Область техники, к которой относится изобретение
Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано для регулирования движения поездов.
Уровень техники
Известен способ регулирования движения поездов с использованием тональных рельсовых цепей с централизованным размещением оборудования [Типовые материалы для проектирования 410306-ТМП. Автоблокировка с тональными рельсовыми цепями и централизованным размещением оборудования АБТЦ-03. ОАО «РЖД», Филиал института по проектированию сигнализации, централизации, связи и радио на железнодорожном транспорте «ГИПРОТРАНССИГНАЛСВЯЗЬ» 2004 г.]. Информация о состоянии путевых участков формируется с помощью рельсовых цепей и по линейным проводам передается на прилегающие к перегону станции. На подвижной состав информация о состоянии впередилежащих путевых участках передается с помощью напольных светофоров и системы АЛС.
Недостатками способа является отсутствие на локомотиве информации о времени входа поезда на станции и перегоны.
Известен способ регулирования скорости движения поездов, который воплощен в устройстве КЛУБ. Устройство предназначено для повышения безопасности при осуществлении поездной и маневровой работы путем приема сигналов АЛС, отображения их машинисту, измерения и отображения скорости движения, исключения несанкционированного трогания локомотива, контроля скорости движения, контроля торможения перед светофором с запрещающим сигналом, контроля бодрствования и бдительности машиниста, формирования сигналов для системы автоматического управления торможением (САУТ).
Недостатками способа является отсутствие на локомотиве информации о времени приема и отправления поездов со станции, а также отсутствие иерархических связей между ЭВМ разных уровней управления поездами. Данное техническое решение выбрано в качестве прототипа.
Раскрытие изобретения
Техническим результатом, на достижение которого направлено данное техническое решение, является расширение функциональных возможностей системы, повышение безопасности движения поездов, повышение пропускной способности, снижение затрат электроэнергии на тягу поездов, повышение точности выполнения графика движения поездов, регулирование скорости движения поезда, с учетом времени приема и отправления поезда со станции, которое определяются на едином посту диспетчерской централизации.
Технический результат достигается тем, что способ регулирования движения поездов с помощью сигналов, которые предназначены для передачи информации о состоянии перегонных и станционных путей, установленном маршруте, контроля скорости движения локомотива, отображения информации на локомотивном устройстве контроля, формирования сигналов для регулирования скорости поезда и реализации их за счет локомотивных устройств регулирования скорости. Предусматривается центральная вычислительная машина для коррекции графика движения поездов на сети железных дорог и передачи ее в единые дорожные диспетчерские центры для управления работой дорожных электронно-вычислительных машин, которые корректируют дорожные графики движения поездов и управляют работой электронно-вычислительных машин диспетчерских кругов, которые определяют время приема и отправления поездов и управляют работой станционных электронно-вычислительных машин, которые, совместно с микропроцессорной централизацией, управляют стрелками, формируют сигналы для передачи на локомотивы по радиоканалам об установленных маршрутах, состоянии станционных и перегонных и путевых участков с помощью устройств контроля перегоннов, транслируют информацию о времени приема и отправления поездов со станций. Локомотивные вычислительные машины, с помощью полученной информации, а также информации хранящееся в памяти локомотивной вычислительной машины о параметра пути и поезда, рассчитывают скорость движения поезда и выдают ее на локомотивные устройства контроля, рассчитывают номера позиций контроллера и крана машиниста для каждой точке пути и формируют сигналы для их управления посредством устройств управления контроллером и краном машиниста.
