Изобретение относится к области строительства, а именно к средствам соединения арматурных стержней при помощи проволоки.
Известно устройство для вязки арматурных стержней [RU 90097 U1], содержащее фиксатор положения соединяемых стержней, направляющий канал для проволоки, устройство прижима и натяжения проволоки, режущий узел и узел скручивания проволоки.
Недостатками известного устройства для вязки арматурных стержней являются: низкая скорость работы (более 10 секунд на 1 узел); необходимость задействовать физическую силу для обвязывания; необходимость точного ручного позиционирования устройства в месте предполагаемого узла; необходимость задействовать минимум двое рабочих при работе с устройством, один из которых непосредственно управляет устройством, а второй поддерживает арматурные стержни между собой на заданном расстоянии; возможность за одну операцию произвести только одинарный узел.
Известно связывающее устройство [RU 2564184 C2], предназначенное для связывания проволоки вокруг одного или более объектов. Связывающее устройство включает канал для проволоки для направления проволоки вокруг объектов; устройство подачи проволоки для продвижения проволоки в канал для проволоки; связывающий инструмент, выполненный с возможностью удерживания двух концов проволоки относительно связывающего инструмента и поворачивания концов относительно канала для проволоки, причем проволочные концы закручиваются вокруг друг друга, заставляя таким образом проволоку связывать объекты вместе.
Недостатками известного связывающего устройства являются: необходимость точного ручного позиционирования устройства в месте предполагаемого узла; необходимость задействовать минимум двое рабочих при работе с устройством, один из которых непосредственно управляет устройством, а второй поддерживает арматурные стержни между собой на заданном расстоянии; возможность за одну операцию произвести только одинарный узел.
Наиболее близким решением, принятым за прототип, является обвязочная машина [RU 2781589 C2], которая позволяет связывать объекты обвязки, например, арматурные стержни, проволоками так, чтобы концевые участки проволок были направлены в сторону объектов обвязки. Обвязочная машина содержит кожух, выполненный с возможностью размещения проволоки; блок подачи проволоки, выполненный с возможностью подачи проволоки, размещенной в кожухе; загибающий направляющий блок, выполненный с возможностью обмотки проволоки из блока подачи проволоки в петлю вокруг объекта обвязки; и обвязочный блок, выполненный с возможностью обмотки проволоки вокруг объекта обвязки для обвязки объекта обвязки, при этом обвязочный блок содержит зажимной блок, выполненный с возможностью зажатия проволоки, причем зажимной блок содержит пару зажимных элементов. При этом один зажимной элемент на поверхности, обращенной к другому зажимному элементу, содержит выступ, который выступает в направлении к указанному другому зажимному элементу; а указанный другой зажимной элемент на поверхности, обращенной к указанному одному зажимному элементу, содержит выемку, в которую входит выступ указанного одного зажимного элемента.
Признаки прототипа, являющиеся общими с заявляемым устройством для обвязывания арматурных стержней: кожух, блок подачи проволоки; загибающий направляющий блок; обвязочный блок.
Недостатками известной обвязочной машины, принятой за прототип, являются: необходимость точного ручного позиционирования устройства в месте предполагаемого узла; необходимость задействовать минимум двое рабочих при работе с устройством, один из которых непосредственно управляет устройством, а второй поддерживает арматурные стержни между собой на заданном расстоянии; возможность за одну операцию произвести только одинарный узел.
Задачей изобретения является разработка устройства для обвязывания арматурных стержней, позволяющего: автоматически позиционировать устройство в месте предполагаемого узла; произвести за одну операцию как одинарный узел, так и двойной узел; задействовать при работе с устройством одного рабочего.
Решение этой задачи является актуальным в связи с увеличением спроса на строительство монолитных железобетонных конструкций с использованием автоматических вспомогательных инструментов, позволяющих сократить затраты на ручной труд и уменьшить время на операции обвязывания арматуры, использующейся в качестве основы монолитных железобетонных конструкций.
