Изобретение относится к области автоматизированных зарядных устройств для электрических транспортных средств.
Известна зарядная станция для электромобилей, которая содержит зарядный терминал для зарядки по крайней мере одного электрического транспортного средства с использованием получаемой из сети электроснабжения электрической энергии, средство для получения электрической энергии из сети электроснабжения - силовую часть, блок управления зарядной станцией, при этом в одном корпусе зарядного терминала установлено нескольких силовых частей, имеющих одну общую точку подключения к электрической сети, через общую шину, а также блок управления, содержащий контроллер, выполненный с возможностью одновременного установления соединения с несколькими электромобилями по pilot протоколу, включая управление допустимой потребляемой мощностью, которое осуществляется на стороне электромобиля, но управляется с блока управления терминала зарядной станции, а силовая часть выполнена с возможностью подключать и отключать подачу питания одновременно на несколько электромобилей за счет реализации на симисторных коммутаторах [патент РФ №2778134, B60L 53/63, B60L 53/66, H02J 7/04, опубл. 15.08.2022].
Недостатками аналога являются отсутствие возможности передвижения по улицам или паркингу, что ухудшает мобильность зарядного устройства, не позволяет в автоматизированном режиме заряжать электрические автомобили поочередно и отсутствует автоматизация подключение зарядного кабеля, что обуславливает необходимость вмешательства человека.
Известна зарядная станция, которая содержит контроллер, порт для связи с контроллером электромобиля, измерительные блоки, устройство записи и хранения данных, силовой модуль, порт для подключения к источнику электроэнергии, порт для передачи электроэнергии электромобилю, источник бесперебойного питания и устройство флэш-памяти. Контроллер связан с: портом для связи с контроллером электромобиля, измерительными блоками, устройством записи и хранения данных и силовым модулем. Силовой модуль содержит силовой преобразователь. Силовой преобразователь связан с портом для подключения к источнику электроэнергии и с портами для передачи электроэнергии электромобилю. Устройство записи и хранения данных выполнено в виде блока регистрации данных. Блок регистрации данных содержит контроллер блока регистрации. Блок регистрации данных связан с источником бесперебойного питания. Источник бесперебойного питания содержит аккумуляторную батарею [патент РФ №2781879, B60L 53/30, опубл. 15.08.2022].
Недостатками аналога являются отсутствие возможности передвижения по улицам или паркингу, что ухудшает мобильность зарядного устройства, не позволяет в автоматизированном режиме заряжать электрические автомобили поочередно и отсутствует автоматизация подключение зарядного кабеля, что обуславливает необходимость вмешательства человека.
Известна автоматическая подключаемая станция для зарядки электромобилей. Станция включает в себя штекерное устройство со штекерной головкой, которое подключается к адаптеру на электромобиле и сконфигурировано для передачи электрического заряда на аккумулятор электромобиля. Штекерное устройство автоматически выдвигается из раковины, как только система позиционирования устанавливает правильную центровку. Перед зарядкой штепсельное устройство закрывается внутри резервуара крышкой-дверцей, которая открывается приводом, когда транспортное средство въезжает на станцию; и по завершении зарядки штекер автоматически отсоединяется от автомобиля и убирается обратно на зарядную станцию. Подключаемая станция также обеспечивает прием и обработку платежей в платежной системе на станции [патент US 20110066515 A1, G06Q 50/00, H02J 7/00, G06Q 20/00, опубл. 17.03.2011].
Недостатками аналога являются отсутствие возможности перемещения, невысокое быстродействие, обусловленное необходимостью точного позиционирования штекера с последующим подключением, и невысокая надежность, обусловленная высокой степенью механизации.
Известна мобильная зарядная станция и способ зарядки электромобиля, содержащей по меньшей мере один аккумуляторный блок, по меньшей мере один интерфейс зарядки для зарядки аккумуляторного блока, по меньшей мере один второй интерфейс для зарядки электромобиля от аккумуляторного блока, средство автоматической навигации по мобильной зарядной станции и средство для приема запроса на зарядку. Изобретение дополнительно относится к способу зарядки электромобиля [патент WO №2019/091674 A1, B60S 5/06, опубл. 16.05.2019].
Недостатком являются ограниченные функциональные возможности, что обусловлено возможностью зарядки только одного вида электрических транспортных средств, а также невысокая эргономичность системы, обусловленная ее многокомпонентностью и наличием множественных связей между ее компонентами.
Известно роботизированное устройство для зарядки электромобилей, способное автоматически подключаться к электрическому зарядному разъему для зарядки аккумуляторной батареи транспортного средства с электрическим приводом. По завершении зарядки устройство отсоединится от транспортного средства и отойдет от транспортного средства. [патент US 9056555 B1, H02J 7/00, H02J 7/1, B60L 11/18, опубл. 16.06.2015].