Краткое описание чертежей
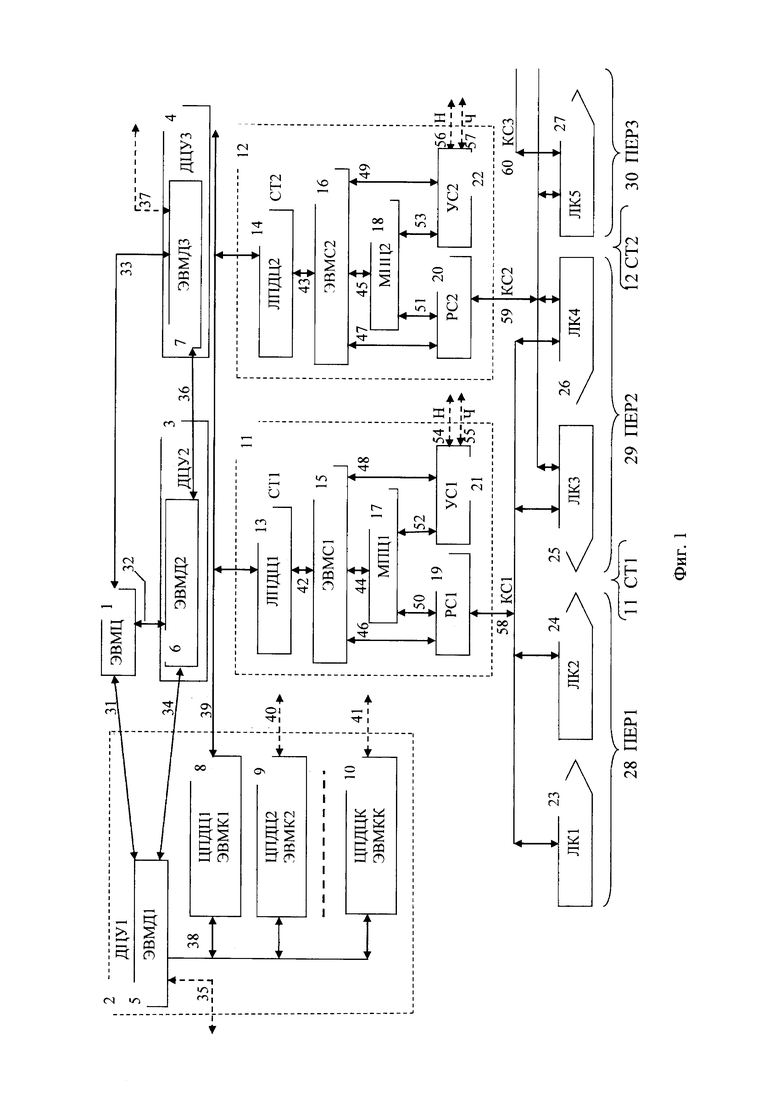
На Фиг.1 представлена иерархическая структурная система комплексной системы регулирования движения поездов для пояснения действия предложенного технического решения.
Осуществление изобретения
Предпосылками к разработке способа регулирования движения поездов являются следующие обстоятельства. На сети железных дорог РФ эксплуатируются следующие системы регулирования движения поездов: на перегоне - автоблокировка АБ; регулирование движения поездов и маневровых составов на станции - электрическая централизация - ЭЦ; регулирования движения поездов на участке диспетчерского круга - диспетчерская централизация ДЦ; системы регулирования скорости поезда СРСП. Системы АБ, ЭЦ, ДЦ и СРСП являются обособленными и различные их модификации могут применяться в разных сочетаниях.
С развитием техники ж.д. автоматики, телемеханики и связи границы между перечисленными системами постепенно стираются. Примерами этому являются системы ЦАБ, КЛУБ, комплекс ДЦ - ЭЦ - АБ - АЛС. В настоящее время назрела необходимость объединения перечисленных систем в единую систему регулирования движения поездов.
В проектных институтах уже десятки лет проектируют устройства автоматики, телемеханики и связи АТС для отдельных участков и целых направлений, при этом предусматриваться различные модификации систем ДЦ, ЭЦ, АБ и АЛС. Перечисленные системы, в большинстве случаев, проектируются микропроцессорные. Для повышения безопасности движения поездов, надежности действия систем, сокращения затрат на строительство и эксплуатацию, сокращение сроков проектирования и строительства упомянутые системы могут быть объединены в единую систему на базе новейших технических решений в области автоматики, телемеханики, связи и микропроцессорной техники с широким применением систем спутниковой навигации.
