Область техники, к которой относится изобретение
[0001] Настоящее раскрытие сущности относится к обвязочной машине, выполненной с возможностью обвязывать объект, такой как арматурный стержень, с помощью проволоки.
Уровень техники
[0002] Для бетонных зданий арматурные стержни используются для того, чтобы повышать прочность. Арматурные стержни обвязываются с помощью проволок таким образом, что арматурные стержни не отклоняются от предварительно определенных позиций во время укладки бетонной смеси.
[0003] В предшествующем уровне техники предлагается обвязочная машина, называемая "машиной для обвязки арматурных стержней", выполненная с возможностью наматывать два или более арматурных стержней с помощью проволоки и скручивать проволоку, намотанную на арматурные стержни, за счет этого обвязывая два или более арматурных стержней с помощью проволоки. Обвязочная машина включает в себя механизм подачи вязальной проволоки, выполненный с возможностью доставлять проволоку, намотанную на бобину, и наматывать вязальную проволоку на арматурные стержни, захватный механизм, выполненный с возможностью захватывать проволоку, намотанную на арматурные стержни, и механизм скручивания вязальной проволоки, выполненный с возможностью скручивания проволоки посредством вращательного приведения в действие захватного механизма, и механизм подачи проволоки, захватный механизм и механизм скручивания проволоки последовательно работают посредством операции нажатия курка, так что операция обвязки одного цикла выполняется.
[0004] При обвязке арматурных стержней с помощью проволоки, если обвязка ослабляется, арматурные стержни отклоняются друг от друга, так что требуется плотно поддерживать арматурные стержни. Следовательно, предлагается технология подачи проволоки, обмотанной вокруг арматурных стержней, в обратном направлении и наматывания проволоки на арматурные стержни (например, см. JP 2004-142813 А).
[0005] В обвязочной машине предшествующего уровня техники, в состоянии, в котором проволока обматывается вокруг арматурных стержней вдоль носа и нижнего направляющего рычага, проволока зацепляется посредством фиксирующего устройства и затем подается в обратном направлении.
[0006] В этом случае, проволока, обмотанная вокруг арматурных стержней, сначала перемещается в проволоке фрагмента вдоль носа к арматурным стержням. Когда проволока фрагмента вдоль носа перемещается в позицию, в которой она находится в контакте с арматурными стержнями, трение между проволокой и арматурными стержнями увеличивает нагрузку подачи проволоки в обратном направлении. По этой причине, проволока фрагмента вдоль нижнего направляющего рычага не может в достаточной степени оттягиваться таким образом, что проволока может не наматываться на арматурные стержни.
Сущность изобретения
[0007] Настоящее изобретение осуществлено для того, чтобы разрешать вышеизложенную проблему, и его цель заключается в том, чтобы предоставлять обвязочную машину, допускающую обматывание проволоки вокруг объекта.
[0008] Согласно варианту осуществления настоящего изобретения, предусмотрена обвязочная машина, которая включает в себя: блок подачи проволоки, выполненный с возможностью подачи проволоки; загибочную направляющую, выполненную с возможностью загибания проволоки, которая подается в прямом направлении посредством блока подачи проволоки; и обвязочный блок, выполненный с возможностью скручивания проволоки, подаваемой в обратном направлении посредством блока подачи проволоки и наматываемой на объект. Обвязочный блок содержит корпус для зацепления проволоки, выполненный с возможностью зацепления концевой стороны верхушки проволоки, подаваемой в прямом направлении посредством блока подачи проволоки, загибаемой посредством загибочной направляющей и наматываемой вокруг объекта. Обвязочная машина содержит натягивающий блок для натягивания, к объекту, проволоки на второй стороне, расположенной на противоположной стороне по отношению к загибочной направляющей относительно объекта, раньше проволоки на первой стороне, расположенной на загибочной направляющей проволоки, намотанной вокруг объекта и зацепленной на конце верхушки.
[0009] Согласно варианту осуществления настоящего изобретения, проволока на второй стороне, которая позиционируется на противоположной стороне по отношению к загибочной направляющей относительно объекта проволоки, намотанной вокруг объекта и зацепленной на конце верхушки, сначала натягивается к объекту, и проволока на первой стороне, расположенной на загибочной направляющей, затем натягивается к объекту.
[0010] Проволока на первой стороне, которая позиционируется на загибочной направляющей проволоки, намотанной вокруг объекта и зацепленной на конце верхушки, является менее подверженной трению, возникающему в результате пристыковывания проволоки к объекту в ходе операции подачи проволоки в обратном направлении. Следовательно, проволока может надежно наматываться на объект посредством натягивания проволоки на второй стороне, которая позиционируется на противоположной стороне по отношению к загибочной направляющей относительно объекта, к объекту, и затем натягивания проволоки на первой стороне, расположенной на загибочной направляющей, к объекту.
Краткое описание чертежей
[0011] Фиг. 1 является видом, показывающим пример полной конфигурации машины для обвязки арматурных стержней при просмотре сбоку.
Фиг. 2A является видом в перспективе, показывающим пример обвязочного блока.
Фиг. 2B является видом сверху в сечении, показывающим пример обвязочного блока.
Фиг. 2C является видом сверху в сечении, показывающим пример обвязочного блока.
Фиг. 3A является видом сбоку, показывающим пример механизма убирания направляющего элемента первого варианта осуществления.
Фиг. 3B является видом снизу в сечении, показывающим пример операций механизма убирания направляющего элемента первого варианта осуществления.
Фиг. 3C является видом снизу в сечении, показывающим пример операций механизма убирания направляющего элемента первого варианта осуществления.
Фиг. 3D является видом спереди в сечении, показывающим пример операций механизма убирания направляющего элемента первого варианта осуществления.
Фиг. 3E является видом спереди в сечении, показывающим пример операций механизма убирания направляющего элемента первого варианта осуществления.
Фиг. 4 является блок-схемой, показывающей пример функции управления машины для обвязки арматурных стержней.
Фиг. 5A иллюстрирует пример операции обвязки арматурных стержней посредством машины для обвязки арматурных стержней.
Фиг. 5B иллюстрирует пример операции обвязки арматурных стержней посредством машины для обвязки арматурных стержней.
Фиг. 5C иллюстрирует пример операции обвязки арматурных стержней посредством машины для обвязки арматурных стержней.
Фиг. 5D иллюстрирует пример операции обвязки арматурных стержней посредством машины для обвязки арматурных стержней.
Фиг. 5E иллюстрирует пример операции обвязки арматурных стержней посредством машины для обвязки арматурных стержней.
Фиг. 5F иллюстрирует пример операции обвязки арматурных стержней посредством машины для обвязки арматурных стержней.
Фиг. 6A является видом сбоку, показывающим пример механизма убирания направляющего элемента второго варианта осуществления.
Фиг. 6B является видом снизу в сечении, показывающим пример операций механизма убирания направляющего элемента второго варианта осуществления.
Фиг. 6C является видом снизу в сечении, показывающим пример операций механизма убирания направляющего элемента второго варианта осуществления.
Фиг. 6D является видом спереди в сечении, показывающим пример операций механизма убирания направляющего элемента второго варианта осуществления.
Фиг. 6E является видом спереди в сечении, показывающим пример операций механизма убирания направляющего элемента второго варианта осуществления.
Фиг. 7A является видом сбоку, показывающим пример механизма убирания направляющего элемента третьего варианта осуществления.
Фиг. 7B является видом снизу в сечении, показывающим пример операций механизма убирания направляющего элемента третьего варианта осуществления.
Фиг. 7C является видом спереди в сечении, показывающим пример операций механизма убирания направляющего элемента третьего варианта осуществления.
Фиг. 7D является видом спереди в сечении, показывающим пример операций механизма убирания направляющего элемента третьего варианта осуществления.
Фиг. 7E является видом спереди в сечении, показывающим пример операций механизма убирания направляющего элемента третьего варианта осуществления.
Фиг. 7F является видом спереди в сечении, показывающим пример операций механизма убирания направляющего элемента третьего варианта осуществления.
Фиг. 8A является видом сбоку, показывающим пример направляющего элемента другого модифицированного варианта осуществления.
Фиг. 8B является видом спереди в сечении, показывающим пример операций направляющего элемента другого модифицированного варианта осуществления.
Фиг. 9 является видом сбоку основных частей, показывающим модифицированный вариант осуществления обвязочной машины.
Фиг. 10 является видом сбоку основных частей, показывающим другой модифицированный вариант осуществления обвязочной машины.
Подробное описание вариантов осуществления
[0012] В дальнейшем в данном документе описывается пример машины для обвязки арматурных стержней, которая представляет собой вариант осуществления обвязочной машины настоящего изобретения, со ссылкой на чертежи.
[0013] Пример конфигурации машины для обвязки арматурных стержней
Фиг. 1 является видом, показывающим пример полной конфигурации машины для обвязки арматурных стержней при просмотре сбоку. Машина 1A для обвязки арматурных стержней имеет такую форму, которую оператор захватывает рукой, и включает в себя часть 10A основного корпуса и часть 11A рукоятки.
[0014] Машина 1A для обвязки арматурных стержней выполнена с возможностью подачи проволоки W в прямом направлении, обозначаемом с помощью стрелки F, наматывания проволоки вокруг арматурных стержней S, которые представляют собой подлежащий обвязке объект для того, чтобы подавать проволоку W, намотанную вокруг арматурных стержней S, в обратном направлении, обозначаемом с помощью стрелки R, наматывания проволоки на арматурные стержни S и скручивания проволоки W, тем самым обвязывая арматурные стержни S с помощью проволоки W.
[0015] Чтобы реализовывать вышеуказанные функции, машина 1A для обвязки арматурных стержней включает в себя магазин 2A, в котором размещается проволока W, и блок 3A подачи проволоки, выполненный с возможностью подачи проволоки W. Машина 1A для обвязки арматурных стержней также включает в себя блок 5A формирования загиба, выполненный с возможностью формировать путь, по которому проволока W, подаваемая посредством блока 3A подачи проволоки, должна обматываться вокруг арматурных стержней S, и режущий блок 6A, выполненный с возможностью отрезать проволоку W, намотанную на арматурные стержни S. Машина 1A для обвязки арматурных стержней также включает в себя обвязочный блок 7A, выполненный с возможностью скручивания проволоки W, намотанной на арматурные стержни S, и блок 8A привода, выполненный с возможностью приводить в действие обвязочный блок 7A.
[0016] В магазине 2A, с возможностью вращения и съемно размещается бобина 20, на которой длинная проволока W наматывается с возможностью сматываться. В качестве проволоки W, используется проволока, изготовленная из пластически деформированной металлической проволоки, проволока, имеющая металлическую проволоку, покрытую смолой, скрученная проволока и т.п. Бобина 20 имеет такую конфигурацию, в которой одна или более проволок W наматываются на часть ступицы (не показана) и могут сматываться с бобины 20 одновременно.
[0017] Блок 3A подачи проволоки включает в себя пару подающих шестерней 30, выполненных с возможностью размещать посередине и подавать одну или более проволок W с параллельным совмещением. В блоке 3A подачи проволоки, операция вращения подающего электромотора (не показан) передается для того, чтобы вращать подающие шестерни 30. В силу этого, блок 3A подачи проволоки подает проволоку W, размещенную посередине между парой подающих шестерней 30, вдоль направления протягивания проволоки W. В конфигурации, в которой множество, например, две проволоки W подаются, две проволоки W подаются с параллельным совмещением.
[0018] Блок 3A подачи проволоки имеет такую конфигурацию, в которой направления вращения подающих шестерней 30 переключаются, и направление подачи проволоки W переключается между прямым и обратным направлениями посредством переключения направления вращения подающего электромотора (не показан) между прямым и обратным направлениями.
[0019] Блок 5A формирования загиба включает в себя загибочную направляющую 50, которая представляет собой пример первой направляющей части, выполненной с возможностью загибания проволоки W, которая подается посредством блока 30 подачи проволоки, и индукционную направляющую 51, которая представляет собой пример второй направляющей части, выполненной с возможностью направления проволоки W, загибаемой посредством загибочной направляющей 50, к обвязочному блоку 7A. В машине 1A для обвязки арматурных стержней, путь проволоки W, которая подается посредством блока 3A подачи проволоки, регулируется посредством блока 5A формирования загиба таким образом, что местоположение проволоки W становится контуром Ru, как показано с помощью пунктирной линии на фиг. 1, и проволока W в силу этого наматывается вокруг арматурных стержней S.
[0020] Блок 5A формирования загиба имеет направляющие элементы 53 и 53b, выполненные с возможностью направления проволоки W, которая подается в прямом направлении, и загибать проволоку W. Направляющий элемент 53 составляет натягивающий блок для натягивания проволоки W из предварительно определенной стороны, совместно с блоком 3A подачи проволоки. Направляющий элемент 53 предоставляется на стороне загибочной направляющей 50, на которой вводится проволока W, подаваемая посредством блока 3A подачи проволоки, и размещается на радиально внутренней стороне контура Ru, который формируется посредством проволоки W. Направляющий элемент 53 выполнен с возможностью регулировать проволоку W таким образом, что проволока W не входит в радиально внутреннюю сторону контура Ru.
[0021] Направляющий элемент 53b предоставляется на стороне загибочной направляющей 50, на которой выпускается проволока W, подаваемая посредством блока 3A подачи проволоки, и размещается на радиально внешней стороне контура Ru, который формируется посредством проволоки W.
[0022] Блок 5A формирования загиба включает в себя подвижный механизм 54A направляющего элемента, выполненный с возможностью убирать направляющий элемент 53. Подвижный механизм 54A направляющего элемента составляет натягивающий блок для натягивания проволоки W из предварительно определенной стороны, совместно с блоком 3A подачи проволоки, и выполнен с возможностью убирать направляющий элемент 53 в комбинации с операцией обвязочного блока 7A после того, как проволока W наматывается на арматурные стержни S.
[0023] Режущий блок 6A включает в себя часть 60 с неподвижным лезвием, часть 61 с подвижным лезвием, выполненную с возможностью отрезать проволоку W совместно с частью 60 с неподвижным лезвием, и трансмиссионный механизм 62, выполненный с возможностью передавать операцию обвязочного блока 7A в часть 61 с подвижным лезвием. Режущий блок 6A выполнен с возможностью отрезать проволоку W посредством операции вращения части 61 с подвижным лезвием вокруг части 60 с неподвижным лезвием, которая представляет собой опорную точку. Трансмиссионный механизм 62 выполнен с возможностью передавать операцию обвязочного блока 7A в часть 61 с подвижным лезвием через подвижный элемент 83 и вращать часть 61 с подвижным лезвием в комбинации с операцией обвязочного блока 7A, за счет этого отрезая проволоку W.
[0024] Обвязочный блок 7A включает в себя корпус 70 для зацепления проволоки, с которым зацепляется проволока W. Ниже описывается подробный вариант осуществления обвязочного блока 7A. Блок 8A привода включает в себя электромотор 80 и редуктор 81, выполненный с возможностью выполнять замедление и усиление крутящего момента.
[0025] Машина 1A для обвязки арматурных стержней включает в себя часть 90 регулирования подачи, к которой пристыкуется конец верхушки проволоки W, на пути подачи проволоки W, которая зацепляется посредством корпуса 70 для зацепления проволоки. В машине 1A для обвязки арматурных стержней, загибочная направляющая 50 и индукционная направляющая 51 блока 5A формирования загиба предоставляются в концевом фрагменте на передней стороне части 10A основного корпуса. В машине 1A для обвязки арматурных стержней, стыкующаяся часть 91, к которой должны пристыковаться арматурные стержни S, предоставляется в концевом фрагменте на передней стороне части 10A основного корпуса и между загибочной направляющей 50 и индукционной направляющей 51.
[0026] В машине 1A для обвязки арматурных стержней, часть 11A рукоятки протягивается вниз из части 10A основного корпуса. Кроме того, аккумулятор 15A съемно монтируется на нижней части в части 11A рукоятки. Кроме того, магазин 2A машины 1A для обвязки арматурных стержней предоставляется перед частью 11A рукоятки. В части 10A основного корпуса машины 1A для обвязки арматурных стержней, размещаются блок 3A подачи проволоки, режущий блок 6A, обвязочный блок 7A, блок 8A привода, выполненный с возможностью приводить в действие обвязочный блок 7A, и т.п.
[0027] Курок 12A предоставляется на передней стороне части 11A рукоятки машины 1A для обвязки арматурных стержней, и переключатель 13A предоставляется в части 11A рукоятки. Помимо этого, часть 10A основного корпуса содержит подложку 100, на которой монтируется электрическая схема, составляющая блок управления.
[0028] Фиг. 2A является видом в перспективе, показывающим пример обвязочного блока, и фиг. 2B и 2C являются видами сверху в сечении, показывающими пример обвязочного блока. Ниже описывается конфигурация обвязочного блока со ссылкой на каждый чертеж.
[0029] Обвязочный блок 7A включает в себя корпус 70 для зацепления проволоки, с которым должна зацепляться проволока W, и вращательный вал 72 для приведения в действие корпуса 70 для зацепления проволоки. Обвязочный блок 7A и блок 8A привода имеют такую конфигурацию, в которой вращательный вал 72 и электромотор 80 соединяются между собой через редуктор 81, и вращательный вал 72 приводится в действие через редуктор 81 посредством электромотора 80.