Поставленная задача была решена за счет того, что известное устройство для обвязывания арматурных стержней, включающее кожух, блок подачи проволоки, загибающий направляющий блок и обвязочный блок, дополнительно содержит
корпус, в котором закреплены двигатели винтовой передачи, винтовые передачи, причем двигатели винтовой передачи соединены с винтовыми передачами с возможностью вращать их в синхронном режиме, и рукоятка, выполненная с возможностью перемещать корпус устройства;
платформу, к которой с одной стороны присоединен блок перемещения платформы, выполненный с возможностью перемещения по винтовым передачам по средствам встроенных кареток, а в них гаек с резьбой, совпадающей с резьбой винтовых передач, а с другой стороны закреплены реечная передача и направляющие, с которыми соединен блок перемещения кожуха вдоль платформы, выполненный с возможностью перемещения по реечной передаче за счет встроенного двигателя, на валу которого надета шестерня, и удерживаться за счет направляющих по средствам встроенных кареток;
при этом кожух закреплен на блоке перемещения кожуха вдоль платформы и содержит катушку с проволокой, закрепленную на блоке подачи проволоки, выполненным с возможностью проталкивать проволоку от катушки с проволокой к обвязочному блоку и загибающему направляющему блоку, причем к основанию блока подачи проволоки прикреплен линейный двигатель, выполненный с возможностью перемещать блок подачи проволоки вдоль кожуха, при этом с противоположной стороны основания блока подачи проволоки прикреплен двигатель позиционирования обвязочного блока, соединенный с валом, на который надета шестерня двигателя позиционирования, выполненная с возможностью передавать крутящий момент на шестерню обвязочного блока, закрепленную на внешнем диаметре обвязочного блока, при этом обвязочный блок закреплен на валу, а сам вал прикреплен к блоку подачи проволоки, причем вал выполнен с отверстием внутри, диаметр которого больше, чем диаметр проволоки,
при этом на корпусе закреплен программируемый логический контроллер, в который встроены интеллектуальные алгоритмы машинного обучения для определения координат узлов стержней и выполненный с возможность выдавать управляющие воздействия на все двигатели устройства, блок подачи проволоки, обвязочный блок и загибающий направляющий блок, причем к программируемому логическому контроллеру подключена кнопка задания режима обвязывания, кнопка установки таймера, разъем для питания и фотокамера.
Отличительные признаки предлагаемого устройства: корпус; двигатели винтовой передачи; винтовые передачи; рукоятка; платформа; блок перемещения платформы; реечная передача; направляющие; блок перемещения кожуха вдоль платформы; катушка с проволокой; проволока; линейный двигатель; двигатель позиционирования обвязочного блока; валы; шестерня двигателя позиционирования; шестерня обвязочного блока; программируемый логический контроллер; кнопка задания режима обвязывания; кнопка установки таймера; разъем для питания, фотокамера.
Отличительные признаки в совокупности с известными позволяют автоматически позиционировать устройство в месте предполагаемого узла; произвести за одну операцию как одинарный узел, так и двойной узел; задействовать при работе с устройством одного рабочего.
