что грузовой автомобиль 100 может отъехать от рабочего участка (Фиг. 38). На Фиг. 39 показано, что груз С на второй грузовой платформе или грузовом контейнере АРР затем вываливается из кузова 102 грузового автомобиля на втором рабочем участке.
[0022] Фиг. 40 и Фиг. 41 иллюстрируют возможное использование свойств настоящего изобретения применительно к машине для доставки грузов, грузовому автофургону или прицепу трактора / тягача 100 с прицепом, в частности такого транспортного средства 100, которое является автономным или самоуправляемым. В данном случае грузовая платформа / грузовой контейнер АРР/В модифицирован таким образом, что панели пола, изображенные на предыдущих чертежах, расположены под приводной транспортерной лентой 180. Таким образом, груз С предварительно загружается на грузовую платформу / грузовой контейнер АРР/В системы 110 погрузки / разгрузки, например, на складе (не показан), а транспортное средство 100 завершает доставку на рабочий участок, в коммерческое учреждение, жилой район и т.п. Двери 104 транспортного средства 100 могут открываться автоматически, как часть автономного транспортного средства, а затем узел PLA механического погрузчика может извлекать грузовую платформу / грузовой контейнер АРР/В из пространства 102 транспортного средства, располагать грузовую платформу / грузовой контейнер в заданном месте рабочего участка, при этом транспортерная лента 180 содержит один или несколько нажимных элементов или блоков 182, интегрированных в ленту, или толкающих элементов, или толкающих стержней 184, которые могут, например, проходить от одной или от обеих сторон профилей до рельсов 160, 162 грузовой платформы/грузового контейнера для выборочного взаимодействия с грузом С, при этом толкающие стержни продвигаются вместе с грузом относительно грузовой платформы / грузового контейнера в заданное место на рабочем участке. После снятия груза С с грузовой платформы / грузового контейнера АРР/В грузовая платформа / грузовой контейнер АРР/В загружается в пространство 102 транспортного средства для возвращения на склад для следующей доставки.
[0023] Чертежи с Фиг. 42 по Фиг. 45 иллюстрируют перемещение грузовой платформы / грузового контейнера АРР/В из узла PLA механического погрузчика на механизированное гусеничное устройство 200. Например, гусеничное устройство 200 содержит первую и вторую непрерывные гусеницы или ленты 202, 204, установленные на раме 206. На раме 206 размещается грузовая платформа / грузовой контейнер АРР/В, при этом если грузовая платформа / грузовой контейнер содержит ролики, то рама выполнена с возможностью поддержки роликов над поверхностью земли. Рама 206 может содержать обращенные вверх роликоподшипники или т.п., для обеспечения перемещения грузовой платформы / грузового контейнера АРР/В от узла PLA механического погрузчика на гусеничное устройство 200. Гусеницы или ленты 202, 204 обеспечивают перемещение гусеничного устройства 200 на рабочем участке, в особенности на участке, имеющем неровную поверхность, которая является обычно труднопроходимой для колес. Путем модификации рамы с целью обеспечения различных эксплуатационных свойств, гусеничное устройство 200 может иметь другое применение, например, в сельском хозяйстве, когда рама 206 отделяет ленты 202, 204 друг от друга для перемещения вдоль проходов по обе стороны рядов растений.
[0024] Ниже перечислены и описаны дополнительные конкретные конструктивные элементы.
[0025] Опоры и рельсы выполнены из алюминиевых экструдированных профилей. Для самых различных целей в деталях экструдированием выполнены каналы. В опорном узле форма канала позволяет размещать аккумуляторные батареи для питания двигателей с целью приведения в действие узла механического погрузчика. Предпочтительно, аккумуляторные батареи соединены вместе для питания двигателей. Специалисту в данной области техники также понятно, что аккумуляторные батареи не обязательно должны быть установлены в опорах / рельсах узла, они могут быть установлены отдельно в разных местах на транспортном средстве или на узле механического погрузчика или, в качестве альтернативы, может также использоваться подключаемое питание, либо питание от транспортного средства, либо от другого источника питания.
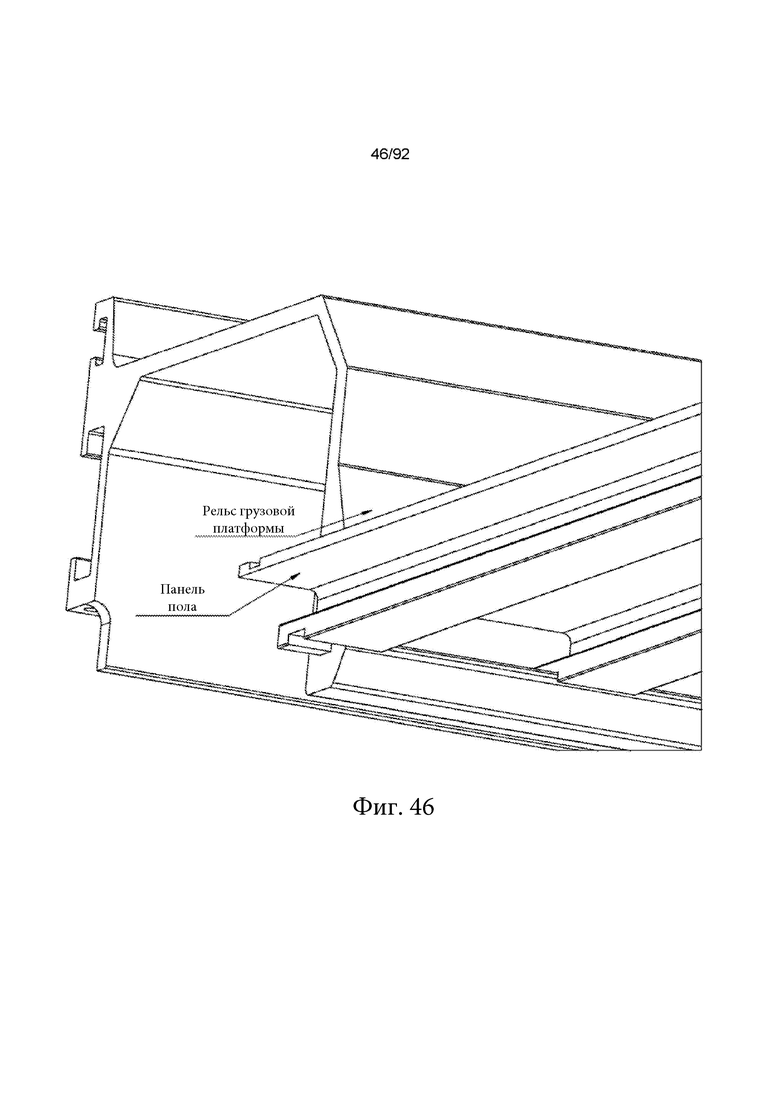
[0026] Алюминиевые экструдированные детали рельсов грузовой платформы / грузового контейнера имеют каналы для скольжения в них панелей пола, благодаря чему достигается цельно-алюминиевый узел без сварных швов и болтов (Фиг. 46).
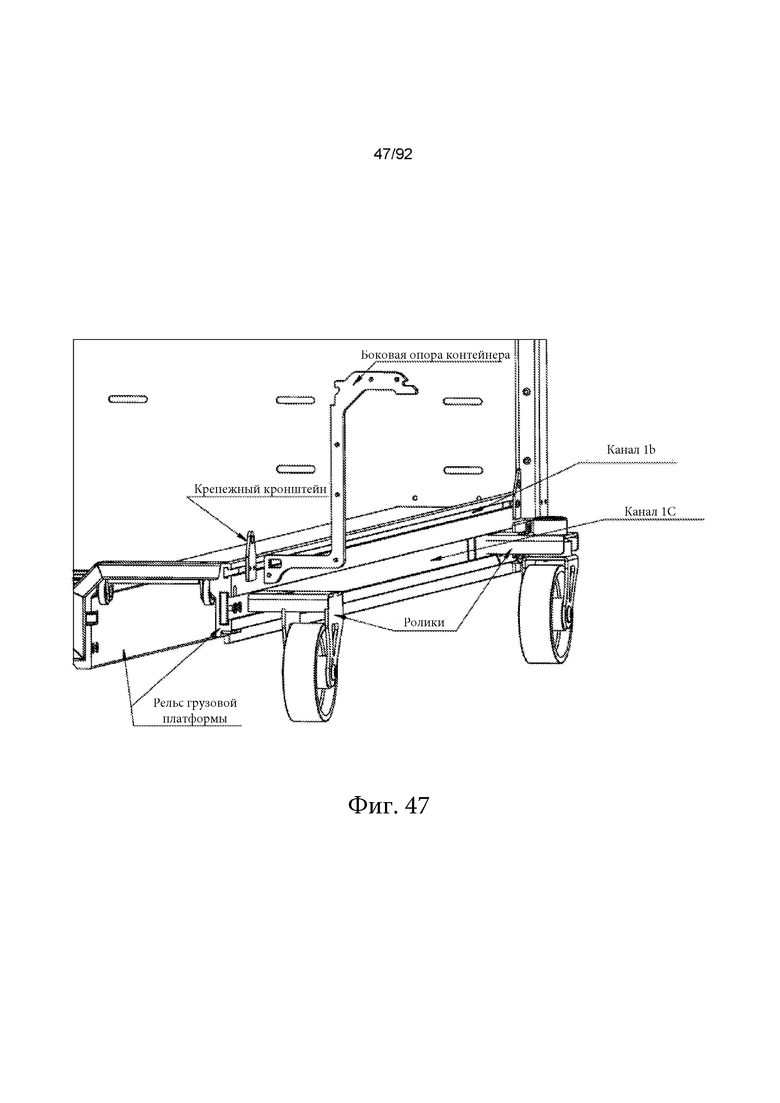
[0027] Каналы экструдированы в рельсах грузовой платформы для крепления боковых опор грузового контейнера или для установки крепежных кронштейнов (Фиг. 47).
[0028] Экструдированные рельсы грузовой платформы / грузового контейнера имеют каналы для скольжения роликов, обеспечивающие возможность скольжения назад передних роликов при закатывании грузовой платформы / грузового контейнера в грузовой автомобиль. Без этого свойства ролики будут попадать в колесные ниши грузового автомобиля, препятствуя размещению грузовой платформы / грузового контейнера в стандартном кузове грузового автомобиля малой грузоподъемности (Фиг. 47).
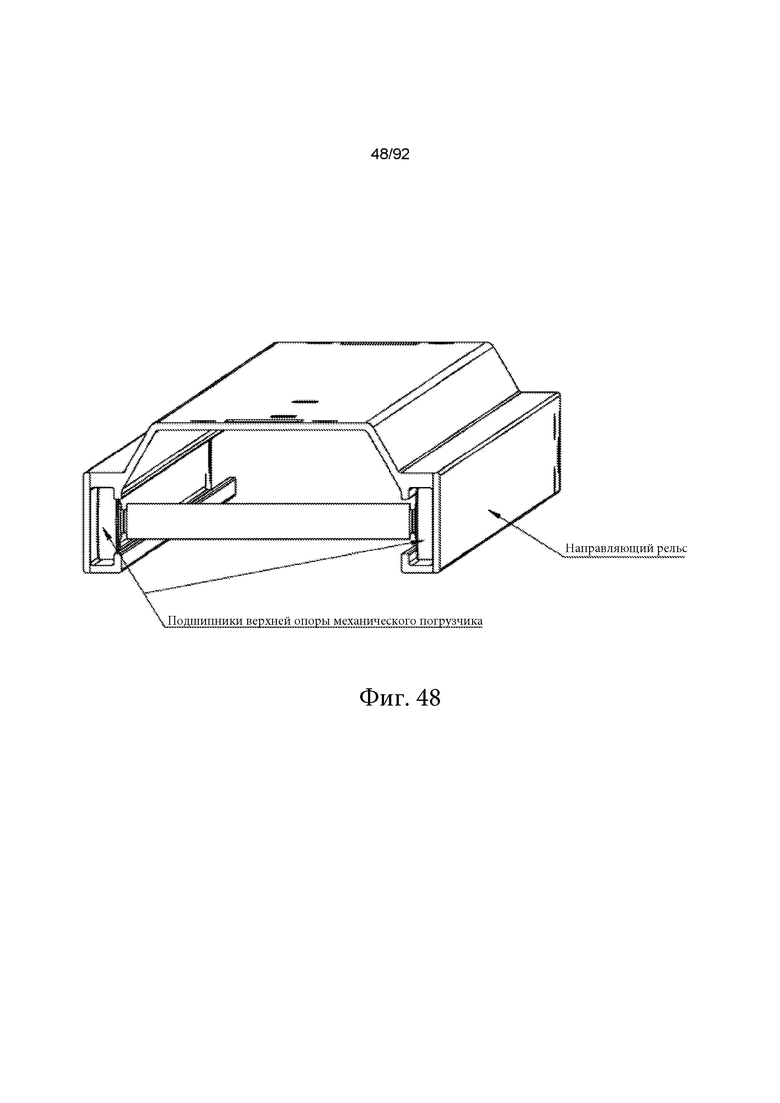
[0029] В направляющем рельсе имеются каналы для качения подшипников верхней опоры механического погрузчика (Фиг. 48).
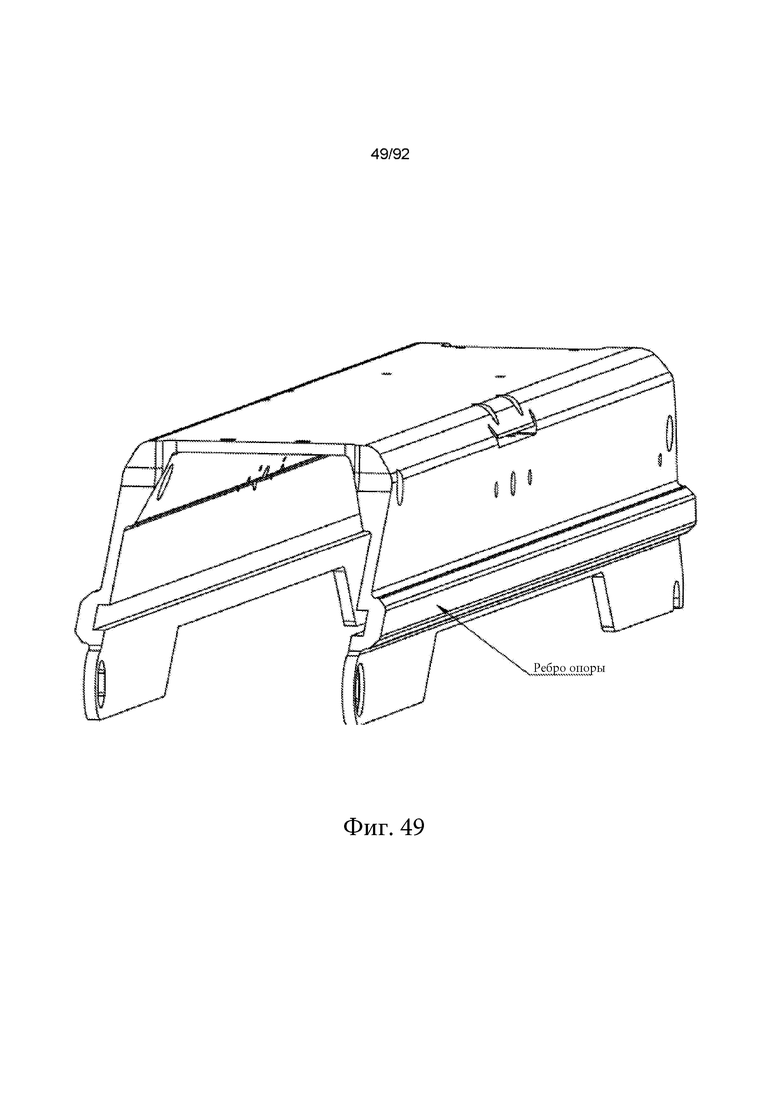
[0030] Для увеличения прочности наружные опоры содержат проходящие по всей длине ребра. На внутренней стороне этих ребер выполнен канал для скольжения ползунка фиксатора 14 (Фиг. 49).
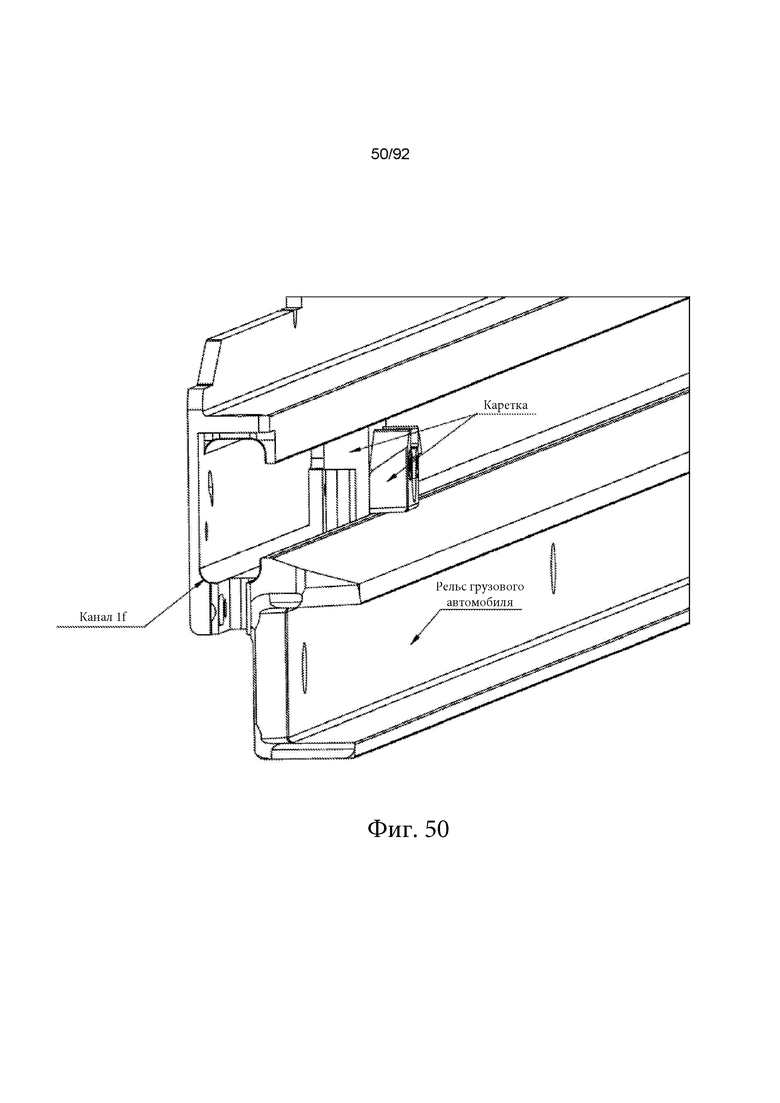
[0031] В рельсах грузового автомобиля имеется канал для перемещения в нем каретки. Эта каретка используется для втягивания грузовой платформы и механического погрузчика в кузов грузового автомобиля и или выталкивания их из него (Фиг. 50).
