Область техники, к которой относится изобретение
Изобретение относится к ракетно-космической области, в частности, к жидкостным ракетным двигателям (ЖРД) и предназначено для использования при их экспериментальной доводке, эксплуатации и модернизации.
Уровень техники
Известен способ контроля характеристик агрегатов жидкостного ракетного двигателя (ЖРД) при огневом испытании по патенту № RU 2750874 С1, МПК G01M 15/14 (2006.01), G02B 17/02 (2006.01), F02K (2006.01) от 24.07.2020, основанный на использовании математической модели ЖРД для контроля отклонений значений характеристик агрегатов, реализовавшихся при огневом стендовом испытания двигателя, от их эталонных значений. Контроль осуществляют на каждом стационарном режиме испытания и значения характеристик агрегатов определяют расчетным путем по математической модели двигателя, скорректированной по результатам текущих измерений параметров двигателя.
Известен также способ локализации неисправности жидкостного ракетного двигателя при огневом испытании (патент № RU 2750875 С1 СПК G05B 17/02(2021/02) от 24.07.2021. В этом способе для формирование диагностических признаков возникновения и локализации неисправности используется математическая модель нормально функционирующего двигателя, корректируемая на каждом режиме огневого испытания двигателя, и прямо измеряемые параметры рабочих процессов двигателя (давления, расходов, температур компонентов топлива, температуры продуктов сгорания, положения приводов регулирующих органов). Для локализации неисправности используется не менее двух надежно измеряемых параметров двигателя и диагностические признаки неисправности формируют следующими действиями. В момент времени возникновения неисправности в исходную систему уравнений, описывающую процессы в нормально функционирующем двигателе, подставляют заранее выбранную совокупность измеренных значений параметров, исключают из системы уравнений столько уравнений, сколько параметров содержится в выбранной совокупности, решают укороченную систему уравнений, ее решение подставляют в исключенные уравнения и контролируют диагностические признаки - рассогласования левых и правых частей каждого из исключенных уравнений. Если один или несколько диагностических признаков выходят за границы заданных допустимых отклонений (допусков), то принимается решение о неисправности в одном или нескольких элементах конструкции двигателя, описываемых этими уравнениями. Если все диагностические признаки выходят за границы допусков, то принимается решение, что неисправность не локализована, и процедура исключения повторяется для следующих уравнений, в число которых должна входить и часть уравнений, участвующих в предыдущей процедуре.
На основании обработки полученных признаков по специальным алгоритмам формируют сигнал (команду) на систему управления двигателем, в результате воздействия которой на двигатель производится его выключение или перевод на безопасный режим работы.
Этот способ можно рассматривать как прототип, так как в нем используются математическая модель, представленная в виде системы уравнений, описывающей рабочие процессы в нормально функционирующем двигателе, и измеряемые параметры, а локализация неисправности определяется по рассогласованию взаимосвязи параметров в соответствующих уравнениях.
Однако, для реализации способа необходимо решать системы уравнений математической модели большой размерности и перебирать достаточно большое количество вариантов их формирования в процессе исключения ряда уравнений из исходной системы с помощью всех измеряемых параметров.
Раскрытие изобретения
Задача предлагаемого изобретения состоит в разработке способа локализации неисправности в двигателе, который минимизирует время процедуры локализации неисправности при огневом испытании в режиме реального времени.
Технический результат заключается в снижении затрат времени на вычислительные процедуры за счет того, что при локализации неисправности в каждом цикле контроля не нужно решать систему уравнений математической модели, что обеспечивает локализацию неисправности ЖРД в режиме реального времени испытания и оперативность формирования сигнала для органов управления двигателем в случае принятия решения о выключении двигателя или переводе на безопасный режим работы.
