Область техники, к которой относится изобретение
Изобретение относится к области систем управления движением поездов на сети железных дорог (ж.д.) и касается совершенствования алгоритма взаимодействия микропроцессорной системы автоведения локомотива и системы диспетчерской централизации с целью повышения эффективности работы железнодорожного транспорта.
Адаптивная система управления движением поезда состоит из микропроцессорной системы автоведения локомотива, диспетчерской централизации и виртуального вычислительного комплекса, развернутого на сервере диспетчерской централизации. Виртуальному вычислительному комплексу передана функция расчета алгоритма управления локомотивом с учетом текущей поездной ситуации, графика движения, сигналов железнодорожной автоматики, параметров поезда, климатических условий. Технический результат заключается в повышении быстродействия и надежности работы системы управления локомотивом с возможностью реализовать наилучший алгоритм движения при заданных условиях эксплуатации.
Уровень техники
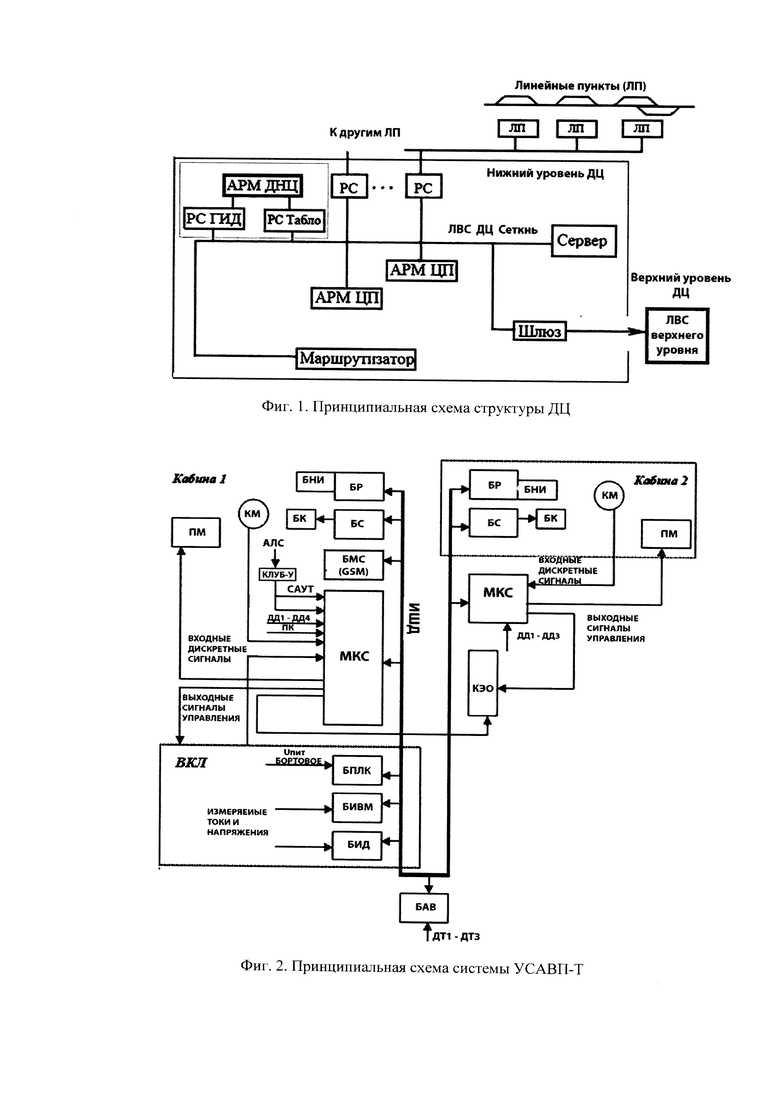
В настоящее время управление движением поездов на сети ж.д. осуществляется диспетчерской централизацией (ДЦ) (Фиг. 1). Система ДЦ «Сетунь» осуществляет контроль и управление движением на железнодорожных узлах, станциях и участках дорог [1, 2, 3, 4].