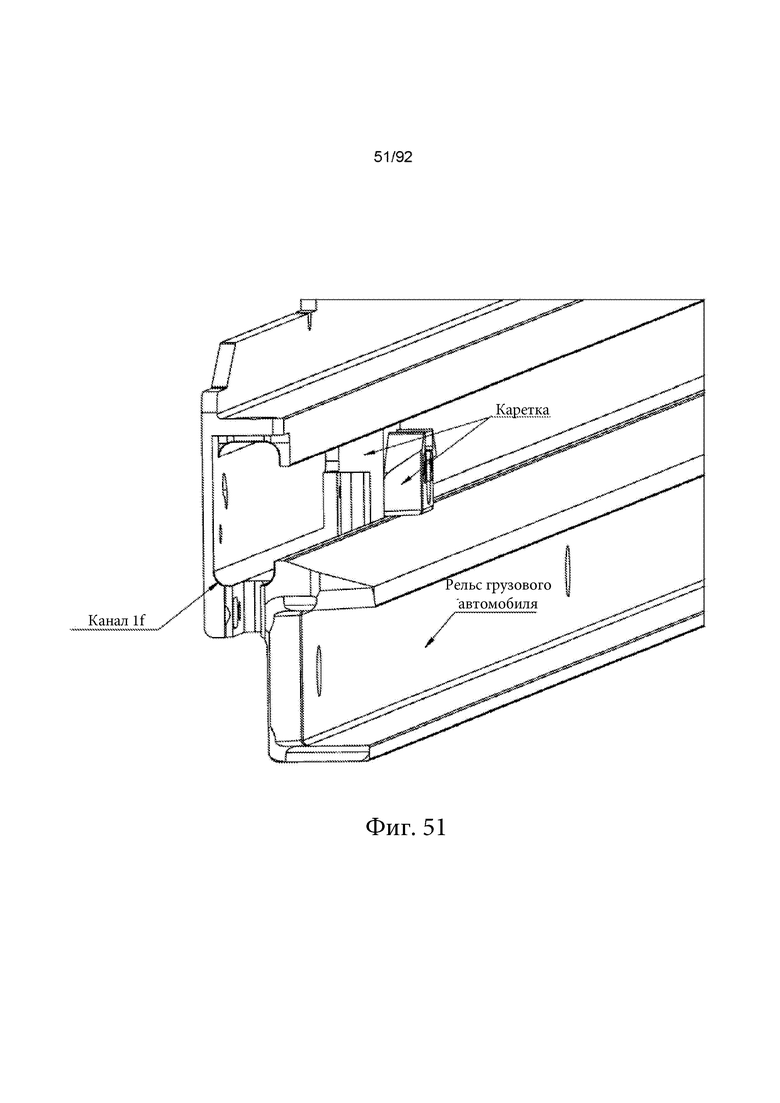
[0032] Направляющие рельсы установлены в кузове грузового автомобиля для закатывания как механического погрузчика, так и грузовой платформы / грузового контейнера (Фиг. 2 и Фиг. 51). Когда задние опоры поднимаются в сложенное положение, они находятся в подвешенном положении, поддерживаемые рельсами грузового автомобиля.
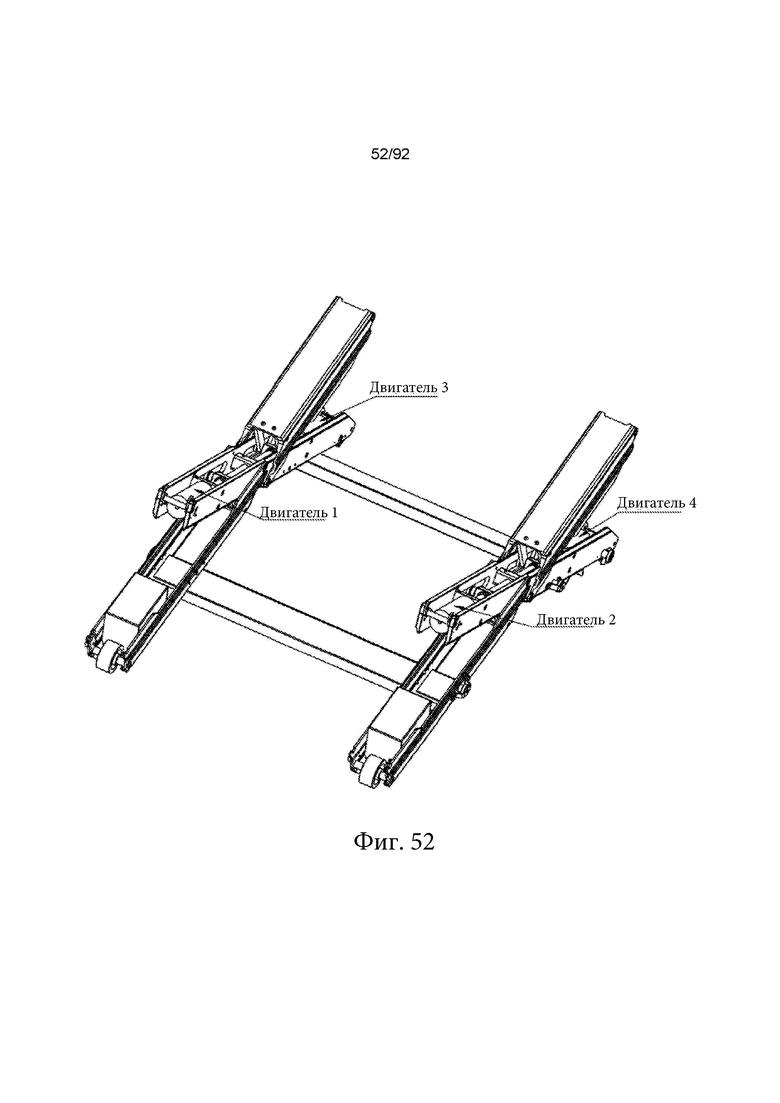
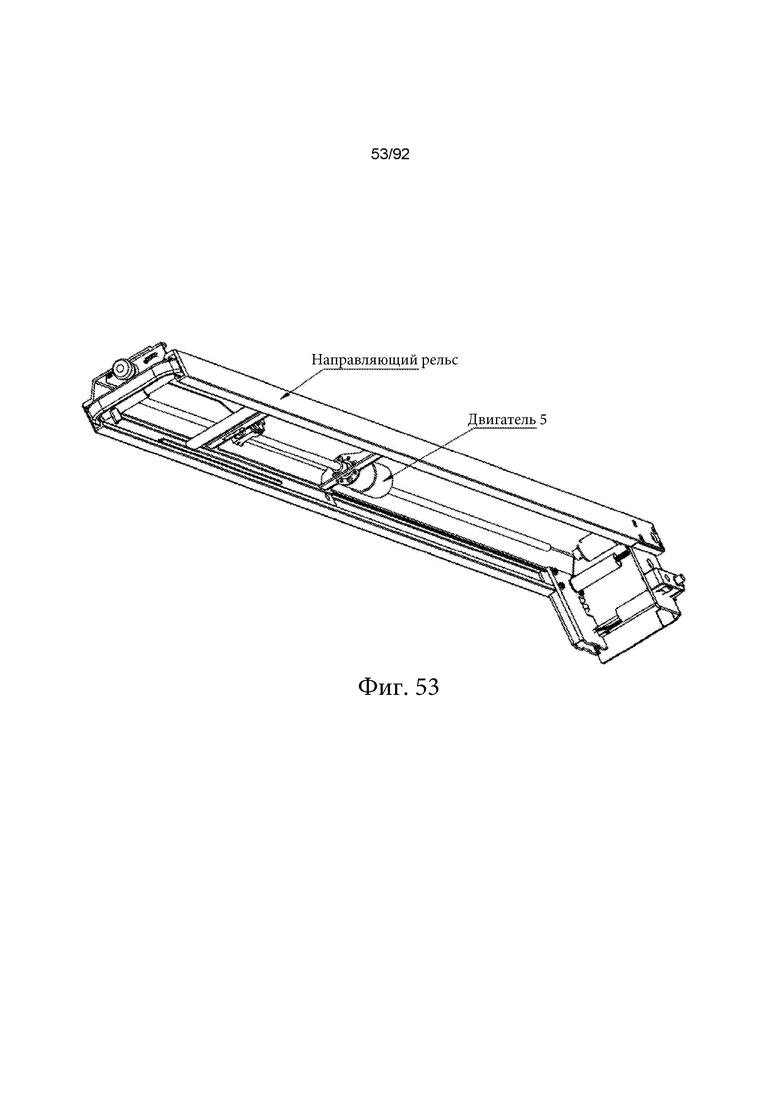
[0033] Предпочтительно, в опорах механического погрузчика имеется четыре двигателя, обеспечивающие независимое управление каждой опорой. Это дает возможность регулировать угол наклона вперед и назад, а также из стороны в сторону для корректирования различных уровней поверхности земли (Фиг. 52). Двигатели предпочтительно расположены в средней опоре, которая состоит из двух плоских стержней, соединенных болтами с использованием монтажных опор двигателя и концевого опорного блока для ходовых винтов. Каждый двигатель вращает ходовой винт, который приводит в движение толкающий блок, который перемещается в канале, механически выполненном в сторонах внутренней опоры. Приводные блоки имеют звенья, которые соединяют их с наружными опорами (Фиг. 53). Это аналогично тому, что изображено на Фиг. 12 в патенте США №9545869, где в такой конструкции используется один двигатель, ходовой винт имеет разный шаг на каждом конце и приводит в движение обе наружные опоры одновременно. В настоящем изобретении в каждой опоре имеются два двигателя с отдельными ходовыми винтами, поэтому управление каждой опорой осуществляется независимо. Раздвижная гайка, изображенная на Фиг. 25 в патенте США №9545869, в настоящем устройстве не используется.
[0034] Пятый двигатель предпочтительно установлен в направляющем рельсе для перемещения опор назад, чтобы передняя опора могла быть поднята без удара о бампер (Фиг. 53).
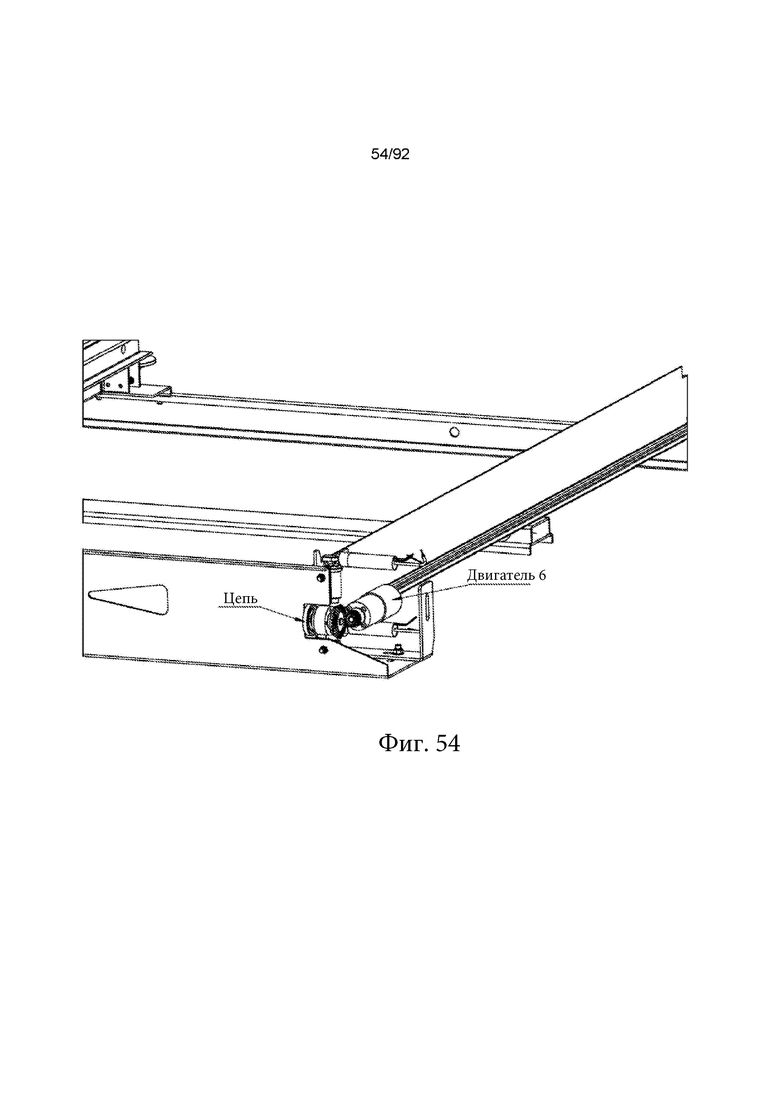
[0035] Шестой двигатель установлен на рельсах грузового автомобиля и приводит в действие цепь, которая, в свою очередь, приводит в действие каретку для перемещения узла PLA механического погрузчика и грузовой платформы АРР/В в грузовой автомобиль 100 и из него. Вместо цепи может использоваться ходовой винт (Фиг. 54).
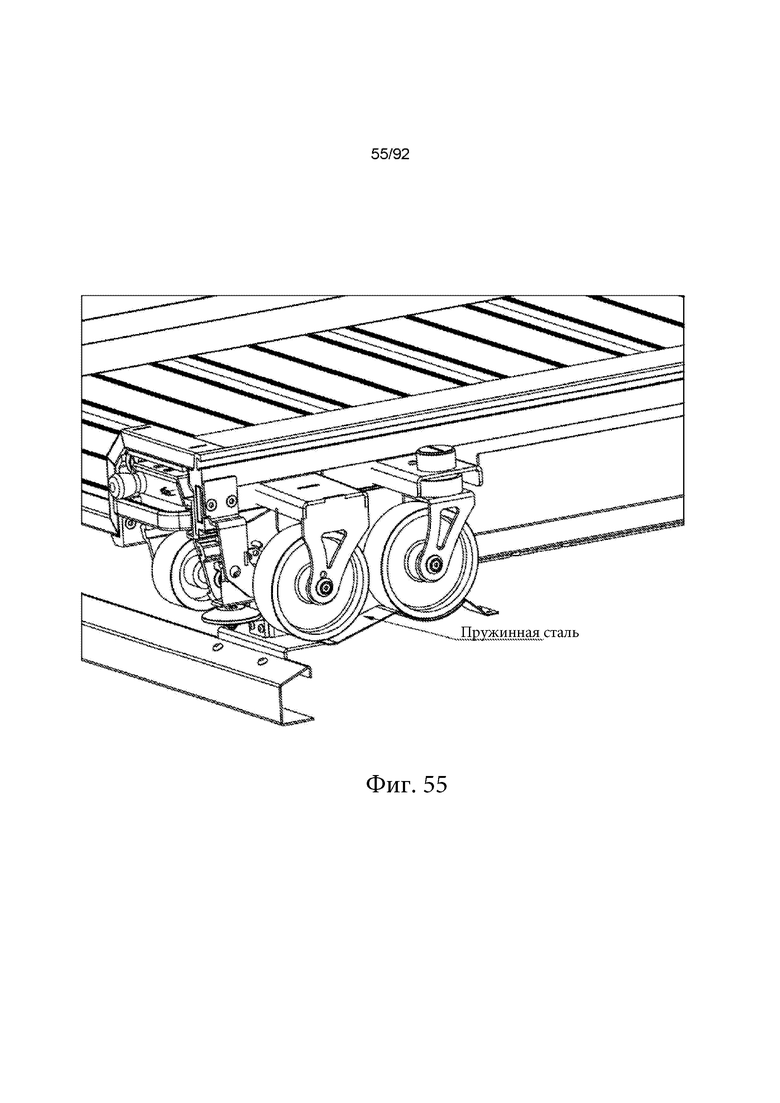
[0036] Когда грузовая платформа АРР/В закатывается на рельсы грузового автомобиля, ролики 168 закатываются на листовые рессоры 250 возле рельсов грузового автомобиля, при этом листовые рессоры немного замедляют ролик для уменьшения трения между ползунком ролика и каналом, в котором они скользят. Эта опора, представленная листовой рессорой, имеет углубление для удерживания ролика в платформе грузового автомобиля при выкатывании грузовой платформы, так что ролик возвращается обратно к передней части грузовой платформы (Фиг. 55).
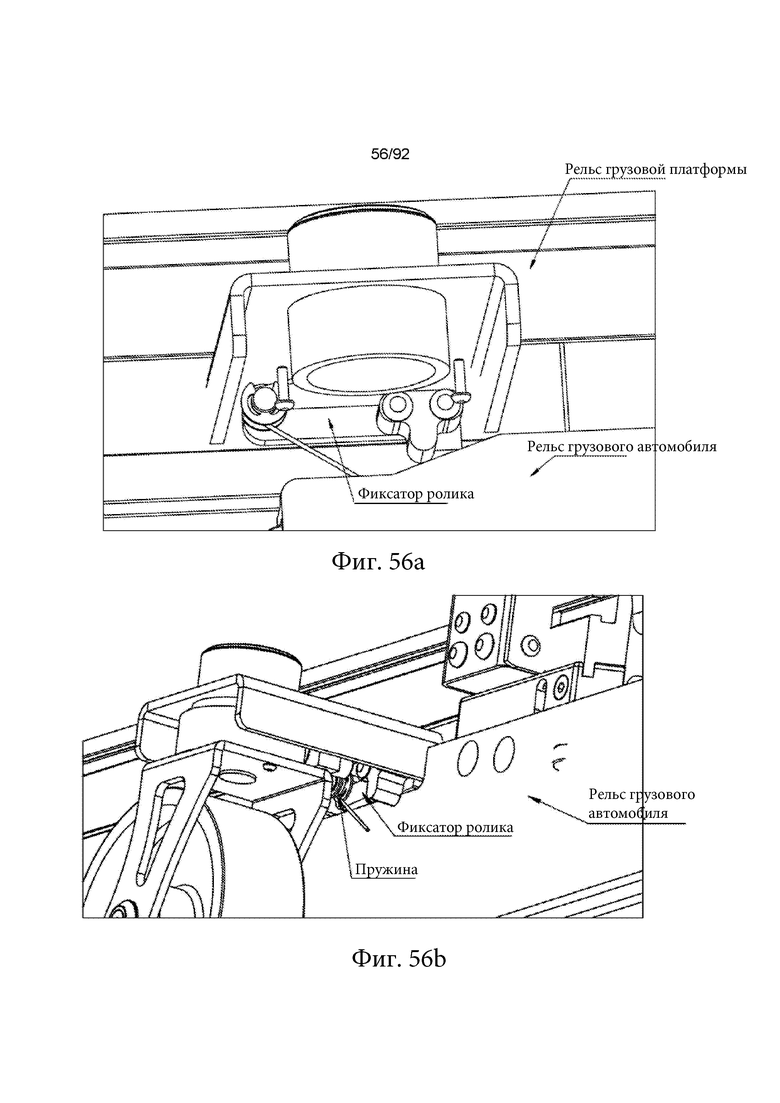
[0037] На роликах имеется фиксатор, который удерживает их от скольжения в канале при перемещении грузовой платформы по земле. Когда грузовая платформа АРР/В закатывается на рельсы грузового автомобиля, этот фиксатор на одном конце поднимается вверх направляющими рельсами, отсоединяя ролики от грузовой платформы, и дает возможность роликам скользить обратно в канал 1С грузовой платформы (Фиг. 56А и Фиг. 56 В).
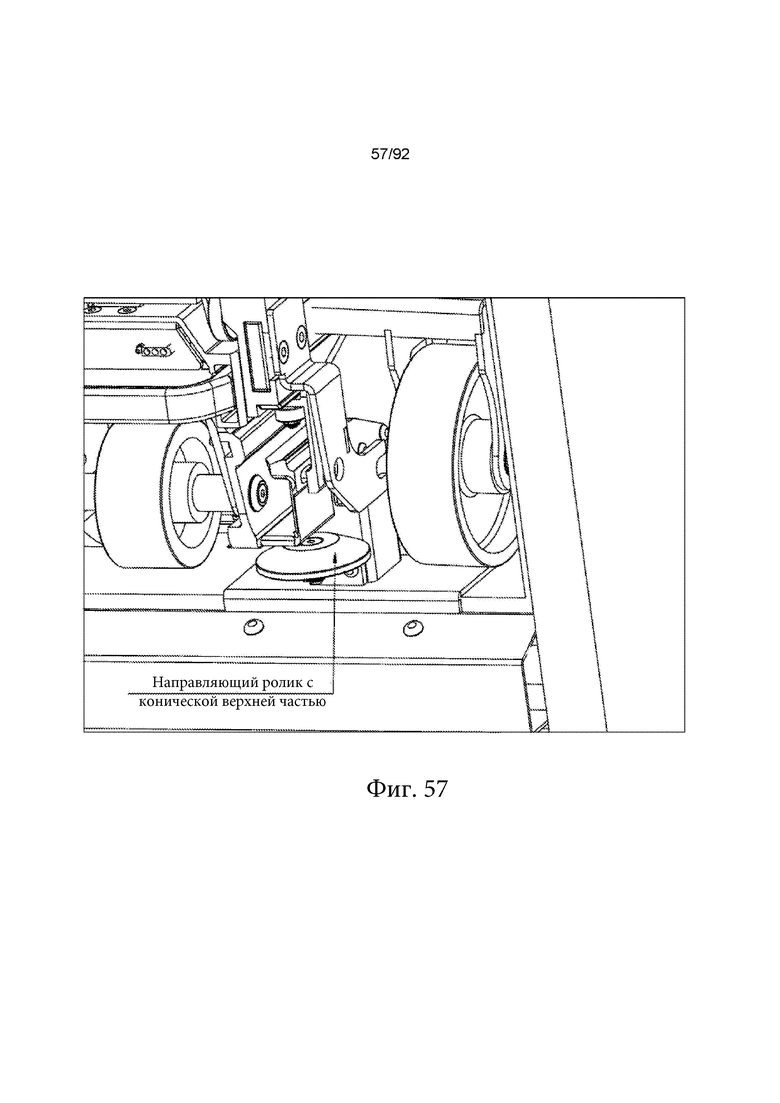
[0038] На входе в рельсы грузового автомобиля установлены ролики для направления направляющего рельса и грузовой платформы / грузового контейнера на рельсы. Эти ролики имеют коническую верхнюю поверхность, поэтому, если направляющий рельс или грузовая платформа расположены слегка ниже, то при направлении вовнутрь они будут подниматься вверх по направляющим вместе с рельсами грузового автомобиля (Фиг. 57).
