Изобретение относится к области машиностроения и может быть использовано в грузоподъемных механизмах, в частности лебедках для спускоподъемных операций, используемых в условиях изменяемой нагрузки, например при океанологических исследованиях, проводимых на маломерных судах.
Проведение исследований в океане, как правило, связано с необходимостью подъёма с глубины и опускания на глубину различных приборов, таких как донные станции, с набором измерительной аппаратуры и аккумуляторами, излучающие системы, часто также с аккумуляторной батареей, зонды, оснащённые датчиками физических полей при исследованиях вертикальной стратификации океанологических параметров и другие. При этом в зависимости от решаемых задач может изменяться в широком диапазоне как масса используемого оборудования от единиц до десятков килограмм, так и глубина погружения, которая может измеряться тысячами метров. Для обеспечения таких работ с опускаемым под воду оборудованием применяют различные лебёдки, которые должны обеспечивать работу с борта судна в условиях волнения, что означает переменную с частотой качки судна нагрузку на лебёдку, при этом максимальная величина силы, которой нагружен выбираемый лебёдкой трос, может превышать силу веса поднимаемого оборудования. Тенденции последних лет, связанные с применением процессорной техники и литиевых аккумуляторных батарей, привели к снижению массы океанологического оборудования, за счёт чего для широкого круга исследовательских задач оказалось возможным использовать маломерные суда, которые, как правило, штатными лебёдками для океанологических исследований не оборудованы, что заставляет исследователей устанавливать такие лебёдки самостоятельно, принимая во внимание необходимые требования к таким лебедкам, определяемые в том числе и условиями использования. Так, с целью минимизации массы лебёдки для её привода наиболее рационально использовать высокооборотный электромотор, при этом для получения конструктивно приемлемых величин угловой скорости вращения барабана необходим редуктор частоты вращения. Кроме того, для отдачи максимальной мощности с высоким КПД моторы должны работать с постоянной частотой вращения, то есть возникает необходимость наличия редуктора с переменным передаточным отношением. Учитывая, что при погружении оборудования под действием собственного веса, возможна ситуация, когда лебёдка должна работать в тормозном режиме, следует иметь систему, утилизирующую выделяемую при торможении энергию. Также следует отметить, что, при использовании маломерных судов, не оборудованных, как правило, бортовым генератором энергии, работа лебёдки обеспечивается от аккумуляторов, а с учётом ограниченной энергоёмкости аккумуляторных батарей приобретает актуальность задача использования выделяющейся при работе лебёдки в тормозном режиме энергии для зарядки аккумуляторов.
Отметим также, что если рассмотреть лебёдку с барабаном постоянного радиуса R, на котором размещена петля перемещаемого троса, к концу которого прикреплено оборудование массой m, тогда потребная мощность N мотора лебёдки определится как
N = m*g*R*ω (1)
где g – ускорение свободного падения, ω – угловая скорость вращения барабана лебёдки. Из (1) следует, что при постоянной мощности N мотора лебёдки и при переменной величине массы оборудования m необходимо изменять угловую скорость вращения барабана лебёдки ω.
Известны различные типы лебёдок, отличающиеся грузоподъёмностью и типом применяемого приводного двигателя, в основном применяются лебёдки с гидравлическим приводом, например, лебёдка грузоподъёмная АРЕ12, грузоподъёмность 1200 кг, требует подключения к гидросистеме с давлением 150 Бар и расходом 40 л/мин. В составе лебёдки имеется гидромотор и планетарный редуктор (https://www.comeup.ru/catalogue/681910/). Однако, применение лебёдок с гидромотором, ограничено по причине отсутствия на маломерных судах гидросистемы; установку же гидросистемы на маломерное судно следует признать нецелесообразной по причине технической и эксплуатационной сложности.
