Изобретение относится к транспортным средствам для транспортировки, самоходным транспортным средствам и может быть использовано как самостоятельный модуль для различных типов транспорта, в том числе беспилотном.
Уровень техники.
Из уровня техники известно система и способ управления транспортным средством (EA 031441 опубл. 06.11.2018). Система управления транспортным средством включает в себя блок управления, выполненный с возможностью электрического подключения к системе привода транспортного средства. Система привода содержит по меньшей мере один тяговый двигатель для создания движущей силы для транспортного средства. Блок управления выполнен с возможностью управлять выходным крутящим моментом тягового двигателя для удержания нулевой или околонулевой скорости транспортного средства на склоне, не располагая информацией, по меньшей мере в одном режиме работы, об уклоне и/или нагрузке транспортного средства и без активации рабочего тормоза транспортного средства.
Так же известна роботизированная транспортная платформа (RU2506157 опубл. 06.11.2012). Изобретение относится к военной и специальной технике, а именно к робототехническим комплексам, предназначенным для дистанционной работы в условиях боевых действий, а также в труднодоступных и опасных для присутствия человека местах. Технический результат - сбор и передача разведывательной информации, охрана или патрулирование гражданских и военных объектов, проведение антитеррористических операций в городских и полевых условиях, ведение стрельбы по различным видам целей в дневных и ночных условиях. В качестве самоходного управляемого транспортного средства использован колесный движитель повышенной проходимости с приводом от двигателя внутреннего сгорания. Комплект функционального оборудования выполнен в виде боевого модуля для ведения стрельбы по различным видам целей в дневных и ночных условиях, содержащего поворотную платформу с системой наведения, блок управления и средство огневого поражения. Линейные электродвигатели системы управления движением платформы электрически связаны с сервоусилителями и механически - с правым и левым рулевыми механизмами, коробкой переключения передач. Платформа оснащена системой топопривязки и навигацией, информационно-вычислительной системой, состоящей из двух бортовых компьютеров, аппаратурой для обеспечения резервной связи по каналам системы связи и передачи данных.
Из уровня техники известен патент на транспортное средство (RU2754021 опубл. 25.08.2021) в котором описывается комплект автономного вождения, выполненный с возможностью установки на транспортное средство и снятия с транспортного средства, причем упомянутый комплект автономного вождения выдает команду автономного вождения, платформу транспортного средства, содержащую несколько функциональных блоков, выполняющих несколько заданных функций транспортного средства и интерфейсный блок управления транспортным средством, осуществляющий взаимодействие с комплектом автономного вождения и выдающий команду управления на функциональные блоки в соответствии с командой от комплекта автономного вождения, причем один из функциональных блоков представляет собой систему рулевого управления, осуществляющую рулевое управление транспортным средством, причем упомянутая система рулевого управления задает предельное значение угловой скорости поворота рулевого колеса в соответствии с заданным опорным значением и передает заданное предельное значение в комплект автономного вождения через интерфейсный блок управления транспортным средством, причем упомянутый комплект автономного вождения рассчитывает целевой угол поворота рулевого колеса, удовлетворяющий предельному значению, полученному от системы рулевого управления, и передает команду с вычисленным углом поворота рулевого колеса в систему рулевого управления через интерфейсный блок управления транспортным средством. Основным недостатком данного решения являются его габариты и вследствие чего, отсутствия универсальности использования и сложности монтажа/демонтажа на транспортное средство.
Из уровня техники известно модульное транспортное средство (EP3797051 опубл. 31.03.2021), содержит кабину водителя и погрузочную платформу, содержащую подвижные жесткие панели. Оно имеет две конфигурации, а именно конфигурацию "транспортирующих грузов" и конфигурацию " транспортирования людей". Транспортное средство также может принимать промежуточные конфигурации. В конфигурации "транспортировка груза" погрузочная платформа представляет собой плоскую поверхность, занимающую над половиной верхней поверхности транспортного средства, а водительское отделение расположено под грузовой платформой и недоступно водителю. В конфигурации "транспортирующих людей" жесткие панели могут быть перемещены по отношению к конфигурации "транспортирующие товары", а водитель может быть доступен и использован водителем. Сиденья для пассажиров также выполнены с возможностью освобождения и использования путем перемещения указанных жестких панелей. Модульное транспортное средство, содержащее приводную станцию, оборудованную сиденьем и погрузочной платформой и имеющую по меньшей мере две конфигурации, а именно первую конфигурацию, в которой транспортное средство предназначено для использования без водителя, и вторую конфигурацию, в которой транспортное средство предназначено для использования с водителем, причем указанное транспортное средство отличается тем, что: погрузочная платформа содержит несколько подвижных частей, содержащих шарнирные элементы для шарнирного крепления подвижных частей на транспортном средстве и/или на соседней подвижной части; в первой конфигурации транспортного средства подвижные части расположены в горизонтальном положении по меньшей мере с одной подвижной частью, охватывающей недоступную приводную станцию, и погрузочная платформа, по меньшей мере частично образованная подвижными частями, представляет собой плоскую поверхность, которая занимает более половины верхней грани транспортного средства; и во второй конфигурации транспортного средства по меньшей мере одна подвижная часть загрузочной плиты развернута вверх для освобождения доступа к приводной станции, которая доступна и применима для водителя.
Недостатками данных технических решений являются низка универсальность, сложность монтажа данных средств и модулей, а также относительно большие габариты, что усложняет проведение плановых ремонтных работ или замены элементов.
Раскрытие изобретения.
Задача, на решение которой направлено заявляемое изобретение, заключается в создании унифицированного, универсального и простого в использовании устройства для управления транспортными средствами в ручном или беспилотном режимах.
Технический результат заявляемого технического решения заключается в повышении скорости монтажа/демонтажа оборудования транспортного средства, повышение надежности работы оборудования, упрощение проведения ремонта, зарядки и обслуживания оборудования.
Адаптивный энерго-интеллектуальный модуль (АЭИМ) для управления транспортными средствами, представляет собой единый корпус, выполненный из композиционного материала, который включает в себя источник питания, бортовой компьютер, управляющий, в том числе, движителями, по меньшей мере один блок контроля напряжения, по меньшей мере один блок управления двигателями, по меньшей мере один блок управления сервоприводами, блок позиционирования устройства, блок управления заряда источника питания, модуль управления освещением, модуль удаленной связи, при этом упомянутый выше корпус имеет разъемы для подключения внешних устройств для функционирования транспортного средства, при этом упомянутый бортовой компьютер использует нейросеть для управления транспортным средством, а также данные, получаемые с подключенных внешних устройств, при этом материал, из которого выполнен упомянутый выше корпус имеет плотность не менее 2,50 г/см.