[0030] Корпус 70 для зацепления проволоки имеет центральный крючок 70C, соединенный с вращательным валом 72, первый боковой крючок 70R и второй боковой крючок 70L, выполненные с возможностью открываться и закрываться относительно центрального крючка 70C, и втулку 71, выполненную с возможностью приводить в действие первый боковой крючок 70R и второй боковой крючок 70L и формировать проволоку W с требуемой формой.
[0031] В обвязочном блоке 7A, сторона, на которой предоставляются центральный крючок 70C, первый боковой крючок 70R и второй боковой крючок 70L, называется "передней стороной", и сторона, на которой вращательный вал 72 соединяется с редуктором 81, называется "задней стороной".
[0032] Центральный крючок 70C соединяется с передним концом вращательного вала 72, который представляет собой концевой фрагмент, через конфигурацию, которая может вращаться относительно вращательного вала 72 и перемещаться как единое целое с вращательным валом 72 в осевом направлении.
[0033] Концевая сторона верхушки первого бокового крючка 70R, которая представляет собой один концевой фрагмент в осевом направлении вращательного вала 72, позиционируется в одной боковой части относительно центрального крючка 70C. Задняя концевая сторона первого бокового крючка 70R, которая представляет собой концевой фрагмент на другой стороне в осевом направлении вращательного вала 72, поддерживается с возможностью вращения на центральном крючке 70C посредством вала 71b.
[0034] Концевая сторона верхушки второго бокового крючка 70L, которая представляет собой один концевой фрагмент в осевом направлении вращательного вала 72, позиционируется в другой боковой части относительно центрального крючка 70C. Задняя концевая сторона второго бокового крючка 70L, которая представляет собой концевой фрагмент на другой стороне в осевом направлении вращательного вала 72, поддерживается с возможностью вращения на центральном крючке 70C посредством вала 71b.
[0035] В силу этого, корпус 70 для зацепления проволоки открывается/закрывается в направлениях, в которых концевая сторона верхушки первого бокового крючка 70R отделяется и контактирует относительно центрального крючка 70C, посредством операции вращения вокруг вала 71b в качестве опорной точки. Корпус 70 для зацепления проволоки также открывается/закрывается в направлениях, в которых концевая сторона верхушки второго бокового крючка 70L отделяется и контактирует относительно центрального крючка 70C.
[0036] Задний конец вращательного вала 72, который представляет собой другой концевой фрагмент, соединяется с редуктором 81 через соединительный фрагмент 72b, имеющий конфигурацию, которая может заставлять соединительный фрагмент вращаться как единое целое с редуктором 81 и перемещаться в осевом направлении относительно редуктора 81. Соединительный фрагмент 72b имеет пружину 72c для поджимания назад вращательного вала 72 к редуктору 81. Таким образом, вращательный вал 72 выполнен с возможностью быть подвижным вперед в направлении от редуктора 81 принимая на себя силу, отталкиваемую посредством пружины 72c.
[0037] Втулка 71 поддерживается таким образом, что она является вращающейся и аксиально скользящей посредством опорной рамы 76. Опорная рама 76 представляет собой кольцевой элемент и присоединяется к части 10A основного корпуса в форме, в которой она не может вращаться по окружности и перемещаться аксиально.
[0038] Втулка 71 имеет выпуклый фрагмент (не показан), выступающий из внутренней периферийной поверхности пространства, в которое вставляется вращательный вал 72, и выпуклый фрагмент входит в фрагмент паза подающего винта 72a, сформированный вдоль осевого направления на внешней периферии вращательного вала 72. Когда вращательный вал 72 вращается, втулка 71 перемещается в направлении вперед и назад вдоль осевого направления вращательного вала 72 согласно направлению вращения вращательного вала 72 под действием выпуклого фрагмента (не показан) и подающего винта 72a вращательного вала 72. Втулка 71 также вращается как единое целое с вращательным валом 72.
[0039] Втулка 71 имеет штифт 71a для регулирования открытия/закрытия, выполненный с возможностью открывать/закрывать первый боковой крючок 70R и второй боковой крючок 70L.
[0040] Штифт 71a для регулирования открытия/закрытия вставляется в направляющие отверстия 73 для регулирования открытия/закрытия, сформированные в первом боковом крючке 70R и втором боковом крючке 70L. Направляющее отверстие 73 для регулирования открытия/закрытия имеет форму протягивания в направлении перемещения втулки 71 и преобразования прямолинейного движения штифта 71a для регулирования открытия/закрытия, выполненного с возможностью перемещаться в комбинации с втулкой 71, в операцию открытия/закрытия посредством вращения первого бокового крючка 70R и второго бокового крючка 70L вокруг вала 71b в качестве опорной точки.
[0041] Корпус 70 для зацепления проволоки имеет такую конфигурацию, в которой когда втулка 71 перемещается назад (см. стрелку A2), первый боковой крючок 70R и второй боковой крючок 70L перемещаются в направлении от центрального крючка 70C посредством операций вращения вокруг вала 71b в качестве опорной точки вследствие местоположения штифта 71a для регулирования открытия/закрытия и формы направляющих отверстий 73 для регулирования открытия/закрытия.
[0042] В силу этого, первый боковой крючок 70R и второй боковой крючок 70L являются открытыми относительно центрального крючка 70C таким образом, что путь подачи, через который должна проходить проволока W, формируется между первым боковым крючком 70R и центральным крючком 70C и между вторым боковым крючком 70L и центральным крючком 70C.
[0043] В состоянии, в котором первый боковой крючок 70R и второй боковой крючок 70L являются открытыми относительно центрального крючка 70C, проволока W, которая подается посредством блока 3A подачи проволоки, проходит между центральным крючком 70C и первым боковым крючком 70R. Проволока W, проходящая между центральным крючком 70C и первым боковым крючком 70R, направляется в блок 5A формирования загиба. После этого проволока, загибаемая посредством блока 5A формирования загиба и направляемая в обвязочный блок 7A, проходит между центральным крючком 70C и вторым боковым крючком 70L.
[0044] Корпус 70 для зацепления проволоки имеет такую конфигурацию, в которой когда втулка 71 перемещается в прямом направлении, обозначаемом с помощью стрелки A1, первый боковой крючок 70R и второй боковой крючок 70L перемещаются к центральному крючку 70C посредством операций вращения вокруг вала 76 в качестве опорной точки вследствие местоположения штифта 71a для регулирования открытия/закрытия и формы направляющих отверстий 73 для регулирования открытия/закрытия. В силу этого, первый боковой крючок 70R и второй боковой крючок 70L закрываются относительно центрального крючка 70C.
[0045] Когда первый боковой крючок 70R закрывается относительно центрального крючка 70C, проволока W, размещенная посередине между первым боковым крючком 70R и центральным крючком 70C, зацепляется в таком аспекте, что проволока может перемещаться между первым боковым крючком 70R и центральным крючком 70C. Кроме того, когда второй боковой крючок 70L закрывается относительно центрального крючка 70C, проволока W, размещенная посередине между вторым боковым крючком 70L и центральным крючком 70C, зацепляется в таком аспекте, что проволока не может отрываться из-за второго бокового крючка 70L и центрального крючка 70C.
[0046] Втулка 71 имеет изгибающий фрагмент 71c1, выполненный с возможностью подталкивать и изгибать концевую сторону верхушки (один концевой фрагмент) проволоки W в предварительно определенном направлении для того, чтобы формировать проволоку W с предварительно определенной формой, и изгибающий фрагмент 71c2, выполненный с возможностью подталкивать и изгибать концевую сторону наконечника (другой концевой фрагмент) проволоки W, отрезанной посредством режущего блока 6A, в предварительно определенном направлении для того, чтобы формировать проволоку W с предварительно определенной формой.
[0047] Втулка 71 перемещается в прямом направлении, обозначаемом с помощью стрелки A1, так что концевая сторона верхушки проволоки W, зацепленной посредством центрального крючка 70C и второго бокового крючка 70L, подталкивается и изгибается к арматурным стержням S посредством изгибающего фрагмента 71c1. Кроме того, втулка 71 перемещается в прямом направлении, обозначаемом с помощью стрелки A1, так что концевая сторона наконечника проволоки W, зацепленной посредством центрального крючка 70C и первого бокового крючка 70R и отрезанной посредством режущего блока 6A, подталкивается и изгибается к арматурным стержням S посредством изгибающего фрагмента 71c2.
[0048] Обвязочный блок 7A включает в себя часть 74 регулирования вращения, выполненную с возможностью регулировать вращения корпуса 70 для зацепления проволоки и втулки 71 в комбинации с операцией вращения вращательного вала 72. Часть 74 регулирования вращения имеет лезвие 74a для регулирования вращения, выполненное во втулке 71, и зубец 74b для регулирования вращения, выполненный в части 10A основного корпуса.
[0049] Лезвие 74a для регулирования вращения состоит из множества выпуклых фрагментов, выступающих диаметрально из внешней периферии втулки 71 и предоставляемых с предварительно определенными интервалами в периферийном направлении втулки 71. Лезвие 74a для регулирования вращения крепится к втулке 71 и перемещается и вращается как единое целое с втулкой 71.
[0050] Зубец 74b для регулирования вращения имеет первый фрагмент 74b1 с зубцом и второй фрагмент 74b2 с зубцом, в качестве пары фрагментов с зубцом, обращенных друг к другу с интервалом, через который может проходить лезвие 74a для регулирования вращения. Первый фрагмент 74b1 с зубцом и второй фрагмент 74b2 с зубцом выполнены с возможностью быть втягивающимися из местоположения лезвия 74a для регулирования вращения за счет подталкивания посредством лезвия 74a для регулирования вращения согласно направлению вращения лезвия 74a для регулирования вращения.
[0051] Когда лезвие 74a для регулирования вращения части 74 регулирования вращения зацепляется с зубцом 74b для регулирования вращения, вращение втулки 71 вместе с вращением вращательного вала 72 регулируется таким образом, что втулка 71 перемещается в направлении вперед и назад посредством операции вращения вращательного вала 72. Кроме того, когда лезвие 74a для регулирования вращения расцепляется от зубца 74b для регулирования вращения, втулка 71 вращается вместе с вращением вращательного вала 72.
[0052] Фиг. 3A является видом сбоку, показывающим пример подвижного механизма направляющего элемента первого варианта осуществления, фиг. 3B и 3C являются видами снизу в сечении, показывающие пример операции подвижного механизма направляющего элемента первого варианта осуществления, и фиг. 3D и 3E являются видами спереди в сечении показывающие пример операции подвижного механизма направляющего элемента первого варианта осуществления. Ниже, пример подвижного механизма направляющего элемента первого варианта осуществления описывается со ссылкой на каждый чертеж. Следует отметить, что фиг. 3B и 3C являются видами в сечении вдоль линии A-A по фиг. 3A, и фиг. 3D и 3E являются видами в сечении вдоль линии B-B по фиг. 3A.
[0053] Подвижный механизм 54A направляющего элемента первого варианта осуществления имеет опорную часть 55A направляющего элемента, в которую направляющий элемент 53 присоединяется и приводящая часть 56A направляющего элемента, выполненная с возможностью приводить в действие опорную часть 55A направляющего элемента.
[0054] Опорная часть 55A направляющего элемента имеет форму протягивания в осевом направлении вращательного вала 72, показанного на фиг. 2B, 2C и т.п., и предоставляла направляющий элемент 53 на одном концевом фрагменте. Направляющий элемент 53 имеет, в настоящем примере, цилиндрический штифт и выступает поперечно из опорной части 55A направляющего элемента. Фрагмент опорной части 55A направляющего элемента между стороной одного концевого фрагмента и стороной другого концевого фрагмента поддерживается с возможностью вращения посредством вала 55G. Осевое направление, в котором протягивается вал 55G, представляет собой направление вверх и вниз, ортогональное направлению протягивания направляющего элемента 53. Опорная часть 55A направляющего элемента предоставляется на стороне другого концевого фрагмента с подлежащим управлению фрагментом 55H для регулирования операции вращения вокруг вала 55G в качестве опорной точки и прекращения регулирования посредством подталкивания посредством приводящей части 56A направляющего элемента.
[0055] Направляющий элемент 53 выполнен с возможностью перемещаться между направляющей позицией, в которой он выступает к пути подачи проволоки W загибочной направляющей 50 и загибает проволоку W, и убранной позицией, в которой он убирается поперечно из пути подачи проволоки W загибочной направляющей 50 посредством операции вращения опорной части 55A направляющего элемента вокруг вала 55G в качестве опорной точки.
[0056] Приводящая часть 56A направляющего элемента имеет форму протягивания в осевом направлении вращательного вала 72 и поддерживается посредством направляющего выпуклого фрагмента 56F таким образом, что фрагмент между стороной одного концевого фрагмента и стороной другого концевого фрагмента может перемещаться вдоль направления перемещения втулки 71, которое представляет собой осевое направление вращательного вала 72. Приводящая часть 56A направляющего элемента выполнена с возможностью перемещаться в направлении вперед и назад, которое представляет собой осевое направление вращательного вала 72, в комбинации с втулкой 71, выполненной с возможностью перемещаться посредством вращения вращательного вала 72. Приводящая часть 56A направляющего элемента также предоставляется на стороне одного концевого фрагмента с рабочим фрагментом 56H для подталкивания подлежащего управлению фрагмента 55H опорной части 55A направляющего элемента. Приводящая часть 56A направляющего элемента также предоставляется на стороне другого концевого фрагмента с зацепляющим фрагментом 56G для зацепления с втулкой 71.
[0057] Подвижный механизм 54A направляющего элемента имеет пружину 57A для поджимания опорной части 55A направляющего элемента в направлении, в котором направляющий элемент 53 перемещается в убранную позицию.
[0058] Как показано на фиг. 3B, подвижный механизм 54A направляющего элемента имеет такую конфигурацию, в которой когда приводящая часть 56A направляющего элемента перемещается в позицию, в которой рабочий фрагмент 56H приводящей части 56A направляющего элемента подталкивает подлежащий управлению фрагмент 55H опорной части 55A направляющего элемента, вращение опорной части 55A направляющего элемента вокруг вала 55G в качестве опорной точки регулируется. В силу этого, как показано на фиг. 3B и 3D, направляющий элемент 53 перемещается в направляющую позицию.
[0059] Напротив, как показано на фиг. 3C, подвижный механизм 54A направляющего элемента имеет такую конфигурацию, в которой когда приводящая часть 56A направляющего элемента перемещается в позицию, в которой рабочий фрагмент 56H приводящей части 56A направляющего элемента отделяется от подлежащего управлению фрагмента 55H опорной части 55A направляющего элемента, регулирование относительно вращения опорной части 55A направляющего элемента вокруг вала 55G в качестве опорной точки прекращается. В силу этого, как показано на фиг. 3C и 3E, опорная часть 55A направляющего элемента поджимается и вращается посредством пружины 57A таким образом, что направляющий элемент 53 перемещается из направляющей позиции в убранную позицию.
[0060] Далее описывается взаимная блокировка операции втулки 71 и операций первого бокового крючка 70R и второго бокового крючка 70L и направляющего элемента 53 и части 61 с подвижным лезвием.
[0061] В рабочей области, в которой втулка 71 перемещается в направлении вперед и назад вдоль осевого направления вращательного вала 72 без вращения, первый боковой крючок 70R и второй боковой крючок 70L открываются и закрываются в комбинации с перемещением втулки 71. Помимо этого, направляющий элемент 53 перемещается между направляющей позицией и убранной позицией проволоки W. Дополнительно, часть 61 с подвижным лезвием перемещается между убранной позицией и позицией резки.
[0062] В рабочей области, в которой втулка 71 перемещается в направлении вперед и назад вдоль осевого направления вращательного вала 82 без вращения, рабочая область, в которой первый боковой крючок 70R и второй боковой крючок 70L открываются и закрываются, называется "первой рабочей областью". Помимо этого, рабочая область, в которой направляющий элемент 53 перемещается между направляющей позицией и убранной позицией проволоки W, называется "второй рабочей областью". Дополнительно, рабочая область, в которой часть 61 с подвижным лезвием перемещается между убранной позицией и позицией резки, называется "третьей рабочей областью".
[0063] Когда втулка 71 перемещается из позиции начальной точки первой рабочей области к позиции конечной точки первой рабочей области, первый боковой крючок 70R закрывается относительно центрального крючка 70C, и второй боковой крючок 70L закрывается относительно центрального крючка 70C, как показано на фиг. 2C.
[0064] В то время, когда втулка 71 перемещается в первой рабочей области, приводящая часть 56A направляющего элемента перемещается в позицию, в которой рабочий фрагмент 56H приводящей части 56A направляющего элемента подталкивает подлежащий управлению фрагмент 55H опорной части 55A направляющего элемента, как показано на фиг. 3B. В силу этого, вращение опорной части 55A направляющего элемента вокруг вала 55G в качестве опорной точки регулируется, и направляющий элемент 53 перемещается в направляющую позицию, как показано на фиг. 3B и 3D.
[0065] Помимо этого, когда втулка 71 перемещается из позиции начальной точки второй рабочей области, которая представляет собой позицию конечной точки первой рабочей области, к позиции конечной точки второй рабочей области, приводящая часть 56A направляющего элемента перемещается в позицию, в которой рабочий фрагмент 56H приводящей части 56A направляющего элемента отделяется от подлежащего управлению фрагмента 55H опорной части 55A направляющего элемента, и регулирование относительно вращения опорной части 55A направляющего элемента вокруг вала 55G в качестве опорной точки прекращается, как показано на фиг. 3C. В силу этого, как показано на фиг. 3C и 3E, опорная часть 55A направляющего элемента поджимается и вращается посредством пружины 57A, и направляющий элемент 53 перемещается из направляющей позиции в убранную позицию.
