Изобретение относится к области авиастроения и может найти применение при разработке и производстве малогабаритного бортового радиоэлектронного устройства для управления робототехническим комплексом беспилотного летательного аппарата.
В настоящее время беспилотные технологии прогрессируют быстрыми темпами, а интерес к ним со стороны общества и средств массовой информации растет еще быстрее [1-3]. Уже сегодня БПЛА широко используются для доставки гуманитарных грузов в разрушенные войной или природными катаклизмами точки, проведения масштабной разведки, проведения профессиональных и любительских киносъемок, помощи ремонтно-строительным бригадам, службам надзора и другим ведомствам.
В недалеком будущем диапазон применений новых воздушных технологий расширится за счет беспилотных пассажирских перевозок и спортивных пилотируемых полетов с применением БПЛА. Эти предположения основаны на появлении новых идей и разработок.
Удешевление и повышение надежности эксплуатации БПЛА невозможно без разработки универсального комплекта МБРЭО. Малый вес и возможность многократного дублирования систем позволяют разрабатывать БПЛА с повышенной эффективностью (повышение веса полезной нагрузки за счет снижения веса и энергопотребления комплекта МБРЭО), а также разрабатывать БПЛА малой размерности.
Существует множество разных БПЛА, но в каждом из них обязательно есть [4]: автопилот; датчики; система навигации; канал связи; источник энергии; двигательная установка.
Известен патент RU №2733453 С1, МПК В64С 39/02, G05D 1/00, G08G 5/00. «Способ автоматического управления движением роботизированного беспилотного летательного аппарата в автономном режиме». Опубл. 01.10.2020.
В процессе движения БПЛА оценивают состояние навигационного поля и при необходимости идентифицируют виды помехового воздействия, когда навигационное поле оказывается в наиболее опасном состоянии энергетического подавления или изменяется под воздействием активного спуфинга, то отключают коррекцию бесплатформенной инерциальной навигационной системы от навигационных данных приемника спутниковых навигационных систем и включают коррекцию от барометрического высотометра. Производят расчет прогнозируемого максимально допустимого времени автономного полета, если время до заданной точки назначения полетного задания меньше максимально допустимого времени автономного полета, то продолжают движение БПЛА в точку с заданными координатами, в противном случае полетное задание прерывают, выполняют полет в точку посадки. Обеспечивается возможность выполнения полетного задания в автономном режиме при отсутствии радиоканала дистанционного управления и искаженном или подавленном навигационном поле.
Недостатки: предложение по обеспечению успеха при выполнении полетного задания сводятся к отключению коррекции бесплатформенной инерциальной навигационной системы от навигационных данных приемника спутниковых навигационных систем, ограничиваясь включением коррекции от барометрического высотометра. При этом не обеспечивается безопасность полетов из-за большой погрешности определения места положения БПЛА, приводящей к непреднамеренным столкновениям его с естественными или искусственными препятствиями, либо земной поверхностью.
Известен патент RU №2390815 С1, МПК G05D 1/00. «Способ управления беспилотным летательным аппаратом и устройство для его реализации». Опубл. 27.05.2010.
Наиболее близким аналогом (прототипом) предлагаемого технического решения является патент US 8200605 В2, МПК G05D 1/0011, «Блок принятия решений для автономной платформы». Опубл. 12.06.2012.
В этом документе раскрывается информация о блоке принятия решения, его архитектуре, способе принятия решений, автономной платформе, реализующей эти функции (в т.ч. для БПЛА). Описанное в данном патенте техническое решение совпадает с предлагаемым техническим решением по следующим признакам:
- распознавание пространственных препятствий и объектов;
- анализ состояния системы;
- автономность платформы;
- выработка управляющих решений, в зависимости от состояния среды и системы, нацеленная на достижения цели задания;
- адаптируемость под различные ЛА.
Недостатками данного технического решения являются:
- отсутствие учета и оценки степени опасности полетной ситуации;
- не определены принципы минимизации степени опасности полетной ситуации;
- не рассматриваются возможности повышения надежности функционирования МБРЭО за счет дублирования управляющего канала обмена;
- не реализована функция подключения к симулятору полетов, что позволяет выполнять полунатурное моделирование во всех режимах работы МБРЭО, отработку полетного задания, проверку выполнения маневров, проводить обучение и тренировку обслуживающего персонала.
- не рассматривается возможность повышения надежности обеспечения МБРЭО электропитанием, а также его экономия;
- не достаточно проработан вопрос обеспечения высокой стабильности связи и помехоустойчивость в условиях отсутствия прямой видимости.
Задачей настоящего изобретения являлась разработка устройства на основе использования малогабаритного бортового радиоэлектронного оборудования (МБРЭО), удовлетворяющего требованиям повышенной точности, надежности, обеспечивающего высокую эффективность применения БПЛА по назначению.
МБРЭО состоит из следующих блоков, объединенных в устройство с помощью двух шин управления типа Control Area Network (CAN).
Блок 1. Блок управления полетом (БУП). БУП предназначен для управления всеми системами БПЛА на всех этапах полета. БУП - программно-аппаратный комплекс, обеспечивающий управление всеми системами БПЛА во всех режимах от взлета до посадки. Во время полета автопилот предусматривает автоматическую стабилизацию параметров движения БПЛА, а также стабилизацию высоты и скорости.
БУП включает модули:
- глобальная спутниковая система навигации (ГССН);
- стабилизации питания;
- микроконтроллера;
- энергонезависимого хранения данных.
Блок управления полетом осуществляет интеллектуальное управление полетом БПЛА в соответствии с введенным полетным заданием или управляющими командами оператора. На БУП поступает маршрутная, навигационная, телеметрическая информация о состоянии БПЛА и наземного пункта управления. В соответствии с отрабатываемыми алгоритмами управления, модуль генерирует стандартные управляющие электрические сигналы, подающиеся на вход типовых контроллеров сервоприводов рулевых машин БПЛА, контроллеров управления тяговыми двигателями, бортовой и контрольной световой индикации, парашютной системы и т.д.