Известны лебёдки с электроприводом, например, лебёдка ТЛ 7Б 1 электрическая, грузоподъёмность 4500 кг, мощность электродвигателя 15 кВт, масса лебёдки составляет 1600 кг (http://tsr-nsk.ru/catalog/lifting/electric-winches/electric-winches_1384.html). Лебёдка содержит раму, размещённые на раме приводной электродвигатель, соединённый с редуктором, который соединён с барабаном для намотки каната, а также тормоз. Для питания электромотора применяется переменный ток частотой 50 Гц и напряжением 380 В. Однако, лебёдка не содержит устройств, позволяющих согласовать параметры электропривода с параметрами рабочей нагрузки, что снижает её эффективность, также не предусмотрена и возможность рекуперации энергии при опускании грузов.
Известна швартовная лебёдка фирмы «Товимор» (https://trans-service.org/ru.php?section=info&page=s_s_u&subpage=sud_vspom_meh_04-03). Лебёдка содержит приводной электромотор с тремя скоростями вращения, обеспечивающий ступенчато изменяемую скорость вращения, соединённый с двухскоростным редуктором, переключение передаточного отношения которого осуществляется с помощью электромагнитной муфты, и тормоз. Редуктор соединён с барабаном для намотки каната. С целью улучшения согласования параметров приводного мотора с нагрузкой барабана редуктор выполнен двухскоростным, а мотор, за счёт переключения числа пар работающих полюсов, имеет три скорости вращения. Управление лебёдкой осуществляется с помощью колонки командоконтроллера. Таким образом, лебёдка может работать в 6 режимах работы, различающихся соотношением крутящего момента на барабане и угловой скорости вращения барабана, то есть конструкция лебедки обеспечивает работу со ступенчато изменяемым передаточным отношением. Данное устройство, лебёдка фирмы «Товимор», рассматривается как наиболее близкий аналог.
Описанная лебёдка имеет механически сложную конструкцию, при этом полностью согласовать параметры электропривода с параметрами рабочей нагрузки при использовании электромагнитной муфты, удаётся только в 6 точках нагрузочной кривой, что снижает эффективность работы лебёдки, а возможность рекуперации энергии при опускании грузов не предусмотрена. Наличие дополнительных обмоток мотора и передач редуктора увеличивает их массу, а переключающие устройства усложняют конструкцию и увеличивают стоимость.
Для улучшения эксплуатационных параметров и снижения массы устройства предлагается конструкция лебедки, в которой для улучшения согласования параметров приводного мотора с изменяющейся нагрузкой барабана дополнительно установлен турботрансформатор крутящего момента, в котором рабочей средой является воздух (далее ТТ), что позволяет получить автоматически плавно изменяемую величину передаточного отношения от мотора к барабану лебёдки для наиболее полного использования возможностей приводного двигателя с постоянной скоростью вращения при решении задач в условиях изменяющегося веса нагрузки, и соответственно, крутящего момента на на барабане.
Заявляемая лебедка включает систему управления, приводной электромотор, соединённый с редуктором, барабаном и тормозом, при этом барабан снабжен датчиком угловой скорости, а между приводным электромотором и редуктором установлен турботрансформатор, размещенный в заполненном воздухом корпусе, содержащим тороидальный формирователь потока, насосное колесо с прямыми лопатками, соединенное с выходным валом электромотора и турбинное колесо с прямыми лопатками, соединенное с входным валом редуктора, расположенный между турбинным и насосными колесами реактор, состоящий из поворотных прямых лопаток, установленных на осях, закрепленных на тороидальном формирователе потока и через шестерни соединенных с зубчатым колесом, расположенном в корпусе, при этом на корпусе установлен сервопривод, с которым жестко соединена одна из осей поворотных лопаток, а система управления включает процессор соединенный с сервоприводом, датчиком угловой скорости барабана, переключателем и тормозом, а также с электронным регулятором скорости, соединённым с мотором через переключатель.
Заявляемая лебёдка с турботрансформатором (ТТ), рабочей средой которого является воздух, обеспечивает согласование величин угловой скорости и крутящего момента приводного электромотора с необходимыми величинами угловой скорости и крутящего момента барабана с учётом передаточного отношения редуктора.
В качестве приводного электромотора устанавливают, например, отличающиеся хорошими характеристиками высокооборотные бесколлекторные моторы, обладающие малой удельной массой, высокими надёжностью и кпд, низкой стоимостью.
