Настоящее изобретение касается области применения методов и систем для управления сельскохозяйственным производством, а более конкретно методов и систем для сбора данных с применением датчиков, размещенных на сельскохозяйственных машинах, с целью оптимизации обработки почвы, использования сельскохозяйственных орудий и сева.
Предпосылки создания изобретения
В настоящее время использование оборудования или сельскохозяйственных орудий для подготовки почвы и последующего сева сельскохозяйственных культур является одной из самых важных задач для правильного сева культур в сельском хозяйстве.
Энергозатраты на работы, связанные с подготовкой почвы и севом (пахота, рыхление или перемешивание почвы; уничтожение, закапывание или смешивание отходов; выравнивание и т.п.), заставляют фермеров выбирать - выполнять ли все полевые работы, иногда отказываясь от какой-либо из них по экономическим причинам во вред преимуществам их применения для выращивании сельскохозяйственных культур.
Тенденцией в упомянутой отрасли является оптимизация сельскохозяйственных работ для обеспечения оптимального управления обработкой почвы, с выполнением нескольких полевых работ за меньшее количество проходов или даже за один проход. Таким образом, во время подготовки сельскохозяйственных угодий важно знать состояние почвы, что дает возможность оценивать, планировать и принимать решения относительно работ с сельскохозяйственными орудиями как во время подготовки почвы, так и во время сева.
Механические параметры почвы, такие как твердость, пластичность или влажность, влияют на оптимальную конфигурацию оборудования, которое будет использоваться для сельскохозяйственных работ, поэтому знание этих параметров позволяет оптимизировать выполнение работ, уменьшить затраты, и даже позволяет выборочно расширить применение этих работ. Кроме того, такая оптимизация увеличивает срок службы сельскохозяйственных орудий, позволяет избежать поломок, которые увеличивают время выполнения и уменьшают производительность операции, увеличивая затраты на сельскохозяйственные работы.
В настоящее время в этой отрасли известны различные решения для сбора данных датчиками, связанными с сельскохозяйственными машинами, с применением которых определяют различные параметры сельскохозяйственных угодий. Например, в течение многих лет известно использование датчиков для определения состояния посевов путем взвешивания зерна, измерения величины его влажности или других характеристик урожая, получения информации об урожае или изменения доз внесения удобрений для сельскохозяйственных культур в режиме реального времени.
Другие решения относительно механического исследования почвы предполагают использование датчиков, способных определять параметры почвы путем отбирания проб во время остановок или извлечения фракций для дальнейшего химического анализа, что позволяет определить рН и другие параметры.
Известны также решения, в которых отдают предпочтение сбору данных для дальнейшего анализа электропроводности и даже определения оптическим методом свойств почвы, связывая эти данные с составом почвы, например, органическими веществами, чтобы изменять дозу семян во время сева сельскохозяйственной культуры.
Однако все решения, известные в настоящее время в этой отрасли, касаются исключительно сельскохозяйственной культуры, ее специфического состояния во время роста и сева семян, учитывая, например, органические свойства почвы. Тем не менее на сегодняшний день нет предложений, способных эффективно в реальном времени определять механическое состояние почвы, с помощью которых можно было бы оптимизировать использование сельскохозяйственных орудий для подготовки почвы и сева.
Например, в патентной заявке US 20160262300 А1 раскрыто устройство, которое динамически настраивает плуговые лемеха в зависимости от состояния почвы, но основывает свою работу на датчиках, включающих в себя радиолокатор, измеренные величины температуры или определения состава почвы. Проблема такого подхода заключается в том, что выводы, даже если предположить, что они могут быть сделаны в режиме реального времени, являются слишком общими, поскольку они относятся к участкам почвы, которые не связаны строго с действием плуговых лемехов.
В другой отрасли известны алгоритмы определения вибраций, касающиеся определения физических свойств почвы, которые способны анализировать несущую способность почвы, но всегда основаны на датчиках вибрации и пассивной обработке информации о вибрации, при этом оборудование устанавливается в определенных положениях, например, на железнодорожном пути, для того, чтобы исследовать поведение железнодорожной платформы и взаимодействие почва/оборудование в условиях возбуждения, внешнего по отношению к их расположению (подвижной состав), и измерять, как внешняя среда изменяется с течением времени.
В связи со всем вышеизложенным понятно, что отрасли на ее современном уровне развития не хватает динамического решения для управления сельскохозяйственным производством, основанного на точном определении механического состояния почвы в режиме реального времени, которое соответствовало бы таким методикам, например, как почвозащитная обработка почвы, прямой сев или точное земледелие, т.е. методикам, которые широко признаны в аграрной отрасли как приемлемые. Текущий высокий спрос на такие методы в сочетании с предсказуемой эволюцией роботизированной агрономии обещает реальное будущее для любого решения такого типа.
Описание изобретения
Для достижения поставленных целей и устранения вышеупомянутых недостатков, настоящее изобретение основано на анализе измеренных величин, полученных с применением подвижных датчиков, при этом возбуждение в этом комплексе (трактор/сельскохозяйственное орудие) является динамическим по отношению к объекту исследования (сельскохозяйственная почва), что приводит к массовому получению данных с нескольких позиций, которые после обработки предоставляют ряд параметров, которые определяют взаимосвязь различных типологий/моделей поведения обработанной почвы.
С этой целью настоящее изобретение в первом аспекте предоставляет способ определения механического состояния сельскохозяйственных угодий, включающий следующие этапы:
- получение, с применением измерительного средства, размещенного в почвообрабатывающем элементе сельскохозяйственной машины, измеренных величин вибрационного сигнала, при этом упомянутый вибрационный сигнал вырабатывается в результате обработки почвы сельскохозяйственной машиной на сельскохозяйственном угодье;
- отправка средством связи измеренных величин, полученных из вибрационного сигнала, сгруппированных в пакеты данных (с целью оптимизации потребления электроэнергии упомянутым средством связи), в процессорный модуль;
- превращение процессорным модулем измеренных величин вибрационного сигнала, сгруппированного в пакеты данных, в частотный сигнал;
- вычисление измеренных величин энергии, исходя из частотного сигнала; и
- определение механического состояния сельскохозяйственных угодий на основе измеренных величин энергии частотного сигнала, при этом определяемое механическое состояние включает степень твердости и степень пластичности.
Процессорный модуль передает измеренные величины в частотную область, что позволяет ему рассчитывать измеренные величины энергии, исходя из частотного сигнала, такого как сигнал спектральной плотности мощности (PSD) или сигнал спектральной плотности энергии, из которой колебания, генерированные в элементах, из которых состоят сельскохозяйственные орудия, можно отфильтровать и определить. Таким образом, предпочтительно динамически и в режиме реального времени достигается автоматический анализ механического состояния почвы, и того, как элементы, которые используются в сельскохозяйственных орудиях для обработки почвы и сева, влияют на результат обработки почвы и позволяют создать наилучший возможный слой почвы для оптимизации последующего сева сельскохозяйственных культур.
Обработка в частотной области позволяет превращать информацию, такую как вибрации, путем устанавливания энергетических параметров, которые способны устранить шум в показаниях, полученных датчиками, и получить, с одной стороны, параметры прочности и уплотнения почвы, и с другой стороны возможные засорения рабочих элементов. Кроме того, обработка данных в частотной области позволяет управлять измеренными величинами ускорения, способными обеспечить повторяемость данных относительно степени уплотнения сельскохозяйственных угодий в эквивалентных почвенных условиях.
В одном из вариантов осуществления настоящего изобретения степень твердости и степень пластичности сельскохозяйственных угодий определяют в зависимости от измеренной величины амплитуды сигнала спектральной плотности мощности (PSD) и определенной полосы частот. Таким образом, вибрации в определенной полосе частот предпочтительно определены, и таким образом возможно установить соответствие между множеством механических состояний почвы и разными наборами механических параметров, связанных с разными ситуациями, что, наконец, позволяет создать базу данных сельского хозяйства.
В одном из вариантов осуществления настоящего изобретения предложено определение механического состояния сельскохозяйственных угодий на основе сравнения первого энергетического профиля, который соответствует расчетным измеренным величинам энергии, с множеством энергетических профилей, которые соответствуют множеству механических состояний.
В одном из вариантов осуществления настоящего изобретения предложен поток информации для обмена, включающий следующие этапы: отправка измеренных величин из измерительного средства в основной узел связи, расположенный в сельскохозяйственной машине; отправка информации на основе измеренных величин из основного узла в центральный сервер; и сохранение на центральном сервере информации на основе измеренных величин, отправленных основным узлом каждой сельскохозяйственной машины. Факультативно у сценариях с очень большим количеством датчиков измеренные величины измерительных средств могут быть переданы через несколько промежуточных узлов с функцией простого моста, выполненных так, чтобы обеспечить прием и отправку измеренных величин в основной узел.
Кроме того, рассмотрена возможность определения, с применением процессорного модуля, состояния почвообрабатывающего элемента согласно изменению, выявленному в частоте вращения почвообрабатывающего элемента, при этом состояние почвообрабатывающего элемента выбирают из состояния блокирования почвообрабатывающего элемента или состояния определенной степени износа.
Факультативно настоящим изобретением предложено модифицирование с применением исполнительного механизма системы для управления физическими параметрами почвообрабатывающего элемента в зависимости от определенного механического состояния сельскохозяйственных угодий, при этом физический параметр выбирают из таких как рабочая глубина, угол атаки почвообрабатывающего элемента, расстояние между почвообрабатывающими элементами, давление почвообрабатывающего элемента и скорость вращения почвообрабатывающего элемента. А также из любых других действий, предусмотренных для использования в сельскохозяйственных машинах, и степени свободы почвообрабатывающих элементов.
