Область техники, к которой относится изобретение
Изобретение относится к области железнодорожной автоматике и может быть использовано для регулирования движения поездов.
Уровень техники
Известен способ регулирования движения поездов с использованием тональных рельсовых цепей с централизованным размещением оборудования [Типовые материалы для проектирования 410306-ТМП. Автоблокировка с тональными рельсовыми цепями и централизованным размещением оборудования АБТЦ-03. ОАО «РЖД», Филиал института по проектированию сигнализации, централизации, связи и радио на железнодорожном транспорте «ГИДРОТРАНССИГНАЛСВЯЗЬ». 2004 г.]. Информация о состоянии путевых участков формируется с помощью рельсовых цепей и по линейным проводам передается на прилегающие к перегону станции. На подвижной состав информация о состоянии впередилежащих путевых участках передается с помощью напольных светофоров и системы АЛС.
Недостатками способа является отсутствие на локомотиве информации о времени входа поезда на станции и перегоны.
Известен способ регулирования скорости движения поездов, который воплощен в устройстве КЛУБ. Устройство предназначено для повышения безопасности при осуществлении поездной и маневровой работы путем приема сигналов АЛС, отображения их машинисту, измерения и отображения скорости движения, исключения несанкционированного трогания локомотива, контроля скорости движения, контроля торможения перед светофором с запрещающим сигналом, контроля бодрствования и бдительности машиниста, формирования сигналов для системы автоматического управления торможением (САУТ).
Недостатками способа является отсутствие на локомотиве информации о времени входа поезда на станции и перегоны.
Данное техническое решение выбрано в качестве прототипа.
Раскрытие изобретения
Техническим результатом, на достижение которого направлено данное техническое решение, является расширение функциональных возможностей системы, повышение безопасности движения поездов, повышение пропускной способности, снижение потребления электроэнергии и топлива, затрачиваемых на тягу поездов, повышение точности выполнения графика движения поездов, регулирование скорости движения поезда, с учетом времени приема и отправления поездов со станции, которые определяются ЭВМ на посту диспетчерской централизации.