Наличие двух шин CAN позволяет подключить к модулю два комплекта внешних датчиков, и организовать резервирование критически важных узлов БУП. Программа БУП определяет наличие и состояние подключенных датчиков и автоматически выбирает нужный датчик.
В блоке реализован протокол связи с контроллером управления двигателей с системой впрыска на тяжелом топливе серии HFE производства компании 3W international. Это позволяет управлять всеми режимами работы двигателя, а также получать информацию о его состоянии (температуру, частоту вращения, расход топлива и т.п.).
В блоке реализована функция подключения к симулятору полетов, что позволяет выполнять полунатурное моделирование во всех режимах работы БУП, отработку полетного задания, проверку выполнения маневров, проводить обучение и тренировку обслуживающего персонала.
БУП может использоваться как самостоятельно, так и во взаимодействии с другими блоками МБРЭО. Алгоритмы встроенного программного обеспечения (ПО) поддерживают управление БПЛА самолетного, вертолетного, мультироторного типа, а также летательных аппаратов с вертикальным взлетом и посадкой и с реактивной двигательной установкой.
БУП собирает информацию со всех датчиков инерциальной навигационной системы, вычисляет ориентацию и положение ЛА в пространстве и в соответствии с заданной программой полета осуществляет управление актуаторами: сервоприводы управляющих плоскостей, вентильные электродвигатели, двигатели внутреннего сгорания, реактивные двигатели. БУП имеет резервирование источников питания, шин управления CAN, а также может быть использован в режиме дублирования для повышения отказоустойчивости.
Блок 2. Блок инерциальной навигации (БИН). БИН предназначен для измерения угловых скоростей, линейных ускорений, географических координат и использования в качестве курсовертикали при построении БПЛА всех видов.
БИН включает модули:
- микроэлектронных механических датчиков угловой скорости;
- микроэлектронных механических датчиков линейного ускорения;
- микроэлектронных механических датчиков атмосферного давления;
- микроконтроллера.
Блок инерциальной навигации осуществляет прием и обработку сигналов глобальных спутниковых систем навигации GPS и ГЛОНАСС, регистрацию и обработку актуальных значений линейных и угловых ускорений БПЛА, транслируя на БУП комплексную информацию о позиционировании и динамике движения БПЛА в пространстве.
Блок инерциальной навигации является малогабаритным блоком измерения угловых скоростей, линейных ускорений, а также географических координат с высокой достоверностью. Предназначен для использования на малых, средних и тяжелых БПЛА. Малый размер корпуса позволяет разместить его близко к центру масс и выполнить виброразвязку для повышения точности измерений. Шина CAN позволяет надежно передавать данные в условиях неблагоприятной электромагнитной обстановки, обновлять встроенное ПО и контролировать состояние блока.
БИН выполнен в металлическом пыле-влагозащищенном корпусе с размещенным на нем разъемом для подключения бортовой кабельной сборки и антенны ГЛОНАСС/GPS.
Блок обеспечивает выдачу навигационных данных, углов ориентации, угловых скоростей и перегрузок, координат ГЛОНАСС/GPS. Взаимодействует с блоком БУП и входит в состав бортового сегмента САУ БПЛА. Снабжен интерфейсом CAN и GPS -модулем. Составляющие блоки САУ объединяются в бортовую информационную сеть по интерфейсу CAN.
К модулям подключается периферийное контрольно-измерительное и исполнительное оборудование БПЛА.
Блок 3. Блок измерения магнитного курса (БИМК) - магнитометр.
БИМК предназначен для измерения магнитного поля и расчета на основе полученных данных магнитного курса БПЛА. Блок содержит массив 3-осевых магниторезистивных датчиков, данные с которых сопоставляются, усредняются, валидируются на предмет попадания в доверительный интервал, компенсируется влияние местных искажений магнитного поля, приводятся к горизонту с учетом вычисленного положения датчика с использованием датчиков линейного ускорения.
БИМК включает модули:
- магниторезистивных датчиков напряженности магнитного поля Земли;
- микроэлектронных механических датчиков угловой скорости;
- микроэлектронных механических датчиков линейного ускорения;
- микроконтроллера.
БИМК выполнен в металлическом пыле-влагозащищенном корпусе с размещенным на нем разъемом для подключения бортовой кабельной сборки и антенны ГЛОНАСС/GPS.
Шина CAN позволяет повысить надежность обмена данными с блоком управления полетом.
Наличие нескольких магниторезистивных датчиков позволяет работать при выходе из строя одного из датчиков, а при исправных датчиках повышать точность измерения курса.
Также СПО имеет алгоритм упрощенной двухступенчатой калибровки на БПЛА, что повышает удобство использования блока на средних и тяжелых БПЛА.
Блок 4. Блок передачи данных широкополосный (БПДТТТ). БПДШ предназначен для организации широкополосного канала передачи данных между БПЛА и наземным пунктом управления.
БПДШ включает модули:
- радиомодуль;
- цифрового модема;
- питания;
- антенно-фидерное устройство.
БПДШ предназначен для передачи по радиоканалу цифровых данных с высокой скоростью, например, для потоковой трансляции Full HD видео, на значительные расстояния (100 и более километров). Система ориентирована на использование в беспилотных летательных аппаратах, а также для обеспечения связи с наземными подвижными объектами в условиях сложного рельефа местности.