Недостатками аналога являются его высокие масса и габариты, обусловленная большим количеством шарнирных соединений с несколькими степенями свободы и невысокая автономность, обусловленная необходимостью его подключения к электрической сети.
Известен способ зарядки электромобиля, в котором предусмотрены система и способ доставки электрической энергии к электромобилю через электрические зарядные станции или киоски, где точка доставки энергии сконфигурирована для подачи энергии к электромобилю через разъем или беспроводной источник энергии. Способ включает в себя зарядку электромобиля путем обнаружения с помощью считывателя RFID-меток, связанного с электромобилем, сигналов, исходящих от маркера, расположенного на земле, где маркер включает в себя одну или более RFID-меток, и где считыватель RFID-меток способен распознавать сигналы, несмотря на погодные условия, когда земля покрыта снегом. [патент US 20230153554 A11, H02J 7/00, H02J 7/1, B60L 11/18, опубл. 18.05.2023].
Недостатками данного способа являются невысокая эффективность зарядного устройства и невысокая автономность, обусловленная необходимостью его подключения к электрической сети.
Известна система и способ авторизации автономной станции зарядки электромобилей, которая включает в себя зарядную станцию и сетевой сервер зарядки, при этом сетевой сервер зарядки поддерживает сетевую связь с зарядной станцией и приложением для мобильного устройства. В зарядной станции и зарядки сервера сети включают в себя вычислительные устройства запрограммированы: хранить код авторизации на каждого сервера, сети и зарядной станции для авторизации зарядки электротранспорта когда зарядная станция находится в автономном режиме от зарядки, сетевой сервер, процесс зарядки авторизации запрос на зарядный сетевой сервер, отправленные из мобильного приложения устройства, передать код авторизации от сервера сети на мобильное устройство приложения реагировать на зарядку запрос авторизации и когда зарядная станция находится в автономном режиме, и разрешать или запрещать зарядки электротранспорта зависимости от того, "код авторизации" вход на зарядной станции матчи код авторизации хранятся на зарядные станции. [патент US 10406930 B2, B60L 11/08, G06F 1/06, опубл. 10.09.2019].