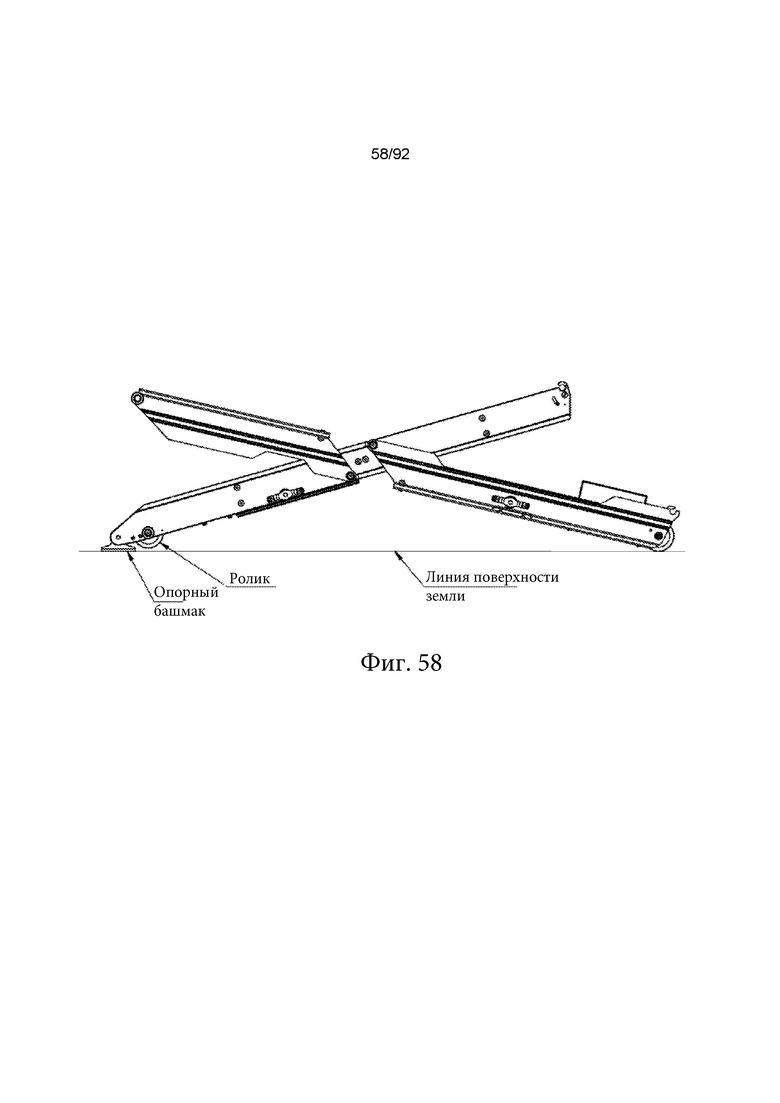
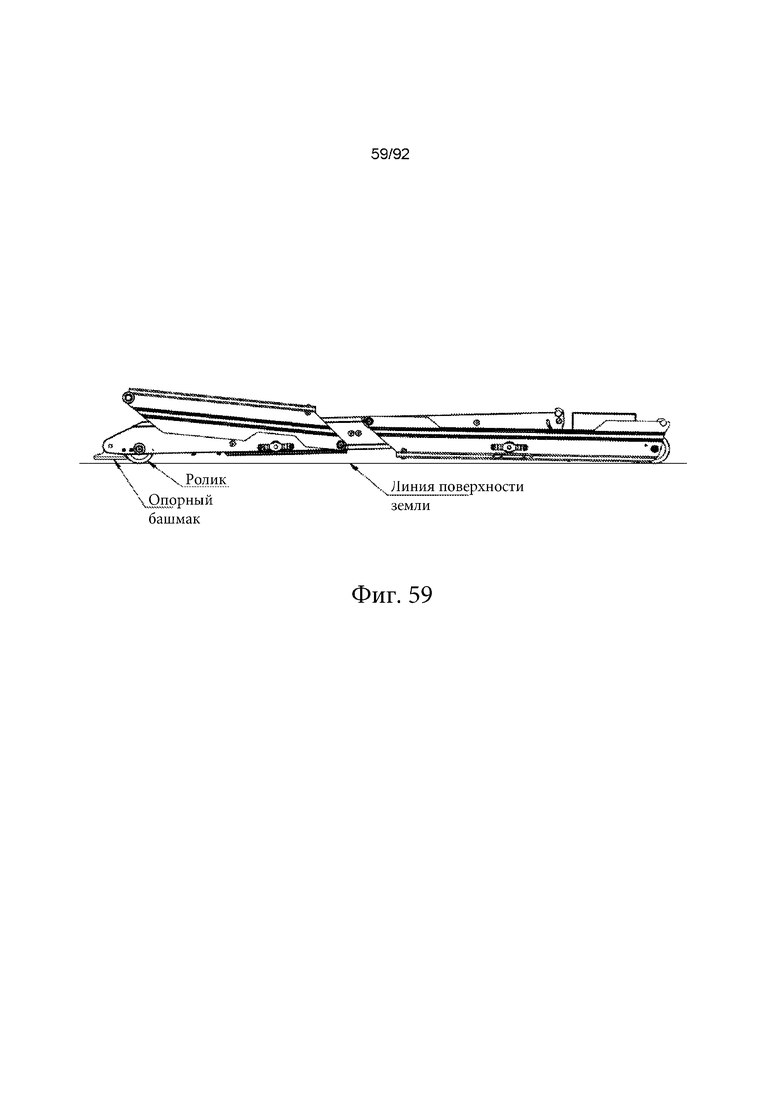
[0039] Передние опоры механического погрузчика имеют вместо колес опорные башмаки, которые при подъеме погрузчика находятся на земле. Это препятствует качению механического погрузчика при погрузке и разгрузке грузовой платформы (Фиг. 58). Когда механический погрузчик поднимается на небольшое расстояние от земли, колеса, установленные за опорными башмаками, контактируют с землей, позволяя механическому погрузчику перемещаться качением вперед и назад вместе с расположенной на нем грузовой платформой или без нее (Фиг. 59).
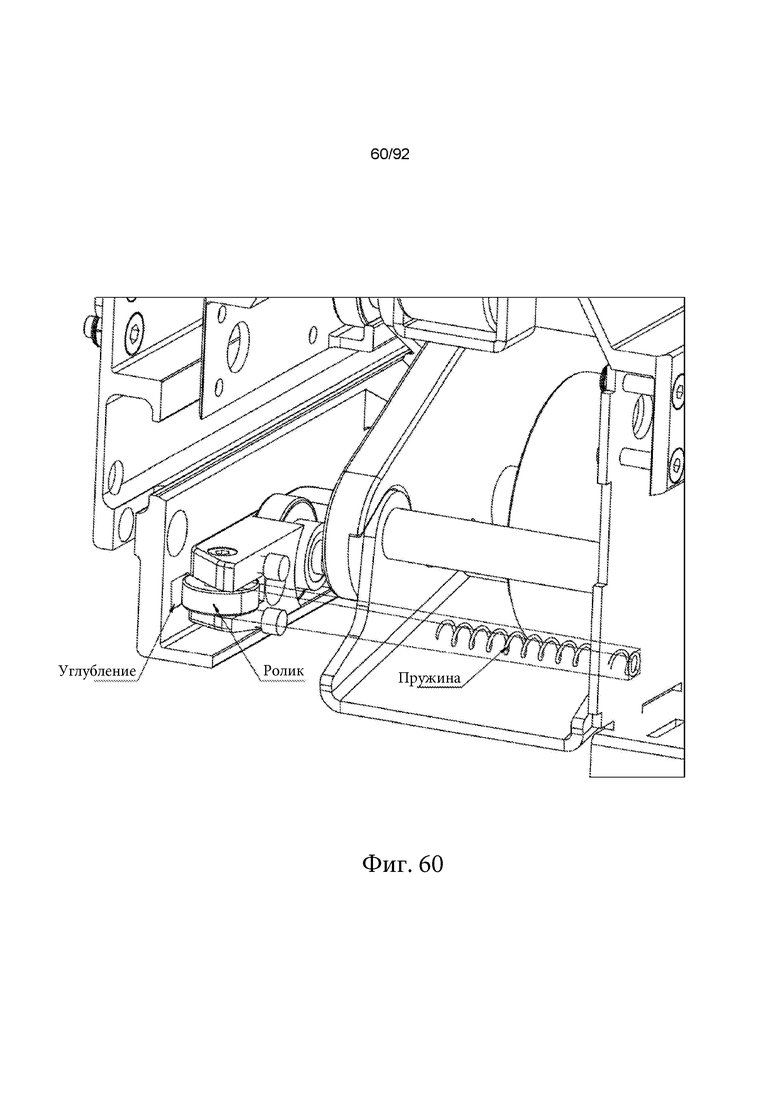
[0040] Спереди и сбоку направляющего рельса установлены ролики, которые направляют его вовнутрь и удерживают по центру рельсов грузового автомобиля. Эти ролики подпружинены в наружном направлении. В рельсах грузового автомобиля имеются углубления для взаимодействия с этими роликами. При взаимодействии роликов с этими углублениями обеспечивается совмещение штифтов соленоида с их контровочными отверстиями (Фиг. 60).
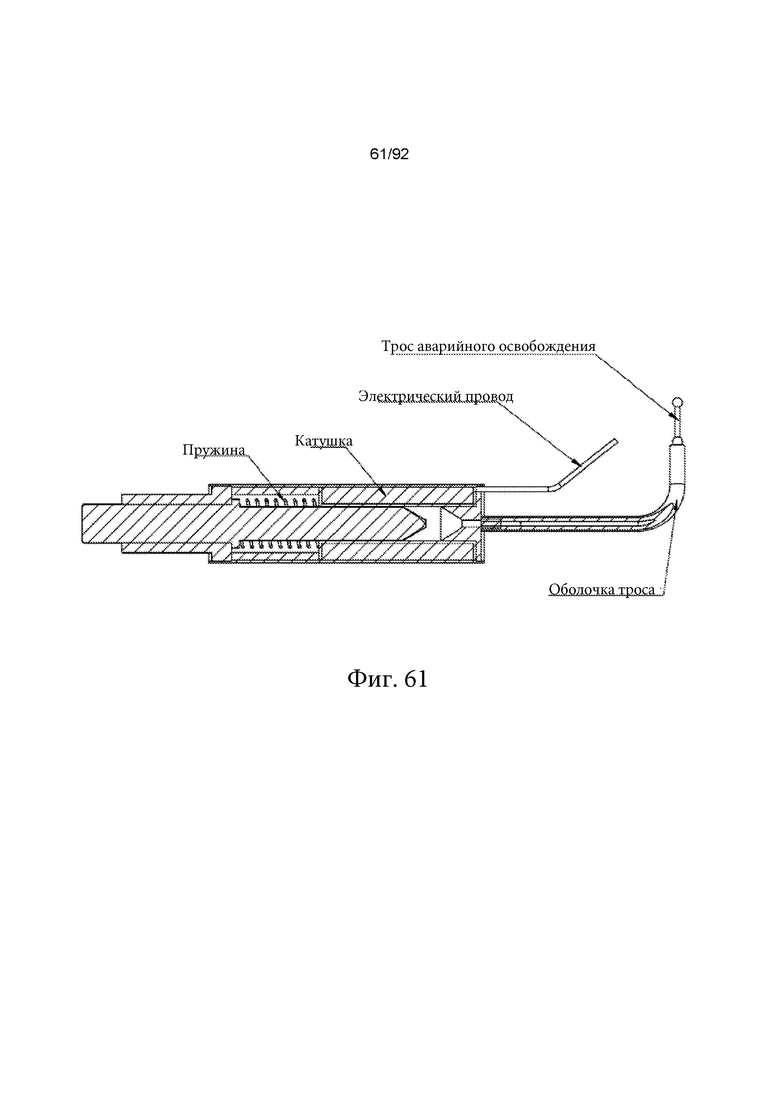
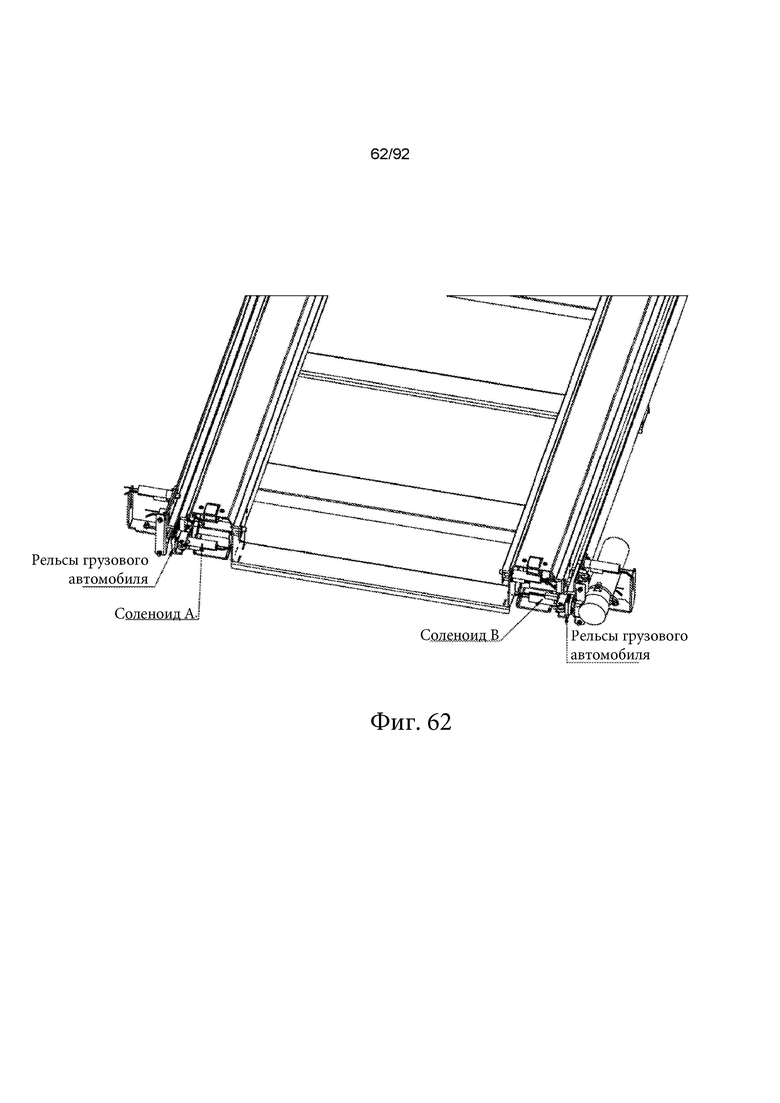
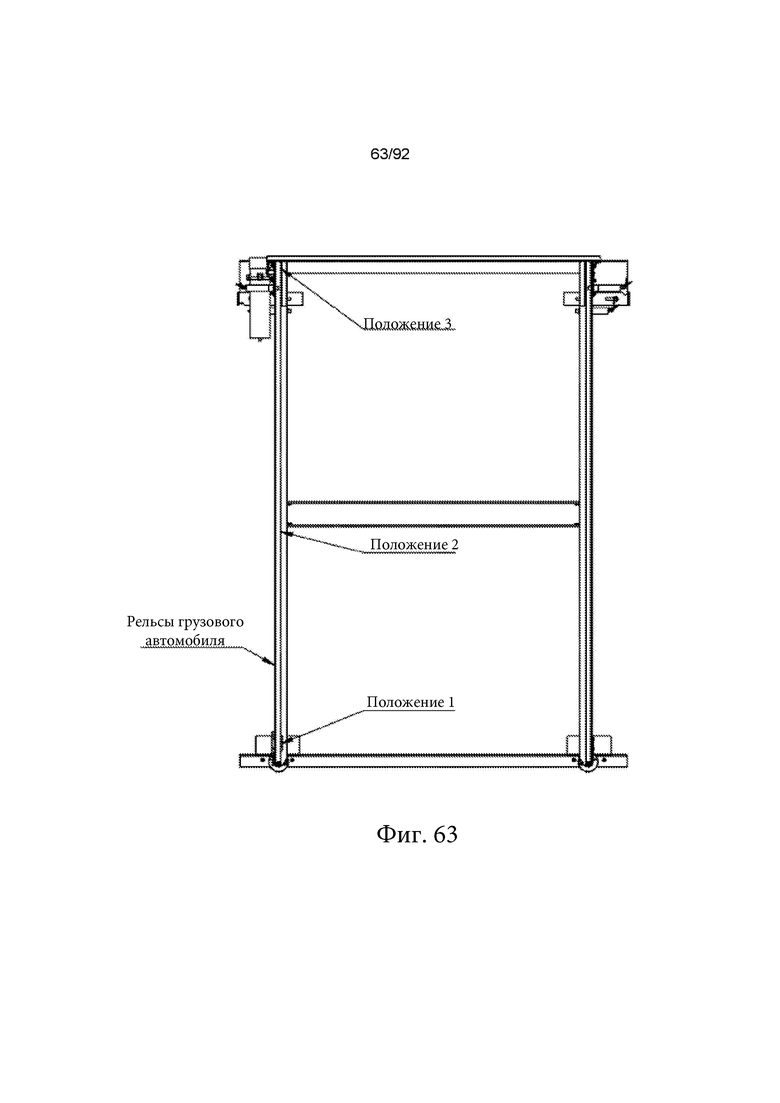
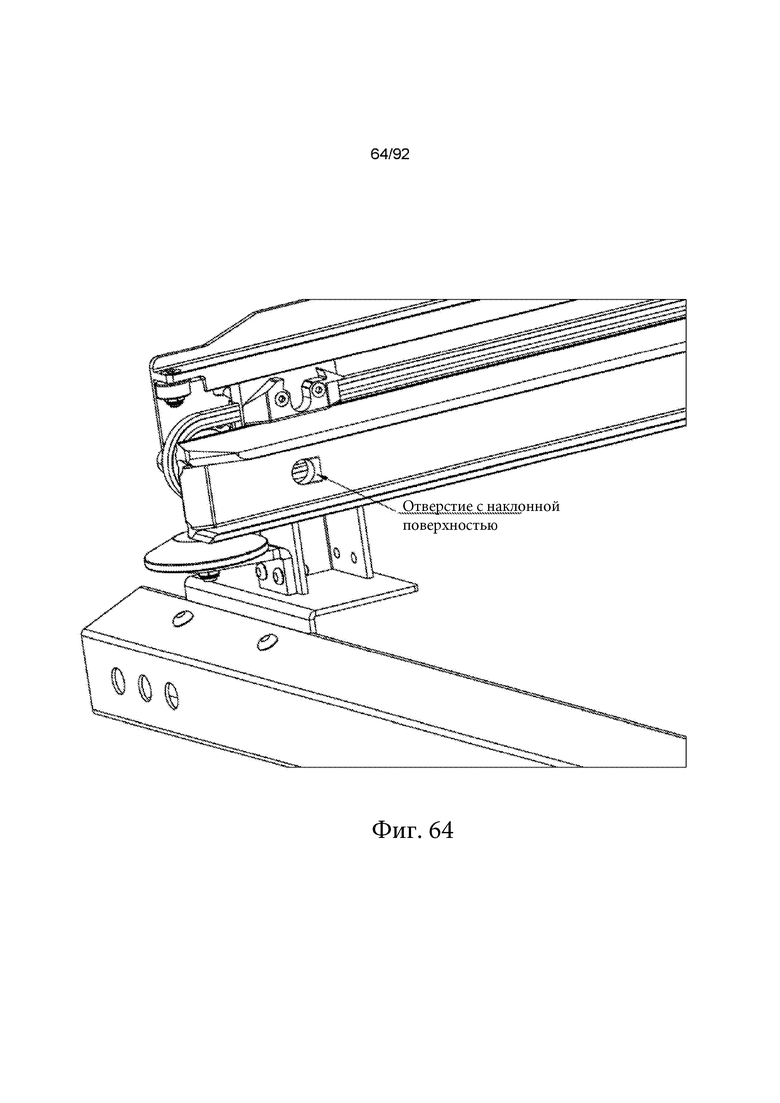
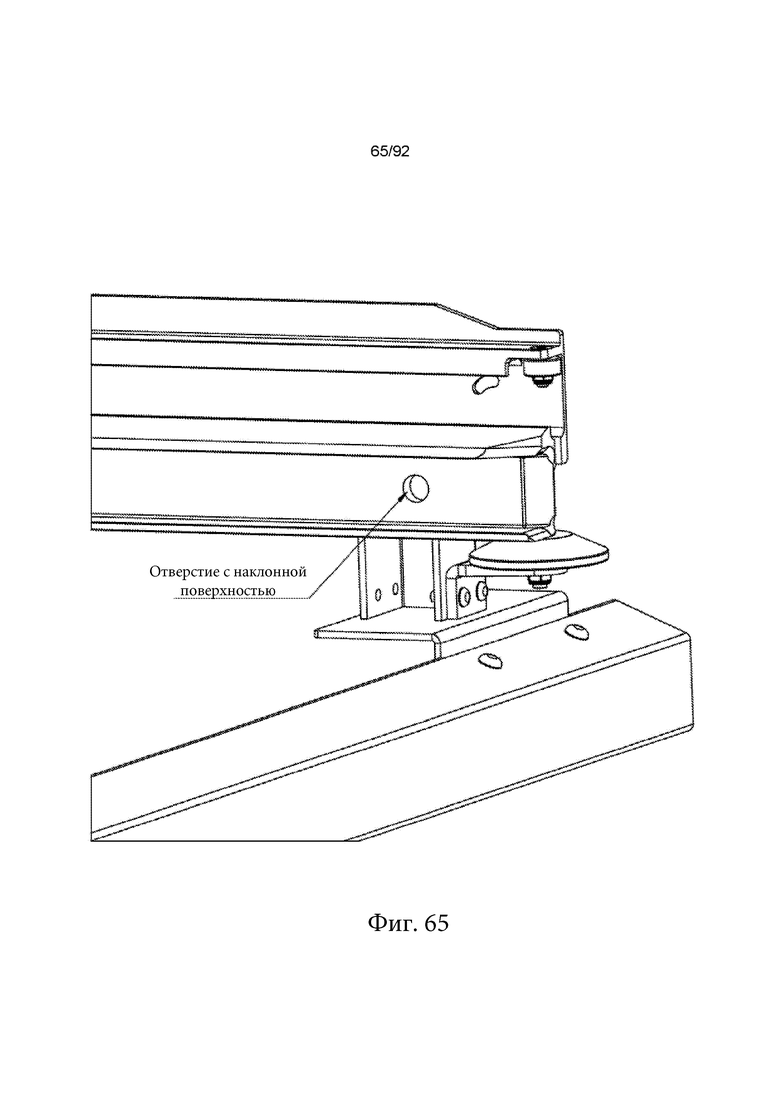
[0041] Соленоиды используются во всем механическом погрузчике для закрепления деталей в рельсах или на рельсах. Два соленоида (D и G) из этих соленоидов представляют собой соленоиды стандартного толкающего типа. Девять соленоидов из этих соленоидов представляют собой соленоиды специально разработанного тянущего типа, шток которых действует как штифт, входящий в отверстие для фиксации частей на месте. Они отличаются тем, что выполнены как единое целое с подпружиненным штоком и катушкой в одном корпусе. Другое отличительное свойство заключается в том, что к штоку присоединен небольшой трос, поэтому при невозможности электрической активации трос может быть вытянут вручную, чтобы разблокировать соленоид (см. Фиг. 61). Эти соленоиды выполняют следующие функции. Во-первых, соленоиды А и В управляют штифтами, которые расположены в передней части направляющего рельса (Фиг. 62) и закрепляют его на рельсах грузового автомобиля в трех местах: (а) с задней стороны рельсов грузового автомобиля для удержания направляющих рельсов на рельсах грузового автомобиля при закатывании и выкатывании грузовой платформы / грузового контейнера; (b) в точке посередине рельсов грузового автомобиля для удерживания направляющего рельса и механического погрузчика на месте, когда задние опоры подняты в подвешенное и вставленное положение; и (с) спереди на рельсах грузового автомобиля для удерживания направляющего рельса и механического погрузчика в грузовом автомобиле при движении последнего (Фиг. 63). В каждом из этих положений штифты входят в отверстия или углубления в рельсах грузового автомобиля. При этом отверстия в положениях 1 и 2 с левой стороны имеют наклонные поверхности на своей передней кромке (Фиг. 64), а отверстия на правой стороне не имеют таких поверхностей (Фиг. 65). Это позволяет перемещать направляющий рельс из положения 1 в положение 2 и из положения 2 в положение 3 без приведения соленоида А в действие. Это необходимо для того, чтобы при парковке грузового автомобиля с уклоном назад не требовалось отключение обоих соленоидов А и В для перемещения направляющего рельса вперед. Одновременное отключение обоих соленоидов А и В в этой ситуации может привести к нежелательному откатыванию назад направляющего рельса и механического погрузчика и наружу из грузового автомобиля.