Отличительными особенностями системы являются:
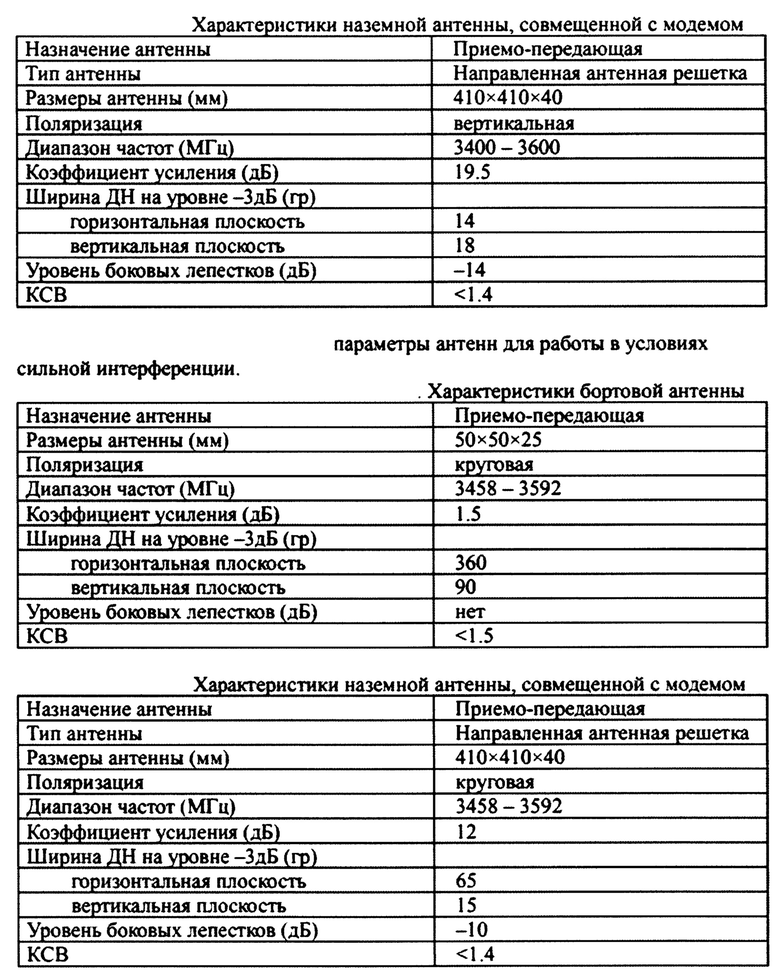
Большая дальность связи и скорость передачи данных в условиях прямой видимости, 100 км / 6 Мбит/с, при использовании 19 дБ наземной антенны и 6 дБ бортовой антенны.
Высокая стабильность связи и помехоустойчивость в условиях отсутствия прямой видимости, например, 1 км / 2 Мбит/с.
Использование универсальных модемов с возможностью одновременной работы в режимах приемника, передатчика и ретранслятора.
Допустима передача любых цифровых данных, имеется возможность широкой настройки параметров трафика по согласованию с заказчиком.
Поддержка современных цифровых интерфейсов для работы с периферийными устройствами (Ethernet, I2C, UART). Кроме этого, имеется возможность реализации нестандартных интерфейсов и протоколов передачи данных по согласованию с заказчиком.
Малые масса и габариты (150 г, 100×80×25 мм).
Возможность разнесенного приема с нескольких модемов.
Возможность построения системы связи типа «точка-многоточка».
Возможность автоматического выбора типа модуляции и избыточности для поддержания максимальной скорости передачи данных в зависимости от соотношения сигнал/шум.
Блок передачи данных обеспечивает широкополосную передачу данных на больших расстояниях, реализуя стандартный интерфейс FastEhternet для любых типов данных. Низкая задержка и высокая пропускная способность канала позволяет использовать канал для передачи видеоданных совместно с данными телеметрии и телеуправления БГША. Примененная модуляция позволяет поддерживать высокую помехозащищенность в неблагоприятной радиообстановке. Широкий диапазон напряжений питания позволяет применять БПДШ практически на любом малом/среднем/тяжелом БПЛА.
Малая масса блока позволяет применять блок, в том числе на малых БПЛА, имеющих серьезное ограничение по массе полезной нагрузки.
Все внешние интерфейсы модема, кроме СВЧ-разъемов, выведены на один 34-контактный разъем. В зависимости от требований могут использоваться либо разъемы без защелки PLD-34, PLD-34R; либо разъемы с защелками IDCC34MR.
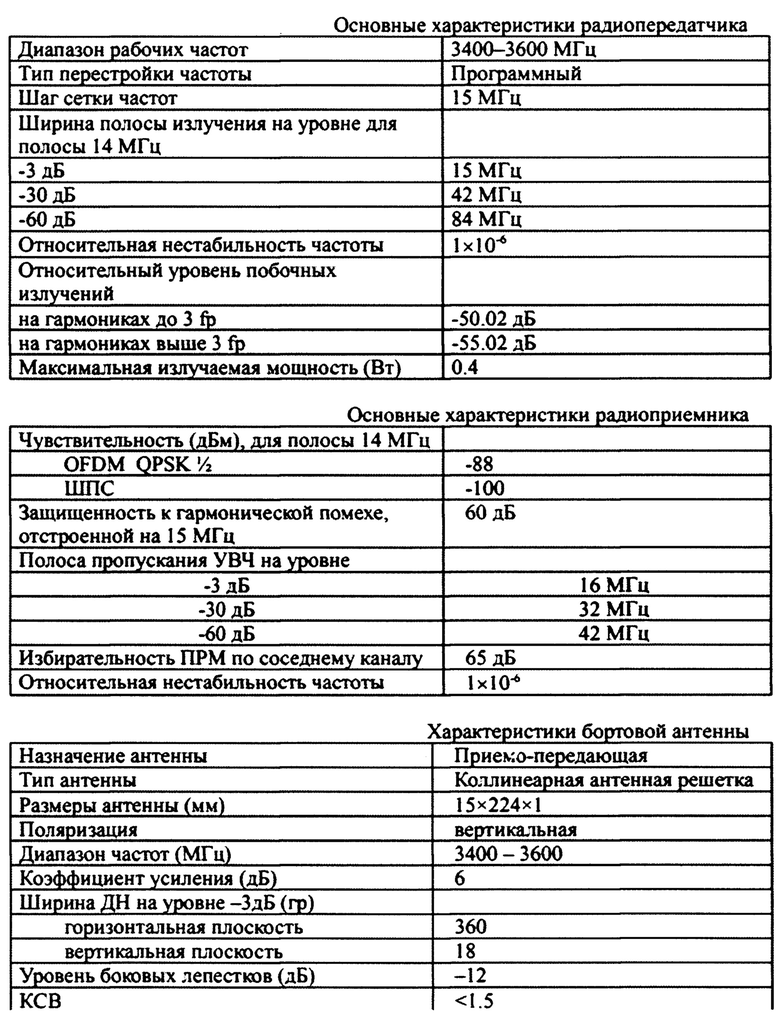
В таблице 1 приведены основные характеристики радиоканала БПДШ.