[0066] Следовательно, когда втулка 71 перемещается в позицию конечной точки первой рабочей области, проволока W зацепляется посредством корпуса 70 для зацепления проволоки. Помимо этого, когда втулка 71 перемещается в позицию конечной точки второй рабочей области, направляющий элемент 53 перемещается из направляющей позиции в убранную позицию проволоки W. Дополнительно, когда втулка 71 перемещается в позицию конечной точки третьей рабочей области, часть 61 с подвижным лезвием перемещается из убранной позиции в позицию резки.
[0067] Когда втулка 71 перемещается в позицию конечной точки третьей рабочей области, зацепление лезвия 74a для регулирования вращения с зубцом 74b для регулирования вращения прекращается. Когда зацепление лезвия 74a для регулирования вращения с зубцом 74b для регулирования вращения прекращается, втулка 71 вращается в комбинации с вращением вращательного вала 72. Центральный крючок 70C, первый боковой крючок 70R и второй боковой крючок 70 корпуса 70 для зацепления проволоки, зацепляющего проволоку W, вращаются в комбинации с вращением втулки 71.
[0068] Фиг. 4 является блок-схемой, показывающей пример функции управления машины для обвязки арматурных стержней. В машине 1A для обвязки арматурных стержней, блок 14A управления выполнен с возможностью управлять электромотором 80 и подающим электромотором 31, выполненным с возможностью приводить в действие подающие шестерни 30, согласно состоянию переключателя 13A, который подталкивается посредством нажатия курка 12A, показанного на фиг. 1. Блок 14A управления выполнен с возможностью управлять позицией втулки 71 посредством управления величиной вращения электромотора 80. Блок 14A управления также выполнен с возможностью управлять прямым и обратным вращениями подающего электромотора 31.
[0069] Блок 14A управления выполнен с возможностью зацеплять проволоку W с корпусом 70 для зацепления проволоки посредством управления величиной вращения электромотора 80, в ходе операции перемещения втулки 71 в позицию конечной точки первой рабочей области. Блок 14A управления также выполнен с возможностью перемещения направляющего элемента 53 из направляющей позиции в убранную позицию в ходе операции перемещения втулки 71 в позицию конечной точки второй рабочей области. Блок 14A управления также выполнен с возможностью отрезать проволоку W в ходе операции перемещения втулки 71 в позицию конечной точки третьей рабочей области.
[0070] После зацепления проволоки W с корпусом 70 для зацепления проволоки, блок 14A управления связывает операцию перемещения направляющего элемента 53 из направляющей позиции в убранную позицию проволоки W с операцией обращения направления подающего электромотора 31, чтобы подавать проволоку W в обратном направлении, за счет этого наматывая проволоку W на арматурные стержни S.
[0071] Пример работы машины для обвязки арматурных стержней
Фиг. 5A-5F показывают пример операции обвязки арматурных стержней посредством машины для обвязки арматурных стержней. Далее описывается операция обвязки арматурных стержней S с помощью проволоки W посредством машины 1A для обвязки арматурных стержней со ссылкой на соответствующие чертежи.
[0072] Машина 1C для обвязки арматурных стержней находится в состоянии готовности, в котором проволока W размещается посередине между парой подающих шестерней 30, и конец верхушки проволоки W позиционируется между размещаемой позицией посредством подающих шестерней 30 и частью 60 с неподвижным лезвием режущего блока 6A. Кроме того, как показано на фиг. 2A и 2B, когда машина 1A для обвязки арматурных стержней находится в состоянии готовности, первый боковой крючок 70R открывается относительно центрального крючка 70C, и второй боковой крючок 70L открывается относительно центрального крючка 70C.
[0073] Когда арматурные стержни S вставляются между загибочной направляющей 50 и индукционной направляющей 51A блока 5A формирования загиба, и курок 12A нажимается, блок 14A управления приводит в действие подающий электромотор 31 в направлении прямого вращения, за счет этого подавая проволоку W в прямом направлении, обозначаемом с помощью стрелки F, посредством блока 3A подачи проволоки.
[0074] В конфигурации, в которой множество, например, две проволоки W подаются, две проволоки W подаются с параллельным совмещением вдоль осевого направления контура Ru, который формируется посредством проволок W, посредством направляющей для проволок (не показана).
[0075] Проволока W, подаваемая в прямом направлении, проходит между центральным крючком 70C и первым боковым крючком 70R и затем подается в загибочную направляющую 50 блока 5A формирования загиба. Проволока W проходит через загибочную направляющую 50 таким образом, что она загибается с возможностью обматывания вокруг арматурных стержней S.
[0076] Проволока W, загибаемая посредством загибочной направляющей 50, направляется в индукционную направляющую 51 и дополнительно подается в прямом направлении посредством блока 3A подачи проволоки, как показано на фиг. 5A таким образом, что проволока направляется между центральным крючком 70C и вторым боковым крючком 70L посредством индукционной направляющей 51. Проволока W подается до тех пор, пока конец верхушки не пристыкуется к части 90 регулирования подачи, как показано на фиг. 5B. Когда проволока W подается в позицию, в которой конец верхушки пристыкуется к части 90 регулирования подачи, блок 14A управления прекращает приведение в действие подающего электромотора 31.
[0077] После прекращения подачи проволоки W в прямом направлении, блок 14A управления приводит в действие электромотор 80 в направлении прямого вращения. В первой рабочей области, в которой проволока W зацепляется посредством корпуса 70 для зацепления проволоки, лезвие 74a для регулирования вращения зацепляется с зубцом 74b для регулирования вращения таким образом, что вращение втулки 71 в комбинации с вращением вращательного вала 72 регулируется. В силу этого, вращение электромотора 80 преобразуется в линейное перемещение, так что втулка 71 перемещается в прямом направлении, обозначаемом с помощью стрелки A1.
[0078] Когда втулка 71 перемещается в прямом направлении, штифт 71a для регулирования открытия/закрытия проходит через направляющие отверстия 73 для регулирования открытия/закрытия. В силу этого, как показано на фиг. 2C, первый боковой крючок 70R перемещается к центральному крючку 70C посредством операции вращения вокруг вала 71b в качестве опорной точки. Когда первый боковой крючок 70R закрывается относительно центрального крючка 70C, проволока W, размещенная посередине между первым боковым крючком 70R и центральным крючком 70C, зацепляется в таком аспекте, что проволока может перемещаться между первым боковым крючком 70R и центральным крючком 70C.
[0079] Кроме того, второй боковой крючок 70L перемещается к центральному крючку 70C посредством операции вращения вокруг вала 71b в качестве опорной точки. Когда второй боковой крючок 70L закрывается относительно центрального крючка 70C, проволока W, размещенная посередине между вторым боковым крючком 70L и центральным крючком 70C, зацепляется в таком аспекте, что проволока не может отрываться из-за второго бокового крючка 70L и центрального крючка 70C.
[0080] После продвижения втулки 71 в позицию конечной точки первой рабочей области, в которой проволока W зацепляется посредством операции закрытия первого бокового крючка 70R и второго бокового крючка 70L, блок 14A управления временно прекращает вращение электромотора 80 и приводит в действие подающий электромотор 31 в направлении обратного вращения. В силу этого, пара подающих шестерней 30 приводится в действие в направлении обратного вращения.
[0081] Следовательно, проволока W, размещенная посередине между парой подающих шестерней 30, подается в обратном направлении, обозначаемом с помощью стрелки R.
[0082] Проволока W, намотанная вокруг арматурных стержней S и зацепленная посредством корпуса 70 для зацепления проволоки, зацепляется в таком аспекте, что фрагмент на концевой стороне верхушки, размещенный посередине между вторым боковым крючком 70L и центральным крючком 70C, не может отрываться из-за второго бокового крючка 70L и центрального крючка 70C. Кроме того, проволока W, зацепленная посредством корпуса 70 для зацепления проволоки, зацепляется в таком аспекте, что фрагмент, размещенный посередине между первым боковым крючком 70R и центральным крючком 70C, может перемещаться между первым боковым крючком 70R и центральным крючком 70C в периферийном направлении контура Ru вдоль пути подачи проволоки W, но перемещение в радиальном направлении контура Ru проволоки W регулируется.
[0083] Проволока W, намотанная вокруг арматурных стержней S вдоль загибочной направляющей 50 и индукционной направляющей 51 и зацепленная на конце верхушки посредством корпуса 70 для зацепления проволоки, находится ближе к зацепленной позиции проволоки W посредством второго бокового крючка 70L и центрального крючка 70C в проволоке W2 фрагмента вдоль индукционной направляющей 51, которая представляет собой проволоку на второй стороне, расположенной на противоположной стороне по отношению к загибочной направляющей 50 относительно арматурных стержней S, чем проволока W1 фрагмента вдоль загибочной направляющей 50, которая представляет собой проволоку на первой стороне, расположенной на загибочной направляющей 50. Следует отметить, что проволока W, намотанная вокруг арматурных стержней S находится ближе к блоку 3A подачи проволоки в проволоке W1 фрагмента вдоль загибочной направляющей 50, чем проволока W2 фрагмента вдоль индукционной направляющей 51 в направлении вдоль пути подачи проволоки W.
[0084] В силу этого, в операции подачи проволоки W в обратном направлении, обозначаемом с помощью стрелки R, проволока W, намотанная вокруг арматурных стержней S, сначала натягивается в проволоке W1 фрагмента вдоль загибочной направляющей 50 в направлении блока 3A подачи проволоки таким образом, что проволока перемещается из проволоки W1 фрагмента вдоль загибочной направляющей 50 к арматурным стержням S.
[0085] Между тем, в случае если втулка 71 расположена в позиции конечной точки первой рабочей области, направляющий элемент 53, выполненный с возможностью открываться/закрываться в комбинации с перемещением втулки 71, не убирается из направляющей позиции проволоки W и выступает к радиально внутренней стороне контура Ru проволоки W, намотанной вокруг арматурных стержней S, как показано на фиг. 3B и 3D.
[0086] В силу этого, как показано на фиг. 5C, в операции подачи проволоки W в обратном направлении, обозначаемом с помощью стрелки R, проволока W1 фрагмента вдоль загибочной направляющей 50 не может входить во внутреннюю сторону из направляющего элемента 53. В этом состоянии, проволока W подается в обратном направлении таким образом, что проволока W2 фрагмента вдоль индукционной направляющей 51 натягивается к загибочной направляющей 50, и проволока W2 фрагмента вдоль индукционной направляющей 51 приближается вплотную к арматурным стержням S.
[0087] Когда подающий электромотор 31 вращается в обратном направлении, до тех пор, пока проволока W не оттягивается на предварительно определенную величину, и проволока W2 на стороне вдоль индукционной направляющей 51 входит в контакт с арматурными стержнями S, блок 14A управления прекращает приведение в действие подающего электромотора 31 в направлении обратного вращения. Время, когда подача проволоки W в обратном направлении прекращается, определяется посредством блока 14A управления, на основе любого либо комбинации из истечения времени после того, как приведение в действие подающего электромотора 31 в направлении обратного вращения начинается, величины подачи проволоки W, определенной посредством величины вращения подающего электромотора 31 и т.п., и нагрузки, прикладываемой к проволоке W, определенной посредством нагрузки, прикладываемой к подающему электромотору 31 и т.п.
[0088] После прекращения приведения в действие подающего электромотора 31 в направлении обратного вращения, подающий электромотор 31 приводится в действие в направлении прямого вращения таким образом, что проволока W1 на стороне загибочной направляющей 50 ослабляется, как показано на фиг. 5D. Как результат, если направляющий элемент 53 прижимается посредством проволоки W, эта ситуация разрешается.
[0089] Когда подающий электромотор 31 вращается вперед до тех пор, пока проволока W1 на стороне загибочной направляющей 50 не ослабляется посредством предварительно определенной величины, блок 14A управления прекращает приведение в действие подающего электромотора 31 в направлении прямого вращения и затем приводит в действие электромотор 80 в направлении прямого вращения. В силу этого, как показано на фиг. 5E, втулка 71 перемещается в прямом направлении, обозначаемом с помощью стрелки A1, в позицию конечной точки второй рабочей области, в которой направляющий элемент 53 перемещается из направляющей позиции в убранную позицию.
[0090] Когда втулка 71 перемещается в прямом направлении, обозначаемом с помощью стрелки A1, в позицию конечной точки второй рабочей области, направляющий элемент 53 убирается из направляющей позиции проволоки W, как показано на фиг. 3C и 3E. Перед операцией убирания направляющего элемента 53, проволока W на стороне загибочной направляющей 50 ослабляется таким образом, что если направляющий элемент 53 прижимается посредством проволоки W, эта ситуация разрешается. За счет этого, подавляется приложение нагрузки посредством проволоки W к направляющему элементу 53 таким образом, что направляющий элемент 53 надежно перемещается в убранную позицию.
[0091] Когда электромотор 80 вращается вперед до тех пор, пока втулка 71 не перемещается в позицию конечной точки второй рабочей области, блок 14A управления прекращает приведение в действие электромотора 80 в направлении прямого вращения и затем приводит в действие подающий электромотор 31 в направлении обратного вращения, за счет этого подавая проволоку W в обратном направлении, обозначаемом с помощью стрелки R.
[0092] Когда втулка 71 перемещается в позицию конечной точки второй рабочей области, направляющий элемент 53, выполненный с возможностью открываться и закрываться в комбинации с перемещением втулки 71, перемещается из направляющей позиции в убранную позицию проволоки W, как описано выше. Следовательно, отсутствует выступ, который затрудняет перемещение проволоки W к радиально внутренней стороне контура Ru проволоки W, намотанной вокруг арматурных стержней S.
[0093] В силу этого, как показано на фиг. 5F, в операции подачи проволоки W в обратном направлении, проволока W1 на стороне вдоль загибочной направляющей 50 натягивается к блоку 3A подачи проволоки таким образом, что проволока W перемещается к арматурным стержням S и наматывается на арматурные стержни S.
[0094] Когда проволока W оттягивается в позицию, в которой проволока наматывается на арматурные стержни S, блок 14A управления прекращает приведение в действие подающего электромотора 31 в направлении обратного вращения и затем приводит в действие электромотор 80 в направлении прямого вращения, за счет этого перемещая втулку 71 в прямом направлении, обозначаемом с помощью стрелки A1. Когда операция перемещения втулки 71 в прямом направлении передается в режущий блок 6A посредством трансмиссионного механизма 62 таким образом, что часть 61 с подвижным лезвием вращается, и втулка 71 перемещается в позицию конечной точки третьей рабочей области, проволока W, зацепленная посредством первого бокового крючка 70R и центрального крючка 70C, отрезается посредством операции части 60 с неподвижным лезвием и части 61 с подвижным лезвием.
[0095] Изгибающие фрагменты 71c1 и 71c2 перемещаются к арматурным стержням S практически одновременно с тем, когда проволока W отрезается. В силу этого, концевая сторона верхушки проволоки W, зацепленной посредством центрального крючка 70C и второго бокового крючка 70L, прижимается к арматурным стержням S и изгибается к арматурным стержням S в зацепленной позиции в качестве опорной точки посредством изгибающего фрагмента 71c1. Втулка 71 дополнительно перемещается в прямом направлении таким образом, что проволока W, зацепленная между вторым боковым крючком 70L и центральным крючком 70C, поддерживается с размещением посередине посредством изгибающего фрагмента 71c1.
[0096] Кроме того, концевая сторона наконечника проволоки W, зацепленной посредством центрального крючка 70C и первого бокового крючка 70R и отрезанной посредством режущего блока 6A, прижимается к арматурным стержням S и изгибается к арматурным стержням S в позиции зацепления в качестве опорной точки посредством изгибающего фрагмента 71c2. Втулка 71 дополнительно перемещается в прямом направлении таким образом, что проволока W, зацепленная между первым боковым крючком 70R и центральным крючком 70C, поддерживается с размещением посередине посредством изгибающего фрагмента 71c2.
[0097] После того, как концевая сторона верхушки и концевая сторона наконечника проволоки W изгибаются к арматурным стержням S, электромотор 80 дополнительно приводится в действие в направлении прямого вращения таким образом, что втулка 71 дополнительно перемещается в прямом направлении. Когда втулка 71 перемещается в предварительно определенную позицию и достигает рабочей области, в которой проволока W, зацепленная посредством корпуса 70 для зацепления проволоки, скручивается, зацепление лезвия 74a для регулирования вращения с зубцом 74b для регулирования вращения прекращается.
[0098] В силу этого, электромотор 80 дополнительно приводится в действие в направлении прямого вращения таким образом, что корпус 70 для зацепления проволоки вращается в комбинации с вращательным валом 72, за счет этого скручивая проволоку W.
[0099] В обвязочном блоке 7A, в рабочей области, в которой втулка 71 вращается, арматурные стержни S пристыкуются к стыкующейся части 91, так что перемещение назад арматурных стержней S к обвязочному блоку 7A регулируется. Следовательно, проволока W скручивается таким образом, что прикладывается сила протягивания вперед корпуса 70 для зацепления проволоки вдоль осевого направления вращательного вала 72.