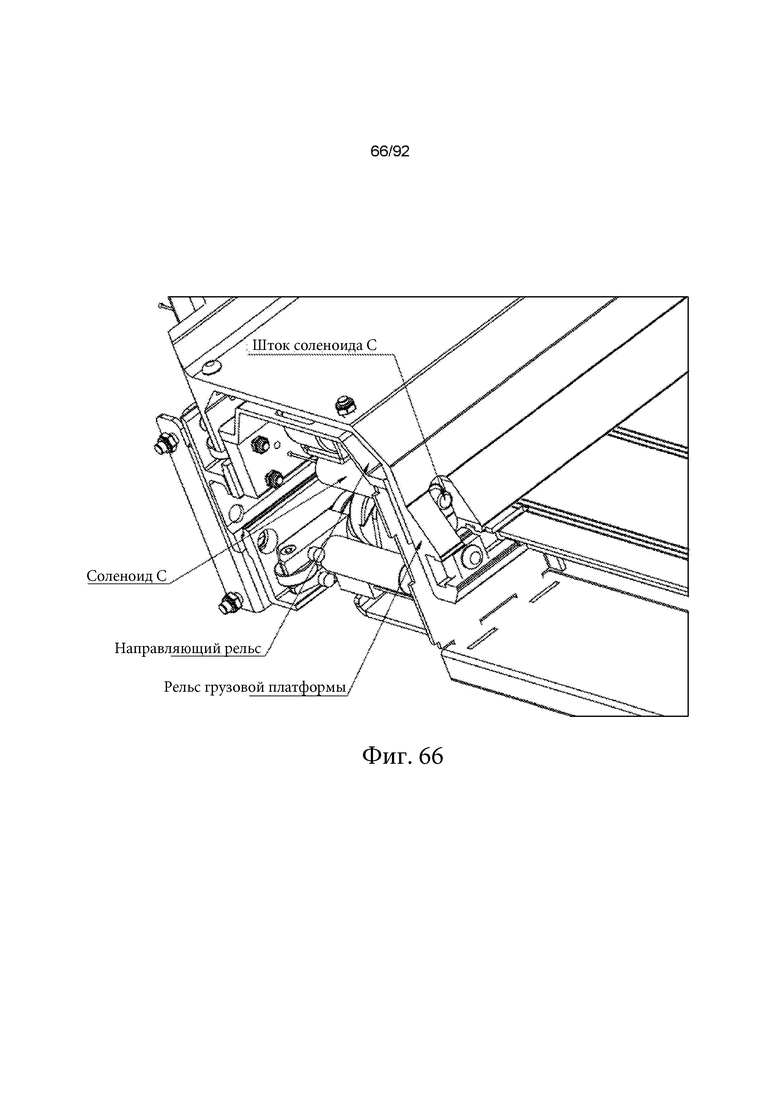
[0042] Во-вторых, соленоиды С (две штуки) управляют штифтами в направляющих рельсах, которые фиксируют АРР/В к PLA при подъеме и опускании и в режиме вываливания груза (Фиг. 66).
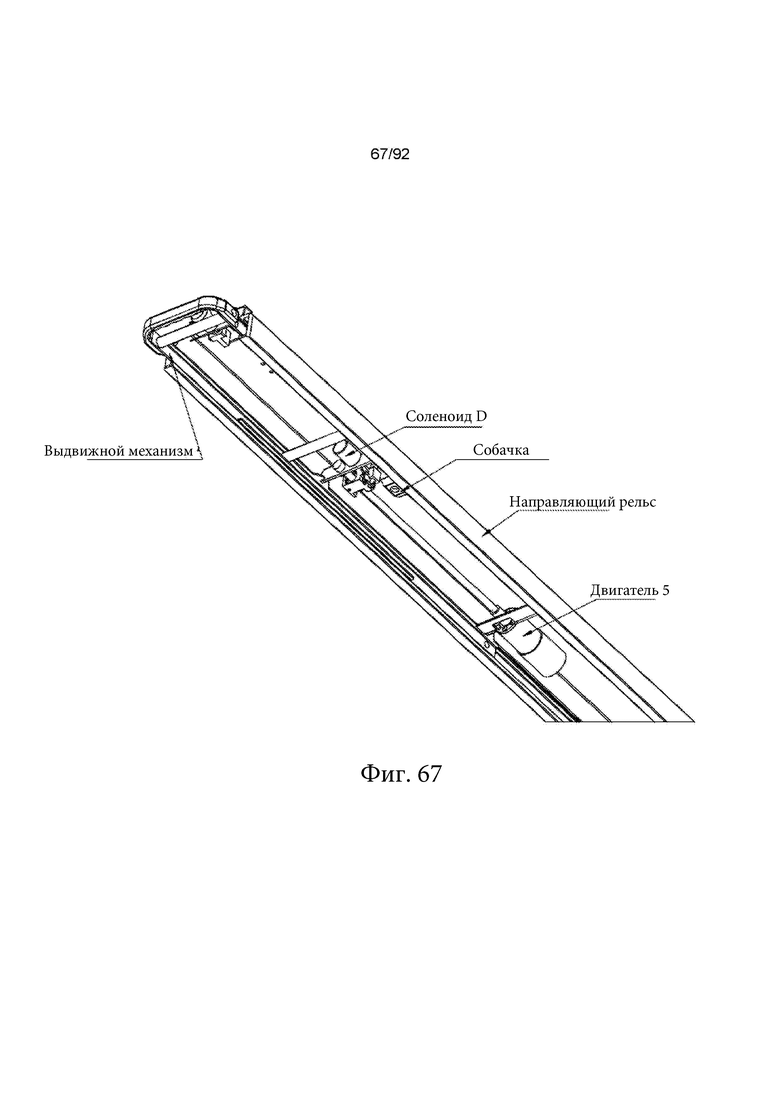
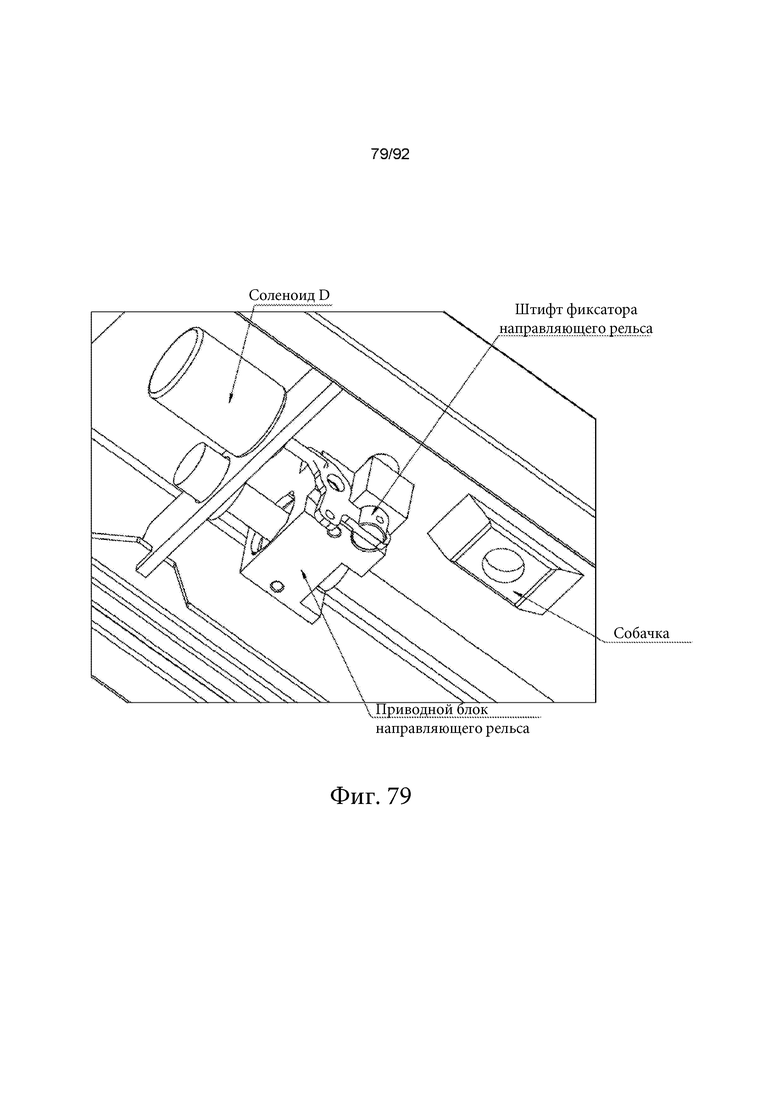
[0043] В-третьих, соленоид D (толкающего типа) используется для отключения механизма привода двигателя 5 в режиме вываливания груза (Фиг. 50, также см. Фиг. 79).
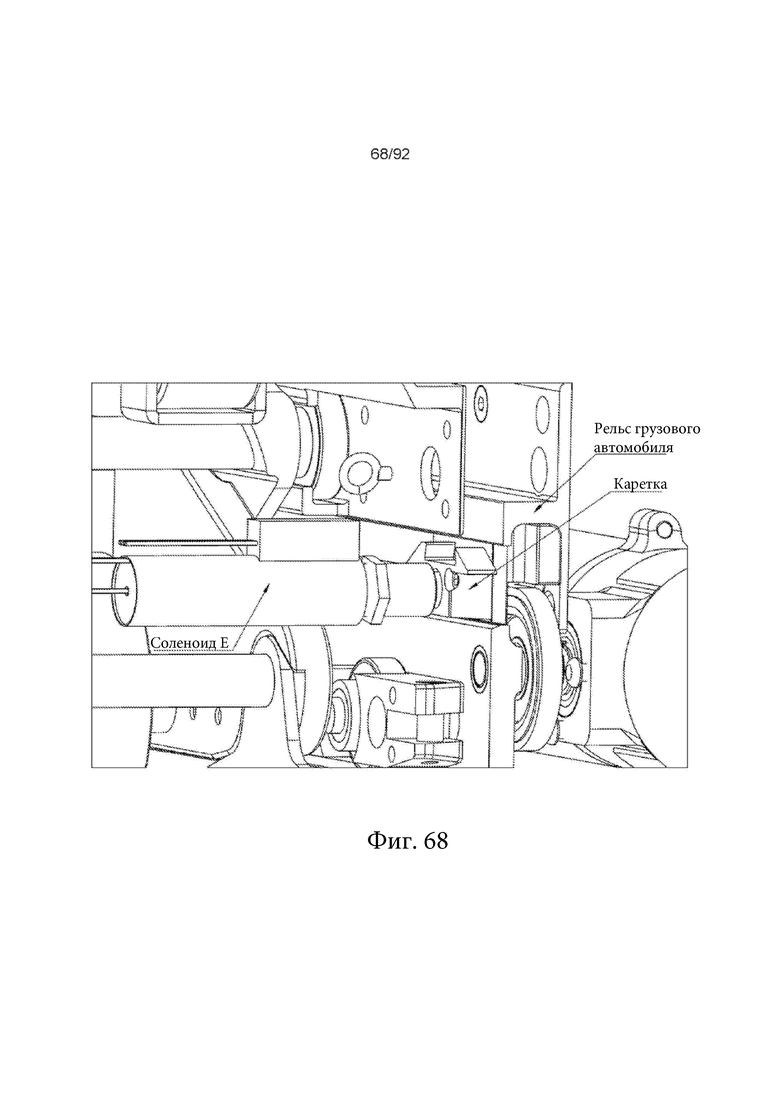
[0044] В-четвертых, соленоид Е управляет штифтом, который прикрепляет механический погрузчик к каретке (Фиг. 68).
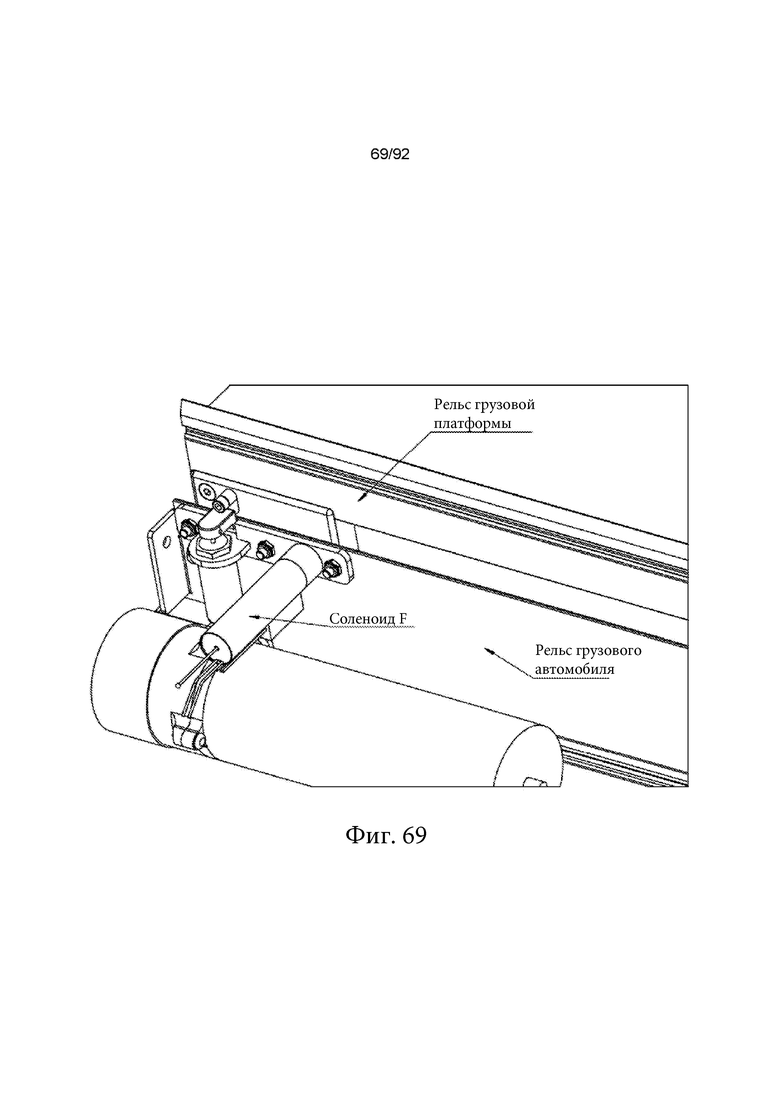
[0045] В-пятых, соленоиды F (две штуки) управляют штифтами, которые закрепляют грузовую платформу / грузовой контейнер на рельсах грузового автомобиля при перемещении последнего (Фиг. 69).