В частном случае, корпус энерго-интеллектуального модуля состоит из композиционного материала с плотностью не менее 2000 кг/м.
В частном случае, движители представляют собой, как колесный, гусеничный, винтовой или реактивный.
В частном случае, адаптивный энерго-интеллектуальный модуль включает в себя управление транспортным средством в автономном режиме, дистанционном или используя ручное управление.
В частном случае адаптивный энерго-интеллектуальный модуль используется как несущим модулем, закрепленным на раме, так и не быть несущим модулем.
В частном случае модуль удаленной связи встроен в бортовой компьютер.
В частном случае адаптивный энерго-интеллектуальный модуль содержит защитный корпус с возможностью размещения в нем защитных материалов.
Изобретение поясняется чертежами:
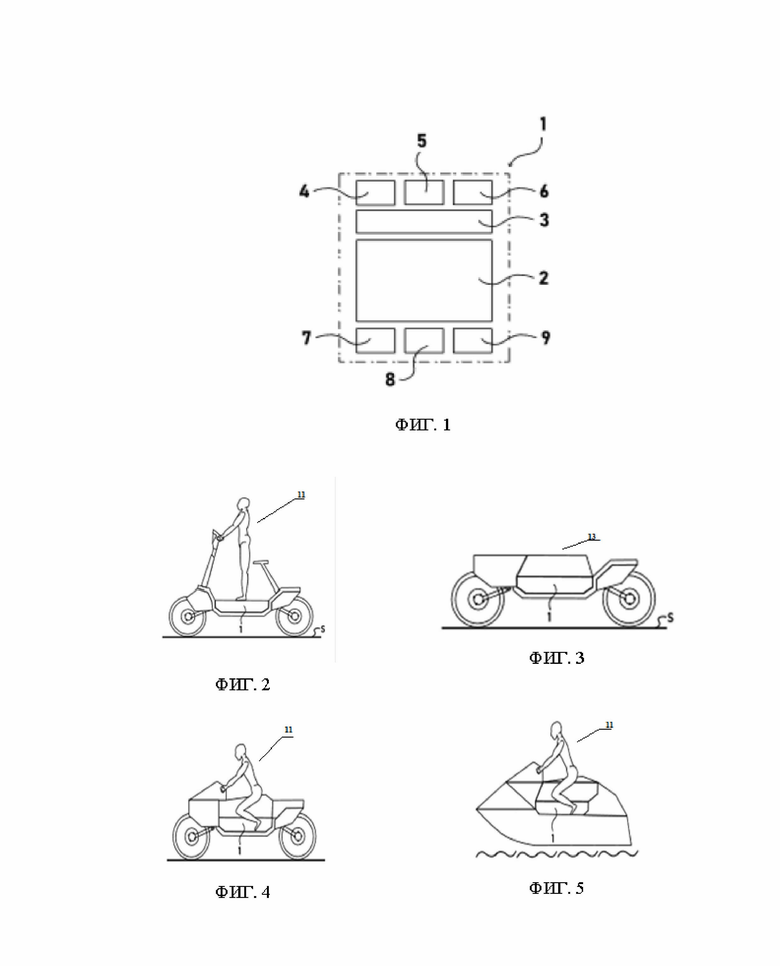
Фиг. 1 - Схема адаптивного энерго-интеллектуального модуля;
Фиг. 2, 3, 4, 5, 6 - Изображение различных типов транспортных средств, в которых может применяться АЭИМ;
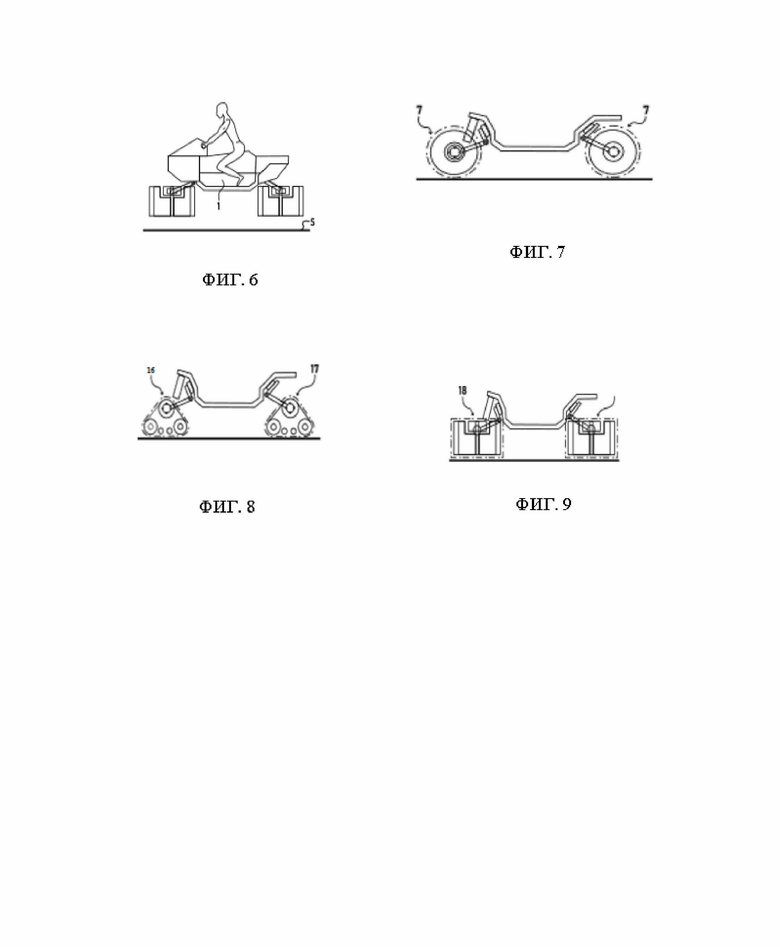
Фиг. 7, 8, 9 - Изображение различных типов движителей транспортных средств, в которых может применяться АЭИМ.