Блок 5. Регуляторы скорости вентильного двигателя (РСВД). РСВД предназначены для управления вентильными трехфазными асинхронными бесколлекторными двигателями постоянного тока с постоянными магнитами.
РСВД включает модули:
- драйвер силовых ключей;
- высокоскоростных силовых ключей;
- датчиков Холла и интерфейсов;
- микроконтроллера.
Регуляторы имеют алгоритмы управления BLDC 6 фазовый алгоритм и FOC - векторное управление. Примененные алгоритмы позволяют подобрать наиболее эффективный и экономичный режим управления двигателем. В векторном режиме обеспечивается высокая точность управления и высокий крутящий момент на околонулевых скоростях, постоянный контроль положения ротора без датчиков Холла, высокую надежность синхронизации электрического поля и скорости вращения ротора. Векторное управление позволяет использовать бесколлекторные двигатели в режиме сервопривода, высокоточно управляя положением ротора.
Регуляторы имеют режим торможения с рекуперацией или свободного выбега.
Микроконтроллер высокой производительности со встроенным блоком вычислений с плавающей точкой позволяет управлять двигателями с большим количеством магнитных полюсов с достижением высокой скорости вращения без потери точности управления. Встроенный теплоотвод и герметизация теплоотводящим силиконовым герметиком позволяет эксплуатировать регуляторы в широком диапазоне эксплуатационных температур и влажностей.
Основными особенностями РСВД являются:
Технология векторного управления FOC с сенсорным и без сенсорным режимами.
Авто определение всех параметров мотора.
Встроенное ПО на базе ОСРВ Chibos.
Контроль тока и напряжения на всех фазах двигателя.
Регенеративное торможение.
Поддержка моторов постоянного тока.
Программа настройки с графическим интерфейсом.
Адаптивная частота ШИМ для точного измерения АЦП.
Наращивание фазы на основе измеренной частоты вращения.
Хороший пусковой крутящий момент даже в бессенсорном режиме.
Функции тахометра и одометра.
Управление скважностью, скоростью или током.
Реверс в любом режиме управления.
Бесшовное четырехквадрантное управление.
Счетчики потребляемых и регенерированных ампер-часов и ватт-часов.
Контроллер получает питание от силовой батареи или и от отдельного входа.
Встроенный датчик температуры силовых ключей.
Вход для подключения внешнего датчика температуры мотора.
Вход для подключения внешнего датчика положения вала мотора (опция).
Применена регулируемая защита от:
Низкого входного напряжения;
Высокого входного напряжения.
Высокого тока двигателя.
Высокого тока потребления.
Высокого тока рекуперативного торможения, - использующего отдельные пределы для двигателя и входа.
Быстрого линейного изменения рабочего цикла.
Высоких оборотов, использующего отдельные пределы для каждого направления.
При достижении ограничения используется стратегия мягкого торможения, при этом двигатель продолжает работать. Если ток становится слишком высоким, двигатель полностью отключается.
Ограничение оборотов также использует стратегию мягкого торможения.
Коммутация прекрасно работает даже при быстром изменении скорости двигателя. Это связано с тем, что магнитный поток интегрируется после пересечения нуля вместо того, чтобы добавлять задержку, основанную на предыдущей скорости.
Когда управление двигателем отключено, а двигатель вращается, контроллер продолжает отслеживать положение двигателя и выполнять расчет рабочего цикла, что позволяет выполнить плавный пуск при вращающемся двигателе.
Все измеренные и рассчитанные параметры доступны в виде телеметрии на управляющих интерфейсах.
Блок 6. Блок управления полетом для малых БПЛА (БУПМ). БУПМ предназначен для построения малогабаритных летательных аппаратов мультироторного типа.
БУМП включает модули:
- микроэлектронных механических датчиков угловой скорости;
- микроэлектронных механических датчиков линейного ускорения;
- микроэлектронных механических датчиков атмосферного давления;
- микроэлектронных механических датчиков магнитного поля Земли;
- энергонезависимого хранения данных;
- микроконтроллера.
БУПМ предназначен для приема и обработки информации, поступающей от датчиков, блока приема воздушных сигналов (БПВС), блока инерциальной навигации (БИН), управления исполнительными устройствами, информационного обмена с наземным пунктом управления, приема сигналов со спутников системы спутникового глобального позиционирования ГЛОНАСС/GPS. Составляющие блоки САУ объединяются в бортовую информационную сеть по интерфейсу CAN. К блокам подключается периферийное контрольно-измерительное и исполнительное оборудование БПЛА.
Блок управления имеет малые габариты, построен по модульному принципу и позволяет использовать преимущества концепции блочно-модульного построения МБРЭО в малых габаритах с сохранением высокой надежности, гибкости и функциональности старших моделей.