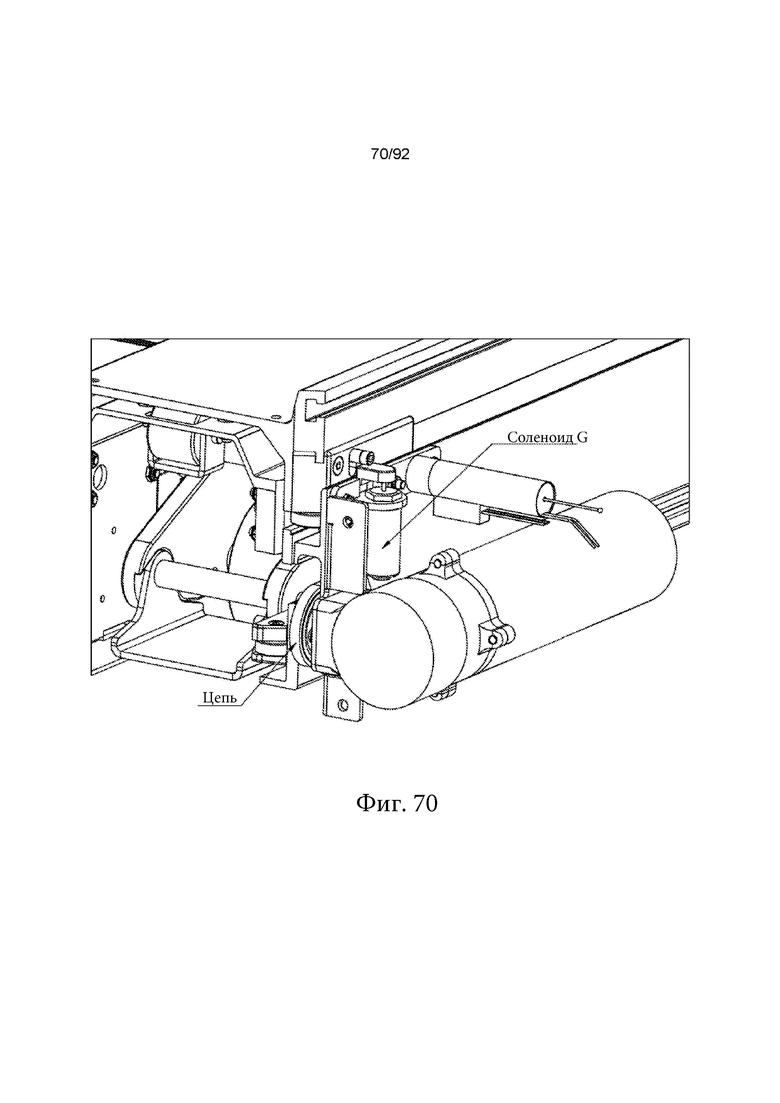
[0046] В-шестых, соленоид G (толкающего типа) используется для отсоединения фиксатора грузовой платформы / грузового контейнера от каретки при нахождении грузовой платформы / грузового контейнера в грузовом автомобиле (Фиг. 70). Это обеспечивает возможность возвращения каретки к задней части рельсов грузового автомобиля для закрепления с механическим погрузчиком и для втягивания его на рельсы грузового автомобиля.
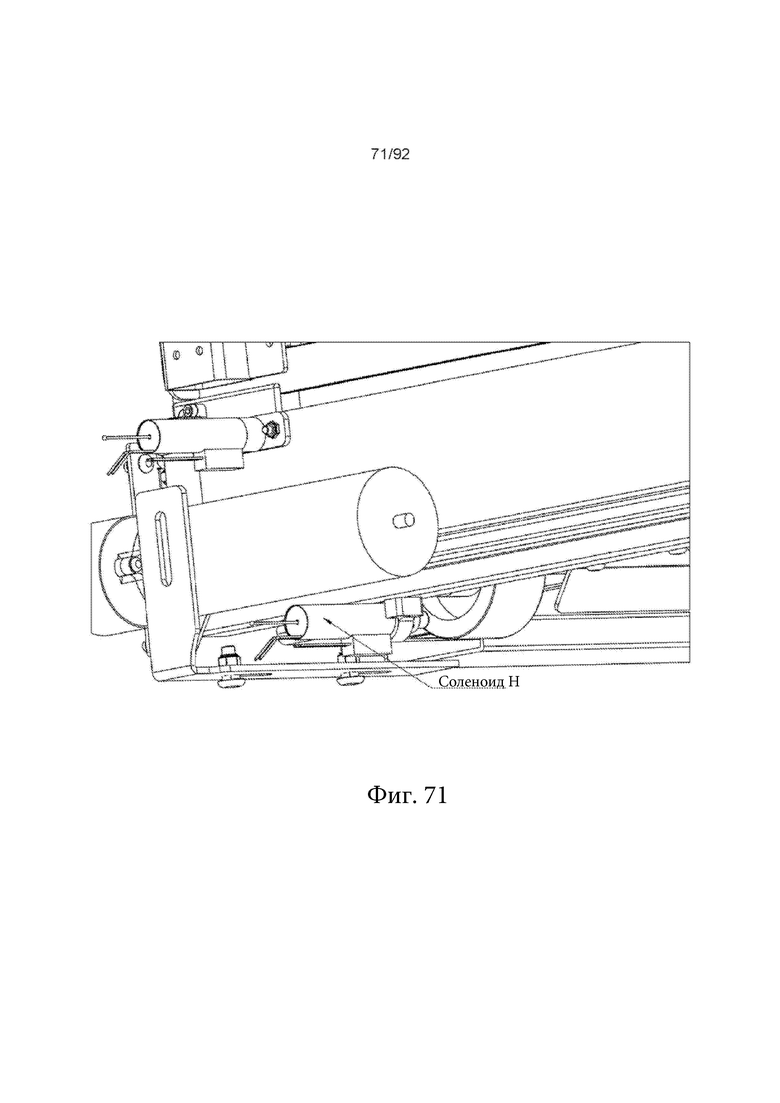
[0047] В-седьмых, когда механический погрузчик поднимает переднюю часть грузовой платформы / грузового контейнера для вываливания груза, он сначала откатывается назад на небольшое расстояние, чтобы колеса не задевали бампер, соленоид Н удерживает его в этом положении в режиме вываливания груза (Фиг. 71).
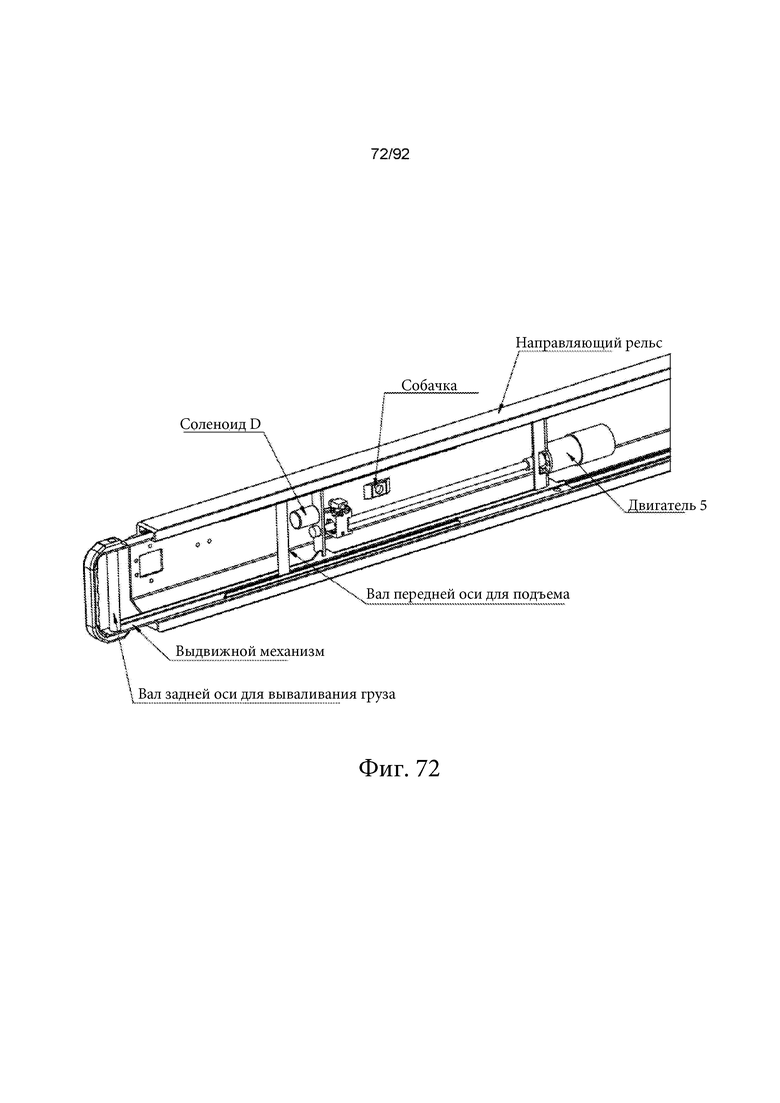
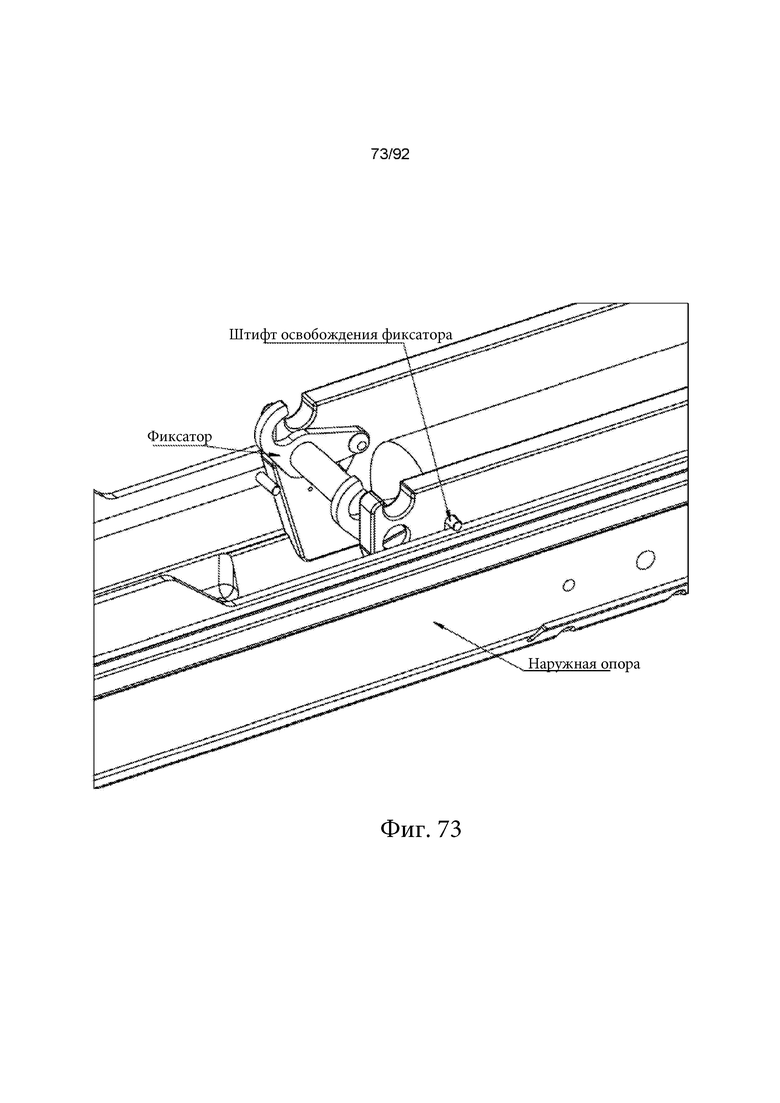
[0048] Когда механический погрузчик поднимает или опускает свои передние опоры, направляющие рельсы остаются зафиксированными с рельсами грузового автомобиля, создавая ситуацию, в которой механический погрузчик должен переместиться назад на небольшое расстояние, чтобы передние опоры не задевали бампер транспортного средства. В направляющем рельсе установлен выдвижной механизм, который соединен с задней опорой, что обеспечивает возможность перемещения механического погрузчика назад и обеспечивает передним опорам зазор относительно бампера грузового автомобиля. Этот выдвижной механизм может иметь двигатель (двигатель 5) и ходовой винт, установленный в нем для автоматического перемещения передних опор назад и вперед. Этот выдвижной механизм имеет две оси, причем при нормальном подъеме передняя ось контактирует с верхним фиксатором внутренней задней опоры (Фиг. 72), задняя ось контактирует с фиксатором на конце задних наружных опор для вываливания груза. Эти фиксаторы описаны ниже со ссылками на Фиг. 73 и Фиг. 74.
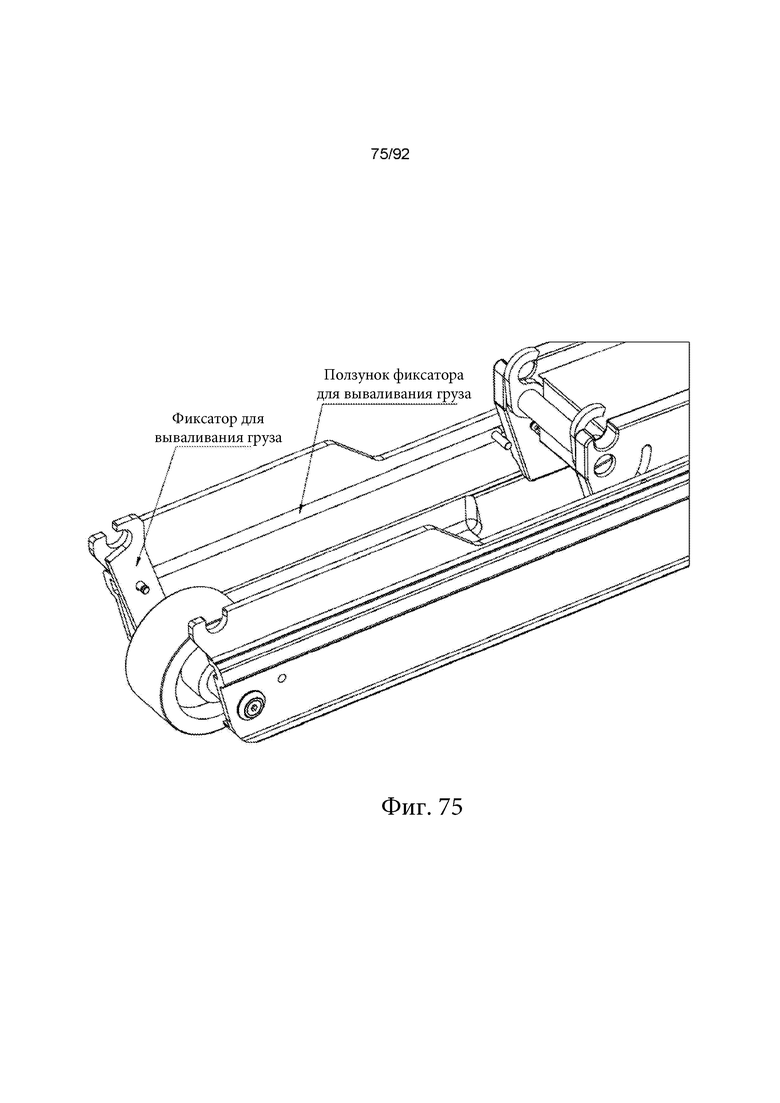
[0049] Фиксатор установлен в верхней части задней внутренней опоры для крепления его к передней оси в механизме скольжения при нормальном подъеме. Когда опоры вставлены, этот фиксатор автоматически выходит из зацепления, обеспечивая возможность подъема направляющих рельсов и грузовой платформы / грузового контейнера для погрузки и вываливания груза (Фиг. 75).
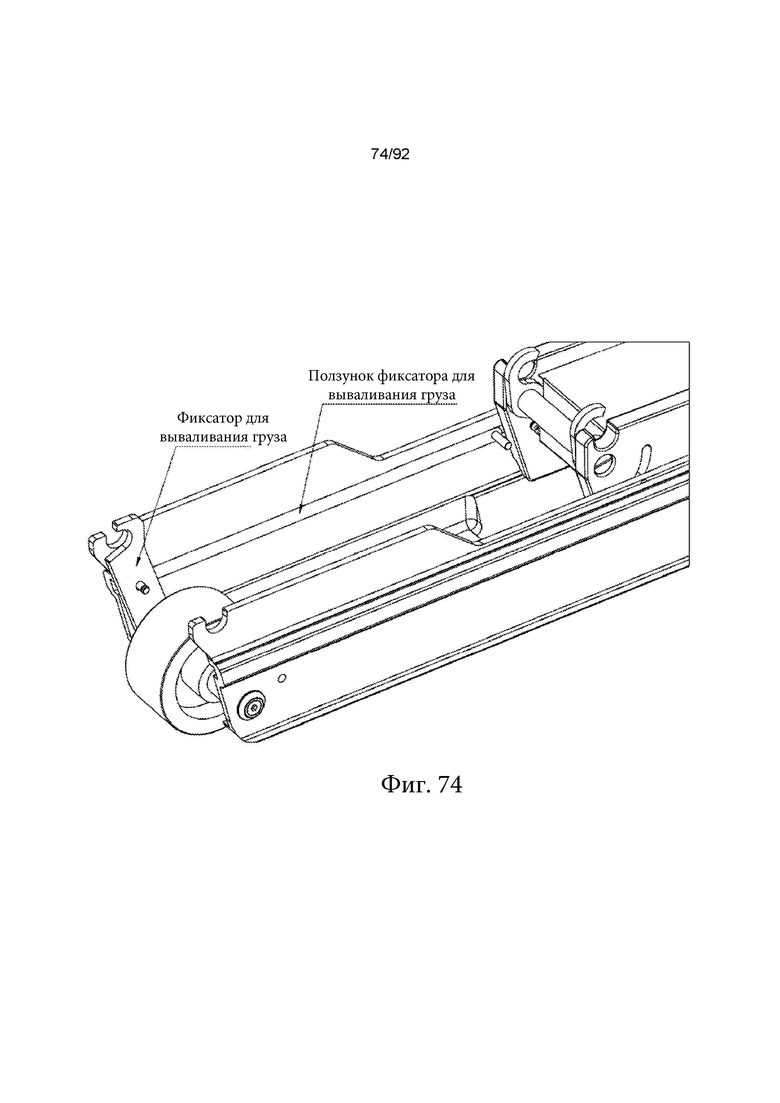
[0050] В верхней части задней наружной опоры установлен сдвижной фиксатор для вываливания груза, который взаимодействует с задней осью выдвижного механизма для удержания механического погрузчика от подпрыгивания при наклоне (в режиме вываливания груза) и при движении грузового автомобиля по неровной поверхности (Фиг. 74).
[0051] В направляющем рельсе установлен фиксатор из пружинной стали, который фиксирует направляющий рельс с верхней осью передней наружной опоры в режиме вываливания груза. Натяжения пружины достаточно для удержания направляющего рельса относительно подшипника верхней опоры при вываливании груза, но оно ослабевает, когда механический погрузчик поднимается вертикально вверх и опускается вниз (Фиг. 75).