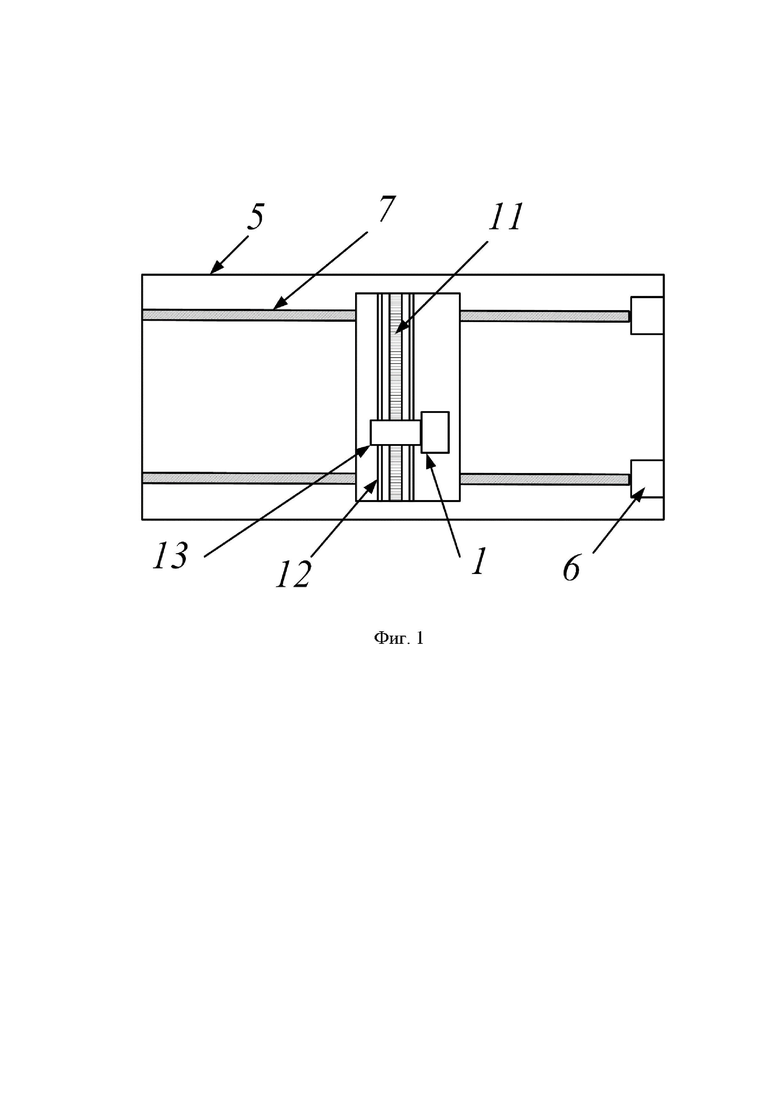
На фиг. 1 представлено устройство для обвязывания арматурных стержней (вид снизу).
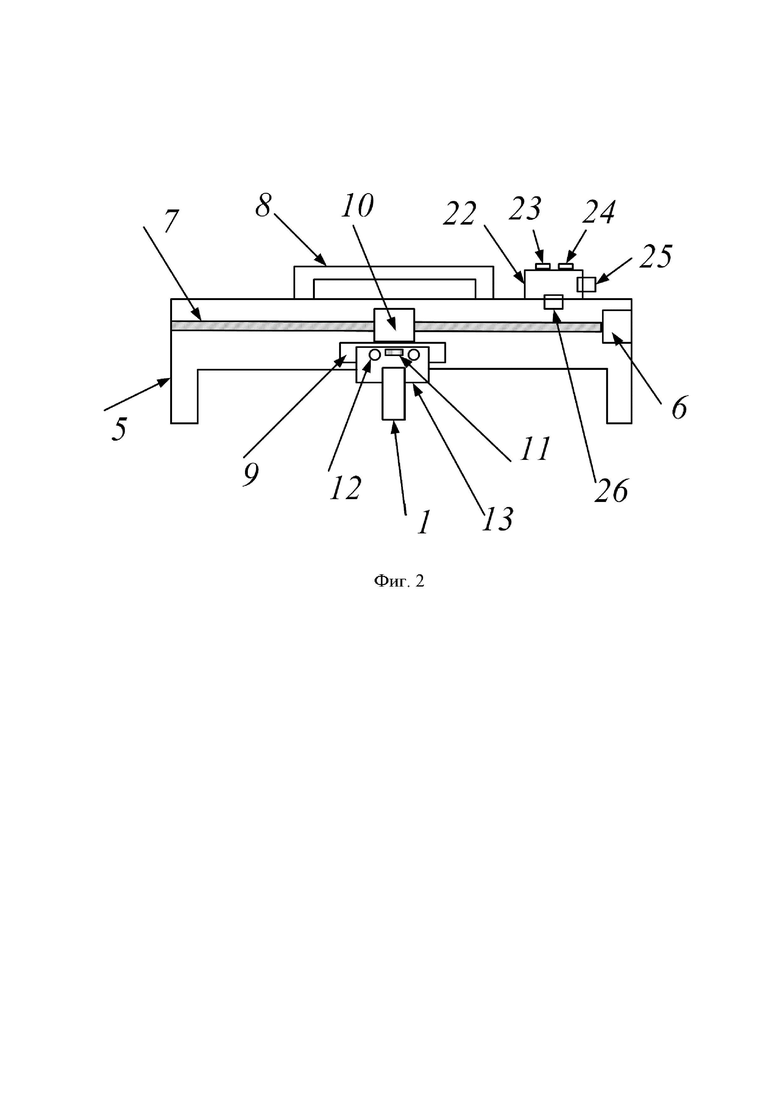
На фиг. 2 представлено устройство для обвязывания арматурных стержней (вид сбоку).