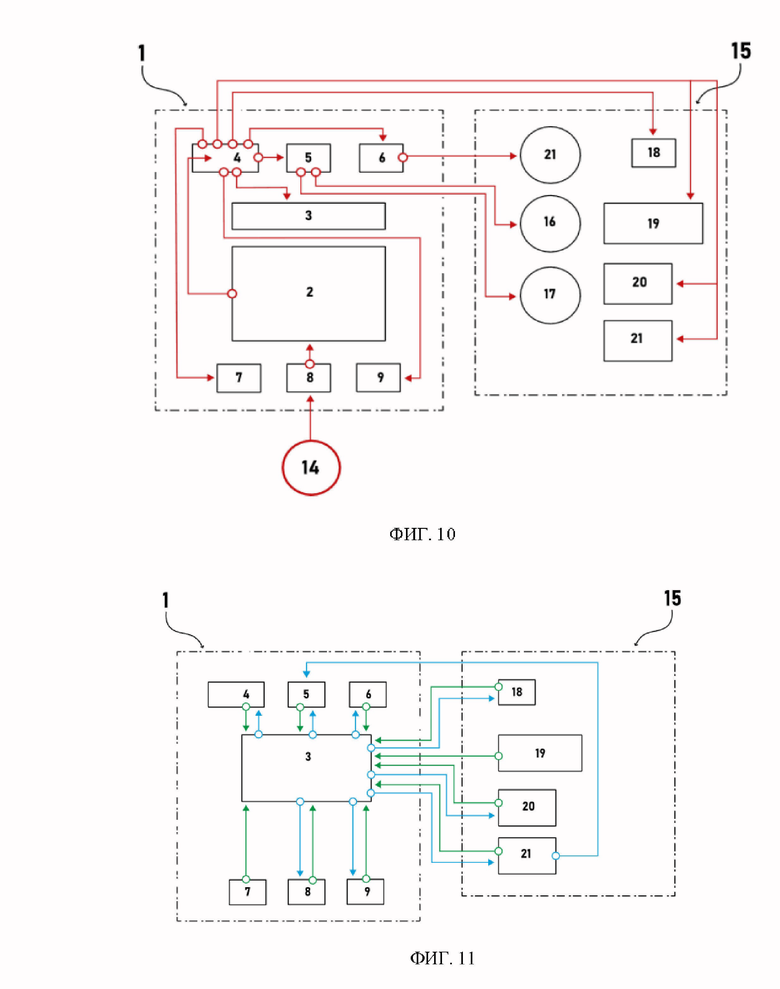
Фиг. 10 - Электрическая блок - схема АЭИМ.
Фиг. 11 - Коммуникационная блок-схема АЭИМ.
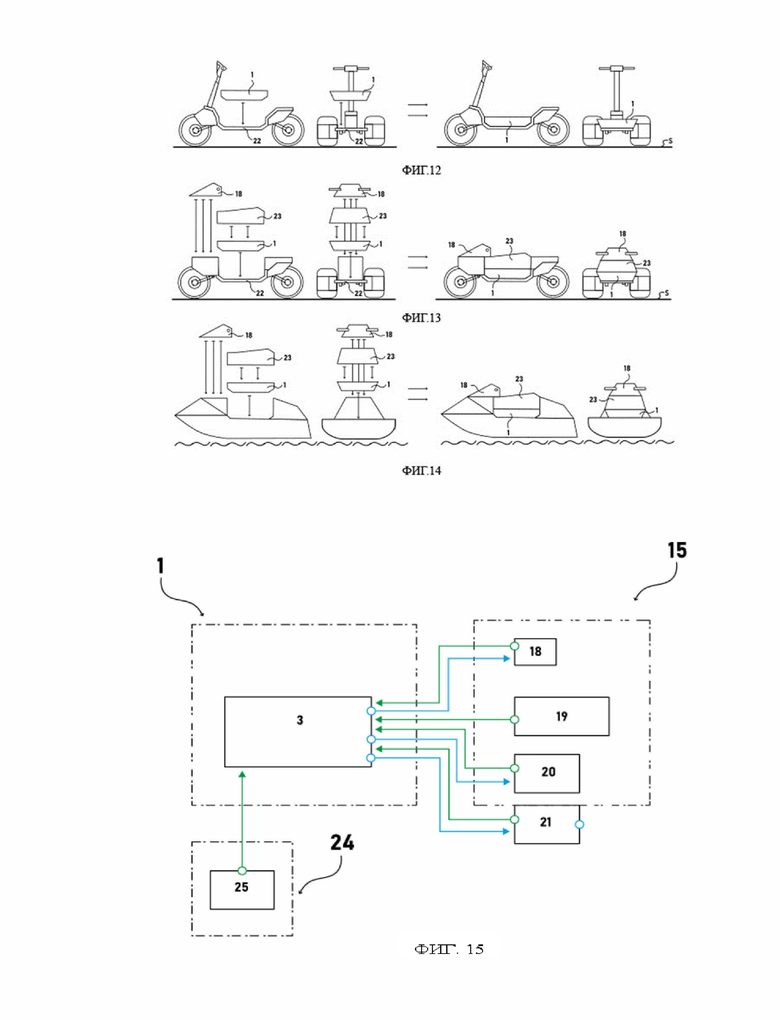
Фиг. 12, 13, 14 - Установка АЭИМ на различные транспортные средства.
Фиг. 15 - Схема адаптации АЭИМ под транспортные средства с различными движителями.
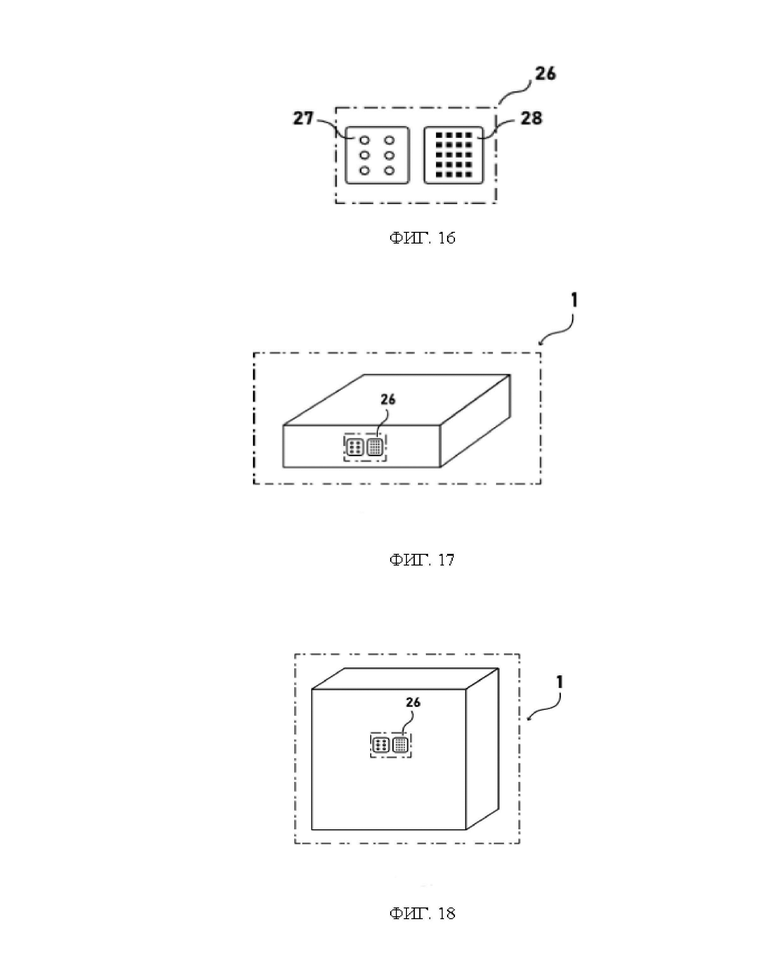
Фиг. 16 - Пример разъемов на блоке подключения силовых и слаботочных элементов к АЭИМ;
Фиг. 17, 18 - Изображение вариантов размещения разъемов на боковых сторонах АЭИМ или на его нижней части.