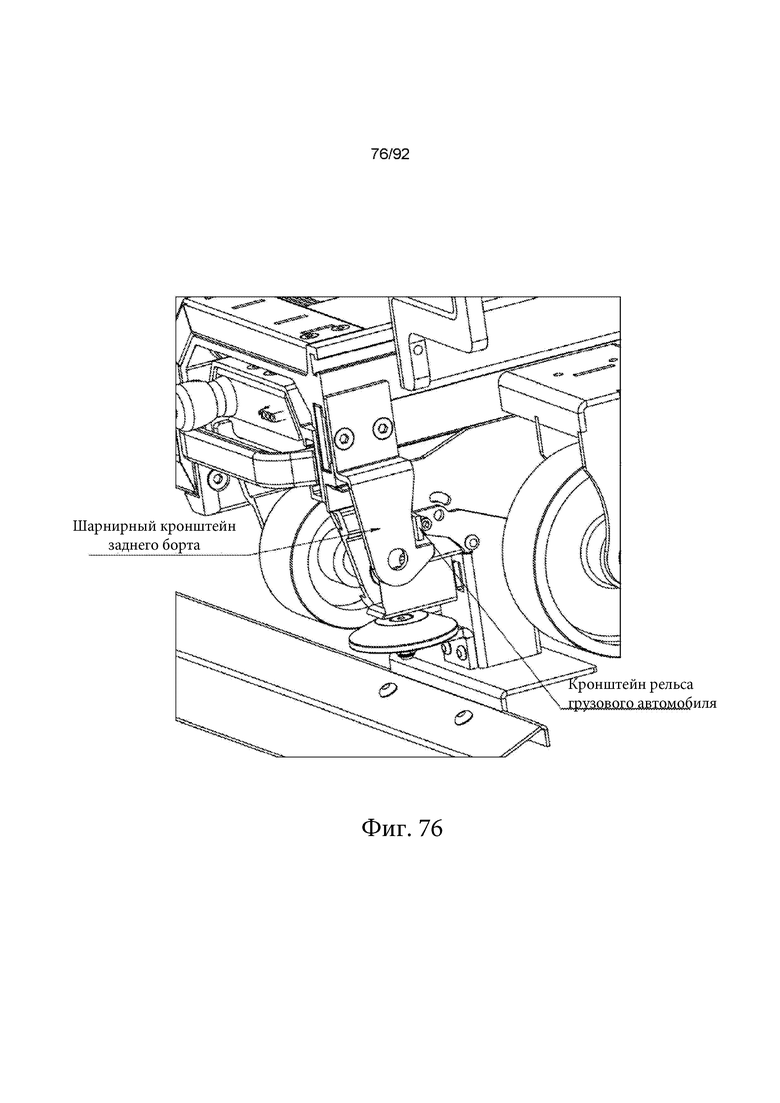
[0052] Чтобы удерживать грузовую платформу / грузовой контейнер при движении грузового автомобиля, пазы в шарнирном кронштейне заднего борта взаимодействуют со штифтами в рельсах грузового автомобиля (Фиг. 76).
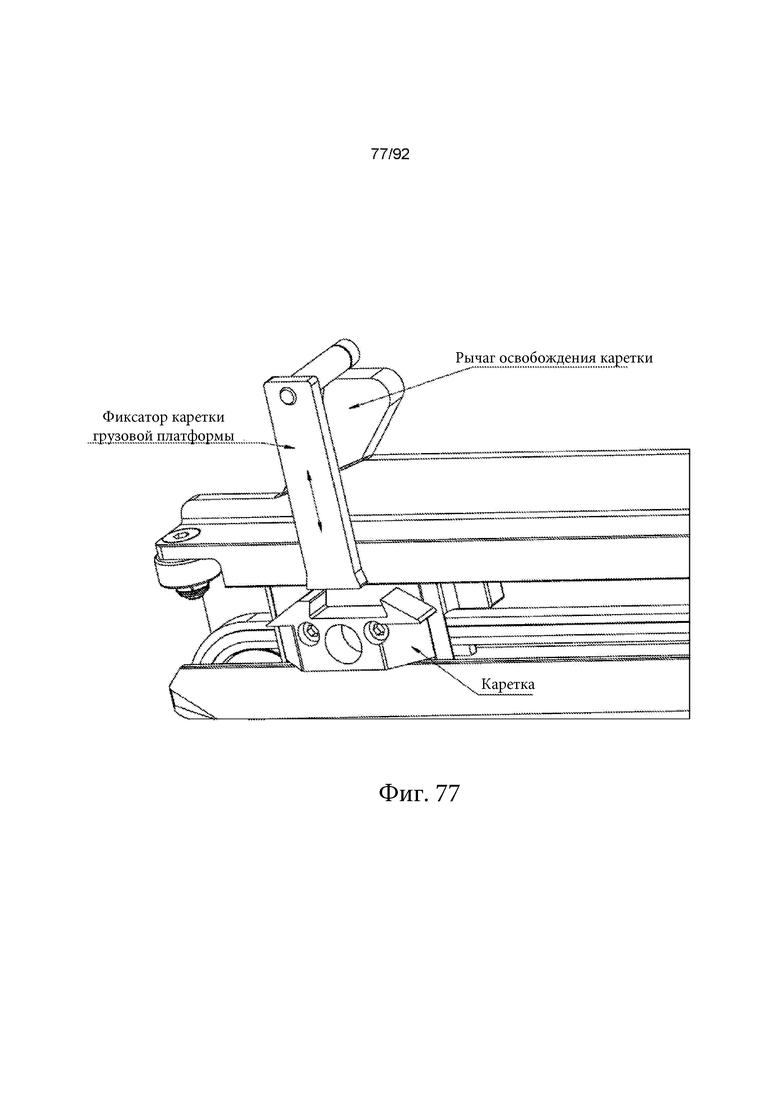
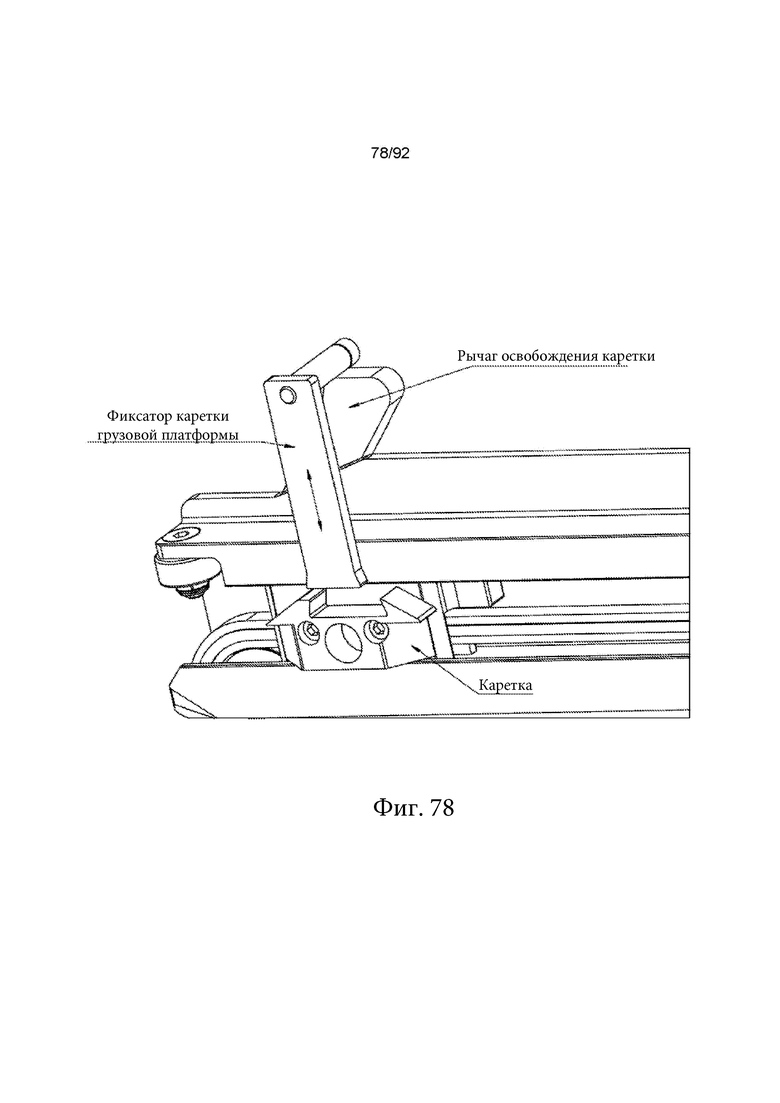
[0053] Рельсы грузового автомобиля имеют каретку, которая приводится в движение двигателем, и цепь для перемещения механического погрузчика или грузовой платформы / грузового контейнера в грузовой автомобиль. На обоих установлены фиксатор и механизм отсоединения каретки, так что они могут быть подключены к грузовому автомобилю независимо друг от друга (Фиг. 68, Фиг. 77 и Фиг. 78).
[0054] Выдвижной механизм (с пятым двигателем), который установлен в направляющем рельсе и соединен с механическим погрузчиком, может быть выборочно присоединен к направляющему рельсу и отсоединен от него. Для этого используется механизм, содержащий соленоид D (Фиг. 79).
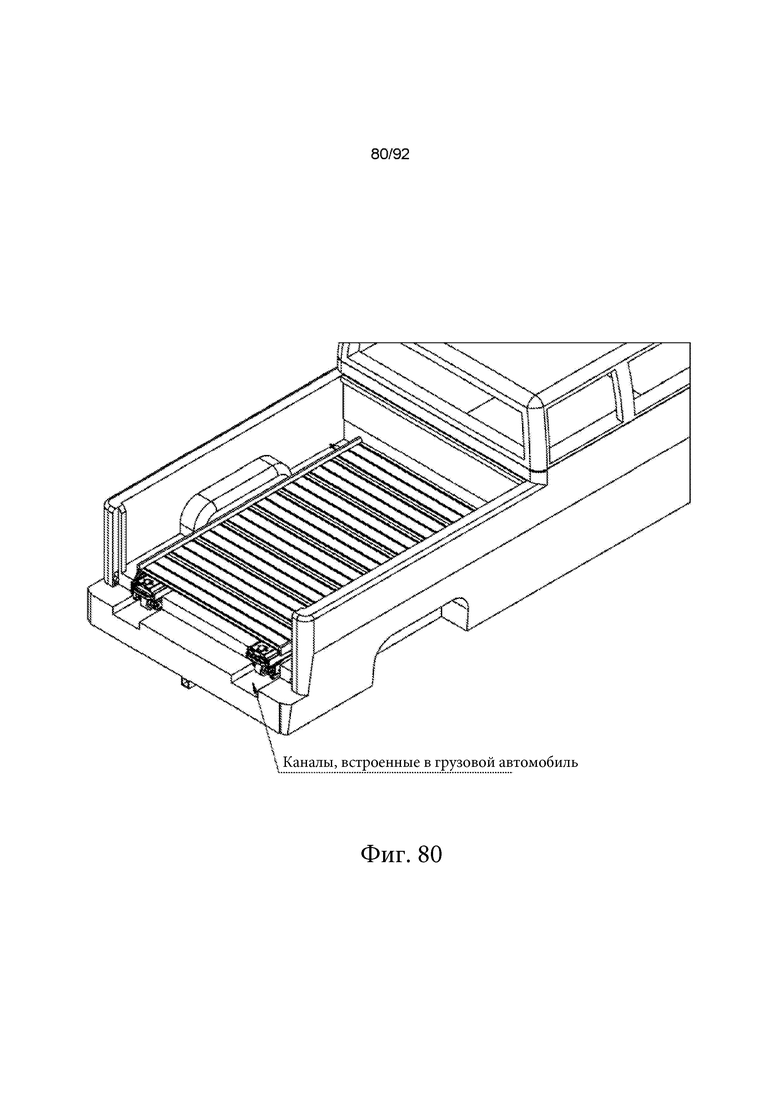
[0055] Производитель грузовых автомобилей малой грузоподъемности может выполнить грузовой автомобиль с каналами, встроенными в кузов грузового автомобиля, а не в рельсы грузовой платформы. При этом грузовая платформа будет плоской без боковых каналов. Может использоваться та же самая система механического погрузчика и электронные регуляторы.
[0056] Производитель грузовых автомобилей малой грузоподъемности может выполнить грузовой автомобиль с каналами, встроенными в кузов грузового автомобиля, а не в рельсы грузовой платформы. При этом грузовая платформа будет плоской без боковых каналов. Может использоваться та же самая система механического погрузчика и электронные регуляторы.
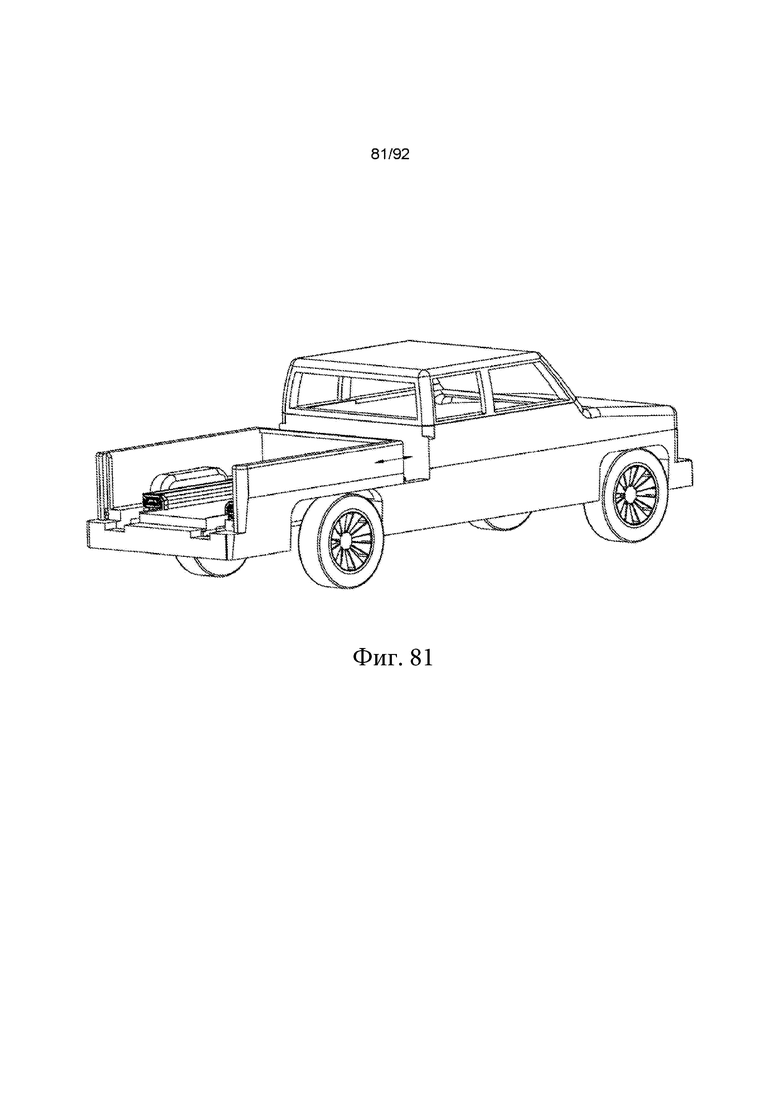
[0057] Производитель грузовых автомобилей малой грузоподъемности может выполнить грузовой автомобиль так, что весь кузов грузового автомобиля скатывается с рамы грузового автомобиля (Фиг. 80-81). Может использоваться та же самая система механического погрузчика и электронные регуляторы.
[0058] При использовании системы механического погрузчика, выполненной в соответствии с настоящим изобретением, груз находится в грузовой платформе / грузовом контейнере и, таким образом, никогда не контактирует с кузовом грузового автомобиля. Следовательно, производитель грузовых автомобилей малой грузоподъемности может производить грузовые автомобили без кузова или с достаточно упрощенным кузовом, выполненным из пластмассы, не допускающим попадания воды и грязи снизу с дороги. Это позволяет производителю как сэкономить деньги, так и уменьшить вес.
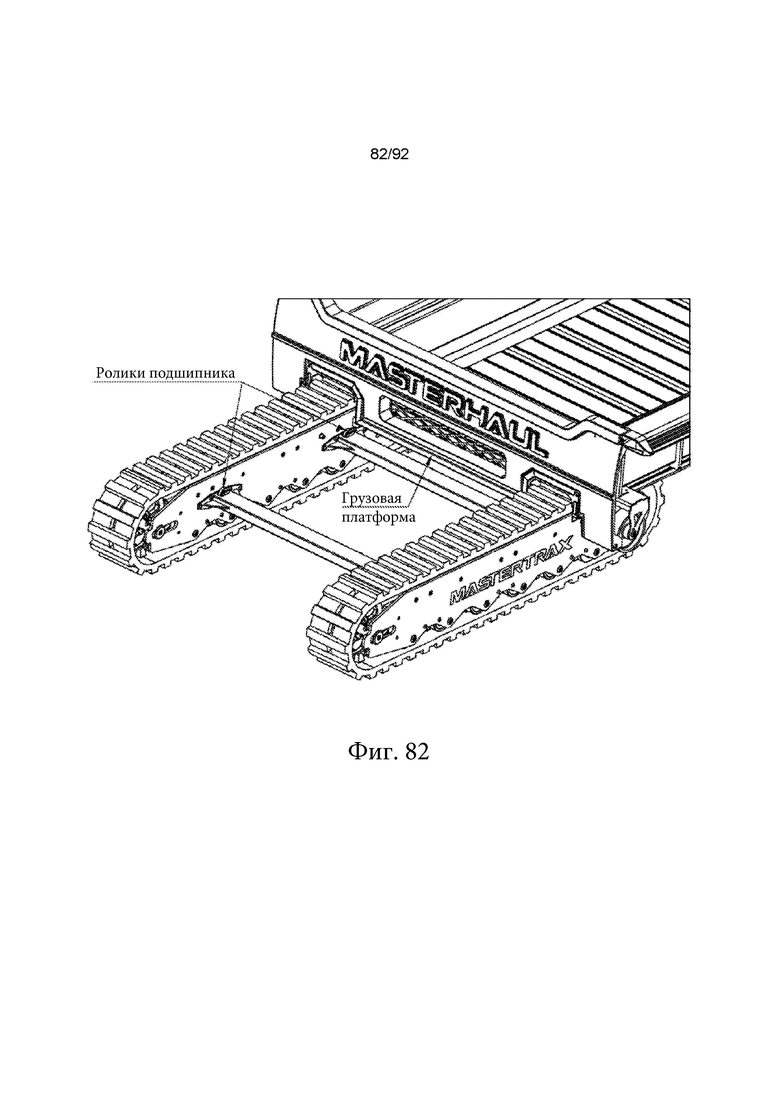
[0059] Для перемещения грузовой платформы / грузового контейнера по строительной площадке, имеющей слишком неровную поверхность для качения по ней обычных колес, может быть использовано специальное гусеничное устройство с резиновыми гусеницами. Такое устройство имеет шарикоподшипниковые ролики в поперечинах для закатывания грузовой платформы (Фиг. 82).