Действие способа регулирования движения поездов может быть представлено с помощью иерархической структурной схемы системы регулирования движения поездов, которая изображена на фигуре, где приведены следующие обозначения:
1 - электронно-вычислительная машина центрального поста ЭВМЦ;
2 - первый центр дорожного управления движением поездов ДЦУ1;
3 - второй центр дорожного управления движением поездов ДЦУ2;
4 - третий центр дорожного управления движением поездов ДЦУ3;
5 - электронно-вычислительная машина первого дорожного центра ЭВМД 1;
6 - электронно-вычислительная машина второго дорожного центра ЭВМД2;
7 - электронно-вычислительная машина третьего дорожного центра ЭВМД3;
8 - электронно-вычислительная машина ЭВМК1 первого диспетчерского круга (ЦПДЦ1 - центральный пост диспетчерской централизации первого круга);
9 - электронно-вычислительная машина ЭВМК2 второго диспетчерского круга (ДПДЦ2 - центральный пост диспетчерской централизации второго круга);
10 - электронно-вычислительная машина ЭВМК3 третьего диспетчерского круга (ЦПДЦ3 - центральный пост диспетчерской централизации третьего круга);
11 - первая ж.д. станция (микроэлектронные узлы) СТ1;
12 - вторая ж.д. станция (микроэлектронные узлы) СТ2;
13 - линейный пункт диспетчерской централизации первой ж.д. станции ЛПДЦ1;
14 - линейный пункт диспетчерской централизации второй ж.д. станции ЛПДЦ2;
15 - электронно-вычислительная машина первой ж.д. станции ЭВМС1;
16 - электронно-вычислительная машина второй ж.д. станции ЭВМС2;
17 - микропроцессорная централизация первой ж.д. станции МПЦ1;
18 - микропроцессорная централизация второй ж.д. станции МПЦ2;
19 - цифровая радиостанция первой ж.д. станции РС1;
20 - цифровая радиостанция второй ж.д. станции РС2;
21 - устройство сопряжения перегона с первой ж.д. станцией УС1;
22 - устройство сопряжения перегона со второй ж.д. станцией УС2;
23 - первый локомотив ЛК1;
24 - второй локомотив ЛК2;
25 - третий локомотив ЛК3;
26 - четвертый локомотив ЛК4;
27 - пятый локомотив ЛК5;
28 - первый перегон (микроэлектронные узлы) ПЕР1;
29 - второй перегон (микроэлектронные узлы) ПЕР2;
30 - третий перегон (микроэлектронные узлы) ПЕР3.
На фигуре, кроме того, приведены обозначения двухсторонних связей между устройствами:
31 - между ЭВМЦ и ЭВМД 1;
32 - между ЭВМЦ и ЭВМД2;
33 - между ЭВМЦ и ЭВМД3;
34 - между ЭВМД1 и ЭВМД2;
35 - между ЭВМД1 и ЭВМД предыдущего дорожного центра управления;
36 - между ЭВМД2 и ЭВМД3;
37 - между ЭВМД3 и ЭВМД последующего центра управления;
38 - между ЭВМД1 и ЭВМК1, ЭВМК2, ЭВМК3;
39 - между ЦПДЦ1 и линейными пунктами диспетчерской централизации первого круга ЛПДЦ1, ЛПДЦ2;
40 - между ЛПДЦ2 и линейными пунктами диспетчерской централизации второго круга;
41 - между ЛПДЦК и линейными пунктами диспетчерской централизации К-ого круга;
42 - между ЛПДЦ1 и ЭВМС1;
43 - между ЛПДД2 и ЭВМС2;
44 - между ЭВМС1 и МПЦ1;
45 - между ЭВМС2 и МПЦ2;
46 - между ЭВМС1 и PC1;
47 - между ЭВМС2 и РС2;
48 - между ЭВМС 1 и УС1;
49 - между ЭВМС2 и УС2;
50 - между МПЦ1 иРС1;
51 - между МПЦ2 и РС2;
52 - между МПЦ1 и УС1;
53 - между МПЦ2 и УС2;
54 - между УС1 и линейными установками (ранее они назывались сигнальными точками) перегона с нечетной стороны станции;
55 - между УС1 и линейными установками (ранее они назывались сигнальными точками) перегона с четной стороны станции;
56 - между УС2 и линейными установками (ранее они назывались сигнальными точками) перегона с нечетной стороны станции;
57 - между УС2 и линейными установками (ранее они назывались сигнальными точками) перегона с четной стороны станции;
58 - первый канал связи между РС1 и радиостанциями локомотивов 23, 24, 25 и 26;
59 - второй канал связи между РС2 и радиостанциями локомотивов 25, 26 и 27;
60 - третий канал связи между радиостанцией следующей ж.д. стации и локомотивом 27.