Лебедка может быть дополнительно оборудована пультом дистанционного управления и включать аккумуляторную батарею, через переключающее устройство подключенную к приводному электромотору.
Ниже представлена схема одного из возможных вариантов заявляемой лебедки с установленным турботрансформатором.
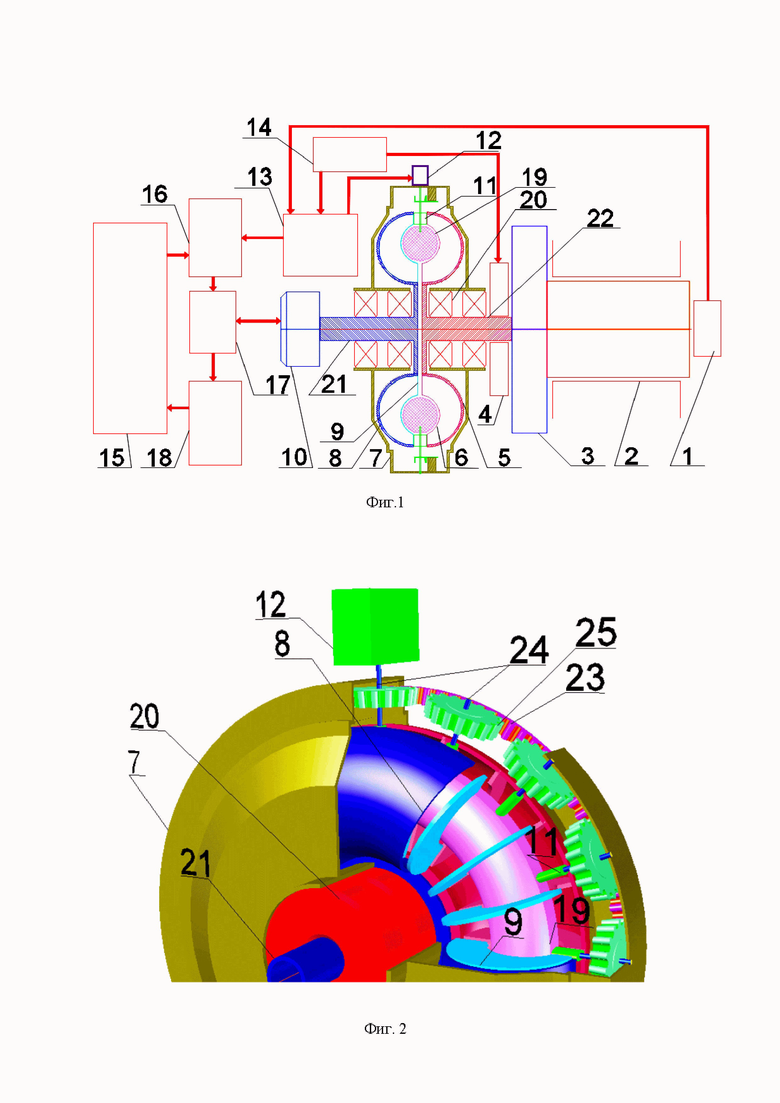
На Фиг.1 схема лебедки: 1 – датчик угловой скорости; 2 – барабан для намотки троса; 3 – редуктор; 4 – тормоз; 5 – турбинное колесо; 6 – лопатка турбины; 7 – корпус турботрансформатора; 8 – насосное колесо; 9 – лопатка насосного колеса; 10 – приводной электромотор; 11 – поворотная лопатка реактора; 12 – сервопривод; 13 – процессор; 14 – пульт дистанционного управления; 15 – аккумулятор; 16 – электронный регулятор скорости; 17 – переключатель; 18 – выпрямитель; 19 – тороидальный формирователь потока; 20 – подшипник; 21 – входной вал; 22 – выходной вал.
На Фиг 2 представлена схема турботрансформатора крутящего момента, где 7 – корпус ТТ; 8 – насосное колесо; 9 – лопатка насосного колеса; 11 – поворотная лопатка реактора; 12 – сервопривод; 19 – тороидальный формирователь потока ТТ; 20 – подшипник; 21 – вал насосного колеса; 23 – коническое зубчатое колесо; 24 – ось поворотной лопатки; 25 - коническая зубчатая шестерня.