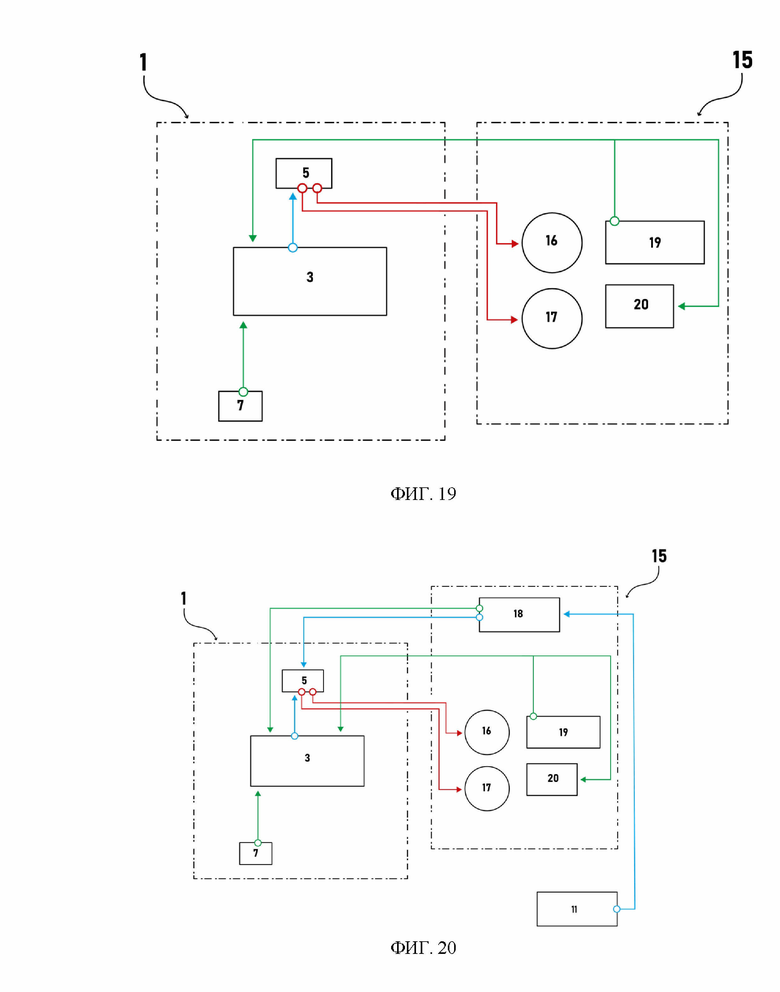
Фиг. 19, 20 - Схема работы двигателя движителей АЭИМ в различных режимах.
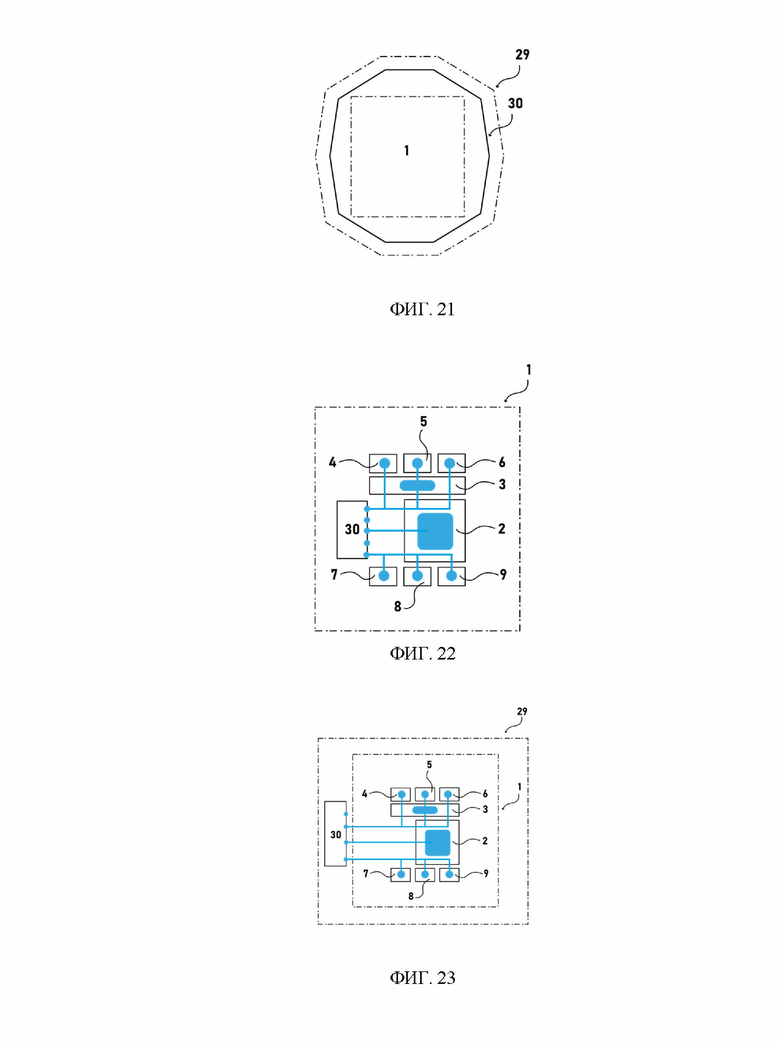
Фиг. 21 - Общая схема защиты корпуса АЭИМ.
