Область техники, к которой относится изобретение
Изобретение относится к ракетно-космической области, в частности, жидкостным ракетным двигателям (ЖРД) и предназначено для использования при их экспериментальной доводке, эксплуатации и модернизации.
Уровень техники
Известен способ и устройство контроля параметра ракетного двигателя по патенту 2654310 МПК F02K 9/96, G05B 23/02, 2015 г. Он используется для анализа работы ЖРД в реальном времени испытания по диагностическим признакам, определяемым путем сравнения измеренных текущих значений параметров ЖРД с их пороговыми значениями, определенными в зависимости от режима работы двигателя, известной погрешности средств измерения контролируемых параметров, значений расчетных оценок этих параметров, выполненных, например, математическим моделированием, моделированием с использованием нейронной сети, обучающейся по результатам предыдущих испытаний и погрешности получения расчетных оценок. Недостаток этого способа заключается в отсутствии информативности измеряемых единичных для определения возникновения неисправности в двигателе, а тем более для ее локализации.
Известен способ контроля и диагностирования состояния пневмогидравлического объекта, патент РФ 2018900 МПК G05B 23/00 (1990.01), F15C 5/00 (1990.01) от 30.08.1994, работающего в экстремальных условиях. В этом способе циклически измеряют параметры в контрольных точках объекта, сравнивают их с расчетными пороговыми значениями и при выходе их за пороговые значения измеряют параметры в дополнительных контрольных точках, вычисляют по всем измеренным параметрам обобщенные характеристики пневмогидравлических узлов, составляющих объект, и сравнивают их с пороговыми значениями обобщенных характеристик пневмогидравлических узлов, проводя локализацию отказа. При этом, с целью повышения достоверности и чувствительности способа и сокращения времени локализации отказа, предварительно измеряют параметры в основных и дополнительных контрольных точках, определяют по измеренным значениям параметров реальные пороговые значения обобщенных характеристик пневмогидравлических узлов, составляющих объект, которые используют для локализации отказа.
Однако, при определении обобщенных характеристик не учитываются взаимосвязи между входящими в них параметрами, определяемые математической моделью. Поэтому для расчета этих характеристик привлекаются дополнительные, не связанные с конкретным экземпляром двигателя и с конкретным огневым испытанием данные, например, плотности компонентов. Все это снижает достоверность определения обобщенных характеристик.
Известен способ контроля и диагностирования состояния пневмогидравлического объекта, патент РФ №2133952, МПК G01M 15/00 (1995.01) от 27.07.1999, заключающийся в том, что диагностирование проводят поэтапно и на каждом этапе фиксируют очередность и направление выхода параметров за их пороговые уровни, в соответствии с которыми диагностируют неисправность, при этом в момент выхода первого из параметров за его пороговый уровень начинают отсчет контрольного интервала времени, в течение которого фиксируют количество параметров, вышедших за свои пороговые уровни, в случае выхода за пороговые уровни более одного параметра устанавливают факт неисправности и определяют дополнительные пороговые уровни измеряемых параметров, которые используют на следующем этапе диагностирования до полной локализации неисправности, а величины дополнительных пороговых уровней выбирают на основе измерений текущих значений параметров на момент распознавания неисправности на предыдущем уровне, причем в случае выхода за пороговые уровни и последующего возврата в пределы исходных пороговых уровней в течение контрольного интервала времени только одного из параметров принимают решение о его случайном выбросе, а в случае отсутствия возврата - решение об отказе датчика этого параметра.
Недостатком этого способа является необходимость до испытания определить направления выхода того или иного измеряемого параметра за пороговые значения при возникновении и развитии той или иной неисправности: как показывает практика огневых испытаний ЖРД, где и какая именно неисправность возникнет в двигателе и как она будет развиваться, зачастую непредсказуемо.
Известен также патент РФ №2 393 450, МПК G01M 15/14(2006.01), F02K 9/96(2006.02) от 27.06.2010 г., предлагающий алгоритм оценки технического состояния испытываемого ЖРД по диагностическим признакам, определяемым путем сравнения значений экспериментально полученных данных с их пороговыми значениями, определенными в зависимости от технологических отклонений комплектующих данного двигателя и программы испытания. Основным недостатком этого способа является то, что он позволяет фиксировать только те неисправности, которые связаны с негерметичностью газовых или жидкостных трактов двигателя, а диапазон изменения диагностических признаков зависит лишь от технологических особенностей сборки конкретного двигателя.
