Изобретение относится к системам автоматического дистанционного мониторинга протяженных объектов с помощью беспилотных летательных аппаратов (БПЛА) и может быть использовано в электроэнергетике для контроля состояния линий электропередачи и электроподстанций, установленных на участках значительной протяженности.
Известно устройство «Автоматический беспилотный комплекс диагностики состояния протяженных объектов, оснащенных собственной информационной системой» RU 2 464 643 C1.
Автоматический беспилотный комплекс диагностики состояния протяженных объектов, оснащенных собственной информационной системой, содержащий дистанционно пилотируемый летательный аппарат (ДПЛА) вертолетного типа, на котором установлены подсоединенные к первой информационной шине (ИШ) система автоматического управления с блоком управления бортовыми системами, система автоматического дистанционного управления полетом ДПЛА и работой его систем, бортовая система диагностики состояния протяженных объектов (БСДСПО) с комплектом бортовых датчиков и бортовая приемопередающая аппаратура радиотелеметрической системы (БАРТС) с приемной и передающей антеннами, а также содержит мобильный наземный пункт управления (МНПУ) ДПЛА, состоящий из подсоединенных ко второй ИШ пульта управления ДПЛА, пульта управления БСДСПО и наземной приемопередающей аппаратуры радиотелеметрической системы (НАРТС) с приемной и передающей антеннами, при этом МНПУ ДПЛА подключен модемом к многоканальной линии передачи данных (МКЛПД), объединяющей центральный узел эксплуатации протяженного объекта (ЦПЭПО) и N локальных пунктов протяженного объекта (ЛП), а также не менее чем N установленных на ЛП наземных подсистем диагностики состояния протяженных объектов (НПДСПО), каждая из которых состоит из пульта наземной диагностики (ПНД) и комплекта встроенных датчиков, подсоединенных к третьей ИШ, и размещенных вблизи участка протяженного объекта комплекта автономных датчиков, при этом ПНД подключен модемом к МКЛПД и к НАРТС с приемной и передающей антеннами, отличающийся тем, что в БСДСПО и в каждую НПДСПО дополнительно введены преобразователь значений выходных сигналов комплекта бортовых датчиков БСДСПО и комплекта автономных датчиков НПДСПО и преобразователь значений выходных сигналов комплекта встроенных датчиков НПДСПО в количественные значения признаков соответствия фактических значений диагностируемых параметров состояния протяженного объекта допустимым, который выполнен в виде последовательно соединенных блока памяти допустимых значений диагностируемых параметров, четных входов блока элементов «И» и вычислителя, при этом комплект бортовых датчиков БСДСПО и комплект встроенных датчиков НПДСПО подключены к нечетным входам соответствующих блоков элементов «И», выходы вычислителей БСДСПО и НПДСПО подсоединены соответственно к первой и четвертой ИШ, а также в состав пульта управления БСДСПО МНПУ, в состав каждого ПНД НПДСПО и в ЦПЭПО дополнительно введено по одному подсоединенному соответственно ко второй, третьей и четвертой ИШ программному модулю, обеспечивающему формирование цветографических образов (ЦГО) состояния протяженного объекта. Технический результат устройства - расширение функциональных возможностей устройства в части одновременного компактного представления разнородной диагностической информации о состоянии протяженного объекта и его изменениях и повышение за счет этого оперативности и точности диагностики состояния протяженных объектов.
Недостатками известного устройства являются:
1) Применение одного БПЛА, что оказывает негативное влияние на следующие факторы:
- производительность (для выполнения обследования ЛЭП требуется больше времени в сравнении с группой БПЛА);
- точность результата (получение подробной модели ЛЭП, выполненной в крупном масштабе, осложняется как необходимостью подзарядки аккумуляторной батареи, либо дозаправки БПЛА, так и существенными временными затратами, связанными с подробной съемкой каждого элемента ЛЭП);
- ограничение числа одновременно применяемых датчиков (одновременное применение датчиков нескольких типов ограничено грузоподъемностью БПЛА, существенными объемами потребления заряда аккумуляторной батареи, либо топлива).
