Изобретение относится к способам функционального контроля и диагностирования состояния при испытаниях сложных пневмогидравлических объектов, например, жидкостных ракетных двигателей (ЖРД).
Известно, что ЖРД эксплуатируются в экстремальных условиях, в условиях высоких температур и давлений в газовых и жидкостных трактах при весьма жестких ограничениях по текущим параметрам. В таких условиях даже кратковременный выход параметра (параметров) за пределы допустимых значений способен привести к выходу двигателя из строя. Поэтому весьма важно при возникновении неисправности в работе ЖРД как можно быстрее определить ее, диагностировать узел, в котором возникла неисправность, определить степень ее влияния на работу ЖРД и принять управляющее решение - либо продолжить работу, либо отключить неисправный узел, либо отключить ЖРД.
Опыт эксплуатации ЖРД показывает, что из всех возможных неисправностей, которые могут возникнуть при работе ЖРД, более половины (до 70%) связаны с возникновением негерметичности газовых или жидкостных трактов.
Поэтому весьма важна быстрота реакции на такие случаи, которая должна обеспечиваться системой управления ЖРД. В то же время инерционность известных систем управления зачастую не позволяет осуществить функцию скорейшего отключения ЖРД в случае возникновения такого класса неисправностей.
Известен способ контроля состояния ЖРД, заключающийся в измерении контрольных параметров и сравнении их с допустимыми (пороговыми) значениями, который реализуется с помощью информационно-измерительной системы (см., например, «Испытания ЖРД» под ред. Левина В.Я. Москва, «Машиностроение», 1981 г., с.199).
Данный способ осуществляет контроль состояния объекта и не позволяет диагностировать неисправность, т.е. определять место, степень и наименование неисправности.
Наиболее близким к предлагаемому является способ контроля и диагностирования пневмогидравлического объекта, заключающийся в том, что циклически измеряют параметры в контрольных точках полостей объекта, сравнивают их с расчетными пороговыми значениями (уровнями) и диагностируют (локализуют) неисправность в случае выхода текущего значения параметра за его пороговый уровень (патент РФ №2018900, кл. G05B 23/00, 1990 г.) - наиболее близкий аналог.
В результате анализа известного способа необходимо отметить, что технологические отклонения характеристик узлов и агрегатов, комплектующих ЖРД, приводят к необходимости назначения широких пороговых значений (±6% от номинального уровня), что снижает чувствительность способа и приводит к ошибкам контроля, недостоверности заключения о состоянии объекта, несвоевременному прекращению его функционирования.
Задачей, решаемой изобретением, является повышение чувствительности способа, а также сокращение времени локализации отказа ЖРД для своевременного принятия решения о возможности его дальнейшего функционирования.
Поставленная задача достигается тем, что в способе контроля и диагностирования жидкостного ракетного двигателя, заключающемся в циклическом измерении контролируемых параметров, сравнении их с заданными пороговыми значениями и по результатам сравнения осуществлении контроля и диагностирования двигателя, новым является то, что в качестве измеряемых параметров используют температуру и давление в газовых и жидкостных трактах двигателя, причем дополнительно измеряют давление и температуру среды в двигательном отсеке, сравнивают измеренные параметры с пороговыми значениями и по результатам сравнения фиксируют неисправности в двигателе и его узлах, при этом при возрастании давления и температуры в двигательном отсеке фиксируют негерметичность в газовых трактах двигателя и анализируют информацию с датчиков, установленных на них, увеличивая при этом частоту их опроса за счет снижения частоты опроса датчиков в жидкостных полостях, а при возрастании давления и снижении температуры в двигательном отсеке фиксируют негерметичность в жидкостных трактах, увеличивая частоту опроса датчиков, установленных на них, за счет снижения частоты опроса датчиков в газовых полостях.
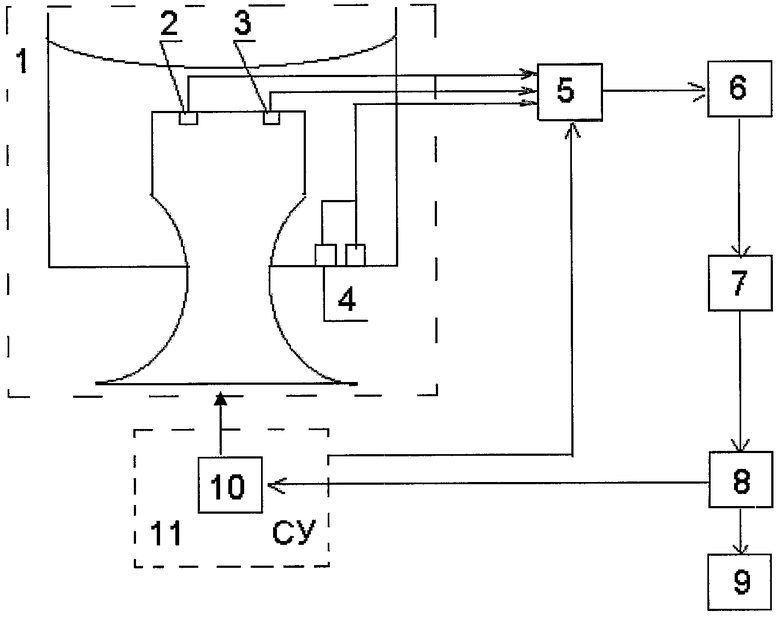
Сущность заявленного способа поясняется чертежом, на котором представлена информационно-управляющая система (ИУС) для осуществления способа.