Тем не менее, этот способ может рассматриваться как прототип, наиболее близкий к предлагаемому, так как для его реализации используются диагностические признаки, формируемые на основе математической модели - уравнений, связывающих измеряемые и рассчитываемые параметры двигателя, а также технологические особенности сборки.
Раскрытие изобретения
Задача предлагаемого изобретения - повышение достоверности определения момента времени возникновения и локализация неисправности в ЖРД при его огневом испытании для предотвращения аварийных ситуаций, приводящих к разрушению материальной части двигателя и стенда. При этом недостатки, присущие прототипу устраняют с помощью формирования диагностических признаков возникновения и локализации неисправности с использованием математической модели нормально функционирующего двигателя, корректируемой на каждом режиме огневого испытания двигателя, и прямо измеряемых параметров рабочих процессов двигателя: давлений, расходов, температур компонентов топлива, температур продуктов сгорания, положений приводов регулирующих органов. На основании обработки полученных признаков по специальным алгоритмам формируют сигнал на систему управления двигателем, в результате воздействия которой на двигатель производится его выключение или перевод на безопасный режим работы.
Технический результат заключается в повышении достоверности диагноза, минимизации вероятности пропуска дефекта и ложного отключения двигателя за счет применения коррекции математической модели в начале каждого стационарного режима и введения поэтапного, многоуровневого контроля с использованием алгоритмов, подтверждающих правильность принятия решения на каждом уровне.
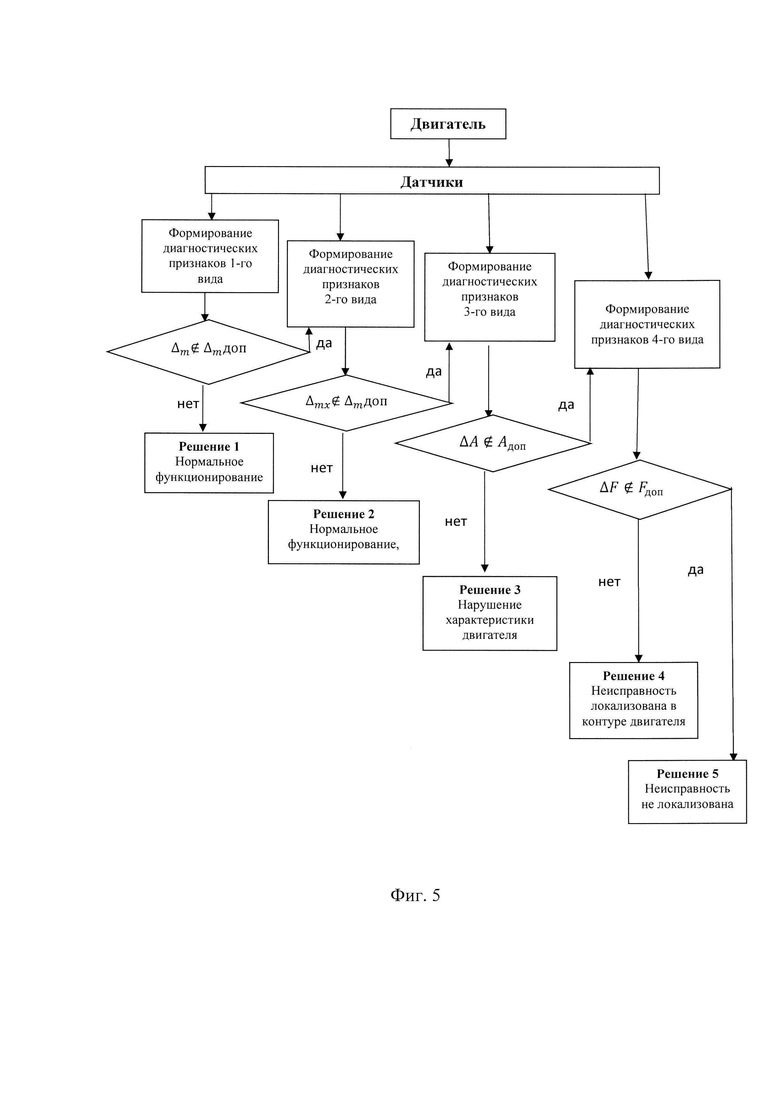
Для решения поставленной задачи предлагается способ функциональной диагностики жидкостного ракетного двигателя при огневом испытании, заключающийся в формировании диагностических признаков момента времени возникновения и локализации неисправности путем сравнения отклонений текущих измеренных в процессе огневого испытания параметров функционирования от их расчетных значений, полученных по математической модели