Конкретный вариант осуществления настоящего изобретения включает этап частотного фильтрования, на котором устраняют одну или несколько повторяющихся частот частотного сигнала, что соответствует вибрациям, свойственным работе почвообрабатывающего элемента.
Кроме того, рассмотрена возможность определения механического состояния сельскохозяйственных угодий путем сравнения по методикам, связанным с машинным обучением, таким как нейронные сети или другие алгоритмы группирования, первого энергетического профиля, который соответствует измеренным величинам энергии сигнала спектральной плотности мощности, с множеством энергетических профилей, которые соответствуют множеству механических состояний. Для этого вычисления показаний, выполненные в интервале частот, интегрированы в базу данных, которая позволяет узнавать не только о конкретных данных каждого из датчиков, но и об их постепенном варьировании со временем, так что методики, связанные с искусственным интеллектом, могут сравнивать и классифицировать сохраненные параметры уже классифицированных предшествующих случаев.
Методики, связанные с машинным обучением и искусственным интеллектом, в соответствии с одним из вариантов осуществления настоящего изобретения, действуют двумя способами: с одной стороны, они позволяют определить измеренные величины для текущего момента, когда упомянутый датчик обнаружен, а с другой стороны, они добавляют эти новые показания в систему, чтобы увеличить количество новых измеренных величин в системе с применением системы больших данных, которая постепенно увеличивает знания о поведении почвообрабатывающих элементов на новых участках, и с разными параметрами контура, которые система может найти, поскольку изменяются даты, когда система работает на этих почвах.
Во втором аспекте настоящее изобретение касается системы для определения механического состояния сельскохозяйственных угодий, которая включает в себя:
- сельскохозяйственную машину с по меньшей мере одним почвообрабатывающим элементом;
- измерительное средство, включающее в себя по меньшей мере один акселерометр и гироскоп, расположенный в по меньшей мере одном почвообрабатывающем элементе, выполненное так, чтобы обеспечить измерение вибрационного сигнала, который образуется в результате обработки почвы сельскохозяйственной машиной на сельскохозяйственных угодьях;
- процессорный модуль, связанный с упомянутым измерительным средством, для определения механического состояния почвы по измеренному вибрационному сигналу; и
- средство связи, выполненное так, чтобы обеспечить обмен информацией между измерительным средством и процессорным модулем;
при этом система выполнена так, чтобы обеспечить получение измеренных величин вибрационного сигнала с применением упомянутого измерительного средства в соответствии с предварительно установленной частотой; группирование в пакеты данных измеренных величин, полученных из вибрационного сигнала; превращение измеренных величин вибрационного сигнала, сгруппированных в пакеты данных, в частотный сигнал; вычисление измеренных величин энергии, исходя из частотного сигнала; и определение механического состояния сельскохозяйственных угодий на основе измеренных величин энергии частотного сигнала, при этом определенное механическое состояние включает степень твердости и степень пластичности.
Средство связи, в соответствии с одним из вариантов осуществления настоящего изобретения, включает в себя: основной узел, размещенный на сельскохозяйственной машине, выполненный так, чтобы обеспечить прием измеренных величин из измерительного средства; и удаленный центральный сервер, выполненный так, чтобы обеспечить получение информации, которая основана на измеренных величинах, которая отправляется из основного узла каждой сельскохозяйственной машины, и сохранение ее в базе данных.
Факультативно в одном из вариантов осуществления настоящего изобретения упомянутое средство связи также включает в себя один или несколько промежуточных узлов, расположенных между измерительным средством и основным узлом, выполненных так, чтобы обеспечить прием измеренных величин из измерительного средства и пересылку этих измеренных величин в основной узел, действуя как мост.
В одном из основных вариантов осуществления настоящего изобретения измерительное средство включает в себя единый датчик, расположенный в одном из почвообрабатывающих элементов, например, в диске, и средство связи включает в себя основной узел, реализованный практически в смартфоне, при этом смартфон также включает в себя процессорный модуль и компьютерное приложение управления. Таким образом предпочтение отдается тому, чтобы в самом простом сценарии были снижены требования к аппаратному обеспечению системы.
В одном из вариантов осуществления настоящего изобретения предоставлен модуль беспроводной связи, связанный с измерительными средствами, расположенными в каждом почвообрабатывающем элементе, который выполнен так, чтобы обеспечить отправку измеренных величин из измерительного средства в следующий узел, при этом упомянутый следующий узел выполнен так, чтобы обеспечить прием и передачу беспроводной связью. Таким образом, предпочтение отдается тому, чтобы в дополнение к классическому варианту устанавливания проводной связи между элементами, настоящее изобретение может устанавливать беспроводную связь между ними.
База данных центрального сервера, в соответствии с одним из вариантов осуществления настоящего изобретения, сохраняет множество энергетических профилей, которые соответствуют множеству известных ранее механических состояний, и процессорный модуль выполнен так, чтобы обеспечить сравнение первого энергетического профиля, который соответствует измеренным величинам энергии, с профилями из базы данных, и так, чтобы обеспечить оценивание механического состояния сельскохозяйственных угодий в реальном времени. В одном из конкретных вариантов осуществления настоящего изобретения оценивание механического состояния сельскохозяйственных угодий в реальном времени выполняют в соответствии с математической регрессивной моделью, которая сохраняется в базе данных.
Система по настоящему изобретению представляет собой распределенную систему, которая в соответствии с различными вариантами осуществления настоящего изобретения может изменять вычислительную нагрузку процессорного модуля между разными элементами системы. В одном из вариантов осуществления настоящего изобретения процессорный модуль включает в себя основной процессор, размещенный в основном узле. Кроме того, в одном из вариантов осуществления настоящего изобретения процессорный модуль также включает в себя локальный процессор, расположенный в одном или нескольких промежуточных узлах. Таким образом, предпочтительно вычислительная способность промежуточных узлов может быть использована для выгрузки некоторого вычисленного объема на основной процессор, когда это необходимо.
В одном из вариантов осуществления настоящего изобретения центральный сервер имеет вычислительную способность и выполнен так, чтобы главным образом принимать, сохранять и предоставлять возможность просмотра информации за длительный период времени относительно ранее полученных данных. Также предоставлена возможность того, что по мере увеличения объема данных за длительный период времени алгоритмы машинного обучения, такие как нейронные сети или другие, будут использоваться на центральном сервере для уточнения вычислений оценок механического состояния сельскохозяйственных угодий. Исходные значения алгоритмов - это ссылки, установленные алгоритмами процессорного модуля, так что в одном из вариантов осуществления настоящего изобретения основные узлы могут определять механическое состояние почвы, не требуя постоянной связи с центральным сервером, в другом случае будет достаточно иметь точечные соединения, чтобы передавать изменения в его алгоритм.
Процессорный модуль в одном из вариантов осуществления настоящего изобретения включает в себя систему управления, которая имеет по меньшей мере один привод, связанный с почвообрабатывающим элементом, выполненную так, чтобы изменять физические параметры почвообрабатывающего элемента.
Кроме того, один из вариантов осуществления настоящего изобретения включает в себя модуль геолокации, выполненный так, чтобы обеспечить определение местонахождения, где была получена каждая из измеренных величин, полученных из вибрационного сигнала. Таким образом, настоящее изобретение предпочтительно объединяет информацию о местонахождении с характеристикой почвы в базе данных, чтобы, например, генерировать карты изменяемости уплотнения почвы на участках, сохраняя и анализируя результаты в режиме реального времени. В дополнение к помощи немедленному реагирования оператора на почвы, он позволяет сравнить предварительные процессы и сезонные работы, чтобы принять решение относительно конфигурации сельскохозяйственных машин, насколько это возможно.
Сельскохозяйственная машина включает в себя трактор и по меньшей мере одно из сельскохозяйственных орудий, таких как: культиватор, сеялка, плуг или любое другое сельскохозяйственное орудие, предназначенное для обработки почвы; и при этом почвообрабатывающие элементы сельскохозяйственной машины выбраны из следующих: диски, рычаги, лемехи, бороны, муфты, наконечники, отвалы или любые другие элементы, выполненные так, чтобы обеспечить восприятие вибраций во время операции обработки почвы сельскохозяйственной машиной.
В одном из вариантов осуществления настоящего изобретения измерительные средства расположены на множестве почвообрабатывающих элементов сельскохозяйственной машины в соответствии с предварительно установленной типологией, при этом процессорный модуль выполнен так, чтобы обеспечить совместную обработку полученных вибрационных сигналов. Таким образом, настоящее изобретение предпочтительно учитывает размещение датчиков, их пары и переменные окружения для того, чтобы получить конечные параметры результатов обследования.
Настоящее изобретение имеет множество преимуществ, включая определение поведения сельскохозяйственных машин путем оценивания рабочего состояния каждого почвообрабатывающего элемента для того, чтобы прийти к выводу, например, о наличии блокирования в конкретном элементе, с которым связан датчик, или для того, чтобы определять его износ путем анализа частоты между одним и тем же компонентом в начале и в конце срока его эксплуатации, с помощью которого можно установить оптимальный момент для его замены.
В настоящем изобретении собирают множество показаний (различные параметры вибрации, связанные с механическим поведением почвы, и данные о пространственном размещении орудия по мере сбора данных), характеризуя их независимым и сгруппированным образом. Таким образом, речь идет о масштабируемом процессе роста и о характеристиках обучения, при этом то, что было изучено, используется для того, чтобы усовершенствовать работу машин. Таким образом, можно осуществить процесс самообучения в полевых условиях путем создания автономных систем прогнозирования.