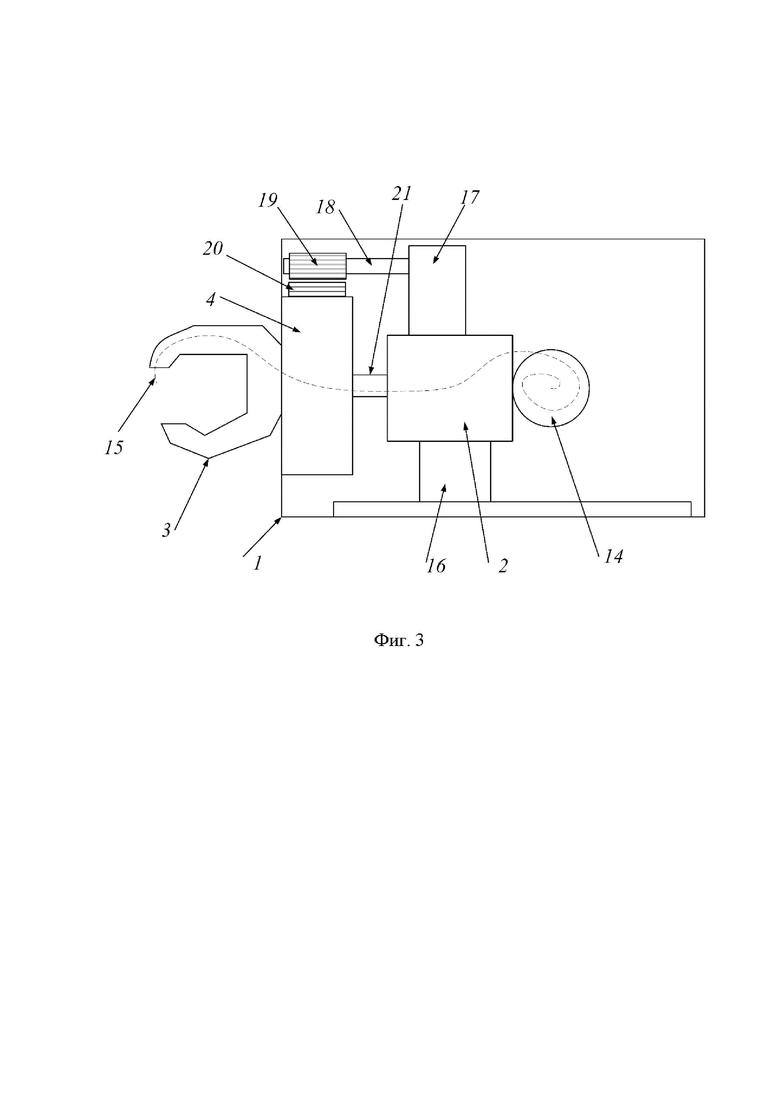
На фиг. 3 представлен кожух.
