Способ автономного управления движением военной гусеничной машины (ВГМ) с автоматизированным выделением границ дорожного полотна и автоматической коррекцией траектории движения ВГМ для удержания дороги, являющейся наряду с колеей и дорожным полотном составной частью транспортной инфраструктуры.
Проблемой, требующей решения, является необходимость автоматического выделения дорожного полотна и последующего удержания траектории движения при управлении движением военной гусеничной машины.
Технический результат - осуществление автоматического выделения дорожного полотна и коррекция траектории движения ВГМ за счет применения видео-данных от размещенных на упомянутой ВГМ камер технического зрения, что повышает живучесть транспортного средства (ТС), эффективность выполнения боевой задачи и снижает загрузку оператора при реализации режимов управления военной гусеничной машиной в режиме робототехнического средства (РТС).
Известен способ управления транспортным средством [1, 2727291], использующий сигнал датчика для определения состояния (движения, траектории, останова) транспортного средства впереди себя и использования данных о движении другого транспортного средства в смежной полосе движения, т.е. получения сведений, необходимых для предоставления величины руления в поперечном направлении, осуществляемым исполнительным устройством. Анализ защищенного патентом [1] технического решения позволяет сделать вывод о частном случае управления движением ТС, а именно: определение траектории впереди идущего ТС, определение факта движения другого ТС по смежной полосе, с опережением первого ТС, для того, чтобы не допустить при поперечном рулении заявленного ТС схождения траекторий при обгоне, исключая так называемое «притягивание» заявленного ТС к обгоняемому. Совершенно очевидно, что способ управления ТС [1] рассчитан на организацию движения ТС по шоссе и неприемлем для ВГМ в реальных походных и тем более боевых условиях.
Известен патент [2, 2695011], защищающий способ обнаружения полос, достаточно близкий к проблеме заявляемого способа автономного управления, а именно: осуществлением накопления сведений о маршруте движения определением характеристических точек будущей полосы движения. При этом схема обнаружения полос (так в источнике [2]) позволяет менять полосу движения в динамике (по времени и характеристическим точкам) и в зависимости от ширины (габаритов) ТС, смены как полосы движения, так и направления движения ТС, аккумулируя сведения о характеристических точках полосы движения в направлении цели, обнаруженной посредством датчика, установленного в ТС. В этом же источнике и затрагивается тема границ полосы движения в связи со сменой полосы движения, коррелирующая с заявляемым техническим решением. Тем не менее, активно используемая тема дорожной разметки, фиксируемой датчиком, императивно диктует алгоритм движения ТС как в полосе движения, так и при изменении границ движения. Для полевых условий малопригодно.
Наиболее близким, по мнению заявителя, аналогом заявляемому «Способу…» выбран патент [3, 2725561], защищающий способ обнаружения полос по характеристическим точкам полосы движения в направлении определения (обнаружения) цели, выполняемый поэтапно на основе неразрывности множества характеристических точек, обнаруженных как в полосе движения, так и при изменении полосы движения ТС. Налицо нестатичное «поведение» ТС, как раз в условиях неполной информации, каковыми являются реальные условия нахождения ТС на марше и на поле боевых действий. Тем не менее, по мнению заявителя, не рассмотрен вариант смены направления движения ТС.
Отличительной особенностью технического решения, предлагаемого заявителем является выделение программно-аппаратным комплексом видеоизображения колеи, получаемого с курсовых камер (одной или нескольких), либо границ дорожного полотна, не имеющего разметки краев дороги, полос движения и других четких ограничивающих элементов, и последующая автоматическая коррекция траектории движения с целью ее удержания в пределах (ближе к центру, либо одному из краев) выделенной колеи, либо дорожного полотна.