нормально функционирующего двигателя, представленной в виде системы уравнений рабочих процессов и содержащей характеристики двигателя, полученные при автономных испытаниях агрегатов, отличающийся тем, что диагностирование проводят в следующей последовательности: на 1-м этапе в начале каждого стационарного режима двигателя выделяют интервал времени, на котором определяют средние значения измеряемых параметров, а в начале переходного режима определяют средние значения производных параметров по времени и принимают их как эталонные на контролируемом режиме, по этим значениям проводят коррекцию математической модели и принимают полученные из ее решения характеристики двигателя как эталонные, после чего, в последующих циклах измерений проводят контроль отклонения текущих измеренных значений параметров от эталонных и, если все эти отклонения в норме, то принимают решение, что двигатель функционирует нормально, в противном случае, фиксируют последовательно моменты времени пересечения границ допуска отклонений трех параметров от их эталонных значений, наибольший из этих моментов времени принимают как предполагаемый момент времени возникновения неисправности и для подтверждения этого решения переходят ко 2-му этапу, на котором в момент времени возникновения неисправности определяют отклонения измеренных значений параметров от расчетных по откорректированной на 1-ом этапе математической модели и, если все эти отклонения в норме, то принимают решение, что двигатель функционирует нормально, в противном случае, переходят к 3-му этапу, на котором локализуют неисправность в момент времени ее возникновения по отклонениям текущих расчетных значений характеристик двигателя от эталонных и, если одно из этих отклонений не в норме, принимают решение, что неисправность вызвала нарушение соответствующей характеристики двигателя и для подтверждения этого решения переходят к 4-му этапу, на котором локализуют неисправность по методу структурного исключения, и формируют сигнал системе управления для принятия решения о воздействии на двигатель с целью его выключения или перевода на безопасный режим работы.
Осуществление изобретения