Технический результат достигается за счет способа регулирования движения поездов посредством сигналов, которые передают информацию о состоянии впередилежащих перегонных и станционных путей, установленном маршруте, при этом на локомотивах устанавливают устройства приема и передачи информации на точечные напольные устройства, установленные на границах станций, которые передают на локомотивы информацию о времени приема и отправления поездов со станций, и принимают информацию о номерах поездов на локомотив благодаря полученной информации о состоянии впередилежащих участков, информации, хранящейся в памяти локомотивной ЭВМ, о графике движения поезда и о параметрах пути и поезда, информации о месте нахождения поезда, определенной с помощью навигационных устройств, рассчитывают оптимальную и пониженную кривые скорости, позиции локомотивного контроллера и крана машиниста для каждой точки пути, с учетом фактически сложившейся поездной ситуации, при этом информация о состоянии путевых участков превалирует над временными параметрами приема и отправления поезда.
Описание чертежей
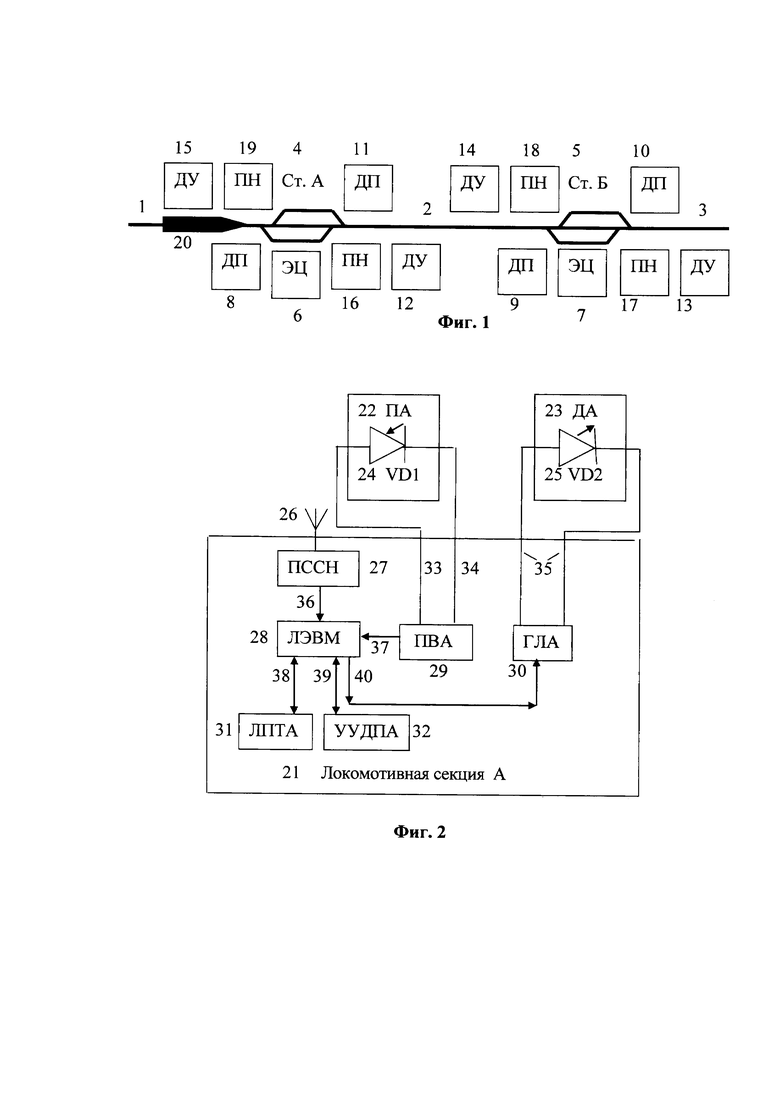
На Фиг. 1 представлены: путевой план участка с датчиками и приемниками сигналов для обмена информацией между подвижным составом и стационарными устройствами; на Фиг. 2 - структурная схема локомотивных устройств; на Фиг. 3 - локомотивный пульт-табло; на Фиг. 4 -структурные схемы подключения стационарных датчиков и приемников сигналов.
На Фиг. 1, 2, 3 и 4 приведены следующие обозначения:
1, 2 и 3 - перегоны;
4 и 5 - ст. А и Б соответственно;
6 и 7 - посты ЭЦ (электрической централизации) ст. А и Б соответственно;
8, 9, 10 и 11 - стационарные датчики сигналов расположенные на участке приближения;
12, 13, 14 и 15 - стационарные датчики сигналов расположенные на участке удаления;
16, 17, 18 и 19 - стационарные приемники номеров поездов;
20 - поезд;
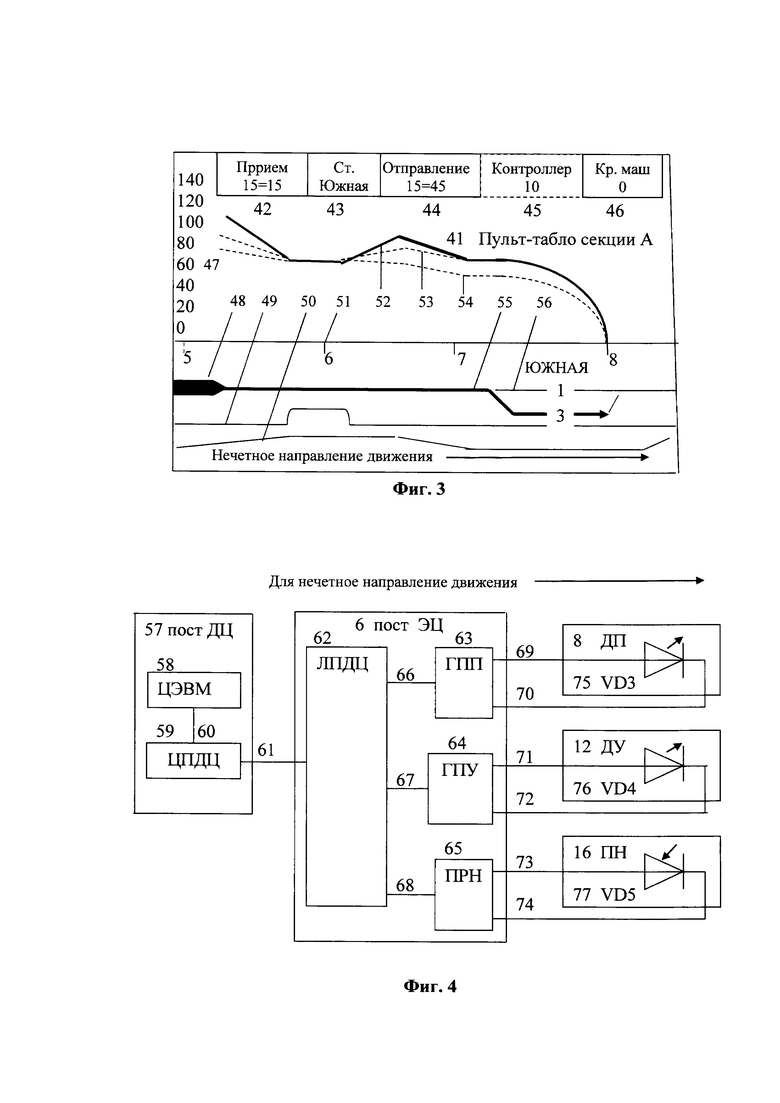
21 - локомотивная секция А;
22 - приемник локомотивной секции А;
23 - датчик локомотивной секции А;
24 - первый диод (фотодиод);
25 - второй диод (светодиод);
26 - локомотивная антенна системы спутниковой навигации;
27 - приемник системы спутниковой навигации;
28 - локомотивная ЭВМ (ЛЭВМ);
29 - приемник временных параметров локомотивной секции А;
30 - двухчастотный локомотивный генератор секции А;
31 - блок локомотивного пульта-табло секции А;
32 - устройство управления движением поезда секции А;
33 - 40 - локомотивные связи между приборами;
41 - локомотивный пульт-табло секции А;
42 - индикатор времени прибытия;
43 - индикатор названия станции;
44 - индикатор времени отправления;