ДЦ имеет два взаимосвязанных уровня: верхний и нижний. Верхний уровень -единый центр диспетчерского управления. Аппаратура центрального поста (ЦП) нижнего уровня предназначена для ввода, отображения и регистрации информации на автоматизированных рабочих местах (АРМ). Аппаратура линейных пунктов (ЛП) осуществляет связь с устройствами автоматики на станциях и перегонах и содержит устройства ввода информации, интерфейсы связи с исполнительными и контролируемыми элементами. Компьютеры рабочих станций (PC) объединены в локальную вычислительную сеть (ЛВС) и осуществляют взаимодействие АРМ ЦП с ЛП по линиям связи через встроенные в них модемы с использованием маршрутизаторов, назначение которых - управление потоками данных в соответствии с объявленной таблицей маршрутизации. На автоматизированном рабочем месте диспетчера движения (АРМ ДНЦ) через рабочую связь «График исполнения движения» (PC ГИД) и рабочую связь «Табло» отображается информация о выполнении графика движения поездов. Сервер ДЦ используется для хранения всех сигналов и приказов, отдаваемых диспетчером. PC «Шлюз» предназначена для передачи информации об исполнении графика движения, поступающей из ЛВС нижнего уровня в ЛВС верхнего уровня, а также для обратной передачи информации, поступающей от информационно-управляющих систем верхнего уровня в кольцо ЛВС ДЦ «Сетунь».
Рабочие станции «Связь» PC (основная и резервная) организуют связь с диспетчерским участком по цепочечной структуре. Пункт управления имеет основной и резервный системные блоки.
К основным функциям ДЦ относятся [1, 2, 3, 4]:
- контроль и отображение состояния путевых объектов;
- непрерывный контроль поездной ситуации на участке в автоматическом режиме с учетом номеров, индексов поездов и других данных - до 32 ЛП при однопутном и многопутном движении поездов [1];
- передача штатных команд на ЛП;
- передача ответственных команд на ЛП;
- ведение системного журнала (технологического протокола);
- ведение графика исполненного движения поездов с его анализом;
- обмен информацией с компонентами ДЦ «Сетунь» соседних участков, с информационно-управляющими системами верхнего уровня и едиными базами данных региональных центров управления перевозками;
- возможность по предложениям заказчика наращивания функций АРМ ДНЦ, в частности, при принятии диспетчером ответственных решений в нештатных и аварийных ситуациях [1].
Информация о состоянии контролируемых объектов по станциям и перегонам (нижний уровень) передается по каналам связи на сервер ДЦ, объединяющий все компоненты системы. Верхний и нижний уровни создается на базе аппаратных и программных средств, включая средства удаленного доступа и объединения локальных сетей [2,3,4].
Максимальное время передачи команды по каналу управления ДЦ составляет не более 1,8 с [1].
Максимальное время поступления на пульт управления текущей информации (время цикла) не более 5,0 с при вероятности искажения элементарной посылки в канале передачи не более 10-4 [1].
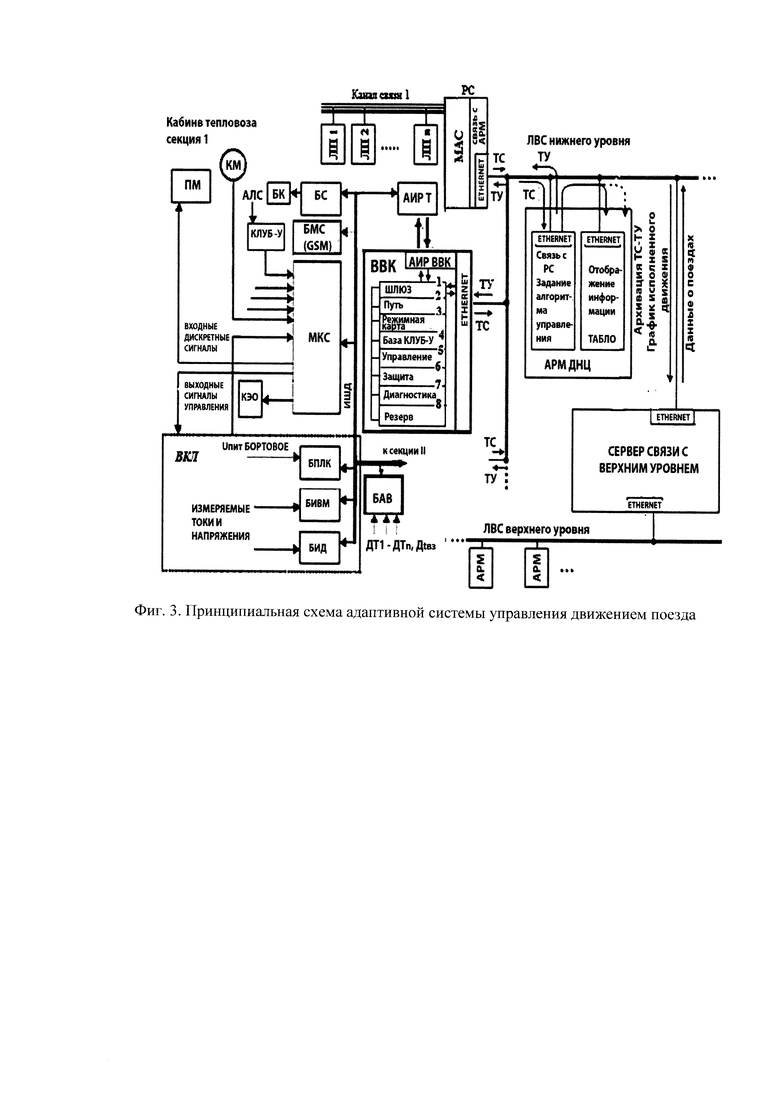
