Настоящая группа изобретений относится к устройствам и методам низкочастотного электромагнитного (ЭМ) зондирования земли с использованием активных (контролируемых) и естественных источников ЭМ полей и может применяться, в частности, при поиске рудных полезных ископаемых, а также нефти и газа на морском шельфе.
Хорошо известен способ магнитотеллурического и аудиомагнитотеллурического зондирования (МТЗ и МТ-АМТ) как в наземном [1], так и в морском [2] вариантах. Способ основан на том, что измеряют горизонтальные электрические и магнитные компоненты электромагнитного поля в заданных точках исследуемого региона, создаваемого естественными источниками. Основные типы МТ-АМТ-полей: геомагнитные бури и суббури, солнечные суточные вариации, бухтообразные возмущения магнитного поля Земли, геомагнитные пульсации или короткопериодные колебания, а также высокочастотные вариации, называемые иначе атмосфериками, связанные с грозовыми полями. Измерения осуществляют на поверхности земли в наземном варианте и на дне акватории в морском варианте. Для измерений электромагнитных полей на дне используют специальные донные электроразведочные станции (донный модуль), оборудованные широкополосными индукционными датчиками магнитного поля и контактными (электродными) датчиками электрического поля. Затем определяют поверхностные импедансы в заданных точках как отношение горизонтального электрического поля в одном направлении к горизонтальному магнитному полю в перпендикулярном направлении. Такой способ расчета позволяет исключить временную зависимость зондирующего поля, оставив только отклик подстилающей проводящей среды. И, наконец, по измеренным значениям импеданса в заданных точках в зависимости от частоты судят о строении геоэлектрического разреза в зависимости от глубины.
При измерениях на поверхности земли информация о геологическом строении подстилающей поверхности содержится только в горизонтальном электрическом поле. Магнитное поле измеряется только для нормировки и исключения влияния нестационарности шума на результаты измерений. По этой причине, а также для ослабления влияния ближних помех при проведении МТЗ и МТ-АМТ используются измерения с «удаленной базовой точкой», когда измерения магнитного поля проводятся в одной точке и обеспечивают массив измерений электрического поля на целой площадке [4].
При проведении морского аудиомагнитотеллурического зондирования ситуация существенно сложнее. В этом случае импеданс морского дна формируется за счет отражения зондирующего поля (естественный шум), падающего из морской воды на дно. При этом проводимость верхней среды (морская вода) значительно больше проводимости дна. Здесь ситуация противоположна наземному случаю, и информация о строении морского дна может содержаться в измерениях как электрического, так и магнитного поля в зависимости от глубины моря.
Также известен способ частотного зондирования [3], в котором, в отличие от метода МТ3-МТ-АМТ, в качестве зондирующего поля используется искусственный (контролируемый) источник, как правило, в виде заземленной линии (электрический диполь) или незаземленной петли (магнитный диполь). Измерение электрических и (или) магнитных полей осуществляется на определенном (заданном) расстоянии от источника в зависимости от частоты.
Известен метод импедансных частотных зондирований (ИЧЗ) или CSAMT (Controlled-Sourse Audio-frequency Magneto Tellurics), описанный в источнике [3], который возник на стыке методов МТ3-МТ-АМТ и частотного зондирования (43) и в последнее время получил широкое развитие в задачах ЭМ зондирования Земли [4]. Здесь, как и в методе 43, ЭМ поле создается с помощью заземленной линии или замкнутой петли. Измерения ЭМ полей для определения импеданса в зависимости от частоты осуществляются на расстояниях, где выполняется приближение плоской «волны» (импедансные граничные условия или граничные условия Леонтовича). За счет использования искусственного источника повышается точность измерений. При этом применяется хорошо развитая методика интерпретации МТ-АМТ данных. Метод CSAMT наиболее удобен при малоглубинных исследованиях, поскольку в этом случае импедансные граничные условия будут выполняться на меньших расстояниях от источника, что позволяет использовать в работе генераторы меньшей мощности.
При использовании способа CSAMT в морском варианте требуется одновременное использование, включая установку на дно моря и подъем на борт специального судна, большого количества дорогостоящих донных МТ-АМТ станций [2].
Прототипы для разработанных способа морского импедансного частотного зондирования, способа морского аудиомагнитотеллурического зондирования, а также для комплексов, которые реализуют эти способы, описаны в источнике [4].
По известному способу морского импедансного частотного зондирования, взятого за прототип, определяют донный импеданс в заданной области акватории путем определения горизонтальных ортогональных векторов электрического и магнитного полей от контролируемого источника, находящегося на поверхности моря, в нескольких точках дна заданной области акватории. Для этого в каждую такую точку опускают донные МТ-АМТ станции. Для реализации этого известного способа используют устройство, взятое за прототип разрабатываемого комплекса для морского импедансного частотного зондирования. Устройство-прототип содержит контролируемый источник зондирующего сигнала, находящийся на поверхности моря, донные МТ-АМТ станции, снабженные датчиками, измеряющими электрическое поле от контролируемого источника, системами позиционирования, датчиками магнитного поля и системами сбора данных, и расположенные в нескольких точках дна заданной области акватории.
По известному способу морского аудиомагнитотеллурического зондирования, взятого за прототип, определяют донный импеданс в заданной области акватории путем определения горизонтальных ортогональных векторов электрического и магнитного поля от естественного источника в нескольких точках дна заданной области акватории. Для этого в каждую такую точку опускают донные МТ-АМТ станции. Для реализации этого известного способа используют устройство, взятое за прототип разрабатываемого комплекса для морского аудиомагнитотеллурического зондирования. Устройство-прототип содержит донные МТ-АМТ станции, снабженные датчиками, измеряющими электрическое поле от естественного источника, системами позиционирования, датчиками магнитного поля и системами сбора данных, и расположенные в нескольких точках дна заданной области акватории.
