Область техники, к которой относится изобретение
Настоящее изобретение относится к области интеллектуальных транспортных систем, и, более конкретно, к устройству, системе и способу контроля движения транспортных средств.
Уровень техники
Согласно статистике, самый высокий процент по соотношению количества ДТП и тяжести последствий приходится на такие нарушения, как:
- Выезд на полосу встречного движения.
- Несоответствие скорости транспортного средства (ТС) конкретным условиям движения.
- Нарушение правил расположения ТС на проезжей части.
В связи с этим в мире активно внедряются и развиваются программы и системы повышения безопасности дорожного движения. Как правило, они направлены на борьбу с каким-то определенным видом нарушения. Одной из главных мер по снижению количества ДТП является контроль соблюдения скорости, так как прочие нарушения сложно выявлять в автоматическом режиме из-за невозможности полного охвата автодорог видеокамерами.
Среди известных систем популярны, например, устройства измерения моментальной скорости. Такие системы действительно дают свои результаты, уменьшая количество происшествий, поскольку водители соблюдают правила дорожного движения в поле действия системы – фактически, в пределах нескольких метров или десятков метров около нее. Системы определения средней скорости (такие как RU 2606521 C1) стали следующим шагом в попытке обеспечить контроль соблюдения ПДД на несколько более протяженном участке дороги по сравнению с системами определения моментальной скорости. Однако и они, как и другие используемые в настоящее время системы контроля за соблюдением правил дорожного движения, преимущественно работают в стационарном режиме (размещаются на опорах у дорог) или квазистационарном (передвижном) режиме (переносятся с места на место операторами). Обычно в этих системах ГЛОНАСС/GPS используют только для высокоточного определения времени.
Соответственно, современные системы работают лишь в определенных узких локациях, и это не гарантирует безопасную обстановку везде, так как те же самые водители могут потенциально прекратить соблюдать скоростной режим за пределами видимости таких систем, что может вызвать возникновение ДТП в зонах, не охваченных подобными системами.
Более того, такие серьезные правонарушения, как выезд на встречную полосу или агрессивное вождение, вообще в большинстве своем остаются без контроля, так как, несмотря на то, что возможность контроля выезда на встречную полосу и рядности движения в некоторых комплексах (таких как многоцелевой фоторадарный комплекс «Кордон», аппаратно-программный комплекс автоматического распознавания государственных регистрационных знаков транспортных средств и фиксации нарушений ПДД «АвтоУраган-ВСМ», многоцелевые комплексы автоматической фотофиксации нарушений правил дорожного движения «СКАТ») заявлена, фактически их применение крайне ограничено радиусом действия (несколько десятков метров), и к тому же, для выявления таких нарушений часто сложно собрать доказательную базу: недостаточно фото с одной камеры, важно показать нарушение с разных ракурсов.
Решением могли бы стать мобильные системы фото- и видеофиксации, однако известные мобильные комплексы (такие как RU 126174 U1), контролируют, как правило, только правила стоянки автомобилей. При этом они требуют участия инспекторов дорожного движения, так как данные комплексы способны измерить только собственное местоположение, а не положение фиксируемых автомобилей.
Наиболее близким решением к предложенному решению является заявленная в патенте RU 110856 U1 система фиксации нарушений скоростного режима транспортным средством, содержащая по меньшей мере два регистратора, каждый из которых включает в себя по меньшей мере один компьютер и видеокамеру и выполнен с возможностью захвата изображения транспортного средства, отличающаяся тем, что каждый регистратор оснащен приемником глобальной навигационной спутниковой системы для связи с глобальной навигационной спутниковой системой и выполнен с возможностью определения своих географических координат и синхронизации времени, причем дополнительно компьютер через межсетевой экран с криптопровайдером связан с адаптером и модемом, который через систему связи оператора посредством сети передачи данных соединен с вычислительным центром, выполненным с возможностью вычисления скорости транспортного средства по данным, получаемым с по меньшей мере двух регистраторов, причем криптопровайдер установлен с возможностью защиты регистратором обрабатываемых данных электронно-цифровой подписью.
Данная система может быть мобильной, однако она не может фиксировать нарушения, отличные от превышения средней скорости, является недостаточно точной, требуя минимального расстояния между регистраторами в 500 м, а также не может применяться при отклонениях формы дороги от прямой линии.
Соответственно, несмотря на развитие систем повышения безопасности дорожного движения, пока не существует такой системы контроля, которая распространяла бы свое действие повсеместно.
Сущность изобретения
С целью устранения по меньшей мере некоторых из вышеупомянутых недостатков предшествующего уровня техники, настоящее изобретение направлено на расширение границ эксплуатации систем повышения безопасности дорожного движения, с тем чтобы приборы фиксации нарушений ПДД можно было применять в тех местах, где ранее внедрение таких приборов было технически невозможно.
Согласно первому аспекту настоящего изобретения, предложено устройство для контроля движения транспортных средств, установленное на мобильный объект, расположенный на автодороге или вблизи нее, и содержащее:
блок навигации, выполненный с возможностью определения своих географических координат и синхронизации времени на основе данных, принимаемых от глобальной навигационной спутниковой системы, с учетом поправок, получаемых от базовой станции;
блок фиксации, содержащий фотокамеру и/или видеокамеру и выполненный с возможностью фиксации изображения фиксируемого транспортного средства, находящегося в поле обзора блока фиксации;
блок распознавания, выполненный с возможностью распознавания государственного регистрационного знака фиксируемого транспортного средства на основе зафиксированного изображения;
блок определения времени фиксации, выполненный с возможностью определения момента времени, в который было зафиксировано изображение фиксируемого транспортного средства, на основе данных о времени от блока навигации;
блок хранения данных, выполненный с возможностью хранения данных, полученных от блока навигации, блока фиксации, блока распознавания, блока определения времени фиксации и вычислительного модуля; и
вычислительный модуль, содержащий:
- блок хранения карты, выполненный с возможностью хранения карты с профилем местности, предварительно построенной с применением высокоточного измерения координат в движении с учетом поправок, получаемых от базовой станции; и
- блок определения местоположения, выполненный с возможностью определения местоположения упомянутого мобильного объекта на автодороге посредством определения проекции географических координат, определенных блоком навигации в момент фиксации изображения фиксируемого транспортного средства, на профиле местности, сохраненном в блоке хранения карты.
В одном из вариантов осуществления устройство дополнительно содержит блок формирования метаданных, выполненный с возможностью формирования метаданных по каждому зафиксированному транспортному средству на основе данных, полученных от блока навигации, блока фиксации, блока распознавания, блока определения времени фиксации и вычислительного модуля; и
передатчик, выполненный с возможностью передачи сформированных метаданных в центр обработки данных и/или на другое устройство для контроля движения транспортных средств.
В одном из вариантов осуществления устройство дополнительно содержит приемник, выполненный с возможностью приема метаданных от центра обработки данных и/или от другого устройства для контроля движения транспортных средств.
В одном из вариантов осуществления карта дополнительно содержит данные о зонах, содержащих ограничения касательно расположения или движения на них транспортных средств;
причем устройство дополнительно содержит:
блок выявления нарушения правил расположения транспортных средств, выполненный с возможностью определения, что по меньшей мере одно определенное местоположение фиксируемого транспортного средства по меньшей мере в один момент времени фиксации не соответствует зоне на карте, в которой ему разрешено располагаться.