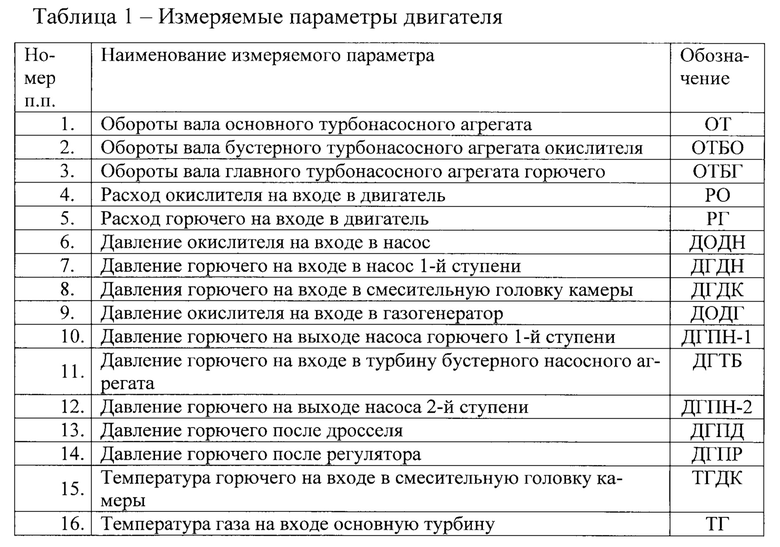
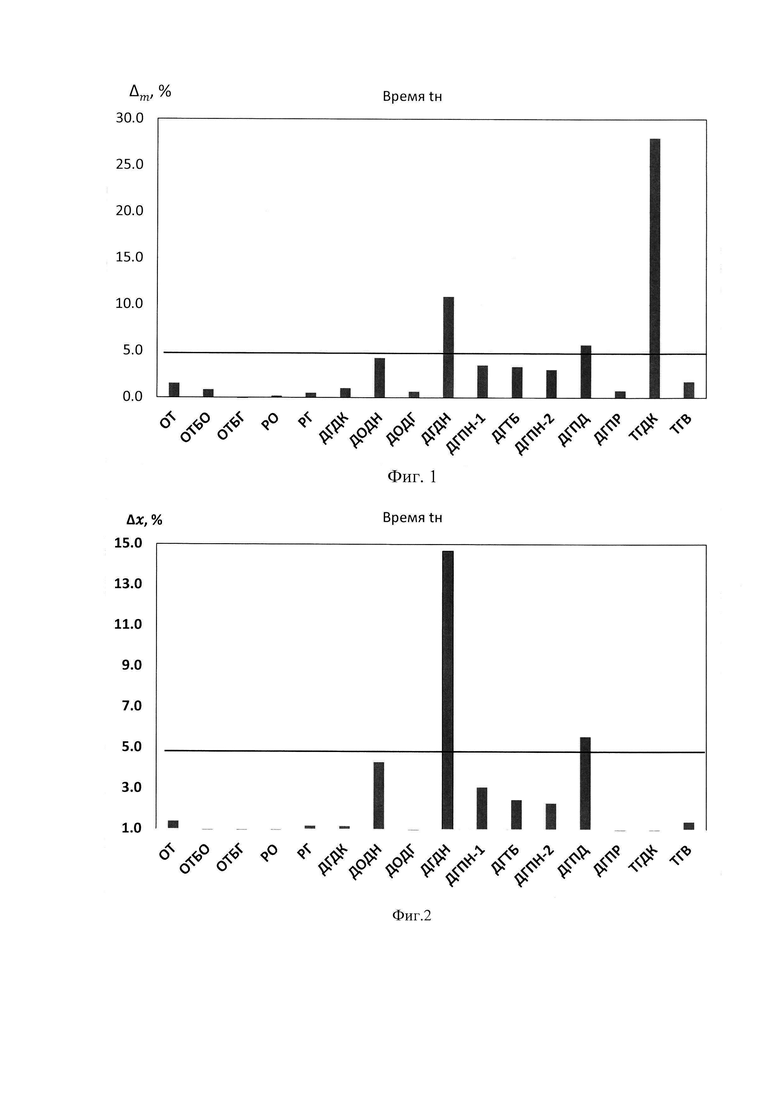
1- й этап. В начале каждого стационарного режима работы двигателя выделяют интервал времени, на котором определяют среднее значение каждого измеряемого параметра, а в начале переходного режима (дросселирования, форсирования) - среднее значение производной параметра по времени и принимают их как эталонные на контролируемом режиме. В этом же цикле измерений, используя эти значения проводят известным способом коррекцию математической модели и характеристики агрегатов также принимают за эталонные. В последующих циклах измерений проводят контроль диагностических признаков 1-го вида - Δm - отклонений текущих измеренных значений параметров от эталонных. Если три признака Δm последовательно пересекут границы своих допусков (на фиг. 1, 2, 3, 4 граница обозначена горизонтальной линией), и последний из них пересек границу допуска в момент времени tн, то наибольший из этих моментов времени фиксируют как момент времени возникновения неисправности и формируют сигнал системе управления о возможном ненормальном функционировании двигателя. Для подтверждения принятого решения переходят ко 2-му этапу контроля.
2-й этап. На этом этапе в момент времени tн как в момент времени возникновения предполагаемой неисправности, зафиксированный на 1-ом этапе, проводят контроль диагностических признаков 2-го вида Δх-отклонений измеренных значений параметров от их расчетных значений по математической модели - модели, скорректированной на 1-м этапе (фиг. 2). Наименования измеряемых параметров приведены в таблице 1.
Если все признаки 2-го вида в норме, то принимают решение, что двигатель функционирует нормально и отклонения признаков Δm, полученные на 1-м этапе не связаны с нарушением нормального функционирования, и продолжают процедуру диагностирования, описанную на 1-м. Если же какой-либо один из признаков 2-го вида превысит допустимые значения, формируют сигнал о подтверждении ненормального функционирования двигателя (данные, приведенные на фиг. 2, подтверждают наличие неисправности, выявленной на 1-м этапе) и переходят к 3-му этапу.