Недостатками известных способов зондирования является необходимость доставлять донные станции к месту исследований, размещать их на дне акватории с последующим подъемом. Для получения информации на большой площади требуется от нескольких десятков штук таких станций. Таким образом, известные устройства-прототипы включают в свой состав несколько десятков донных станций, каждая из которых является дорогостоящим прибором.
Задачей, на решение которой направлена предлагаемая группа изобретений, является снижение трудоемкости морских работ и стоимости используемого оборудования.
Технический результат в части способа морского импедансного частотного зондирования достигается за счет того, что разработанный способ, как и способ-прототип, включает определение донного импеданса в заданной области акватории путем определения горизонтальных ортогональных векторов электрического и магнитного полей от контролируемого источника в к точках дна заданной области акватории. Новым является то, что используют единственную автономную донную МТ-АМТ станцию и (к - 1) пар электродов в измерительных косах, расположенных на дне акватории, измеряют глубину моря и вертикальный профиль проводимости морской воды в местах расположения донной МТ-АМТ станции и измерительных кос, а также координаты этих точек, калибруют контролируемый источник, вычисляя магнитное поле на поверхности моря над донной МТ-АМТ станцией, затем вычисляют распределение магнитного поля на поверхности моря над каждой парой электродов, при этом измеряют распределение электрического поля на дне вдоль косы, преобразуют двухточечную краевую задачу по определению донного магнитного поля в задачу Коши и вычисляют распределение магнитного поля на дне в местах расположения каждой пары электродов.
Технический результат в части комплекса для морского импедансного частотного зондирования достигается за счет того, что разработанный комплекс, как и комплекс-прототип, содержит контролируемый источник зондирующего сигнала, находящийся на поверхности моря, устройства измерения, снабженные датчиками, измеряющими электрическое поле от контролируемого источника, и расположенные в к точках дна заданной области акватории, причем устройство измерения, являющееся донной МТ-АМТ станцией, дополнительно снабжено системой позиционирования, датчиками магнитного поля и системой сбора данных. Новым является то, что устройства измерения представляют собой одну донную МТ-АМТ станцию и (к - 1) пар электродов измерительных кос. Причем донная МТ-АМТ станция дополнительно снабжена датчиком глубины, датчиком проводимости морской воды, а также вертикальной кабельной линией с буем, с размещенными на ней несколькими датчиками глубины и проводимости морской воды, при этом каждая измерительная коса содержит систему сбора данных и по крайней мере один комплект, состоящий из системы позиционирования, датчика глубины и датчика проводимости морской воды.
В частном случае реализации комплекса для морского импедансного частотного зондирования каждая измерительная коса содержит два комплекта, состоящих из системы позиционирования, датчика глубины и датчика проводимости морской воды и находящихся на противоположных концах измерительной косы.
В другом частном случае реализации комплекса для морского импедансного частотного зондирования каждая пара электродов измерительных кос содержит один комплект, состоящий из системы позиционирования, датчика глубины и датчика проводимости морской воды.
Технический результат в части способа морского аудиомагнитотеллурического зондирования достигается за счет того, что разработанный способ, как и способ-прототип, включает определение донного импеданса в заданной области акватории путем определения горизонтальных ортогональных векторов электрического и магнитного полей от естественного источника в к точках дна заданной области акватории. Новым является то, что используют единственную автономную донную МТ-АМТ станцию и (k - 1) пар электродов в измерительных косах, расположенных на дне акватории, измеряют глубину моря и вертикальный профиль проводимости морской воды в местах расположения донной МТ-АМТ станции и измерительных кос, а также координаты этих точек, вычисляют магнитное поле на поверхности моря над донной МТ-АМТ станцией, принимают распределение магнитного поля на поверхности моря над каждой парой электродов равным магнитному полю на поверхности моря над донной МТ-АМТ станцией, при этом измеряют распределение электрического поля на дне вдоль косы, преобразуют двухточечную краевую задачу по определению донного магнитного поля в задачу Коши и вычисляют распределение магнитного поля на дне в местах расположения каждой пары электродов.
Технический результат в части комплекса для морского аудиомагнитотеллурического зондирования достигается за счет того, что разработанный комплекс, как и комплекс-прототип, содержит устройства измерения, снабженные датчиками, измеряющими электрическое поле от естественного источника, и расположенные в к точках дна заданной области акватории, причем устройство измерения, являющееся донной МТ-АМТ станцией, дополнительно снабжено системой позиционирования, датчиками магнитного поля и системой сбора данных. Новым является то, что устройства измерения представляют собой одну донную МТ-АМТ станцию и (k - 1) пар электродов измерительных кос, причем донная МТ-АМТ станция дополнительно снабжена датчиком глубины, датчиком проводимости морской воды, а также вертикальной кабельной линией с буем, с размещенными на ней несколькими датчиками глубины и проводимости морской воды, при этом каждая измерительная коса содержит систему сбора данных и по крайней мере один комплект, состоящий из системы позиционирования, датчика глубины и датчика проводимости морской воды.
В частном случае реализации комплекса для морского аудиомагнитотеллурического зондирования каждая измерительная коса содержит два комплекта, состоящих из системы позиционирования, датчика глубины и датчика проводимости морской воды и находящихся на противоположных концах измерительной косы.
В другом частном случае реализации комплекса для морского аудиомагнитотеллурического зондирования каждая пара электродов измерительных кос содержит один комплект, состоящий из системы позиционирования, датчика глубины и датчика проводимости морской воды.
Разработанные способы и устройства поясняются следующими фигурами.