В одном из вариантов осуществления устройство дополнительно содержит блок определения средней скорости, выполненный с возможностью:
определения, что в разные моменты времени зафиксировано одно и то же фиксируемое транспортное средство,
определения разницы во времени между упомянутыми моментами фиксации для фиксируемого транспортного средства,
определения расстояния между местоположениями мобильного объекта на автодороге в упомянутые моменты фиксации,
определения средней скорости фиксируемого транспортного средства на участке между упомянутыми моментами фиксации на основе упомянутых определенных разницы во времени и расстояния.
В одном из вариантов осуществления определение средней скорости выполняется только тогда, когда упомянутая определенная разница во времени больше или равна пороговой разнице или упомянутое определенное расстояние больше или равно пороговому расстоянию.
В одном из вариантов осуществления в разные моменты времени одно и то же фиксируемое транспортное средство зафиксировано разными устройствами для контроля движения транспортных средств.
В одном из вариантов осуществления в разные моменты времени одно и то же фиксируемое транспортное средство зафиксировано данным устройством.
В одном из вариантов осуществления блок определения местоположения дополнительно выполнен с возможностью определения местоположения фиксируемого транспортного средства на основе карты, полученных изображений и местоположения мобильного объекта на автодороге.
В одном из вариантов осуществления блок определения местоположения дополнительно выполнен с возможностью определения усредненного местоположения фиксируемого транспортного средства на основе нескольких фиксаций транспортного средства, полученных за короткий промежуток времени или расстояния.
В одном из вариантов осуществления определение местоположения фиксируемого транспортного средства выполняется посредством определения проекции на профиле местности географических координат фиксируемого транспортного средства, полученных посредством определения его положения относительно географических координат мобильного объекта на основе полученных изображений.
В одном из вариантов осуществления положение фиксируемого транспортного средства относительно мобильного объекта определяется на основе расстояния и угла относительно мобильного объекта до фиксируемого транспортного средства, определенных на основе полученных изображений.
В одном из вариантов осуществления мобильным объектом является контролирующее транспортное средство, беспилотный аппарат, человек или животное.
В одном из вариантов осуществления поправки, получаемые от базовой станции, реализованы согласно системе дифференциальной коррекции.
В одном из вариантов осуществления упомянутая проекция определяется по кратчайшему расстоянию между упомянутыми определенными географическими координатами и координатами профиля местности.
Согласно второму аспекту настоящего изобретения, предложена система для контроля движения транспортных средств, содержащая:
- регистратор транспортных средств (РТС), установленный на контролирующее транспортное средство, расположенное на автодороге или вблизи нее, и содержащий:
блок навигации, выполненный с возможностью определения своих географических координат и синхронизации времени на основе данных, принимаемых от глобальной навигационной спутниковой системы, с учетом поправок, получаемых от базовой станции;
блок фиксации, содержащий фотокамеру и/или видеокамеру и выполненный с возможностью фиксации изображения фиксируемого транспортного средства, находящегося в поле обзора блока фиксации;
блок распознавания, выполненный с возможностью распознавания государственного регистрационного знака фиксируемого транспортного средства на основе зафиксированного изображения;
блок определения времени фиксации, выполненный с возможностью определения момента времени, в который было зафиксировано изображение фиксируемого транспортного средства, на основе данных о времени от блока навигации;
блок хранения данных, выполненный с возможностью хранения данных, полученных от блока навигации, блока фиксации, блока распознавания и блока определения времени фиксации;
блок формирования метаданных, выполненный с возможностью формирования метаданных по каждому зафиксированному транспортному средству на основе данных, полученных от блока навигации, блока фиксации, блока распознавания и блока определения времени фиксации;
передатчик, выполненный с возможностью передачи сформированных метаданных в центр обработки данных, на вычислительный модуль и/или на другой РТС;
приемник, выполненный с возможностью приема метаданных от центра обработки данных, от вычислительного модуля и/или от другого РТС;
- вычислительный модуль, содержащий:
блок хранения карты, выполненный с возможностью хранения карты с профилем местности, предварительно построенной с применением высокоточного измерения координат в движении с учетом поправок, получаемых от базовой станции; и
блок определения местоположения, выполненный с возможностью определения местоположения упомянутого мобильного объекта на автодороге посредством определения проекции географических координат, определенных блоком навигации в момент фиксации изображения фиксируемого транспортного средства, на профиле местности, сохраненном в блоке хранения карты.
В одном из вариантов осуществления система дополнительно содержит центр обработки данных, выполненный с возможностью приема, обработки, передачи и хранения метаданных о фиксации транспортных средств и выявления нарушений транспортными средствами правил дорожного движения на основе упомянутых метаданных.
В одном из вариантов осуществления вычислительный модуль расположен в центре обработки данных, непосредственно у дороги или внутри РТС.
Технический результат
Настоящее изобретение обеспечивает улучшенный контроль любых нарушений и дорожной обстановки в целом. Система позволяет увеличить безопасность на дорогах за счет повышения вероятности выявления нарушений и связанным с этим изменением психологии водителей, сделав их активными участниками безопасного движения. При этом обеспечивается:
- возможность работы в мобильном режиме (в движении) за счет повышения точности позиционирования путем применения сочетания поправок от базовой станции и проецирования измеренных координат на предварительно построенную карту профиля местности;
- измерение скорости движения автомобилей без излучения («невидимость» для радар-детекторов);
- фиксация недоступных ранее для контроля типов нарушений ПДД (выезд на встречную полосу, движение по полосе для общественного транспорта или обочине, нарушение правил расположения ТС, опасное вождение и др.),
- высокоточное позиционирование фиксируемых транспортных средств, а не только самого устройства.
Эти и другие преимущества настоящего изобретения станут ясны при прочтении нижеследующего подробного описания со ссылкой на сопроводительные чертежи.
Краткое описание чертежей
На Фиг. 1 показан принцип работы традиционной системы для контроля движения транспортных средств.
На Фиг. 2 показан пример перемещения разных мобильных регистраторов вдоль автодороги.