С применением способа и системы по настоящему изобретению определяют состояние почвы, анализируя поведение почвообрабатывающих элементов и влияние того и другого на сельскохозяйственный процесс, так что можно оптимизировать затраты, обработку и энергопотребление на работы по подготовке сельскохозяйственных угодий. Анализируя вибрационные сигналы, которые соответствуют параметрам обработки почвы, таким как степень твердости и/или пластичности почвы, когда сельскохозяйственные машины осуществляют обработку почвы или сев сельскохозяйственных культур, можно уменьшить экономическое влияние этих работ с точки зрения износа материалов, расхода дизельного топлива, связанных с усилием или интенсивностью, с которыми выполняются работы, и конечным результатом, необходимым для сева.
Система по настоящему изобретению предпочтительно использует измеренные величины датчиков не только для измерения величины механического состояния почвы, но также позволяет считывать, передавать, обрабатывать, диагностировать, интерпретировать и действовать, тем самым создавая интеллектуальную систему для взаимодействия между почвообрабатывающими компонентами, снабженными упомянутыми измерительными средствами, и сельскохозяйственной машиной. Поэтому измеренные величины вводят в процесс интеллектуального прогнозирования, который позволяет уменьшить шум (ошибку) полученных данных, сравнив их с предыдущими данными, и получить ответ с использованием искусственного интеллекта в режиме реального времени, чтобы обеспечить систему усовершенствованиями для определения параметров, которые должны быть определены, и которые позволяют достичь даже автономной работы почвообрабатывающих элементов при подготовке и засеве сельскохозяйственных угодий.
Краткое описание фигур
Для завершения описания настоящего изобретения и для того, чтобы сделать его характеристики более понятными, в соответствии с приведенным как пример вариантом его осуществления, которому отдается предпочтение, к описанию приложен набор фигур, которые предназначены для иллюстрирования, и не предназначены для ограничения.
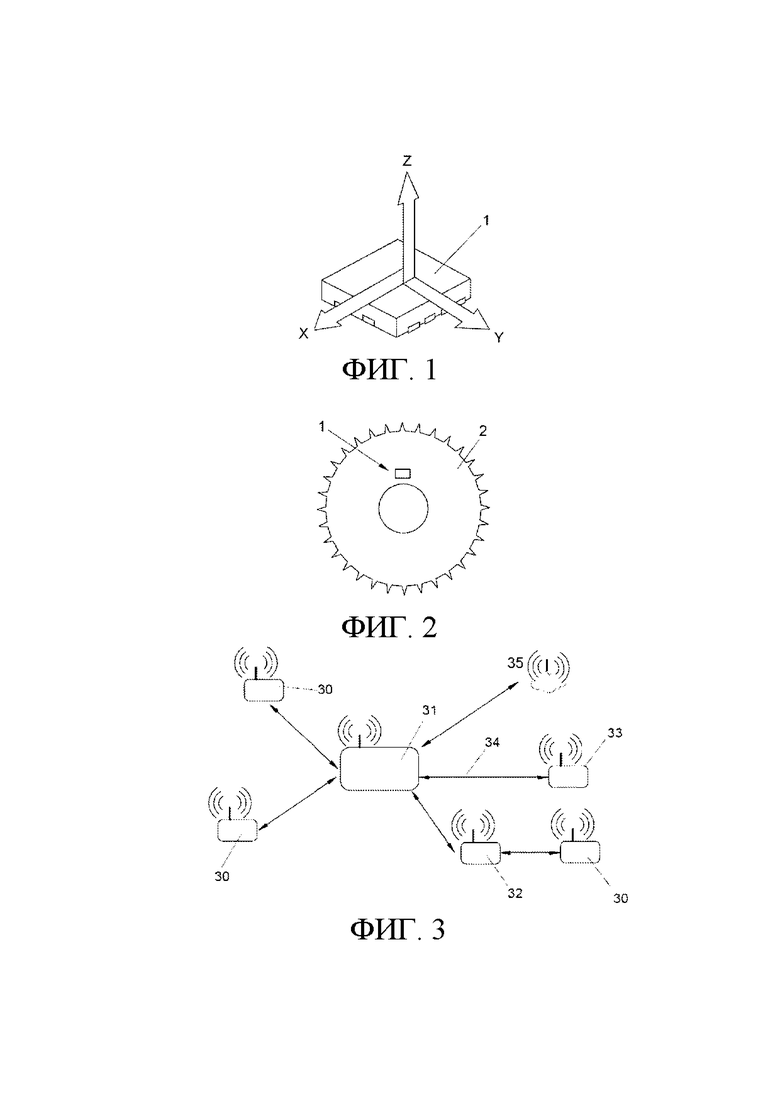
- На Фиг. 1 изображен один из датчиков по настоящему изобретению.
- На Фиг. 2 изображена дисковая борона сельскохозяйственной машины с присоединенным измерительным узлом.
- На Фиг. 3 схематически изображена система связи и управления по настоящему изобретению.
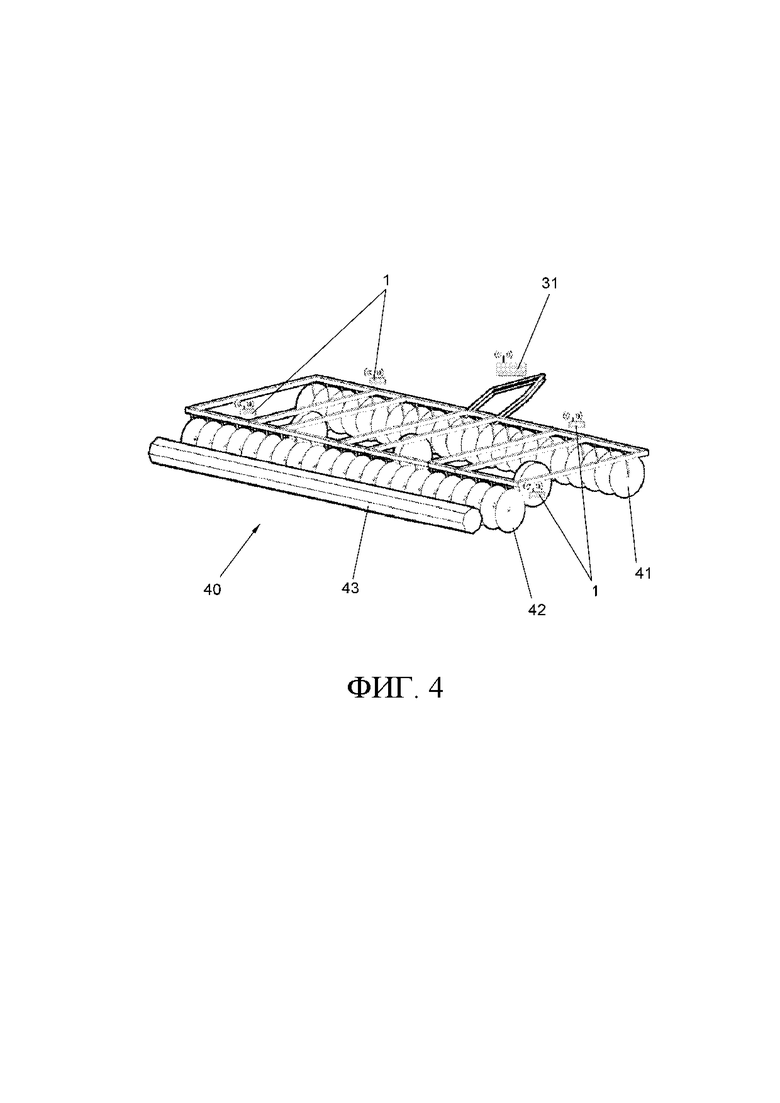
- На Фиг. 4 изображено размещение датчиков на сельскохозяйственной машине в соответствии с одним из вариантов осуществления настоящего изобретения.
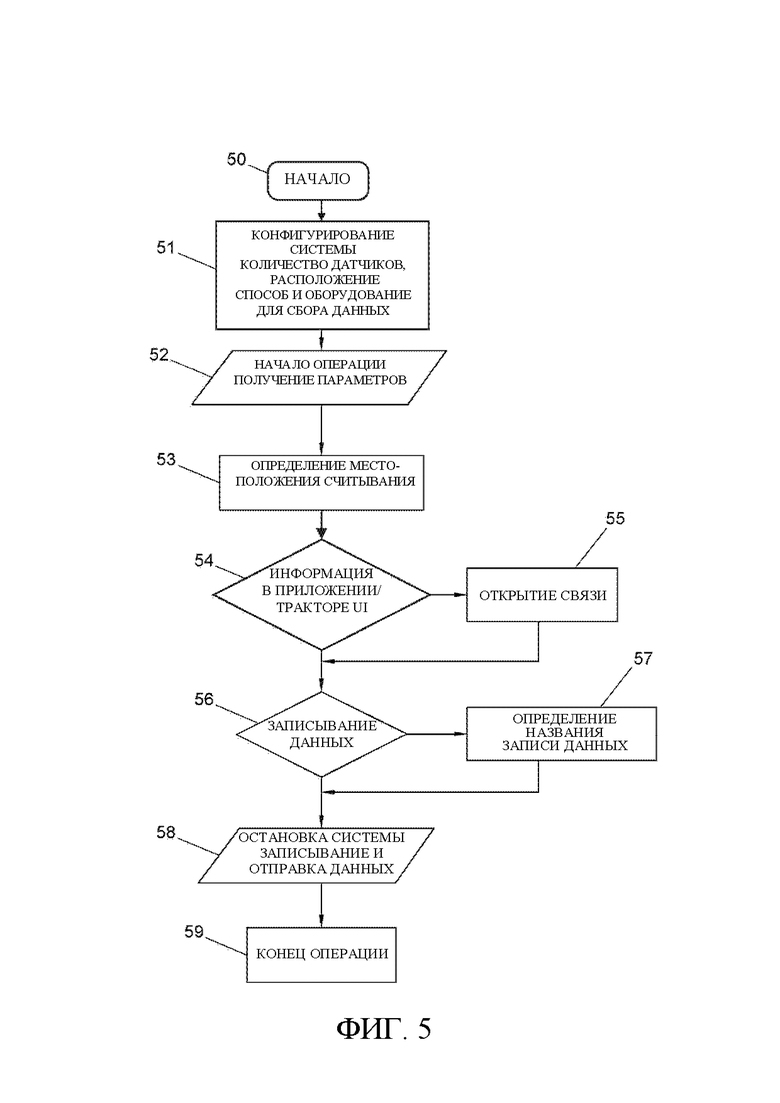
- На Фиг. 5 изображена схема информационного потока мобильного приложения, установленного в одном из вариантов осуществления настоящего изобретения.