На фигурах цифрами обозначены следующие конструктивные элементы:
1 - Адаптивный энерго-интеллектуальный модуль; 2 - источник питания; 3 - бортовой компьютер; 4 - блок контроля напряжения; 5 - блок управления двигателями; 6 - блок управления сервоприводами;7 - блок позиционирования устройства; 8 - блок управления зарядом источника питания; 9 - модуль управления освещением; 11 - пользователь, 12 - удаленный пользователь, 13 - модуль удаленной связи, 14 - устройство зарядки; 15 - внешние устройства; 16 - передние движители; 17 - задние движители; 18 - система рулевого управления; 19 - блоки системы машинного зрения; 20 - блоки дополнительного электрооборудования; 21 - блок системы ускорения и торможения; 22 - несущая рама транспортного средства; 23 - блок посадки пользователя транспортного средства; 24 - блок подключения; 25 - блок идентификации устройства; 26 - блок подключения; 27 - разъем для подключения силовых элементов; 28 - разъемы для подключения слаботочных элементов и коммуникаций, 29 - внешние стенки защитного корпуса, 30 - защитные материалы.
Осуществление изобретения.
Настоящее изобретение относится к области транспортных средств, может быть использовано как самостоятельный модуль для различных типов модульного транспорта, поддерживающего интеграцию данного типа управления и источника питания. Адаптивный энерго-интеллектуальный модуль, показанный на Фиг. 1, предназначенные для функционирования транспортных роботизированных средств для сбора информации, передвижения, транспортировки людей и грузов.
Адаптивный энерго-интеллектуальный модуль (АЭИМ) имеет в составе источник питания (2), бортовой компьютер (3), блоки контроля напряжения (4), блоки управления двигателями (5), блоки управления сервоприводами (6), блок позиционирования устройства (7), блок управления заряда источника питания (8), модуль управление освещением (9). Независимый энерго-интеллектуальный модуль для индивидуальных и роботизированных транспортных средств.
Управление осуществляется за счет бортового компьютера, который использует тип управления движителями в зависимости от типа транспортного средства. Тип транспортного средства устанавливаться за счет использования заложенных типовых шаблонов в бортовой компьютер АЭИМ. Бортовой компьютер использует нейросеть для управления транспортным средством используя заложенные алгоритмы и данные получаемых с подключенных внешних устройств. АЭИМ являться отдельным устройством заключенным в ударопрочный и влагозащищенный корпус, не менее 70% которого выполнено из композиционного материала с плотностью не менее 2000 кг/м.
Данное устройство имеет на корпусе разъёмы для подключения следующих устройств для функционирования транспортного средства, в частности:
- выводы для подключения периферийных устройств для сбора информации о окружающей среде посредством камер, радаров, лидаров и иного измерительного оборудования;
- выводы для подключения не более 4 движителей для управления и питания;
- выводы для подключения не более 4 электроприводов для управления и питания;
- выводы для подключения системы ручного управления транспортным средством, а также системой ускорения и торможения;
- выводы для подключения устройств визуального вывода информации и управления транспортным средством;
- выводы для подключения периферийного коммутационного оборудования, такие как антенны и датчики;
- выводы для подключения зарядных устройств для зарядки элементов питания, находящихся в АЭИМ;
- выводы для подключения освещения транспортного средства;
АЭИМ может управлять транспортными средствами использующие различные типы движителей таких как колесный, гусеничный, винтовой и реактивный тип движителей, такие как показаны на фигурах 7, 8, 9. Также может управлять транспортным средством в автономном режиме, дистанционно или используя ручное управление.
Работа двигателей движителей (16, 17) разделяется на 2-я категории, в рамках работы АЭИМ (1) и внешних устройств (15), к первой категории относиться управление в режиме автономного управления, ко второй категории относиться управление режиме ручного управления. Двигатели представляют собой электродвигатели, расположенные в передней и/или задней подвеске транспортного средства.
В режиме автономного управления при передвижении ТС, управление работой двигателей движителей (16,17) производиться бортовым компьютером (3) через блоки управления двигателями движителей (5) посредством управляющих сигналов (blue line). Бортовой компьютер (3) может управлять каждым отдельным двигателей движителей (16,17) исходя из заложенных алгоритмов и информационных сигналов (green line) с датчиков, таких как, блок позиционирования устройства (7), блоки системы машинного зрения (19), блоки дополнительного электрооборудования (20). Блоки управления двигателями движителей (5) получая управляющие сигналы (blue line) от бортового компьютера (3) могут изменять крутящий момент двигателей движителей (16,17) ускоряя их или замедляя, либо приводя к полной остановке.
Блоки управления двигателями движителей (5) управляют двигателями движителей (16, 17) с помощью силовых управляющих сигналов (red line).
В частности, в качестве силовых управляющих сигналов (red line) может выступать как изменение напряжения или частоты электрической тока, подаваемого на двигатели движителей (16, 17), так и иные управляющие сигналы, влияющие на работу двигателями движителей (16, 17).
В режиме ручного управления при передвижении ТС, управление работой двигателей движителей (16, 17) производится пользователем (11) через систему рулевого управления (18). Система рулевого управления (18) передает управляющие сигналы (blue line) на блоки управления двигателями движителей (5) для управления ТС, а также информационные сигналы (green line) на бортовой компьютер (3) для анализа состояния.
В частности, ручное управление производиться воздействие на рулевую стойку с последующим считывание положения вала «датчиком угла поворота». Данные с «датчика угла поворота» передаются на блоки управления двигателями движителей (5).
Блоки управления двигателями движителей (5), получая сигналы датчика угла поворота, могут изменять крутящий момент двигателей движителей (16,17) ускоряя их или замедляя, либо приводя к полной остановке с помощью силовых управляющих сигналов (red line).
Крутящий момент c двигателей движителей (16,17) передается на движители, представленные на фигурах 7, 8, 9 в зависимости от типа движителя.
В частности, в режиме ручного управления бортовой компьютер (3) может на основе заложенных алгоритмов и информации с датчиков, таких как, блок позиционирования устройства (7), блоки системы машинного зрения (19), блоки дополнительного электрооборудования (20), самостоятельно принимать решение об управлении ТС, путем передачи управляющих сигналов (blue line) на блоки управления двигателями движителей (5).
При дистанционном управлении ТС с помощью АЭИМ:
Удаленный оператор (12) совершает управление ТС с помощью удаленной связи с АЭИМ(1) путем передачи управляющих сигналов (blue line) на бортовой компьютер (3), получения информационных сигналов (green line) о состоянии элементов системы АЭИМ (1) и подключаемого оборудования (15) посредством модуля удаленной связи(13).