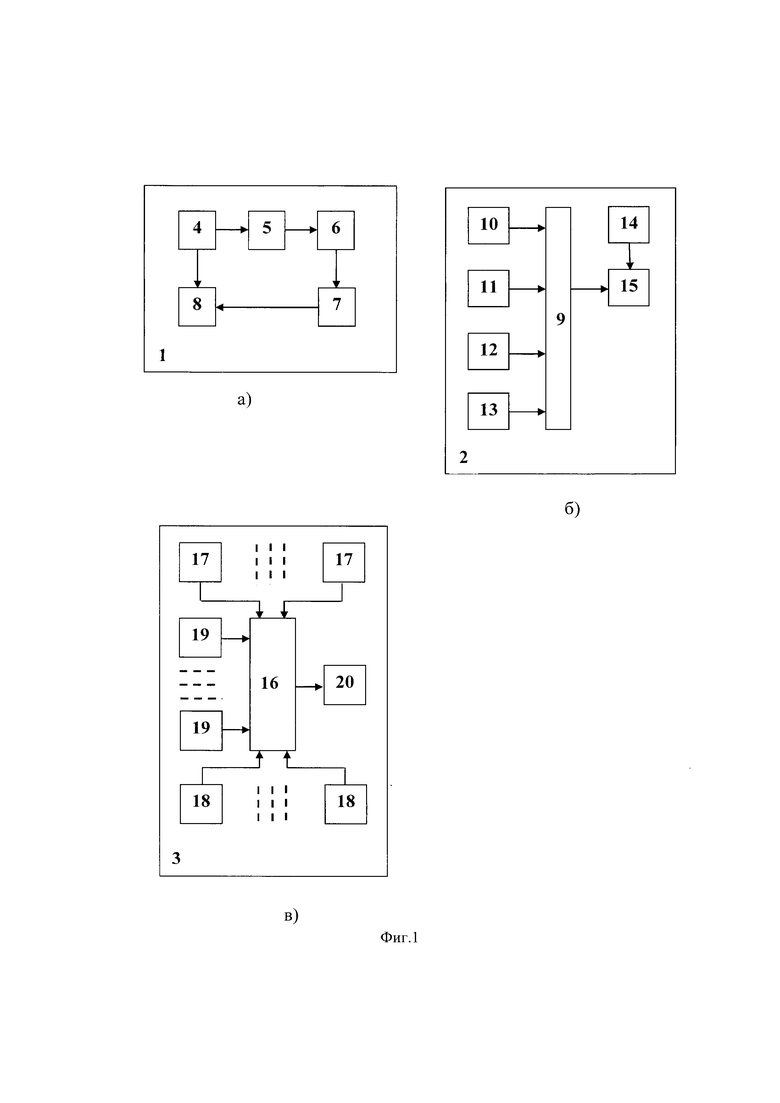
На фиг. 1 представлен вариант блок-схемы устройства, реализующего способ морского импедансного частотного зондирования: а) блок формирования и передачи зондирующего сигнала, б) блок калибровки зондирующего сигнала, в) блок приема.
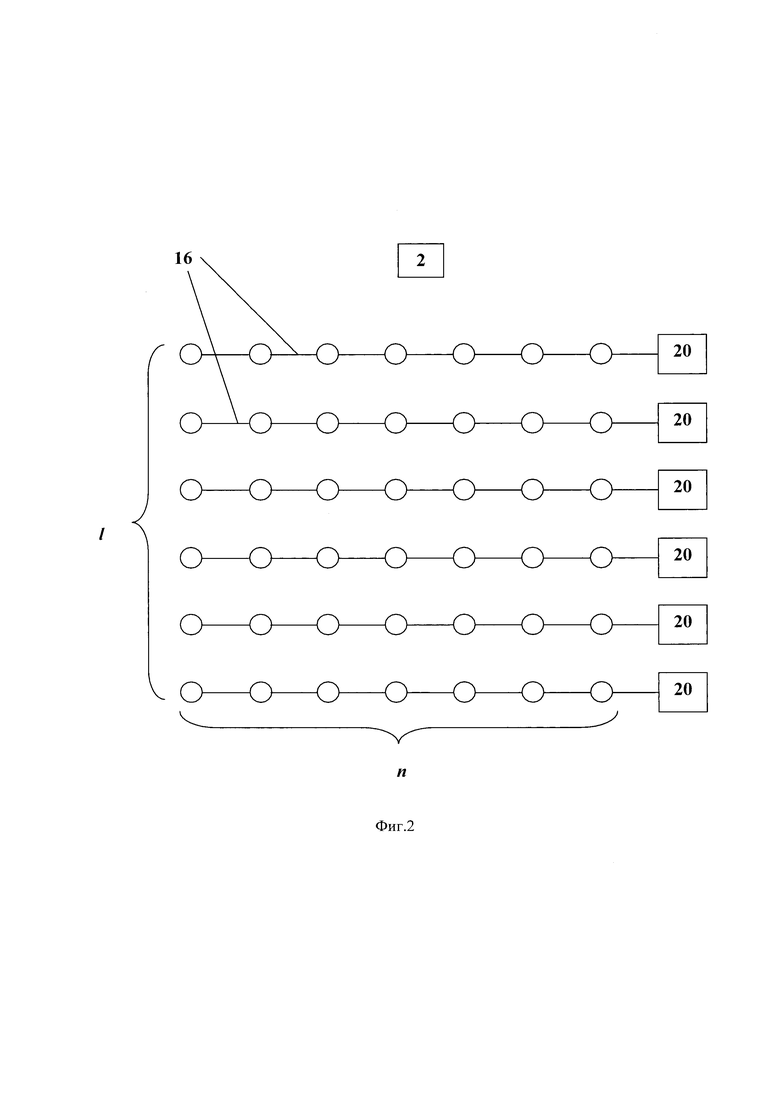
На фиг. 2 приведен пример размещения на дне моря измерительного оборудования: линейная укладка кос, когда они ориентированы в одном направлении (вид сверху).
На фиг. 3 приведена схема укладки одной измерительной косы на дне моря (вид
сбоку).