[0100] Когда сила перемещения вперед корпуса 70 для зацепления проволоки вдоль осевого направления вращательного вала 72 прикладывается к корпусу 70 для зацепления проволоки, вращательный вал 72 может перемещаться вперед принимая на себя силу, отталкиваемую назад посредством пружины 72c. В силу этого, в обвязочном блоке 7A, в рабочей области, в которой втулка 71 вращается, корпус 70 для зацепления проволоки и вращательный вал 72 скручивают проволоку W при перемещении вперед.
[0101] Когда нагрузка, прикладываемая к электромотору 80, обнаруживается, и нагрузка, прикладываемая к электромотору, становится предварительно определенным значением, например, максимальным значением, блок 14A управления прекращает вращение электромотора 80 в прямом направлении в предварительно определенное время.
[0102] После этого, блок 14A управления вращает в обратном направлении электромотор 80. Когда электромотор 80 приводится в действие в направлении обратного вращения, лезвие 74a для регулирования вращения зацепляется с зубцом 74b для регулирования вращения таким образом, что вращение втулки 71 в комбинации с вращением вращательного вала 72 регулируется. В силу этого втулка 71 перемещается в обратном направлении, обозначаемом с помощью стрелки A2.
[0103] Когда втулка 71 перемещается назад, изгибающие фрагменты 71c1 и 71c2 отделяются от проволоки W, и зацепленное состояние проволоки W посредством изгибающих фрагментов 71c1 и 71c2 разблокируется. Кроме того, когда втулка 71 перемещается назад, штифт 71a для регулирования открытия/закрытия проходит через направляющие отверстия 73 для регулирования открытия/закрытия. В силу этого, первый боковой крючок 70R перемещается в направлении от центрального крючка 70C посредством операции вращения вокруг вала 71b в качестве опорной точки. Второй боковой крючок 70L также перемещается в направлении от центрального крючка 70C посредством операции вращения вокруг вала 71b в качестве опорной точки. В силу этого, проволока W отрывается от корпуса 70 для зацепления проволоки.
[0104] Пример функциональных преимуществ машины для обвязки арматурных стержней
В обвязочной машине предшествующего уровня техники в состоянии, в котором проволока W обматывается вокруг арматурных стержней S вдоль загибочной направляющей 50 и индукционной направляющей 51, после того, как проволока W зацепляется посредством корпуса 70 для зацепления проволоки, проволока W подается в обратном направлении в состоянии, в котором направляющий элемент 53 перемещается из направляющей позиции в убранную позицию проволоки W.
[0105] В этом случае, проволока перемещается к арматурным стержням S из проволоки W1 фрагмента вдоль загибочной направляющей 50 близко к блоку 3A подачи проволоки в направлении вдоль пути подачи проволоки W, намотанной вокруг арматурных стержней S вдоль загибочной направляющей 50 и индукционной направляющей 51. Когда проволока W1 фрагмента вдоль загибочной направляющей 50 перемещается в позицию, в которой проволока входит в контакт с арматурными стержнями S, нагрузка подачи проволоки W в обратном направлении увеличивается вследствие трения между проволокой W и арматурными стержнями S. По этой причине, проволока W2 фрагмента вдоль индукционной направляющей 51, расположенной на противоположной стороне по отношению к загибочной направляющей 50 относительно арматурных стержней S, не может оттягиваться в достаточной степени таким образом, что проволока W может не наматываться на арматурные стержни S.
[0106] Напротив, согласно машине 1A для обвязки арматурных стержней настоящего варианта осуществления, как описано выше, в состоянии, в котором проволока W обматывается вокруг арматурных стержней S вдоль загибочной направляющей 50 и индукционной направляющей 51, после того, как проволока W зацепляется посредством корпуса 70 для зацепления проволоки, проволока W подается в обратном направлении в состоянии, в котором направляющий элемент 53 выступает к направляющей позиции проволоки W.
[0107] В силу этого, из проволоки W, намотанной вокруг арматурных стержней S и зацепленной посредством корпуса 70 для зацепления проволоки, ограничивается перемещение проволоки фрагмента, который находится близко к блоку 3A подачи проволоки и может перемещаться в периферийном направлении контура Ru вдоль пути подачи проволоки W, т.е. проволоки W1 фрагмента вдоль загибочной направляющей 50, к арматурным стержням S посредством направляющего элемента 53. В этом состоянии, проволока фрагмента близко к концевой стороне верхушки проволоки W, которая зацепляется посредством корпуса 70 для зацепления проволоки и в силу этого не перемещена в периферийном направлении контура Ru вдоль пути подачи проволоки W, т.е. проволока W2 фрагмента вдоль индукционной направляющей 51, расположенной на противоположной стороне по отношению к загибочной направляющей 50 относительно арматурных стержней S, перемещается к арматурным стержням S таким образом, что проволока W2 фрагмента вдоль индукционной направляющей 51 приводится в контакт с арматурными стержнями S. Затем проволока W дополнительно подается в обратном направлении в состоянии, в котором направляющий элемент 53 перемещается из направляющей позиции в убранную позицию проволоки W. В силу этого, как показано на фиг. 5F, проволока W1 фрагмента вдоль загибочной направляющей 50 перемещается к арматурным стержням S, что заставляет проволоку W1 фрагмента вдоль загибочной направляющей 50 контактировать с арматурными стержнями S таким образом, что проволока W может надежно наматываться на арматурные стержни S.
[0108] Модифицированный вариант осуществления машины для обвязки арматурных стержней
Фиг. 6A является видом сбоку, показывающим пример подвижного механизма направляющего элемента второго варианта осуществления, фиг. 6B и 6C являются видом снизу в сечении, показывающим пример операций подвижного механизма направляющего элемента второго варианта осуществления, и фиг. 6D и 6E являются видами спереди в сечении, показывающими пример операций подвижного механизма направляющего элемента второго варианта осуществления. Далее описывается пример подвижного механизма направляющего элемента второго варианта осуществления со ссылкой на соответствующие чертежи. Следует отметить, что фиг. 6B и 6C являются видами в сечении вдоль линии C-C по фиг. 6A и фиг. 6D и 6E являются видами в сечении вдоль линии D-D по фиг. 6A.
[0109] Тогда как подвижный механизм 54A направляющего элемента первого варианта осуществления выполнен с возможностью перемещения направляющего элемента 53 в убранную позицию посредством силы пружины, подвижный механизм 54B направляющего элемента второго варианта осуществления выполнен с возможностью перемещения направляющего элемента 53 в направляющую позицию посредством силы пружины.
[0110] Подвижный механизм 54B направляющего элемента второго варианта осуществления имеет опорную часть 55B направляющего элемента, к которой присоединяется направляющий элемент 53, и приводящую часть 56B направляющего элемента, выполненную с возможностью приводить в действие опорную часть 55B направляющего элемента.
[0111] Опорная часть 55B направляющего элемента имеет форму протягивания в осевом направлении вращательного вала 72, показанного на фиг. 2B, 2C и т.п., и предоставляется на одном концевом фрагменте с направляющим элементом 53. Направляющий элемент 53 имеет, например, кубоидную форму и выступает поперечно из опорной части 55B направляющего элемента. Фрагмент опорной части 55B направляющего элемента между стороной одного концевого фрагмента и стороной другого концевого фрагмента поддерживается с возможностью вращения посредством вала 55G. Осевое направление, которое представляет собой направление протягивания вала 55G, представляет собой направление вверх и вниз, ортогональное направлению протягивания направляющего элемента 53. Опорная часть 55B направляющего элемента предоставляется на стороне другого концевого фрагмента с подлежащим управлению фрагментом 55J для выполнения операции вращения вокруг вала 55G в качестве опорной точки и прекращения операции вращения посредством подталкивания посредством приводящей части 56B направляющего элемента.
[0112] Направляющий элемент 53 выполнен с возможностью перемещаться между направляющей позицией, в которой он выступает к пути подачи проволоки W загибочной направляющей 50 и загибает проволоку W, и убранной позицией, в которой он убирается поперечно из пути подачи проволоки W загибочной направляющей 50 посредством операции вращения опорной части 55B направляющего элемента вокруг вала 55G в качестве опорной точки.
[0113] Приводящая часть 56B направляющего элемента имеет форму протягивания в осевом направлении вращательного вала 72 и поддерживается посредством направляющего выпуклого фрагмента 56F таким образом, что фрагмент между стороной одного концевого фрагмента и стороной другого концевого фрагмента может перемещаться вдоль направления перемещения втулки 71, которое представляет собой осевое направление вращательного вала 72. Приводящая часть 56B направляющего элемента выполнена с возможностью перемещаться в направлении вперед и назад, которое представляет собой осевое направление вращательного вала 72, в комбинации с втулкой 71, выполненной с возможностью перемещаться посредством вращения вращательного вала 72. Приводящая часть 56B направляющего элемента также предоставляется на стороне одного концевого фрагмента с рабочим фрагментом 56J для подталкивания подлежащего управлению фрагмента 55J опорной части 55B направляющего элемента. Приводящая часть 56B направляющего элемента также предоставляется на стороне другого концевого фрагмента с зацепляющим фрагментом 56G для зацепления с втулкой 71.
[0114] Подвижный механизм 54B направляющего элемента имеет пружину 57B для поджимания направляющего элемента 55A в направлении, в котором направляющий элемент 53 перемещается в направляющую позицию. Пружина 57B сконструирована посредством крутильной спиральной пружины и присоединяется к валу 55G.
[0115] Как показано на фиг. 6B, подвижный механизм 54B направляющего элемента имеет такую конфигурацию, в которой когда приводящая часть 56B направляющего элемента перемещается в позицию, в которой рабочий фрагмент 56J приводящей части 56B направляющего элемента отделяется от подлежащего управлению фрагмента 55J опорной части 55B направляющего элемента, регулирование относительно вращения опорной части 55B направляющего элемента вокруг вала 55G в качестве опорной точки прекращается. В силу этого, как показано на фиг. 6B и 6D, направляющий элемент 53 поджимается посредством пружины 57B и перемещается в направляющую позицию.
[0116] Напротив, как показано на фиг. 6C, подвижный механизм 54B направляющего элемента имеет такую конфигурацию, в которой когда приводящая часть 56B направляющего элемента перемещается в позицию, в которой рабочий фрагмент 56J приводящей части 56B направляющего элемента подталкивает подлежащий управлению фрагмент 55J опорной части 55B направляющего элемента, опорная часть 55B направляющего элемента подталкивается и вращается посредством приводящей части 56B направляющего элемента, и вращение опорной части 55B направляющего элемента посредством пружины 57B регулируется. В силу этого, как показано на фиг. 6C и 6E, направляющий элемент 53 перемещается из направляющей позиции в убранную позицию.
[0117] Фиг. 7A является видом сбоку, показывающим пример подвижного механизма направляющего элемента третьего варианта осуществления, фиг. 7B является видом снизу в сечении, показывающим пример операций подвижного механизма направляющего элемента третьего варианта осуществления, и фиг. 7C-7F являются видами спереди в сечении, показывающими пример операций подвижного механизма направляющего элемента третьего варианта осуществления. Далее описывается пример подвижного механизма направляющего элемента третьего варианта осуществления со ссылкой на соответствующие чертежи. Следует отметить, что фиг. 7B является видом в сечении вдоль линии E-E по фиг. 7A, фиг. 7C и 7E являются видами в сечении вдоль линии F-F по фиг. 7A, и фиг. 7D и 7F являются видами в сечении вдоль линии G-G по фиг. 7A.
[0118] Подвижный механизм 54C направляющего элемента третьего варианта осуществления включает в себя направляющий элемент 53C, выполненный с возможностью регулировать перемещение проволоки W во время оттягивания проволоки W, в дополнение к направляющему элементу 53, выполненному с возможностью загибания проволоки W. Направляющий элемент 53C составляет натягивающий блок для натягивания проволоки W из предварительно определенной стороны посредством взаимодействия с блоком 3A подачи проволоки, и направляющий элемент 53C выполнен с возможностью работать независимо от втулки 71. Следует отметить, что подвижный механизм 54A направляющего элемента, выполненный с возможностью перемещения направляющего элемента 53, может быть идентичным конфигурации, описанной со ссылкой на фиг. 3A-3E.
[0119] Подвижный механизм 54C направляющего элемента третьего варианта осуществления имеет пружину 57C для поджимания направляющего элемента 53C в направлении перемещения направляющего элемента 53C в направляющую позицию, в которой перемещение проволоки W регулируется при оттягивании проволоки W. Направляющий элемент 53C имеет индукционную часть 53G, имеющую клиновидную форму на концевой стороне верхушки, с которой проволока W приводится в контакт, и выполнен с возможностью формирования усилия для перемещения из направляющей позиции в убранную позицию. Когда проволока W приводится в контакт с индукционной частью 53G направляющего элемента 53C при оттягивании проволоки W, сила подталкивания направляющего элемента 53C в направлении его перемещения из направляющей позиции в убранную позицию формируется.
[0120] Операция подвижного механизма 54A направляющего элемента, перемещающего направляющий элемент 53, является такой, как описано выше. Как показано на фиг. 7B, когда приводящая часть 56A направляющего элемента перемещается в позицию, в которой рабочий фрагмент 56H приводящей части 56A направляющего элемента подталкивает подлежащий управлению фрагмент 55H опорной части 55A направляющего элемента, вращение опорной части 55A направляющего элемента вокруг вала 55G в качестве опорной точки регулируется. В силу этого, как показано на фиг. 7C, направляющий элемент 53 перемещается в направляющую позицию.
[0121] Напротив, когда приводящая часть 56A направляющего элемента перемещается в позицию, в которой рабочий фрагмент 56H приводящей части 56A направляющего элемента отделяется от подлежащего управлению фрагмента 55H опорной части 55A направляющего элемента, регулирование относительно вращения опорной части 55B направляющего элемента вокруг вала 55G в качестве опорной точки прекращается. В силу этого, как показано на фиг. 7E, опорная часть 55A направляющего элемента поджимается и вращается посредством пружины 57A, и направляющий элемент 53 перемещается из направляющей позиции в убранную позицию.
[0122] Когда проволока W подается и оттягивается в обратном направлении в состоянии, в котором направляющий элемент 53 перемещается в убранную позицию, направляющий элемент 53C перемещается в направляющую позицию, как показано на фиг. 7D, таким образом, что перемещение проволоки W фрагмента вдоль загибочной направляющей 50 к арматурным стержням S посредством направляющего элемента 53C ограничивается. В силу этого, проволока W фрагмента вдоль индукционной направляющей 51 сначала перемещается к арматурным стержням S и может в силу этого входить в контакт с арматурными стержнями S.
[0123] Проволока W дополнительно подается в обратном направлении из состояния, в котором проволока W находится в контакте с направляющим элементом 53C таким образом, что индукционная часть 53G формирует силу подталкивания направляющего элемента 53C в направлении его перемещения из направляющей позиции в убранную позицию, и направляющий элемент 53C перемещается в убранную позицию при сжатии пружины 57C, как показано на фиг. 7F. В силу этого, проволока W фрагмента вдоль загибочной направляющей 50 перемещается к арматурным стержням S за пределами направляющего элемента 53C и может входить в контакт с арматурными стержнями S.
[0124] Фиг. 8A является видом сбоку, показывающим пример направляющего элемента другого модифицированного варианта осуществления, и фиг. 8B является видом спереди в сечении, показывающим пример операций направляющего элемента другого модифицированного варианта осуществления. Далее описывается пример направляющего элемента другого модифицированного варианта осуществления со ссылкой на соответствующие чертежи. Следует отметить, что фиг. 8B является видом в сечении вдоль линии H-H по фиг. 8A.
[0125] Направляющий элемент 53H другого модифицированного варианта осуществления размещается в позиции, в которой проволока W загибается и прикрепляется к загибочной направляющей 50. Направляющий элемент 53H выполнен с возможностью ограничивать перемещение проволоки W при оттягивании проволоки W и составляет натягивающий блок для натягивания проволоки W из предварительно определенной стороны посредством взаимодействия с блоком 3A подачи проволоки.
[0126] Направляющий элемент 53H имеет индукционную часть 53J, имеющую клиновидную форму в части, с которой приводится в контакт проволока W, подаваемая в обратном направлении посредством блока 3A подачи проволоки, и выполнен с возможностью направления проволоки W. Направляющий элемент 53H выполнен с возможностью направления проволоки W, намотанной вокруг арматурных стержней S, к радиально внутренней стороне контура Ru, сформированного посредством проволоки W, намотанной вокруг арматурных стержней S, по мере того, как проволока W, подаваемая в обратном направлении посредством блока 3A подачи проволоки, приводится в контакт с индукционной частью 53J. Направляющий элемент 53H имеет зазор, сформированный между индукционной частью 53J и противостоящей загибочной направляющей 50, через который может проходить проволока W.
[0127] Когда проволока W, намотанная вокруг арматурных стержней S, подается и оттягивается в обратном направлении, проволока W входит в контакт с направляющим элементом 53H таким образом, что перемещение проволоки W фрагмента вдоль загибочной направляющей 50 к арматурным стержням S посредством направляющего элемента 53H ограничивается. В силу этого, проволока W фрагмента вдоль индукционной направляющей 51 сначала перемещается к арматурным стержням S и может в силу этого входить в контакт с арматурными стержнями S.
[0128] Проволока W дополнительно подается в обратном направлении из состояния, в котором проволока W находится в контакте с направляющим элементом 53H таким образом, что проволока W в контакте с направляющим элементом 53H направляется к радиально внутренней стороне контура Ru, сформированного посредством проволоки W, намотанной вокруг арматурных стержней S, при придерживании формы индукционной части 53J. В силу этого, проволока W фрагмента вдоль загибочной направляющей 50 может перемещаться к арматурным стержням S за пределами направляющего элемента 53H и может входить в контакт с арматурными стержнями S.