В основе информационного обмена лежит шина CAN, ПО с открытым исходным кодом, многократно проверенное на практике и позволяющее снизить совокупную стоимость разработки и владения БПЛА. Блочно-модульный принцип позволяет размещать отдельные модули в наиболее выгодных в конструктивном смысле точках корпуса БПЛА.
Блок управления позволяет в короткие сроки построить надежный, компактный БПЛА с обширным функционалом, легко расширяемый благодаря открытому исходному коду и совместимости с большим количеством имеющихся проектов БУП.
Блок 7. Блок питания интеллектуальный (БПИ). БПИ предназначен для обеспечения электропитанием всех устройств бортовой радиоэлектронной аппаратуры с контролем потребления и возможностью зарядки бортовой аккумуляторной батареи (АКБ).
БПИ включает модули:
- высокоэффективных преобразователей напряжения;
- коммутационных твердотельных ключей;
- датчиков тока;
- микроконтроллера;
- датчиков напряжения.
Блок питания интеллектуальный (БПИ) предназначен для установки на БПЛА и другие подвижные объекты в составе САУ и обеспечивает питанием все системы БПЛА и полезную нагрузку. В качестве источника питания выступает аккумуляторная батарея (АКБ), генератор или внешнее (аэродромное) питание. При работе от генератора или внешнего питания, блок обеспечивает управляемый заряд АКБ. Силовая часть блока выполнена в виде двух независимых каналов, что позволяет подключать две АКБ, тем самым обеспечивая резервирование питания систем БПЛА. Так же блок реализует функцию контроллера различных датчиков, таких как: датчик напряжений и тока потребления, датчики температуры, датчик оборотов двигателя и т.п. и управления самолетными системами.
БПИ выполнен в металлическом пыле-влагозащищенном корпусе с размещенными на нем разъемами для подключения бортовой кабельной сборки, и двумя разъемами для подключения АКБ. Блок управляется по шине CAN от БУП.
Блок питания построен с учетом задачи обеспечения качественным питанием бортового радиоэлектронного оборудования, обеспечивает управление отдельными источниками напряжения, высокий КПД, контроль потребления и зарядку бортовой АКБ посредством преобразования напряжения генератора (при его наличии), а также контроль всех параметров энергопотребления, защиту от короткого замыкания, перегрева, превышения по току потребления, перенапряжения, двусторонний обмен данными с БУП посредством шины CAN. При этом блок имеет компактные размеры, встроенный теплоотвод, малую массу, высокую эффективность использования запасенной в бортовой АКБ энергии.
Блоки МБРЭО устанавливаются на борту БПЛА. Они должны быть обеспечены теплоотводом. При выборе места установки должна быть обеспечена возможность подключения к соответствующим сигнальным кабелям и доступ к слоту microSD карты для возможности ее извлечения.
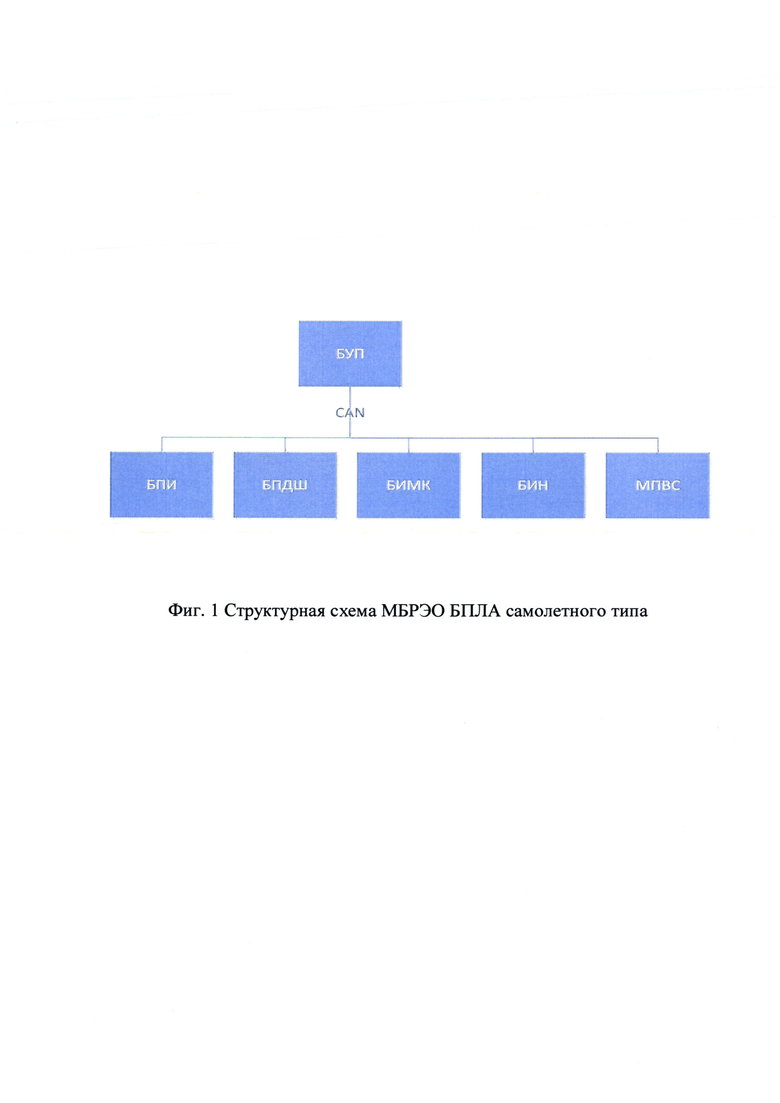
В связи с тем, что конструктивно комплект МБРЭО может быть использован на различных типах БПЛА, а именно самолетного, вертолетного мультироторного или конвертопланного типов, конструкция блоков остается неизменной, меняется только их комплектация. Так, для БПЛА самолетного типа необходим как правило один силовой электродвигатель и один РСВД (Фиг. 1).