- На Фиг. 6 показана схема передачи информации датчиков в одном из вариантов осуществления настоящего изобретения.
- На Фиг. 7 показана схема создания базы данных в одном из вариантов осуществления настоящего изобретения.
Описание варианта осуществления изобретения, которому отдается предпочтение
Настоящим изобретением раскрыты способ и система для определения механического состояния почвы с применением измеренных величин из датчиков, установленных в почвообрабатывающих элементах сельскохозяйственной машины.
Способ и система по настоящему изобретению оценивают измеренные величины, полученные датчиками, для составления прогноза некоторых механических параметров почвы в зависимости от анализа вибрационных сигналов, которые генерируются при работе сельскохозяйственной машины и ее взаимодействии с почвой, который фермеры предпочтительно используют для принятия решений, связанных с планированием сельского хозяйства, эксплуатацией своих машин или автоматизацией рабочих процессов.
Сеялка, культиватор, плуг или другое сельскохозяйственное орудие может иметь 10, 20, 30 или даже 100 почвообрабатывающих элементов, и их размещение в сельскохозяйственном орудии выполняется рядами, и сельскохозяйственное орудие может иметь 2 ряда, 3 ряда, 4 ряда и даже 8 рядов нескольких типов элементов, что позволяет выполнять несколько операций по подготовке почвы за один проход сельскохозяйственной машины на обрабатываемом поле. Таким образом, знание того, как за один проход сельскохозяйственное орудие ведет себя в ситуации с почвой, является оптимальным для выполнения таких работ и является точно одной из целей настоящего изобретения, при этом поведение орудий фиксируют во время выполнения работ по подготовке почвы и сева, измеряя вибрацию, которая генерируется в оборудовании из-за различного механического поведения почвы.
Сельскохозяйственные машины, которые чаще всего используют при подготовке почвы и при севе, включают в себя трактор и одно или несколько сельскохозяйственных орудий, таких как сеялки, разуплотнители, культиваторы или плуги. На этих сельскохозяйственных орудиях расположен комплект почвообрабатывающих элементов, которые являются конкретными для каждой работы, которую необходимо выполнить. Например, основными почвообрабатывающими элементами сеялок являются лемехи и посевные диски, которые выполнены так, чтобы обеспечить открытие борозды в почве. В разуплотнителях почвообрабатывающими элементами, которые контактируют с почвой, являются рычаги, выполненные так, чтобы обеспечить рыхление и вспучивание почвы, при этом они сохраняют поверхность неповрежденной и улучшают циркуляцию воды и насыщение кислородом почвы, содействуя росту корней и развитию растений, достижению больших урожаев. Упомянутые культиваторы выполняют несколько функций, таких как удаление сорняков, измельчение комков, разрыхление поверхностного слоя почвы, формирование мелкой почвы на семенной лунке или подготовка почвы к поливу и внесению удобрений в почву и для этого они имеют несколько почвообрабатывающих элементов, таких как сошники и культиваторные лапы разных форм и размеров в соответствии с работой, которую необходимо выполнить. Бороны и плуги также имеют диски с разной вогнутостью и размерами для обработки почвы. Другими почвообрабатывающими элементами являются отвалы плуга, сельскохозяйственные лемехи, наконечники, пяты, лезвия или дефлекторы. Все упомянутые выше элементы имеют очень специфические особенности, что делает их пригодными для тех или иных работ. Например, выбор вогнутости, размеров, степеней твердости или вязкости будет зависеть от механических свойств почвы, которая будет обрабатываться, по этой причине важно получить эту информацию, чтобы в любое время выбрать наилучшую конфигурацию.
В приведенном в качестве примера варианте осуществления настоящего изобретения упомянутая система включает в себя множество датчиков 1, каждый из которых, вследствие их простоты и небольшого размера, может называться "измерительным узлом" или "электронным узлом", как изображено на Фиг. 1. Основной измерительный узел имеет датчики вибрации, чтобы фиксировать поведение элемента, который контактирует с упомянутым измерительным узлом через вибрационный сигнал, который распространяется через упомянутый элемент во время его работы. Таким образом, система по настоящему изобретению базируется предпочтительно на конфигурации датчиков акселерометра в измерительных узлах, хотя в некоторых вариантах выполнения эти узлы имеют информацию, которая является дополнительной или факультативной к информации самого акселерометра, которая поступает от других внешних датчиков, которую система умеет интерпретировать и использовать.
Электронные узлы предназначены для устанавливания в любое из упомянутых выше рабочих орудий для подготовки почвы и/или сева, фиксирования вибраций, полученных в упомянутом рабочем орудии, от контакта с почвой во время работы, и передачи соответствующих измеренных величин в процессорный модуль. Они могут быть установлены на внешней поверхности одного из почвообрабатывающих элементов сельскохозяйственного орудия, такого как диск 2 бороны, изображенный на Фиг. 2, для анализа их поведения, или использования для оценивания группы элементов или корпуса сельскохозяйственного орудия.
Как пример, в приведенной ниже таблице показаны данные, собранные одним из электронных узлов, в этом случае "датчиком 4", при этом упомянутые данные приведены в двух разных записях, или зонах, которые в этом описании упоминаются как "3" и "7" для определенного прохода, который в этом случае обозначен как "11 В". В Таблице в упомянутых записях приведены измеренные величины максимальной PSD (MPSD), частоты, на которой возникает максимальная PSD (FMPSD), и накопленной энергии, которая сохранена как изменяемая энергия.

На Фиг. 3 схематически показана система для управления по настоящему изобретению, в которой предусмотрена сеть связи, которая включает в себя несколько узлов для распределения управляющей информации. Связь между измерительными узлами и основным узлом можно осуществлять с применением проводного соединения или, например, в случае большого количества измерительных узлов, с применением беспроводного соединения в соответствии со схемой, показанной на Фиг. 3. В этом случае измерительные узлы 1 имеют модуль 30 беспроводной связи для передачи множества измеренных величин, полученных из обнаруженного вибрационного сигнала, в основной узел 31, который предпочтительно следует размещать в тракторе сельскохозяйственной машины, хотя в других базовых вариантах осуществления настоящего изобретения основной узел практически интегрирован в портативное электронное устройство, такое как электронный планшет или мобильный телефон. Кроме того, могут быть включены промежуточные узлы 32, которые действуют как мост и передают информацию в основной узел. Этот основной узел выполняет роль хозяина информации, группирует записи датчиков в единой базе данных и делает их доступными для пользователя и системы для анализа и взаимодействия с окружающей средой благодаря этой системе для управления. Вся информация из основного узла отправляется на удаленный центральный сервер 35, где она сохраняется в общей базе данных, доступной с соответствующими ограничениями безопасности и конфиденциальности из основных узлов разных машин.
Факультативно промежуточные узлы могут иметь такие же вычислительные функции, что и основной узел, для предотвращения возможных проблем связи с учетом очень большого количества датчиков, которые в беспроводном режиме могут превысить лимит приема промежуточного узла. Таким образом, удвоение промежуточных узлов гарантирует услугу независимо от количества электронных узлов. Кроме того, хотя основная функция промежуточных узлов действовать как мост, они также могут быть выполнены так, чтобы обеспечить обработку части информации и тем самым уменьшить вычислительную нагрузку на основном узле, которому, когда он получает информацию от очень большого количества датчиков, может понадобиться некоторое время для обработки, что создало бы узкое место.
Системы 33 третьих лиц могут быть подсоединены к системе по настоящему изобретению через единую шину 34, установленную в сельскохозяйственной машине, предпочтительно в тракторе, в соответствии с протоколом связи по последовательной шине или по шине CAN, в зависимости от выбранного варианта выполнения, а также с применением некоторых приводов для динамического регулирования некоторых физических параметров почвообрабатывающих элементов, соблюдая инструкции, отправленные системой для управления. Таким образом, конфигурацию и управление по настоящему изобретению можно настроить для любого типа конечной информационной потребности системы, также настраивая общее количество узлов и датчиков.
Размещение датчиков на сельскохозяйственной машине 40, такой как показана в примере, изображенном на Фиг. 4, где детально показано сельскохозяйственное орудие, прицепленное к трактору (не изображенному), является переменным и зависит от количества и распределения, необходимого оператору в каждом конкретном случае, или в зависимости от возможностей управления почвообрабатывающими элементами и сельскохозяйственной машиной, в частности. Например, размещение рядов позволяет получить информацию из кузова сельскохозяйственной машины, тогда как групповая конфигурация позволяет получить параметры нестабильности внутри машины.