Заявляемое устройство включает барабан 2 для намотки троса, к концу которого присоединяется опускаемое на лебёдке оборудование. Барабан 2 соединён с выходным валом редуктора 3, содержащего, например, несколько планетарных ступеней, соединённых последовательно, с общим передаточным отношением, определяемым необходимой частотой вращения барабана 2. На входном валу редуктора 3, соединённым с выходным валом ТТ, установлен тормоз 4, например, электромагнитный, который может быть привёдён в действие по команде оператора, например, с помощью пульта дистанционного управления 14. Ручной или автоматический режим работы устанавливаются переключателем. Входной вал ТТ соединён с валом высокооборотного электромотора 10. Электромотор 10 соединён с переключателем 17, который, по команде, передаваемой процессором 13, подключает выводы мотора 10 либо к электронному регулятору скорости 16, либо к выпрямителю 18, подключенному к аккумулятору 15. Электронный регулятор скорости 16, запитан от аккумулятора 15 и получает сигнал управления от процессора 13, которым управляет оператор, например, с помощью пульта дистанционного управления 14.
Лебёдка может работать в двух режимах: опускание оборудования на заданную глубину и подъём оборудования.
В процессе опускания, под действием веса оборудования, происходит сматывание троса с барабана 2. При этом барабан, вращаясь, приводит во вращение валы редуктора 3, который вращает турбинное колесо 5, установленное на подшипниках 20 в корпусе 7, за счёт чего в корпусе 7 ТТ создаётся поток воздуха, обтекающего лопатки 9 насосного колеса 8, установленного в корпусе 7 на подшипниках 20, вследствие чего насосное колесо 8 приходит во вращение и вращает вал электромотора 10. В режиме опускания турбинное колесо исполняет функции насосного, а насосное колесо – функции турбинного. При этом на выводах электромотора мотора 10 возникает переменное напряжение, а переключатель 17 подключает выводы электромотора 10 к трёхфазному выпрямителю 18, собранному, например, по схеме Ларионова и подключенному к аккумулятору 15. При этом переключатель 17 отключает выводы электронного регулятора скорости от выводов электромотора 10. Переменное напряжение, генерируемое электромотором 10, используется, таким образом, для подзарядки аккумулятора 15.
В процессе подъёма оборудования выводы электромотора 10 с помощью переключателя 17 отключаются от выпрямителя 18 и подключаются к электронному регулятору скорости 16, которым управляет процессор 13. При этом оператор, с помощью пульта дистанционного управления 14, задаёт необходимую скорость подъёма оборудования, а, следовательно, и необходимую частоту вращения барабана 2, текущая величина которой измеряется датчиком угловой скорости 1, соединённым с процессором 13. Таким образом, вырабатывается сигнал рассогласования между заданной и текущей частотой вращения барабана 2, на основании которого процессор 13 вырабатывает сигнал управления электронным регулятором скорости 16, к выводам которого подключен электромотор 10, который приводит во вращение насосное колесо 8 ТТ, при вращении которого создаётся поток воздуха, обтекающего лопатки 6 турбинного колеса 5, вследствие чего турбинное колесо 5 приводит во вращение входной вал редуктора 3, вращающего, в свою очередь, барабан 2, наматывающий трос, на конце которого закреплено поднимаемое оборудование.
Лебедка включает стандартные серийно выпускаемые элементы конструкции, набор которых с необходимыми характеристиками подбирают в зависимости от поставленных задач и требуемых выходных характеристик.
Отметим, что известен турботрансформатор, в котором насосное и турбинное колеса установлены в корпусе, заполненном жидкостью (масло) – гидротрансформатор.