Это достигается за счет того, что способ локализации неисправности жидкостного ракетного двигателя при огневом испытании, включающий вывод двигателя на стационарный режим работы, измерение текущих параметров двигателя, определение на начальном участке стационарного режима среднеарифметических значений измеряемых параметров, принятие этих значений как эталонные, коррекцию по ним математической модели нормально функционирующего двигателя, сравнение при последующих измерениях значений параметров с их эталонными значениями, а также фиксацию момента времени возникновения неисправности, при этом используют два надежно измеряемых параметра двигателя, например, xi xj, отклонения Δi и Δj которых от своих среднеарифметических значений, полученных в начале стационарного режима на заданном отрезке времени, первыми вышли за границы своих допусков. Момент времени выхода последнего из них за границу допуска фиксируют как момент времени возникновения неисправности. В этот же момент времени определяют коэффициент пропорциональности отклонений d:

Эталонные значения коэффициента пропорциональности d, соответствующие нормальной работе двигателя, формируют следующим способом. Исходную систему уравнений математической модели, описывающую процессы в нормально функционирующем двигателе, вида ƒk(x1, х2,…, xN)=0, k=1, 2,…, N, линеаризуют в малых отклонениях Δх, т.е. представляют ее в виде:
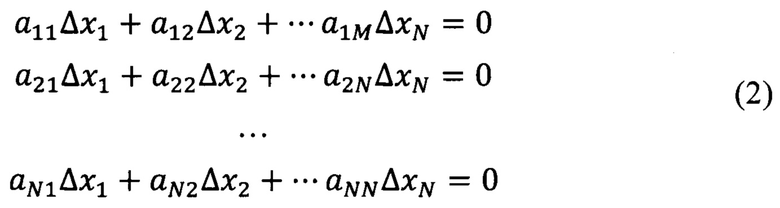
где a(.) - коэффициенты линеаризации, и из главного определителя
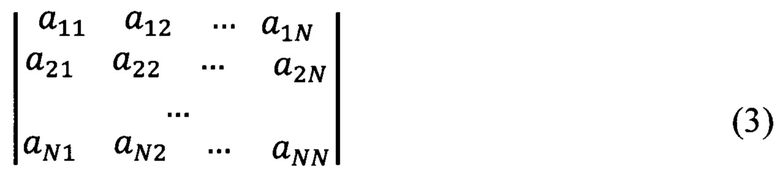
определяют миноры (определители) Jni и Jnj. Например, при i=1 и j=2:
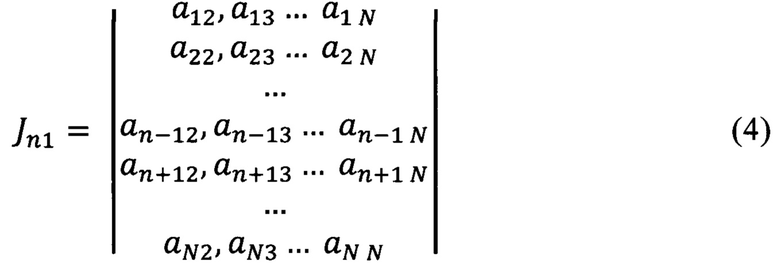
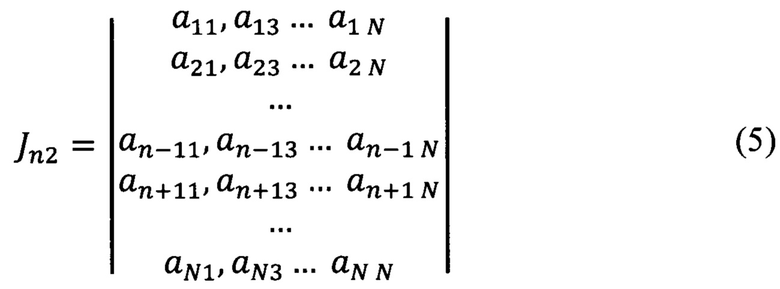
- и определяют эталонные значения Еп коэффициента пропорциональности d(l):

Диагностические признаки Dn локализации неисправности определяют как отклонения коэффициентов пропорциональности d от эталонных значений En:

Если один или несколько диагностических признаков (6) находятся в заданных допустимых границах, то по номерам п определяют одно или несколько уравнений, соответствующих контуру двигателя, содержащему неисправность.