Устройство для обвязывания арматурных стержней включает кожух 1 (фиг.1), блок подачи проволоки 2, загибающий направляющий блок 3, обвязочный блок 4 (фиг.3) и корпус 5 (фиг. 1). В корпусе 5 закреплены двигатели винтовой передачи 6, винтовые передачи 7, причем двигатели винтовой передачи 6 соединены с винтовыми передачами 7 с возможностью вращать их в синхронном режиме, и рукоятка 8, выполненная с возможностью перемещать корпус 5 устройства.
Также устройство включает платформу 9 (фиг. 2), к которой с одной стороны присоединен блок перемещения платформы 10, выполненный с возможностью перемещения по винтовым передачам 7 по средствам встроенных кареток, а в них гаек с резьбой, совпадающей с резьбой винтовых передач 7, а с другой стороны закреплены реечная передача 11 и направляющие 12, с которыми соединен блок перемещения кожуха вдоль платформы 13, выполненный с возможностью перемещения по реечной передаче 11 за счет встроенного двигателя, на валу которого надета шестерня, и удерживаться за счет направляющих 12 по средствам встроенных кареток.
Кожух 1 (фиг. 3) закреплен на блоке перемещения кожуха вдоль платформы 13 и содержит катушку с проволокой 14, закрепленную на блоке подачи проволоки 2, выполненный с возможностью проталкивать проволоку 15 от катушки с проволокой 14 к обвязочному блоку 4 и загибающему направляющему блоку 3, причем к основанию блока подачи проволоки 2 прикреплен линейный двигатель 16, выполненный с возможностью перемещать блок подачи проволоки 2 вдоль кожуха 1, при этом с противоположной стороны основания блока подачи проволоки 2 прикреплен двигатель позиционирования обвязочного блока 17, соединенный с валом 18, на который надета шестерня двигателя позиционирования 19, выполненная с возможностью передавать крутящий момент на шестерню обвязочного блока 20, закрепленную на внешнем диаметре обвязочного блока 4, при этом обвязочный блок 4 закреплен на валу 21, а сам вал 21 прикреплен к блоку подачи проволоки 2, причем вал 21 выполнен с отверстием внутри, диаметр которого больше, чем диаметр проволоки 15.
При этом на корпусе 5 закреплен программируемый логический контроллер 22, в который встроены интеллектуальные алгоритмы машинного обучения для определения координат узлов стержней и выполненный с возможностью выдавать управляющие воздействия на все двигатели устройства, блок подачи проволоки 2, обвязочный блок 4 и загибающий направляющий блок 3, причем к программируемому логическому контроллеру 22 подключена кнопка задания режима обвязывания 23, кнопка установки таймера 24, разъем для питания 25, фотокамера 26.
Устройство работает следующим образом.
Вначале пользователь открывает кожух 1 и загружает внутрь него катушку с проволокой 14. Затем закрывает кожух 1 и подключает устройство к сети или к внешнему аккумулятору по средствам разъема для питания 25. После чего программирует устройство по средствам кнопок 23 и 24. С помощью кнопки 23 можно выбрать режим, в котором будет работать устройство. Всего режимов два: первый предполагает операцию обвязывания по нажатию кнопки, а второй устанавливает таймер, только по истечении которого начнется операция обвязывания. Это нужно для того, чтобы пользователю устройства успеть выставить арматурные стержни в необходимом для обвязывания положении. Также с помощью кнопок выбирается одинарный или двойной узел.
После чего пользователь подготавливает арматурные стержни для обвязывания проволокой 15. Арматурные стержни могут располагаться как в вертикальной, так и в горизонтальной плоскостях. Затем пользователь располагает устройство параллельно в той плоскости, в которой располагаются арматурные стержни, плотно прижимая устройство к ним. При этом корпус 5 устройства может быть расположен в любой точке пространства, относительно предполагаемого места обвязывания, но в пределах её покрытия корпусом 5.