Также при работе стереокамер на борту РТС могут анализироваться окружающие местные строения (например, дома), выявленные в автоматическом режиме при обработке видеоизображений со стереокамер, а также с использованием средств активной и пассивной локации и дальнометрирования (типа лазерных сканирующих дальномеров - ЛИДАРов и активных радиорадаров обнаружения препятствий). В этом случае, кроме выделения дорожного полотна, дополнительно используется информация о геометрическом центре проема между строениями, при этом траектория движения РТС также автоматически корректируется системой управления движением РТС для удержания траектории движения между упомянутых строений (в частности, домов) выдачей соответствующих команд на исполнительные механизмы, отвечающие за повороты упомянутого образца и изменение скорости движения.
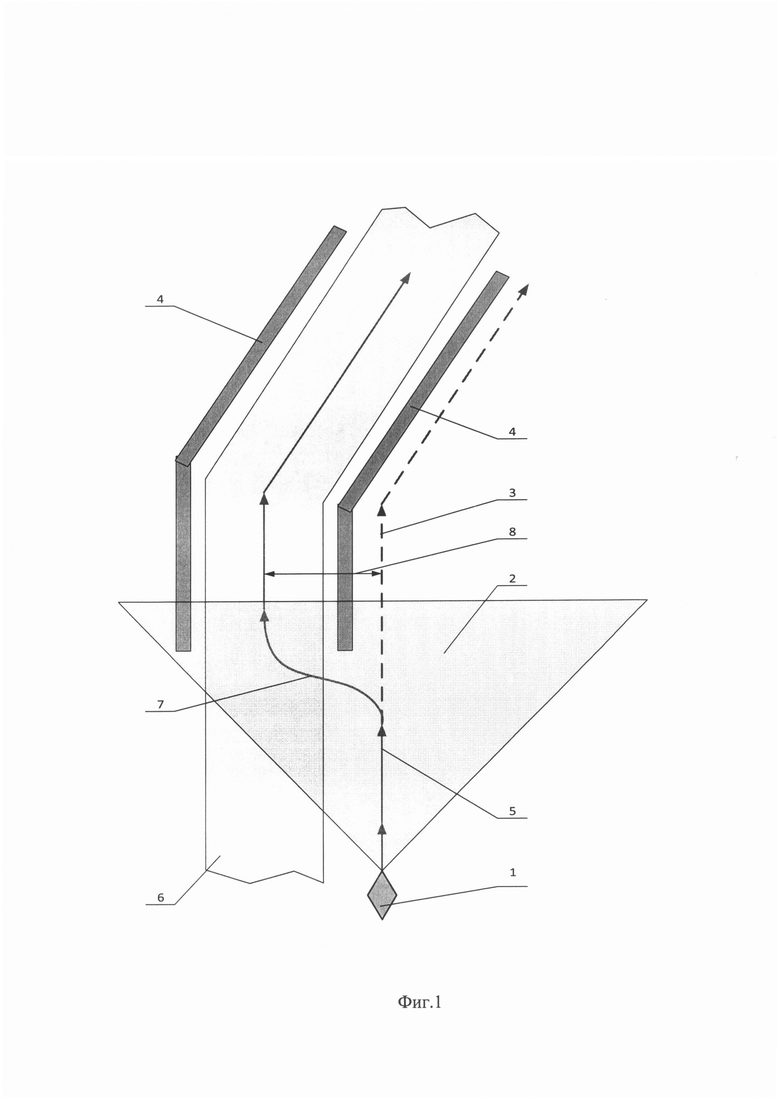
Фиг. 1 является поясняющей иллюстрацией к осуществлению «Способа автономного управления движением ВГМ…». Цифрами на фиг.1 обозначено:
1 - робототехническое средство (РТС) - образец военной гусеничной машины, в аппаратуре которой реализуется способ автономного управления движением, изложенный в настоящей заявке;
2 - зона видения камер технического зрения - сектор, соответствующий наблюдаемому через курсовые камеры технического зрения пространства (спроецированный в плоскости поверхности дорожного полотна);
3 - маршрут без коррекции - маршрут, которому бы соответствовала траектория движения РТС при отсутствии автоматической коррекции траектории;
4 - строения, расположенные по краям дороги (местные строения, которые могут ограничивать дорожное полотно по краям);
5 - исходный спланированный маршрут - маршрут, проложенный оператором вдоль дороги (желаемое направление движения), в себе содержит некоторую погрешность, связанную с человеческим фактором, погрешностями привязки карты местности и работы навигационной системы образца;
6 - дорога, являющаяся наряду с колеей и дорожным полотном составной частью транспортной инфраструктуры - участок местности, предназначенный для движения транспортных средств, выделяемый визуально;
7 - скорректированный маршрут - маршрут, синтезированный на борту РТС в автоматическом режиме и обеспечивающий движение РТС по выделенной дороге (проему между строениями, колее и т.д.);
8 - допустимая зона автономного принятия решения алгоритмом коррекции о следовании по выделенной дороге. Размер зоны может меняться в зависимости от предустановленных настроек, а также от скорости движения изделия и других факторов (наличии и отсутствию внешних помех: строений, посадок, местных неровностей рельефа, др.).