На данной схеме объект контроля и диагностики (ЖРД) обозначен позицией 1. В газовых трактах двигателя установлены датчики давления и температуры 2, а в жидкостных трактах - датчики давления и температуры 3. В двигательном отсеке установлены датчики давления и температуры 4. Датчики 2, 3, 4 связаны со входами коммутирующего устройства 5. Выход коммутирующего устройства 5 связан через устройство сопряжения 6 со входом ЭВМ 7, которая через устройство сопряжения 8 связана с магнитными носителями информации 9 (предназначены для анализа работы системы) и с устройством 10 аварийного выключения ЖРД, входящим в систему управления 11 ЖРД, которая в свою очередь связана со входом устройства 5.
Способ осуществляют следующим образом.
До начала испытания ЖРД известным образом, например, с помощью математической модели формируют пороговые значения измеряемых параметров (температуры и давления в газовых и жидкостных трактах) в зависимости от технологических отклонений характеристик узлов и агрегатов, комплектующих двигатель и программы испытания. При этом пороговые значения измеряемых параметров в полостях двигателя составляют 6-7% (25-40 бар) от номинального уровня, а пороговые значения давления и температуры в двигательном отсеке могут быть приняты на уровне ожидаемых расчетных, полученных с использованием математических моделей, которые заносят в систему управления 11.
При работе ЖРД датчики 2, 3, 4 циклически замеряют текущие значения параметров в жидкостных и газовых трактах двигателя, а также значения давления и температуры в двигательном отсеке. Частота опроса датчиков задается системой управления 11.
Сигналы измеренных параметров и сигналы пороговых значений параметров поступают на коммутирующее устройство 5, где осуществляется операция сравнения измеренных значений каждого параметра со значениями его пороговых уровней, после чего сигналы рассогласования через устройство сопряжения 6 поступают на ЭВМ 7, где сигналы обрабатываются и передаются через блок сопряжения на запись на носители информации 9 и на устройство 10 аварийного отключения ЖРД.
При нахождении всех параметров в диапазоне между пороговыми уровнями принимают состояние двигателя нормальным и ЖРД продолжает работу.
При выходе любого первого из параметров за его пороговый уровень устанавливают факт появления неисправности и переходят к ее диагностированию, которое осуществляется в ЭВМ.
Учитывая узкие пороговые значения допусков на давление и температуру в двигательном отсеке при возникновении негерметичности ЖРД первыми параметрами, значения которых выйдут за пороговые значения, будут давление и температура в двигательном отсеке. Если значения измеренных параметров значительно отличаются от заданных, устройство 10 дает команду на отключение ЖРД, иначе может произойти его разрушение.
Однако задачей настоящего способа является не только контроль работы ЖРД, но и диагностирование состояния его основных узлов.
Экспериментально установлено, что повышение температуры и давления в двигательном отсеке связано с появлением негерметичности в газовых трактах ЖРД, а возрастание давления с одновременным снижением температуры в двигательном отсеке связано с появлением негерметичности в жидкостных трактах ЖРД. Это явление и положено в основу диагностирования узлов и агрегатов ЖРД.
В случае повышения давления и температуры в двигательном отсеке, которые регистрируются датчиками 4, и выходов выхода параметров за пределы установленного интервала, увеличивают частоту опроса датчиков, устанавливаемых в газовых полостях ЖРД (за счет уменьшения частоты опроса датчиков в жидкостных полостях) и на основе данных показаний вычисляют обобщенные характеристики узлов и агрегатов газового тракта двигателя и по результатам сравнения их с пороговыми значениями производят локализацию отказа, определяя отказавший узел.
При возникновении негерметичности в жидкостных трактах, вследствие испарения компонента топлива, в двигательном отсеке происходит снижение температуры среды и увеличение давления, что приведет к выходу температуры в двигательном отсеке за нижний пороговый уровень, а давление за верхний пороговый уровень.