Одновременно с развитием цифровых систем ДЦ на локомотивах получила распространение цифровая система автоведения, назначение которой - управление скоростью движения в соответствии с текущей поездной ситуацией (в соответствии с командами путевых сигналов) или в соответствии с режимной картой [5]. Система работает по алгоритму циклической управляющей программы, которая записана в памяти бортового компьютера. Период выполнения управляющей программы Т1=0,1с. Программа рассчитывает команды управления на энергетическое и вспомогательное оборудование и контролирует нагрузки энергетического и вспомогательного оборудования и работу систем защиты с периодом Т»=0,01с. Взаимодействие ДЦ с системами автоведения локомотивов осуществляется по сети PC и заключается в сборе, обработке и отображении информации о координатах поездов, их номерах, других позициях контроля и передается на сервер ДЦ через блок мобильной связи (БМС) (Фиг. 2).
Системы автоведения могут работать в двух режимах:
• режим автоведения, когда управление локомотивом выполняется по параметрам режимной карты, записанным в памяти бортового процессора;
• режим советчика, когда поездом управляет машинист, а система выводит на экран рекомендации по ведению поезда и отображает текущую информацию о режиме движения.
В частности, для автономных локомотивов (в односекционном или двухсекционном исполнении) разработана система автоведения УСАВП-Т [6,7] (Фиг. 2). Система обеспечивает автоматизированное ведение магистрального тепловоза по текущим показаниям путевых сигналов на основе выбора энергетически рационального режима ведения поезда по расходу топлива с точным соблюдением времени хода. Интегрированная в УСАВП-Т подсистема регистрации параметров РПДА-ТМ обеспечивает сбор, обработку, регистрацию на съемный носитель данных о расходе топлива, работе тепловоза, местоположении, а также их передачу по радиоканалу РОРС-GSM. Открытая архитектура УСАВП-Т и единая информационная шина позволяет расширить функциональные возможности путем добавления функциональных подсистем беспроводной передачи данных.
Формирование команд на управление агрегатами локомотива выполняется в модуле коммутации и сопряжения (МКС) системы автоведения. Функционирование модуля МКС осуществляется от бортового блока питания (БПЛК). Модуль МКС аккумулирует и передает в общую шину данных (ИШД) дискретные сигналы о позиции (пк) от контроллера машиниста (КМ), сигналы комплексного локомотивного устройства безопасности (КЛУБ-У) от автоматической локомотивной сигнализации (АЛС) для управления системой торможения (САУТ), сигналы с датчиков давления воздуха в тормозной системе ДД1-ДД4, сигналы о работе энергетических и вспомогательных систем локомотива от вычислительного комплекса локомотива (ВКЛ).
Одновременно в блоке измерения высоковольтного модульного (БИВМ) в режиме реального времени фиксируются значения нагрузок энергетического и вспомогательного оборудования для работы управляющей программы. В блок аналогового ввода (БАВ) передаются сигналы с датчиков давления в топливной системе дизеля ДТ1-ДТ3 для передачи их в ИШД и далее в диагностический блок (БИД), который сохраняет данные для выполнения контроля и прогноза показателей надежности энергетического оборудования.
CAN-сеть объединяет блоки управления и регистрации УСАВП-Т. Функции шлюза в CAN-сети выполняет центральный блок связи БС, через который передается информация на бортовой компьютер (БК), где записана управляющая программа системы автоведения.
Вся текущая информация о режиме движения сохраняется в блоке регистрации (БР) на съемный накопитель информации (БНИ).
Для соблюдения высоких требований к безопасности движения для управления пневматической системой торможения локомотива выделен независимый канал с пневмодулем (ПМ). Для экстренного торможения блок МКС имеет непосредственный канал связи электропневматическим клапаном (КЭО), который включается по управляющим сигналам от блока КЛУБ-У.