На фиг. 1 представлен вариант блок-схемы разработанного устройства в виде комплекса, реализующего заявленный способ морского импедансного частотного зондирования поп.1. Комплекс содержит блок 1, образующий канал формирования и передачи зондирующего сигнала, блок 2, образующий канал калибровки зондирующего сигнала и блок 3, образующий несколько каналов приема. Блок 1 размещается на специальном корабле и включает в себя последовательно соединенные программатор 4, генератор 5, антенну 6 с системой позиционирования 7 и систему сбора данных 8. Блок 2 представляет собой автономную донную МТ-АМТ станцию 9 с двумя широкополосными индукционными магнитными датчиками, измеряющими две ортогональные компоненты горизонтального магнитного поля 10 и двумя ортогональными контактными (электродными) датчиками электрического поля 11. На платформе донной станции 9 размещены также датчики глубины 12, проводимости морской воды 13, система позиционирования 14 и система сбора данных 15. Дополнительно донная станция 9 снабжена вертикальной кабельной линией с буем (на фиг. 1 не показана), на которой в нескольких точках совместно размещены датчик глубины и датчик проводимости морской воды для контроля глубинного профиля проводимости. Количество точек выбирается исходя из необходимой точности измерения глубинного профиля проводимости, как правило, не менее трех. Блок 3 содержит l особым образом разложенных на дне длинных измерительных кос 16, каждая из которых включает п пар заземляющих электродов, общее количество пар заземляющих электродов (k-1). На фиг. 2 приведен пример размещения на дне моря измерительного оборудования: показана линейная укладка кос 16, когда они ориентированы в одном направлении. Конкретная конфигурация размещения кос 16 определяется поставленной геологической задачей. При необходимости возможно более плотное и информативное размещение измерительных кос 16 в виде сетки пар электродов. Каждая коса 16 содержит по крайней мере один комплект, состоящий из датчика глубины 17, датчика проводимости морской воды 18, системы позиционирования 19, а также систему сбора данных 20.
В некоторых случаях целесообразно разместить на противоположных концах каждой измерительной косы по комплекту, состоящему из системы позиционирования 19, датчика глубины 17 и датчика проводимости морской воды 18 (по п. 3 ф-лы).
В частном случае для получения максимально полной информации каждая пара заземляющих электродов всех кос 16 может быть оснащена датчиками глубины 17 и проводимости 18, системой позиционирования 19 (по п. 4 ф-лы), при этом, как и в общем случае, каждая коса 16 оснащена одной системой сбора данных 20.
На фиг. 3 показана размещенная на исследуемом участке дна моря 21 одна измерительная коса 16, содержащая п пар заземляющих электродов 22. Длина косы 16 составляет Li, расстояние между электродами в паре L2 (измерительная база), расстояние между парами электродов L3 (расстояние между измерительными точками). Измерительная коса 16 оснащена системой сбора данных 20. На поверхности моря 23 находится поверхностный буй 24, служащий для установки и подъема измерительной косы 16.
В качестве программатора 4 и генератора 5 могут быть использованы ранее разработанные и многократно протестированные наземные комплексы для электромагнитного зондирования земли [7]. Антенна 6 может быть выполнена в виде буксируемого плавающего электрического диполя с заземленными (заводненными) концами.
Импедансное частотное зондирование морского дна с помощью разработанного способа осуществляется следующим образом. С использованием специального корабля на интересующем участке морского дна 21 размещают измерительное оборудование, включающее блок 2 с автономной донной МТ-АМТ станцией 9 и блок 3 с системой многоэлектродных измерительных кос 16. В процессе установки с использованием датчиков глубины 12, 17, датчиков проводимости 13, 18 и систем позиционирования 14, 19 осуществляют измерение глубины моря, профиля проводимости морской воды в зависимости от глубины o(z) и координат в точках размещения донной МТ-АМТ станции 9 и пар электродов 22 измерительных кос 16. Опубликованные данные [5] показывают, что существенные изменения температуры и, соответственно, проводимости морской воды происходят на первых 100-^-200 метрах глубины. Затем на расстоянии до ближайшего электрода, позволяющем выполнить условие «плоской волны», размещают специально судно, на котором располагается блок 1 с генератором 5 и антенной 6. Это может быть то же самое судно, с помощью которого осуществлялась установка измерительного оборудования на дно моря 21. Наконец, в программатор 4 загружают специальную управляющую программу, определяющую сетку частот, на которых должен работать генератор 5 в монохроматическом режиме, порядок перестройки частоты и время работы генератора 5 на каждой частоте. После этих подготовительных работ дистанционно включают донные блок 2 и блок 3, запускают контролируемый источник зондирующего сигнала, проводят цикл измерений по управляющей программе и регистрируют результат на систему сбора данных 8. При проведении сеанса измерений необходимо контролировать, чтобы ориентация антенны 6 (электрический диполь с заземленными концами) примерно соответствовала ориентации измерительных кос 16.
Конечной целью использования предлагаемого способа морского импедансного частотного зондирования и комплекса для его реализации является получение информации о распределении поверхностного импеданса (в общем случае тензора поверхностного импеданса) на заданной площадке морского дна 21. Вектора магнитного  и электрического
и электрического  полей измеряют с помощью датчиков магнитного поля 10 и электрического поля 11 в точке размещения автономной донной МТ-АМТ станции 9. Это позволяет определить импеданс, зависящий от частоты, только в одной точке, где размещается станция 9. Далее, используя измерения векторов магнитного
полей измеряют с помощью датчиков магнитного поля 10 и электрического поля 11 в точке размещения автономной донной МТ-АМТ станции 9. Это позволяет определить импеданс, зависящий от частоты, только в одной точке, где размещается станция 9. Далее, используя измерения векторов магнитного  и электрического
и электрического  полей на донной станции 9 от контролируемого источника, вычисляют магнитное поле на поверхности моря
полей на донной станции 9 от контролируемого источника, вычисляют магнитное поле на поверхности моря  в точке над донной станцией 9. Согласно [1, 6] записывают дифференциальное уравнение и начальные условия для определения
в точке над донной станцией 9. Согласно [1, 6] записывают дифференциальное уравнение и начальные условия для определения 

где μ0=4π⋅10-7 Гн/м - магнитная проницаемость вакуума,
ρ=о-1 - удельное сопротивление морской воды,
σ - удельная проводимость морской воды,
i - мнимая единица,
ω - круговая частота.