В данном случае увеличивают частоту опроса датчиков, установленных в жидкостных трактах ЖРД за счет снижения частоты опроса датчиков, установленных в газовых трактах, вычисляют обобщенные характеристики узлов и агрегатов гидравлического тракта двигателя, сравнивают их с пороговыми значениями и по результатам сравнения производят локализацию отказа, определяя отказавший узел.
Уменьшение частоты опроса датчиков позволяет не перегружать систему управления и тем самым повысить ее быстродействие и сократить время локализации отказа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ РАКЕТНОГО ДВИГАТЕЛЯ | 2011 |
|
RU2476850C1 |
| Способ локализации неисправности жидкостного ракетного двигателя при огневом испытании | 2020 |
|
RU2750875C1 |
| Способ функционального диагностирования жидкостного ракетного двигателя при огневом испытании | 2020 |
|
RU2781738C2 |
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ СОСТОЯНИЯ ПНЕВМОГИДРАВЛИЧЕСКОГО ОБЪЕКТА | 1998 |
|
RU2133952C1 |
| Способ контроля характеристик агрегатов жидкостного ракетного двигателя при огневом испытании | 2020 |
|
RU2750874C1 |
| СПОСОБ КОНТРОЛЯ ПОТЕРИ ГЕРМЕТИЧНОСТИ РАЗДЕЛИТЕЛЯ БАКА ВЫТЕСНИТЕЛЬНОЙ СИСТЕМЫ ПОДАЧИ ТОПЛИВА ДВИГАТЕЛЬНОЙ УСТАНОВКИ КОСМИЧЕСКИХ АППАРАТОВ | 2005 |
|
RU2327128C2 |
| Способ контроля технического состояния жидкостного ракетного двигателя на переходных режимах стендового испытания | 2020 |
|
RU2758781C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ НАСОСОВ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2021 |
|
RU2791147C1 |
| СПОСОБ КОНТРОЛЯ ПОТЕРИ ГЕРМЕТИЧНОСТИ ТРУБОПРОВОДОВ ПНЕВМОГИДРАВЛИЧЕСКОЙ СИСТЕМЫ | 2006 |
|
RU2327127C2 |
| Способ локализации неисправности жидкостного ракетного двигателя при огневом испытании | 2022 |
|
RU2820906C2 |
Изобретение относится к способам функционального контроля и диагностирования состояния при испытаниях сложных пневмогидравлических объектов, например жидкостных ракетных двигателей (ЖРД). Способ контроля и диагностирования жидкостного ракетного двигателя заключается в циклическом измерении контролируемых параметров, сравнении их с заданными пороговыми значениями и по результатам сравнения осуществлении контроля и диагностирования двигателя. В качестве измеряемых параметров используют температуру и давление в газовых и жидкостных трактах двигателя, причем дополнительно измеряют давление и температуру среды в двигательном отсеке, сравнивают измеренные параметры с пороговыми значениями и по результатам сравнения фиксируют неисправности в двигателе и его узлах. Изобретение обеспечивает повышение быстродействия системы управления и сокращение времени локализации отказа. 1 з.п.ф-лы, 1 ил.
1. Способ контроля и диагностирования жидкостного ракетного двигателя, заключающийся в циклическом измерении контролируемых параметров, сравнении их с заданными пороговыми значениями и по результатам сравнения осуществление контроля и диагностирования двигателя, отличающийся тем, что в качестве измеряемых параметров используют температуру и давление в газовых и жидкостных трактах двигателя, причем дополнительно измеряют давление и температуру среды в двигательном отсеке, сравнивают измеренные параметры с пороговыми значениями и по результатам сравнения фиксируют неисправности в двигателе и его узлах.
2. Способ контроля и диагностирования жидкостного ракетного двигателя по п.1, отличающийся тем, что при возрастании давления и температуры в двигательном отсеке фиксируют негерметичность в газовых трактах двигателя и анализируют информацию с датчиков, установленных на них, увеличивая при этом частоту их опроса за счет снижения частоты опроса датчиков в жидкостных полостях, а при возрастании давления и снижении температуры в двигательном отсеке фиксируют негерметичность в жидкостных трактах, увеличивая частоту опроса датчиков, установленных на них, за счет снижения частоты опроса датчиков в газовых полостях.
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ СОСТОЯНИЯ ПНЕВМОГИДРАВЛИЧЕСКОГО ОБЪЕКТА | 1998 |
|
RU2133952C1 |
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИКИ ПНЕВМОГИДРАВЛИЧЕСКОГО ОБЪЕКТА | 1990 |
|
RU2018900C1 |
| SU 1519350 A1, 20.08.1996 | |||
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ПРОТЯЖЕННЫХ СТРИКТУР И ОБЛИТЕРАЦИЙ МОЧЕТОЧНИКА | 2009 |
|
RU2407463C1 |
| US 4158884 А, 19.06.1979. | |||