После завершения процедуры локализации неисправности двигатель переводят в режим останова или безопасной работы. Если все диагностические признаки (6) выходят за границы допуска, то принимается решение, что неисправность не локализована.
Осуществление изобретения
Способ осуществляют следующими действиями.
1 Двигатель в процессе огневого испытания выводят на заданный стационарный режим работы и измеряют текущие значения параметров двигателя  , М - количество измеряемых параметров, включенных в систему уравнений математической модели нормально функционирующего двигателя.
, М - количество измеряемых параметров, включенных в систему уравнений математической модели нормально функционирующего двигателя.
2 На стационарном режиме на отрезке времени Т0 от начала режима определяют среднеарифметические значения измеряемых параметров, принимают эти значения как эталонные  и по ним корректируют математическую модель нормально функционирующего двигателя.
и по ним корректируют математическую модель нормально функционирующего двигателя.
3 В моменты времени Т0+k⋅Δt, где Δt - дискретность измерений по времени, k=1, 2,…, определяют отклонения  текущих значений измеряемых параметров от их эталонных значений
текущих значений измеряемых параметров от их эталонных значений
 , q=1, 2,…, М,
, q=1, 2,…, М,
и, если какие-либо два из этих отклонений
 ; i, j=1, 2,…, N
; i, j=1, 2,…, N
первыми выйдут за границы своих допусков, то момент времени Тн выхода последнего из них фиксируют как момент времени возникновения неисправности и начала процедуры ее локализации.
4 Для локализации неисправности:
4.1 В момент времени Тн определяют коэффициент пропорциональности d отклонений  и
и  по формуле (1).
по формуле (1).
4.2 Решают систему уравнений (2) скорректированной математической модели нормально функционирующего двигателя и определяют эталонные отношения коэффициентов пропорциональности, используя формулы (4, 5, 6).
4.3 Определяют диагностические признаки Dn, n=1, 2,…, N локализации неисправности по формуле (6) и сравниваю из с допустимыми значениями En:
Dn=|En-d|
4.4 Если один или несколько диагностических признаков Dn находятся в заданных допустимых границах, то по номерам п определяют одно или несколько уравнений математической модели, соответствующих контуру двигателя, содержащему неисправность.
5. После завершения процедуры локализации неисправности двигатель переводят в режим останова или безопасной работы.
Для иллюстрации предлагаемого способа локализации неисправности при огневом испытании ЖРД с вытеснительной подачей топлива в камеру сгорания на стационарном режиме работы. Система линеаризованных уравнений математической модели имеет следующий вид:
 - тракт окислителя;
- тракт окислителя;
 - тракт горючего;
- тракт горючего;
 - камера,
- камера,
где Δрк - приращение давления в камере сгорания;  - приращение расхода окислителя;
- приращение расхода окислителя;  - приращение расхода горючего; а1,…, а4 - коэффициенты линеаризации.
- приращение расхода горючего; а1,…, а4 - коэффициенты линеаризации.
Если на испытании измеряют расходы компонентов топлива  , то при возникновении неисправности определяют коэффициент пропорциональности их отклонений (7):
, то при возникновении неисправности определяют коэффициент пропорциональности их отклонений (7):

Определитель системы уравнений имеет вид
а эталонные значения для при неисправностях в 1), 2), 3), в соответствии с (5) определяются по формулам:

Пользуясь диагностическими признаками D (7), неисправность можно определить в каждом из трактов двигателя, описываемых отдельными уравнениями 1), 2), 3): и в тракте подачи окислителя, и в тракте подачи горючего, и в камере. Это объясняется тем, что, если, например, неисправность отобразилась в изменении коэффициента а1? входящего только в уравнения 1), то диагностические признаки D2 и D3, полученные путем сравнения коэффициента пропорциональности d (8) с эталонами Е2 и Е3 (9), должны быть не в допуске, так как только выражения для Е2 и Е3 содержат а1.