Один из основных недостатков гидротрансформатора заключаются в снижении кпд при отклонении скорости вращения выходного вала от расчётной, а также резкое падения кпд при изменении направления вращения выходного вала, практически исключающее применение обычного гидротрансформатора в системах с переменным направлением вращения. Снижение кпд при отклонении скорости вращения выходного вала от расчётной, и, особенно, при измени направления вращения, вызвано срывом потока на лопатках турбины, насоса и реактора при отклонении режима течения жидкости от расчётного. Снижение кпд в ряде случаев настолько велико, что приходится применять несколько гидротрансформаторов, каждый из которых рассчитан на некоторый, более узкий диапазон изменения частоты вращения выходного вала; при этом неработающие трансформаторы отключаются – либо с помощью фрикционных муфт, либо за счёт слива рабочей жидкости из полости трансформатора, что значительно усложняет конструкцию. Кроме этого, в случае применения обычного гидротрансформатора в качестве устройства, изменяющего соотношение крутящего момента и угловой скорости вращения барабана лебёдки, в режимах, требующих значительного преобразования крутящего момента, из-за сопутствующего снижения кпд, необходимо применять охлаждение рабочей жидкости для утилизации выделяющейся энергии, а передача энергии от турбины к насосному колесу будет сопровождаться значительным снижением кпд.
Известно, что размеры выполненных гидротрансформаторов определяются величиной развиваемого на выходном валу момента и частотой вращения входного вала, при этом в литературе [Гидравлика, гидромашины и гидроприводы/Т.М. Башта, С.С. Руднев и др. – М.: Машиностроение, 1982. – 423с] вводится параметр λ и определяется зависимость следующего вида:
λ = M /ρ*n2*D5 (1),
где M – момент на входном валу гидротрансформатора, ρ – плотность рабочей жидкости, n – частота вращения входного вала, D – диаметр рабочей полости гидротрансформатора. Зависимость (1) позволяет рассчитывать размер D вновь проектируемого гидротрансформатора при заданных величинах ρ M и n на основании параметров существующего гидротрансформатора, для которого известны величины ρ1, M1, n1, D1 и вычисляется параметр λ1. Исходя из условия λ = λ1 определяется D вновь проектируемого трансформатора.
Так, например, взяв в качестве существующего гидротрансформатор У358015А [Приводы машин. Справочник/В.В. Длоугий, Т.И. Муха и др. – Л.: Машиностроение, Ленинг. отд-ние, 1982. – 383с] с номинальной мощностью 54.3 кВт, номинальной частотой вращения n1 = 157 с-1 (1500 об/мин), моментом на входном валу M1 = 346 Н*м, плотностью рабочей жидкости ρ1 = 800 кг/м3 и величиной диаметра D1 = 0.34 м получим величину λ1 = 0.00385; если рассчитать величину D для гидродинамически подобного гидротрансформатора с параметрами: номинальная мощность 2 кВт, номинальная частота вращения 1570 с-1 (15000 об/мин), момент на входном валу М = 1.27 Н*м, то получим, что D ≈ 0.045 м. Рабочее колёс столь малого диаметра будет иметь лопатки малой высоты, при этом относительный размер зазоров между лопатками рабочих колёс и корпуса, достижимый при существующем уровне производства, становится большим, помимо этого возрастает относительная величина шероховатости межлопаточных каналов рабочих колёс, что вызывает снижение кпд. Также следует отметить технические трудности обеспечения надёжности и большого срока службы уплотнения входного вала гидротрансформатора, вращающегося с большой угловой скоростью.
При этом, при применении в качестве рабочей среды трансформатора воздуха, а не масла, размеры рабочих колёс становятся приемлемыми, и исчезает необходимость применения контактных уплотнений, что упрощает эксплуатацию и повышает надёжность.
Установка турботрансформатора, рабочей средой которого является воздух, в заявляемой конструкции лебедки позволяет получить переменную величину передаточного отношения для наиболее полного использования возможностей приводного двигателя, в частности, бесколлекторного мотора, при решении различных задач в условиях изменяющихся по весу нагрузок, вызывающих изменение крутящего момента.
При заданной располагаемой мощности приводного двигателя Nр потребная для подъёма оборудования массой m мощность Nп определяется как
Nп = k*m*g*ωБ (2), где
g – ускорение свободного падения, k - коэффициент, зависящий от диаметра навивки троса на барабан 2, ωБ – частота вращения барабана 2. При этом должно выполняться условие
Nр = Nп (3).