В результате решения дифференциального уравнения (1) с начальными условиями (2) получают амплитуду и фазу магнитного поля  на поверхности моря 23 над донной станцией 9. При этом используется измеренный с помощью измерителя проводимости 13 профиль проводимости морской воды o(z).
на поверхности моря 23 над донной станцией 9. При этом используется измеренный с помощью измерителя проводимости 13 профиль проводимости морской воды o(z).
Используя  и вектор
и вектор  направленный из точки источника (блок 1, антенна 6) в точку расположения донной станции 9 в плоскости моря, записывают выражение для магнитного момента (то есть калибруют источник):
направленный из точки источника (блок 1, антенна 6) в точку расположения донной станции 9 в плоскости моря, записывают выражение для магнитного момента (то есть калибруют источник):

где  определяется из данных систем позиционирования 7 и 14.
определяется из данных систем позиционирования 7 и 14.
На следующем этапе вычисляют магнитное поле от контролируемого источника (блок 1) на поверхности моря 23 над каждой парой 22 электродов измерительных кос 16:

где l - номер косы,
n - номер пары электродов,
все  определяются из данных систем позиционирования 19.
определяются из данных систем позиционирования 19.
В результате обработки первичных данных получают информацию о распределении зондирующего электрического поля на дне моря EII(d) вдоль косы, что определяет двухточечную краевую задачу. Но для вычисления импеданса необходимо знать как электрическое, так и магнитное поле на дне моря 21. Двухточечная краевая задача может быть приведена к задаче Коши, в результате:

Здесь  (0) и
(0) и  (0) получаются из решения двух вспомогательных начальных задач:
(0) получаются из решения двух вспомогательных начальных задач:
где  - нормированная глубина,
- нормированная глубина,
В результате находят вектора магнитного  и электрического EII (d) полей в каждой точке измерения (в каждой (fc - 1) точке нахождения пар электродов 22 измерительных кос 16) и получают информации о распределении поверхностного импеданса на заданной площадке морского дна 21.
и электрического EII (d) полей в каждой точке измерения (в каждой (fc - 1) точке нахождения пар электродов 22 измерительных кос 16) и получают информации о распределении поверхностного импеданса на заданной площадке морского дна 21.
Разработанное устройство в виде комплекса, реализующего заявленный способ морского аудиомагнитотеллурического зондирования по п. 5, содержит блок 2 и блок 3, показанные на фиг. 1. Блок 2 представляет собой автономную донную МТ-АМТ станцию 9 с двумя широкополосными индукционными магнитными датчиками, измеряющими две ортогональные компоненты горизонтального магнитного поля 10 и двумя ортогональными контактными (электродными) датчиками электрического поля 11. На платформе донной станции 9 размещены также датчики глубины 12, проводимости морской воды 13, система позиционирования 14 и система сбора данных 15. Дополнительно донная станция 9 снабжена вертикальной кабельной линией с буем, на которой в нескольких точках совместно размещены датчик глубины и датчик проводимости морской воды для контроля глубинного профиля проводимости. Количество точек выбирается исходя из необходимой точности измерения глубинного профиля проводимости, как правило, не менее трех. Блок 3 содержит l особым образом разложенных на дне длинных измерительных кос 16, каждая из которых содержит п пар заземляющих электродов, общее количество пар заземляющих электродов (k-1). На фиг. 2 приведен пример размещения на дне моря измерительного оборудования: показана линейная укладка кос 16, когда они ориентированы в одном направлении. Конкретная конфигурация размещения кос 16 определяется поставленной геологической задачей. При необходимости возможно более плотное и информативное размещение измерительных кос 16 в виде сетки пар электродов. Каждая коса 16 содержит по крайней мере один комплект, состоящий из датчика глубины 17, датчика проводимости морской воды 18, системы позиционирования 19, а также систему сбора данных 20.
В некоторых случаях целесообразно разместить на противоположных концах каждой измерительной косы по комплекту, состоящему из системы позиционирования 19, датчика глубины 17 и датчика проводимости морской воды 18 (по п. 7 ф-лы).
В частном случае для получения максимально полной информации каждая пара заземляющих электродов всех кос 16 может быть оснащена датчиками глубины 17 и проводимости 18, системой позиционирования 19 (по п. 8 ф-лы), при этом, как и в общем случае, каждая коса 16 оснащена одной системой сбора данных 20.
В разработанном способе морского аудиомагнитотеллурического зондирования на дно моря устанавливают одну донную МТ-АМТ станцию 9 с двумя ортогональными широкополосными индукционными датчиками 10 горизонтального магнитного поля  и двумя ортогональными контактными (электродными) датчиками 11 электрического поля
и двумя ортогональными контактными (электродными) датчиками 11 электрического поля  На платформе донной станции 9 размещается также система сбора данных 15, датчик проводимости морской воды 13 в зависимости от глубины σ(z)), датчик глубины 12 и система позиционирования 14. Измерения глубины моря, вертикального профиля проводимости морской воды, а также координаты места расположения донной МТ-АМТ станции 9 производят в процессе ее установки (погружения).
На платформе донной станции 9 размещается также система сбора данных 15, датчик проводимости морской воды 13 в зависимости от глубины σ(z)), датчик глубины 12 и система позиционирования 14. Измерения глубины моря, вертикального профиля проводимости морской воды, а также координаты места расположения донной МТ-АМТ станции 9 производят в процессе ее установки (погружения).