2) БПЛА не оснащен подсистемой машинного зрения, позволяющей существенно повысить его возможности в плане функционирования в автономном от оператора режиме.
3) Отсутствие функции автоматического выявления проблемных ситуаций (дефекты опор, проводов, изоляторов, упавшие деревья, перегрев элементов ЛЭП, пожары, наводнения в защитной зоне ЛЭП) по вычисленным количественным параметрам, прогнозирования их развития, а также формирования рекомендаций для их устранения.
4) Отсутствие функции формирования трехмерной модели ЛЭП и ее защитной полосы с автоматической идентификацией элементов ЛЭП, которая позволит выполнить оценку текущего состояния ЛЭП, сформировать (или уточнить) чертежи и прочую документацию, произвести анализ на предмет ее реконструкции.
Известно устройство RU 174 052 U1 «Программно-аппаратный комплекс мониторинга состояния воздушных линий электропередач», содержащее беспилотный летательный аппарат 1, на борту которого расположены цифровая фотокамера 2, тепловизионный сканер 3, лазерный сканер 4, навигационный GPS_ГЛОНАСС приемник 5 и инерциальная навигационная система 6. Кроме того, устройство содержит информационно-вычислительный блок 7, находящийся на борту беспилотного летательного аппарата 1 и выполненный с возможностью связи с наземной станцией оператора 8. Технический результат - расширение функциональных возможностей устройства мониторинга состояния воздушных линий электропередач, выполненного в виде летательного средства, в части одновременного получения комплексной диагностической информации о состоянии линий электропередач и повышения за счет этого оперативности и точности.
Недостатками известного устройства являются:
1) Применение одного БПЛА, что оказывает негативное влияние на следующие факторы:
- производительность (для выполнения обследования ЛЭП требуется больше времени в сравнении с группой БПЛА);
- точность результата (получение подробной модели ЛЭП, выполненной в крупном масштабе, осложняется как необходимостью подзарядки аккумуляторной батареи, либо дозаправки БПЛА, так и существенными временными затратами, связанными с подробной съемкой каждого элемента ЛЭП);
- ограничение числа одновременно применяемых датчиков (одновременное применение датчиков нескольких типов ограничено грузоподъемностью БПЛА, существенными объемами потребления заряда аккумуляторной батареи, либо топлива).
2) Отсутствие функции автоматического выявления проблемных ситуаций (дефекты опор, проводов, изоляторов, упавшие деревья, перегрев элементов ЛЭП, пожары, наводнения в защитной зоне ЛЭП) по вычисленным количественным параметрам, прогнозирования их развития, а также формирования рекомендаций для их устранения.
3) Большое количество датчиков, установленных на БПЛА, влечет существенные объемы потребления электроэнергии и, как следствие, необходимость частой подзарядки, либо дозаправки БПЛА в процессе работы.
4) Отсутствие возможности передачи результатов мониторинга ЛЭП на наземную станцию в процессе полета БПЛА, что позволило бы ускорить процедуру обработки этих данных (на наземной станции), а также снизило бы риски утери этих данных в результате крушения или повреждения БПЛА.
Известно устройство «Роботизированный комплекс контроля линий электропередач и электроподстанций» RU 2 464 643 C1. Заявленное изобретение относится к комплексу, который предназначен для контроля высоковольтных линий и электроподстанций, установленных на участках значительной протяженности. Заявленный комплекс осуществляет патрулирование геликоптером участка в 200 километров до 12 раз в сутки, в любую погоду. При этом осуществляет контроль состояния изоляторов, подвесов, мест соединений и подключений. Контролирует уровень зарастания деревьями и кустарником линей электропередач (далее - ЛЭП), нахождение в районе опор и подстанций посторонних людей. Контролирует противопожарную обстановку на всем протяжении. Формирует отчеты для предоставления ответственным лицам, и взаимодействует с ремонтными бригадами. При запросе зависает над проблемным участком и передает, в режиме реального времени, общую картину происшествия подробное изображение проблемных частей, включая температуру и изображение в ультрафиолете, позволяющее реально оценить происшествие.