После чего в работу вступают заложенные в программируемый логический котроллер 22 алгоритмы машинного обучения для определения координат узлов стержней. Они на вход получают текущее изображение всей поверхности, которая заключена под корпусом 5 устройства по средством фотокамеры 26. Затем по заранее обученным моделям машинного обучения определяются координаты предполагаемых мест с узлами стрежней, которые подлежат обвязыванию. Поскольку узлы, как правило, образуются путем перпендикулярного перекрытия стержней или с небольшими отклонениями, то моделями машинного обучения эти пересечения определяются с высокой точностью. После того, как координаты всех предполагаемых мест с узлами стрежней, которые подлежат обвязыванию, определены, в работу вступают алгоритмы расчета траекторий движений исполнительных механизмов, к которым относятся двигатели. Если узлов несколько, то устройство будет перемещаться последовательно до каждого из них.
После того, как траектории движений определены, программируемый логический контроллер 22 посылает сигналы на двигатели. Сначала в работу вступают двигатели винтовой передачи 6, которые посредством вращения передают момент вращения на винтовые передачи 7, по которым передвигается платформа 9 вдоль устройства. Затем в работу вступают двигатели блока перемещения кожуха вдоль платформы 13, которые по реечной передаче 11 перемещают кожух вдоль платформы 9. Затем в работу вступает линейный двигатель 16, который перемещает блок подачи проволоки 2, а вместе с ним и остальную закрепленную на нем часть, вглубь кожуха. Это делается для того, чтобы обеспечить возможность позиционирования загибающего направляющего блока 3 под нужным углом.
Затем происходит позиционирование загибающего направляющего блока 3 под необходимым углом при помощи работы двигателя позиционирования обвязочного блока 17. При вращении двигателя позиционирования обвязочного блока 17 происходит вращение шестерни двигателя позиционирования 19, которая зацепляет шестерню обвязочного блока 20, что приводит к смещению положения обвязочного блока 4. Поскольку к обвязочному блоку 4 прикреплен загибающий направляющий блок 3, то и он проворачивается вместе с ним на определенный угол. Данный угол рассчитывается алгоритмами в программируемом логическом контроллере 22, относительно определенных координат узлов обвязывания.
После того, как загибающий направляющий блок 3 оказался под нужным углом относительно узла обвязывания, в работу вступает линейный двигатель 16, который перемещается в противоположную сторону так, что между загибающим направляющим блоком 3 оказываются стержни арматуры. Затем в работу вступает обвязочный блок 4, по средствам которого происходит процесс обвязывания. Процесс обвязывания дублирует тот, что раскрыт в прототипе. Однако основное отличие заключается в том, что после процесса обвязывания в работу снова вступает линейный двигатель 16, который снова перемещается вглубь кожуха 1, затем загибающий направляющий блок 3 поворачивается ровно на 90 градусов, линейный двигатель 16 перемещается в противоположную сторону и процесс обвязывания повторяется. Таким образом происходит обвязка двух стрежней двойным узлом.
Затем данные операции повторяются для других определенных узлов для обвязывания. После этого работа устройства прекращается, о чем сигнализирует светодиод, встроенный в программируемый логический контроллер 22.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБВЯЗОЧНАЯ МАШИНА | 2016 |
|
RU2675829C1 |
| ОБВЯЗОЧНАЯ МАШИНА | 2016 |
|
RU2710785C2 |
| ОБВЯЗОЧНАЯ МАШИНА | 2016 |
|
RU2764843C1 |
| ОБВЯЗОЧНАЯ МАШИНА | 2019 |
|
RU2799425C2 |
| ОБВЯЗОЧНАЯ МАШИНА | 2016 |
|
RU2689560C1 |
| ОБВЯЗОЧНАЯ МАШИНА | 2016 |
|
RU2781589C2 |
| ОБВЯЗОЧНАЯ МАШИНА | 2016 |
|
RU2689108C1 |
| ОБВЯЗОЧНАЯ МАШИНА | 2021 |
|
RU2818741C2 |
| ОБВЯЗОЧНАЯ МАШИНА | 2021 |
|
RU2806762C2 |
| ОБВЯЗОЧНАЯ МАШИНА | 2021 |
|
RU2818274C2 |
Изобретение относится к области строительства, а именно к средствам соединения арматурных стержней при помощи проволоки. Технический результат - возможность автоматически позиционировать устройство в месте предполагаемого узла; произвести за одну операцию как одинарный узел, так и двойной узел; задействовать при работе с устройством одного рабочего. Устройство включает кожух, блок подачи проволоки; загибающий направляющий блок; обвязочный блок; корпус; двигатели винтовой передачи; винтовые передачи; рукоятку; платформу; блок перемещения платформы; реечную передачу; направляющие; блок перемещения кожуха вдоль платформы; катушку с проволокой; проволоку; линейный двигатель; двигатель позиционирования обвязочного блока; валы; шестерню двигателя позиционирования; шестерню обвязочного блока; программируемый логический контроллер; кнопку задания режима обвязывания; кнопку установки таймера; разъем для питания, фотокамеру. 3 ил.