Измерения на донной станции 9 позволяют определить донный импеданс в одной точке и, самое главное, - пересчитать магнитное поле на поверхность моря [1] над станцией 9 в зависимости от частоты с учетом σ(z). Распределение магнитного поля на поверхности моря 23 над каждой парой электродов 22 принимают равным распределению магнитного поля на поверхности моря 23 над донной МТ-АМТ станцией 9. На дне моря 21 в районе размещения донной станции 9 раскладывают сеть измерительных кос 16 с распределенными вдоль них парами электродов 22. Таким образом, измеряют распределение электрического поля на дне (вдоль кос 16). Аналогично донной станции 9 на измерительных косах 16 размещают датчики проводимости 18 и глубины 17, систему позиционирования 19, а также система сбора данных 20.
В частном случае реализации комплекса для морского аудиомагнитотеллурического зондирования каждая измерительная коса 16 содержит два комплекта, состоящих из системы позиционирования 19, датчика глубины 17 и датчика проводимости морской воды 18 и находящихся на противоположных концах измерительной косы 16. В другом частном случае реализации каждая пара электродов 22 измерительных кос 16 содержит один комплект, состоящий из системы позиционирования 19, датчика глубины 17 и датчика проводимости морской воды 18.
В конечном итоге необходимо узнать распределение поверхностного импеданса, то есть электрическое и магнитное поле на дне в зависимости от частоты зондирующего поля. Зная магнитное поле на поверхности моря и электрическое поле на дне, с математической точки зрения имеют дело с двухточечной краевой задачей. Известен прием, описанный в разделе 9.3-4 источника [6] и позволяющий свести краевую задачу к начальной, что существенно облегчает вычислительные процедуры по определению донного импеданса.
Используя измерения  и
и  на донной МТ-АМТ станции 9, вычисляют магнитное поле на поверхности моря
на донной МТ-АМТ станции 9, вычисляют магнитное поле на поверхности моря  в точке над донной станцией 9. Следуя [1], записывают дифференциальное уравнение и начальные условия для определения
в точке над донной станцией 9. Следуя [1], записывают дифференциальное уравнение и начальные условия для определения

здесь μ0=4π⋅10-7 Гн/м - магнитная проницаемость вакуума,
ρ=σ-1 - удельное сопротивление морской воды.
В результате решения дифференциального уравнения (7) с начальными условиями (8) получают амплитуду и фазу магнитного поля  на поверхности моря. Важно подчеркнуть, что
на поверхности моря. Важно подчеркнуть, что  можно полагать однородным в горизонтальной плоскости на всей изучаемой площади.
можно полагать однородным в горизонтальной плоскости на всей изучаемой площади.
Окончательно, необходимо знать как электрическое поле EII(d) (вдоль кос 16), так и ортогональное ему магнитное поле  на дне моря. Двухточечная краевая задача может быть приведена к задаче Коши, в результате получают:
на дне моря. Двухточечная краевая задача может быть приведена к задаче Коши, в результате получают:

здесь  и
и  получаются из решения двух вспомогательных начальных задач:
получаются из решения двух вспомогательных начальных задач:


где  - нормированная глубина, к2=iωμ0σ(z).
- нормированная глубина, к2=iωμ0σ(z).
Таким образом, предлагаемая группа изобретений позволяет снизить трудоемкость морских работ и уменьшить стоимость используемого оборудования, в том числе за счет использования единственной автономной донной МТ-АМТ станции.
Согласно предложенному изобретению при морском импедансном частотном зондировании используется буксируемый источник зондирующего поля, представляющий собой электрический диполь с заземленными концами. На расстоянии от источника, где выполняется условие плоской «волны», на дне моря устанавливается одна донная МТ-АМТ станция с датчиками магнитного и электрического поля. Измерения на донной станции позволяют определить донный импеданс в одной точке. Кроме того на дне моря в районе размещения донной станции раскладывают сеть измерительных кос с распределенными вдоль них парами электродов заземления. У каждой пары электродов измеряют распределение электрического поля на дне, а магнитное поле рассчитывают. В результате получают распределение поверхностного импеданса, то есть электрическое и магнитное поле на дне в зависимости от частоты зондирующего поля.
Согласно предложенному изобретению при морском аудиомагнитотеллурическом зондировании используются донная МТ-АМТ станция и измерительные косы, размещенные на дне заданной области акватории и снабженные системами позиционирования, датчиками глубины, датчиками проводимости морской воды. Измерения на донной станции позволяют определить донный импеданс в месте расположения станции. У каждой пары электродов измерительных кос измеряют распределение электрического поля на дне, а магнитное поле рассчитывают. В результате получают распределение поверхностного импеданса, то есть электрическое и магнитное поле на дне в зависимости от частоты зондирующего поля.
Литература
1. Электроразведка: справочник геофизика // Под ред. В.К. Хмелевского и В.М. Бондаренко. Книга 1, главы 10, 11, 2-е изд. перераб. и доп. М.: Недра, 1989, 438 с.
2. «Электромагнитное зондирование для поиска залежей углеводородов» Д. Брэйди и др., Нефтегазовое обозрение, 2009, 21, №1, с. 4.
3. М.С. Жданов, «Теория обратных задач и регуляризации в геофизике», перевод с английского под ред. И.М. Варенцова, Научный мир, Москва, 2007, стр. 712.
4. Электроразведка: пособие по электроразведочной практике для студентов геофизических специальностей, том 1, глава 5, под ред. проф. И.Н. Модина и доц. А.Г. Яковлева - 2-е изд. перераб. и доп.- Тверь «ПолиПРЕСС», 2018, 274 с.
5. М.С. Глаголева, Л.И. Скриптунова. Прогноз температуры воды в океане. - Л.: Гидрометеоиздат, 1979.
6. Г. Корн и Т. Корн. Справочник по математике (раздел 9.3-4). - М., Изд-во «Наука», 1973,832 с.