Недостатками известного устройства являются:
1) Применение одного БПЛА, что оказывает негативное влияние на следующие факторы:
- производительность (для выполнения обследования ЛЭП требуется больше времени в сравнении с группой БПЛА);
- точность результата (получение подробной модели ЛЭП, выполненной в крупном масштабе, осложняется как необходимостью подзарядки аккумуляторной батареи БПЛА, так и существенными временными затратами, связанными с подробной съемкой каждого элемента ЛЭП);
- ограничение числа одновременно применяемых датчиков (одновременное применение датчиков нескольких типов ограничено грузоподъемностью БПЛА, существенными объемами потребления заряда аккумуляторной батареи).
2) Отсутствие функции формирования трехмерной модели ЛЭП и ее защитной полосы с автоматической идентификацией элементов ЛЭП, которая позволит выполнить оценку текущего состояния ЛЭП, сформировать (или уточнить) информационную модель ЛЭП, выполнить построение чертежей и прочей документации (отдельных элементов ЛЭП, участков), произвести анализ на предмет необходимости ее реконструкции.
3) Установка точек доступа через семь километров по маршруту движения БПЛА, а также монтаж связывающей их линии связи (для образования бесшовного поля wi-fi) является трудоемким процессом и требует существенных финансовых затрат.
4) Установка автоматического комплекса обслуживания комплекс исключительно в середине маршрута. Понятие «середина маршрута» зависит от протяженности самого маршрута и в определенных случаях БПЛА может не хватить топлива, чтобы до нее добраться.
Наиболее близким к заявляемому техническому решению по технической сущности и достигаемому техническому результату является устройство RU 2 789 896 C1 «Интеллектуальная система автоматического дистанционного мониторинга состояния ЛЭП».
Интеллектуальная система автоматического дистанционного мониторинга состояния ЛЭП, состоящая из группы всепогодных БПЛА, автоматизированного комплекса обслуживания, центра обработки информации и программного обеспечения, при этом каждый БПЛА оснащен лазерным сканером, ИК-камерой, УФ-камерой, формирующими комплексную модель участка ЛЭП и охранной зоны, включающую трехмерную, ПК и УФ-модели, перечень идентифицированных элементов ЛЭП, а также объектов охранной зоны, перечень идентифицированных угроз и опасных ситуаций, и управляется двумя программами, при этом первая отвечает за непосредственное управление аппаратом, высоту, скорость полета, сканирование окружающего пространства и уклонение от столкновений, контролируя условия полета, формирует адекватную реакцию на изменение погодных условий, поддерживает канал связи и передачу информации, прием команд с центрального сервера, корректирует полетное задание, вторая программа установлена на центральном сервере и осуществляет прием и обработку данных, полученных с БПЛА, осуществляет аналитику видеопотока, формирует отчеты, команды на изменение полетного задания, архивирует информацию и высылает отчеты ответственным лицам, автоматический комплекс обслуживания обеспечивает прием БПЛА, анализ технического состояния, дозаправку, скачивает информацию, накопленную за время полета, на внутренние носители, обеспечивает вылет БПЛА по графику облета, передает информацию на центральный сервер, комплекс работает автономно, представляет собой бокс, в который приземляется БПЛА, в состав комплекса входят заправочная емкость и устройство для автоматической заправки, дополнительно бокс оборудован емкостью с жидкостью, препятствующей обледенению, и устройствами орошения винтов, при этом правление комплексом обслуживания осуществляется программным обеспечением, установленным на центральный сервер, центральный сервер выполнен с возможностью расположения в любом удобном для