[0129] Фиг. 9 является видом сбоку основных частей, показывающим модифицированный вариант осуществления обвязочной машины. Обвязочная машина 1B модифицированного варианта осуществления имеет конфигурацию, в которой блок 5B формирования загиба имеет загибочную направляющую 50, которая представляет собой пример первой направляющей части, и не имеет индукционную направляющую 51, показанную на фиг. 1 и т.п., которая представляет собой пример второй направляющей части.
[0130] Загибочная направляющая 50 выполнена с возможностью загибания проволоки W, которая, подается посредством блока 3A подачи проволоки, и направлять проволоку W в обвязочный блок 7A, за счет этого обматывая проволоку W вокруг арматурных стержней S.
[0131] В обвязочной машине 1B, в состоянии, в котором проволока W обматывается вокруг арматурных стержней S вдоль загибочной направляющей 50, проволока W зацепляется посредством корпуса 70 для зацепления проволоки, и затем проволока W подается в обратном направлении в состоянии, в котором направляющий элемент 53 выступает к направляющей позиции проволоки W.
[0132] В силу этого, из проволоки W, намотанной вокруг арматурных стержней S и зацепленной посредством корпуса 70 для зацепления проволоки, ограничивается перемещение проволоки фрагмента, который находится близко к блоку 3A подачи проволоки и может перемещаться в периферийном направлении контура Ru вдоль пути подачи проволоки W, т.е. проволоки W фрагмента вдоль загибочной направляющей 50, к арматурным стержням S посредством направляющего элемента 53. В этом состоянии, проволока фрагмента близко к концевой стороне верхушки проволоки W, которая зацепляется посредством корпуса 70 для зацепления проволоки и в силу этого не перемещена в периферийном направлении контура Ru вдоль пути подачи проволоки W, т.е. проволоки W, расположенной на противоположной стороне по отношению к загибочной направляющей 50 относительно арматурных стержней S, перемещается к арматурным стержням S и приводится в контакт с арматурными стержнями S. Затем проволока W дополнительно подается в обратном направлении в состоянии, в котором направляющий элемент 53 перемещается из направляющей позиции в убранную позицию проволоки W. В силу этого, проволока W фрагмента вдоль загибочной направляющей 50 перемещается к арматурным стержням S, что заставляет проволоку контактировать с арматурными стержнями S таким образом, что проволока W может надежно наматываться на арматурные стержни S.
[0133] Фиг. 10 является видом сбоку основных частей, показывающим другой модифицированный вариант осуществления обвязочной машины. В обвязочной машине 1C другого модифицированного варианта осуществления, блок 5C формирования загиба имеет загибочную направляющую 50C и индукционную направляющую 51C. Блок 5C формирования загиба выполнен с возможностью открываться и закрываться по мере того, как, по меньшей мере, одна из загибочной направляющей 50C и индукционной направляющей 51C перемещается в направлении контакта/разделения относительно другой. В состоянии, в котором загибочная направляющая 50C и индукционная направляющая 51C закрываются, загибочная направляющая 50C и индукционная направляющая 51C соединяются между собой.
[0134] Загибочная направляющая 50C выполнена с возможностью загибания проволоки W, которая, подается посредством блока 30 подачи проволоки. Индукционная направляющая 51C выполнена с возможностью направления проволоки W, загибаемой посредством загибочной направляющей 50C, в обвязочный блок 7A. В силу этого проволока W обматывается вокруг арматурных стержней S.