45 - индикатор позиции контроллера;
46 - индикатор позиции крана машиниста;
47 - шкала скорости;
48 - индикатор поезда на пульте табло;
49 - план пути (для ручного управления поездом в нештатной ситуации);
50 - профиль пути (для ручного управления поездом в нештатной ситуации);
51 - километровые метки;
52 - оптимальная кривая скорости;
53 - первая кривая пониженной скорости;
54 - вторая кривая пониженной скорости;
55 - стрелка конца установленного маршрута;
56 - путевое развитие;
57 - пост ДЦ (диспетчерской централизации);
58 - центральная ЭВМ (ЦЭВМ);
59 - центральный пункт диспетчерской централизации;
60 - связь внутри центрального поста диспетчерской централизации;
61 - связь между центральным постом диспетчерской централизации и постом электрической централизации;
62 - линейный пункт диспетчерской централизации;
63 - двухчастотный путевой генератор для передачи информации на участке приближения;
64 - двухчастотный путевой генератор для передачи информации на участке удаления;
65 - приемник номера поезда;
66, 67 и 68 - внутристанционные связи между приборами;
69-72 - кабельные линии связи между постом ЭЦ и стационарными датчиками;
73-74 - кабельная линия связи между постом ЭЦ и стационарным приемником номера поезда;
75 - третий диод (светодиод);
76 - четвертый диод (светодиод);
77 - пятый диод (фотодиод).
Осуществление изобретения
На Фиг. 1 представлен путевой план участка с датчиками и приемниками сигналов для обмена информацией между подвижным составом и стационарными устройствами. При отправлении поезда 20 со ст. 4 в нечетном направлении (слава направо) с точечного датчика 12 на локомотив передается информация о времени подхода поезда к границе ст. 5 (там, где устанавливался входной светофор) и времени подхода к границе пути приема (путь 3 на Фиг. 2 там, где устанавливался выходной светофор). При приеме поезда на ст. 5 в нечетном направлении с точечного датчика 9 на локомотив передается информация о времени пересечения границы ст. 5 и границы пути отправления. Кроме того, при отправлении поезда со ст. 4 приемник 16 принимает с локомотива информацию о номере поезда. Эта информация необходима для восстановления функционирования устройств при сбое в их работе.
Обозначения перегонов 1, 2 и 3, постов ЭЦ 6 и 7 приведено для наглядного представления их расположения. Напольные устройства 8, 10 и 11 функционируют аналогично устройству 9, устройства 13, 14 и 15 - устройству 12, устройства 17, 18 и 19 - устройству 16.