работы месте, осуществляет функции приема, накопления и хранения информации, обеспечивает постоянную аналитику получаемой информации, осуществляет рассылку, содержащую сведения аналитики, формирует сводную справку о результатах контроля и анализа происшествий и состояния контролируемых объектов, оборудования, осуществляет доступ сотрудников к архивам и базам данных, при этом БПЛА по уровню иерархии делятся на ведущие и вспомогательные, которые находятся в подчинении у ведущих и используются для более детального обследования ЛЭП и охранной зоны, число ведущих БПЛА составляет один на полосу шириной 30 м между правой и левой границами охранной зоны ЛЭП, число вспомогательных БПЛА на один ведущий БПЛА составляет два, если ведущий БПЛА выполняет обследование непосредственно ЛЭП, или один, если ведущий БПЛА выполняет обследование охранной зоны ЛЭП, кроме того, БПЛА вне зависимости от типа включает аппаратно-программный комплекс БПЛА, соответствующий первой программе, систему приводов, топливный бак, приемо-передающую антенну с радиусом охвата в 240 км, обеспечивающую радиомост непосредственно между БПЛА, между БПЛА и центральным сервером со скоростью не менее 50 Мбит/с, при этом аппаратно-программный комплекс БПЛА состоит из подсистемы машинного зрения, подсистемы управления памятью, подсистемы управления, подсистемы навигации, реализованной на базе навигатора GPS или ГЛОНАСС, при этом подсистема машинного зрения и подсистема управления интегрированы в прошивку отдельных высокопроизводительных микроконтроллеров, при этом подсистема машинного зрения включает комплект бортовых датчиков, включающий лазерное сканирующее устройство с функцией определения цветности точек, ИК-камеру, УФ-камеру, блок 3D-реконструкции, блок анализа данных ПК-съемки, блок анализа данных УФ-съемки, блок комплексирования информации, блок распознавания образов, подсистема управления памятью включает блок памяти допустимых значений диагностируемых параметров, блок хранения весовых коэффициентов сверточной нейронной сети, буфер собранных данных, базу знаний подсистемы управления, подсистема управления включает блок управления, блок прогнозирования траектории полета, блок формирования управляющих воздействий, блок координации, блок самодиагностики, кроме того, центральный сервер включает аппаратно-программный комплекс центрального сервера, соответствующий второй программе, приемо-передающую антенну с радиусом охвата в 240 км, обеспечивающую радиомост непосредственно между БПЛА, между БПЛА и центральным сервером со скоростью не менее 50 Мбит/с, устройство ввода, устройство вывода, при этом результатом работы центрального сервера является комплексная модель ЛЭП, включающая трехмерную модель ЛЭП и охранной зоны, ПК-модель ЛЭП и охранной зоны, УФ-модель ЛЭП и охранной зоны, детализованные трехмерные, ПК, УФ-модели отдельных элементов ЛЭП с указанием типов и географических координат этих элементов, стрела провиса проводов, угол наклона опор ЛЭП, смещение опор ЛЭП, прогноз развития идентифицированных угроз и опасных ситуаций, перечень рекомендаций для ЛПР по устранению выявленных на ЛЭП угроз и опасных ситуаций, кроме того автоматический комплекс обслуживания включает приемо-передающую антенну с радиусом охвата в 240 км, обеспечивающую радиомост с центральным сервером со скоростью не менее 50 Мбит/с.Техническим результатом прототипа является повышение скорости и надежности процесса мониторинга состояния ЛЭП, а также точности получаемого результата, снижение издержек, связанных с монтажом и обслуживанием системы связи и передачи информации.
Недостатки прототипа:
1) Применение БПЛА, основанных на двигателях внутреннего сгорания (ДВС), требующих более сложного обслуживания по сравнению с электродвигателями.