[0135] В обвязочной машине 1C, в состоянии, в котором проволока W обматывается вокруг арматурных стержней S вдоль загибочной направляющей 50C и индукционной направляющей 51C, проволока W зацепляется посредством корпуса 70 для зацепления проволоки, и затем проволока W подается в обратном направлении в состоянии, в котором направляющий элемент 53 выступает к направляющей позиции проволоки W.
[0136] В силу этого из проволоки W, намотанной вокруг арматурных стержней S и зацепленной посредством корпуса 70 для зацепления проволоки, ограничивается перемещение проволоки фрагмента, который находится близко к блоку 3A подачи проволоки и может перемещаться в периферийном направлении контура Ru вдоль пути подачи проволоки W, т.е. проволоки W фрагмента вдоль загибочной направляющей 50C, к арматурным стержням S посредством направляющего элемента 53. В этом состоянии, проволока фрагмента близко к концевой стороне верхушки проволоки W, которая зацепляется посредством корпуса 70 для зацепления проволоки и в силу этого не перемещена в периферийном направлении контура Ru вдоль пути подачи проволоки W, т.е. проволоки W фрагмента вдоль индукционной направляющей 51C, расположенной на противоположной стороне по отношению к загибочной направляющей 50C относительно арматурных стержней S, сначала перемещается к арматурным стержням S и приводится в контакт с арматурными стержнями S. Затем проволока W дополнительно подается в обратном направлении в состоянии, в котором направляющий элемент 53 перемещается из направляющей позиции в убранную позицию проволоки W. В силу этого, проволока W фрагмента вдоль загибочной направляющей 50C перемещается к арматурным стержням S, что заставляет проволоку контактировать с арматурными стержнями S таким образом, что проволока W может надежно наматываться на арматурные стержни S.
| название | год | авторы | номер документа |
|---|---|---|---|
| Обвязочная машина | 2021 |
|
RU2812842C2 |
| ОБВЯЗОЧНАЯ МАШИНА | 2021 |
|
RU2807053C2 |
| ОБВЯЗОЧНАЯ МАШИНА | 2021 |
|
RU2818274C2 |
| ОБВЯЗОЧНАЯ МАШИНА | 2021 |
|
RU2806762C2 |
| Обвязочная машина | 2021 |
|
RU2807791C2 |
| ОБВЯЗОЧНАЯ МАШИНА | 2016 |
|
RU2689108C1 |
| ОБВЯЗОЧНАЯ МАШИНА | 2016 |
|
RU2781589C2 |
| ОБВЯЗОЧНАЯ МАШИНА | 2016 |
|
RU2675829C1 |
| ОБВЯЗОЧНАЯ МАШИНА | 2016 |
|
RU2764843C1 |
| ОБВЯЗОЧНАЯ МАШИНА | 2019 |
|
RU2799425C2 |
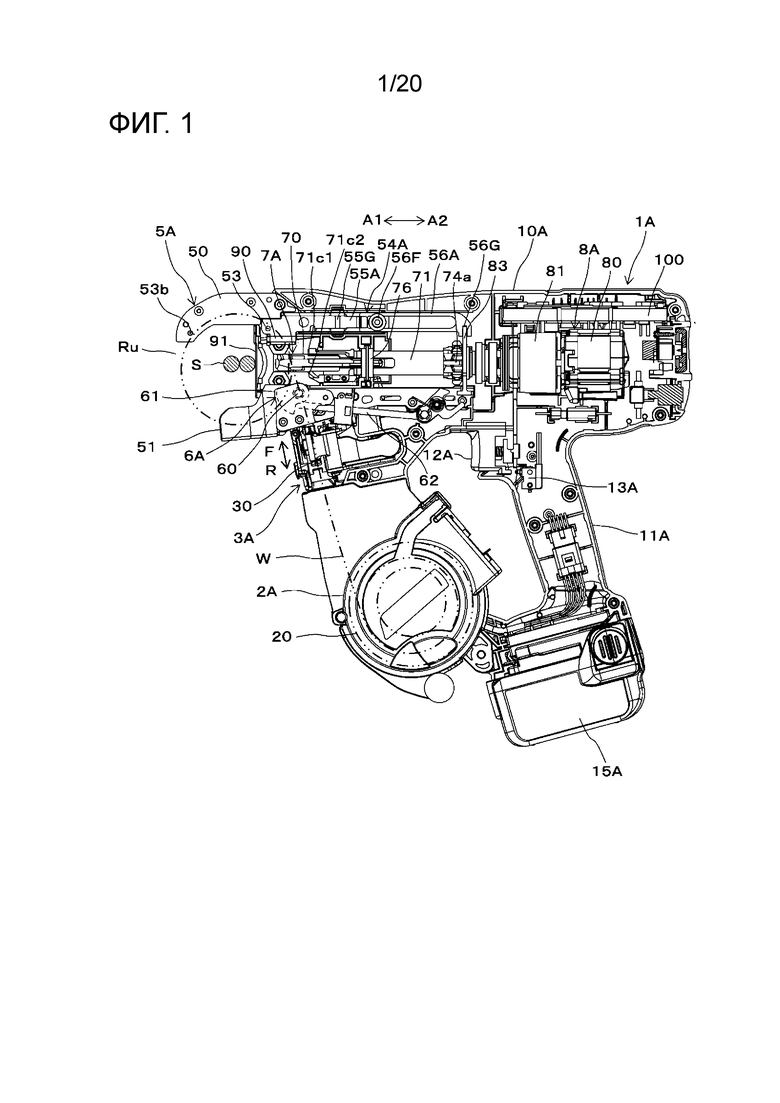
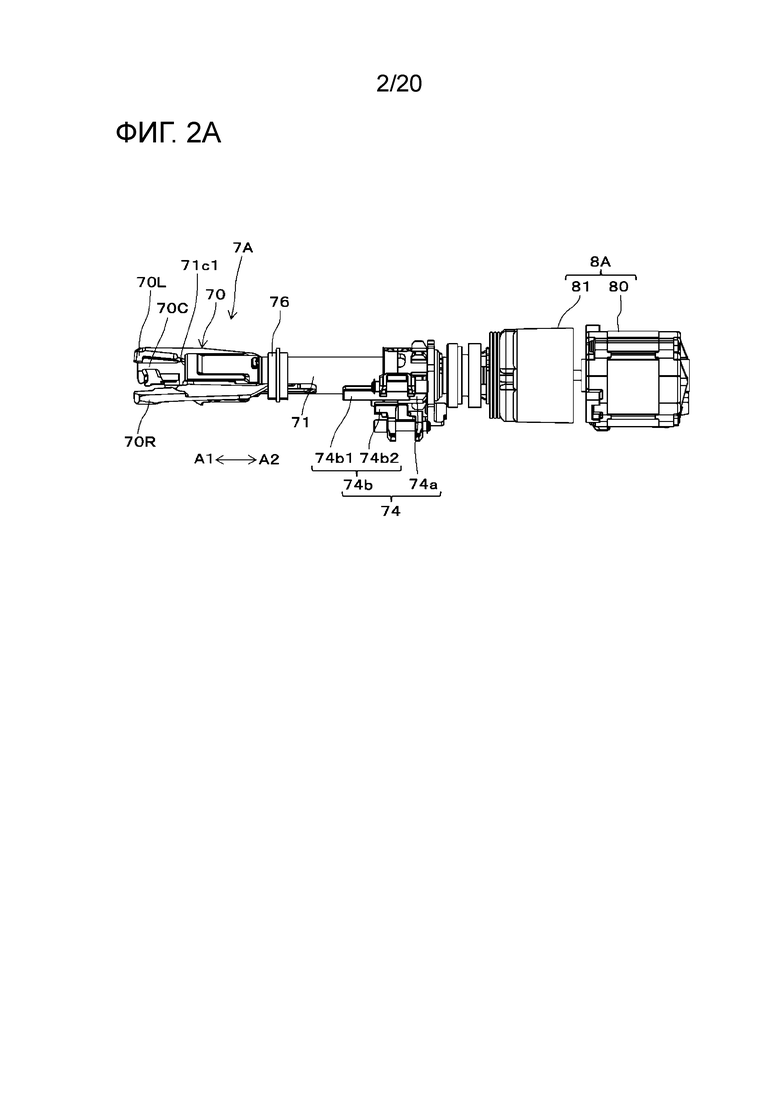
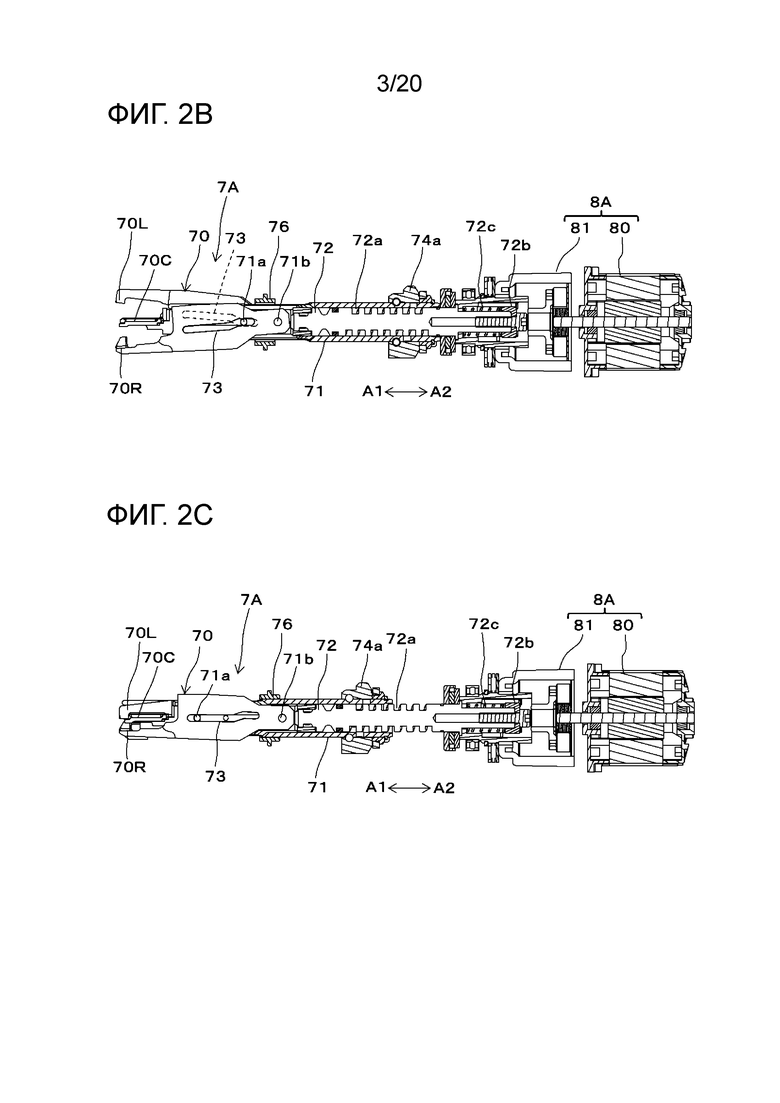
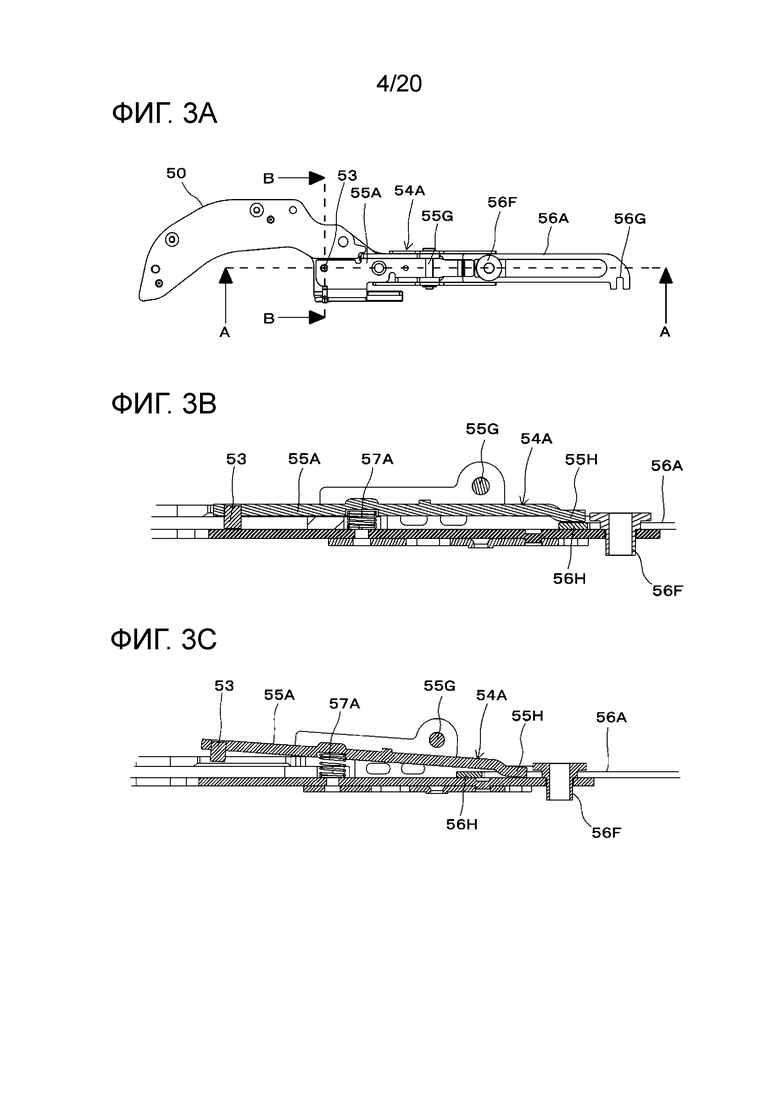
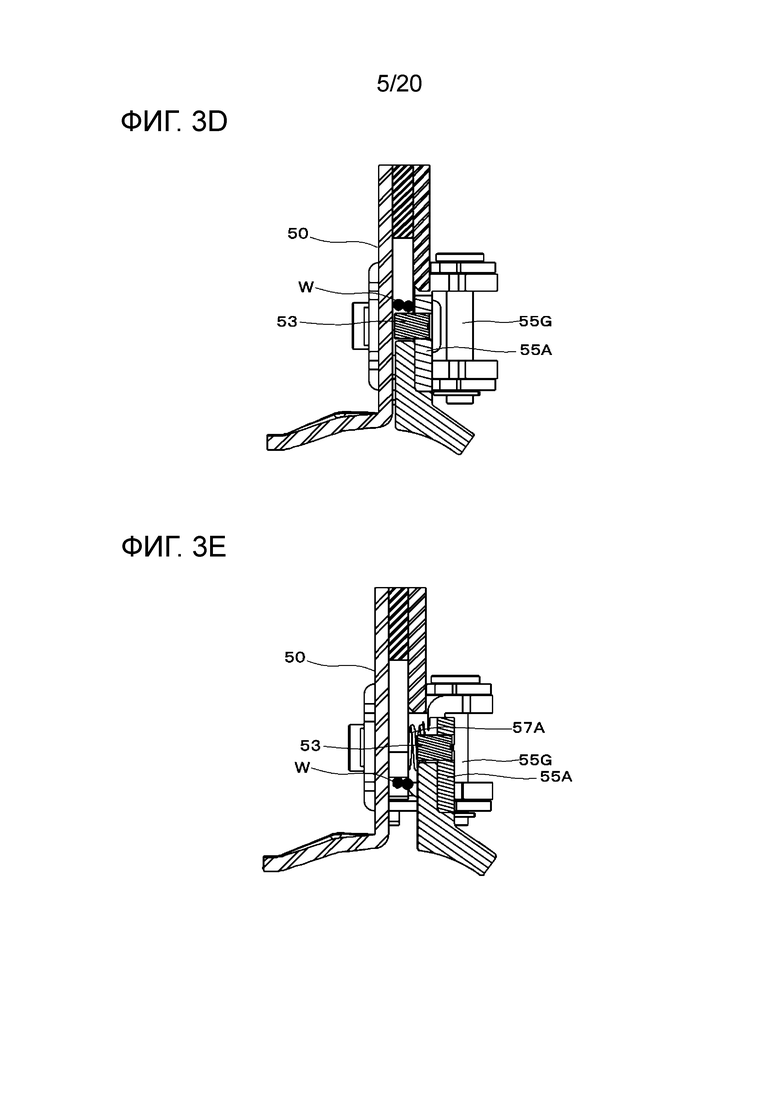
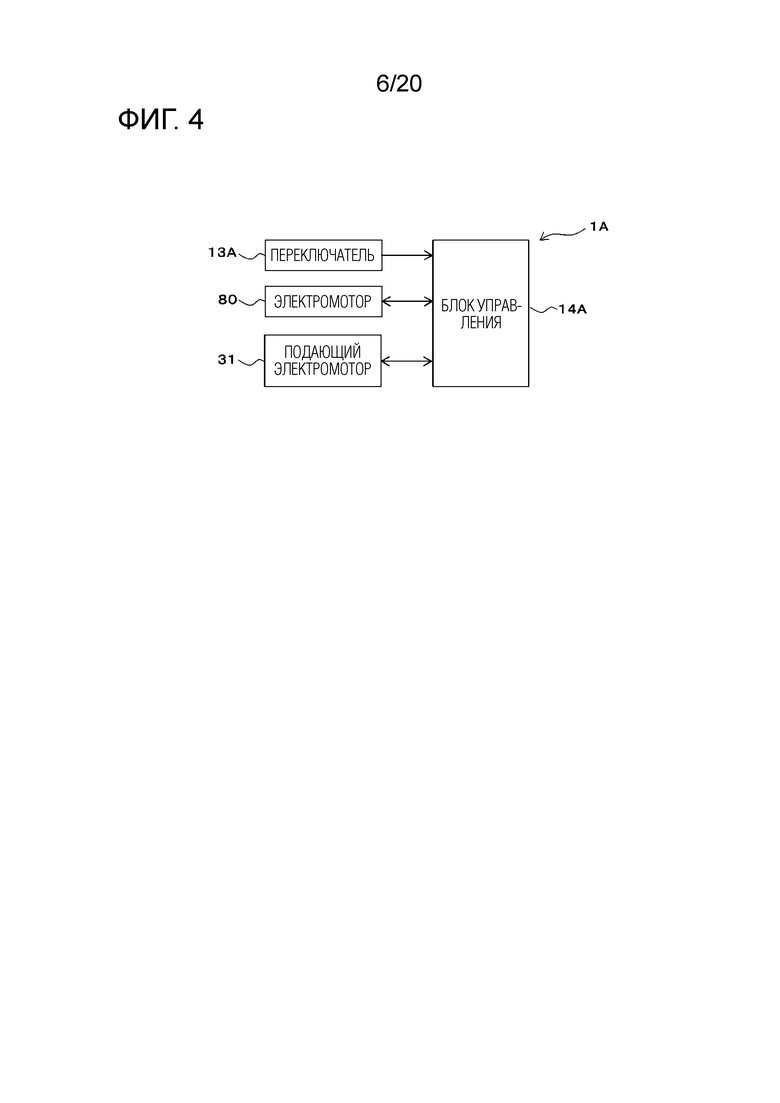
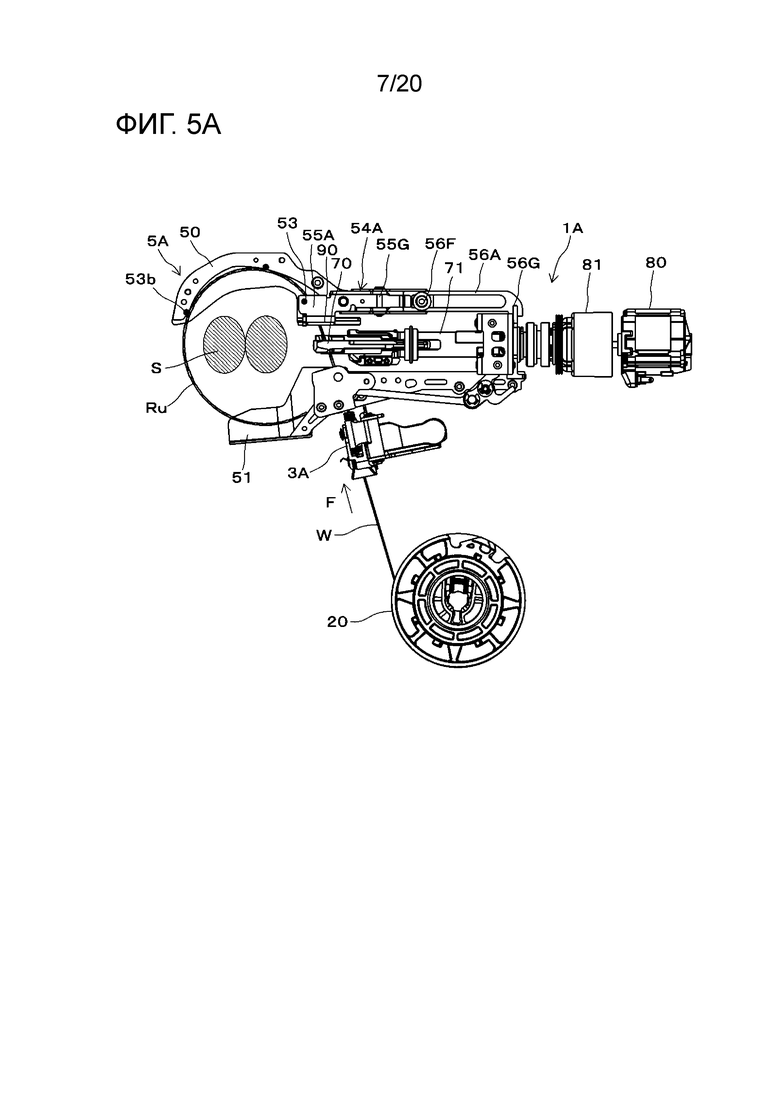
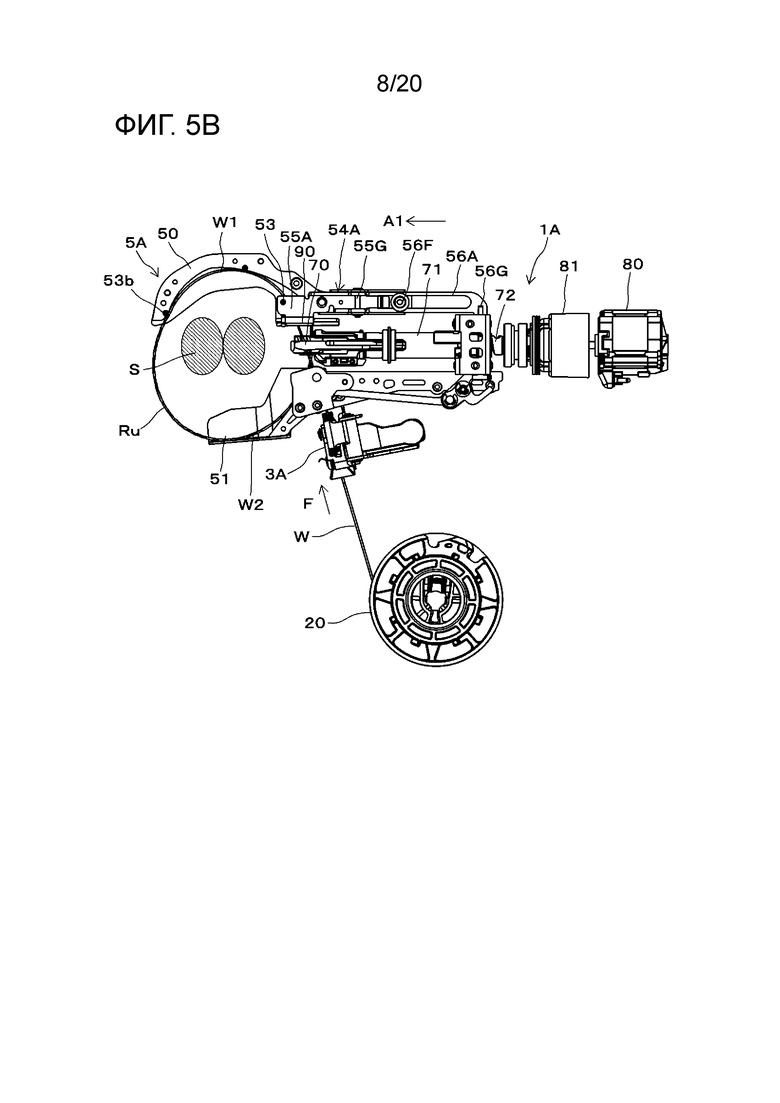
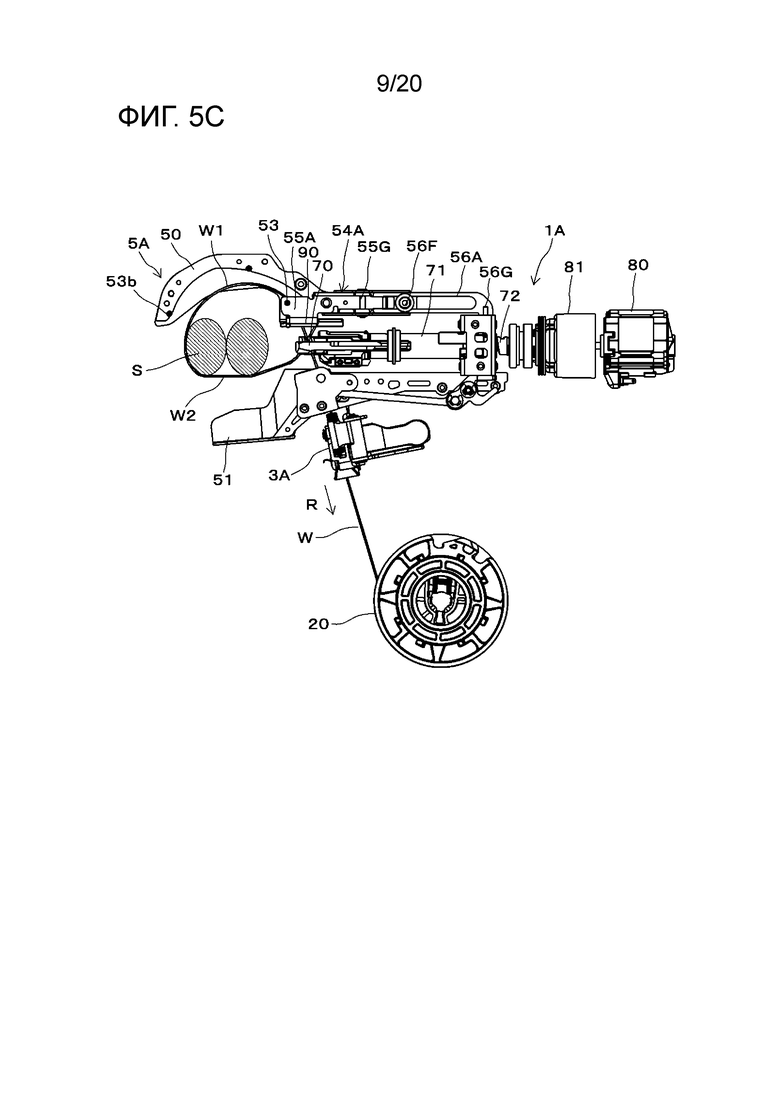
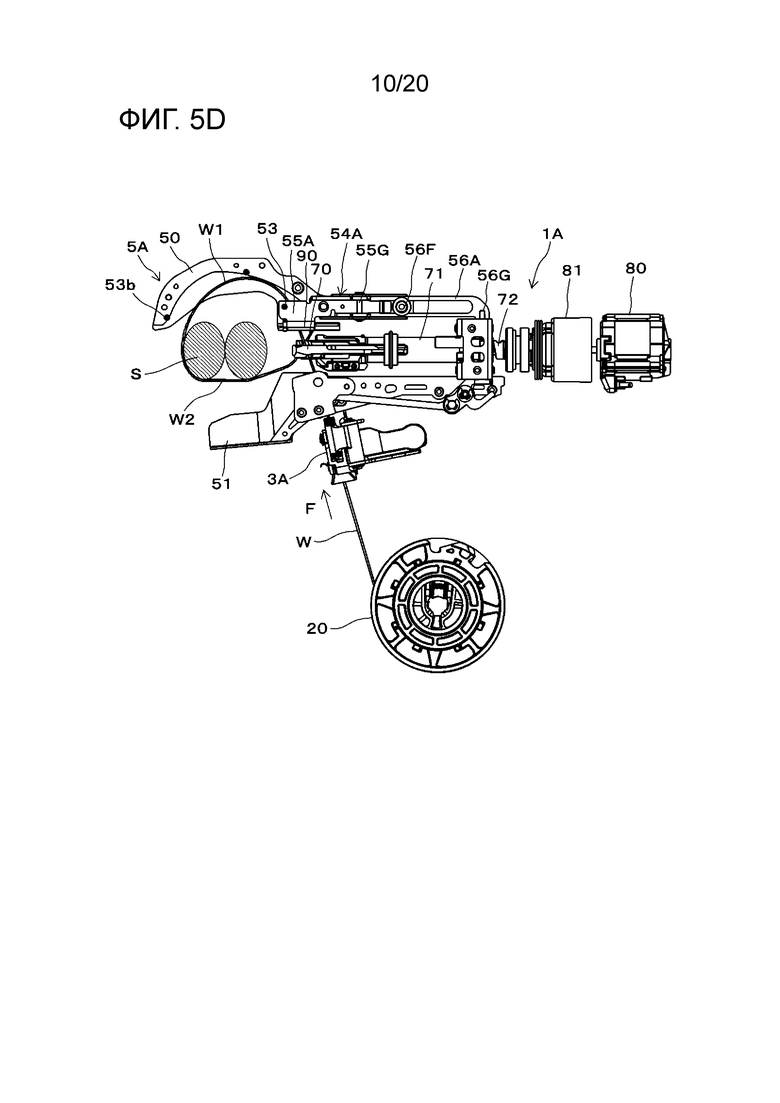
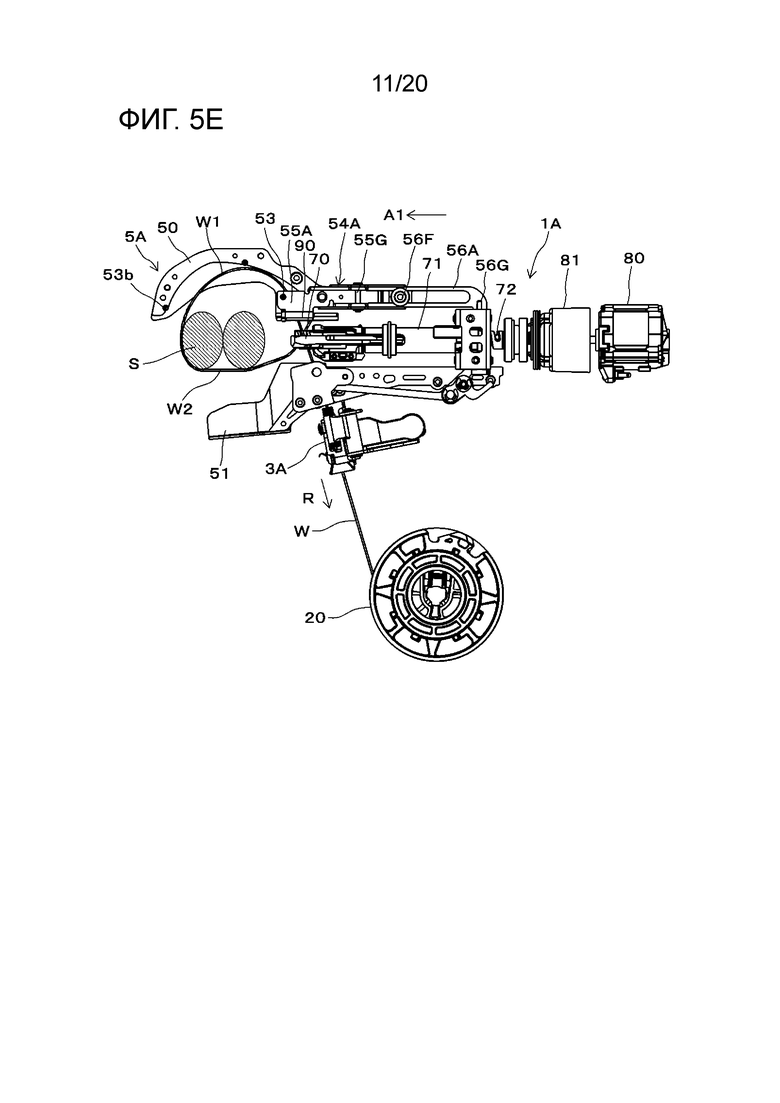
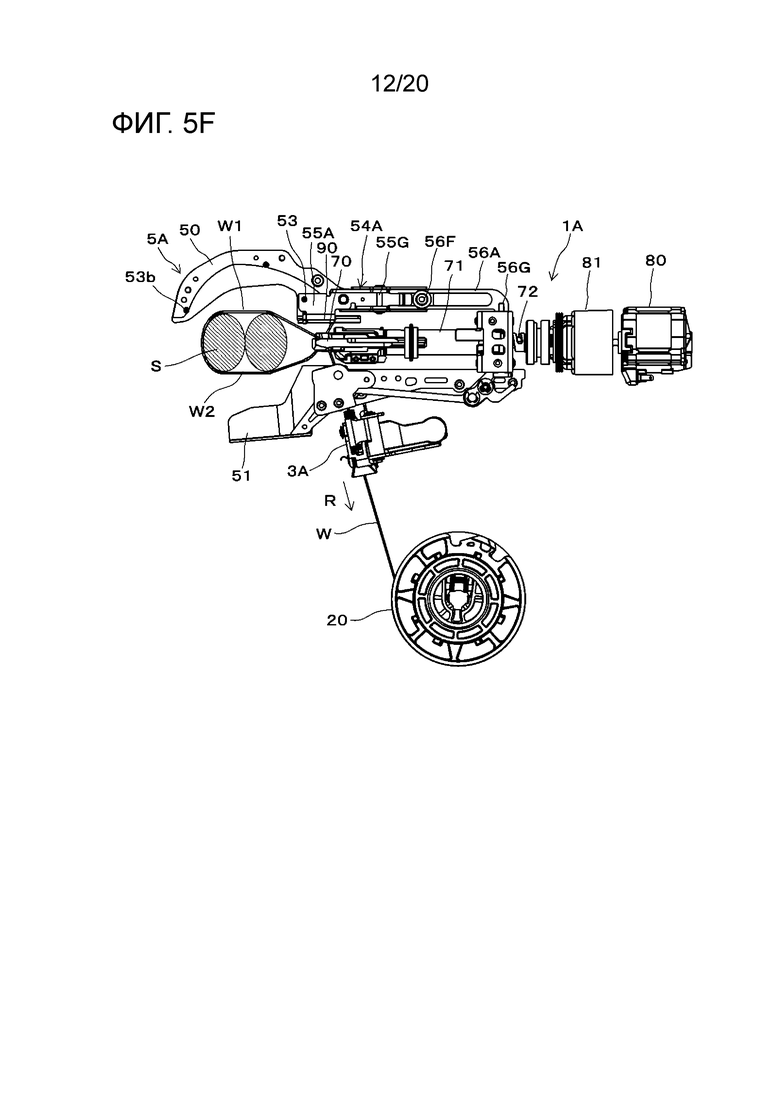
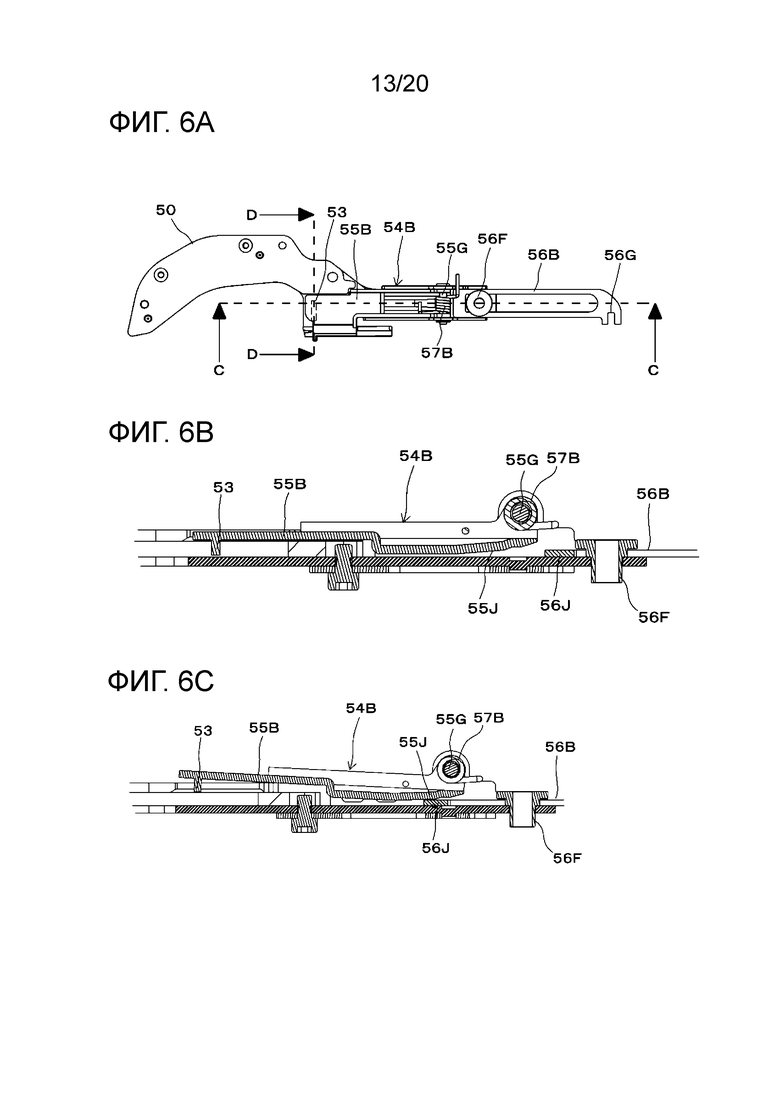
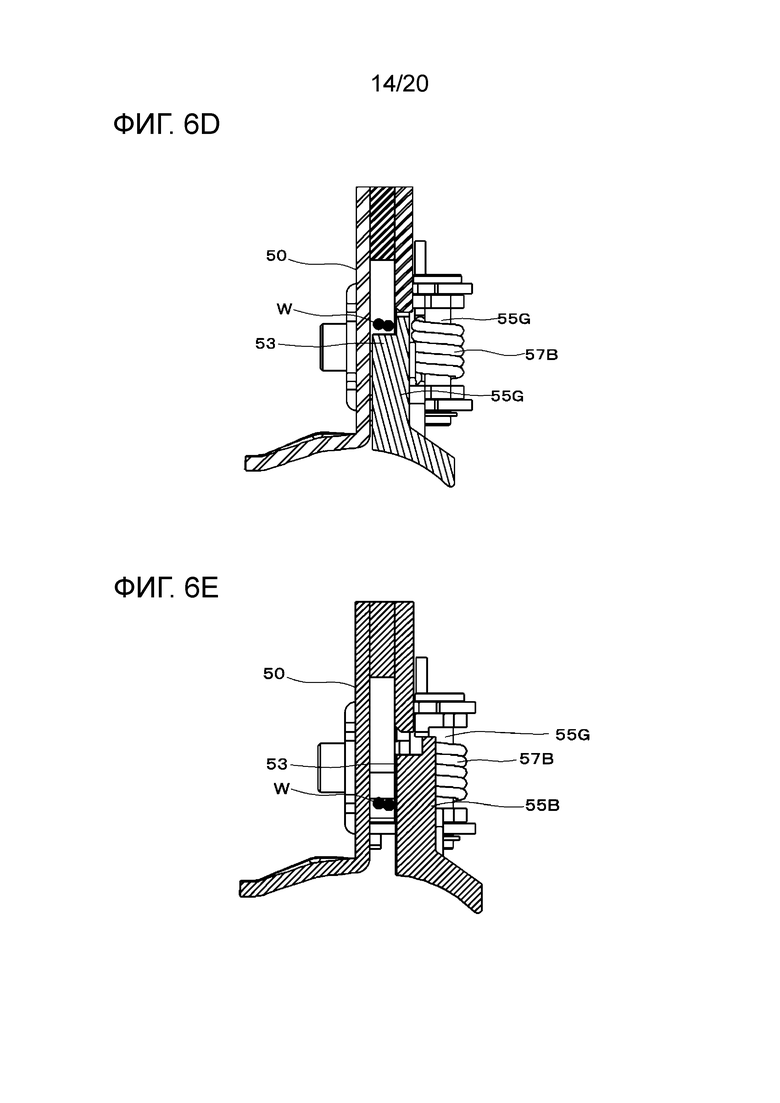
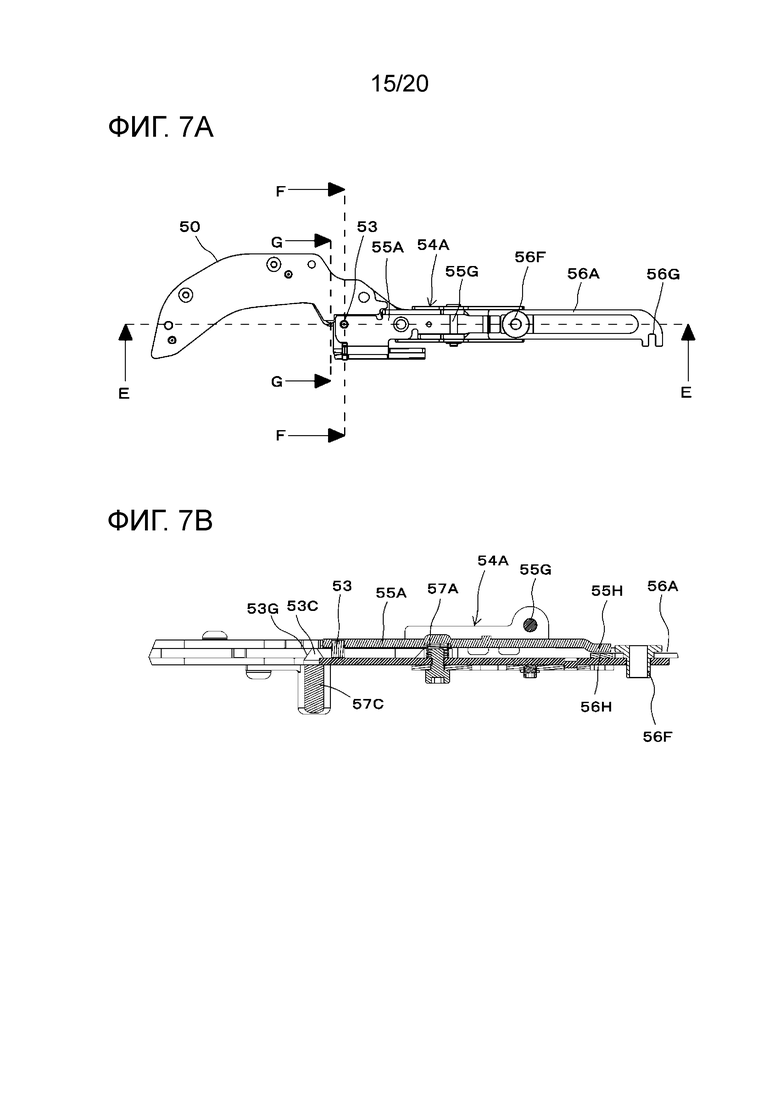
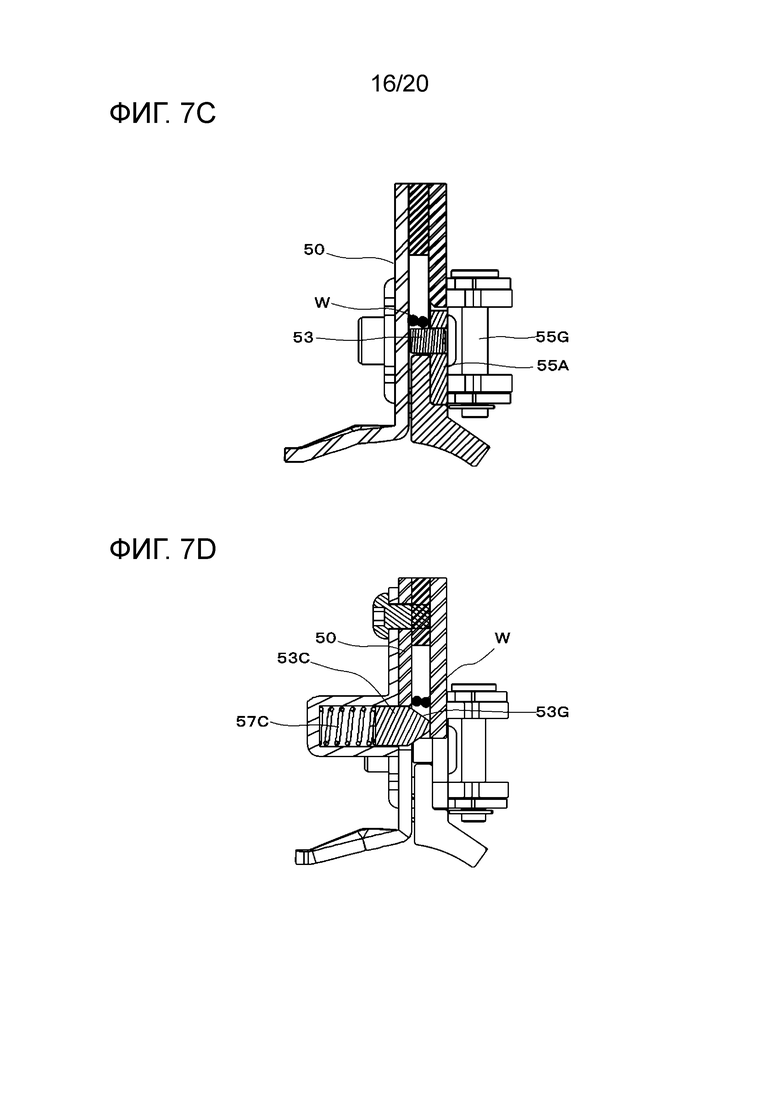
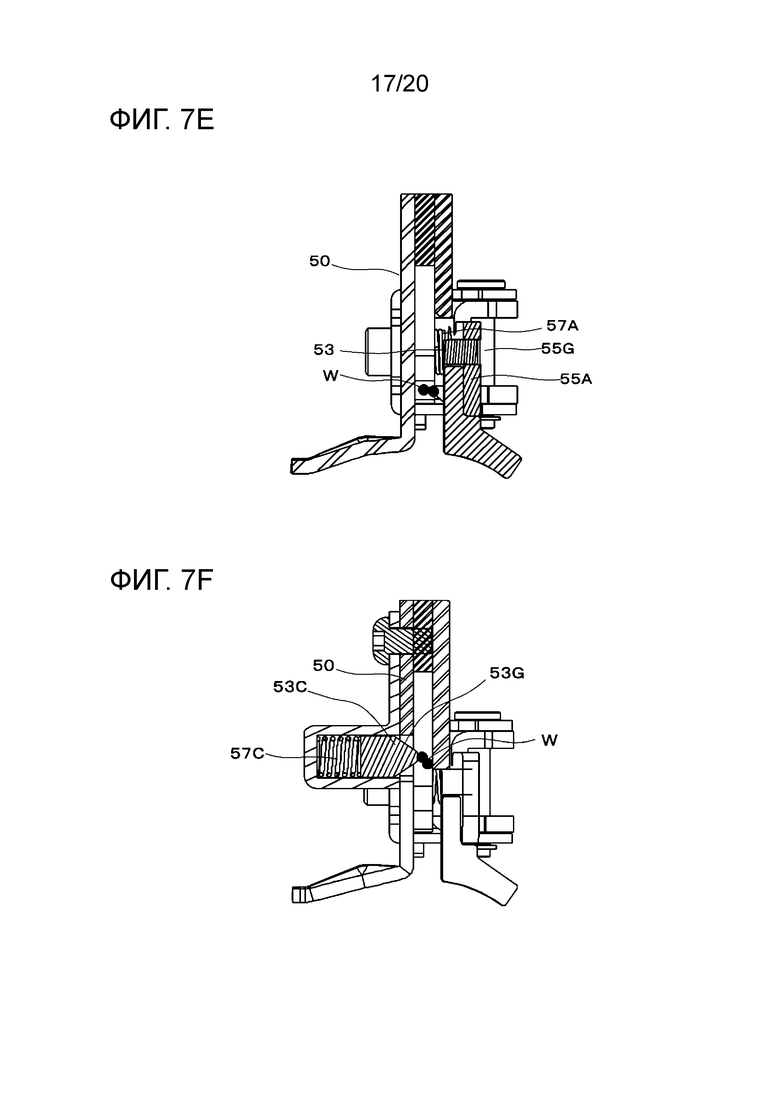
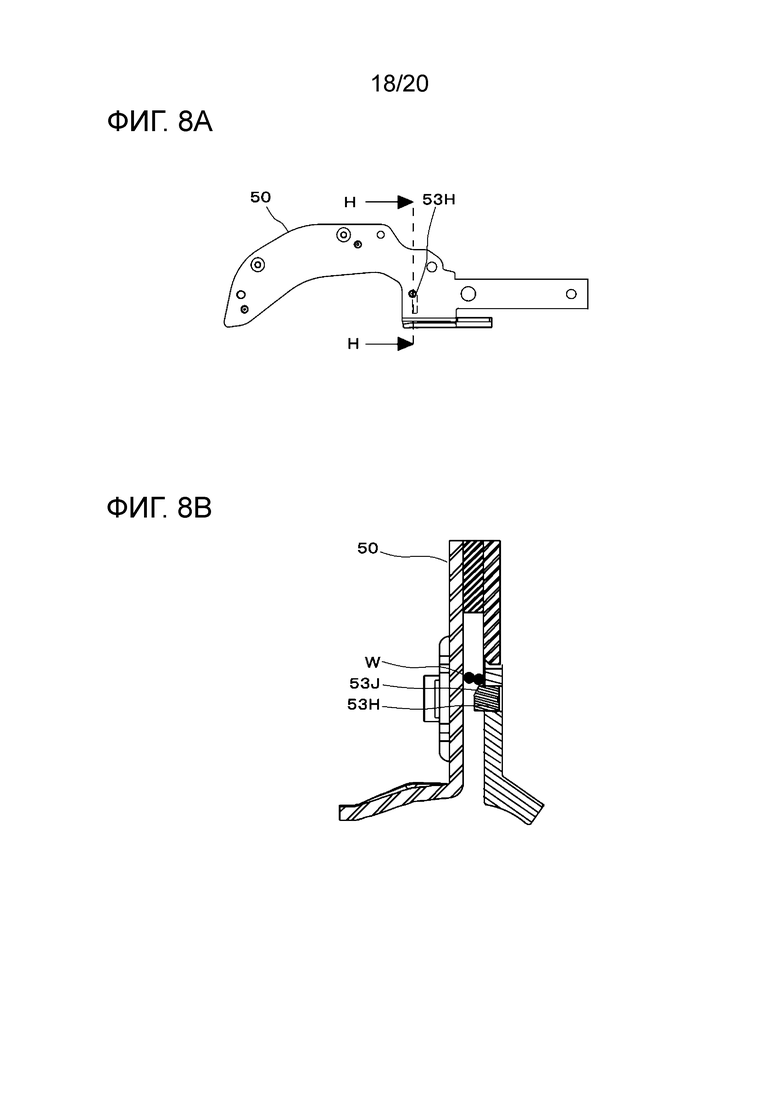
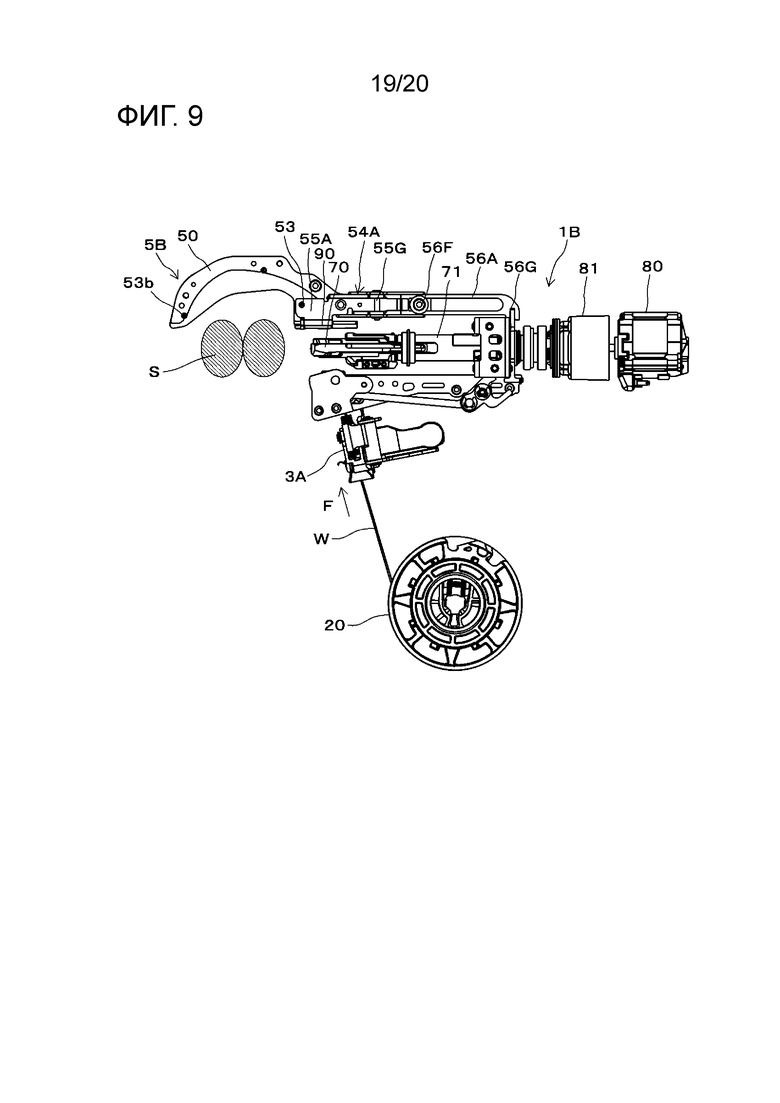
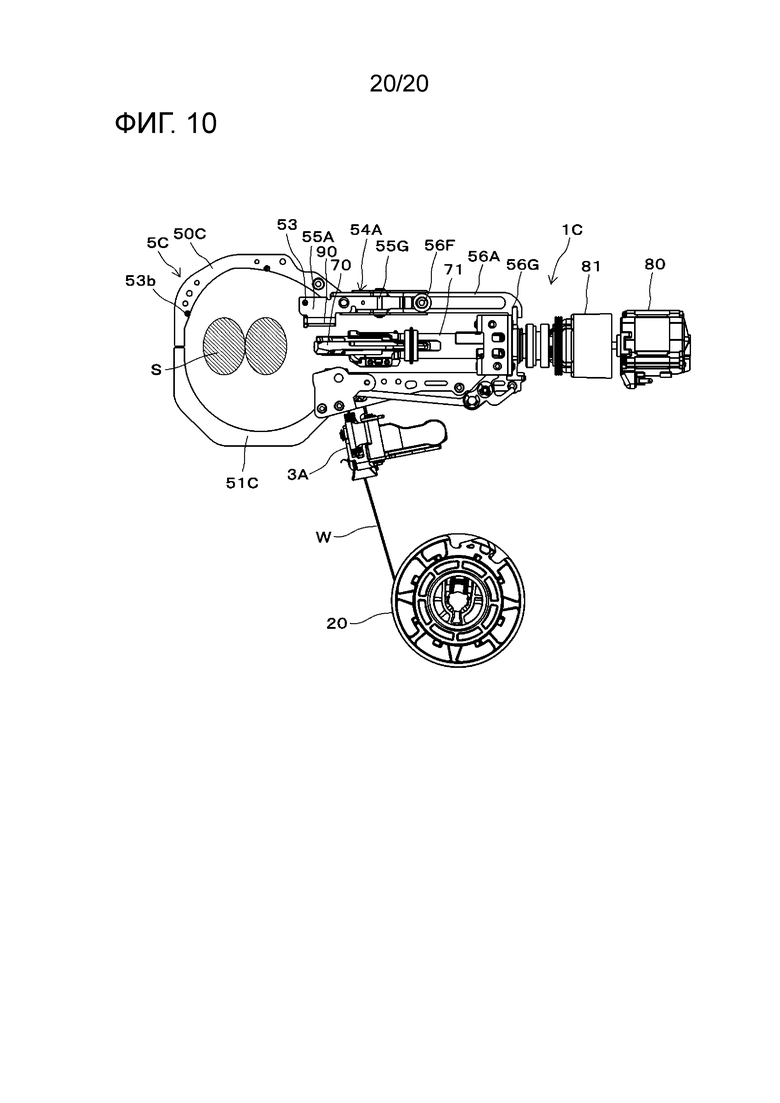