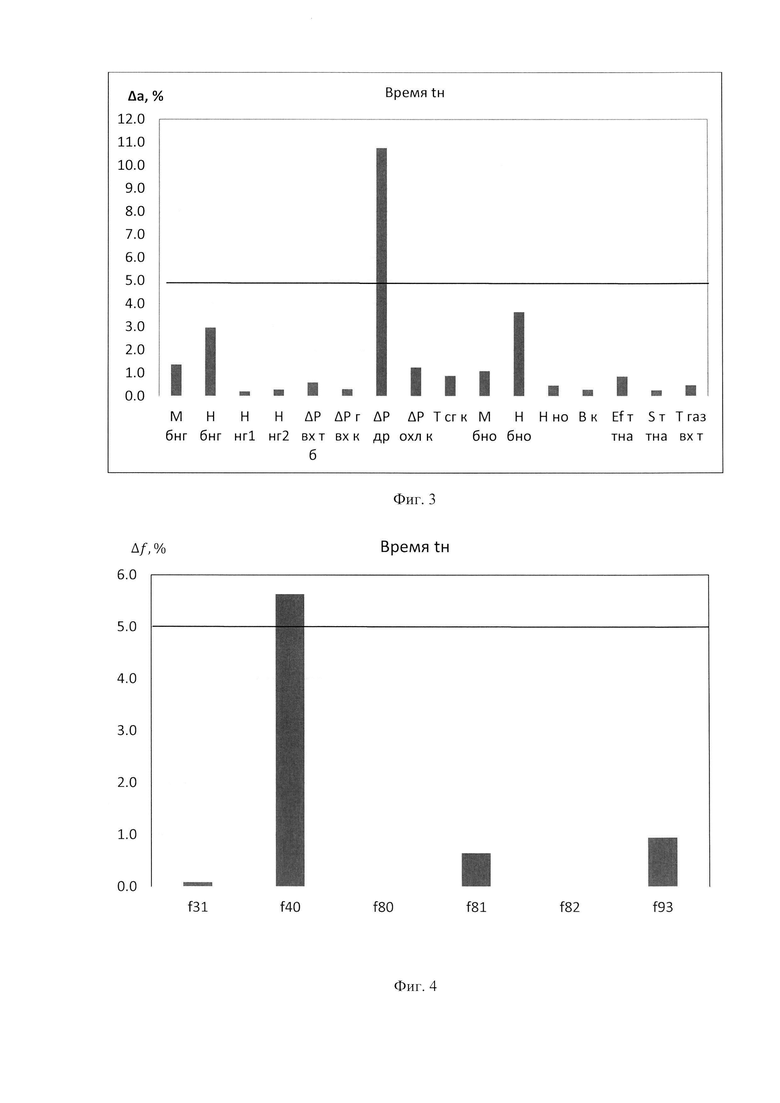
3-й этап. На этом этапе определяют в момент времени tн локализацию неисправности, которая может привести к нарушению характеристики А агрегата двигателя, полученной на автономных испытаниях (фиг. 3). Наименования контролируемых характеристик приведены в таблице 2.