2) Применение в ДВС бензина в качестве топлива влечет повышенные требования к технике безопасности, особенно вблизи ЛЭП.
3) Необходимость в хранении на автоматическом комплексе обслуживания запаса топлива для заправки БПЛА.
4) Воздушный лазерный сканер обладает большей массой и энергопотреблением, чем фотограмметрическая камера с аналогичной точностью.
5) Применение группы БПЛА оправдано при формировании трехмерной модели ЛЭП, а также выявлении незначительных повреждений ее элементов (однако способных потенциально оказать негативное влияние на работоспособность ЛЭП). При этом применение группы БПЛА на регулярной основе с целью выявления потенциальных злоумышленников, находящихся в охранной зоне ЛЭП, или оперативного мониторинга состояния ЛЭП и ширины просеки не является целесообразным.
Технической задачей заявляемого изобретения является устранение недостатков прототипа, а также повышение скорости и качества мониторинга состояния ЛЭП.
Техническим результатом заявляемого изобретения является обеспечение непрерывности процесса мониторинга состояния и безопасности ЛЭП за счет снижения
- издержек и рисков, связанных с применением и обслуживанием БПЛА, основанных на ДВС (взрывоопасность таких БПЛА, необходимость их дозаправки в процессе работы);
- издержек, связанных с применением лазерных сканеров для осуществления съемки ЛЭП и ее охранной зоны (существенная масса и энергопотребление лазерных сканеров).
Технический результат достигается тем, что интеллектуальная система автоматического дистанционного мониторинга состояния и безопасности ЛЭП в непрерывном режиме, состоящая из группы всепогодных БПЛА, автоматизированного комплекса обслуживания, центра обработки информации и программного обеспечения, при этом каждый БПЛА оснащен ИК-камерой, и управляется двумя программами, при этом первая отвечает за непосредственное управление аппаратом, высоту, скорость полета, сканирование окружающего пространства и уклонение от столкновений, контролируя условия полета, формирует адекватную реакцию на изменение погодных условий, поддерживает канал связи и передачу информации, прием команд с центрального сервера, корректирует полетное задание, вторая программа установлена на центральном сервере и осуществляет прием и обработку данных, полученных с БПЛА, осуществляет аналитику видеопотока, формирует отчеты, команды на изменение полетного задания, архивирует информацию и высылает отчеты ответственным лицам, автоматический комплекс обслуживания обеспечивает прием БПЛА, анализ технического состояния, скачивает информацию, накопленную за время полета, на внутренние носители, обеспечивает вылет БПЛА по графику облета, передает информацию на центральный сервер, комплекс работает автономно, представляет собой бокс, в который приземляется БПЛА, дополнительно бокс оборудован емкостью с жидкостью, препятствующей обледенению, и устройствами орошения винтов, при этом правление комплексом обслуживания осуществляется программным обеспечением, установленным