Действие способа осуществляется следующим образом. Центральная электронно-вычислительная машина ЭВМЦ1 содержит и корректирует (с участием оператора) информацию о графиках движения всех поездов железных дорог РФ. Эта ЭВМ по связям 31, 32 и 33 осуществляет управление и контроль электронно-вычислительной машины ЭВМД1 5 первого диспетчерского центра управления ДЦУ1 2, электронно-вычислительной машины ЭВМД2 6 второго диспетчерского центра управления ДЦУ2 3, электронно-вычислительной машины ЭВМД3 7 третьего диспетчерского центра управления ДЦУ3 4 соответственно. Электронно-вычислительная машина ЭВМД1 осуществляет управление и контроль по связи 38 с машинами ЭВМД2 и ЭВМД3 электронно-вычислительными машинами центральных постов диспетчерской централизации ЭВМК1 8 (первый диспетчерский круг ЦПДЦ1), ЭВМК2 9 (второй диспетчерский круг ЦПДЦ2), … ЭВМКК 10 (К-тый диспетчерский круг ЦПДЦ1). Электронно-вычислительные машины центральных постов диспетчерской централизации ЭВМК1, ЭВМК2, ЭВМКК по связям 39, 40, 41 управляют и контролируют первый линейный пункт диспетчерской централизации ЛПДЦ1 13 первой станции 11, второй линейный пункт диспетчерской централизации ЛПДЦ2 14 второй станции 12 и т.д. Первый линейный пункт диспетчерской централизации ЛПДД1 13 по связи 42 управляет и контролирует электронно-вычислительную машину ЭВМС1 15, второй линейный пункт диспетчерской централизации ЛПДЦ2 14 по связи 43 управляет и контролирует электронно-вычислительную машину ЭВМС2 16. Электронно-вычислительная машина ЭВМС1 15 по связям 46, 44, 48 управляет и контролирует радиостанцию РС1 19, микропроцессорную централизацию МПЦ1 17, устройство сопряжения УС1 21 соответственно. Электронно-вычислительная машина ЭВМС2 по связям 47, 45, 49 управляет и контролирует радиостанцию РС2 20, микропроцессорную централизацию МПЦ2 18, устройство сопряжения УС2 22 соответственно. Микропроцессорная централизация МПЦ1 17 по связям 50, 52 управляет и контролирует радиостанцию РС1 19, устройство сопряжения УС1 21 соответственно. Микропроцессорная централизация МПЦ2 18 по связям 51, 53 управляет и контролирует радиостанцию РС2 20, устройство сопряжения УС2 22 соответственно. Радиостанция РС1 19 по каналу связи КС1 58 управляет и контролирует локомотивы ЛК1 23, ЛК2 24, ЛК3 25, ЛК4 26. Радиостанция РС2 20 по каналу связи КС2 59 управляет и контролирует локомотивы ЛК3 25, ЛК4 26, ЛК5 27. Управление и контроль локомотивом ЛК5 27 осуществляется по каналу связи КС3 60. Локомотивы ЛК1 23, ЛК2 24 находятся на первом перегоне ПЕР1 28, локомотивы ЛК3 25, ЛК4 26 находятся на втором перегоне ПЕР2 29, локомотив ЛК5 27 находятся на третьем перегоне ПЕР3 30. На первой ступени иерархической структуры находится ЭВМЦ, на второй - ЭВМД, на третьей - ЭВМС, на четвертой - ЭВМЛ (последняя на фигуре не показана).