Недостатками аналога являются отсутствие возможности передвижения по улицам или паркингу, что ухудшает мобильность зарядного устройства, не позволяет в автоматизированном режиме заряжать электрические автомобили поочередно и отсутствует автоматированное подключение зарядного кабеля, что обуславливает необходимость вмешательства человека.
Задача и технический результат изобретения - расширение функциональных возможностей электрозарядной станции и сокращение трудоемкости заряда электромобиля за счет уменьшения доли участия человека.
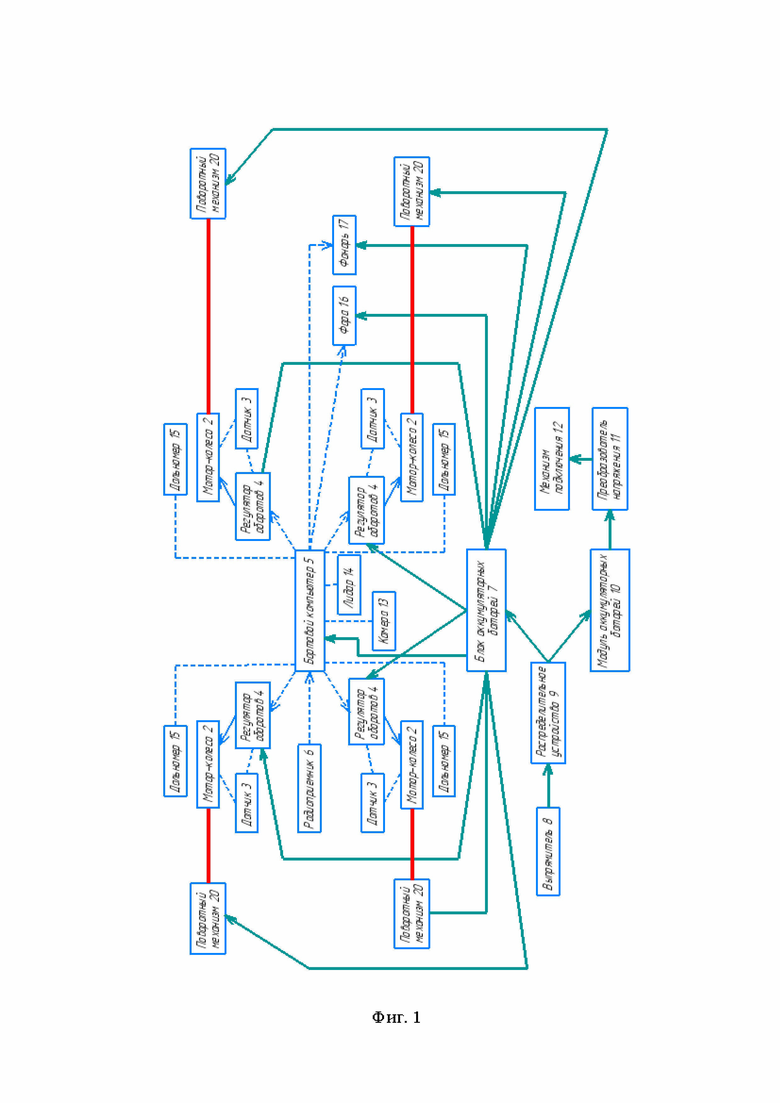
Поставленная задача решается, а технический результат достигается тем, что автоматизированная мобильная зарядная станция содержит установленные на раме четыре мотор-колеса, четыре датчика, соединенных с мотор-колесами, четыре регулятора оборотов, соединенных с датчиками и мотор-колесами, бортовой компьютер, соединенный с регуляторами оборотов и с радиоприемником, блок аккумуляторных батарей, соединенный с регуляторами оборотов и бортовым компьютером, распределительное устройство, соединенное с выпрямителем, блоком аккумуляторных батарей и модулем аккумуляторных батарей, соединенным с механизмом подключения посредством преобразователя напряжения, камеру, лидар и четыре дальномера, соединенные с бортовым компьютером, фару и фонарь, соединенные с блоком аккумуляторных батарей и бортовым компьютером, причем зарядная станция закрыта кожухом, закрепленным на раме.
Механизм подключения может быть выполнен в виде роботизированной руки.
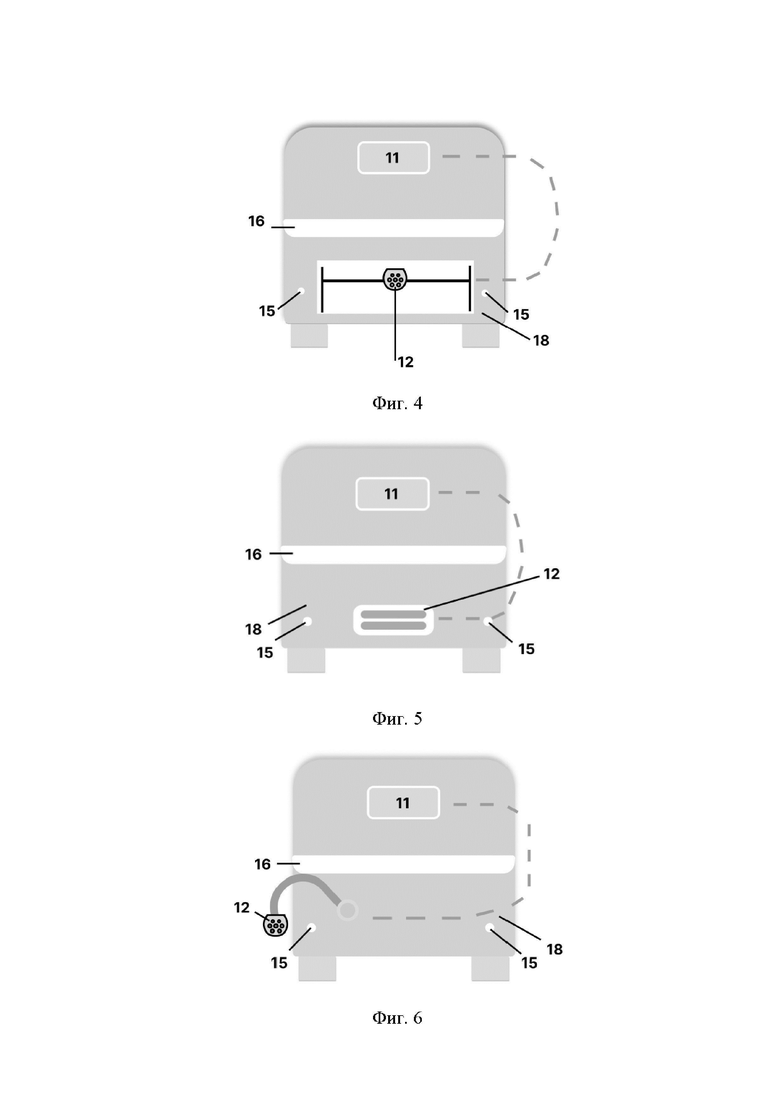
Механизм подключения может быть выполнен в виде рельсовой системы с подвижным разъемом.
Механизм подключения может быть выполнен в виде контактных площадок.
Механизм подключения может быть выполнен в виде электрического кабеля с разъемом на конце.