Устройство для обвязывания арматурных стержней, включающее кожух, блок подачи проволоки, загибающий направляющий блок и обвязочный блок, отличающееся тем, что содержит корпус и платформу, при этом в корпусе закреплены двигатели винтовой передачи, винтовые передачи, причем двигатели винтовой передачи соединены с винтовыми передачами с возможностью вращения их в синхронном режиме, и рукоятка, выполненная с возможностью перемещения корпуса устройства, к платформе с одной стороны присоединен блок перемещения платформы, выполненный с возможностью перемещения по винтовым передачам посредством встроенных кареток, а в них гаек с резьбой, совпадающей с резьбой винтовых передач, а с другой стороны закреплены реечная передача и направляющие, с которыми соединен блок перемещения кожуха вдоль платформы, выполненный с возможностью перемещения по реечной передаче за счет встроенного двигателя, на валу которого надета шестерня, и удерживания за счет направляющих посредством встроенных кареток, при этом кожух закреплен на блоке перемещения кожуха вдоль платформы и содержит катушку с проволокой, закрепленную на блоке подачи проволоки, выполненном с возможностью проталкивания проволоки от катушки с проволокой к обвязочному блоку и загибающему направляющему блоку, причем к основанию блока подачи проволоки прикреплен линейный двигатель, выполненный с возможностью перемещения блока подачи проволоки вдоль кожуха, при этом с противоположной стороны основания блока подачи проволоки прикреплен двигатель позиционирования обвязочного блока, соединенный с валом, на который надета шестерня двигателя позиционирования, выполненная с возможностью передачи крутящего момента на шестерню обвязочного блока, закрепленную на внешнем диаметре обвязочного блока, при этом обвязочный блок закреплен на валу, а сам вал прикреплен к блоку подачи проволоки, причем вал выполнен с отверстием внутри, диаметр которого больше, чем диаметр проволоки, при этом на корпусе закреплен программируемый логический контроллер, в который встроены интеллектуальные алгоритмы машинного обучения для определения координат узлов стержней и выполненный с возможностью выдачи управляющих воздействий на все двигатели устройства, блок подачи проволоки, обвязочный блок и загибающий направляющий блок, причем к программируемому логическому контроллеру подключена кнопка задания режима обвязывания, кнопка установки таймера, разъем для питания и фотокамера.
| ОБВЯЗОЧНАЯ МАШИНА | 2016 |
|
RU2781589C2 |
| УСТРОЙСТВО ДЛЯ ОБВЯЗКИ ИЗДЕЛИЙ НА ПАЛЛЕТЕ | 2022 |
|
RU2793019C1 |
| УСТРОЙСТВО ДЛЯ СВЯЗЫВАНИЯ ПРЕДМЕТОВ | 2006 |
|
RU2429100C2 |
| US 10988946 B2, 27.04.2021 | |||
| US 5678613 A1, 21.10.1997. | |||