Центральная ЭВМЦ предназначена для коррекции графиков поездов в соответствии с потребностями в перевозках народно-хозяйственных грузов и пассажиров, новым строительством и реконструкцией железных дорог, обновлением подвижного состава, и др. Скорректированные графики передаются на дорожные ЭВМД, которые получают новую информацию от ЭВМЦ и корректируют дорожные графики в соответствии со складывающейся поездной ситуацией, обмениваются информацией с ЭВМД смежных дорог, воздействуют на ЭВМ диспетчерских кругов ЭВМК соответствующей дороги. ЭВМК использует полученную информацию для регулирования движения поездов с указанием времени приема и отправления поездов со станций, и передают обновленную информацию на станционные ЭВМС, которые управляют стрелками посредством системы электрической централизации ЭЦ. Так же они передают на локомотивы информацию о времени приема и отправления поездов со станций с учетом исполненного графика движения поездов посредством радиостанций PC, отслеживают передвижение поездов. Локомотивные электронно-вычислительные машины ЭВМЛ воспринимают информацию с ЭВМС ближайших станций о состоянии путевых участков станций и перегонов, установленных маршрутах, времени приема и отправления поездов со станций, а также информацию со спутниковой навигационной системы о местонахождении локомотива. Информация о местонахождении локомотивов по каналам связи передается на ближайшие станции. Кроме того, ЭВМЛ определяет оптимальную скорость движения поезда с учетом информации с ЭВМС, управляет локомотивным контроллером и краном машиниста посредством устройств управления контроллером и краном машиниста УУКК. Полученная информация с ЭВМЛ на станциях дополняется информацией о состоянии напольных устройств (стрелок и путевых участков) и передается со станционных ЭВМС через устройства ЛПДЦ на ЦПДЦ (ЭВМК), ЭВМД и ЭВМЦ.
Для управления напольными станционными объектами (стрелками) со станционного пульта-табло, а также с пульта-табло поездного диспетчера оба пульта модифицированы. На них нет повторителей светофоров (светофоров нет вообще). Свободные и занятые участки пути обозначаются различными цветами, установленные маршруты обозначаются стрелками по трассе маршрутов (по аналогии с обычным пультом), кроме того, указано время приема и отправления поездов. На локомотиве также предусматривается пульт-табло с обозначением состояния впередилежащих путевых участков, конфигурации маршрута, времени приема и отправления поезда (локомотива). В памяти локомотивной ЭВМЛ хранится информация о путевом развитии всего участка следования локомотива, плане и профиле пути, прогнозном графике движения поезда. При подаче локомотива под состав в ЭВМЛ вводится информация о параметрах поезда. С учетом перечисленных параметров ЭВМЛ рассчитывает оптимальную скорость движения поезда для каждой точке пути, а на локомотивный пульт-табло выводится кривая скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ПОЕЗДОВ | 2019 |
|
RU2732670C1 |
| КОМПЛЕКСНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2019 |
|
RU2723570C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2018 |
|
RU2694679C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ ДИСПЕТЧЕРСКОГО КРУГА | 2018 |
|
RU2683978C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ БЕЗ НАПОЛЬНЫХ УСТРОЙСТВ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ | 2019 |
|
RU2712364C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПАКЕТНЫХ ПОЕЗДОВ | 2022 |
|
RU2781700C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2020 |
|
RU2732181C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ИСПОЛЬЗОВАНИЕМ РАДИОСВЯЗИ | 2018 |