Основными недостатками такой структуры взаимодействия ДЦ и системы автоведения локомотива является организация движения по управляющей программе, записанной в памяти бортового компьютера локомотива, доступ к которой невозможен в режиме движения от АРМ ДНЦ. В результате текущее управление движением поезда со стороны ДЦ осуществляется только сигналами АЛС. Кроме того, система взаимодействия ДНЦ и локомотива имеет низкое быстродействие: при периоде управляющей программы системы автоведения локомотива Т1=0,1с [5] время цикла работы ДНЦ может достигать 5 с при этом с вероятностью 0,1 допускается искажение информации [1].
Недостатком данной системы управления движений поездов является:
- низкий уровень взаимодействия системы автоведения локомотива и сервера ДЦ, который берет на себя функции управления движением поезда в соответствии с сигналами железнодорожной автоматики ЛП (устройств АЛС);
- невозможность изменения алгоритма управления локомотивом, поскольку управляющая программа системы УСАВП-Т недоступна для сервера ДЦ.
- невозможность управления локомотивом в случае сбоя управляющей программы системы автоведения
- низкая эффективность использования свободной мощности сервера ДЦ в системе организации движения при неинтенсивном графике движения поездов.
- невысокое быстродействие и надежность системы, поскольку передача сигналов управления от ДЦ к системе автоведения локомотива осуществляется через промежуточное звено - путевые сигналы железнодорожной автоматики (устройства АЛС), в работе которых не исключен сбой и кратковременный отказ до 15 мин [4].
Аналогичными недостатками обладает двухканальная система для регулирования движения железнодорожных транспортных средств (Пат. № 2726243 Российская Федерация) [8]. Преимуществом системы является то, что она содержит два процессорных комплекта, размещенных в блоке центрального управления, предназначенных для синхронной работы по одинаковым программам, и модуль встроенного аппаратного контроля работы процессорных комплектов, входы/выходы которого подключены к соответствующим выходам/входам процессорных комплектов.
Данная система обеспечивает повышение уровня полноты безопасности функционирования системы ДЦ только за счет резервирования программного обеспечения и не повышает надежность работы существующих устройств железнодорожной автоматики, по которым работает система автоведения локомотива. Кроме того данная система не позволяет при необходимости корректировать управляющую программу системы автоведения локомотива с АРМ ДНЦ, имеет быстродействие прототипа и не эффективно использует свободные вычислительные мощности сервера ДЦ за счет применения горячего резервирования.
Известна комплексная система интервального регулирования движения поездов, включающая микропроцессорную систему централизации стрелок и сигналов, связанная с системой объектных контроллеров и со стационарными техническими средствами цифрового радиоканала для передачи данных к бортовой ЭВМ локомотивов (Пат. № 138441U1 Российская Федерация) [9]. Система снабжена реперными датчиками, расположенными вдоль перегонов, стационарно расположенными радио блок-центром и системой диспетчерской централизации с отображением местоположения поездов в реальном времени. Отличительной особенностью этой системы является то, что бортовая система безопасности снабжена комплексным локомотивным устройством безопасности, включающим автоматическую локомотивную сигнализацию непрерывного действия и электронный локомотивный скоростемер, а радио-блок-центр снабжен терминалом контроля технического состояния устройств.
Предлагаемая система интервального регулирования движения поездов повышает безопасность движения, поскольку КЛУБ-У в непрерывном режиме фиксирует сигналы железнодорожной автоматики и в непрерывном режиме контролирует целостности поезда. Однако структура системы не позволяет с АРМ ДНЦ вносить изменения в алгоритм работы управляющей программы системы автоведения локомотива при изменении поездной ситуации и не эффективно использует вычислительную мощность сервера ДЦ за счет применения сигнализации непрерывного действия.
Известна система управления движением поездов на железнодорожном транспорте, включающая стационарное оборудование и бортовое оборудование поездов (Пат. № ЕА034117 В1 Российская Федерация) [10]. Бортовое оборудование содержит устройство управления и безопасности, подключенное к модулям ГЛОНАСС/GPS приема сигналов автоматической локомотивной сигнализации АЛС, регистрации сигналов датчиков пути и скорости и взаимодействует с модулем радиосвязи и блока единого времени. Система использует три уровня управления и снабжена расположенными вдоль перегонов реперными датчиками. Верхний уровень включает ДЦ, системы диагностики и мониторинга энергоснабжения, железнодорожной автоматики и телемеханики. Средний уровень осуществляет взаимодействие с верхнем и нижним уровнями управления. Нижний уровень управления представляет собой сеть цифровой радиосвязи бортового оборудования каждого поезда и напольного оборудования рельсовых цепей. При использовании этой системы основным режимом управления движением поездов является диспетчерское управление по сигналам АЛС, которое осуществляет безостановочный пропуск поездов по главным и примыкающим к ним боковым путям, а работа в других районах станции осуществляет дежурный по станции. При этом исключаться возможность несанкционированного выхода подвижного состава из других районов станции на маршруты высокоскоростных поездов посредством изоляции от основных приемоотправочных путей охранными стрелками.