Удаленная связь с АЭИМ может осуществляться с помощью радиоволн на различных частотах или при использовании иных беспроводных источников связи.
Модуль удаленной связи(13) передает информационные сигналы (green line) удаленному оператору (12) от бортового компьютера (3) и получает от удаленного оператора(12) управляющих сигналов (blue line) для дальнейшей их передачи на бортовой компьютер (3). Бортовой компьютер (3) передает управляющие сигналы (blue line) на блоки управления двигателями движителей (5), которые управляют работой двигателей движителей (16, 17) с помощью силовых управляющих сигналов (red line).
Модуль удаленной связи (13) может быть частью бортового компьютера (3), так присутствовать как отдельный модуль в АЭИМ (1).
В качестве удаленного оператора (12), управляющим ТС и АЭИМ (1), в частности, может выступать как человек, так и иная интеллектуальная система.
АЭИМ (1) может быть размещен в защитном корпусе (29), который имеет места для размещения защитных материалов (30), обладающих свойствами защиты, такими как защита от электромагнитного излучения, армирующими и теплоизоляционными свойствами, а также иными требуемыми свойствами для защиты функционирования АЭИМ. Защитный корпус (29) АЭИМ может быть обеспечить защиту элементов АЭИМ, за счет создания жесткой внешней оболочки плотностью не менее 2000 кг/м. и путем использования дополнительных защитных материалов. Защитные материалы (30) могут быть размещены между АЭИМ (1) и внешними стенками защитного корпуса (29).
Материалы для защиты АЭИМ (1) могут иметь твердую, жидкую или иную форму состояния. Защитные материалы (30) АЭИМ могут комбинироваться из материалов с различными свойствами, для защиты работы от АЭИМ от различных источников неблагоприятного воздействия.
Защитный корпус (29) обеспечивает пыле- и гидроизоляцию АЭИМ за счет конструкции корпуса, системы креплений и использования пыле- и гидронепроницаемых материалов в метах соединения элементов защитного корпуса.
В зависимости климатической зоны или температурных условий использования в АЭИМ может использоваться пассивная или активная система охлаждения или обогрева элементов АЭИМ.
Активная система контроля температуры (30) АЭИМ может быть размещена в АЭИМ (1) ФИГ. 22, так и вынесена в защитный корпус (29) на ФИГ. 23.
При использовании АЭИМ в зонах с высоким температурным режимом эксплуатации более плюс 35°С, может использоваться активная система контроля температуры (30) для охлаждения элементов АЭИМ, таких как, бортовой компьютер (3), блоки управления двигателями движителей (5), блоки управления сервоприводами (6), блок позиционирования устройства (7), источника питания (8), блок управление освещением (9) и других блоков АЭИМ требующих более отрицательных(низких) температур для стабильной работы. В частности, источниками охлаждения могут выступать жидкости, газы или термоэлектрические преобразователи.
При использовании АЭИМ в зонах с низким температурным режимом эксплуатации ниже минус 15°С, может использоваться активная система контроля температуры (30) для обогрева элементов АЭИМ, таких как, бортовой компьютер (3), блок позиционирования устройства (7), источника питания (8) и других блоков АЭИМ требующих более положительных(высоких) температур для стабильной работы.
В частности, источниками обогрева могут выступать жидкости, газы, термоэлектрические преобразователи и электронагревательные приборы.
Для стабильной работы АЭИМ в умеренном температурном режиме от минус 5°С до плюс 30°С, в АЭИМ может использоваться пассивная система охлаждения за счет размещения блоков АЭИМ в теплопроводном корпусе и последующем отводе тепла на защитный корпус (29). Для пассивного обогрева блоков АЭИМ может использовать, в частности, теплоизоляционные материалы.
В частности, защитный корпус (29) и корпуса блоков АЭИМ могут иметь в составе радиаторные элементы для отвода тепла воздушным или жидкостным способом.
Использование АЭИМ позволяет повысить плотность компоновки силового и управляющего оборудования, за счет размещения оборудования в едином корпусе, что положительно влияет на массогабаритные характеристики транспортного средства.
Использование АЭИМ позволяет оперативно получать доступ к силовому и управляющему оборудованию для проведения ремонта, зарядки и обслуживания оборудования.
Благодаря конструкции корпуса АЭИМ может использоваться как несущим модулем, закреплённым на раме, так и не быть несущим модулем, может использоваться как часть транспортного средства, состоящего из модулей, так и как отдельное устройство на не модульном транспортном средстве.
Использование АЭИМ позволяет производить упрощенный монтаж/демонтаж силового и управляющего оборудования с транспортного средства, для перемещения на другие устройства, поддерживающие АЭИМ, за счет размещения оборудования в едином корпусе и наличии разъёмов для подключения.
Использование АЭИМ позволяет повысить надежность работы силового и управляющего оборудования, за счет использования материалов в корпусе АЭИМ, обладающих высокой прочностью. Корпус АЭИМ выполнен из материала с плотностью (ρ) не менее 2,50 г/см, что позволяет защитить оборудование от механического повреждения за счет создания прочного единого корпуса.
Использование АЭИМ позволяет повысить надежность работы силового и управляющего оборудования, за счет организации общей системы охлаждения и обогрева оборудования, защиты от электромагнитного излучения и гидроизоляции.
Электрическая схема, изображенная на фигуре 10, упомянутого выше АЭИМ показывает, как именно приводится в действие данный модуль при подсоединении к транспортному средству. Зарядка источник питания (2), находящегося в энерго-интеллектуальном модуле (1), производиться путем подачи напряжения с устройства зарядки (14) на блок контроля заряда и разряда источника питания (8). Устройство зарядки (14) расположено в транспортном средстве и соответствует выходным мощностным параметрам источник питания (2). Устройство зарядки (14) имеет входные мощностные параметры для использования бытовой сети (AC220V) или станции зарядки электротранспорта в качестве источника электрического тока.
В свою очередь, электрический ток с источника питания (2) подается на блоки контроля напряжения (4). Блоки контроля напряжения (4) представлены понижающими регуляторами напряжения создавая различные диапазоны входного и выходного напряжения для подачи напряжения на следующие типы электрооборудования:
- бортовой компьютер (3),
- блоки управления двигателями движителей (5),
- блоки управления сервоприводами (6),
- блок позиционирования устройства (7),
- блок управление освещением (9),
- система рулевого управления (18),
- блоки системы машинного зрения (19),
- блоки дополнительного электрооборудования (20).
- система ускорения и торможения (21).