|
RU2698966C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2018 |
|
RU2688552C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2020 |
|
RU2730699C1 |
Изобретение относится к области железнодорожной автоматики. Способ предусматривает центральную вычислительную машину (ЭВМЦ) для коррекции графика движения поездов на сети железных дорог. Графики передают в единые дорожные диспетчерские центры для управления работой дорожных ЭВМ (ЭВМД). ЭВМД корректируют дорожные графики движения поездов и управляют работой ЭВМ диспетчерских кругов (ЭВМК). ЭВМК определяют время приема и отправления поездов и управляют работой станционных ЭВМ (ЭВМС). ЭВМС совместно с микропроцессорной централизацией управляют стрелками, формируют сигналы для передачи на локомотивы по радиоканалам об установленных маршрутах, состоянии путевых участков с помощью устройств контроля перегонов, транслируют информацию о времени приема и отправления поездов со станций. Локомотивные вычислительные машины рассчитывают скорость движения поезда и выдают ее на локомотивные устройства контроля, рассчитывают номера позиций контроллера и крана машиниста для каждой точки пути и формируют сигналы для их управления посредством устройств управления контроллером и краном машиниста. Достигается повышение безопасности движения поездов, повышение пропускной способности, снижение затрат электроэнергии на тягу поездов, повышение точности выполнения графика движения, регулирование скорости движения поезда с учетом времени приема и отправления со станции. 1 ил.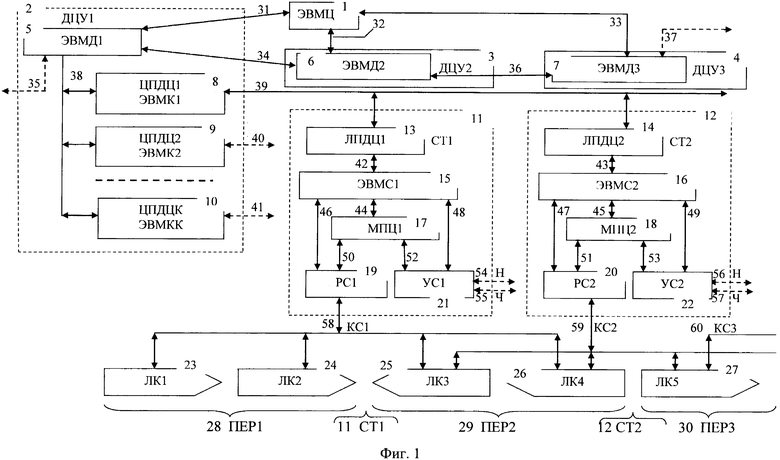
Способ регулирования движения поездов посредством сигналов, предназначенных для передачи информации о состоянии перегонных и станционных путей, установленном маршруте, контроля скорости движения локомотива, отображения информации на локомотивном устройстве контроля, формирования сигналов для регулирования скорости поезда и реализации их за счет локомотивных устройств регулирования скорости, отличающийся тем, что предусматривают центральную вычислительную машину для коррекции графика движения поездов на сети железных дорог и передачи ее в единые дорожные диспетчерские центры для управления работой дорожных электронно-вычислительных машин, которые корректируют дорожные графики движения поездов и управляют работой электронно-вычислительных машин диспетчерских кругов, которые определяют время приема и отправления поездов и управляют работой станционных электронно-вычислительных машин, которые совместно с микропроцессорной централизацией управляют стрелками, формируют сигналы для передачи на локомотивы по радиоканалам об установленных маршрутах, состоянии станционных и перегонных путевых участков с помощью устройств контроля перегонов, транслируют информацию о времени приема и отправления поездов со станций, при этом локомотивные вычислительные машины посредством полученной информации, а также информации, хранящейся в памяти локомотивной вычислительной машины о параметрах пути и поезда, рассчитывают скорость движения поезда и выдают ее на локомотивные устройства контроля, рассчитывают номера позиций контроллера и крана машиниста для каждой точки пути и формируют сигналы для их управления посредством устройств управления контроллером и краном машиниста.
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И МАНЕВРОВЫХ СОСТАВОВ С ПОМОЩЬЮ ЭВМ БЕЗ ОПАСНЫХ ОТКАЗОВ | 2017 |
|
RU2673315C1 |
| Диффузионный нож для получения свекловичной стружки | 1952 |
|
SU94939A1 |
| US 7539624 B2, 26.05.2009 | |||
| JP 2005138710 A, 02.06.2005. | |||