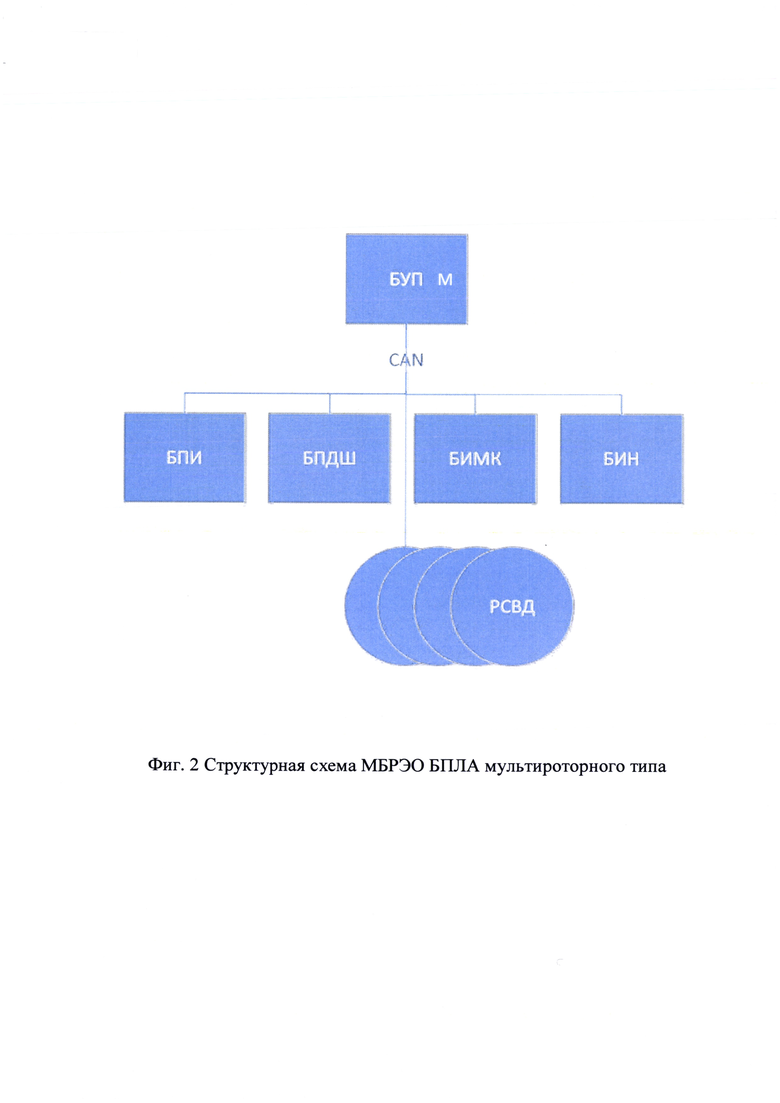
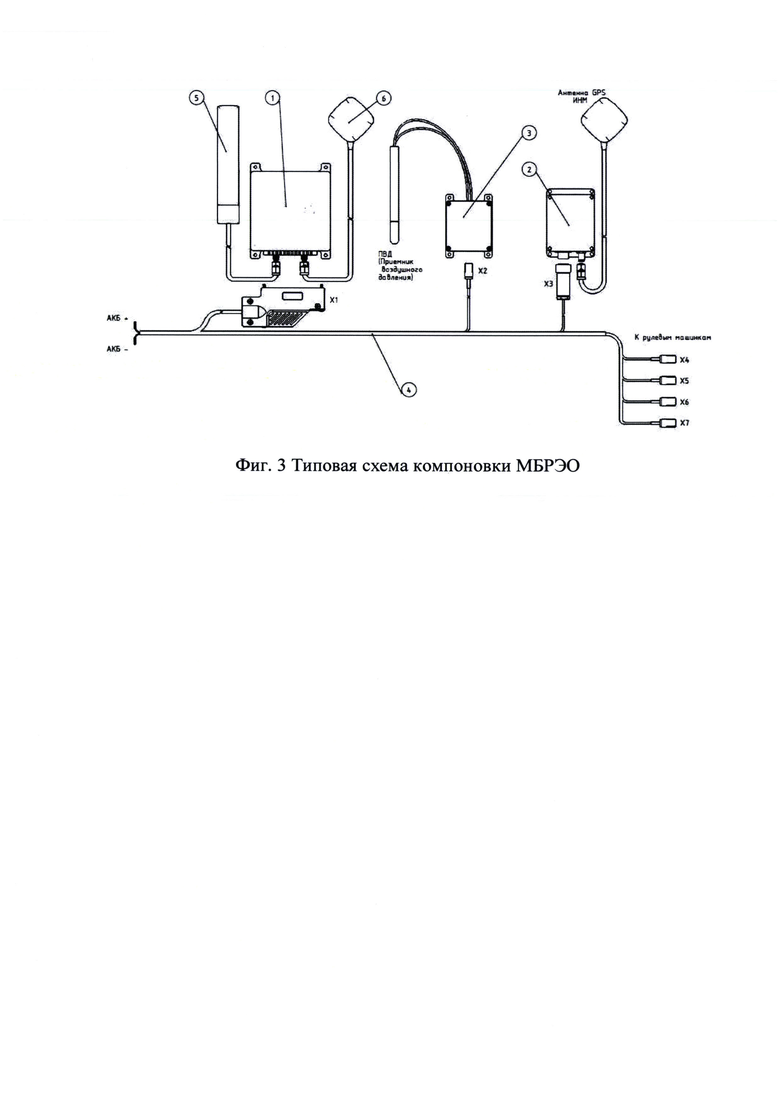
Для БПЛА мультироторного или конвертопланного типов потребуется несколько регуляторов силовых электромоторов (по количеству силовых установок) и структурная схема БРЭО в этом случае будет выглядеть несколько иначе (Фиг. 2). Отличие будет только в применяемом в БУП ПО. Типовая схема компоновки малогабаритного радиоэлектронного устройства для управления робототехническим комплексом беспилотного летательного аппарата приведена на Фиг. 3.