Далее, блоки управления двигателями движителей (5) приводят в движение передние (16) и задние (17) движители посредство подачи напряжения разной мощности и частного регулятора. Блоки управления сервоприводами (6) приводят в движение сервоприводы (21) посредством подачи напряжения разной мощности и частотного регулятора
Электрическая блок-схема для энерго-интеллектуального модуля (1) характеризуется 2 типами зарядки источник питания (2). Первый тип работы зарядки использует устройство зарядки (14) расположенного в транспортном средстве и внешний источник электрического тока. Второй тип работы зарядки использует установленный на транспортной платформе гибридный генератор электрического тока.
Управляющие устройства в энерго-интеллектуальном модуле представлены 2-я категориями, к первой категории относиться основной управляющий блок включающий в себя бортовой компьютер (3) и вспомогательные управляющие блоки:
- блоки управления двигателями движителей (5),
- блоки управления сервоприводами (6),
- блок контроля заряда и разряда источника питания (8),
- блок управление освещением (9).
Бортовой компьютер (3) получает информационные сигналы (green line) и передает управляющие сигналы (blue line). Блок контроля заряда и разряда источника питания (8) передает показатели о состояния источник питания (2) в бортовой компьютер (3). Бортовой компьютер (3) на основании данных формирует алгоритм энергопотребления. Блоки системы машинного зрения (19) передают информацию на бортовой компьютер (3) о внешней обстановке. Бортовой компьютер (3) на основании данных формирует алгоритм движения и проводит анализ внешних факторов.
Блок позиционирования устройства (7) передают информацию на бортовой компьютер (3) о местоположении устройства в пространстве. Бортовой компьютер (3) передает управляющие сигналы на блоки управления двигателями движителей (5) для движения и остановки транспортного средства. Блоки управления двигателями движителей (5) передает информационные сигналы на бортовой компьютер (3) о параметрах состояния двигателей передних (16) и задних движителей (17). Бортовой компьютер (3) передает управляющие сигналы на блоки управления сервоприводами (6) для приведения в движение или остановки сервоприводами. Блок управления сервоприводами (6) передавать информационные сигналы на бортовой компьютер (3) о параметрах состояния сервоприводов.
Бортовой компьютер (3) передает управляющие сигналы на блок управление освещением (9) согласно световой схеме или на основании собственных алгоритмов управления. Блок управление освещением (9) передавать информационные сигналы на бортовой компьютер (3) о параметрах состояния элементов освещения. Блоки контроля напряжения (4) передавать информационные сигналы на бортовой компьютер (3) о состоянии выходного напряжения для потребителей электросети устройства. Бортовой компьютер (3) на основе полученных данных принимает решение о целостности питающей электрической сети и формирует схему энергопотребления.
Бортовой компьютер (3) передает управляющие сигналы на систему рулевого управления (18) для управления транспортным средством. Система рулевого управления (18) передает информационные сигналы на бортовой компьютер (3) о параметрах и своем состоянии. В режиме ручного управления система рулевого управления (18) может управляться пользователем при поддержке корректирующих управляющих сигналов от бортового компьютера (3) или при отсутствии их.
Работа системы ускорения и торможения (21) разделяется на 2-я категории, к первой категории относиться в управление режиме автономного управления, ко второй категории относиться управление режиме ручного управления.
В режиме автономного управления бортовой компьютер (3) передает управляющие сигналы на систему ускорения и торможения (21) для управления механической тормозной системой, если она присутствует. Система ускорения и торможения (21) передает информационные сигналы на бортовой компьютер (3) о параметрах и своем состоянии.
В режиме ручного управления система ускорения и торможения (21) передает управляющие сигналы на блоки управления двигателями движителей (5) об ускорении или торможении транспортного средства.
Механическая тормозная система используется при использовании наземных движителей (11), (12).
Бортовой компьютер (3) передает управляющие сигналы на блоки дополнительного электрооборудования (20). Блоки дополнительного электрооборудования (20) передают информационные сигналы на бортовой компьютер (3) о параметрах состояния электрооборудования.
АЭИМ (1) устанавливается на несущую раму транспортного средства (22) или на подготовленное место для размещения и подключения, как показано на фигурах 12, 13, 14. Для функционирования транспортного средства после установки АЭИМ на некоторых типах транспортных средств, таких как представленные на фигурах 13 и 14 транспортных средств, может потребоваться последующая установка модуля системы рулевого управления, а также блок посадки пользователя, в котором могут быть установлены модули дополнительного оборудования (20).
АЭИМ адаптируется под транспортные средства с различными движителями следующим образом. АЭИМ при подключении к транспортному средству или роботизированному устройству к блоку подключения (24) получает уникальный код устройства от блока идентификации устройства (25). Передача кода устройства происходит между блоком идентификации устройства (25) и бортовым компьютером (3). После бортовым компьютером (3) кода устройства с блока идентификации устройства (25), бортовой компьютер производит проверку оборудования (15) на соответствие с закрепленным за кодом характеристиками.
Код устройства представляет из себя набор цифр и букв. Уникальный код устройства закреплен за каждым типом транспортных средств или роботизированных устройств, предназначенных для совместной работы с АЭИМ (1). Код устройства характеризует тип и характеристики подключаемого оборудования (15), такого как: система рулевого управления (18), блоки системы машинного зрения (19), блоки дополнительного электрооборудования (20), система ускорения и торможения (21) и иного оборудования, требуемого для функционирования.
Само же подключение АЭИМ к ТС с различными движителями осуществляется следующим образом. АЭИМ (1) имеет на корпусе блок подключения. Блок подключения состоит из разъемов для подключения силовых элементов (27) и слаботочных элементов и коммуникаций (28). Разъем для подключения силовых элементов (27) предназначен для подачи напряжения на двигатели движителей. Также он может быть использован для подачи напряжения с внешнего устройства зарядки (14). Количество выводов на разъёме для подключения силовых элементов (27) на фигуре 16 изображены схематично.
Разъём для слаботочных элементов и коммуникации (28) предназначен для подачи напряжения на оборудование имеющих не высокое входное напряжение и для организации коммуникации между внешними модулями и оборудованием. Количество выводов на разъёме для слаботочных элементов и коммуникации (28) представлено схематично и может быть изменено.
- Блок подключения (26), изображенный на фиг. 16, расположенный на энерго-интеллектуальном модуле (1) может быть размещен как на боковых сторонах модуля, как показано на фиг. 17 энерго-интеллектуального модуля (1), так и на нижней части модуля, как показано на фиг. 18.
- Энерго-интеллектуальный модуль (1) может иметь один или два блока подключения (26).