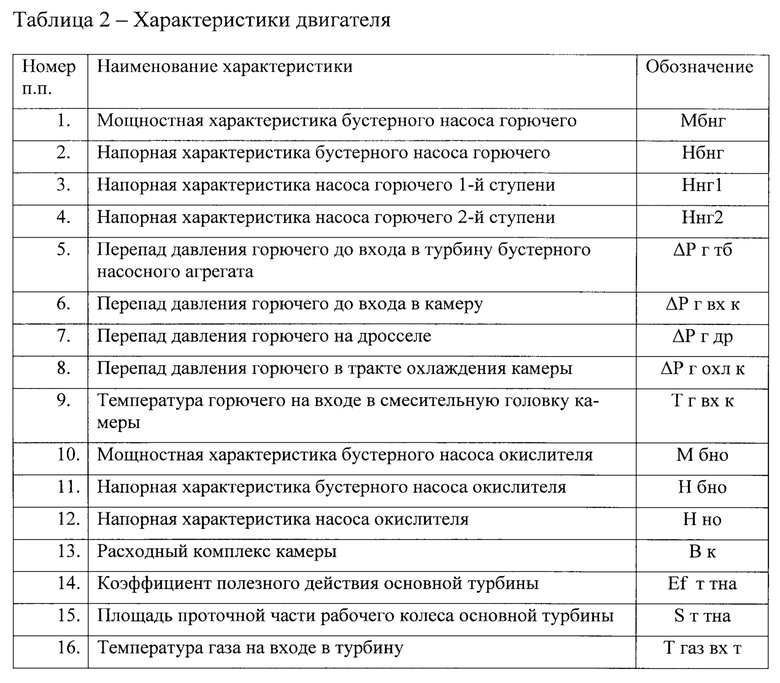
Локализацию нарушенной характеристики агрегата двигателя производят известным способом. Характеристику А принимают нарушенной, если отклонение признака  от эталонного превышает допустимое (фиг. 3). В рассматриваемом случае нарушена рабочая характеристика дросселя, полученная при автономных испытаниях.
от эталонного превышает допустимое (фиг. 3). В рассматриваемом случае нарушена рабочая характеристика дросселя, полученная при автономных испытаниях.
Для подтверждения этого диагноза переходят к 4-му этапу контроля. 4-й этап. На этом этапе определяют в момент времени tн локализацию неисправности в контуре двигателя, содержащем совокупность агрегатов, по методу структурного исключения [1]. В этом случае, определяют нарушение взаимосвязи параметров в исключенном уравнении или в совокупности уравнений по выходу за границу поля допуска значения невязки  функции
функции  связывающей параметры в исключенном уравнении, фиг. 4, где i - номер уравнения. В рассматриваемом случае нарушена взаимосвязь параметров, описываемая уравнением
связывающей параметры в исключенном уравнении, фиг. 4, где i - номер уравнения. В рассматриваемом случае нарушена взаимосвязь параметров, описываемая уравнением  - баланс расходов горючего на входе в дроссель. Это подтверждает диагноз о нарушении перепадной характеристики дросселя, установленный на 3-м этапе.
- баланс расходов горючего на входе в дроссель. Это подтверждает диагноз о нарушении перепадной характеристики дросселя, установленный на 3-м этапе.
Если в результате указанных выше процедур не выявлен ни один контур или элемент конструкции двигателя, в котором содержится неисправность, то принимают решение, что неисправность не локализована и формируют сигнал системе управления для принятия решения о воздействии на двигатель с целью его выключения.
На фиг. 5 представлена логическая блок-схема процедур, реализующих предлагаемый способ диагностирования.
Промышленная применимость
Предлагаемый способ выявления и локализации неисправности в ЖРД при огневом испытании проработан и прошел апробирование на предприятии АО «НПО Энергомаш имени академика В.П. Глушко» при экспериментальной доводке, эксплуатации и модернизации ЖРД.
Список использованных источников
1. Мартиросов Д.С. Диагностирование сложных технических систем на основе математических моделей и измеряемых параметров методом структурного исключения. - М.: Изд-во МАИ, 1998. - 51 с.