Заявляемое изобретение поясняется чертежами, изображенными на фиг. 1-3.
На Фиг. 1 представлена Структурная схема МБРЭО БПЛА самолетного типа.
На Фиг. 2 представлена Структурная схема МБРЭО БПЛА мультироторного типа.
На Фиг. 3 представлена Типовая схема компоновки малогабаритного радиоэлектронного устройства для управления робототехническим комплексом беспилотного летательного аппарата.
На Фиг. 3 изображено:
1. Блок управления полетом
2. Блок инерциальной навигации
3. Блок приема воздушных сигналов
4. Типовой соединительный кабель
5. Антенна блока передачи данных широкополосного
6. Антенна приемника системы спутниковой навигации ГЛОНАСС/GPS
Технический результат - повышение точности, надежности и эффективности управления БПЛА.
Источники информации
1. Навигация и управление движением. Материалы XXI конференции молодых ученых «Навигация и управление движением» с международным участием / Науч. редактор д.т.н. проф. О.А. Степанов / Под общ. ред. академика РАН В.Г. Пешехонова. - СПб: ГНЦ РФ АО «Концерн «ЦНИИ «Электроприбор», 2019.
2. 924 Государственный центр беспилотной авиации Министерства обороны Российской Федерации. Перспективы развития и применения комплексов с беспилотными летательными аппаратами. Сборник статей и докладов по материалам ежегодной научно-практической конференции Коломна, 2016 г.
3. Мэтью Флинт, Эммануэль Фернандес и Мариос Поликарпу. «Эффективные байесовские методы обновления и хранения неопределенной поисковой информации для БПЛА»//Департамент электротехники и информатики. Университет Цинциннати, Цинциннати, Огайо 45221-0030, США.
4. Хайян Чао, Ен Кан Цао, и Ян Цюань Чэнь «Автопилоты для малых беспилотных летательных аппаратов»: Обзор// Международный журнал управления, автоматизации и систем (2010) 8(1):36-44 DOI 10.1007/sl2555-О10-0105-z.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2023 |
|
RU2809930C1 |
| КОМПЛЕКС РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНЫМИ РОБОТАМИ ДЛЯ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2019 |
|
RU2717047C1 |
| СПОСОБ ПРИМЕНЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2457531C1 |
| Автономный беспилотный летательный аппарат для доставки малокалиберных боеприпасов до цели | 2023 |
|
RU2826931C1 |
| Система доставки груза на место проведения горнодобывающим субъектом взрывных работ (варианты) | 2024 |
|
RU2840365C1 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2019 |
|
RU2767938C2 |
| Система автономного лазерного определения координат БВС без использования модулей GPS/ГЛОНАСС | 2019 |
|
RU2723692C1 |
| Беспилотный летательный аппарат для обработки пестицидами садовых деревьев и кустарников | 2023 |
|
RU2808292C1 |
Группа изобретений относится к области авиастроения и может найти применение при разработке и производстве малогабаритных бортовых радиоэлектронных устройств для управления пилотажно-навигационным комплексом беспилотного летательного аппарата (БПЛА). Первый вариант устройства для управления пилотажно-навигационным комплексом БПЛА самолетного типа содержит автопилот, блок управления полетом (БУП), блок инерциальной навигации (БИН), блок измерения магнитного курса (БИМК) - магнитометр, блок передачи данных широкополосный (БПДШ), блок питания интеллектуальный (БПИ). Второй вариант устройства для управления пилотажно-навигационным комплексом БПЛА мультироторного типа содержит блок управления полетом для малых БПЛА (БУПМ), БИН, БИМК, БПДШ, БПИ, регуляторы скорости вентильного двигателя (РСВД), объединенных в устройство с помощью двух дублирующих шин управления типа CAN. Группа изобретений направлена на повышение точности, надежности и эффективности управления БПЛА. 2 н.п. ф-лы, 3 ил., 1 табл.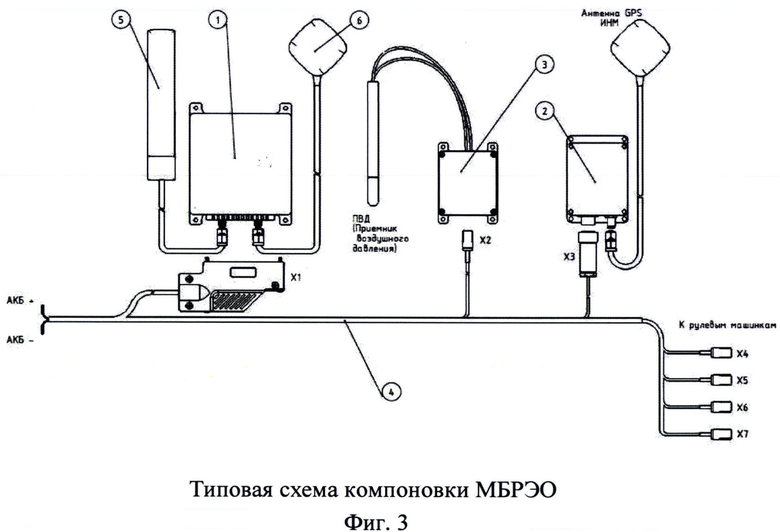
1. Малогабаритное бортовое радиоэлектронное устройство для управления пилотажно-навигационным комплексом беспилотного летательного аппарата самолетного типа, включающее автопилот, датчики, систему навигации, канал связи, источник энергии, двигательную установку, отличающееся тем, что включает в себя:
- блок управления полетом (БУП), представляющий собой программно-аппаратный комплекс, обеспечивающий управление всеми системами БПЛА во всех режимах от взлета до посадки, осуществляющий автоматическую стабилизацию параметров движения БПЛА, стабилизацию высоты и скорости, осуществляющий интеллектуальное управление полетом БПЛА в соответствии с введенным полетным заданием или управляющими командами оператора, генерирующий стандартные управляющие электрические сигналы, подающиеся на вход типовых контроллеров сервоприводов всех систем управления БПЛА, реализующий протокол связи с контроллером управления двигателей, функцию подключения к симулятору полетов, позволяющий выполнять полунатурное моделирование во всех режимах работы БУП, реализующий алгоритмы встроенного программного обеспечения (ПО) БУП, поддерживающий управление БПЛА самолетного, вертолетного, мультироторного типа, летательных аппаратов с вертикальным взлетом и посадкой и с реактивной двигательной установкой, собирающий информацию со всех датчиков инерциальной навигационной системы и модуля приема воздушных сигналов (МПВС), вычисляющий ориентацию и положение БПЛА в пространстве и в соответствии с заданной программой полета, осуществляющий управление актуаторами: сервоприводы управляющих плоскостей, вентильные электродвигатели, двигатели внутреннего сгорания, реактивные двигатели;