Автоматизированная мобильная зарядная станция может содержать амортизаторы, которые крепятся к мотор-колесам и раме.
Автоматизированная мобильная зарядная станция может содержать поворотные механизмы, которые крепятся к раме и на которые крепятся мотор-колеса.
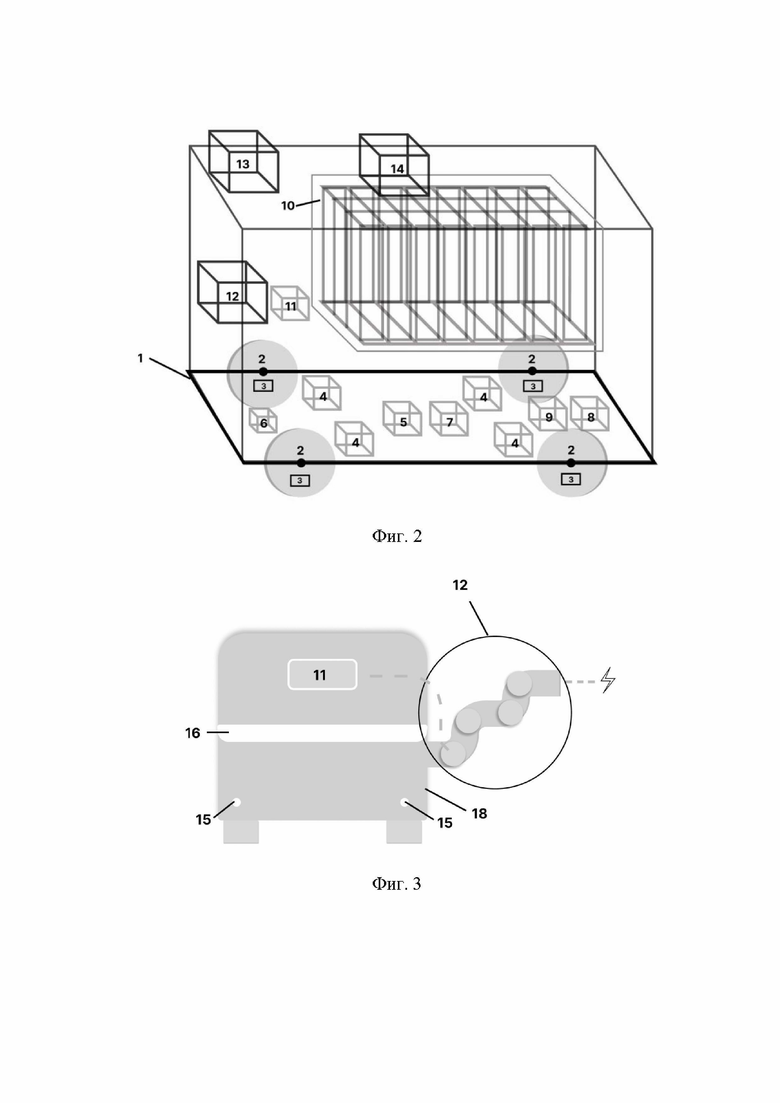
Сущность изобретения поясняется чертежами. На фиг. 1 показана структурная схема автоматизированной мобильной зарядной станции. На фиг. 2 показан внешний вид автоматизированной мобильной зарядной станции. На фиг. 3 представлен внешний вид автоматизированной мобильной зарядной станции с механизмом подключения, выполненным в виде роботизированной руки. На фиг. 4 представлен внешний вид автоматизированной мобильной зарядной станции с механизмом подключения, выполненным в виде рельсовой системы с подвижным разъемом. На фиг. 5 представлен внешний вид автоматизированной мобильной зарядной станции с механизмом подключения, выполненным в виде контактных площадок. На фиг. 6 представлен внешний вид автоматизированной мобильной зарядной станции с механизмом подключения, выполненным в виде электрического кабеля с разъемом на конце. На фиг. 7 представлена автоматизированная мобильная зарядная станция с амортизаторами. На фиг. 8 представлена автоматизированная мобильная зарядная станция с поворотными механизмами мотор-колес.
Автоматизированная мобильная зарядная станция состоит из рамы 1, четырех мотор-колес 2, четырех датчиков 3, четырех регуляторов оборотов 4, бортового компьютера 5, радиоприемника 6, блока аккумуляторных батарей 7, выпрямителя 8, распределительного устройства 9, модуля аккумуляторных батарей 10, преобразователя напряжения 11, механизма подключения 12, камеры 13, лидара 14, четырех дальномеров 15, фары 16, фонаря 17 и кожуха 18. Механизм подключения 12 может быть выполнен в виде роботизированной руки (фиг. 3), рельсовой системы с подвижным разъемом (фиг. 4), контактных площадок (фиг. 5) или электрического кабеля с разъемом на конце (фиг. 6). Автоматизированная мобильная зарядная станция может дополнительно содержать четыре амортизатора 19 (фиг. 7). Автоматизированная мобильная зарядная станция может дополнительно содержать четыре поворотных механизма 20 (фиг. 8).