7. В.В. Колобов, М.Б. Баранник, А.А. Жамалетдинов. Генераторно-измерительный комплекс «Энергия» для электромагнитного зондирования литосферы и мониторинга сейсмоактивных зон. - СПб: «СОЛО», 2013. - 240 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ морской электроразведки | 2017 |
|
RU2642492C1 |
| СПОСОБ МОРСКОЙ ГЕОЭЛЕКТРОРАЗВЕДКИ И ИССЛЕДОВАТЕЛЬСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2557675C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МОРСКОЙ ЭЛЕКТРОРАЗВЕДКИ НЕФТЕГАЗОВЫХ МЕСТОРОЖДЕНИЙ | 2006 |
|
RU2375728C2 |
| УСТРОЙСТВО ДЛЯ МОРСКОЙ ЭЛЕКТРОРАЗВЕДКИ НЕФТЕГАЗОВЫХ МЕСТОРОЖДЕНИЙ И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2612726C2 |
| ИССЛЕДОВАТЕЛЬСКИЙ КОМПЛЕКС ДЛЯ МОРСКОЙ ЭЛЕКТРОРАЗВЕДКИ И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2780574C2 |
| СИСТЕМА ДЛЯ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2008 |
|
RU2392643C2 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376612C1 |
| Способ электромагнитной разведки источников углеводородного сырья на глубоком шельфе морских акваторий | 2016 |
|
RU2627670C1 |
| Способ морской электроразведки | 1990 |
|
SU1819354A3 |
| СИСТЕМЫ СБОРА ДАННЫХ ДЛЯ МОРСКОЙ МОДИФИКАЦИИ С КОСОЙ И ПРИЕМНЫМ МОДУЛЕМ | 2016 |
|
RU2639728C1 |

Изобретения относятся к геофизике, а именно к устройствам и методам низкочастотного электромагнитного (ЭМ) зондирования земли с использованием активных (контролируемых) и естественных источников ЭМ полей, и может применяться, в частности, при поиске рудных полезных ископаемых, а также нефти и газа на морском шельфе. Сущность: в способе морского импедансного частотного зондирования определяют донный импеданс в заданной области акватории путем определения горизонтальных ортогональных векторов электрического и магнитного полей от контролируемого источника. В способе морского аудиомагнитотеллурического зондирования определяют донный импеданс в заданной области акватории путем определения горизонтальных ортогональных векторов электрического и магнитного полей от естественного источника. В каждом из способов используют единственную автономную донную МТ-АМТ станцию и (k - 1) пар электродов в измерительных косах, расположенных на дне акватории. Измеряют глубину моря и вертикальный профиль проводимости морской воды в местах расположения донной МТ-АМТ станции и измерительных кос, а также координаты этих точек. Вычисляют магнитное поле на поверхности моря над донной МТ-АМТ станцией. Получают распределение магнитного поля на поверхности моря над каждой парой электродов. Измеряют распределение электрического поля на дне вдоль косы. Преобразуют двухточечную краевую задачу по определению донного магнитного поля в задачу Коши и вычисляют распределение магнитного поля на дне в местах расположения каждой пары электродов. Технический результат: снижение трудоемкости морских работ и сокращение используемого оборудования. 4 н. и 4 з.п. ф-лы, 3 ил.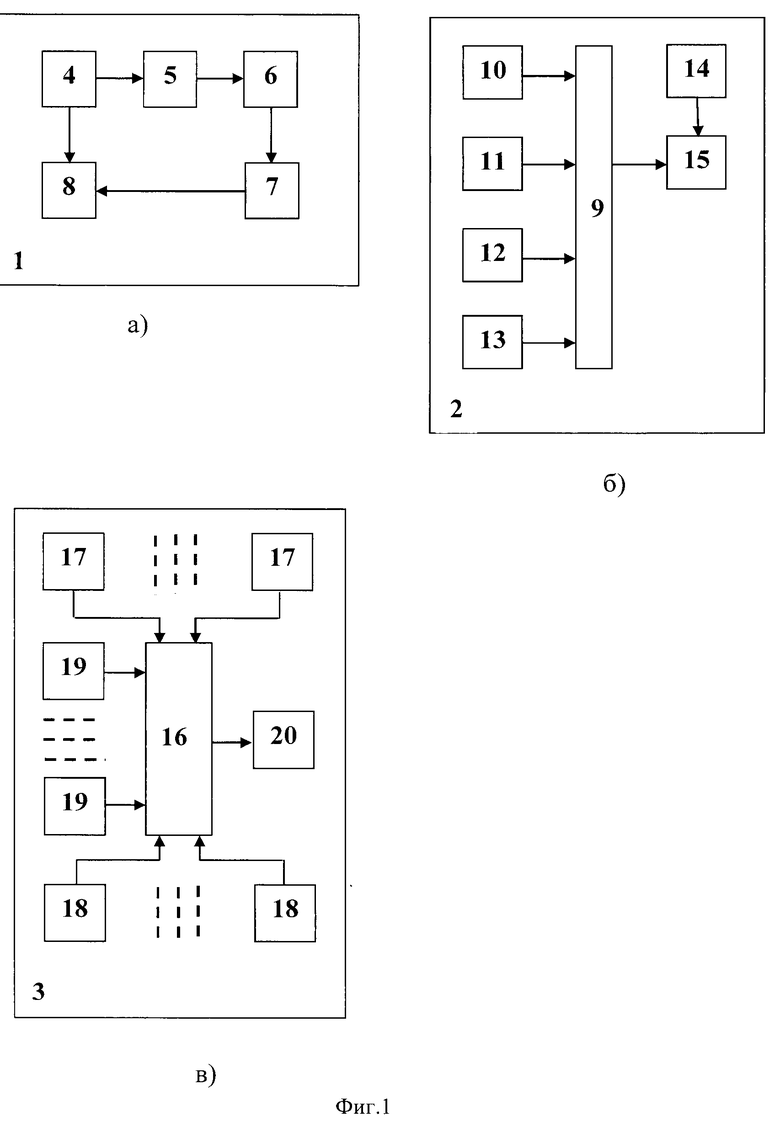
1. Способ морского импедансного частотного зондирования, включающий определение донного импеданса в заданной области акватории путем определения горизонтальных ортогональных векторов электрического и магнитного полей от контролируемого источника в к точках дна заданной области акватории, отличающийся тем, что используют единственную автономную донную МТ-АМТ станцию и (k - 1) пар электродов в измерительных косах, расположенных на дне акватории, измеряют глубину моря и вертикальный профиль проводимости морской воды в местах расположения донной МТ-АМТ станции и измерительных кос, а также координаты этих точек, калибруют контролируемый источник, вычисляя магнитное поле на поверхности моря над донной МТ-АМТ станцией, затем вычисляют распределение магнитного поля на поверхности моря над каждой парой электродов, при этом измеряют распределение электрического поля на дне вдоль косы, преобразуют двухточечную краевую задачу по определению донного магнитного поля в задачу Коши и вычисляют распределение магнитного поля на дне в местах расположения каждой пары электродов.