Предлагаемый заявителем «Способ…» содержит программно-аппаратный комплекс, состоящий из вычислительных блоков и блоков управления, а также программные алгоритмы, обеспечивающие автоматическое выделение дороги (колеи) с последующей реализацией коррекции траектории движения для удержания траектории движения РТС в пределах выделенного дорожного полотна (колеи), по которому проложен маршрут, что позволит снизить загрузку оператора, контролирующего процесс движения в дистанционном режиме, либо водителя, непосредственно находящегося в РТС - при реализации концепции полуавтономного движения, аналога адаптивного круиз-контроля - и повысить эффективность выполнения боевых задач РТС в реальных условиях.
Заявляемый «Способ автономного управления движением ВГМ по местности с автоматической привязкой траектории к имеющейся распознанной транспортной инфраструктуре» осуществляют следующим образом.
Осуществление изобретения. Автономное управление.
При отсутствии средств автоматического распознавании дороги для начала движения ВГМ (РТС) 1 оператор, управляющий ТС на расстоянии, владеет ограниченным выбором маршрута 3, не всегда оптимальным с точки зрения расстояния, безопасности, уязвимости и др. Посредством оптических приборов, информации на мониторе, других сведений оператор осуществляет изучение местности, обозначенную на фиг.1 как зона 2 наблюдаемого пространства для создания маршрута 5, траектории движения ТС, используя при этом видео-данные камер технического зрения, установленных как на ТС, так и на др. объектах. Программно-аппаратный комплекс, включающий в себя вычислительные блоки и блоки управления, осуществляют сбор, обработку информации, автоматически определяют выделение дороги 6, траектории движения 7 ТС, используя в качестве ориентиров привязки к местности строения 4, лесные массивы, кустарники, рельеф местности и др. Предлагаемое в качестве изобретения техническое решение «Способ автономного управления движением ВГМ…» заключается в автоматической привязке к выделенной траектории с накоплением в динамике ориентиров, помех, ровных участков для прокладывания оптимального маршрута движения. Накопленные блоком управления данные служат основанием для обеспечения допустимой зоны коррекции 8, безопасного движения, маневров, останова, организации огневой точки.
При необходимости, описанное выше техническое решение позволяет упростить задачу управления движением со стороны водителя в экипажном режиме применения РТС. В этом случае водитель может вмешиваться в процесс автономного управления движением РТС и корректировать сформированную автономно траекторию движения (например, за счет отклонения штатного органа управления, но при этом не перехватывая управление полностью, а внося необходимую коррекцию).