На раму 1 прикрепляются четыре мотор-колеса 2 с помощью резьбовых или сварочных соединений. Рама 1 может быть выполнена из металла, пластмассы или композитного материала. Мотор-колесо 2 представляет собой электродвигатель с внешним ротором на роторе которого закреплена покрышка. Статоры мотор-колес неподвижно прикрепляются на раму 1. На каждом из мотор-колес 2 прикрепляется датчик 3 посредством резьбового или клеевого соединения. Датчик 3 выполняет функцию отслеживания положения ротора мотор-колеса 2. Датчики 3 получают питание от регуляторов оборотов 4. Четыре регулятора оборотов 4 прикрепляются на раму 1 при помощи резьбовых соединений, или клеевых соединений, или пазовых соединений. Каждый из регуляторов оборотов 4 соединяется с одним датчиком 3 и с одним мотор-колесом 2. Бортовой компьютер 5 прикрепляется на раму 1 при помощи резьбовых соединений, или клеевых соединений, или пазовых соединений. Бортовой компьютер 5 электрически соединен с регуляторами оборотов 4. Бортовой компьютер 5 получает питание от блока аккумуляторных батарей 7. Радиоприемник 6 прикрепляется на раму 1 при помощи резьбовых соединений, или клеевых соединений, или пазовых соединений. Радиоприемник 6 посредством беспроводного канала соединяется со станцией управления 19 и электрически соединяется с бортовым компьютером 5. Радиоприемник 6 получает питание от бортового компьютера 5. Блок аккумуляторных батарей 7 прикрепляется на раму 1 при помощи резьбовых соединений, или клеевых соединений, или пазовых соединений, или сварочных соединений. Блок аккумуляторных батарей 7 электрически соединяется с регуляторами оборотов 4 и бортовым компьютером 5. Выпрямитель 8 прикрепляется на раму 1 при помощи резьбовых соединений, или клеевых соединений, или пазовых соединений, или сварочных соединений. Распределительное устройство 9 прикрепляется на раму 1 при помощи резьбовых соединений, или клеевых соединений, или пазовых соединений, или сварочных соединений. Выпрямитель 8 электрически соединяется с распределительным устройством 9. Распределительное устройство 9 электрически соединяется с блоком аккумуляторных батарей 7. Модуль аккумуляторных батарей 10 прикрепляется на раму 1 при помощи резьбовых соединений, или клеевых соединений, или пазовых соединений, или сварочных соединений. Преобразователь напряжения 11 прикрепляется на раму 1 при помощи резьбовых соединений, или клеевых соединений, или пазовых соединений, или сварочных соединений. Преобразователь напряжения 11 электрически соединяется с модулем аккумуляторных батарей 10. Механизм подключения 12 прикрепляется на раму 1 при помощи резьбовых соединений, или пазовых соединений, или сварочных соединений. Механизм подключения 12 электрически соединяется с преобразователем напряжения 11. Механизм подключения 12 может быть выполнен в виде роботизированной руки, в виде рельсовой системы с подвижным разъемом, в виде контактных площадок или в виде электрического кабеля с разъемом на конце. Камера 13 и лидар 14 прикрепляются на раме 1 при помощи резьбовых или пазовых соединений. Камера 13 и лидар 14 электрически соединяются с бортовым компьютером 5. Четыре дальномера 15 электрически соединены с бортовым компьютером 5. Камера 13, лидар 14 и дальномеры 15 получают питание от бортового компьютера 5. Фара 16 и фонарь 17 прикрепляется на раму 1 при помощи резьбовых соединений или пазовых соединений. Фара 16 и фонарь 17 электрически соединяются с блоком аккумуляторных батарей 7 и бортовым компьютером 5. Фара 16 и фонарь 17 получают питание от блока аккумуляторных батарей 7 и сигналы на включение и выключение от бортового компьютера 5. Фара 16 предназначена для освещения пространства перед автоматизированной мобильной зарядной станцией в темное время суток и в условиях плохой видимости. Фонарь 17 предназначен для обеспечения видимости автоматизированной мобильной зарядной станции в темное время суток и в условиях плохой видимости. На раму 1 при помощи резьбовых соединений или пазовых соединений прикрепляется кожух 18. В кожухе 18 выполнены прорези для камеры 13, лидара 14, дальномеров 15, фары 16 и фонаря 17. Кожух 18 предназначен для защиты элементов автоматизированной мобильной зарядной станции от воздействий окружающей среды. Кожух 18 может быть выполнен из пластмассы, металла или композитного материала. Автоматизированная может содержать четыре амортизатора 19, которые крепятся к раме 1 при помощи резьбовых соединений. При этом каждое мотор-колесо 2 крепится на амортизатор 20 при помощи резьбовых соединений. Амортизаторы 19 обеспечивают снижение уровня ударных и вибрационных нагрузок на комплектующие автоматизированной мобильной зарядной станции. Также амортизаторы 19 позволяют автоматизированной мобильной зарядной станции преодолевать препятствия. Автоматизированная мобильная зарядная станция может содержать поворотные механизмы 20. Поворотные механизмы 20 крепятся на раму 1 при помощи резьбовых или сварочных соединений. Каждое из мотор-колес 2 крепится на поворотный механизм 20 за счет резьбовых соединений или пазовых соединений. Поворотный механизм 20 представляет собой привод, который позволяет поворачивать мотор-колеса 2 на определенный угол в горизонтальной плоскости. Поворотный механизм 20 может быть выполнен, например, в виде сервопривода. Поворотные механизмы получают питание от блока аккумуляторных батарей 7.