Изобретение относится к области функционального диагностирования сложных технических систем, в частности жидкостных ракетных двигателей (ЖРД). Способ основан на использовании текущих измеренных в процессе огневого испытания значений параметров функционирования ЖРД, математической модели нормально функционирующего двигателя и характеристиках, полученных при автономных испытаниях, с помощью которых формируются диагностические признаки, определяющие нормальное или ненормальное функционирование с указанием момента времени возникновения и локализации неисправности. Диагностирование проводится в следующей последовательности. В начале каждого стационарного режима работы двигателя выделяют интервал времени, на котором определяют среднеарифметические значения измеряемых параметров, принимают их как эталонные на контролируемом режиме. По этим значениям проводят коррекцию математической модели, после чего, в следующих циклах измерений проводят последовательно: контроль отклонений текущих измеренных значений параметров от эталонных; контроль отклонений измеренных значений параметров от их расчетных значений по математической модели; контроль характеристик двигателя, полученных на автономных испытаниях; локализацию неисправного контура двигателя, содержащего совокупность агрегатов. На каждом из последних двух этапов, в случае выявления неисправности, формируют сигнал системе управления на выключение двигателя. Изобретение обеспечивает повышение достоверности диагноза и минимизации вероятности пропуска дефекта и ложного отключения двигателя за счет введения поэтапного многоуровневого контроля. 5 ил., 2 табл.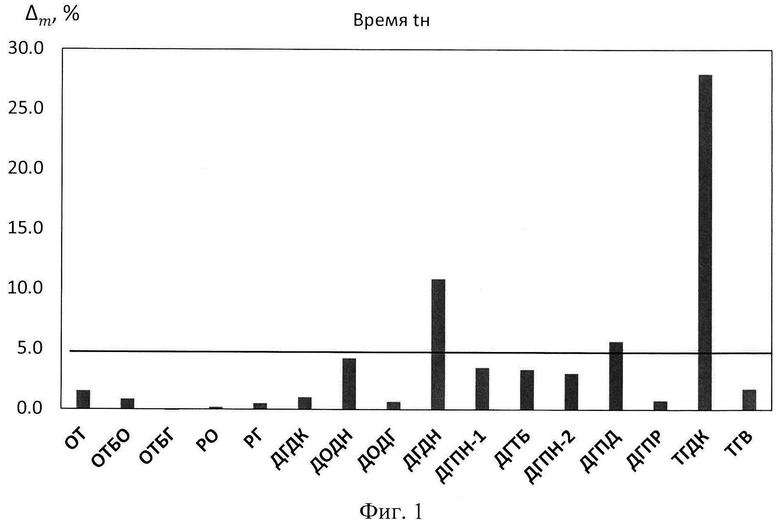
Способ функциональной диагностики жидкостного ракетного двигателя при огневом испытании, заключающийся в формировании диагностических признаков момента времени возникновения и локализации неисправности путем сравнения отклонений текущих измеренных в процессе огневого испытания параметров функционирования от их расчетных значений, полученных по математической модели нормально функционирующего двигателя, представленной в виде системы уравнений рабочих процессов и содержащей характеристики двигателя, полученные при автономных испытаниях агрегатов, отличающийся тем, что диагностирование проводят в следующей последовательности: на 1-м этапе в начале каждого стационарного режима двигателя выделяют интервал времени, на котором определяют средние значения измеряемых параметров, а в начале переходного режима определяют средние значения производных параметров по времени и принимают их как эталонные на контролируемом режиме, по этим значениям проводят коррекцию математической модели и принимают полученные из ее решения характеристики двигателя как эталонные, после чего, в последующих циклах измерений проводят контроль отклонения текущих измеренных значений параметров от эталонных и, если все эти отклонения в норме, то принимают решение, что двигатель функционирует нормально, в противном случае, фиксируют последовательно моменты времени пересечения границ допуска отклонений трех параметров от их эталонных значений, наибольший из этих моментов времени принимают как предполагаемый момент времени возникновения неисправности и для подтверждения этого решения переходят ко 2-му этапу, на котором в момент времени возникновения неисправности определяют отклонения измеренных значений параметров от расчетных по откорректированной на 1-ом этапе математической модели и, если все эти отклонения в норме, то принимают решение, что двигатель функционирует нормально, в противном случае, переходят к 3-му этапу, на котором локализуют неисправность в момент времени ее возникновения по отклонениям текущих расчетных значений характеристик двигателя от эталонных и, если одно из этих отклонений не в норме, принимают решение, что неисправность вызвала нарушение соответствующей характеристики двигателя и для подтверждения этого решения переходят к 4-му этапу, на котором локализуют неисправность по методу структурного исключения, и формируют сигнал системе управления для принятия решения о воздействии на двигатель с целью его выключения или перевода на безопасный режим работы.
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2009 |
|
RU2393450C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРА РАКЕТНОГО ДВИГАТЕЛЯ | 2015 |
|
RU2654310C2 |
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ СОСТОЯНИЯ ПНЕВМОГИДРАВЛИЧЕСКОГО ОБЪЕКТА | 1998 |
|
RU2133952C1 |
| US 4158884 A1, 11.03.2010. | |||