Очевидно, что при изменении массы оборудования m для выполнения условия (3) требуется обеспечить соответствующее изменение величины ωБ. Однако, как отмечалось выше для обеспечения наилучших параметров работы высокооборотный электродвигатель 10, предложенный для применения в качестве приводного мотора в заявляемой конструкции, должен работать с оптимальной постоянной частотой вращения, при этом ТТ, включенный по схеме между приводным двигателем 10 и редуктором 3, вращающим барабан 2 обеспечивает необходимое изменение частоты вращения в зависимости от изменения нагрузки, возникающей из-за изменения массы оборудования m. Известные конструкции гидротрансформаторов, отличающиеся изогнутыми лопатками рабочих колёс и реактора, не могут быть эффективно использованы по причине малых значений кпд в режиме изменения направления вращения барабана 2, то есть при опускании груза, и задача рекуперации энергии не может быть осуществлена с должной эффективностью.
При этом известны конструкции гидродинамических передач, так называемые гидромуфты, отличающиеся прямыми лопатками, имеющие высокий кпд на номинальном режиме работы и одинаково хорошо работающие при изменении направления вращения, то есть, передающие мощность с малыми потерями в любом направлении, при этом функционально насосное колесо и турбинное колесо меняются местами. Однако, из-за отсутствия реактора, гидромуфта не может изменять крутящий момент, развиваемый приводным двигателем. С целью преодоления данного недостатка в конструкцию ТТ введён реактор, содержащий прямые лопатки 11 и сервопривод 12, осуществляющий поворот лопаток 11. При этом сервопривод 12 соединён с удлинённой осью 24 одной из лопаток 11, на которой также закреплена шестерня 25, входящая в зацепление с зубчатым колесом 23, установленном в корпусе 7. В зацеплении с колесом 23 находятся также все шестерни 25 всех лопаток 11 реактора. Таким образом, сервопривод 12, поворачивая одну из лопаток реактора, вызывает синхронный поворот всех лопаток 11 реактора. При этом в случае, если при работе лебёдки с нагрузкой (подъём груза), потребный крутящий момент на приводном двигателе 10 окажется меньше максимального момента, который может обеспечить установленный приводной двигатель, то ТТ может работать в режиме гидромуфты, при этом лопатки реактора должны быть установлены в положение «по потоку»; в случае, если потребный крутящий момент окажется больше, чем максимальный крутящий момент приводного двигателя, турбинное колесо ТТ будет вращаться с меньшей угловой скоростью, чем в предыдущем случае, а приводной двигатель окажется перегруженным; в этом случае лопатки реактора необходимо повернуть на угол, обеспечивающий большую закрутку потока; при этом крутящий момент на турбинном колесе возрастает, а угловая скорость снижается, причём выполняется условие
Мд*ωд = Мт*ωт*η,
Где Мд – крутящий момент приводного двигателя, ωд – угловая скорость вращения двигателя, Мт – крутящий момент на валу турбинного колеса, ωт – угловая скорость турбинного колеса, η – кпд ТТ.
При работе лебёдки в режиме рекуперации (например, опускание оборудования под действием силы тяжести) направление вращения турбинного и насосного колёс меняется на противоположное, направление потока также меняется на противоположное; однако эти явления не вызывают снижения кпд ТТ в связи с тем, что колёса оснащены прямыми лопатками, а лопатки реактора могут быть повёрнуты на любой, требующийся в конкретной ситуации, угол. ТТ оказывается инвариантным как по направлению вращения колёс, так и по направлению передаваемой мощности. Следует добавить, что для организации воздушного потока в конструкцию ТТ введен тороидальный формирователь воздушного потока 19, одновременно предоставляющий опору для осей 24 лопаток реактора 11 и фиксируемый осями 24 в корпусе 7.