Технический результат предлагаемого изобретения заключается в повышении надежности и безопасности управления движением поездов при увеличении пропускной способности, а также сокращении количества напольной инфраструктуры, что позволяет уменьшить стоимость системы.
Основными недостатком данной системы управления являются: низкое быстродействие системы управления по сигналам напольного оборудования рельсовых цепей (АЛС); недостаточный уровень взаимодействия систем ДЦ и автоведения локомотива, что исключает возможность изменения алгоритма работы управляющей программы системы автоведения с АРМ ДНЦ или с сервера ДЦ; низкая эффективность использования свободной мощности сервера ДЦ в задаче управления при неинтенсивном графике движения поездов.
Наиболее близким прототипом является устройство построения прогнозных энергосберегающих графиков движения поездов (Пат. № RU 2685368 С1 Российская Ф) [11]. Устройство содержит блок получения информации о текущем поездном положении и условиях пропуска, блок получения данных нормативного графика движения поездов, средства прокладки ниток поездов, блок формирования энергосберегающего графика движения поездов. Устройство моделирует тяговые режимы поезда при его движении по участку пути на основании данных о планируемых «окнах», графике движения поездов и осуществляет передачу прогнозного графика в систему управления движением поездов.
Техническим результатом, на достижение которого направлено предлагаемое решение, является повышение точности построения графика движения поездов с автоматическим учетом текущей обстановки и условий пропуска поездов, его анализа и получения данных по исполнению графика.
Предлагаемое устройство выполняет следующие функции:
- построение прогнозного энергосберегающего графика движения поездов для заданных участков полигона железной дороги и интервала времени, например построение суточного графика;
- автоматическую передачу полученного прогнозного суточного энергосберегающего графика для исполнения, а также для персонала существующей вертикали управления поездной работой железнодорожного полигона;
- автоматизированную оценку выполнения прогнозного энергосберегающего графика движения поездов, например суточного, и выдачу соответствующих отчетных форм.
К недостаткам устройства построения прогнозных энергосберегающих графиков движения поездов следует отнести следующее:
- не предусмотрено непосредственного взаимодействия устройства построения прогнозных энергосберегающих графиков движения поездов и системы автоведения локомотива через сервер ДЦ с целью изменения алгоритма работы управляющей программы бортового компьютера и изменения критериев оптимизации управления в зависимости от текущей поездной ситуации и сигналов оборудования рельсовых цепей (АЛС);
- низкое быстродействие функционирования устройства построения прогнозных энергосберегающих графиков движения поездов поскольку требует выполнение тяговых расчетов при каждом изменении поезднорй ситуации;
алгоритм работы устройства позволяет рассчитывать только прогнозный энергосберегающий график движения, и не может быть использован для расчета графика движения по другим критериям оптимизации.
Раскрытие изобретения
Техническим результатом изобретения является повышение эффективности и надежности функционирования железнодорожного транспорта путем совершенствования взаимодействия систем ДЦ и автоведения локомотива. Адаптивная система управления поездом позволяет:
1. обеспечить работу системы автоведения локомотива без запаздывания, поскольку информация о текущей поездной ситуации будет поступать непосредственно с сервера ДЦ, а не через промежуточное звено -АЛС, что крайне важно, учитывая механическую инерцию поезда;
2. реализовать непосредственное взаимодействие сервера ДЦ и микропроцессорной системы управления локомотива через виртуальный вычислительный комплекс, развернутый на сервере ДЦ, что позволит ДНЦ в случае необходимости изменять управляющую программу системы автоведения, в частности, для изменения критериев оптимизации движения или отказе отдельных агрегатов локомотива;
3. разделить задачи организации движения, управления локомотивами, контроля действий машинистов и диагностирования состояния локомотивов с целью разграничения доступа к информации и повышения безопасности движения;
4. снизить вероятность потери информации;
5. обеспечить повышенную безопасность управления движением, поскольку штатная система автоведения локомотива будет являться холодным резервом, хотя и с меньшими функциональными возможностями, в общем процессе организации движения;
6. повысить эффективность использования вычислительной мощности сервера ДЦ за счет объединения ресурсов процессора, памяти и дисков аппаратных серверов при решении задачи организации движения [12.