на центральный сервер, центральный сервер выполнен с возможностью расположения в любом удобном для работы месте, осуществляет функции приема, накопления и хранения информации, обеспечивает постоянную аналитику получаемой информации, осуществляет рассылку, содержащую сведения аналитики, формирует сводную справку о результатах контроля и анализа происшествий и состояния контролируемых объектов, оборудования, осуществляет доступ сотрудников к архивам и базам данных, БПЛА вне зависимости от типа включает аппаратно-программный комплекс БПЛА, соответствующий первой программе, систему приводов, топливный бак, при этом аппаратно-программный комплекс БПЛА состоит из подсистемы машинного зрения, подсистемы управления памятью, подсистемы управления, подсистемы навигации, реализованной на базе навигатора GPS или ГЛОНАСС, при этом подсистема машинного зрения и подсистема управления интегрированы в прошивку отдельных высокопроизводительных микроконтроллеров, при этом подсистема машинного зрения включает комплект бортовых датчиков, включающий ИК-камеру, блок 3D-реконструкции, блок анализа данных ИК-съемки, блок комплексирования информации, блок распознавания образов, подсистема управления памятью включает блок памяти допустимых значений диагностируемых параметров, блок хранения весовых коэффициентов сверточной нейронной сети, буфер собранных данных, базу знаний подсистемы управления, подсистема управления включает блок управления, блок прогнозирования траектории полета, блок формирования управляющих воздействий, блок координации, блок самодиагностики, кроме того, центральный сервер включает аппаратно-программный комплекс центрального сервера, соответствующий второй программе, приемо-передающую антенну с радиусом охвата в 240 км, обеспечивающую радиомост непосредственно между БПЛА, между БПЛА и центральным сервером со скоростью не менее 50 Мбит/с, устройство ввода, устройство вывода, при этом результатом работы центрального сервера является комплексная модель ЛЭП, включающая трехмерную модель ЛЭП и охранной зоны, ИК-модель ЛЭП и охранной зоны, детализованные трехмерные, ИК-модели отдельных элементов ЛЭП с указанием типов и географических координат этих элементов, стрела провиса проводов, угол наклона опор ЛЭП, смещение опор ЛЭП, прогноз развития идентифицированных угроз и опасных ситуаций, перечень рекомендаций для ЛПР по устранению выявленных на ЛЭП угроз и опасных ситуаций, отличающаяся тем, что применяемые БПЛА оснащены электродвигателем и аккумуляторной батареей, приемо-передающей антенной, представляющей модуль спутниковой связи, обеспечивающий обмен сообщениями объемом не менее 1 кБайт с частотой не менее одного сообщения в минуту, фотограмметрической камерой, формирующих комплексную модель участка ЛЭП и охранной зоны, включающих трехмерную, ИК-модели, перечень идентифицированных элементов ЛЭП, а также объектов охранной зоны, перечень идентифицированных угроз и опасных ситуаций, при этом БПЛА делятся на основные и резервные, находящиеся в подчинении у основных и используются для более детального обследования ЛЭП и охранной зоны, автоматический комплекс обслуживания объединен со станцией базирования БПЛА, которая устанавливается на трансформаторных подстанциях, обеспечивает одновременную зарядку аккумуляторной батареи двух БПЛА.