В частности, сельскохозяйственная машина на Фиг. 4 работает с тремя рядами сельскохозяйственных элементов, расположенных в сельскохозяйственном орудии. Первые два ряда 41 и 42 (наиболее близкие к трактору) это дисковые бороны, а последний ряд включает в себя уплотнительный каток 43. Кроме того, четыре датчика 1 были распределены по всей структуре сельскохозяйственного орудия. Таким образом, в этом конкретном примере сельскохозяйственная машина выполняет две различные работы в почве за один проход. Принимая во внимание то, что почвообрабатывающие элементы имеют несколько пригодных для перенастраивания параметров, таких как рабочая глубина, частота вращения или угол атаки, настоящее изобретение позволяет, при получении информации о механическом состоянии почвы, установить наилучшую конфигурацию этих почвообрабатывающих элементов для каждого ряда. Эта конфигурация может быть установлена пользователем в режиме реального времени, или она может быть установлена автоматически в соответствии с информации, которая сохраняется в базе данных относительно той же почвы за предыдущие годы или относительно подобных полей, обработанных теми же или очень подобными сельскохозяйственными машинами.
Например, для почвы, которая была признана твердой, первому ряду 41 сельскохозяйственного орудия можно автоматически присвоить параметры малой глубины и небольшой угол атаки, чтобы выполнить облегченную работу по дисковому боронованию. Для другого из рядов, такого как ряд 42, хотя он выполняет такую же функцию, что и ряд 41, сравнение встроенных датчиков дает возможность узнать, на какой почве выполняется работа, выполненная рядом 41, и таким образом принять различные решения относительно конфигурации, такие как меньший угол атаки и рабочая глубина, которая отличается от первого ряда, уменьшая интенсивность процесса благодаря знанию полученного результата, который соответствует потребностям фермера. В этом случае стоимость работы будет уменьшена благодаря снижению интенсивности процесса с точки зрения необходимой мощности и износа компонентов сельскохозяйственного орудия. Также последний ряд 43, который соответствует катку уплотнителя, будет иметь связанное рабочее уплотнение/оседание, которое будет зависеть от результата работы, измеренной предыдущими датчиками, состояния почвы и подобных операций с удовлетворительными результатами, которые были сохранены в базе данных. Таким образом, можно оптимизировать работу каждого ряда, а таким образом, и сельскохозяйственной машины, гарантируя воспроизводимость работ в подобных условиях.
Система открыта для настраивания количества, расположения или типа разных датчиков и количества узлов, которые получают информацию от датчиков. Таким образом, можно настроить их количество через мобильное приложение или, если оборудование подключено к шине CAN/ISOBUS трактора сельскохозяйственной машины с применением интерфейса пользователя упомянутого трактора. На Фиг. 5 показана блок-схема информации в мобильном приложении, которое содержит один из вариантов осуществления настоящего изобретения, или шина системы CAN/ISOBUS трактора, при этом, после начала процесса 50, процесс переходит к конфигурированию 51 системы, при этом пользователь вводит количество датчиков, расположение, модель и тип сельскохозяйственного орудия сельскохозяйственной машины; потом начинается операция приема измеренных величин 52 и определения считываемых местоположений 53, полученных модулем геолокации. Вся эта информация 54 поступает в приложение или, в случае его отсутствия, в интерфейс пользователя шины системы CAN/ISOBUS трактора сельскохозяйственной машины. С одной стороны, приложение открывает коммуникации 55 мобильного устройства, на котором оно было установлено, чтобы переслать информацию в центральный сервер, а с другой стороны, полученная информация потом записывается 56, где ей присваивается имя 57, что позволяет получить ее позже. Этапы записывания данных и присваивания имен выполняются непрерывно, пока система не выключится, что приведет к тому, что все записанные к этому моменту данные будут отправлены 58 в базу данных, а операция закончится 59.
На Фиг. 6 показана схема передачи информации датчиков в одном из вариантов осуществления настоящего изобретения, при этом количество и распределение датчиков будет зависеть от информации, которую необходимо получить, как описано в предыдущем примере, показанном на Фиг. 4. Поток информации начинается с данных, собранных электронными узлами 1 и геолокационными модулями 63, проходит через полевой компьютер, включающий в себя основной узел 31 упомянутого трактора каждой сельскохозяйственной машины упомянутой системы, и заканчивается в центральном сервере 35 упомянутой системы или на сервере 64 третьих лиц. Существует также обратный путь потока информации, такой, что анализ информации, выполненный на центральном сервере или на сервере третьих лиц, отправляется назад в основной узел, при этом команды 66 управления могут быть отправлены электронными узлами.
Если более детально описывать схему передачи информации, показанную на Фиг. 6, то в этом случае электронный узел 1 имеет датчик 60 акселерометра, память 61, модуль 30 беспроводной связи и другие датчики 62. Информация, полученная датчиками, формируется в виде пакетов данных, которые отправляются в контроллер полевого компьютера основного узла 31, непосредственно или через промежуточный узел 32, который принимает пакеты от любого из электронных узлов, обрабатывает пакеты, анализирует их взаимосвязь, особенно те, которые являются парными, и формирует параметры действия или записывания.
Модуль 63 геолокации имеет модуль связи для сетей LTE/4G/3G/2G, который отправляет спутниковую информацию о местонахождении (GNSS) в контроллер полевого компьютера основного узла, где выполняется синхронизация и спаривания каждой из измеренных величин с информацией о местонахождении.
Вся информация, полученная в основном узле, используется для создания базы данных, которая доступна упомянутой системе для сохранения и подачи этой базы данных на любое электронное устройство, которое было предварительно сконфигурировано. Кроме того, что ее можно отправлять непосредственно в центральный сервер 35 или в серверы 64 прочих производителей, ее также можно отправлять на мобильное устройство 65, с которого, по выбору пользователя, данные загружаются в центральный сервер через подключение к интернету.
Для связи с серверами прочих производителей или с любым элементом, внешним по отношению к системе по настоящему изобретению, контроллер снабжен средством связи ISOBUS, которое может подключаться к средствам связи сельскохозяйственных коммуникаций и интегрировать свою информацию с прочими производителями и контроллерами через стандарт ISOH783.
На Фиг. 7 показана схема создания базы данных 70 в одном из вариантов осуществления настоящего изобретения, при этом информация, полученная электронными узлами 1, расположенными в сельскохозяйственной машине, объединяется с информацией о местоположении, полученной с применением модуля 63 геолокации. В основном, процесс состоит из синхронизации данных из датчиков с информацией о положении. Для этого частота выборки, время записывания и передачи учитывается как функция приложения, поэтому изначально установленная конфигурация параметров времени записывания пакетов и частоты захвата датчиков будут определять полученную выборку и ее точность. Синхронизированные данные сгруппированы в различные пакеты (711, 712, … 713), которые упорядоченно сохраняются в базе данных 70, при этом каждый из пакетов, в свою очередь, содержит несколько измеренных величин GPS (714, 715) и несколько пакетов измеренных величин датчиков (716, 717, … 718).
Настоящим изобретением предоставлены несколько слоев действий, которые могут быть сконцентрированы на трех уровнях, которые описаны ниже.
На первом уровне базовая операция изобретения имеет датчик, который снимает данные о поведении почвообрабатывающего и посевного орудия на поверхности почвы во время прохода сельскохозяйственного орудия. Для этого в одном из вариантов осуществления настоящего изобретения датчик имеет акселерометр и гироскоп, которые регистрируют вибрацию, возникающую при взаимодействии машины с почвой, которая воздействует на все компоненты в результате твердости, влажности почвы или других механических параметров. Обработка зафиксированных вибраций, как описано выше, позволяет определить механическое состояние почвы, связанное с некоторыми механическими параметрами, такими как твердость или пластичность, которые получены в результате указанной обработки.
На втором уровне один из вариантов осуществления настоящего изобретения, который является более полным, чем предыдущий, имеет множество датчиков, распределенных в нескольких точках сельскохозяйственной машины (предпочтительно в сельскохозяйственном орудии и в почвообрабатывающих элементах, хотя некоторые датчики также могут быть установлены в тракторе), которые получают измеренные величины, связанные с разными почвообрабатывающими элементами или группами элементов во время работы. В соответствии с примером распределения датчиков, показанным на примере, изображенном на Фиг. 4, измеренные величины, полученные датчиками 1, связанными с сельскохозяйственным орудием, отправляются в основной узел 31, при этом локальный процессор анализирует, в соответствии с пространственным распределением датчиков, полученные измеренные величины для устанавливания дифференцированных параметров разных точек машины.
Датчики работают отдельно, записывая индивидуальные измеренные величины на каждом проходе сельскохозяйственной машины, что является поверхностным анализом механического состояния почвы, но знание размещения всех датчиков позволяет совместно их оценивать, и позволяет определить дифференцированное поведение сельскохозяйственной машины, разделяя способ, в соответствии с которым выполняется работа, на группы исполнительных механизмов или даже на части по всей машине.
В одном из вариантов осуществления настоящего изобретения использовано продольное группирование датчиков, что позволяет узнать, как первый датчик дает информацию о состоянии почвы до прохода дисков или элементов бороны, а второй датчик, расположенный после первого датчика, позволяет определить изменения в почве после воздействия бороны.
В одном из вариантов осуществления настоящего изобретения использовано поперечное группирование датчиков, что позволяет изменять интенсивность работы разных частей машины, приспосабливая операцию к разным участкам, которые определены, например, более широкими сельскохозяйственными орудиями.