2. Комплекс для морского импедансного частотного зондирования, реализующий способ по п. 1, содержащий контролируемый источник зондирующего сигнала, находящийся на поверхности моря, устройства измерения, снабженные датчиками, измеряющими электрическое поле от контролируемого источника, и расположенные в к точках дна заданной области акватории, причем устройство измерения, являющееся донной МТ-АМТ станцией, дополнительно снабжено системой позиционирования, датчиками магнитного поля и системой сбора данных, отличающийся тем, что устройства измерения представляют собой одну донную МТ-АМТ станцию и (k - 1) пар электродов измерительных кос, причем донная МТ-АМТ станция дополнительно снабжена датчиком глубины, датчиком проводимости морской воды, а также вертикальной кабельной линией с буем, с размещенными на ней несколькими датчиками глубины и проводимости морской воды, при этом каждая измерительная коса содержит систему сбора данных и по крайней мере один комплект, состоящий из системы позиционирования, датчика глубины и датчика проводимости морской воды.
3. Комплекс для морского импедансного частотного зондирования по п. 2, отличающийся тем, что каждая измерительная коса содержит два комплекта, состоящих из системы позиционирования, датчика глубины и датчика проводимости морской воды и находящихся на противоположных концах измерительной косы.
4. Комплекс для морского импедансного частотного зондирования по п. 2, отличающийся тем, что каждая пара электродов измерительных кос содержит один комплект, состоящий из системы позиционирования, датчика глубины и датчика проводимости морской воды.
5. Способ морского аудиомагнитотеллурического зондирования, включающий определение донного импеданса в заданной области акватории путем определения горизонтальных ортогональных векторов электрического и магнитного полей от естественного источника в к точках дна заданной области акватории, отличающийся тем, что используют единственную автономную донную МТ-АМТ станцию и (k - 1) пар электродов в измерительных косах, расположенных на дне акватории, измеряют глубину моря и вертикальный профиль проводимости морской воды в местах расположения донной МТ-АМТ станции и измерительных кос, а также координаты этих точек, вычисляют магнитное поле на поверхности моря над донной МТ-АМТ станцией, принимают распределение магнитного поля на поверхности моря над каждой парой электродов равным магнитному полю на поверхности моря над донной МТ-АМТ станцией, при этом измеряют распределение электрического поля на дне вдоль косы, преобразуют двухточечную краевую задачу по определению донного магнитного поля в задачу Коши и вычисляют распределение магнитного поля на дне в местах расположения каждой пары электродов.
6. Комплекс для морского аудиомагнитотеллурического зондирования, реализующий способ по п. 5, содержащий устройства измерения, снабженные датчиками, измеряющими электрическое поле от естественного источника, и расположенные в к точках дна заданной области акватории, причем устройство измерения, являющееся донной МТ-АМТ станцией, дополнительно снабжено системой позиционирования, датчиками магнитного поля и системой сбора данных, отличающийся тем, что устройства измерения представляют собой одну донную МТ-АМТ станцию и (k - 1) пар электродов измерительных кос, причем донная МТ-АМТ станция дополнительно снабжена датчиком глубины, датчиком проводимости морской воды, а также вертикальной кабельной линией с буем, с размещенными на ней несколькими датчиками глубины и проводимости морской воды, при этом каждая измерительная коса содержит систему сбора данных и по крайней мере один комплект, состоящий из системы позиционирования, датчика глубины и датчика проводимости морской воды.
7. Комплекс для морского аудиомагнитотеллурического зондирования по п. 6, отличающийся тем, что каждая измерительная коса содержит два комплекта, состоящих из системы позиционирования, датчика глубины и датчика проводимости морской воды и находящихся на противоположных концах измерительной косы.
8. Комплекс для морского аудиомагнитотеллурического зондирования по п. 6, отличающийся тем, что каждая пара электродов измерительных кос содержит один комплект, состоящий из системы позиционирования, датчика глубины и датчика проводимости морской воды.
| СПОСОБ МОРСКОЙ ЭЛЕКТРОРАЗВЕДКИ НЕФТЕГАЗОВЫХ МЕСТОРОЖДЕНИЙ И АППАРАТУРНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324956C2 |
| УСТРОЙСТВО ДЛЯ МОРСКОЙ ЭЛЕКТРОРАЗВЕДКИ НЕФТЕГАЗОВЫХ МЕСТОРОЖДЕНИЙ И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2612726C2 |
| СПОСОБ 3D МОРСКОЙ ЭЛЕКТРОРАЗВЕДКИ НЕФТЕГАЗОВЫХ МЕСТОРОЖДЕНИЙ | 2007 |
|
RU2356070C2 |
| ДОННАЯ СТАНЦИЯ | 2012 |
|
RU2484504C1 |
| AU 2020101106 A4, 30.07.2020 | |||
| CN 109738958 A, 10.05.2019 | |||
| US 7800374 B2, 21.09.2010 | |||
| WO 2005081016 A1, 01.09.2005 | |||
| Способ правки сварных листовых конструкций | 1983 |
|
SU1118509A1 |