Изобретение поясняется следующими иллюстрациями.
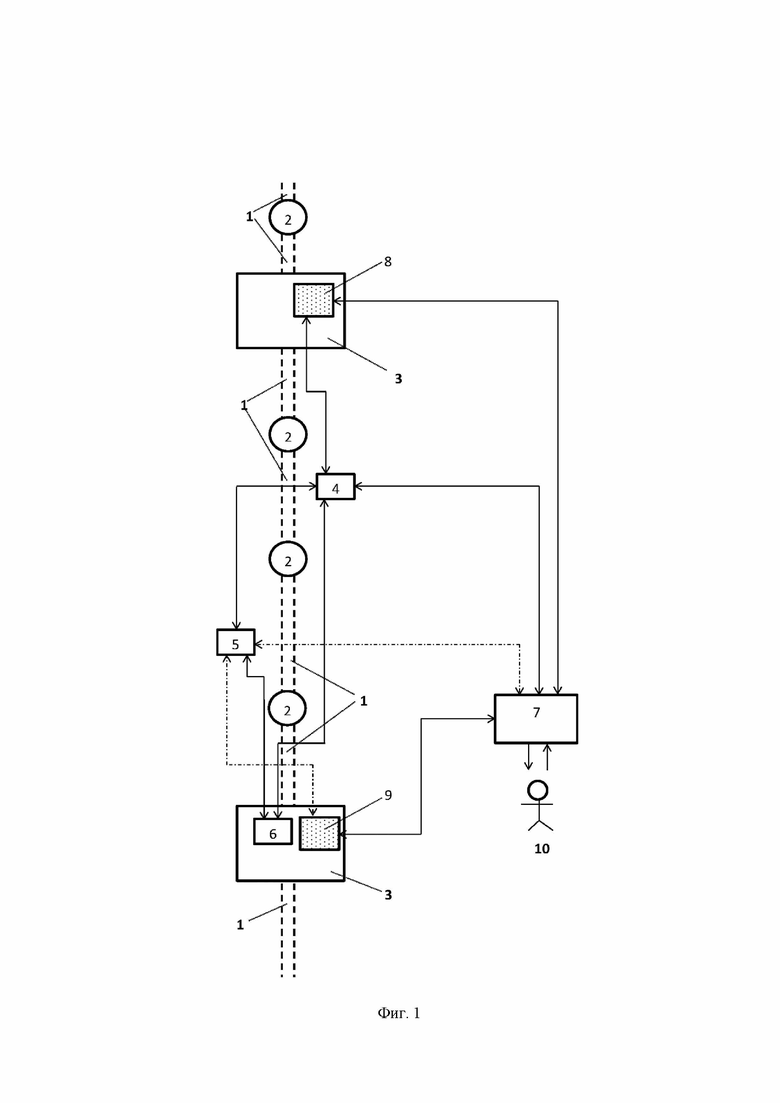
На фиг.1 изображена общая схема системы.
На фиг.1 изображены:
1 - линия электропередачи (ЛЭП);
2 - опоры ЛЭП;
3 - трансформаторные подстанции;
4-6 - БПЛА (геликоптеры), оснащенные электрическим двигателем и аккумуляторной батареей, фотограмметрической камерой, ИК-камерой, приемо-передающей антенной (должна обеспечивать связь с базовыми станциями в формате текстовых сообщений, может представлять GSM-модуль или модуль спутниковой связи), микропроцессором и постоянным запоминающим устройством, полностью автономны от оператора, ориентацию в пространстве осуществляют на основании подсистем машинного зрения и навигации. При этом БПЛА 4-5 - являются основными, 6 - резервным (включается в работу в следующих случаях: при необходимости съемки отдельных элементов ЛЭП, угроз, опасных ситуаций с высокой степенью детализации; при необходимости обеспечения облета участка ЛЭП с высокой степенью интенсивности);
7 - центральный сервер (высокопроизводительная ЭВМ);
8, 9 - станции базирования и автоматического обслуживания БПЛА (далее базовые станции). Устанавливаются на трансформаторных подстанциях, представляет собой бокс, в который приземляется БПЛА, обеспечивающий анализ технического состояния БПЛА, зарядку аккумуляторной батареи. Скачивают информацию, накопленную за время полета на внутренние носители, обеспечивает вылет геликоптера по графику облета, передает информацию, собранную геликоптерами, на центральный сервер. Включают приемо-передающую антенну с радиусом охвата в 240 км., обеспечивающую радиомост с центральным сервером со скоростью не менее 50 Мбит/с (может быть заменена на эквивалентную приемо-передающую антенну, используемую для нужд трансформаторной подстанции). Базовые станции должны обеспечивать одновременную подзарядку двух БПЛА. Расстояние между базовыми станциями 8-9 должно подбираться с таким расчетом, чтобы у БПЛА хватило заряда аккумуляторной батареи для его пролета (например, для ВЛ 35 кВ среднее расстояние между трансформаторными подстанциями примерно 35 км.);
10 - лицо, принимающее решение (ЛПР).
В сравнении с устройством RU 2 789 896 C1 «Интеллектуальная система автоматического дистанционного мониторинга состояния ЛЭП» также внесены изменения в следующие элементы:
1) Объединены элементы автоматический комплекс обслуживания и базовая станция в элемент «станция базирования и автоматического обслуживания БПЛА», который располагается на трансформаторных подстанциях, служит для временного хранения информации, собранной БПЛА, для связи с центральным сервером, базирования БПЛА и зарядки аккумуляторной батареи.