Вышеперечисленные достоинства позволяют резко снизить количество потребляемого топлива и времени для нагрева, что подтверждает достижение заявленного технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Базовая платформа автономного интеллектуального робототехнического комплекса (АИРТК) | 2021 |
|
RU2764910C1 |
| Малогабаритное бортовое радиоэлектронное устройство для управления пилотажно-навигационным комплексом беспилотного летательного аппарата | 2021 |
|
RU2799748C2 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| МАЛОГАБАРИТНЫЙ ГУСЕНИЧНЫЙ ВЕЗДЕХОД С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ, ПОЛНОСТЬЮ РАСПОЛОЖЕННОЙ В ПОДГУСЕНИЧНОМ ПРОСТРАНСТВЕ | 2023 |
|
RU2809167C1 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| МАЛОГАБАРИТНЫЙ ГУСЕНИЧНЫЙ ВЕЗДЕХОД С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2023 |
|
RU2811594C1 |
Изобретение относится к адаптивному энерго-интеллектуальному модулю для управления транспортными средствами. Модуль представляет собой единый корпус, выполненный из композиционного материала, который включает в себя: источник питания, бортовой компьютер, блок контроля напряжения, блок управления двигателями, блок управления сервоприводами, блок позиционирования устройства, блок управления зарядом источника питания, модуль управления освещением, модуль удаленной связи, разъемы для подключения внешних устройств для функционирования транспортного средства, пассивную и/или активную систему охлаждения или обогрева элементов. Бортовой компьютер выполнен с возможностью управления движителями. Бортовой компьютер содержит нейросеть для управления транспортным средством. Корпус модуля выполнен из материала плотностью не менее 2,50 г/см3. Достигается повышение скорости монтажа/демонтажа оборудования транспортного средства, повышение надежности работы оборудования, упрощение проведения ремонта, зарядки и обслуживания оборудования. 7 з.п. ф-лы, 23 ил.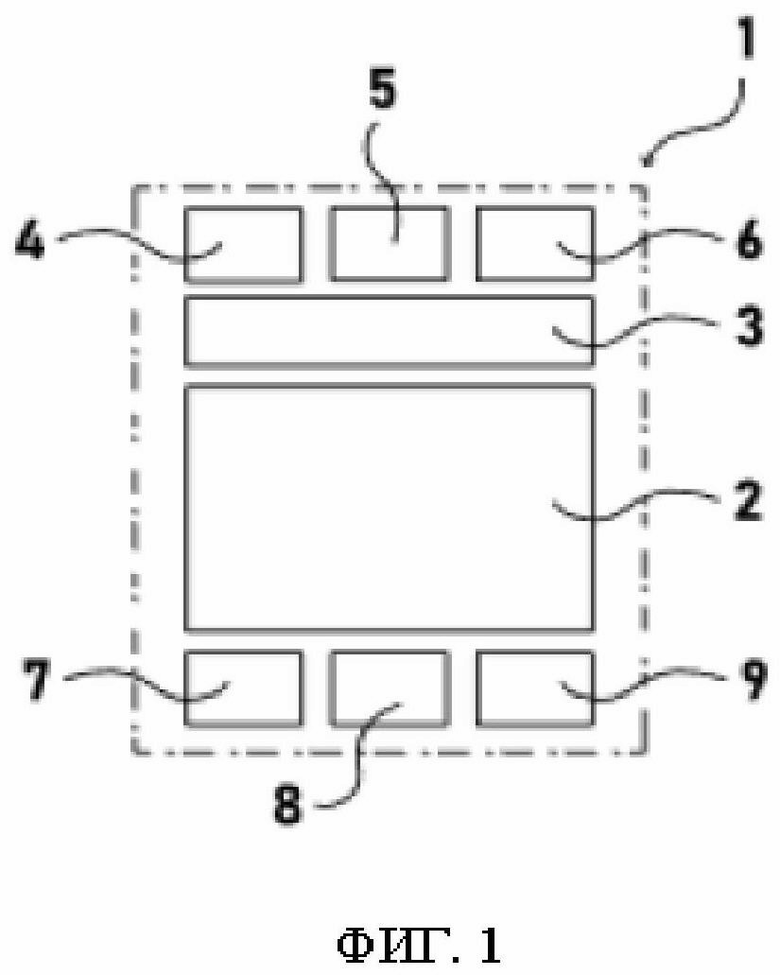
1. Адаптивный энерго-интеллектуальный модуль для управления транспортными средствами, представляющий собой единый корпус, выполненный из композиционного материала, который включает в себя:
источник питания, бортовой компьютер, управляющий, в том числе, движителями, по меньшей мере один блок контроля напряжения, по меньшей мере один блок управления двигателями, по меньшей мере один блок управления сервоприводами, блок позиционирования устройства, блок управления заряда источника питания, модуль управления освещением, модуль удаленной связи, при этом упомянутый выше корпус имеет разъемы для подключения внешних устройств для функционирования транспортного средства,
при этом упомянутый бортовой компьютер содержит нейросеть для управления транспортным средством, а также данные, получаемые с подключенных внешних устройств,
при этом материал, из которого выполнен упомянутый выше корпус, имеет плотность не менее 2,50 г/см3,
при этом модуль содержит пассивную и/или активную систему охлаждения или обогрева элементов.
2. Адаптивный энерго-интеллектуальный модуль по п.1, отличающийся тем, что корпус энерго-интеллектуального модуля размещен в защитном корпусе, состоящем из композиционного материала с плотностью не менее 2000 кг/м3.
3. Адаптивный энерго-интеллектуальный модуль по п.1, отличающийся тем, что движители представляют собой колесные, гусеничные, винтовые или реактивные движители.
4. Адаптивный энерго-интеллектуальный модуль по п.1, отличающийся тем, что модуль включает в себя управление транспортным средством в автономном режиме, дистанционном или используя ручное управление.
5. Адаптивный энерго-интеллектуальный модуль по п.1, отличающийся тем, что модуль закреплен на раме транспортного средства.
6. Адаптивный энерго-интеллектуальный модуль по п.1, отличающийся тем, что модуль является отдельным устройством на немодульном транспортном средстве.
7. Адаптивный энерго-интеллектуальный модуль по п.1, отличающийся тем, что модуль удаленной связи встроен в бортовой компьютер.
8. Адаптивный энерго-интеллектуальный модуль по п.1, отличающийся тем, что содержит защитный корпус с возможностью размещения в нем защитных материалов.
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2754021C1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| DE 102016114535 A1, 02.03.2017 | |||
| JP 2019043479 A, 22.03.2019. | |||