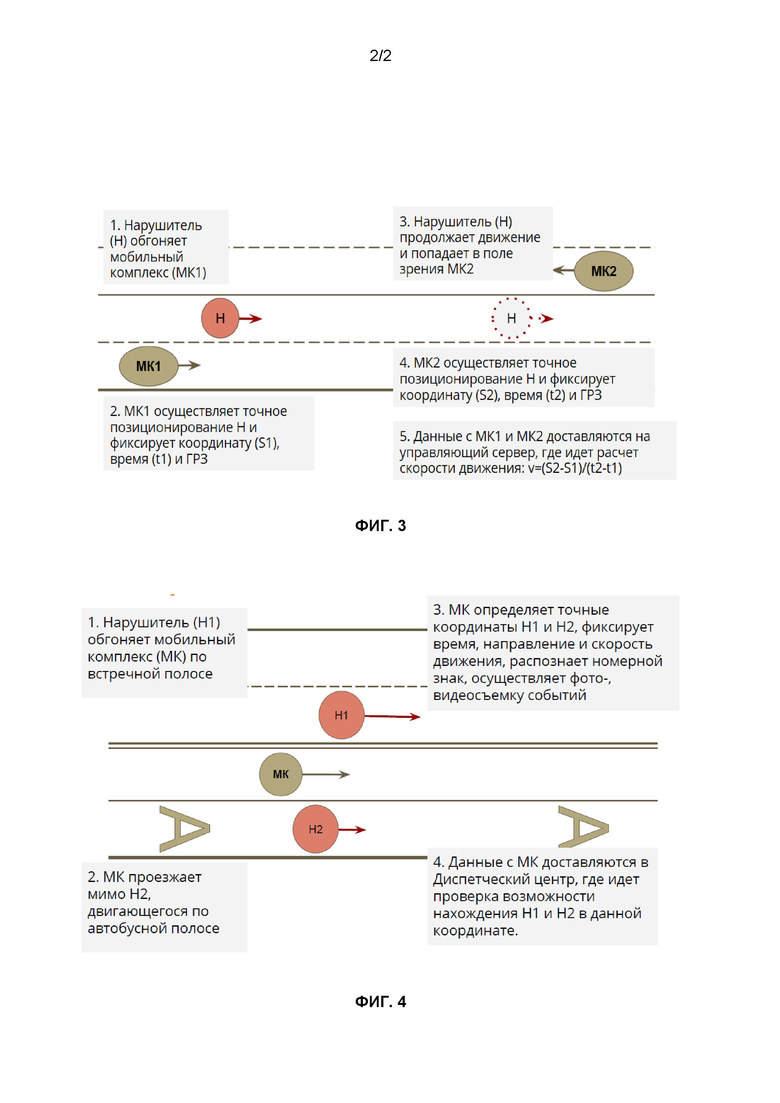
На Фиг. 3 показан пример работы комплекса мобильных регистраторов для случая определения средней скорости движения транспортного средства.
На Фиг. 4 показан пример работы комплекса мобильных регистраторов для случая выявления нарушения правил расположения.
Следует понимать, что фигуры могут быть представлены схематично и не в масштабе и предназначены, главным образом, для улучшения понимания настоящего изобретения.
Подробное описание
Обзор традиционной фиксированной системы для контроля движения транспортных средств
На Фиг. 1 показан принцип работы традиционной системы для контроля движения транспортных средств. В двух удаленных друг от друга точках на прямом участке дороги устанавливается комплекс фиксированных регистраторов. Каждый регистратор измеряет свое местоположение, находит фиксации одного и того же государственного регистрационного знака и измеряет время, затраченное на проезд, как разница между моментами фиксации. Далее измеряет скорость путем деления расстояния на время.
Более подробно, система включает в себя два устройства регистрации ТС (транспортных средств). Устройства регистрации ТС устанавливаются на въезде и выезде из зоны контроля средней скорости V на участке дороги, причем протяженность S зоны контроля заранее определена. Каждое из устройств регистрации ТС содержит средство фотофиксации и/или видеофиксации ТС для получения фотоизображения ТС в высоком разрешении. Каждое из устройств распознает область на фотоизображении, содержащую представление номерного знака ТС, и преобразует полученное графическое представление номерного знака ТС в буквенно-цифровой вид. Первоначальное фотоизображение, содержащее изображение ТС, сохраняется на каждом из средств регистрации ТС, на котором оно было сделано. Средства регистрации ТС связаны со спутниками глобальной навигационной спутниковой системы (ГНС), например, GPS, ГЛОНАСС, что позволяет определить время фиксации ТС в каждой зоне соответствующего устройства регистрации ТС. Каждая из зон представляет собой область, видимую устройством регистрации ТС, и каждая из упомянутых областей разделена на некоторое количество зон.
Полученную информацию от средств регистрации ТС передают с помощью каналов передачи данных, например с помощью беспроводных сетей GPRS, 3G, 4G, LTE, Wi-Fi, WiMax, на сервер, с помощью которого выполняется вычисление пройденного пути S.
На сервере определяется время ДT проезда контролируемого участка дороги ТС как разность между временем выезда t2 из зоны и временем въезда t1 в зону контролируемого участка дороги, с помощью чего затем определяют среднюю скорость V движения ТС на контролируемом участке дороги длиной S по формуле V=S/(t2-t1).
Такая система является в целом эффективной и точной, однако она работает, как было показано выше, лишь в небольшой ограниченной области, тогда как остальная дорога не охвачена контролем дорожного движения, и водители ТС, зная об отсутствии контроля, потенциально могут нарушить правила, что ведет к снижению безопасности дорожного движения и к повышению аварийности.
В то же время, необходимо понимать, что система согласно настоящему изобретению может содержать те или иные из вышеперечисленных элементов традиционной системы и выполнять те или иные их функции, если это применимо и не противоречит предложенным подходам. Например, в настоящем изобретении могут применяться аналогичные средства фиксации и передачи данных, принципы измерения скорости и т.д.
Система для контроля движения транспортных средств согласно настоящему изобретению
В настоящем изобретении предлагается выработка нового подхода к контролю соблюдения ПДД (правил дорожного движения) за счет перехода от контроля ПДД дорогостоящими стационарными комплексами к контролю компактными передвижными приборами, которые в перспективе могут быть встроены во все автомобили, то есть к внедрению средств контроля за соблюдением правил дорожного движения и мониторинга дорожной обстановки непосредственно в транспортный поток. Это достигается за счет включения инструментов точного геопозиционирования окружающих объектов в движении и объединения данных с этих устройств в единую вычислительную сеть для получения более полной информации по каждому дорожному событию и для возможности аналитической обработки информации о транспортных потоках статистическими и методами машинного обучения.
В настоящем изобретении регистратор обеспечивает позиционирование с сантиметровой точностью, что обеспечивает возможность выявлять нарушения с привязкой к карте. А объединение приборов в едином информационном пространстве позволит выявлять нарушения, которые требуют фиксации нарушителя с разных ракурсов на протяженном участке автодороги, например, опасное вождение.
В частности, предлагается система контроля соблюдения скорости на участке автодороги, содержащая регистратор транспортных средств (РТС) и вычислительный модуль (ВМ), где РТС в движении фиксирует государственные регистрационные знаки, время фиксации и координаты транспортных средств, а ВМ получает данные с РТС, по разнице координат фиксаций одного и того же транспортного средства измеряет пройденный путь, по разности времени фиксации - затраченное на преодолении пути время и скорость движения.
В одном из вариантов осуществления ВМ содержит карту с профилем автодорог, построенную с сантиметровой точностью с помощью технологии Real Time Kinematic.
В одном из вариантов осуществления ВМ может располагаться как в удаленном Дата-центре, так и непосредственно у дороги, в том числе в составе РТС.
Более подробно, система для контроля движения транспортных средств согласно настоящему изобретению содержит три компонента: мобильный регистратор транспортных средств (РТС), вычислительный модуль (ВМ) и удаленный центр обработки данных.
Регистратор транспортных средств (РТС), будучи компактным прибором, установлен на мобильный объект, такой как транспортное средство (в настоящем документе оно может также называться контролирующим транспортным средством или вторым транспортным средством в целях его различения от других транспортных средств, упоминаемых здесь). Например, он может быть установлен в патрульном автомобиле, такси, автобусе, ином общественном транспорте, в транспорте специального назначения, на мотоцикле, велосипеде, сегвее или любом другом подходящем объекте, который может располагаться и двигаться на автодороге или вблизи нее. Кроме того, в одном из вариантов осуществления в качестве мобильного объекта может также рассматриваться беспилотный аппарат, как летательный, так и перемещающийся по земле, человек, переносящий такой РТС, или животное, такое как патрульная лошадь или собака. То есть предлагаемый РТС является не стационарным и не квазистационарным, а по-настоящему мобильным прибором.