Краткое описание чертежей
Фиг. 1. Принципиальная схема структуры ДЦ
Фиг. 2. Принципиальная схема системы УСАВП-Т
Фиг. 3. Принципиальная схема адаптивной системы управления движением поезда
Осуществление изобретения
Адаптивная система управления поездом предусматривает размещение на главном сервере ДЦ хоста (ВВК) с развернутыми на нем виртуальными вычислительными машинами (1-8) (Фиг. 3). ВВК передаются функции выполнения управляющей программы системы автоведения локомотива для адаптивного управления в условиях параметрической неопределенности внешних воздействий, состояния систем и агрегатов локомотива, текущей поездной ситуации, а системе автоведения локомотива оставлены функции формирования и передачи команд к исполнительны элементам энергетического и вспомогательного оборудования.
На блок ВВК в режиме реального времени по каналам управления ТУ и контроля ТС от АРМ ДНЦ передается текущая оперативная информация, а от системы автоведения локомотива с выходного блока связи AIR-T на входной блок связи AIR ВВК - информация о режимах работы тормозного, энергетического и вспомогательного оборудования локомотива. Канал связи от ВКК организован по сети GSM (блок мобильной связи БМС), а каналом связи от сервера АРМ ДНЦ служит локальная сеть ETHERNET. Блоку БАВ добавлена функция контроля температуры наружного воздуха Дtвз, что важно для управления асинхронным тяговым приводом локомотива, а также диагностирования состояния дизеля.
Связь между линейными пунктами ЛП1-ЛПп и ЛВС нижнего уровня ДЦ осуществляется рабочей станцией связи (PC) через модуль авторизации, контроля и сигнализации (MAC), осуществляющего комплексный контроль связи по кабельным линиям (ETHERNET), мобильной связи средствами (GSM) и спутниковой навигации [13, 14].
Передача информации от ДНЦ на ВВК позволяет рассчитывать команды управления для тормозной системы, энергетического и вспомогательного оборудования локомотива непосредственно при формировании условий поездной ситуации ДЦ, исключая время передачи команды по каналам управления ДЦ до 1,8с, а также вероятность сбоя команд железнодорожной автоматики и напольного оборудования рельсовых цепей [1], что повышает быстродействие управления локомотивом и безопасность движения.
Поскольку ВВК обладает значительными вычислительными ресурсами по сравнению с бортовым компьютером локомотива [12], на его хосте развернуты виртуальные вычислительные машины 1-8, каждая из которых берет на себя функции расчета алгоритма управляющей программы системы автоведения. Вычислительные ресурсы блока ВВК объединены в единую сеть.
Через виртуальную машину «ШЛЮЗ» (1) от блока АИР ВВК и по каналу ETHERNET поступает текущая информация от измерительных блоков системы автоведения и команды от АРМ ДНЦ.
Для расчета оптимального алгоритма управления локомотивом с АРМ ДНЦ в память виртуальной машины «Путь» (2) передается информация о характеристиках участка движения, текущих значениях путевых сигналов, а в память виртуальной машины «График» (3) - рекомендуемый на текущий момент график движения. При необходимости с АРМ ДНЦ информация на виртуальных машинах 2,3 может меняться в режиме реального времени. Виртуальная машина «База Клуб-У» (4) фиксирует и сохраняет текущую информацию о сигналах АЛС, поступающих на локомотив.
По информации виртуальных машин 2-4 виртуальная машина «Управление» (5) рассчитывает оптимальный алгоритм управления локомотивом. Критерии оптимизации могут меняться командами с АРМ ДНЦ. Рассчитанные значения оптимальных режимов работы тормозного, энергетического и вспомогательного оборудования через «ШЛЮЗ» ВВК, блоки АИР ВК - АИР Т по шине ИШД передаются для исполнения в систему автоведения локомотива.
Виртуальная машина «Защита» (6) фиксирует и сохраняет информацию о срабатывании систем защиты локомотива, а виртуальная машина «Диагностика» (7) записывает и сохраняет информацию о работе всех систем локомотива и через «ШЛЮЗ» передает ее на ДЦ, что позволяет уже в процессе движения локомотива установить перечень необходимых работ и сократить время простоя локомотива на внеплановых ремонтах.
В случае отказа любой из виртуальных машин на ВВК предусмотрена виртуальная машина «Резерв» (8), которой передаются функции отказавшей.