Для локализации неисправности можно использовать следующую таблицу
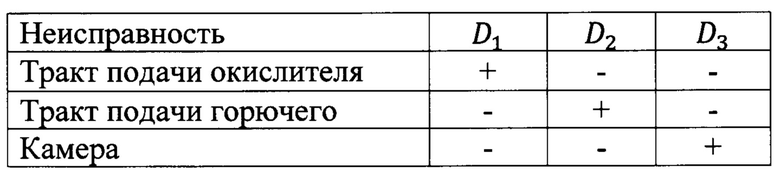
В таблице символ «+» означает, что диагностический признак D (7) в допуске, «- » - не в допуске.
Другой пример. Если на испытании измеряют давление в камере сгорания  и расход окислителя
и расход окислителя  , то при возникновении неисправности определяют коэффициент пропорциональности их отклонений (1)
, то при возникновении неисправности определяют коэффициент пропорциональности их отклонений (1)
Эталонные значения для d в соответствии с (4, 5, 6) определяют по формулам:
 , Е2=-а1, Е3=-а1,
, Е2=-а1, Е3=-а1,
и так как Е2=Е3=- al, то неисправность можно определить в тракте подачи окислителя (уравнение 1)) или в контуре «тракт горючего + камера сгорания» (объединение уравнений 2) и 3)).
Промышленная применимость
Предлагаемый способ локализации неисправности ЖРД обеспечивает достоверность локализации неисправности ЖРД и может быть эффективно применен при экспериментальной доводке, эксплуатации и модернизации ЖРД производства АО «НПО Энергомаш имени академика В.П. Глушко».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ функционального диагностирования жидкостного ракетного двигателя при огневом испытании | 2020 |
|
RU2781738C2 |
| Способ локализации неисправности жидкостного ракетного двигателя при огневом испытании | 2020 |
|
RU2750875C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ НАСОСОВ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2021 |
|
RU2791147C1 |
| Способ контроля характеристик агрегатов жидкостного ракетного двигателя при огневом испытании | 2020 |
|
RU2750874C1 |
| Способ коррекции математической модели жидкостного ракетного двигателя | 2022 |
|
RU2820905C2 |
| Способ контроля технического состояния жидкостного ракетного двигателя многократного использования в составе возвращаемой ступени ракеты-носителя | 2022 |
|
RU2804438C1 |
| Способ коррекции математической модели жидкостного ракетного двигателя | 2020 |
|
RU2749497C1 |
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2009 |
|
RU2393450C1 |
| Способ адаптивной настройки контролируемых параметров системы аварийной защиты жидкостного ракетного двигателя на первое огневое испытание | 2022 |
|
RU2800833C1 |
| Способ контроля технического состояния жидкостного ракетного двигателя на переходных режимах стендового испытания | 2020 |
|
RU2758781C1 |
Изобретение относится к ракетно-космической области, в частности к жидкостным ракетным двигателям, и предназначено для использования при их экспериментальной доводке, эксплуатации и модернизации. При фиксации момента времени возникновения неисправности проводится ее локализация. Для этого определяют отклонения текущих значений измеряемых параметров от эталонных значений. Если какие-либо два из этих отклонений Δi и Δj первыми выйдут за границы своих допусков, момент времени выхода последнего из них фиксируют как момент времени возникновения неисправности. Определяют коэффициент пропорциональности  , линеаризуют систему уравнений математической модели и определяют эталонные значения коэффициента пропорциональности:
, линеаризуют систему уравнений математической модели и определяют эталонные значения коэффициента пропорциональности:  n=1, 2,…, N, где N - количество уравнений, Jni, Jnj - миноры главного определителя линеаризованной системы уравнений математической модели; n - номер строки определителя, соответствующий номеру уравнения i, j - номер столбца в главном определителе, соответствующие номерам переменных, которые первыми вышли за границы своих допусков. Определяют отклонения Dn=|En-d| . Если эти отклонения находятся в заданных допустимых границах, то по номерам n определяют одно или несколько уравнений, соответствующих контуру двигателя, содержащему неисправность, и двигатель переводят в режим останова или безопасной работы. При применении заявленного способа достигается снижение затрат времени на вычислительные процедуры за счет того, что при локализации неисправности в каждом цикле контроля не нужно решать систему уравнений математической модели, что обеспечивает локализацию неисправности ЖРД в режиме реального времени испытания и оперативность формирования сигнала для органов управления двигателем в случае принятия решения о выключении двигателя или переводе на безопасный режим работы.