РТС включает в себя несколько блоков: блок навигации, блок фиксации, блок распознавания, блок определения времени фиксации и память (блок хранения данных), а также опционально блок формирования метаданных, передатчик и приемник.
Блок навигации на основе данных, принимаемых от глобальной навигационной спутниковой системы, такой как GPS, ГЛОНАСС, BeiDou, Galileo, QZSS, определяет свои географические координаты и синхронизирует время. С целью увеличения точности позиционирования блок навигации также получает поправки от базовой станции. Поправки могут быть реализованы, например, согласно системе дифференциальной коррекции, такой как технология Real Time Kinematic (кинематика реального времени). Это позволяет достичь точности позиционирования 3-5 см и лучше при точности синхронизации 5 мс и лучше.
Блок фиксации содержит фотокамеру и/или видеокамеру, которая в процессе движения мобильного объекта (например, автобуса, в кабине которого установлено РТС) осуществляет, соответственно, периодическую или непрерывную съемку окружающего пространства, попадающего в поле обзора камеры. Следует понимать, что мобильный объект не обязан двигаться непрерывно, поскольку он может останавливаться, например, на светофорах, на остановках или в дорожных заторах, но съемка при этом все равно может вестись. Когда в поле обзора камеры попадает проезжающее мимо транспортное средство или стоящее транспортное средство, мимо которого проезжает мобильный объект с РТС, происходит фиксация изображения этого транспортного средства (в настоящем документе оно может также называться фиксируемым транспортным средством или первым транспортным средством в целях его различения от других транспортных средств, упоминаемых здесь).
Исходя из зафиксированного изображения фиксируемого транспортного средства, блок распознавания по возможности распознает его государственный регистрационный знак (ГРЗ). При необходимости блок распознавания может также выполнять функции распознавания типа, марки и/или модели фиксируемого транспортного средства на основе зафиксированного изображения.
В то же время блок определения времени фиксации определяет момент времени, в который было зафиксировано изображение фиксируемого транспортного средства, на основе данных о точном времени от блока навигации.
На основе данных, полученных от блока навигации, блока фиксации, блока распознавания и блока определения времени фиксации блок формирования метаданных формирует метаданные по каждому зафиксированному транспортному средству. Это позволяет снизить требования к объему памяти и к пропускной способности канала связи.
Данные, полученные от блока навигации, блока фиксации, блока распознавания и блока определения времени фиксации сохраняются в памяти РТС (блоке хранения данных) в неизменном виде или в виде метаданных.
Метаданные могут быть переданы с помощью передатчика данного РТС в центр обработки данных, на вычислительный модуль и/или на другой РТС с помощью стандартных (GPRS, 3G, 4G, WiFi, Bluetooth, RFID, Zigbee и т.д.) или проприетарных протоколов передачи данных.
Приемник может принимать другие метаданные от центра обработки данных, от вычислительного модуля и/или от другого РТС.
Вычислительный модуль (ВМ), который представляет собой компьютерное средство, содержит память (блок хранения карты) и блок определения местоположения.
В памяти ВМ хранятся карты с профилем автодорог, предварительно построенные с применением высокоточного измерения координат в движении с учетом поправок, получаемых от базовой станции.
Пользуясь профилем автодороги, сохраненным в памяти, блок определения местоположения строит проекцию географических координат, которые были определены блоком навигации РТС в момент фиксации изображения фиксируемого транспортного средства, на этом профиле. В частности, проекция строится по нормали, то есть по кратчайшему расстоянию между определенными координатами РТС и профилем автодороги.
Центр обработки данных снабжен функциями приема, обработки, передачи и хранения метаданных о фиксации транспортных средств и выявления нарушений транспортными средствами правил дорожного движения на основе упомянутых метаданных. Например, центр обработки данных может выявлять нарушение скорости движения или нарушение правил расположения транспортных средств.
На Фиг. 2 показан пример перемещения разных мобильных регистраторов вдоль автодороги. Регистраторы транспортных средств могут работать как в фиксированном, так и в мобильном положении. Оба регистратора размещаются на дороге на определенном расстоянии и измеряют свое местоположение по ГЛОНАСС/GPS. Для каждого регистратора транспортных средств ищется проекция местоположения прибора на профиле автодороги (кратчайшее расстояние между регистратором и профилем автодороги). Следует отметить, что на Фиг. 2 профиль дороги и проекции к нему от РТС показаны не в точности, а только в целях общего понимания того, что определенное местоположение блока навигации РТС может несколько отличаться от его реального местоположения, поэтому ищется кратчайшее расстояние до профиля дороги.
Тем самым, даже если местоположение РТС в пространстве не было достаточно точно определено вследствие того, что мобильный объект движется, его блок навигации не имеет в конкретный момент достаточного количества видимых спутников из-за плотной городской застройки, или вследствие других негативных факторов, таких как плохие метеоусловия, помехи, отражение сигнала и т.д., то вычисление проекции на профиле дороги позволяет сократить ошибку и более точно определить, где именно на дороге находится мобильный объект с РТС. За счет этого появляется возможность не фиксировать РТС в одной точке, а использовать РТС на мобильном объекте, движущемся с относительно высокой скоростью, сопоставимой со скоростью потока транспортных средств на автодороге.
Принцип работы системы и устройств для контроля движения транспортных средств
Далее раскрывается то, как выполняется построение карты профиля автодорог, и пример дальнейшей работы системы контроля движения транспортных средств согласно настоящему изобретению. Так, данная система позволяет выполнить мобильное исполнение за счет следующего:
1. Предварительного построения профиля автодороги за счет применения высокоточного измерения координат в движении:
● прибор для построения профиля автодороги с возможностью получения поправок от базовой станции размещается на транспортном средстве,
● производится объезд автодорог с измерением координат 5-10 раз в секунду с точностью 3-5 см,
● программно соединяются все точки измерения, строится профиль автодороги и сохраняется в памяти и/или передается в центр обработки данных, на РТС, движущиеся по дорогам, и на вычислительные модули, расположенные вдоль дорог.
В одном из вариантов осуществления прибором для построения профиля автодороги может быть сам РТС, то есть он предварительно может проехать по требуемой дороге, если карта её профиля ранее не была сохранена в его памяти или в базе данных центра обработки данных или её требуется обновить, произведя объезд с относительно малой скоростью (в целях увеличения точности), может построить высокоточную карту профиля автодорог и сохранить её у себя в памяти, а затем перейти непосредственно к мобильному контролю движения в рамках карты построенного участка и тех карт, которые у него уже есть в памяти. Соответственно, картографическая база данных может быть построена постепенно в процессе эксплуатации таких РТС, и нет необходимости получать уже готовую карту.
Вычислительный модуль может быть расположен в центре обработки данных, внутри РТС или может быть отдельным устройством, расположенным, например, непосредственно у дороги. Соответственно, РТС может либо вообще не пользоваться картой профиля дорог, поручив соответствующую обработку данных вычислительному модулю, либо может получить на месте от расположенного поблизости вычислительного модуля ранее неизвестную ему карту профиля автодорог. Также РТС может обновлять карту, ранее сохраненную в ВМ.