На Фиг. 2 представлена структурная схема локомотивных устройств секции А-21. Локомотивный приемник спутниковой системы навигации 27 посредством антенны 26 принимает сигналы со спутников, которые позволяют определить координаты местонахождения локомотива. Эта информация по связи 37 передаются в локомотивную ЭВМ 28. Сюда же поступает информация о времени приема и отправления поезда с приемника локомотивной секции А 22, в котором используется фотодиод 24. С фотодиода 24 по связям 33 и 34 сигнал поступает на вход приемника временных параметров локомотивной секции А 29, информация с которого по связи 37 поступает на вход локомотивной ЭВМ 28. На основании полученной информации с использованием информации, хранящейся в памяти локомотивной ЭВМ о параметрах пути и информации о состоянии впередилежащих путевых участках, выдается информация на локомотивный пульт-табло 31 по связи 38, устройство управления движением поезда локомотивной секции А 32. На пульте-табло появляется информация о временных параметрах движения поезда (42, 44, 52, 53 и 54) и позициях локомотивного контроллера (десятая, пункт 45 на Фиг. 3) и крана машиниста (нулевая). На устройство управления движением поезда 32 по связи 39 (Фиг. 2) поступает информация для управления локомотивным контроллером и краном машиниста (на фиг. 1-4 не представлены), кроме того поступает информация и на двухчастотный генератор локомотивной секции А 30 по связи 40 о номере поезда. По связям 35 и 36 информация с генератора 30 поступает на локомотивный датчик секции А 23 (Фиг. 2), в котором используется светодиод 25.
На Фиг. 3 изображен локомотивный пульт-табло секции А 41, где представлены индикаторы 42-46, шкала скорости 47, кривые скорости 52, 53 и 54, индикатор поезд 48 и путевые указатели 49 - 51 и 55 и 56. Индикатор поезда 48 отображается неподвижно, кривые скорости 52-54, указатели 49 -51 и 55, 56 непрерывно перемещаются навстречу поезда со скоростью, пропорциональной скорости движения поезда. Кривая 52 представляет оптимальную скорость движения поезда с учетом всех влияющих факторов, кривые 53 и 54 представляют пониженные скорости с учетом прогнозируемого времени приема показанного на индикаторе 42 (15=15) и отправления - на индикаторе 44 (15=45). В верхней части экрана представлена информация о названии станции 44, информация о позициях контроллера и крана машиниста - 45 и 46. В левой части экрана изображена шкала скорости 47, а в нижней - километровые отметки 51, план и профиль 49 и 50, стрелка об установленном маршруте 55, путевое развитии 56.
На Фиг. 4 представлена структурная схема поста ЭЦ 6 с датчиками 8 и 12 и приемником 16, а также устройств поста ДЦ 57 с центральной ЭВМ 58 и центральным постом диспетчерской централизации 59, соединенные связью 60. На центральную ЭВМ 58 передается информация о поездной обстановке на диспетчерском круге, состоянии путевых участков и положении стрелок, что позволяет ей определить время приема и отправления поездов. Центральная ЭВМ 58 управляет работой станций участка посредством центрального поста 59 и линейных пунктов диспетчерской централизации (на фиг. 4 отображены одно устройство 62 со связью 61), кроме того, на линейный пункт диспетчерской централизации передается информация о времени приема и отправления поездов со станций. Линейные пункты диспетчерской централизации по связям 66 и 67 управляют работой двухчастотных генераторов 63 и 64. Генератор 63 по связи 69 и 70 управляет работой датчика 8, установленного на участке приближения, и датчика 12, установленного на участке удаления. Датчик 12 соединен с генератором 64 по линиям связи 71 и 72. Внутри корпусов датчиков установлены светодиоды 75 и 76, которые передают на локомотивы время приема и отправления поездов. По связи 68 линейный пункт диспетчерской централизации 62 соединен с приемником номера поезда 65, который по связям 73 и 74 соединен с приемником номера поезда 16, в корпусе которого установлен фотодиод 77. С помощью фотодиода 77 приемника 65, линейного поста ЭЦ 6, по связи 68, через линейный пункт диспетчерской централизации 62, связь 61, центральный пункт диспетчерской централизации 59, связь 60 передает номер отправленного на перегон поезда в центральную ЭВМ 58. Эта информация уже имеется в центральной ЭВМ, но в случае сбоя системы информация восстанавливается.
Таким образом, на локомотив поступает информация о прогнозном времени приема и отправления поезда со станции, что позволяет локомотивной ЭВМ 28 рассчитать кривые скорости с учетом фактически сложившейся поездной ситуации и управлять устройствами регулирования скорости с учетом рассчитанной прогнозной скорости. При фиксации сближения поездов локомотивная ЭВМ учитывает эту ситуацию и ведет поезд с учетом этого сближения.