Подобным образом можно действовать с любым элементом, который сейчас встроен в сельскохозяйственные машины, например, представляет интерес управление работой дисков бороны, расположенных в первом ряде сельскохозяйственной машины, с применением датчиков, расположенных в другом ряде, и это, в свою очередь, должно контролироваться из третьего ряда. Благодаря действиям такого типа можно контролировать работу разных компонентов или элементов и частей машины, что является важным фактором при одновременной работе с роботизированными машинами, которые могут действовать и реагировать в зависимости от типа почвы, с которой они соприкасаются, проходя через участок. Таким образом, предпочтение отдается тому, чтобы несколько компонентов работали одновременно, и, воздействуя индивидуально на каждый из них, можно оптимизировать работу по подготовке почвы и уменьшить время и потребления энергии, необходимы даже для одного прохода, что еще больше уменьшает уплотнение почвы, которое происходит при каждом проходе машины.
На третьем уровне, который соответствует одному из вариантов осуществления настоящего изобретения, являющемуся более полным, чем предыдущие, настоящее изобретение взаимодействует с прочими элементами в дополнение к тем, которые описаны выше, такими как конкретные датчики, имеющиеся на рынке, которые улучшают использованные алгоритмы и повышают эффективность системы. Благодаря этому основная система снабжена несколькими входными портами цифровой связи для включения дополнительных сигналов от датчиков влажности, количества отходов, органических веществ и т.п.
Вся информация от датчиков помогает определять механические параметры состояния почвы, а также поведение почвообрабатывающих элементов, получаемые в режиме реального времени процессорным модулем системы.
Процессорный модуль системы может быть реализован в промежуточном узле, в основном узле или распределен между ними. Любая из функций обработки может также выполняться в процессоре, размещенном в промежуточном узле, в основном узле или в центральном сервере.
Кроме того, электронный узел включает в себя модуль геолокации, например, GPS, который генерирует информацию о местоположении для каждой из измеренных величин, полученных датчиками, что предоставляет возможность выявления временных отличий в постепенном изменении почвы и приведет к автоматичному принятию решений в будущем благодаря системе отслеживания. Кроме того, модуль определения местонахождения GPS может быть интегрирован в сельскохозяйственную машину, и именно процессорный модуль связывает измеренные величины, полученные каждым из датчиков, с информацией о местоположении, полученной модулем геолокации.
В этом изобретении использованы несколько возможностей доставки данных. Таким образом, настоящее изобретение можно изменять для отправка информации для считывания на устройства связи пользователей, такие как мобильные телефоны или электронные планшеты, где для этого установлено определенное приложение, или только в электронном виде, когда они взаимодействуют с другим оборудованием, чтобы обеспечить автоматическое конфигурирование в зависимости от информации, полученной из предшествующих случаев с подобными условиями (например, идентичная сельскохозяйственная машина или подобное механическое состояние почвы).
В соответствии с одним из вариантов осуществления настоящего изобретения, система по настоящему изобретению во взаимодействии с другим оборудованием может дополнительно иметь электронную плату для соединения с прочими системами или даже иметь собственный электронный ящик для отправка информации. Таким образом, обе платформы, электронная плата или ящик, позволяют передавать информацию в открытом формате, например, ISOBUS или xml, прочим производителям, с которыми предварительно согласовано его использование, или она интегрирована в закрытом формате, чтобы другие получатели могли интегрировать его в свои машины. После передачи механических параметров почвы, которые определены алгоритмами процессорного модуля, вся информация сохраняется в базе данных центрального сервера, который в соответствии с различными вариантами осуществления настоящего изобретения будет выделенным физическим сервером, или будет практически реализована в облаке, где она будет доступна для дальнейшего анализа компонентов системы и других почв.
В сочетании с детально описанными выше аппаратными элементами, которые включает в себя система по настоящему изобретению, цель оптимизации обработки почвы, использования сельскохозяйственных и посевных орудий требует некоторых алгоритмов в процессорном модуле для управления операциями сбора информации, ее обработки, связи и производительности. Эти алгоритмы работают на двух уровнях. На первом уровне выполняется относительная или локальная обработка, при которой алгоритм работает исключительно в соответствии с тем, что присутствует на почве, анализируя конкретный участок, на котором работает сельскохозяйственная машина, и дифференцированные реакции, которые содержатся в почве, таким образом определяя механическую изменчивость почвы с применением массового анализа определений, полученных датчиками (предпочтительно акселерометрами и гироскопами) электронных узлов. Результатом является относительное определение механического состояния почвы, при этом степень твердости и пластичности касается только почв, которые сейчас обрабатываются. Интерпретация этих данных позволяет определить, кроме степени твердости (что соответствует высоким колебаниям) и степени пластичности (что соответствует низким колебаниям), отказы диска (что соответствует отсутствию данных при наличии информации о датчике), изнашивание (что соответствует вариациям частоты вращения элемента) и срок службы (что соответствует предварительно установленному значению интервалов значений вращения или часов работы).
На втором уровне работы алгоритмы процессорного модуля включают прогнозирование, планирование и отслеживание работ, которые выполняются во время подготовки почвы. Определения переходят от относительных к абсолютным благодаря сбору, управлению и передаче данных разных участков в облачную среду (процесс сбора данных повторяемый и соизмеримый, главным образом частота сельскохозяйственной машины и структура, которая определяет внешнее активирование почвы) достигается сохранение и сравнение разных местоположений/участков с большой пространственной дифференциацией между ними, и отправление в центральный сервер. Центральный сервер обычно имеет производительность обработки данных большую, чем процессоры, которые являются одним целым с промежуточными/основными узлами на борту сельскохозяйственных машин на почве.
После того как процессорный модуль обработает всю информацию по конкретному участку, сравнив полученные измеренные величины с сохраненными измеренными величинами относительно других участков со сравнимыми характеристиками, он отправляет абсолютные вычисления назад в основной узел сельскохозяйственной машины, чтобы перейти к параметризации разного оборудования, к которому он присоединен, и почвы, которая обрабатывается. Одновременно процессорный модуль генерирует карту поведения оборудования и операций, которую можно связать с картой механического поведения почвы.
Вычисления и составления прогнозов, которые выполняет процессорный модуль, основываются на всей информации, которая получена за предыдущие работы (или на по меньшей мере одном начальном учебном периоде) и которая сохранена в базах данных. После получения механических параметров они используются как входные данные для методов анализа на основе искусственного интеллекта (например, нейронных сетей, которые получают прогнозы из физических параметров на основе значений, измеренных датчиками, или на основе функций регрессии, которые анализируют влияние каждой переменной и ее физическую связь с системой) с целью предсказания в реальном времени механического поведения (выход алгоритма) почвы, на которой работают сельскохозяйственные орудия.
Для того, чтобы установить различные типы почвы и соответствующие данные датчиков относительно них, предварительно измеряют сопротивление проникновению, влажность и пластичность с применением имеющихся на рынке датчиков, а значения частот и энергии изучают путем сбора данных для будущей обработки. Таким образом получаются исходные относительные и абсолютные данные, с применением которых система обучается.
Прогнозы исходных данных осуществляются в режиме реального времени, что достигается путем прямого обеспечения процессорного модуля мгновенными показаниями датчиков вибрации, интегрированных в почвообрабатывающие элементы сельскохозяйственных машин, по мере их получения. Измерения получаются упомянутыми датчиками во временной области, но они характеризуются и фильтруются с применением параметров вибрации, вычисленных в частотной области, где прогноз очень богат информацией относительно этого типа сигналов. Информация о частоте это первая параметризация механического поведения, при которой различные длины волн превращаются в энергетическое возбуждение на разных частотах. Другими словами, превращение в частотное пространство позволяет распределить вибрационный сигнал на различные длины волн, из которых получают измеренные величины энергии каждой из них, и, таким образом, самостоятельно анализировать их, чтобы иметь возможность диагностировать, какой физический факт вызывает вибрацию.
В заключение, процессорный модуль связывает эти показания, полученные в режиме реального времени, с выходным значением благодаря взаимосвязи/обучению, заранее определенному для значений, полученных вручную относительно рассматриваемой почвы, и сравнивает с данными за длительный период времени, собранными в базах данных системы.
Частота и время сбора информации датчиками в значительной степени влияют на точность и разрешающую способность информации, которая фиксируется. Кроме того, частота считывания, время упаковывания и время передачи изменяются в зависимости от элементов, которые используются в сельскохозяйственном орудии, и параметров, которые должны быть определены, так что, например, для исследования вибраций нужно значительное количество показаний для частотного исследования сигнала, тогда как сбои вращения или срок службы не требуют этого. В одном из вариантов осуществления настоящего изобретения время считывания, которое используется для создания пакетов записей, выполняется в диапазоне частот от 50 Гц до 500 Гц, другими словами, данные снимаются с датчиков в промежутке времени от 0,25 с и до 20 с. Это обеспечивает, с одной стороны, хорошую точность в частотной области, с интервалами данных на частоте около deltaf=1 Гц в самом плохом случае, и точностью пространственных данных на почвы для наборов данных (пакетов), вычисленных между 0,2 м и 20 м на участке. Размер пакетов варьируется в диапазоне 250-2000 точек данных в зависимости от типа предполагаемой работы, машины и почвообрабатывающих элементов.
Алгоритм группирует упомянутые пакеты данных, полученные в процессорном модуле от такого количества датчиков, которые были установлены в сельскохозяйственной машине. Упомянутые пакеты содержат данные из акселерометра и гироскопа, которые являются характеристиками, объединенными и захваченными совместным и трехмерным образом, что позволяет получить пространственное смещение, которому подвергается каждое положение, контролируемое датчиком по осям X, Y, Z. Таким образом, от каждого датчика акселерометра получаются такие значения: время, АссХ, AccY, AccZ, GirX, GirY и GirZ, таким образом предоставляя информацию относительно скорости изменения и пространственного направления.