2. Оба регистратора транспортных средств, передвигаясь, на моменты фиксации одного и того же (фиксируемого) транспортного средства размещаются на дороге на некотором расстоянии друг от друга, измеряют свое местоположение по ГЛОНАСС/GPS.
3. Для каждого регистратора транспортных средств ищется проекция местоположения прибора на профиле автодороги (кратчайшее расстояние между регистратором и профилем автодороги).
4. Измеряется расстояние между обеими проекциями, как сумма расстояний между измеренными координатами профиля автодороги.
5. Для каждого зафиксированного проезда определяется по ГЛОНАСС/GPS время с точностью не менее 5 мс, распознается государственный регистрационный знак.
6. Находятся фиксации одного и того же государственного регистрационного знака на обоих приборах и измеряется время, затраченное на проезд, как разница между моментами фиксации.
7. Далее можно измерить скорость путем деления расстояния на время.
Таким образом, данная методика позволяет регистраторам транспортных средств располагаться в любой точке дороги, которая прошла предварительный обмер, и высокоточно измерять расстояние между двумя произвольно расположенными вдоль профиля автодороги координатами. Тем самым, облегчается оперативное перемещение регистраторов на другие позиции в рамках предварительно построенного профиля без необходимости физического измерения курвиметром или другими измерительными приборами. Также данная методика позволяет регистраторам транспортных средств располагаться на движущихся средствах и измерять скорость в движении. Работа регистраторов возможна в любых точках профиля автодороги и проходит в автоматическом режиме с непрерывной съемкой дороги. Регистраторы фиксируют ТС, могут определять среднюю скорость движения ТС между двумя приборами. Также формируют метаданные по каждому проезду ТС (время фиксации, местоположение прибора, тип ТС, марка ТС, модель ТС и другие метаданные). Регистраторы могут работать с использованием и без использования центров обработки данных (Вычислительных центров).
На Фиг. 3 показан пример работы комплекса мобильных регистраторов для случая определения средней скорости движения транспортного средства. МК — мобильный комплекс (РТС, установленный на мобильный объект). Н — потенциальный нарушитель (фиксируемое транспортное средство). В этом случае мобильные комплексы осуществляют по пути точное позиционирование транспортного средства (ТС), фиксируют государственный регистрационный знак, координаты и время.
Момент 1. Нарушитель (Н) обгоняет мобильный комплекс (МК1).
Момент 2. МК1 осуществляет точное позиционирование Н и фиксирует координату (S1), время (t1) и ГРЗ.
Момент 3. Нарушитель (Н) продолжает движение и попадает в поле зрения МК2.
Момент 4. МК2 осуществляет точное позиционирование Н и фиксирует координату (S2), время (t2) и ГРЗ.
Момент 5. Данные с МК1 и МК2 доставляются на управляющий сервер, где идет расчет скорости движения: v=(S2-S1)/(t2-t1).
В данном случае используется два РТС (МК1 и МК2) и удаленный центр обработки данных (управляющий сервер).
На Фиг. 4 показан пример работы комплекса мобильных регистраторов для случая выявления нарушения правил расположения.
Момент 1. Нарушитель (Н1) обгоняет мобильный комплекс (МК) по встречной полосе.
Момент 2. МК проезжает мимо другого нарушителя (Н2), двигающегося по автобусной полосе (выделенной полосе для общественного транспорта, или иной полосе с выделенным движением транспортных средств).
Момент 3. МК определяет точные координаты Н1 и Н2, фиксирует время, направление и скорость движения, распознает номерной знак, осуществляет фото-, видеосъемку событий.
Момент 4. Данные с МК доставляются в диспетчерский центр, где идет проверка возможности нахождения Н1 и Н2 в данной координате.
В данном случае используется один РТС (МК) и удаленный центр обработки данных (диспетчерский центр), где полученные автоматически сведения о нарушении могут дополнительно проверяться диспетчером.
При высоком уровне насыщения такими регистраторами, особенно в случае обязательного оснащения ими автомобилей, можно добиться тотального контроля таких нарушений, как выезд на встречную полосу, поворот не с того ряда, опасное вождение, превышение установленной скорости движения. Однако, даже внедрив их в небольшое количество транспортных средств, которые совершают регулярные или маршрутные поездки, можно создать ощущение повсеместного контроля: любая машина в потоке может оказаться прибором контроля соблюдения ПДД. В этом случае, даже в отсутствии полного покрытия видеокамерами автодорог, обеспечится контроль наиболее опасных правонарушений.
В том числе ожидается смена поведенческой модели водителя, побуждая его соблюдать правила дорожного движения на всем пути следования: «Не буду нарушать, ведь любой автомобиль в потоке может это зафиксировать». Таким образом, предложенная система позволяет увеличить безопасность дорожного движения.
Дополнительные варианты
Расстояние между проекциями может вычисляться с учетом траектории движения между ними согласно карте профиля. Это позволяет увеличить точность определения расстояния.
Предпочтительно выбирается кратчайшая траектория движения, так как в таком случае полученная средняя скорость является наименьшей, что позволяет трактовать полученные сведения в пользу водителей ТС, особенно в пользу тех, которые действительно ехали по этой траектории, не превышая допустимую скорость.
Карта профиля автодорог может дополнительно содержать данные о зонах, содержащих ограничения касательно расположения или движения на них транспортных средств. Такими зонами могут быть как непосредственно автодороги, так и автостоянки и иные территории, в том числе прилегающие территории (такую карту в общем случае можно назвать картой профиля местности). В таком случае траектория движения между проекциями вычисляется с учетом возможных ограничений и запретов. Это позволяет увеличить точность определения расстояния и потенциально выявлять те ТС, водители которых двигались по запрещенным траекториям в целях более быстрого преодоления расстояния между моментами фиксации.
Упоминавшееся выше указание, что мобильный объект, на котором установлен РТС, может находиться и перемещаться «вблизи автодороги», в рамках данного изобретения означает, что мобильный объект в момент съемки располагается и перемещается в пределах зоны, для которой имеется предварительно построенная карта профиля местности, на таком расстоянии от дороги и/или от фиксируемого транспортного средства, в пределах которого доступно точное позиционирование согласно настоящему изобретению и получение изображений приемлемого качества, то есть пригодных для получения всей требуемой информации о фиксируемом транспортном средстве, такой как государственный регистрационный знак, а также при необходимости расстояние и угол до фиксируемого транспортного средства, его направление, марку, тип и т.д. Например, если для обочины или тротуара имеется карта профиля местности, контролирующее транспортное средство, такое как велосипед с установленным на него РТС, может в процессе съемки перемещаться по обочине или тротуару.
Еще в одном варианте может производиться оценка, могло ли теоретически одно и то же ТС оказаться в разных местах в разное время фиксации. Например, если между моментами фиксации разными РТС транспортного средства с одними и теми же регистрационными знаками на расстоянии 2 км прошло 5 секунд, то понятно, что одно и то же ТС не могло преодолеть такое расстояние за такое время. Соответственно, вместо определения нарушения средней скорости в данном случае имеет место нарушение, связанное с использованием поддельных регистрационных знаков. Это позволяет повысить точность выявления нарушений и выявлять иные опасные нарушения.