Обвязочная машина содержит блок подачи проволоки, выполненный с возможностью подачи проволоки; загибочную направляющую, выполненную с возможностью загибания проволоки, которая подается в прямом направлении посредством блока подачи проволоки; и обвязочный блок, выполненный с возможностью скручивания проволоки, подаваемой в обратном направлении посредством блока подачи проволоки, и наматывания на объект. Обвязочный блок содержит корпус для зацепления проволоки, выполненный с возможностью зацепления концевой стороны верхушки проволоки, подаваемой в прямом направлении посредством блока подачи проволоки, загибаемой посредством загибочной направляющей и наматываемой вокруг объекта. Обвязочная машина содержит натягивающий блок для натягивания, к объекту, участка проволоки на второй стороне, расположенной на противоположной стороне по отношению к загибочной направляющей относительно объекта, раньше участка проволоки на первой стороне, расположенной на загибочной направляющей проволоки, намотанной вокруг объекта и зацепленной на конце верхушки. В направлении вдоль пути подачи проволоки участок проволоки на первой стороне расположен ближе к блоку подачи проволоки, чем участок проволоки на второй стороне, а участок проволоки на второй стороне расположен ближе к зацепленной позиции проволоки, зацепленной на конце верхушки, чем участок проволоки на первой стороне. Обеспечивается создание достаточного натяжения проволоки при ее подаче назад при обвязывании арматурных стержней. 9 з.п. ф-лы, 31 ил.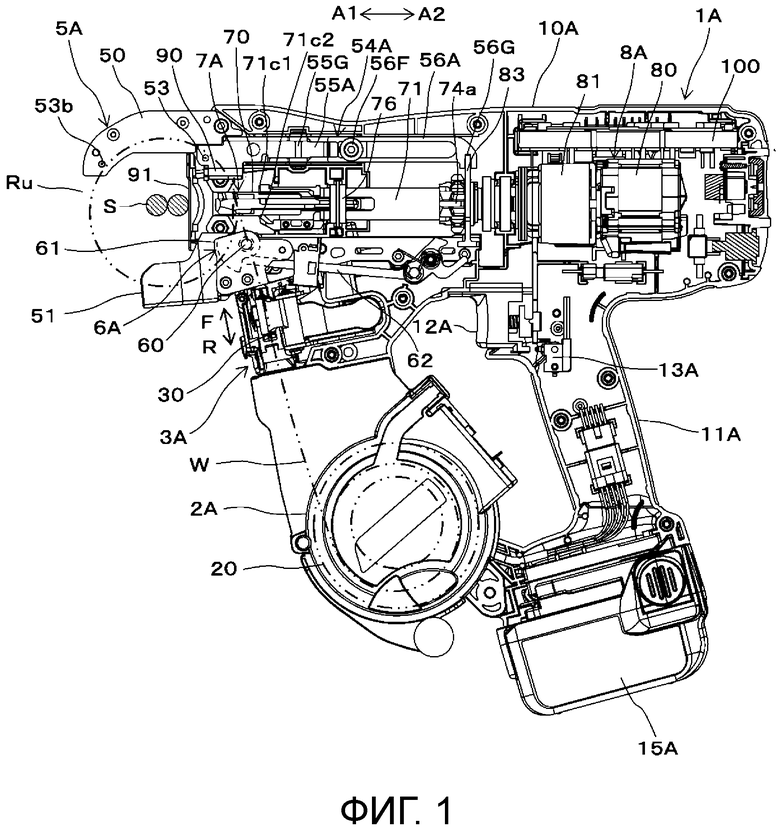
1. Обвязочная машина, содержащая:
блок подачи проволоки, выполненный с возможностью подачи проволоки;
загибочную направляющую, выполненную с возможностью загибания проволоки, которая подается в прямом направлении посредством блока подачи проволоки; и
обвязочный блок, выполненный с возможностью скручивания проволоки, подаваемой в обратном направлении посредством блока подачи проволоки, и наматывания на объект,
при этом обвязочный блок содержит корпус для зацепления проволоки, выполненный с возможностью зацепления концевой стороны верхушки проволоки, подаваемой в прямом направлении посредством блока подачи проволоки, загибаемой посредством загибочной направляющей и наматываемой вокруг объекта,
при этом обвязочная машина содержит натягивающий блок для натягивания, к объекту, участка проволоки на второй стороне, расположенной на противоположной стороне по отношению к загибочной направляющей относительно объекта, раньше участка проволоки на первой стороне, расположенной на загибочной направляющей проволоки, намотанной вокруг объекта и зацепленной на конце верхушки, и
при этом в направлении вдоль пути подачи проволоки участок проволоки на первой стороне расположен ближе к блоку подачи проволоки, чем участок проволоки на второй стороне, а участок проволоки на второй стороне расположен ближе к зацепленной позиции проволоки, зацепленной на конце верхушки, чем участок проволоки на первой стороне.
2. Обвязочная машина по п. 1, дополнительно содержащая индукционную направляющую, выполненную с возможностью направления проволоки, загибаемой посредством загибочной направляющей, в обвязочный блок,
при этом натягивающий блок натягивает, к объекту, участок проволоки на второй стороне вдоль индукционной направляющей раньше участка проволоки на первой стороне вдоль загибочной направляющей.
3. Обвязочная машина по п. 1, в которой натягивающий блок выполнен с возможностью удержания участка проволоки на первой стороне с разнесением от объекта.