Автоматизированная зарядная станция функционирует в режиме накопления электроэнергии следующим образом. Выпрямитель 8 подключается посредством встроенного в него разъема к сети переменного тока. Выпрямленное напряжение после выпрямителя 8 поступает на распределительное устройство 9, которое распределяет поступающее выпрямленное напряжение на два канала и обеспечивает необходимые зарядные токи и напряжения для зарядки блока аккумуляторных батарей 7 и модуля аккумуляторных батарей 10 по двум соответствующим каналам. По одному из каналов выпрямленное напряжение поступает от распределительного устройства 9 на модуль аккумуляторных батарей 10. В результате этого происходит заряд модуля аккумуляторных батарей 10. По другому каналу выпрямленное напряжение поступает от распределительного устройства 9 на блок аккумуляторных батарей 7. В результате этого происходит заряд блока аккумуляторных батарей 7. По окончании заряда блока аккумуляторных батарей 7 и модуля аккумуляторных батарей 10 бортовой компьютер 5 передает сигнал о готовности к работе на внешнюю станцию управления.
Автоматизированная мобильная зарядная станция функционирует в режиме управляемого передвижения следующим образом. С внешней станции управления передаются управляющие сигналы на радиоприемник 6. От радиоприемника 6 получаемые управляющие сигналы передаются на бортовой компьютер 5. От бортового компьютера 5 в зависимости от поступающего управляющего сигнала формируется управляющее воздействие на регуляторы оборотов 4. На регуляторы оборотов 4 также поступает информация о положении роторов мотор-колес 2. В зависимости от информации, поступающей с бортового компьютера 5, и информации, поступающей с датчиков 3, регуляторы оборотов 4 формируют сигналы на мотор-колеса 2. Регуляторы оборотов 4 получают питание постоянного напряжения от блока аккумуляторных батарей 7 и преобразуют его в питание переменного тока определенной величины в зависимости от управляющего воздействия, поступающего с бортового компьютера 5. Питание переменного тока с регуляторов оборотов 4 поступает на мотор-колеса 2. В результате этого автономная мобильная зарядная станция приходит в движение. При необходимости поворота в право или влево бортовой компьютер 5 формирует управляющее воздействие на регуляторы оборотов 4 таким образом, что два мотор-колеса 2, расположенные по одному борту автоматизированной мобильной зарядной станции, затормаживаются, а два мотор-колеса 2, расположенные по другому борту автоматизированной мобильной зарядной станции, продолжают вращение с той же частотой или увеличивают свою частоту вращения. В результате этого происходит поворот автоматизированной мобильной зарядной станции налево или направо.
Автоматизированная мобильная зарядная станция функционирует в режиме автоматического передвижения следующим образом. В бортовой компьютер 5 поступает информация с камеры 13, лидара 14 и парктроников 15. На основании этого бортовой компьютер 5 прокладывает маршрут автоматизированной мобильной зарядной станции. В зависимости от построенного маршрута бортовой компьютер 5 формирует управляющие воздействие регуляторы оборотов 4. На регуляторы оборотов 4 также поступает информация о положении роторов мотор-колес 2. В зависимости от информации, поступающей с бортового компьютера 5, и информации, поступающей с датчиков 3, регуляторы оборотов 4 формируют сигналы на мотор-колеса 2. Регуляторы оборотов 4 получают питание постоянного напряжения от блока аккумуляторных батарей 7 и преобразуют его в питание переменного тока определенной величины в зависимости от управляющего воздействия, поступающего с бортового компьютера 5. Питание переменного тока с регуляторов оборотов 4 поступает на мотор-колеса 2. В результате этого автономная мобильная зарядная станция приходит в движение. При необходимости поворота в право или влево бортовой компьютер 5 формирует управляющее воздействие на регуляторы оборотов 4 таким образом, что два мотор-колеса 2, расположенные по одному борту автоматизированной мобильной зарядной станции, затормаживаются, а два мотор-колеса 2, расположенные по другому борту автоматизированной мобильной зарядной станции, продолжают вращение с той же частотой или увеличивают свою частоту вращения. В результате этого происходит поворот автоматизированной мобильной зарядной станции налево или направо. На внешней станции управления установлено программное обеспечение, с помощью которого могут выдаваться навигационные задачи в бортовой компьютер 5 автоматизированной мобильной зарядной станции. При возникновении на пути автоматизированной мобильной зарядной станции препятствий бортовой компьютер 5 вносит изменения в построенный маршрут за счет использования программного обеспечения на основе искусственного интеллекта, установленного в нем.