Блок определения местоположения в РТС или в ВМ может также определять местоположение самого фиксируемого транспортного средства на основе карты, полученных изображений и местоположения мобильного объекта на автодороге. Данные изображения могут позволить измерить расстояние и угол относительно РТС до фиксируемого транспортного средства. Прибавив эти величины к координатам мобильного объекта, получаем местоположение фиксируемого транспортного средства. Поскольку методы определения расстояния по изображению могут быть в некоторых случаях недостаточно точными, выполняется проецирование полученного местоположения фиксируемого транспортного средства на карту профиля автодорог. Таким образом, выполняется высокоточное позиционирование фиксируемых транспортных средств, а не только самого устройства, что значительно повышает точность определения местоположения фиксируемого транспортного средства, а также позволяет использовать мобильный вариант РТС для автоматического выявления нарушений, связанных с расположением ТС.
РТС, ВМ или центр обработки данных может содержать блок выявления нарушения правил расположения транспортных средств (например, остановки, стоянки и движения), выполненный с возможностью определения, что по меньшей мере одно определенное местоположение фиксируемого транспортного средства по меньшей мере в один момент времени фиксации не соответствует зоне на карте, в которой ему разрешено располагаться. Это позволяет использовать мобильный вариант РТС для автоматического выявления нарушений, связанных с расположением ТС.
Как указывалось выше, определение скорости и выявление нарушений может выполняться удаленным центром обработки данных. В другом варианте осуществления РТС может самостоятельно выполнять эти действия.
РТС может дополнительно содержать блок определения средней скорости, выполненный с возможностью: определения, что в разные моменты времени зафиксировано одно и то же фиксируемое транспортное средство; определения разницы во времени между упомянутыми моментами фиксации для фиксируемого транспортного средства; определения расстояния между местоположениями мобильного объекта на автодороге в упомянутые моменты фиксации; и определения средней скорости фиксируемого транспортного средства на участке между упомянутыми моментами фиксации на основе упомянутых определенных разницы во времени и расстояния.
В таком случае нет необходимости связи с удаленным центром обработки данных. В одном из вариантов удаленный центр обработки данных может вообще не использоваться в такой системе. Это увеличивает автономность РТС и снижает сложность системы.
Определение средней скорости может выполняться только тогда, когда разница во времени между фиксациями больше или равна пороговой разнице или расстояние между фиксациями больше или равно пороговому расстоянию. В случае, когда ведется непрерывная съемка, один и тот же РТС может получить множество последовательных изображений с одним и тем же ТС. Точность измерений средней скорости за малый интервал времени и за малое пройденное расстояние в некоторых случаях может быть относительно низкой, поэтому может вводиться ограничение на минимальный временной промежуток между фиксациями или на расстояние между ними. Также это позволяет снизить нагрузку на вычислительные средства, чтобы они не производили лавинные вычисления между каждой парой из множества фиксаций транспортного средства, полученных за короткий промежуток.
С другой стороны, несколько фиксаций транспортного средства, полученных за короткий промежуток (временной или пространственный), могут быть использованы для усреднения местоположения данного транспортного средства на автодороге. Это еще больше может повысить точность определения местоположения фиксируемых транспортных средств и точность выявления связанных с этим нарушений. Соответственно, далее может определяться проекция усредненного местоположения фиксируемого транспортного средства на профиле автодороги в целях повышения точности позиционирования.
Выше в отношении, например, Фиг. 3 указывалось, что в разные моменты времени одно и то же фиксируемое транспортное средство может быть зафиксировано разными РТС. В другом варианте осуществления в разные моменты времени одно и то же фиксируемое транспортное средство может быть зафиксировано одним и тем же РТС. Если между моментами фиксации прошло достаточно времени, или пройдено достаточное расстояние, или в достаточной мере сменился ракурс обзора, РТС может произвести оценку тех или иных нарушений фиксируемым транспортным средством. Это еще больше увеличивает автономность РТС.
Применение
Устройства и системы согласно настоящему изобретению можно использовать на объектах дорожно-транспортной инфраструктуры.
Следует понимать, что хотя в настоящем документе для описания различных элементов, компонентов, областей, слоев и/или секций, могут использоваться такие термины, как "первый", "второй", "третий" и т.п., эти элементы, компоненты, области, слои и/или секции не должны ограничиваться этими терминами. Эти термины используются только для того, чтобы отличить один элемент, компонент, область, слой или секцию от другого элемента, компонента, области, слоя или секции. Так, первый элемент, компонент, область, слой или секция может быть назван вторым элементом, компонентом, областью, слоем или секцией без выхода за рамки объема настоящего изобретения. В настоящем описании термин "и/или" включает любые и все комбинации из одной или более из соответствующих перечисленных позиций. Элементы, упомянутые в единственном числе, не исключают множественности элементов, если отдельно не указано иное.
Функциональность элемента, указанного в описании или формуле изобретения как единый элемент, может быть реализована на практике посредством нескольких компонентов устройства, и наоборот, функциональность элементов, указанных в описании или формуле изобретения как несколько отдельных элементов, может быть реализована на практике посредством единого компонента.
В одном варианте осуществления элементы/блоки/модули предложенного устройства находятся в общем корпусе, могут быть размещены на одной раме/конструкции/печатной плате и связаны друг с другом конструктивно посредством монтажных (сборочных) операций и функционально посредством линий связи. Упомянутые линии или каналы связи, если не указано иное, являются стандартными, известными специалистам линиями связи, материальная реализация которых не требует творческих усилий. Линией связи может быть провод, набор проводов, шина, дорожка, беспроводная линия связи (индуктивная, радиочастотная, инфракрасная, ультразвуковая и т.д.). Протоколы связи по линиям связи известны специалистам и не раскрываются отдельно.
Под функциональной связью элементов следует понимать связь, обеспечивающую корректное взаимодействие этих элементов друг с другом и реализацию той или иной функциональности элементов. Частными примерами функциональной связи может быть связь с возможностью обмена информацией, связь с возможностью передачи электрического тока, связь с возможностью передачи механического движения, связь с возможностью передачи света, звука, электромагнитных или механических колебаний и т.д. Конкретный вид функциональной связи определяется характером взаимодействия упомянутых элементов, и, если не указано иное, обеспечивается широко известными средствами, используя широко известные в технике принципы.
Конструктивное исполнение элементов предложенного устройства является известным для специалистов в данной области техники и не описывается отдельно в данном документе, если не указано иное. Элементы устройства могут быть выполнены из любого подходящего материала. Эти составные части могут быть изготовлены с использованием известных способов, включая, лишь в качестве примера, механическую обработку на станках, литьё по выплавляемой модели, наращивание кристаллов. Операции сборки, соединения и иные операции в соответствии с приведенным описанием также соответствуют знаниям специалиста в данной области и, таким образом, более подробно поясняться здесь не будут.
В заявке не указано конкретное программное и аппаратное обеспечение для реализации блоков и модулей предложенного устройства (например, блока определения средней скорости), но специалисту в области техники должно быть понятно, что сущность изобретения не ограничена конкретной программной или аппаратной реализацией, и поэтому для осуществления изобретения могут быть использованы любые программные и аппаратные средства, известные в уровне техники. Так, аппаратные средства могут быть реализованы в одной или нескольких специализированных интегральных схемах, цифровых сигнальных процессорах, устройствах цифровой обработки сигналов, программируемых логических устройствах, программируемых пользователем вентильных матрицах, процессорах, контроллерах, микроконтроллерах, микропроцессорах, электронных устройствах, других электронных модулях, выполненных с возможностью осуществлять описанные в данном документе функции, компьютер либо комбинации вышеозначенного.