Локомотивная ЭВМ рассчитывает скорость движения поезда на перегоне с учетом координаты нахождения поезда, координаты препятствия (граница станции или приемоотправочного пути, если не установлен маршрут, подвижной состав) и времени прибытия на станцию по графику.
Скорость движения по станции локомотивная ЭВМ рассчитывает с учетом крутизны стрелочных переводов в маршруте, наличия подвижных сердечников, протяженности маршрутов приема и отправления. Регулирование скорости поезда осуществляется автоматически, посредством локомотивной ЭВМ и устройств управления локомотивным контроллером и краном машиниста.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2019 |
|
RU2714824C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ПОМОЩЬЮ РАДИОСИГНАЛОВ | 2019 |
|
RU2714962C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ЖЕЛЕЗНОДОРОЖНОМ ТРАНСПОРТЕ | 2019 |
|
RU2723528C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2018 |
|
RU2694679C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ПОЕЗДОВ | 2019 |
|
RU2732670C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2019 |
|
RU2714965C1 |
| КОМПЛЕКСНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2019 |
|
RU2723570C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И МАНЕВРОВЫХ СОСТАВОВ С ПОМОЩЬЮ ЭВМ БЕЗ ОПАСНЫХ ОТКАЗОВ | 2017 |
|
RU2673315C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2020 |
|
RU2730699C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2018 |
|
RU2688552C1 |
Изобретение относится к области железнодорожной автоматики для регулирования движения поездов. В способе на локомотивах устанавливают устройства приема и передачи информации на точечные напольные устройства, установленные на границах станций, которые передают на локомотивы информацию о времени приема и отправления поездов со станций и принимают информацию о номерах поездов, на локомотиве благодаря полученной информации о состоянии впередилежащих участков, информации, хранящейся в памяти локомотивной ЭВМ, о графике движения поезда и о параметрах пути и поезда, информации о месте нахождения поезда, определенной с помощью навигационных устройств, рассчитывают оптимальную и пониженную кривые скорости, позиции локомотивного контроллера и крана машиниста для каждой точки пути с учетом фактически сложившейся поездной ситуации, при этом информация о состоянии путевых участков превалирует над временными параметрами приема и отправления поезда. Достигается расширение функциональных возможностей при регулировании движения поездов. 4 ил.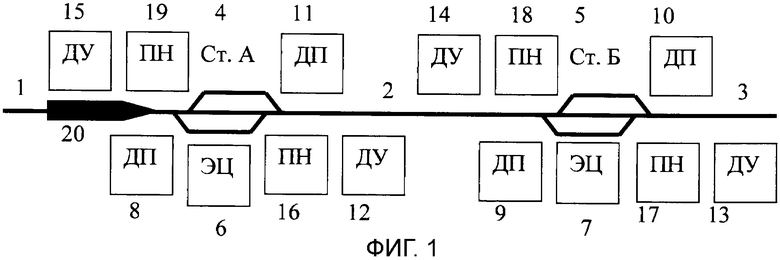
Способ регулирования движения поездов посредством сигналов, которые передают информацию о состоянии впередилежащих перегонных и станционных путей, установленном маршруте, отличающийся тем, что на локомотивах устанавливают устройства приема и передачи информации на точечные напольные устройства, установленные на границах станций, которые передают на локомотивы информацию о времени приема и отправления поездов со станций и принимают информацию о номерах поездов, на локомотиве благодаря полученной информации о состоянии впередилежащих участков, информации, хранящейся в памяти локомотивной ЭВМ, о графике движения поезда и о параметрах пути и поезда, информации о месте нахождения поезда, определенной с помощью навигационных устройств, рассчитывают оптимальную и пониженную кривые скорости, позиции локомотивного контроллера и крана машиниста для каждой точки пути с учетом фактически сложившейся поездной ситуации, при этом информация о состоянии путевых участков превалирует над временными параметрами приема и отправления поезда.
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2017 |
|
RU2652319C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2518670C2 |
| СПОСОБ И КОМПЛЕКСНАЯ СИСТЕМА БЕЗОПАСНОСТИ (КСБ) ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЦЕЛЬНЫМ ТОРМОЖЕНИЕМ ПОДВИЖНОГО СОСТАВА | 2008 |
|
RU2392133C1 |
| СТАНЦИОННОЕ УСТРОЙСТВО ДЛЯ СИСТЕМЫ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2015 |
|
RU2578638C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ | 2007 |
|
RU2420418C2 |
| WO 2007111768 A2, 04.10.2007. | |||