На основе вибрации, измеренной по предыдущим значениям, вычисляются механические параметры, такие как пластичность, твердость, отказы вращения компонентов, срок службы или износ компонентов, которые связывают поведение каждого из почвообрабатывающих элементов и сельскохозяйственных орудий в целом с механическим сопротивлением почвы.
Полученные пакеты данных переносят из временной области в частотную область для их обработки как вибрации, определяя параметры в частотах, которые идеально подходят для измерения величины поведения взаимодействия почва-структура, а таким образом, и почвы, которая возбуждается при проходе сельскохозяйственной машины.
Для того, чтобы передавать сигналы из временной области в частотную область, алгоритмы процессорного модуля используют функцию превращения Фурье, потом вычисляют измеренные величины энергии (такие как максимальная накопленная энергия или различные пики энергии на разных частотах), полученные, исходя из сигнала плотности энергии или спектральной плотности мощности (PSD), и получают классификацию колебаний с применением рассчитанных частот и энергий в пределах от 50 Гц до 500 Гц. Измеренные величины энергии можно получить относительно, учитывая минимальные и максимальные значения за несколько первых проходов, в данных, записанных на том же участке в предыдущие даты и записанных в базе данных, или даже устанавливают их вообще, сравнивая их с данными, измеренными другими средствами, такими как пенетрометры и уплотнители.
После того как измеренные величины, полученные во временной области, были перенесены в частотную область, алгоритмы процессорного модуля применяют этап фильтрования, чтобы устранить частоты, присущие вращению, износу или периодическому трению, таким образом, что остаются только частоты, присущие вибрациям, которые вырабатываются взаимодействием орудия и почвы, что позволяет охарактеризовать изменчивость почвы каждого участка. Фильтры в основном основаны на выявлении повторяемости частот, их устранении и, таким образом, уменьшении шума показаний. Например, в одном из вариантов осуществления настоящего изобретения очень низкие частоты устраняются (фильтром высоких частот), чтобы избежать эффекта базовой линии, а высокие частоты, начиная с 200 Гц, устраняются, чтобы избежать ошибочных измеренных величин (фильтром низких частот). В конкретном варианте осуществления фильтр Баттерворта 5-го порядка используется для сигнала от акселерометра для диапазона от 0 Гц до 1 Гц.
Сгруппированная обработка информации позволяет выявлять вариации вибрационного сигнала после воздействия каждого почвообрабатывающего элемента, что отображает поведение каждого элемента в режиме реального времени, поскольку локальный процессор, установленный на борту сельскохозяйственной машины, получает, обрабатывает и показывает всю полученную информацию и расчеты, выполненные мгновенно. Эти изменения в вибрационном сигнале, отображенные данными из гироскопа, позволяют анализировать отличия во вращательных движениях, а таким образом, блокирования почвообрабатывающих элементов, что означает плохую работу сельскохозяйственных орудий и необходимость наблюдать и даже временно прекращать работу для выполнения ремонта или настраивания машины.
Анализ сигналов в частотной области настоящего изобретения используется не только для определения механического состояния почвы, но он также полезен для определения срока экономного использования почвообрабатывающих элементов, установленных в сельскохозяйственном орудии или некоторых частях машины, поскольку ее циклические колебания, т.е. те, которые не касаются почвы, изменяются вследствие износа и структурных изменений элементов, таких как уменьшение диаметров дисков или длины наконечников. Полученные параметры, такие как максимальное значение временного ускорения, максимальная накопленная энергия или различные пики энергии в сигнале PSD спектральной плотности мощности для некоторых частот, позволяют таким образом, с применением обученной нейронной сети, характеризовать каждую группу показаний об износе и поведении орудия или орудий, которые ранее были охарактеризованы в тот момент в зависимости от почвы.
Таким образом, в соответствии со всеми предыдущими обработками, пользователь (фермер) настоящего изобретения получает информацию в режиме реального времени о механическом состоянии почвы, включая пластичность и твердость почвы, поломки почвообрабатывающих элементов, срок службы и изнашивание. Кроме того, вычисления можно уточнить путем включения информации о влажности, полученной внешними датчиками. Например, пользователь получает в одном из вариантов осуществления настоящего изобретения через экран, подключенный к основному узлу, информацию о том, в каких точках (в соответствии с местоположением GPS) на графике твердость выше или ниже, и параметры пластичности, чтобы оценить, является ли работа, выполненная этим сельскохозяйственным орудием, более-менее интенсивной, и таким образом оцениваются изменения в конфигурации почвообрабатывающих элементов, которые предупреждают повреждение оборудования (увеличивая срок службы) из-за истирания или изнашивания, вызванного почвой. Кроме того, для оборудования, соединенного с сельскохозяйственной машиной с возможностью автоматического изменения конфигурации сельскохозяйственного орудия, пользователь получает в электронном виде те же параметры для оценивания степеней свободы машины, такие как глубина обработки, режим работы, частота, интенсивность, расстояние между валами или наклон дисков.
В дополнение к информации и относительных действий, настоящее изобретение масштабирует всю информацию, полученную в облаке через соединение LTE/4G/3G/2G на борту сельскохозяйственной машины, для того, чтобы машина, подключенная к другому оборудованию, могла реагировать, тем самым предоставляя возможность знания и действия в режиме реального времени, определяя состояние почвы в абсолютном режиме. В абсолютном режиме относительные данные сравнивают с сохраненными данными того же участка, чтобы получить абсолютную зависимость для упомянутого участка. Подобным образом эти данные можно сравнить с прочими участками, чтобы получить общее абсолютное изменение, которое позволяет сравнить изменчивость, выявленную на разных участках, регионах и странах, с которой обработка информации достигает обратной связи с параметрами через величину определенной изменчивости. Кроме того, это позволяет относительно узнать о временных изменениях в обработке в течение всего сезона или с участков других лет, а также знать, как решения, принятые в предыдущие годы, изменяются и влияют на текущее состояние определенной почвы. Это означает, что фермер и система могут определить, имели ли предварительные действия желаемый эффект, или требуют изменения.
Сельскохозяйственные машины, в которые встроены предложенные датчики, могут включать бороны, культиваторы, сеялки и множество сельскохозяйственного оборудования и сельскохозяйственных орудий, которые обычно прицепляются к трактору, с целью раскрытия почвы, удаление и упрочнение почвы, ее уплотнение и т.п. В этом случае настоящее изобретение предпочтительно уменьшает количество проходов и точность их выполнения, достигая улучшения в использовании каждого из элементов, которые подходят для работы, касающейся подготовки почвы к севу, и тем самым повышают производительность и улучшают результат работы.
Механические параметры, полученные непосредственно или опосредованно с применением показаний датчиков, позволяют фермеру в режиме реального времени изменять параметры применения сельскохозяйственной операции или работы или записывать состояние почвы и ее условия во время выполнения операции для дальнейшего отслеживания их работы.
Настоящее изобретение имеет много преимуществ, среди которых такое, что позволяет фермеру оперативно реагировать на сельскохозяйственное орудие, не ожидая обработки информации, путем получения в режиме реального времени информации о механическом состоянии почвы, которая включает измеренные величины, связанные с твердостью или кажущейся плотностью. Кроме того, также получают информацию о поведении используемого почвообрабатывающего элемента, которая позволяет оценить его рабочее состояние и определить возможные засорения, а также его износ или срок службы, чтобы соблюсти оптимальный срок замены.
Кроме того, в одном из вариантов осуществления настоящего изобретения вся эта информация, которая предоставлена пользователю, чтобы помочь ему принимать решения, используется для взаимодействия непосредственно с выполняемой работой, таким образом начиная процесс роботизированного взаимодействия с устройством управления машиной. Таким образом, полученная информация передается на машину, чтобы другие элементы машины могли автоматически приводить в действие свои компоненты и изменять режим работы в зависимости от того, как датчики определяют состояние почвы. Эта функция имеет решающее значение для новой эры автоматических машин, которые в настоящее время автоматически управляют тракторами, но за короткий промежуток времени они смогут автоматизировать выполнение всех сельскохозяйственных работ.
Настоящее изобретение не должно ограничиваться описанным здесь вариантом осуществления. На основании этого описания специалисты в этой отрасли могут осуществлять другие мероприятия. Соответственно, объем изобретения определен приложенной формулой изобретения.