Специалисту в области техники должно быть также понятно, что, когда речь идет о хранении данных, программ и т.п., подразумевается наличие машиночитаемого носителя данных, примеры машиночитаемых носителей данных включают в себя постоянное запоминающее устройство, оперативное запоминающее устройство, регистр, кэш-память, полупроводниковые запоминающие устройства, магнитные носители, такие как внутренние жесткие диски и съемные диски, магнитооптические носители и оптические носители, такие как диски CD-ROM и цифровые универсальные диски (DVD), а также любые другие известные в уровне техники носители данных.
Хотя выше в явном виде не описывался способ контроля движения транспортных средств, этапы данного способа могут быть выявлены специалистом исходя из функций, выполняемых посредством вышеупомянутых устройств, блоков и модулей.
Примерные варианты осуществления обеспечивают устройства, состоящие из различных блоков и модулей, обеспечивающих функциональность для выполнения этапов способов. Блоки и модули могут быть реализованы как аппаратные средства (воплощенные в одном или нескольких чипах, включая интегральную схему, такую как специализированная интегральная схема) или могут быть реализованы как программное обеспечение или прошивка для исполнения процессором. В частности, в случае прошивки или программного обеспечения, примерные варианты осуществления могут обеспечиваться как компьютерный программный продукт, включающий в себя считываемый компьютером запоминающий носитель, воплощающий в себе компьютерный программный код (т.е., программное обеспечение или прошивку) для исполнения компьютерным процессором. Считываемый компьютером запоминающий носитель может быть долговременным (например, магнитные диски, оптические диски, постоянная память, устройства флэш-памяти, память с фазовым изменением). Связь процессора/контроллера и других компонентов обычно осуществляется через одну или несколько шин или мостов (также называемых контроллерами шин). Память данного электронного устройства обычно хранит код и/или данные для исполнения на наборе из одного или нескольких процессоров этого электронного устройства, такого как контроллер. Коды могут предписывать процессору выполнять этапы способа или функции устройства.
Несмотря на то, что примерные варианты осуществления были подробно описаны и показаны на сопроводительных чертежах, следует понимать, что такие варианты осуществления являются лишь иллюстративными и не предназначены ограничивать настоящее изобретение, и что данное изобретение не должно ограничиваться конкретными показанными и описанными компоновками и конструкциями, поскольку специалисту в данной области техники на основе информации, изложенной в описании, и знаний уровня техники могут быть очевидны различные другие модификации и варианты осуществления изобретения, не выходящие за пределы сущности и объема данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СИСТЕМА РЕГИСТРАЦИИ ДОРОЖНОЙ ОБСТАНОВКИ | 2020 |
|
RU2749527C1 |
| УСТРОЙСТВО И СИСТЕМА РЕГИСТРАЦИИ ОБЪЕКТОВ В ОБЛАСТИ АВТОДОРОГИ | 2021 |
|
RU2770145C1 |
| Система автоматической видеофиксации дорожно-транспортных происшествий на перекрестке | 2021 |
|
RU2769832C1 |
| Аппаратно-программный комплекс по мониторингу лесовозов и логистики объектов лесопромышленного комплекса | 2023 |
|
RU2826607C1 |
| Способ и система контроля нарушения скоростного режима автотранспортным средством на основе технологии радиочастотных меток | 2016 |
|
RU2648648C2 |
| Система для выявления нарушений правил дорожного движения | 2021 |
|
RU2778165C1 |
| Способ экстренного оповещения при опасных ситуациях и авариях на дорогах | 2019 |
|
RU2728951C1 |
| Система определения скорости транспортного средства на участке | 2020 |
|
RU2733638C1 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ ЗА СОБЛЮДЕНИЕМ ОГРАНИЧЕНИЙ СКОРОСТНОГО РЕЖИМА ПЕРЕДВИЖЕНИЯ АВТОТРАНСПОРТНЫХ СРЕДСТВ, ПРАВИЛ ИХ ПАРКОВКИ И ДВИЖЕНИЯ ПО ВЫДЕЛЕННОЙ ПОЛОСЕ ДЛЯ ОБЩЕСТВЕННОГО ТРАНСПОРТА | 2016 |
|
RU2634517C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2228542C1 |

Изобретение относится к устройству и системе контроля движения транспортных средств. Устройство для контроля движения транспортных средств, установленное на мобильный объект, расположенный на автодороге или вблизи нее, содержит блок навигации для определения своих географических координат и синхронизации времени на основе данных, принимаемых от глобальной навигационной спутниковой системы, с учетом поправок, получаемых от базовой станции, блок фиксации изображения фиксируемого транспортного средства, блок распознавания государственного регистрационного знака фиксируемого транспортного средства на основе зафиксированного изображения, блок определения времени фиксации для определения момента времени, блок хранения данных, полученных от блока навигации, блока фиксации, блока распознавания, блока определения времени фиксации и вычислительного модуля. Вычислительный модуль содержит блок хранения карты с профилем местности, предварительно построенной с применением высокоточного измерения координат в движении с учетом поправок, получаемых от базовой станции, и блок определения местоположения упомянутого мобильного объекта на автодороге посредством определения проекции географических координат. Достигается возможность работы в мобильном режиме. 2 н. и 16 з.п. ф-лы, 4 ил.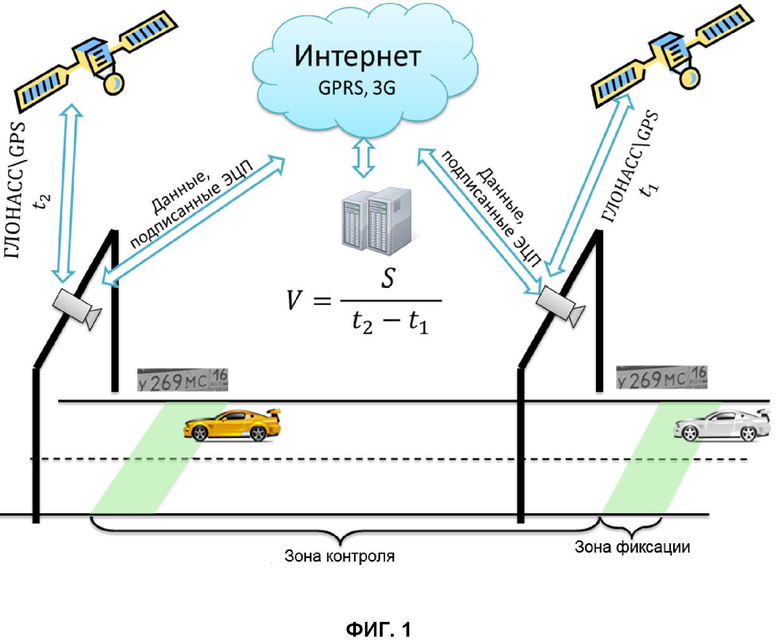
1. Устройство для контроля движения транспортных средств, установленное на мобильный объект, расположенный на автодороге или вблизи нее, и содержащее:
блок навигации, выполненный с возможностью определения своих географических координат и синхронизации времени на основе данных, принимаемых от глобальной навигационной спутниковой системы, с учетом поправок, получаемых от базовой станции;
блок фиксации, содержащий фотокамеру и/или видеокамеру и выполненный с возможностью фиксации изображения фиксируемого транспортного средства, находящегося в поле обзора блока фиксации;
блок распознавания, выполненный с возможностью распознавания государственного регистрационного знака фиксируемого транспортного средства на основе зафиксированного изображения;
блок определения времени фиксации, выполненный с возможностью определения момента времени, в который было зафиксировано изображение фиксируемого транспортного средства, на основе данных о времени от блока навигации;
блок хранения данных, выполненный с возможностью хранения данных, полученных от блока навигации, блока фиксации, блока распознавания, блока определения времени фиксации и вычислительного модуля; и
вычислительный модуль, содержащий:
- блок хранения карты, выполненный с возможностью хранения карты с профилем местности, предварительно построенной с применением высокоточного измерения координат в движении с учетом поправок, получаемых от базовой станции; и
- блок определения местоположения, выполненный с возможностью определения местоположения упомянутого мобильного объекта на автодороге посредством определения проекции географических координат, определенных блоком навигации в момент фиксации изображения фиксируемого транспортного средства, на профиле местности, сохраненном в блоке хранения карты.