В обоих вышеперечисленных режимах передвижения конечной точкой маршрута является электромобиль, который автоматизированная мобильная зарядная станция должна зарядить.
На автоматизированной мобильной зарядной станции по пункту 6 могут быть установлены поворотные механизмы 20. При этом при необходимости поворота автоматизированной мобильной зарядной станции управляющий сигнал поступает на поворотные механизмы 20, которые обеспечивают передвижение автоматизированной мобильной зарядной станции в необходимом направлении в зависимости от сигнала, поступающего с бортового компьютера 5. Четыре мотор-колеса 2 при этом вращаются с одинаковой частотой вращения.
Автоматизированная мобильная зарядная станция в режиме заряда электромобиля функционирует следующим образом. После передвижения автоматизированной мобильной зарядной станции к электромобилю, который необходимо зарядить, бортовой компьютер 5 формирует сигнал на механизм подключения 12 о необходимости подключения к разъему электромобиля. Если механизм подключения 12 автоматизированной мобильной зарядной станции выполнен в виде роботизированной руки, то бортовой компьютер 5 формирует управляющие воздействия таким образом, что звенья механизма подключения 12, выполненного в виде роботизированной руки, перемещаются таким образом, что расположенный на механизме подключения 12 разъем соединяется с разъемом электромобиля, который необходимо зарядить. Если автоматизированная мобильная зарядная станция выполнена по пункту 2, механизм подключения 12 выполнен в виде рельсовой системы с подвижным разъемом, то бортовой компьютер 5 формирует управляющие воздействия таким образом, что разъем механизма подключения 12, выполненного в виде рельсовой системы с подвижным разъемом, перемещается по горизонтали и вертикали так, чтобы его контакты совпали с гнездами разъема электромобиля, который необходимо зарядить. После этого механизм подключения 12 соединяет соединяется с разъемом электромобиля, который необходимо зарядить. Если автоматизированная мобильная зарядная станция выполнена по пункту 3, механизм подключения 12 выполнен в виде контактных площадок, то бортовой компьютер 5 формирует маршрут автоматизированной мобильной зарядной станции таким образом, чтобы механизм подключения 12, выполненный в виде контактных площадок, при подъезде автоматизированной мобильной зарядной станции к электромобилю совпадал с разъемом на электромобиле, который необходимо зарядить. При этом автоматизированная мобильная зарядная станция подъезжает к электромобилю, который необходимо зарядить, таким образом, чтобы механизм подключения 12, выполненный в виде контактных площадок, соединялся с разъемом электромобиля, который необходимо зарядить. Если автоматизированная мобильная зарядная станция выполнена по пункту 4, механизм подключения 12 выполнен в виде электрического кабеля с разъемом на конце, то после того, как автоматизированная мобильная зарядная станция подъезжает к электромобилю, который необходимо зарядить, человек соединяет механизм подключения 12, выполненный в виде электрического кабеля с разъемом на конце, с разъемом электромобиля, который необходимо зарядить. После соединения механизма подключения 12 с электромобилем, который необходимо зарядить, преобразователь напряжения 11 подает постоянное напряжение на разъем электромобиля, который необходимо зарядить. Преобразователь напряжения 11 преобразует напряжение постоянного тока от модуля аккумуляторных батарей 10 и подает его на разъем электромобиля, который необходимо зарядить. Таким образом происходит зарядка аккумуляторных батарей электромобиля, который необходимо зарядить. После окончания зарядки электромобиля, который необходимо зарядить, происходит отключение механизма подключения 12 от разъема электромобиля, и автоматизированная мобильная зарядная станция в режиме управляемого передвижения или в режиме автоматического передвижения возвращается к месту, где она функционирует в режиме накопления электроэнергии. Маршрут автоматизированной мобильной зарядной станции может быть построен таким образом, что в его пределах автоматизированная мобильная зарядная станция выполнит заряд нескольких электромобилей, которые необходимо зарядить.