n=1, 2,…, N, где N - количество уравнений, Jni, Jnj - миноры главного определителя линеаризованной системы уравнений математической модели; n - номер строки определителя, соответствующий номеру уравнения i, j - номер столбца в главном определителе, соответствующие номерам переменных, которые первыми вышли за границы своих допусков. Определяют отклонения Dn=|En-d| . Если эти отклонения находятся в заданных допустимых границах, то по номерам n определяют одно или несколько уравнений, соответствующих контуру двигателя, содержащему неисправность, и двигатель переводят в режим останова или безопасной работы. При применении заявленного способа достигается снижение затрат времени на вычислительные процедуры за счет того, что при локализации неисправности в каждом цикле контроля не нужно решать систему уравнений математической модели, что обеспечивает локализацию неисправности ЖРД в режиме реального времени испытания и оперативность формирования сигнала для органов управления двигателем в случае принятия решения о выключении двигателя или переводе на безопасный режим работы.
Способ локализации неисправности жидкостного ракетного двигателя при огневом испытании, включающий вывод двигателя на стационарный режим работы, измерение текущих значений параметров двигателя, определение на начальном участке стационарного режима среднеарифметических значений измеренных параметров, принятие этих значений как эталонные, коррекцию по ним математической модели нормально функционирующего двигателя, сравнение при последующих измерениях значений параметров с их эталонными значениями, а также фиксацию момента времени возникновения неисправности, отличающийся тем, что для фиксации момента времени возникновения неисправности определяют отклонения текущих значений измеряемых параметров от эталонных значений и, если какие-либо два из этих отклонений Δi и Δj первыми выйдут за границы своих допусков, момент времени выхода последнего из них фиксируют как момент времени возникновения неисправности, определяют коэффициент пропорциональности  линеаризуют систему уравнений математической модели и определяют эталонные значения коэффициента пропорциональности:
линеаризуют систему уравнений математической модели и определяют эталонные значения коэффициента пропорциональности:  n=1, 2,…, N, где N - количество уравнений, Jni, Jnj - миноры главного определителя линеаризованной системы уравнений математической модели; n - номер строки определителя, соответствующий номеру уравнения i, j - номер столбца в главном определителе, соответствующие номерам переменных, которые первыми вышли за границы своих допусков, определяют отклонения Dn=|En-d|, и если эти отклонения находятся в заданных допустимых границах, то по номерам n определяют одно или несколько уравнений, соответствующих контуру двигателя, содержащему неисправность, и двигатель переводят в режим останова или безопасной работы.
n=1, 2,…, N, где N - количество уравнений, Jni, Jnj - миноры главного определителя линеаризованной системы уравнений математической модели; n - номер строки определителя, соответствующий номеру уравнения i, j - номер столбца в главном определителе, соответствующие номерам переменных, которые первыми вышли за границы своих допусков, определяют отклонения Dn=|En-d|, и если эти отклонения находятся в заданных допустимых границах, то по номерам n определяют одно или несколько уравнений, соответствующих контуру двигателя, содержащему неисправность, и двигатель переводят в режим останова или безопасной работы.
| Способ локализации неисправности жидкостного ракетного двигателя при огневом испытании | 2020 |
|
RU2750875C1 |
| Способ контроля характеристик агрегатов жидкостного ракетного двигателя при огневом испытании | 2020 |
|
RU2750874C1 |
| CA 2944120 A1, 08.10.2015 | |||
| CN 110082115 A, 02.08.2019. | |||