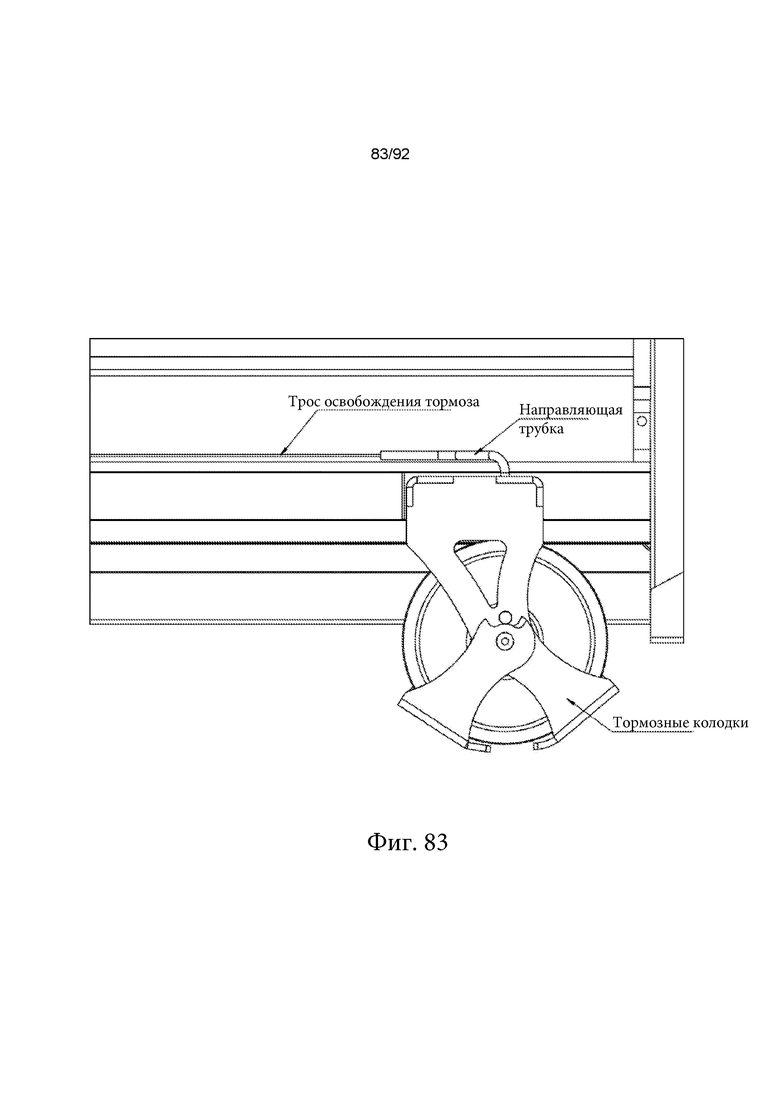
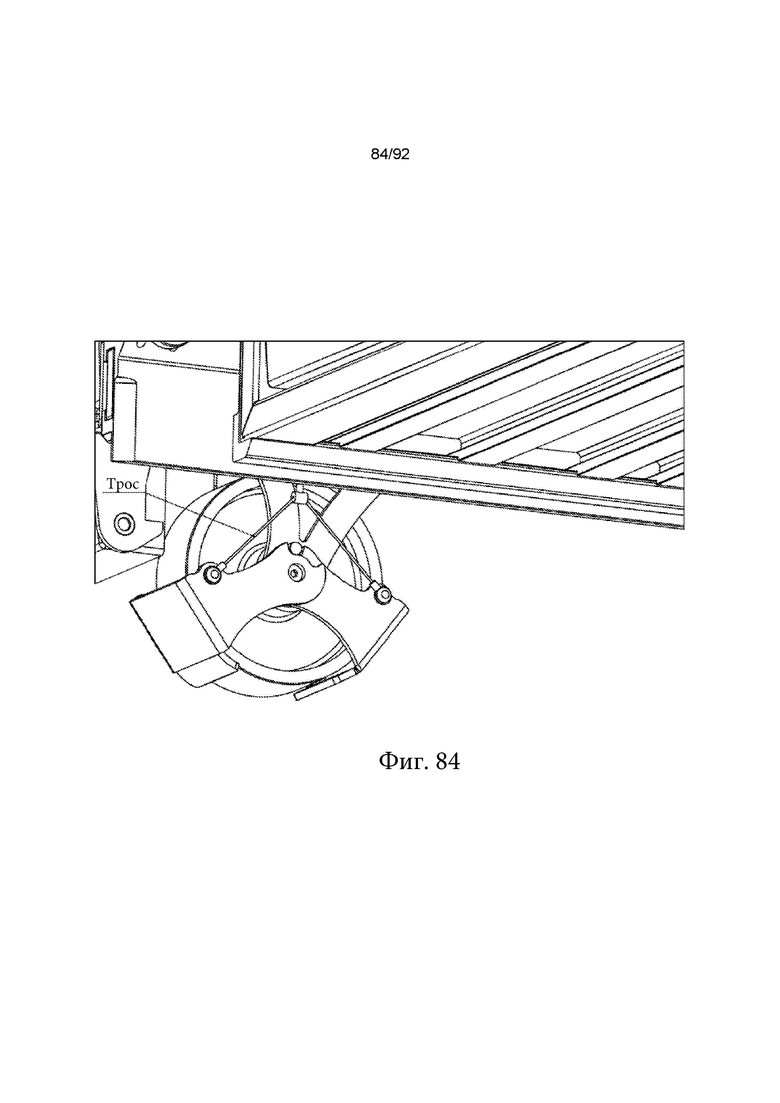
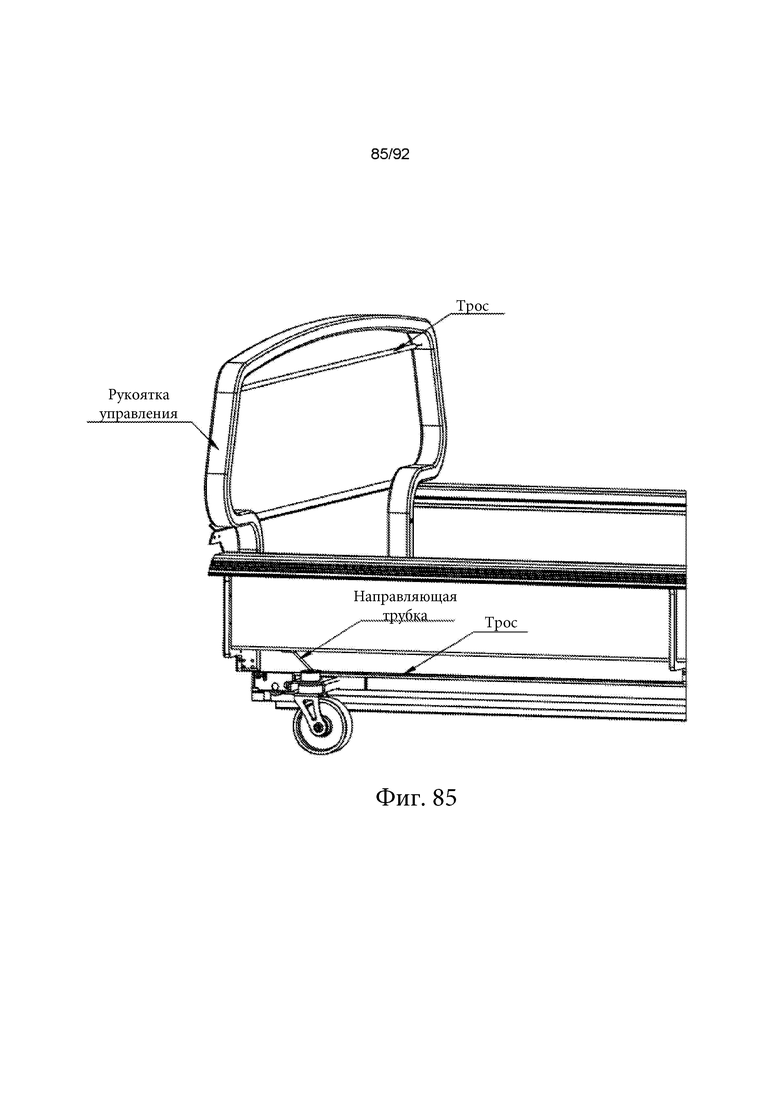
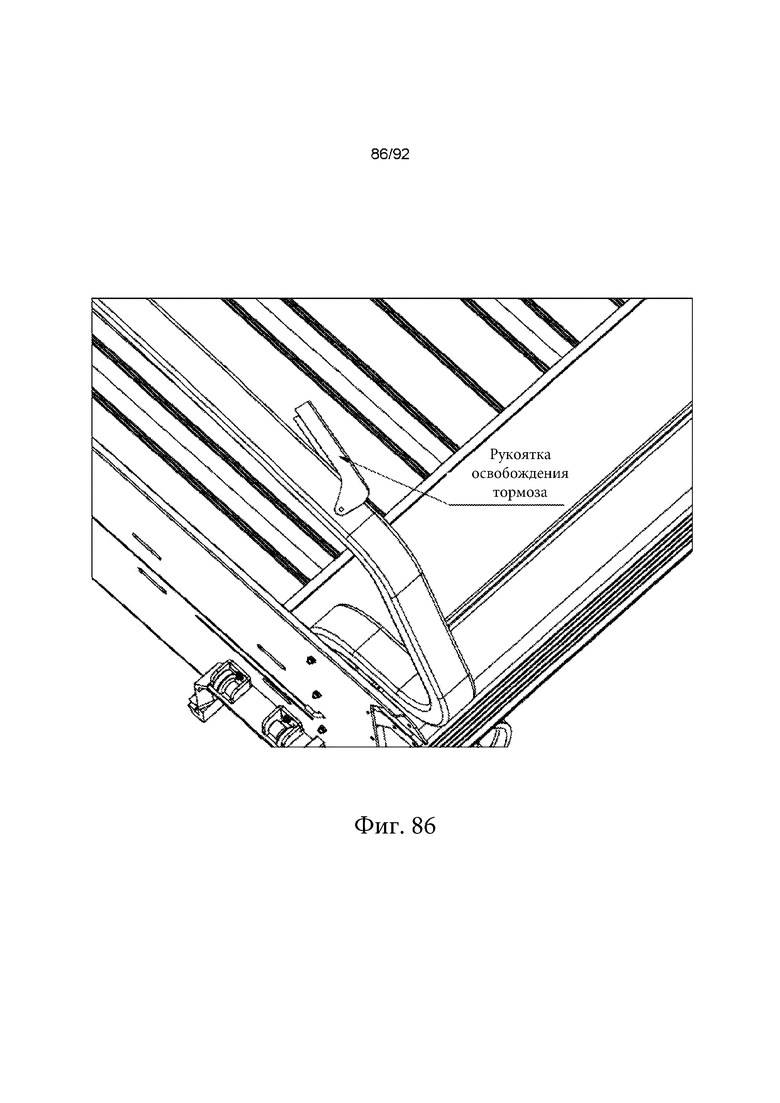
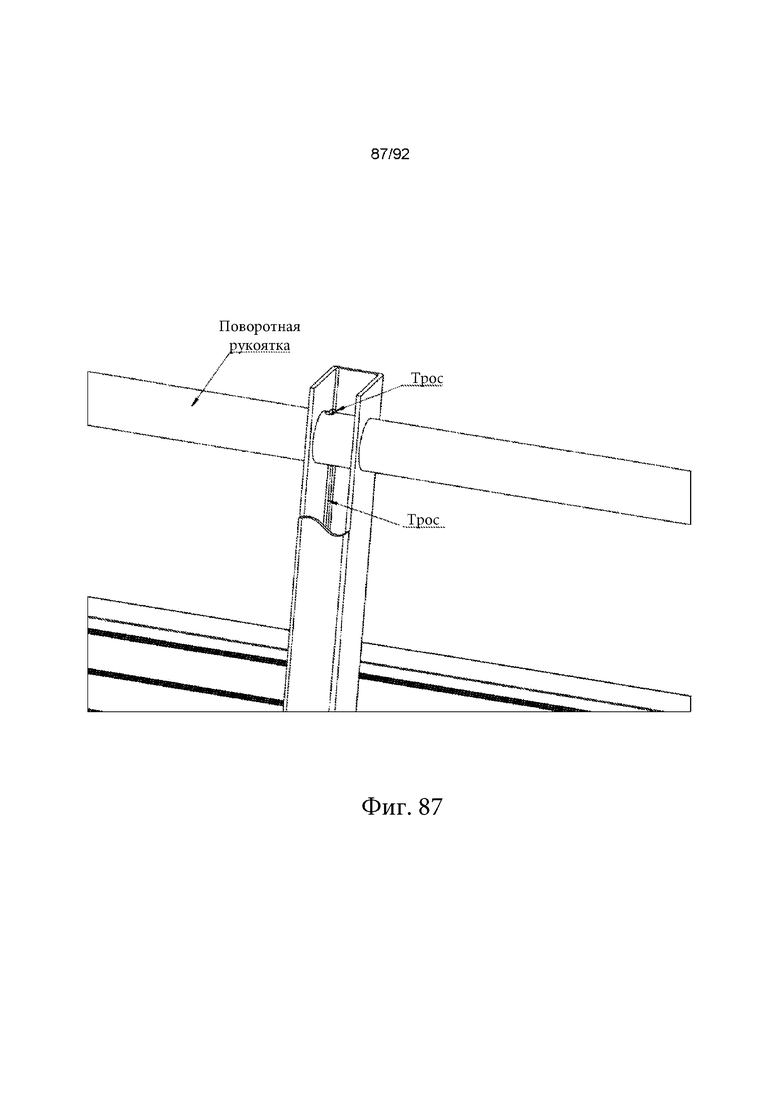
[0060] Когда грузовая платформа / грузовой контейнер катится по наклонной поверхности, необходима тормозная система, которая включается автоматически, чтобы препятствовать неуправляемому скатыванию под уклон грузовой платформы / грузового контейнера. Тормозные колодки установлены поверх задних колес (Фиг. 83). Задние колеса неподвижны и не скользят по дорожке 1С, как передние колеса. К тормозным колодкам присоединен трос, чтобы удерживать колодки вверху (расцепленными) при перемещении грузовой платформы / грузового контейнера (Фиг. 84). Этот трос освобождения тормоза проходит вдоль борта грузовой платформы в рукоятку управления (Фиг. 85). Оператор должен удерживать ее, подтягивая трос вверх (Фиг. 85) или используя рычажное устройство (Фиг. 86), или поворачивая поворотную рукоятку (Фиг. 87). Если оператор отпускает ее, тормоза включаются, т.е. используются автоматически.
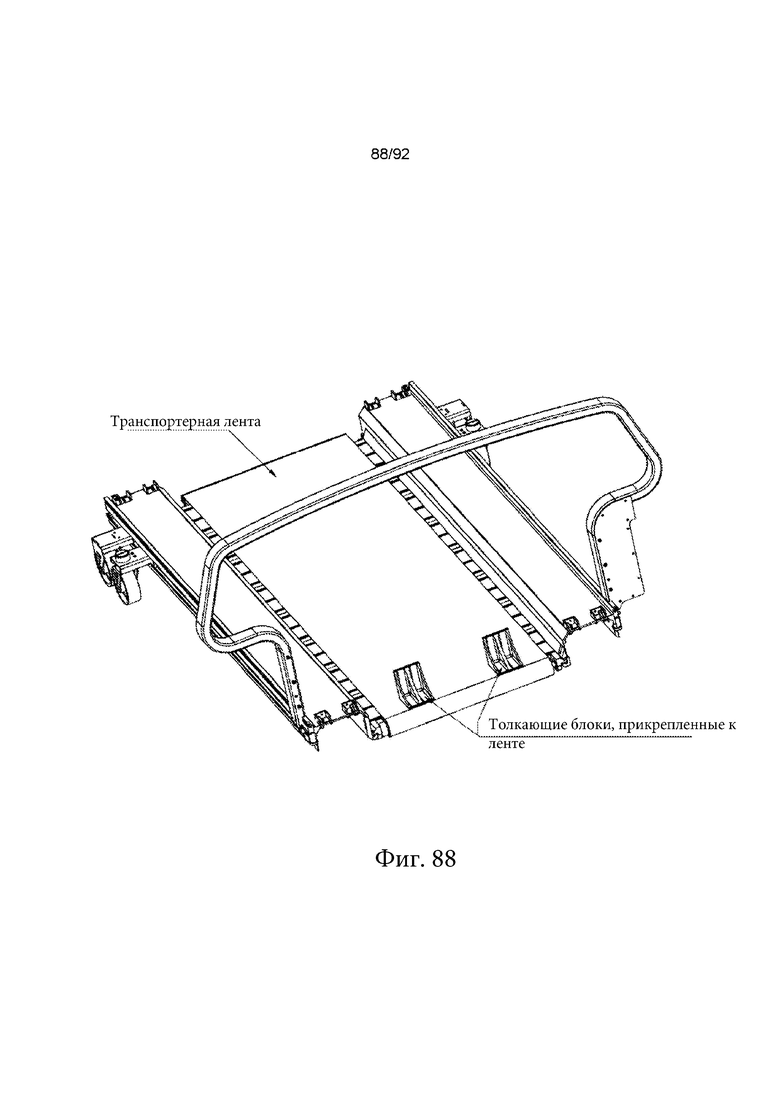
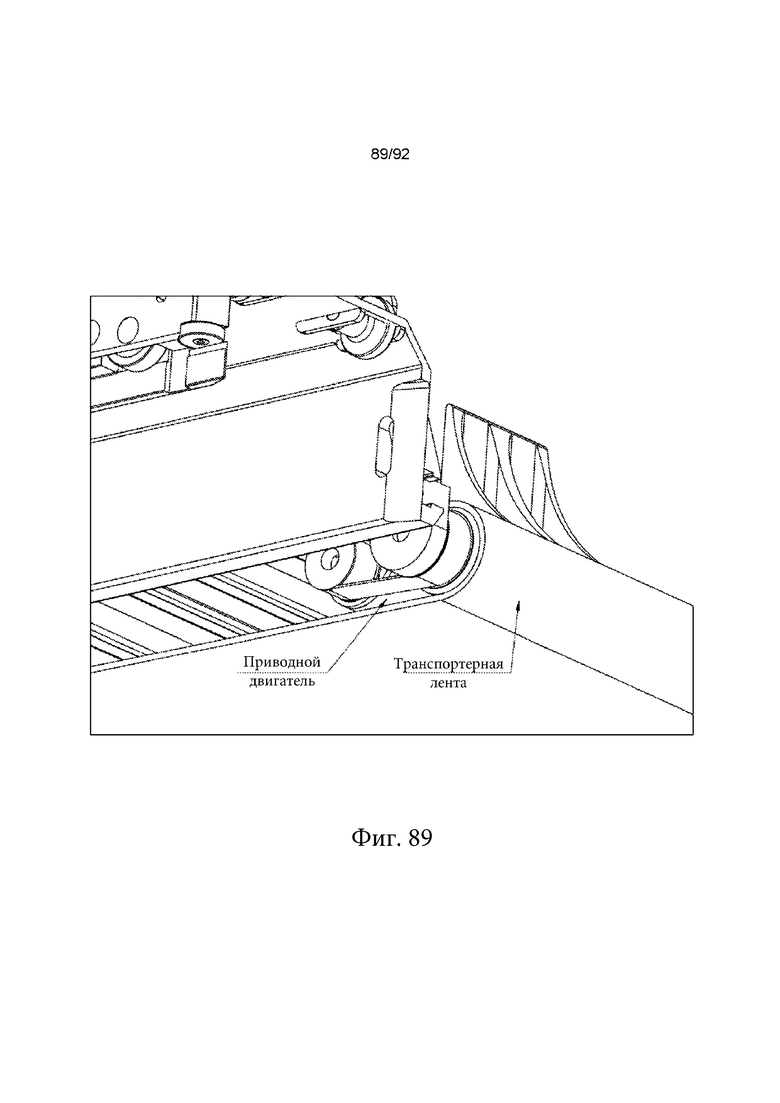
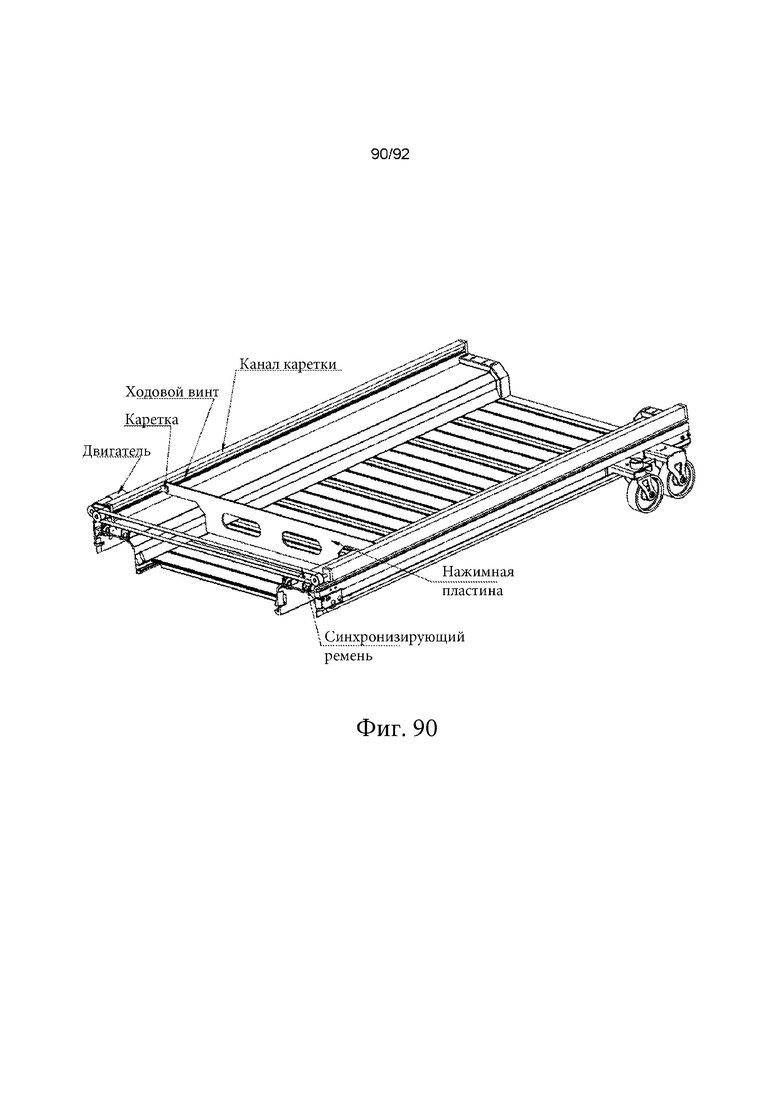
[0061] Вариант выполнения грузовой платформы для доставки упаковок содержит встроенную механическую транспортерную ленту для снятия с нее груза или упаковок (Фиг. 88). Транспортерная лента может иметь прикрепленные к ней толкающие блоки, которые обеспечивают выталкивание всех упаковок с грузовой платформы (Фиг. 88). Вид предпочтительной приводной системы двигателя показан на Фиг. 89. В качестве альтернативы транспортерной ленте, нажимная пластина может перемещаться по каналам с каждой стороны грузовой платформы и приводится в действие двигателем для сталкивания упаковок с грузовой платформы (Фиг. 90).