Таким образом, заявленное изобретение позволяет сократить время заряда электромобиля с сопутствующим уменьшением стоимости заряда электромобиля за счет уменьшения доли участия человека.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| Система распределенной сети электрозарядной инфраструктуры мобильного электротранспорта | 2018 |
|
RU2727221C1 |
| Система управления энергоустановкой беспилотного гибридного автомобиля | 2019 |
|
RU2733599C1 |
| Зарядная станция электромобилей | 2022 |
|
RU2781879C1 |
| Базовая платформа автономного интеллектуального робототехнического комплекса (АИРТК) | 2021 |
|
RU2764910C1 |
| Комплект учебных стендов-тренажеров для изучения конструкции агрегатов и узлов электромобиля | 2024 |
|
RU2838715C1 |
| СПОСОБ И УСТРОЙСТВО ПЕРЕДАЧИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ПРИ ДВИЖЕНИИ БЕЗРЕЛЬСОВОМУ ЭЛЕКТРО- И ГИБРИДНОМУ ТРАНСПОРТУ | 2017 |
|
RU2679489C9 |
| ЭЛЕКТРОМОБИЛЬ | 1992 |
|
RU2048309C1 |
| Электроаккумуляторное устройство модульного типа | 2022 |
|
RU2784016C1 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ ЗАРЯДНОГО УСТРОЙСТВА | 2024 |
|
RU2831527C1 |

Изобретение относится к автоматизированной мобильной зарядной станции. Станция содержит: четыре мотор-колеса с датчиками и регуляторами оборотов, бортовой компьютер, радиоприемник, блок аккумуляторных батарей, распределительное устройство, выпрямитель, модуль аккумуляторных батарей, механизм подключения, преобразователь напряжения, камеру, лидар и четыре дальномера, фару и фонарь, кожух. Регуляторы оборотов соединены с датчиками и мотор-колесами. Бортовой компьютер соединен с регуляторами оборотов и с радиоприемником. Блок аккумуляторных батарей соединен с регуляторами оборотов и бортовым компьютером. Распределительное устройство соединено с выпрямителем, блоком аккумуляторных батарей и модулем аккумуляторных батарей. Модуль аккумуляторных батарей соединен с механизмом подключения посредством преобразователя напряжения. Камера, лидар и дальномеры соединены с бортовым компьютером. Фара и фонарь соединены с блоком аккумуляторных батарей и бортовым компьютером. Кожух закрывает зарядную станцию от воздействий окружающей среды. Достигается расширение функциональных возможностей электрозарядной станции и сокращение трудоемкости заряда электромобиля. 6 з.п. ф-лы, 8 ил.
1. Автоматизированная мобильная зарядная станция, содержащая установленные на раме четыре мотор-колеса, четыре датчика, соединенных с мотор-колесами, четыре регулятора оборотов, соединенных с датчиками и мотор-колесами, бортовой компьютер, соединенный с регуляторами оборотов и с радиоприемником, блок аккумуляторных батарей, соединенный с регуляторами оборотов и бортовым компьютером, распределительное устройство, соединенное с выпрямителем, блоком аккумуляторных батарей и модулем аккумуляторных батарей, соединенным с механизмом подключения посредством преобразователя напряжения, камеру, лидар и четыре дальномера, соединенные с бортовым компьютером, фару и фонарь, соединенные с блоком аккумуляторных батарей и бортовым компьютером, причем зарядная станция закрыта кожухом, закрепленным на раме.
2. Автоматизированная мобильная зарядная станция по п. 1, отличающаяся тем, что механизм подключения выполнен в виде роботизированной руки.
3. Автоматизированная мобильная зарядная станция по п. 1, отличающаяся тем, что механизм подключения выполнен в виде рельсовой системы с подвижным разъемом.
4. Автоматизированная мобильная зарядная станция по п. 1, отличающаяся тем, что механизм подключения выполнен в виде контактных площадок.
5. Автоматизированная мобильная зарядная станция по п. 1, отличающаяся тем, что механизм подключения выполнен в виде электрического кабеля с разъемом на конце.
6. Автоматизированная мобильная зарядная станция по п. 1, отличающаяся тем, что мотор-колеса крепятся к установленным на раме амортизаторам.
7. Автоматизированная мобильная зарядная станция по п. 1, отличающаяся тем, что мотор-колеса установлены на поворотных механизмах, обеспечивающих их поворот на определенный угол в горизонтальной плоскости.
| US 9592742 B1, 14.03.2017 | |||
| EP 3249286 A1, 29.11.2017 | |||
| US 11413982 B2, 16.08.2022 | |||
| US 10507733 B2, 17.12.2019 | |||
| US 10183563 B2, 22.01.2019. |