2. Устройство по п. 1, дополнительно содержащее:
блок формирования метаданных, выполненный с возможностью формирования метаданных по каждому зафиксированному транспортному средству на основе данных, полученных от блока навигации, блока фиксации, блока распознавания, блока определения времени фиксации и вычислительного модуля; и
передатчик, выполненный с возможностью передачи сформированных метаданных в центр обработки данных и/или на другое устройство для контроля движения транспортных средств.
3. Устройство по п. 1, дополнительно содержащее:
приемник, выполненный с возможностью приема метаданных от центра обработки данных и/или от другого устройства для контроля движения транспортных средств.
4. Устройство по п. 1, в котором карта дополнительно содержит данные о зонах, содержащих ограничения касательно расположения или движения на них транспортных средств;
причем устройство дополнительно содержит:
блок выявления нарушения правил расположения транспортных средств, выполненный с возможностью определения, что по меньшей мере одно определенное местоположение фиксируемого транспортного средства по меньшей мере в один момент времени фиксации не соответствует зоне на карте, в которой ему разрешено располагаться.
5. Устройство по п. 1, дополнительно содержащее:
блок определения средней скорости, выполненный с возможностью:
определения, что в разные моменты времени зафиксировано одно и то же фиксируемое транспортное средство,
определения разницы во времени между упомянутыми моментами фиксации для фиксируемого транспортного средства,
определения расстояния между местоположениями мобильного объекта на автодороге в упомянутые моменты фиксации,
определения средней скорости фиксируемого транспортного средства на участке между упомянутыми моментами фиксации на основе упомянутых определенных разницы во времени и расстояния.
6. Устройство по п. 5, в котором определение средней скорости выполняется только тогда, когда упомянутая определенная разница во времени больше или равна пороговой разнице или упомянутое определенное расстояние больше или равно пороговому расстоянию.
7. Устройство по п. 4 или 5, в котором в разные моменты времени одно и то же фиксируемое транспортное средство зафиксировано разными устройствами для контроля движения транспортных средств.
8. Устройство по п. 4 или 5, в котором в разные моменты времени одно и то же фиксируемое транспортное средство зафиксировано данным устройством.
9. Устройство по п. 1, в котором блок определения местоположения дополнительно выполнен с возможностью определения местоположения фиксируемого транспортного средства на основе карты, полученных изображений и местоположения мобильного объекта на автодороге.
10. Устройство по п. 9, в котором блок определения местоположения дополнительно выполнен с возможностью определения усредненного местоположения фиксируемого транспортного средства на основе нескольких фиксаций транспортного средства, полученных за короткий промежуток времени или расстояния.
11. Устройство по п. 9, в котором определение местоположения фиксируемого транспортного средства выполняется посредством определения проекции на профиле местности географических координат фиксируемого транспортного средства, полученных посредством определения его положения относительно географических координат мобильного объекта на основе полученных изображений.
12. Устройство по п. 11, в котором положение фиксируемого транспортного средства относительно мобильного объекта определяется на основе расстояния и угла относительно мобильного объекта до фиксируемого транспортного средства, определенных на основе полученных изображений.
13. Устройство по п. 1, причем мобильным объектом является контролирующее транспортное средство, беспилотный аппарат, человек или животное.
14. Устройство по п. 1, в котором поправки, получаемые от базовой станции, реализованы согласно системе дифференциальной коррекции.
15. Устройство по п. 1, в котором упомянутая проекция определяется по кратчайшему расстоянию между упомянутыми определенными географическими координатами и координатами профиля местности.
16. Система для контроля движения транспортных средств, содержащая:
- регистратор транспортных средств (РТС), установленный на контролирующее транспортное средство, расположенное на автодороге или вблизи нее, и содержащий:
блок навигации, выполненный с возможностью определения своих географических координат и синхронизации времени на основе данных, принимаемых от глобальной навигационной спутниковой системы, с учетом поправок, получаемых от базовой станции;
блок фиксации, содержащий фотокамеру и/или видеокамеру и выполненный с возможностью фиксации изображения фиксируемого транспортного средства, находящегося в поле обзора блока фиксации;
блок распознавания, выполненный с возможностью распознавания государственного регистрационного знака фиксируемого транспортного средства на основе зафиксированного изображения;
блок определения времени фиксации, выполненный с возможностью определения момента времени, в который было зафиксировано изображение фиксируемого транспортного средства, на основе данных о времени от блока навигации;
блок хранения данных, выполненный с возможностью хранения данных, полученных от блока навигации, блока фиксации, блока распознавания и блока определения времени фиксации;
блок формирования метаданных, выполненный с возможностью формирования метаданных по каждому зафиксированному транспортному средству на основе данных, полученных от блока навигации, блока фиксации, блока распознавания и блока определения времени фиксации;
передатчик, выполненный с возможностью передачи сформированных метаданных в центр обработки данных, на вычислительный модуль и/или на другой РТС;
приемник, выполненный с возможностью приема метаданных от центра обработки данных, от вычислительного модуля и/или от другого РТС;
- вычислительный модуль, содержащий:
блок хранения карты, выполненный с возможностью хранения карты с профилем местности, предварительно построенной с применением высокоточного измерения координат в движении с учетом поправок, получаемых от базовой станции; и
блок определения местоположения, выполненный с возможностью определения местоположения упомянутого мобильного объекта на автодороге посредством определения проекции географических координат, определенных блоком навигации в момент фиксации изображения фиксируемого транспортного средства, на профиле местности, сохраненном в блоке хранения карты.
17. Система по п. 16, дополнительно содержащая центр обработки данных, выполненный с возможностью приема, обработки, передачи и хранения метаданных о фиксации транспортных средств и выявления нарушений транспортными средствами правил дорожного движения на основе упомянутых метаданных.
18. Система по п. 17, в которой вычислительный модуль расположен в центре обработки данных, непосредственно у дороги или внутри РТС.
| 0 |
|
SU161006A1 | |
| 0 |
|
SU161004A1 | |
| НАВЕСНАЯ СТРЕЛА С ВАКУУМНЫМ ЗАХВАТОМ | 0 |
|
SU179452A1 |