- блок инерциальной навигации (БИН), предназначенный для измерения угловых скоростей, линейных ускорений, географических координат и использования в качестве курсовертикали при построении БПЛА всех видов, осуществляющий прием и обработку сигналов глобальных спутниковых систем навигации GPS и ГЛОНАСС, навигационных данных, углов ориентации, угловых скоростей и перегрузок, регистрацию и обработку актуальных значений линейных и угловых ускорений БПЛА, транслирующий на БУП комплексную информацию о позиционировании и динамике движения БПЛА в пространстве, снабженный интерфейсом CAN и GPS-модулем.
- блок измерения магнитного курса (БИМК) - магнитометр, предназначенный для измерения магнитного поля и расчета на основе полученных данных магнитного курса БПЛА, содержащий массив 3-осевых магниторезистивных датчиков, данные с которых сопоставляются, усредняются, валидируются на предмет попадания в доверительный интервал, с компенсацией влияния местных искажений магнитного поля, приведением к горизонту с учетом вычисленного положения датчика с использованием датчиков линейного ускорения, ПО БИМК, имеющий алгоритм упрощенной двухступенчатой калибровки на БПЛА;
- блок передачи данных широкополосный (БПДШ), предназначенный для передачи по радиоканалу цифровых данных с высокой скоростью, например, для потоковой трансляции Full HD видео, дальность связи и скорость передачи данных в условиях прямой видимости, 100 км / 6 Мбит/с, при использовании 19 дБ наземной антенны и 6 дБ бортовой антенны, высокую стабильность связи и помехоустойчивость в условиях отсутствия прямой видимости, например, 1 км / 2 Мбит/с;
- блок питания интеллектуальный (БПИ), предназначенный для обеспечения электропитанием всех устройств бортовой радиоэлектронной аппаратуры с контролем потребления и возможностью зарядки бортовой аккумуляторной батареи (АКБ), оборудованный силовой частью в виде двух независимых каналов, позволяющей подключать две АКБ, тем самым обеспечивая резервирование питания систем БПЛА, реализующий функцию контроллера различных датчиков, управления самолетными системами, построенный с учетом задачи обеспечения качественным питанием бортового радиоэлектронного оборудования, обеспечивающий управление отдельными источниками напряжения, высокий КПД, контроль потребления и зарядку бортовой АКБ посредством преобразования напряжения генератора, а также контроль всех параметров энергопотребления, защиту от короткого замыкания, перегрева, превышения по току потребления, перенапряжения, двусторонний обмен данными с БУП посредством шины CAN.
2. Малогабаритное бортовое радиоэлектронное устройство для управления пилотажно-навигационным комплексом беспилотного летательного аппарата мультироторного типа, состоящее из: БИН, БИМК, БПДШ, РСВД, БПИ, блока управления полетом для малых БПЛА (БУПМ), предназначенного для построения малогабаритных летательных аппаратов мультироторного типа, приема и обработки информации, поступающей от датчиков, БИН, БИМК, управления исполнительными устройствами, информационного обмена с наземным пунктом управления, приема сигналов со спутников системы спутникового глобального позиционирования ГЛОНАСС/GPS, блоков регуляторов скорости вентильного двигателя (РСВД), предназначенных для управления вентильными трехфазными асинхронными бесколлекторными двигателями постоянного тока с постоянными магнитами, имеющие алгоритмы - регуляторы управления BLDC 6 фазовый алгоритм, позволяющие подобрать наиболее эффективный и экономичный режим управления двигателем, алгоритмы управления FOC - векторное управление, обеспечивающие высокую точность управления и высокий крутящий момент на околонулевых скоростях, постоянный контроль положения ротора без датчиков Холла, высокую надежность синхронизации электрического поля и скорости вращения ротора, позволяющие использовать бесколлекторные двигатели в режиме сервопривода, высокоточно управляя положением ротора, объединенных в устройство с помощью двух дублирующих шин управления типа CAN, устанавливающееся на борту БПЛА, обеспечивающееся теплоотводом, возможностью подключения к соответствующим сигнальным кабелям и доступом к слоту microSD карты для возможности ее извлечения.
| US 8200605 В2, 12.06.2012 | |||
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ | 2018 |
|
RU2714977C1 |
| ОБЪЕМНЫЙ РАСХОДОМЕР ЖИДКОСТИ ИЛИ ГАЗА | 0 |
|
SU164139A1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ПРЕДМЕТОВ В ПОТОКЕ ЛиТЕРИАЛА | 0 |
|
SU200039A1 |
| US 20210310826 A1, 07.10.2021 | |||
| WO 2016020570 A1, 11.02.2016. | |||