В случае отказа ВВК минуя блоки АИР ВК - АИР Т по шине ИШД восстанавливается работа штатной системы автоведения локомотива. Аналогичным образом локомотив может переходить на работу штатной системы автоведения при потере связи с ДЦ или ее отсутствим на участке движения.
Расчеты показали, если вычислительный ресурс ДЦ использует узлы Flex System х240, то его мощности достаточно для обслуживания на сети ж.д. 320 локомотивов с адаптивной системой управления, что соответствует протяженности пути 950 км.
Список источников:
1. О диспетчерской централизации «Сетунь». СЦБИСТ. Информационно-аналитический материал. URL: http://scbist.com/setun/446-o-dispetcherskoi-centralizacii-setun.html. Дата обращения 29.06.2023.
2. Брижак, Е.П. Система телеуправления на железнодорожном транспорте / Е.П. Брижак. М.: Маршрут, 2005. 467 с.
3. Валиев Р.Ш. Возможности системы протоколирования в диспетчерской централизации «Сетунь» / Р.Ш. Валиев, Е.С. Ходневич // Современные информационные технологии, электронные системы и приборы железнодорожного транспорта: Сб. науч. трудов. Екатеринбург: УрГУПС, 2005 . С. 124-132.
4. Новинка диспетчерской централизации - "Сетунь" // Евразия Вести. Дата обращения 29.06.2023, URL: http://eav.ru/publl.php?publid=2004-11а12.
5. Микропроцессорные системы автоматического регулирования электропередачи: Учебное пособие для студентов вузов железнодорожного транспорта/А.В. Грищенко, В.В. Грачев, С.И. Ким, Ю.И. Клименко и др.: Под ред. А.В. Грищенко. М. : Маршрут, 2004-172 с.
6. Универсальная система автоведения магистральных тепловозов УСАВП-Т -ООО «АВП Технология» URL: https://www.avpt.ru/projects/avtovedenie/usavp-t-magistralnykh-teplovozov/ Дата обращения 27.06.2023.
7. Пособие машинисту по эксплуатации системы автоведения магистрального тепловоза ТЭП-70. ООО «АВП Технология» URL: https://www.avpt.ru/upload/USAVP-T.pdf. Дата обращения 27.06.2023.
8. Батраев В.В., Кудряшов С.В., Попов П.А., Розенберг Е.Н., Розенберг И.Н., Шухина Е.Е., Шубинский И.Б.; Двухканальная система для регулирования движения железнодорожных транспортных средств / Пат. № 2726243 Российская Федерация. МПК B61L 27/04 (2006.01) G06F 11/00 (2006.01).
9. Хромушкин К.Д., Павлов Е.В., Романчиков A.M. Комплексная система интервального регулирования движения поездов / Пат. RU 138441 U1 Российская Федерация. МПК B61L 23/18 (2006.01). URL: https://patents.s3.yandex.net/RU138441U1_20140320.pdf. Дата обращения 27.06.2023.
10. Дробышев Н.М., Попов П.А. Система управления движением поездов на железнодорожном транспорте / Пат. ЕА 034117 В1 Евразийское патентное ведомство. МПК B61L 23/18 (2006.01). URL: https://patents.google.com/patent/EA034117B1/ru. Дата обращения 27.06.2023.
11. Лысиков М.Г., Озеров А.В., Ольшанский A.M., Розенберг Е.Н. Устройство построения прогнозных энергосберегающих графиков движения поездов (Пат. RU 2685368 С1 Российская федерация, СПК B61L 27/0055 (2019.02); G06F 17/509 (2019.02). URL: https://patents.google.com/patent/RU2685368C1/ru. Дата обращения 27.06.2023.
12. Виртуализация в высокопроизводительных вычислительных системах [Электронный ресурс] // Наука и Образование: науч.-техн. изд. URL: http://technomag.edu.ru/doc/168323.html. Дата обращения: 28.06.2023).
13. Технические характеристики Бортового контроллера спутниковой системы мониторинга транспорта [Электронный ресурс]. URL: https://mals.su/ssn.html, Дата обращения 27.06.2023.