Таким образом, решена техническая задача по автоматическому выделению по видеоданным от камер технического зрения, размещенным на ВГМ, дорожного полотна (колеи) и последующей реализации удержания траектории движения РТС в пределах выделенного дорожного полотна (колеи), по которому проложен маршрут, что позволяет реализовать возможности автоматической (автономной) коррекции траектории движения РТС и снижает загрузку оператора при реализации режимов управления движением РТС по имеющейся дорожной сети, при которых оператор не осуществляет постоянного прямого управления поворотами РТС, а при необходимости вмешивается в процесс управления от случая к случаю при необходимости коррекции, что в целом повышает эффективность выполнения боевых задач упомянутого РТС в реальных условиях.
Литература:
1. Акамацу Ю. и др. (JP). Способ управления транспортным средством и устройство управления транспортного средства. Патент РФ 2727291. Приоритет от 14.04.2017 г. МПК B60W 30/12, B62D 6/04, B62D 15/00. Патентообладатель Ниссан Мотор Ко., ЛТД (JP). Патент действует.
2. Цутия Т., Сан Я. (JP). Способ (варианты) и устройство обнаружения полос движения. Патент РФ 2695011. Приоритет от 24.03.2016 г. МПК B60W 30/12, G06K 9/46. Патентообладатель Ниссан Мотор Ко., ЛТД (JP). Патент действует.
3. Цутия Т., Сан Я. (JP). Способ и устройство обнаружения полос движения. Патент РФ 2725561. Приоритет от 24.03.2016 г. МПК B60W 30/12, G06K 9/46. Патентообладатель Ниссан Мотор Ко., ЛТД (JP). Патент действует.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления движением беспилотных транспортных средств (БТС) в колонне и/или отдельных БТС и мониторинга интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог | 2019 |
|
RU2725569C1 |
| Способ дистанционного управления автономным движением колонн и/или беспилотных транспортных средств (БТС) интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог | 2018 |
|
RU2712715C1 |
| Способ управления движением беспилотных автономных транспортных средств (БАТС) и колонн БАТС интеллектуальной транспортной инфраструктурой (ИТИ) автомобильной дороги | 2018 |
|
RU2712487C1 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| Робототехнический комплекс для ведения разведки и огневой поддержки | 2017 |
|
RU2686983C2 |
| Способ создания трека пути движения для автономного движения подвижного объекта и способ осуществления автономного движения подвижного объекта по треку пути движения | 2018 |
|
RU2691679C1 |
| Интегрированная система безопасности на основе автоматизированных функциональных систем и подсистем | 2022 |
|
RU2794559C1 |
| Способ управления работой системы активной безопасности транспортных средств | 2018 |
|
RU2704357C1 |
| Способ картографирования местности для автономных транспортных средств | 2021 |