Группа изобретений относится к сельскому хозяйству. Способ определения механического состояния сельскохозяйственных угодий включает этапы: a) получение с применением измерительного средства, размещенного в почвообрабатывающем элементе сельскохозяйственной машины, измеренных величин вибрационного сигнала, при этом упомянутый вибрационный сигнал вырабатывается в результате контакта почвообрабатывающего элемента с сельскохозяйственным угодьем во время обработки почвы; b) отправка средством связи измеренных величин, полученных из вибрационного сигнала, сгруппированных в пакеты данных, в процессорный модуль; c) превращение процессорным модулем измеренных величин вибрационного сигнала, сгруппированного в пакеты данных, в частотный сигнал; d) получение сигнала спектральной плотности мощности (PSD), исходя из частотного сигнала; e) сравнение первого энергетического профиля, который соответствует амплитудным измеренным величинам спектральной плотности мощности PSD-сигнала в определенной полосе частот, с множеством энергетических профилей базы данных, при этом множество энергетических профилей базы данных соотнесено с разными механическими состояниями земельного участка, определенными в зависимости от предшествующих измеренных величин с применением пенетрометра; и f) определение механического состояния сельскохозяйственного угодья в результате сравнения первого энергетического профиля с множеством энергетических профилей, которые сохраняются в базе данных. Система для осуществления способа определения механического состояния сельскохозяйственных угодий, включающая в себя: сельскохозяйственную машину с по меньшей мере одним почвообрабатывающим элементом; измерительное средство, включающее в себя по меньшей мере один акселерометр и гироскоп, расположенный в по меньшей мере одном почвообрабатывающем элементе, выполненное так, чтобы обеспечить измерение вибрационного сигнала, который образуется в результате контакта почвообрабатывающего элемента с сельскохозяйственным угодьем во время этапа обработки почвы; основной узел связи, размещенный в сельскохозяйственной машине, выполненный так, чтобы обеспечить прием измеренных величин из измерительного средства; и удаленный центральный сервер, выполненный так, чтобы обеспечить получение информации, основанной на измеренных величинах, которая отправляется из основного узла каждой сельскохозяйственной машины, и сохранение ее в базе данных, которая сохраняет множество энергетических профилей; и - процессорный модуль, связанный с измерительным средством через основной узел, выполненный так, чтобы обеспечить группирование в пакеты данных измеренных величин, полученных из вибрационного сигнала; превращение измеренных величин вибрационного сигнала, сгруппированного в пакеты данных, в частотный сигнал; получение спектральной плотности мощности PSD, исходя из частотного сигнала; сравнения первого энергетического профиля, который соответствует амплитудному измерению спектральной плотности мощности PSD-сигнала в определенной полосе частот, с множеством энергетических профилей из базы данных, при этом множество энергетических профилей из базы данных соотнесено с разными механическими состояниями земельного участка, определенными в зависимости от предшествующих измеренных величин с применением пенетрометра; и определения механического состояния сельскохозяйственных угодий в результате сравнения первого энергетического профиля с множеством энергетических профилей, которые сохраняются в базе данных. Обеспечивается эффективное определение в реальном времени механического состояния почвы для оптимизации использования сельскохозяйственных орудий для подготовки почвы сева. 2 н. и 13 з.п. ф-лы, 4 ил.
1. Способ определения механического состояния сельскохозяйственных угодий, отличающийся тем, что включает этапы:
a) получение с применением измерительного средства (1), размещенного в почвообрабатывающем элементе (2) сельскохозяйственной машины (40), измеренных величин вибрационного сигнала, при этом упомянутый вибрационный сигнал вырабатывается в результате контакта почвообрабатывающего элемента с сельскохозяйственным угодьем во время обработки почвы;
b) отправка средством связи (30) измеренных величин, полученных из вибрационного сигнала, сгруппированных в пакеты данных, в процессорный модуль;
c) превращение процессорным модулем измеренных величин вибрационного сигнала, сгруппированного в пакеты данных, в частотный сигнал;
d) получение сигнала спектральной плотности мощности (PSD), исходя из частотного сигнала;
e) сравнение первого энергетического профиля, который соответствует амплитудным измеренным величинам спектральной плотности мощности PSD-сигнала в определенной полосе частот, с множеством энергетических профилей базы данных, при этом множество энергетических профилей базы данных соотнесено с разными механическими состояниями земельного участка, определенными в зависимости от предшествующих измеренных величин с применением пенетрометра; и
f) определение механического состояния сельскохозяйственного угодья в результате сравнения первого энергетического профиля с множеством энергетических профилей, которые сохраняются в базе данных.
2. Способ по п. 1, отличающийся тем, что механические состояния, присвоенные каждому энергетическому профилю в базе данных в зависимости от предшествующих измеренных величин с применением пенетрометра, включают степень твердости и степень пластичности на основе предшествующего измерения с применением пенетрометра.
3. Способ по любому из предшествующих пунктов, который включает этапы:
- отправка измеренных величин измерительного средства в основной узел (31) связи, размещенный в сельскохозяйственной машине;
- отправка информации на основе измеренных величин из основного узла в центральный сервер (35); и
- сохранение на центральном сервере информации на основе измеренных величин, отправленных основным узлом каждой сельскохозяйственной машины.
4. Способ по любому из предшествующих пунктов, который включает определение, с применением процессорного модуля, состояния почвообрабатывающего элемента согласно изменению, выявленному в частоте вращения почвообрабатывающего элемента, при этом состояние почвообрабатывающего элемента выбирают из состояния блокирования почвообрабатывающего элемента или состояния с определенной степенью износа.
5. Способ по любому из предшествующих пунктов, который включает модифицирование, с применением исполнительного механизма, системы для управления физическими параметрами почвообрабатывающего элемента в зависимости от определенного механического состояния сельскохозяйственного угодья, при этом физический параметр выбирают из следующих: рабочая глубина, угол атаки почвообрабатывающего элемента, расстояние между почвообрабатывающими элементами, давление почвообрабатывающего элемента и скорость вращения почвообрабатывающего элемента.
6. Способ по любому из предшествующих пунктов, который включает этап частотного фильтрования, на котором устраняется одна или несколько повторяющихся частот частотного сигнала, что соответствует вибрациям, свойственным работе почвообрабатывающего элемента.
7. Система для осуществления способа определения механического состояния сельскохозяйственных угодий по п. 1, включающая в себя:
- сельскохозяйственную машину (40) с по меньшей мере одним почвообрабатывающим элементом (2);
- измерительное средство (1), включающее в себя по меньшей мере один акселерометр и гироскоп, расположенный в по меньшей мере одном почвообрабатывающем элементе, выполненное так, чтобы обеспечить измерение вибрационного сигнала, который образуется в результате контакта почвообрабатывающего элемента с сельскохозяйственным угодьем во время этапа обработки почвы;
- основной узел (31) связи, размещенный в сельскохозяйственной машине, выполненный так, чтобы обеспечить прием измеренных величин из измерительного средства; и
- удаленный центральный сервер (35), выполненный так, чтобы обеспечить получение информации, основанной на измеренных величинах, которая отправляется из основного узла каждой сельскохозяйственной машины, и сохранение ее в базе данных, которая сохраняет множество энергетических профилей; и
- процессорный модуль, связанный с измерительным средством через основной узел, выполненный так, чтобы обеспечить группирование в пакеты данных измеренных величин, полученных из вибрационного сигнала; превращение измеренных величин вибрационного сигнала, сгруппированного в пакеты данных, в частотный сигнал; получение спектральной плотности мощности PSD, исходя из частотного сигнала; сравнения первого энергетического профиля, который соответствует амплитудному измерению спектральной плотности мощности PSD-сигнала в определенной полосе частот, с множеством энергетических профилей из базы данных, при этом множество энергетических профилей из базы данных соотнесено с разными механическими состояниями земельного участка, определенными в зависимости от предшествующих измеренных величин с применением пенетрометра; и определения механического состояния сельскохозяйственных угодий в результате сравнения первого энергетического профиля с множеством энергетических профилей, которые сохраняются в базе данных.
8. Система по п. 7, отличающаяся тем, что средство связи включает в себя по меньшей мере один промежуточный узел (32), расположенный между измерительным средством и основным узлом (31), выполненный так, чтобы обеспечить прием измеренных величин измерительного средства и пересылку этих измеренных величин в основной узел, действуя как мост.
9. Система по любому из пп. 7, 8, которая включает в себя модуль (30) беспроводной связи, связанный с измерительным средством, размещенным в каждом почвообрабатывающем элементе, выполненный так, чтобы обеспечить отправку измеренных величин измерительных средств в следующий узел, при этом следующий узел выполнен так, чтобы обеспечить прием и передачу беспроводной связью.
10. Система по п. 7, отличающаяся тем, что процессорный модуль включает в себя основной процессор, размещенный в основном узле.
11. Система по п. 8, отличающаяся тем, что процессорный модуль включает в себя по меньшей мере один локальный процессор, размещенный в промежуточном узле.
12. Система по любому из пп. 7-10, отличающаяся тем, что процессорный модуль включает в себя систему управления с по меньшей мере одним приводом, связанным с почвообрабатывающим элементом, выполненную так, чтобы обеспечить изменения физических параметров почвообрабатывающего элемента.
13. Система по любому из пп. 7-12, отличающаяся тем, что основной узел является виртуальным узлом, реализованным в портативном электронном устройстве, которое выбрано из мобильного телефона и электронного планшета.
14. Система по любому из пп. 7-13, отличающаяся тем, что дополнительно содержит модуль геолокации (63), выполненный так, чтобы обеспечить определение местонахождения, где была получена каждая из измеренных величин, полученных из вибрационного сигнала.
15. Система по любому из пп. 7-14, отличающаяся тем, что сельскохозяйственная машина включает в себя трактор и по меньшей мере одно из сельскохозяйственных орудий, таких как культиватор, сеялка или плуг; и при этом почвообрабатывающие элементы сельскохозяйственной машины выбраны из таких как диски, лемехи, бороны, наконечники или отвалы.
| US 2006276949 A1, 07.12.2006 | |||
| WO 2015164791 A1, 29.10.2015 | |||
| US 2016262300 A1, 15.09.2016 | |||
| WO 2016136213 A1, 01.09.2016 | |||
| WO 2017049186 A1, 23.03.2017 | |||
| УСТРОЙСТВО ДЛЯ ВНУТРИПОЧВЕННОГО ИЗМЕРЕНИЯ АГРОТЕХНОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК ПАХОТНОГО СЛОЯ ПОЧВЫ В ДВИЖЕНИИ | 2013 |
|
RU2537908C2 |
| Устройство для оперативного контроля твердости почвы | 1985 |
|
SU1302187A1 |