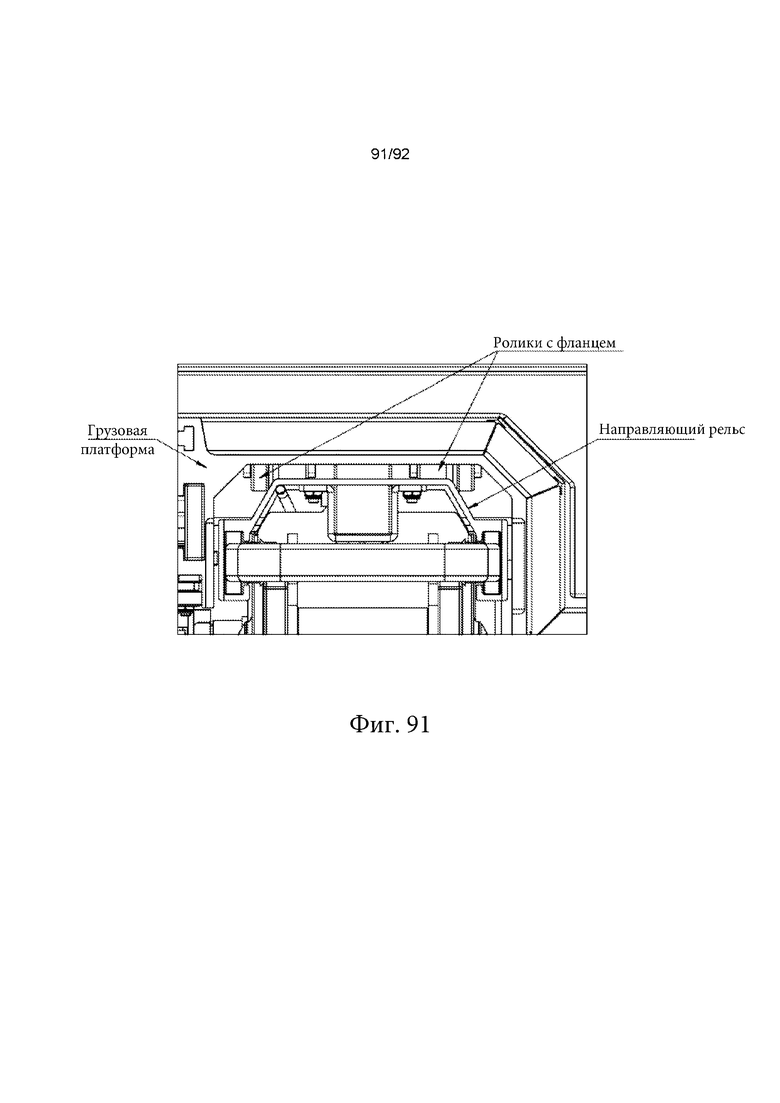
[0062] Для качения по направляющему рельсу под своим каналом грузовая платформа / грузовой контейнер содержит ролики. Эти ролики с одной стороны имеют фланец, так что два ролика охватывают выступающую часть на направляющем рельсе. Это удерживает грузовую платформу по центру над направляющим рельсом, направляя ее в рельсы грузового автомобиля (Фиг. 91).
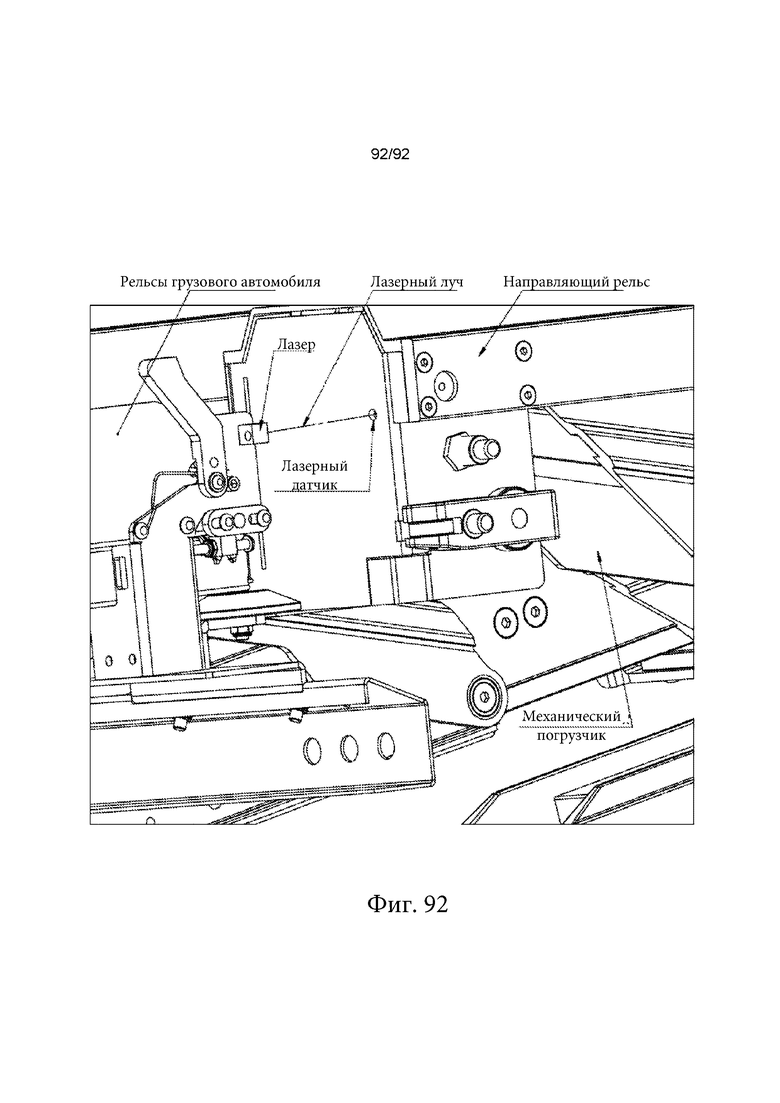
[0063] На Фиг. 92 показан измерительный узел, функционально установленный на направляющих рельсах для отслеживания положения первого направляющего рельса относительно второго направляющего рельса. Измерительный узел соединен с первым и вторым двигателями для удерживания направляющих рельсов на одинаковой высоте относительно друг друга. В одном варианте выполнения измерительный узел представляет собой оптический датчик (например, лазерный передатчик и лазерный приемник), хотя можно использовать датчики другого типа. Положение направляющих рельсов относительно рельсов грузового автомобиля также можно отслеживать / измерять с помощью измерительного узла (предпочтительно разместив передатчик на одном рельсе / кузове грузового автомобиля или на направляющих рельсах, а приемник - на других направляющих рельсах или на рельсе / кузове грузового автомобиля).
[0064] В приведенном описании для раскрытия сущности изобретения использованы примеры, в том числе наилучший вариант выполнения, которые также дают возможность специалисту изготовить и использовать изобретение. Другие примеры, которые встречаются специалистам, находятся в пределах объема изобретения, если они имеют конструктивные элементы, которые не отличаются от того же принципа или если они включают равноценные конструктивные элементы, имеющие незначительные отличия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Складная эстакада для погрузки-разгрузки вагонов и фургонов | 2018 |
|
RU2691485C1 |
| Погрузочная станция для автоматической загрузки и разгрузки грузовых автомобилей, прицепов или контейнеров с палеттами с хвостовой стороны | 1989 |
|
SU1830042A3 |
| Самопогрузчик | 1980 |
|
SU865205A1 |
| Транспортная система | 1989 |
|
SU1782809A1 |
| ТРАНСПОРТНО-СТЫКОВОЧНЫЙ АГРЕГАТ | 2007 |
|
RU2350493C1 |
| Платформа для погрузки-разгрузки транспортных средств автопогрузчиком | 1981 |
|
SU1020334A1 |
| ГРУЗОВОЙ АВТОМОБИЛЬ С МНОГООСНЫМ ШАССИ ДЛЯ ТРАНСПОРТИРОВКИ, СНЯТИЯ И ПРИЕМА ШТУЧНЫХ ГРУЗОВ | 2012 |
|
RU2644215C2 |
| ПОГРУЗОЧНАЯ СИСТЕМА | 2018 |
|
RU2729154C1 |
| Грузовой вагон | 1986 |
|
SU1316887A1 |
| Транспортное средство с погрузочно-разгрузочным устройством | 1990 |
|
SU1787831A1 |
Изобретение относится к устройству для погрузки и выгрузки грузов. Система погрузки и разгрузки для связанной с ней платформы грузового автомобиля содержит первый и второй рельсы грузового автомобиля, узел механического погрузчика, первый и второй двигатели, измерительный узел. Рельсы отстоят друг от друга в поперечном направлении и выполнены с возможностью размещения в связанном с ними кузове грузового автомобиля. Узел механического погрузчика содержит первый и второй опорные узлы. Опорные узлы содержат, соответственно, первый и второй направляющие рельсы. Направляющие рельсы функционально взаимодействуют, соответственно, с первым и вторым рельсами грузового автомобиля. Первый и второй двигатели расположены, соответственно, в первом и втором опорных узлах и выполнены с возможностью выборочного подъема и опускания первого и второго направляющих рельсов. Измерительный узел функционально установлен на направляющих рельсах, для отслеживания положения первого направляющего рельса относительно второго направляющего рельса. Измерительный узел функционально соединен с первым и вторым двигателями для удерживания направляющих рельсов на одинаковой высоте друг относительно друга. Достигается упрощение погружения в кузов грузового автомобиля или выгружения из кузова грузов. 28 з.п. ф-лы, 93 ил.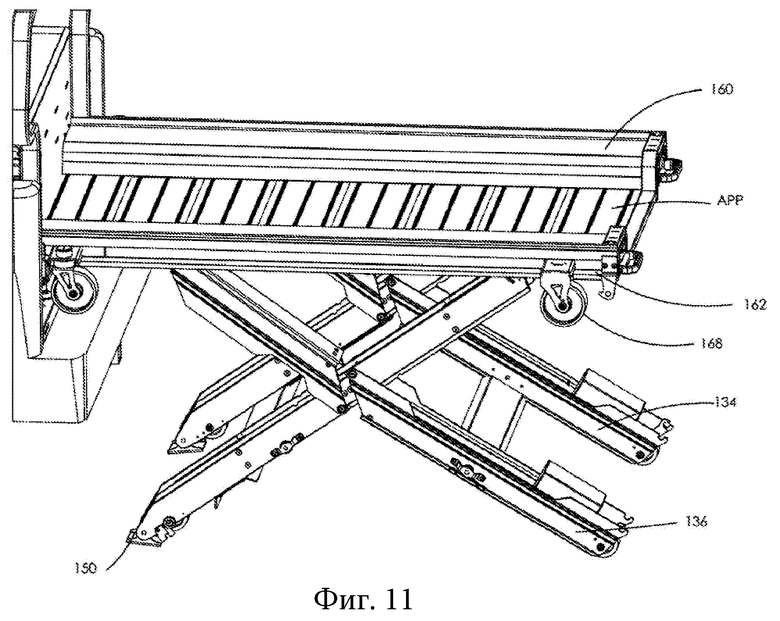
1. Система погрузки/разгрузки для связанной с ней платформы грузового автомобиля, содержащая:
первый и второй рельсы грузового автомобиля, отстоящие друг от друга в поперечном направлении и выполненные с возможностью размещения в связанном с ними кузове грузового автомобиля, и
узел механического погрузчика, содержащий (i) первый и второй опорные узлы, которые содержат, соответственно, (ii) первый и второй направляющие рельсы, которые функционально взаимодействуют, соответственно, с первым и вторым рельсами грузового автомобиля, (iii) первый и второй двигатели, расположенные, соответственно, в первом и втором опорных узлах и выполненные с возможностью выборочного подъема и опускания первого и второго направляющих рельсов, и (iv) измерительный узел, функционально установленный на направляющих рельсах, для отслеживания положения первого направляющего рельса относительно второго направляющего рельса, при этом измерительный узел функционально соединен с первым и вторым двигателями для удерживания направляющих рельсов на одинаковой высоте друг относительно друга.
2. Система по п. 1, дополнительно содержащая центрирующий узел, который отслеживает положение узла механического погрузчика относительно связанного с ним кузова грузового автомобиля.
3. Система по п. 2, в которой центрирующий узел содержит оптический передатчик и приемник.
4. Система по п. 1, в которой передатчик расположен по меньшей мере на одном из следующих элементов: (i) на узле механического погрузчика и (ii) на связанном с узлом кузове или рельсах грузового автомобиля, а приемник расположен на другом из этих же элементов: (ii) на связанном с узлом кузове или рельсах грузового автомобиля, (i) на узле механического погрузчика.
5. Система по п. 4, в которой первый и второй рельсы грузового автомобиля, установленные в кузове грузового автомобиля, выполнены с возможностью вставления в них скольжением, соответственно, первого и второго направляющих рельсов.
6. Система по п. 5, дополнительно содержащая по меньшей мере один передаточный двигатель, который выборочно перемещает скольжением первый и второй направляющие рельсы относительно кузова грузового автомобиля.
7. Система по п. 5, в которой первый и второй направляющие рельсы и первый и второй рельсы грузового автомобиля представляют собой экструдированные профили, выполненные таким образом, что обеспечивается соединение скольжением первого и второго направляющих рельсов, соответственно, с первым и вторым рельсами грузового автомобиля.
8. Система по п. 3, в которой измерительный узел и центрирующий узел являются беспроводными.
9. Система по п. 8, дополнительно содержащая первую аккумуляторную батарею, установленную в первом опорном узле, и вторую аккумуляторную батарею, установленную во втором опорном узле.
10. Система по п. 1, дополнительно содержащая третий и четвертый двигатели, при этом каждый из первого и второго опорных узлов содержит первую и вторую части, при этом первая часть первого опорного узла имеет размеры, обеспечивающие возможность размещения первого двигателя, вторая часть первого опорного узла имеет размеры, обеспечивающие возможность размещения второго двигателя, первая часть второго опорного узла имеет размеры, обеспечивающие возможность размещения третьего двигателя, и вторая часть второго опорного узла имеет размеры, обеспечивающие возможность размещения четвертого двигателя.
11. Система по п. 1, дополнительно содержащая первый и второй рельсы грузового автомобиля, которые установлены в кузове грузового автомобиля и взаимодействуют и с возможностью скольжения принимают, соответственно, первый и второй направляющие рельсы, и
двигатель для погрузки/разгрузки, который расположен в каждом из рельсов грузового автомобиля и обеспечивает погрузку и разгрузку механического погрузчика из кузова грузового автомобиля.
12. Система по п. 11, дополнительно содержащая первый удерживающий механизм, который временно препятствует скольжению первого и второго направляющих рельсов относительно, соответственно, первого и второго рельсов грузового автомобиля.
13. Система по п. 1, в которой каждый опорный узел содержит опорный башмак и первый и второй отстоящие друг от друга ролики, причем опорный башмак каждого опорного узла шарнирно прикреплен к соответствующему опорному узлу, при этом опорный башмак каждой опоры взаимодействует с горизонтальной поверхностью еще до того, как первый ролик войдет во взаимодействие с горизонтальной поверхностью.
14. Система по п. 1, дополнительно содержащая по меньшей мере один двигатель для возвратно-поступательного перемещения контейнера относительно рельсов грузового автомобиля для погрузки/разгрузки контейнера, и двигатель, который расположен в частях передних опор и выборочно наклоняет контейнер относительно рельсов грузового автомобиля, в результате чего система используется для вываливания груза.
15. Система по п. 14, в которой объединенный двигатель для погрузки/разгрузки выполнен с возможностью возвратно-поступательного перемещения контейнера относительно кузова грузового автомобиля независимо от наклона контейнера.
16. Система по п. 1, дополнительно содержащая либо контейнер, либо грузовую платформу, имеющую первый и второй рельсы, которые с возможностью скольжения взаимодействуют с рельсами грузового автомобиля, и двигатель, который выборочно перемещает контейнер или грузовую платформу относительно рельсов грузового автомобиля.
17. Система по п. 16, в которой первый и второй рельсы выборочно и с возможностью скольжения взаимодействуют, соответственно, с первым и вторым направляющими рельсами.
18. Система по п. 17, дополнительно содержащая второй запирающий механизм, который выборочно препятствует скольжению контейнера или грузовой платформы относительно первого и второго направляющих рельсов.
19. Система по п. 18, дополнительно содержащая третий фиксирующий механизм, который выборочно препятствует скольжению контейнера или грузовой платформы относительно кузова грузового автомобиля.
20. Система по п. 16, дополнительно содержащая ролики, установленные на грузовой платформе.
21. Система по п. 20, в которой рельсы грузового автомобиля имеют размеры, обеспечивающие возможность приема роликов.
22. Система по п. 21, в которой ролики установлены с возможностью ограниченного скользящего перемещения относительно грузовой платформы при загрузке грузовой платформы.
23. Система по п. 22, дополнительно содержащая фиксатор, обеспечивающий взаимодействие соответствующего ролика с соответствующим первым или вторым рельсом грузовой платформы, когда грузовая платформа отделена от узла механического погрузчика.
24. Система по п. 16, в которой грузовая платформа содержит подвижную транспортерную ленту, способствующую погрузке груза на грузовую платформу / разгрузке груза с грузовой платформы.
25. Система по п. 24, дополнительно содержащая приводной двигатель, выполненный с возможностью перемещения транспортерной ленты.
26. Система по п. 25, дополнительно содержащая одно из следующего: (i) толкающий блок, прикрепленный к транспортерной ленте, или (ii) толкающий стержень, приводимый в действие приводным двигателем и выполненный с возможностью перемещения относительно грузовой платформы для выталкивания груза с транспортерной ленты.
27. Система по п. 16, дополнительно содержащая механизированное гусеничное устройство, имеющее первую и вторую непрерывные гусеницы, при этом механический погрузчик разгружает контейнер или грузовую платформу на гусеничное устройство.
28. Система по п. 27, дополнительно содержащая первую и вторую поперечины, проходящие между гусеницами, и поверхности для роликов, выполненные на поперечинах, чтобы способствовать погрузке грузовой платформы на гусеничное устройство и ее разгрузке с гусеничного устройства.
29. Система по п. 1, в которой первый и второй направляющие рельсы установлены с возможностью перемещения относительно, соответственно, первого и второго опорных узлов при погрузке узла механического погрузчика в кузов грузового автомобиля и разгрузке узла механического погрузчика из кузова грузового автомобиля.
| US 2015003944 A1, 01.01.2015 | |||
| US 2016367416 A1, 22.12.2016 | |||
| US 3768673 А, 30.10.1973 | |||
| US 2016159264 A1, 09.06.2016 | |||
| US 2016287454 A1, 06.10.2016 | |||
| ГРУЗОВОЙ АВТОМОБИЛЬ С МНОГООСНЫМ ШАССИ ДЛЯ ТРАНСПОРТИРОВКИ, СНЯТИЯ И ПРИЕМА ШТУЧНЫХ ГРУЗОВ | 2012 |
|
RU2644215C2 |