4. Обвязочная машина по любому из пп. 1-3, в которой натягивающий блок содержит:
направляющий элемент, предназначенный для загибочной направляющей и выполненный с возможностью направления проволоки, подаваемой в прямом направлении посредством блока подачи проволоки, загибаемой посредством загибочной направляющей и наматываемой вокруг объекта, и
подвижный механизм направляющего элемента, выполненный с возможностью перемещения направляющего элемента между направляющей позицией, в которой направляющий элемент может направлять проволоку, намотанную вокруг объекта, и убранной позицией, убранной из направляющей позиции, и
при этом натягивающий блок перемещает направляющий элемент из направляющей позиции в убранную позицию посредством подвижного механизма направляющего элемента после начала операции подачи проволоки в обратном направлении посредством блока подачи проволоки.
5. Обвязочная машина по п. 4, в которой направляющая позиция находится на радиально внутренней стороне пути подачи проволоки, намотанной вокруг объекта, и
убранная позиция находится поперечно вне пути подачи проволоки.
6. Обвязочная машина по п. 4 или 5, в которой направляющий элемент перемещается из направляющей позиции в убранную позицию посредством подвижного механизма направляющего элемента, в комбинации с операцией обвязочного блока скручивания проволоки.
7. Обвязочная машина по любому из пп. 4-6, в которой направляющий элемент перемещается из направляющей позиции в убранную позицию посредством подвижного механизма направляющего элемента, на основе, по меньшей мере, одного из истечения времени, величины подачи проволоки и нагрузки, прикладываемой к проволоке, после начала операции подачи проволоки в обратном направлении посредством блока подачи проволоки.
8. Обвязочная машина по любому из пп. 4-6, в которой проволока подается в прямом направлении посредством блока подачи проволоки до того, как направляющий элемент перемещается из направляющей позиции в убранную позицию посредством подвижного механизма направляющего элемента после начала операции подачи проволоки в обратном направлении посредством блока подачи проволоки.
9. Обвязочная машина по любому из пп. 4-6, дополнительно содержащая индукционную часть, предназначенную для направляющего элемента и выполненную с возможностью формирования усилия перемещения направляющего элемента из направляющей позиции в убранную позицию по мере того, как проволока, подаваемая в обратном направлении посредством блока подачи проволоки, входит в контакт с ней.
10. Обвязочная машина по п. 1 или 2, в которой натягивающий блок содержит направляющий элемент, предназначенный для загибочной направляющей и выполненный с возможностью направления проволоки, подаваемой в прямом направлении посредством блока подачи проволоки, загибаемой посредством загибочной направляющей и наматываемой вокруг объекта, и
при этом направляющий элемент содержит индукционную часть, выполненную с возможностью направления проволоки, намотанной вокруг объекта, в радиально внутреннюю сторону контура, сформированного посредством проволоки, намотанной вокруг объекта, по мере того, как проволока, подаваемая в обратном направлении посредством блока подачи проволоки, входит в контакт с ним.
| EP 3342956 B1, 18.09.2019 | |||
| EP 3342953 B1, 02.10.2019 | |||
| ОБВЯЗОЧНАЯ МАШИНА | 2016 |
|
RU2689108C1 |
| СВЯЗЫВАЮЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2564184C2 |