14. Контроллер МАКС ЛКС [Электронный ресурс]. URL: https://ttronics.ru/products/kontrollery/monitoring-obektov/MAKS-LKS-kontroller. Дата обращения 27.06.2023.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ ТЕХНОЛОГИЧЕСКОЙ ДИСЦИПЛИНЫ ПРОЦЕССА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ (СКТД) | 2005 |
|
RU2307041C1 |
| Интеллектуальный комплекс управления перевозочным процессом городской рельсовой транспортной системы (ГРТС) | 2022 |
|
RU2791353C1 |
| Система диспетчерской централизации железной дороги | 2019 |
|
RU2728199C1 |
| ДИСПЕТЧЕРСКАЯ ЦЕНТРАЛИЗОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА "СЕТУНЬ" | 2016 |
|
RU2628004C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2008 |
|
RU2387564C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ЖЕЛЕЗНОДОРОЖНОМ ТРАНСПОРТЕ | 2019 |
|
RU2723528C1 |
| Система автоматизированного управления движением поездов | 2022 |
|
RU2784101C1 |
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2019 |
|
RU2714966C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ЖЕЛЕЗНОДОРОЖНОМ ТРАНСПОРТЕ | 2018 |
|
RU2683697C1 |
Изобретение относится к области систем управления движением поездов на сети железных дорог (ж.д.) и касается совершенствования алгоритма взаимодействия микропроцессорной системы автоведения локомотива и системы диспетчерской централизации с целью повышения эффективности работы железнодорожного транспорта. Адаптивная система управления движением поезда состоит из микропроцессорной системы автоведения локомотива, диспетчерской централизации и виртуального вычислительного комплекса, развернутого на сервере диспетчерской централизации. Виртуальному вычислительному комплексу передана функция расчета алгоритма управления локомотивом с учетом текущей поездной ситуации, графика движения, сигналов железнодорожной автоматики, параметров поезда, климатических условий. Технический результат заключается в повышении быстродействия и надежности работы системы управления локомотивом с возможностью реализовать наилучший алгоритм движения при заданных условиях эксплуатации. 3 ил.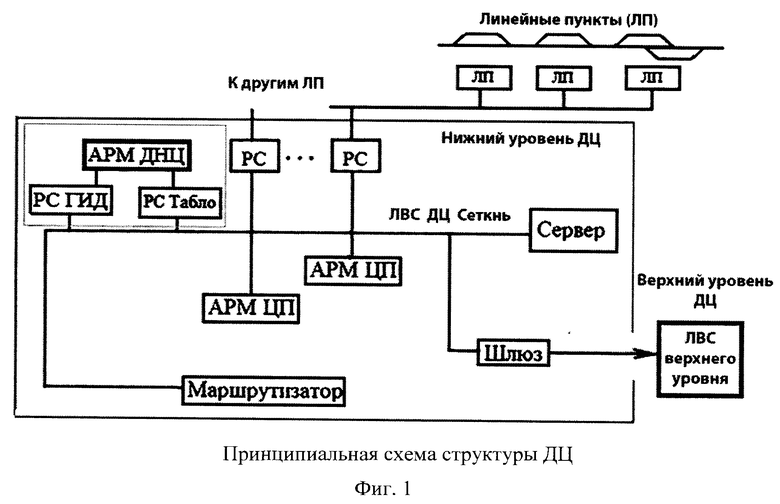
Адаптивная система управления движением поезда, объединяющая бортовую микропроцессорную систему автоведения локомотива и диспетчерскую централизацию, архитектура которой включает нижний уровень, оборудованный автоматизированным рабочим местом поездного диспетчера, имеющим рабочую связь с модулем авторизации, контроля и сигнализации линейных пунктов железной дороги, и верхний уровень с развернутым на главном сервере хоста виртуальным вычислительным комплексом, который имеет связь по локальной сети ETHERNET с каналами управления и контроля автоматизированного рабочего места поездного диспетчера, а по сети мобильной связи СМ - с выходным блоком системы автоведения локомотива, отличающаяся тем, что функции контроля и расчета алгоритма управления движением поезда по любым критериям оптимизации переданы виртуальному вычислительному комплексу, развернутому на сервере диспетчерской централизации, и могут меняться в режиме реального времени с автоматизированного рабочего места диспетчера движения, а системе автоведения локомотива оставлены функции формирования и передачи управляющих сигналов на тормозную систему, энергетическое и вспомогательное оборудование.
| Система автоматизированного управления движением поездов | 2022 |
|
RU2784101C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2012 |
|
RU2519601C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2008 |
|
RU2387564C1 |
| ДИСПЕТЧЕРСКАЯ ЦЕНТРАЛИЗОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА "СЕТУНЬ" | 2016 |
|
RU2628004C1 |
| CN 107231280 A, 03.10.2017 | |||
| Универсальная система автоведения магистральных тепловозов УСАВП-Т (найдено в сети: https://www.avpt.ru/projects/avtovedenie/usavp-t-magistralnykh-teplovozov/), опубликовано 31.03.2023 | |||
| Контроллер МАКС ЛКС | |||