Таким образом, предлагаемая конструкция лебёдки отличается от прототипа возможностью согласования параметров приводного мотора (оптимальные, с точки зрения максимального кпд крутящий момент на валу и угловая скорость вала) с параметрами, требуемыми на барабане в условиях изменяемой нагрузки, за счёт чего достигается экономия энергии, а также возможность осуществления рекуперации энергии в процессе опускания нагрузки, что ведёт к дополнительной экономии энергии, что, в свою очередь, актуально в условиях работы от аккумуляторной батареи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Турботрансформатор | 2024 |
|
RU2822350C1 |
| ГИДРОМЕХАНИЧЕСКАЯ АВТОМАТИЧЕСКАЯ МНОГОСТУПЕНЧАТАЯ КОРОБКА ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2585093C1 |
| ГИДРОДИНАМИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ КРУТЯЩЕГО МОМЕНТА ДЛЯ КОРОБКИ ПЕРЕДАЧ | 2005 |
|
RU2294469C1 |
| Гидромеханическая передача транспортного средства | 2019 |
|
RU2716378C1 |
| Гидродинамическая передача | 1980 |
|
SU941760A1 |
| ГИДРОТРАНСФОРМАТОР | 1993 |
|
RU2065104C1 |
| ГИДРОТРАНСФОРМАТОР-ГИДРОЗАМЕДЛИТЕЛЬ | 2001 |
|
RU2227233C2 |
| Гидромеханическая передача для транспортного средства | 1971 |
|
SU495219A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ГИДРОАГРЕГАТОВ ПЕРЕДАЧ | 2021 |
|
RU2765817C1 |
| ГИДРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2188352C2 |
Изобретение относится к области машиностроения и может быть использовано в грузоподъемных механизмах. Лебедка содержит систему управления, приводной электромотор, соединённый с редуктором, барабаном и тормозом. Между электромотором и редуктором установлен турботрансформатор, размещенный в заполненном воздухом корпусе. Корпус содержит тороидальный формирователь потока, насосное колесо с прямыми лопатками и турбинное колесо с прямыми лопатками, реактор. Насосное колесо соединено с выходным валом электромотора. Турбинное - с входным валом редуктора. Реактор расположен между турбинным и насосными колесами и состоит из поворотных прямых лопаток, установленных на осях, закрепленных на тороидальном формирователе и через шестерни соединенных с зубчатым колесом, расположенным в корпусе. На корпусе установлен сервопривод. Одна из осей поворотных лопаток жестко соединена с сервоприводом. Система управления включает процессор, соединенный с сервоприводом, датчиком угловой скорости барабана, переключателем и тормозом, а также с электронным регулятором скорости. Регулятор скорости соединён с мотором через переключатель. Барабан снабжен датчиком угловой скорости. Достигается улучшение эксплуатационных параметров и снижение массы устройства. 3 з.п. ф-лы, 2 ил.
1. Лебедка, содержащая систему управления, приводной электромотор, соединённый с редуктором, барабаном и тормозом, отличающаяся тем, что между электромотором и редуктором установлен турботрансформатор, размещенный в заполненном воздухом корпусе, содержащем тороидальный формирователь потока, насосное колесо с прямыми лопатками, соединенное с выходным валом электромотора, и турбинное колесо с прямыми лопатками, соединенное с входным валом редуктора, а также расположенный между турбинным и насосными колесами реактор, состоящий из поворотных прямых лопаток, установленных на осях, закрепленных на тороидальном формирователе и через шестерни соединенных с зубчатым колесом, расположенным в корпусе, при этом на корпусе установлен сервопривод, с которым жестко соединена одна из осей поворотных лопаток, а система управления включает процессор, соединенный с сервоприводом, датчиком угловой скорости барабана, переключателем и тормозом, а также с электронным регулятором скорости, соединённым с мотором через переключатель, при этом барабан снабжен датчиком угловой скорости.
2. Лебедка по п.1, отличающаяся тем, что в качестве приводного электромотора установлен высокооборотный бесколлекторный электромотор.
3. Лебедка по п.1, отличающаяся тем, что снабжена пультом дистанционного управления.
4. Лебедка по п.1, отличающаяся тем, что лебедка включает аккумуляторную батарею, через переключающее устройство подключенную к приводному электромотору.
| Транс-сервис | |||
| Судовые вспомогательные механизмы | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| RU 94020996 A, 20.10.1996 | |||
| CN 202558519 U, 28.11.2012 | |||
| CN 105804675 A, 27.07.2016 | |||
| US 0003261591 A1, 19.07.1966. | |||