|
RU2784310C1 |
| УСТРОЙСТВО И СИСТЕМА КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2019 |
|
RU2736930C1 |
Изобретение относится к способу автономного управления движением военной гусеничной машины по местности с автоматической привязкой траектории к имеющейся распознанной транспортной инфраструктуре. Движение, в частности, робототехнического средства осуществляется посредством программных алгоритмов программно-аппаратного комплекса. Программно-аппаратный комплекс состоит из вычислительных блоков, блоков управления и камер технического зрения. Способ характеризуется автоматическим выделением и удержанием дороги как составной части транспортной инфраструктуры; последующей коррекцией траектории движения робототехнического средства, в пределах выделенного дорожного полотна, также составной части транспортной инфраструктуры. Автоматическое управление и последующая коррекция траектории движения осуществляется на основании видеоданных камер технического зрения, размещенных на военной гусеничной машине. Достигается повышение живучести транспортного средства. 2 з.п. ф-лы, 1 ил.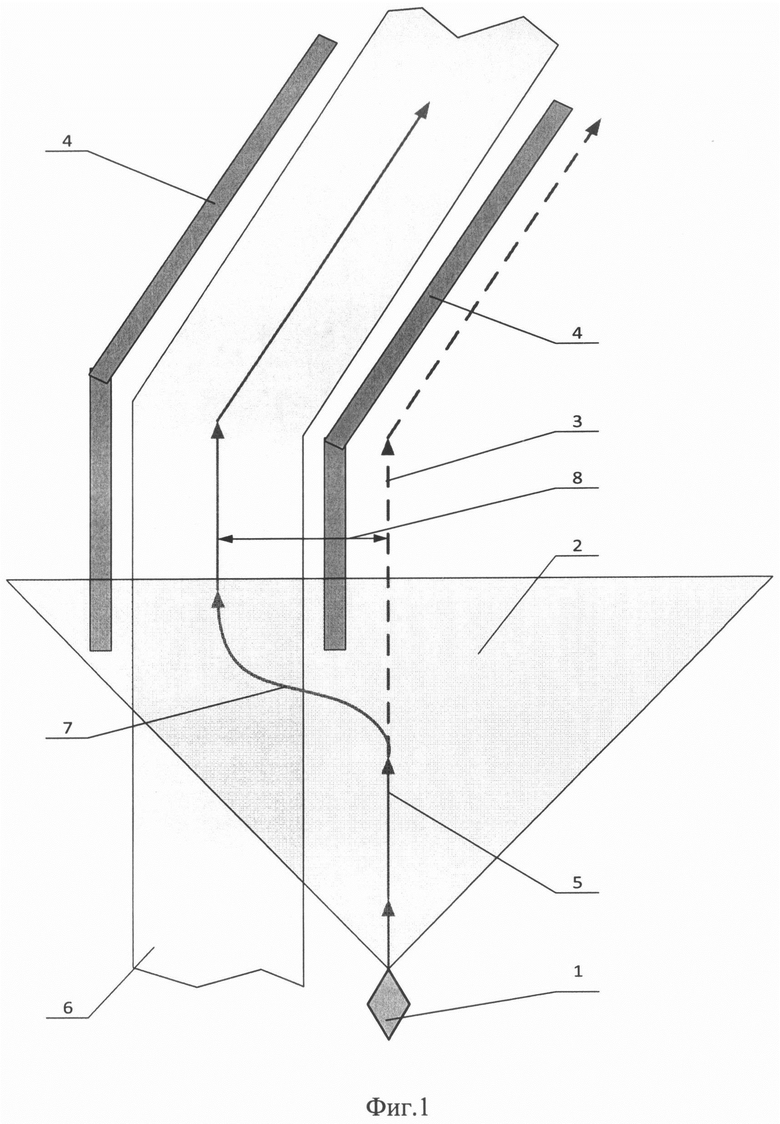
1. Способ автономного управления движением военной гусеничной машины (ВГМ) по местности с автоматической привязкой траектории к имеющейся распознанной транспортной инфраструктуре, в частности, движения робототехнического средства (РТС), осуществляемый программными алгоритмами программно-аппаратного комплекса, состоящего из вычислительных блоков и блоков управления, характеризующийся автоматическим выделением и удержанием дороги как составной части транспортной инфраструктуры, последующей коррекцией траектории движения робототехнического средства в пределах выделенного дорожного полотна, также составной части транспортной инфраструктуры, на основании видеоданных камер технического зрения, размещенных на ВГМ, позволяющий снизить загрузку оператора.
2. Способ по п. 1, отличающийся тем, что коррекцию осуществляют не за счет прямого управления маневрами РТС, а за счет уже сформированной траектории, удерживаемой в пределах выделенного дорожного полотна с автоматической коррекцией по видеоданным камер технического зрения, расположенных на ВГМ.
3. Способ по п. 1, отличающийся тем, что удержание траектории движения контролирует водитель РТС, внося коррекцию в сформированную автоматически траекторию движения за счет смещения ближайших курсовых точек ортогонально относительно направления движения, в частности вправо или влево.
| US 2020250439 A1, 06.08.2020 | |||
| Автономный мобильный многофункциональный роботизированный комплекс | 2017 |
|
RU2722301C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
| Автономный мобильный робототехнический комплекс | 2016 |
|
RU2632342C1 |