2) Центральный сервер: подсистема обработки данных, полученных от БПЛА: исключен блок формирования УФ-модели ЛЭП, а также окружающего пространства.
3) БПЛА:
- топливный бак заменен на аккумуляторную батарею;
- приемо-передающая антенна (масса - не более 0,3 кг, ширина полосы - 80/40/20/10/5 МГц, скорость передачи данных - 50 - 300 Мбит/с в радиусе не менее 240 км) заменена на приемо-передающую антенну (GSM-модуль или модуль спутниковой связи, обеспечивающий обмен сообщениями объемом не менее 1 кБайт с частотой не менее одного сообщения в минуту).
4) Подсистемы машинного зрения БПЛА:
- лазерное сканирующее устройство с функцией определения цветности точек заменено на фотограмметрическую камеру;
- исключены УФ-камера, блок анализа данных УФ-съемки.
Далее приводится описание работы системы.
1) Центральный сервер 7 на основании координат ЛЭП, введенных ЛПР 10, формирует полетное задание и передает его на БПЛА 4-5.
Полетное задание имеет следующий формат:
{<ptE>, sb, reg, int},
где ptE - координаты конечной точки траектории, формируемой БПЛА (в качестве начальной точки берется базовая станция, на которой находится БПЛА в данный момент, например 9, конечной точкой может быть только другая базовая станция, например 8), sb - параметры полосы сканирования (координаты левой нижней точки, ширина полосы), reg - режим работы БПЛА (за исключением аварийного режима, который может быть активирован только в процессе работы), в частности:
а) мониторинг угроз и опасных ситуаций;
б) мониторинг угроз и опасных ситуаций и формирование комплексной модели ЛЭП и охранной зоны;
int - степень интенсивности полетов БПЛА:
- высокая - облет ЛЭП выполняют все три БПЛА (4-6), после выполнения зарядки аккумуляторной батареи БПЛА сразу возвращается к работе;
- средняя - облет участка ЛЭП выполняется с временным интервалом менее 3-х часов, к облету привлекаются БПЛА 4-5, БПЛА 6 включается в работу в случаях: при необходимости съемки отдельных элементов ЛЭП, угроз, опасных ситуаций с высокой степенью детализации; при необходимости обеспечения облета участка ЛЭП с высокой степенью интенсивности;
- низкая - облет участка ЛЭП выполняется с временным интервалом 3 часа и более к облету привлекаются БПЛА 4-5, БПЛА 6 включается в работу в случаях: при необходимости съемки отдельных элементов ЛЭП, угроз, опасных ситуаций с высокой степенью детализации; при необходимости обеспечения облета участка ЛЭП с высокой степенью интенсивности.
Актуальность комплексной модели ЛЭП и охранной зоны (включает трехмерную модель и термограмму) может сохраняться на протяжении длительного времени. Следовательно, нет необходимости в формировании комплексной модели при каждом вылете группы БПЛА. Выделение режимов работы («мониторинг угроз и опасных ситуаций», «мониторинг угроз и опасных ситуаций и формирование комплексной модели ЛЭП и охранной зоны») позволит снизить нагрузку на вычислительные системы и системы связи БПЛА.
При этом под элементом ЛЭП (идентифицируются по результатам лазерного сканирования) понимаются провода, опоры, изоляторы, трансформаторы, под объектом охранной зоны (идентифицируются по результатам лазерного сканирования) - деревья, кустарники, объекты антропогенного характера (автомобили), люди.
Под опасной ситуацией (идентифицируются по результатам лазерного сканирования, ИК и УФ-съемки) понимаются ситуации следующих видов:
- пожар;
- перегрев элементов ЛЭП;
- коронные разряды на дефектных изоляторах;
- падение деревьев на провода или опоры ЛЭП;
- обледенение проводов.
При этом под угрозой (идентифицируются по результатам лазерного сканирования и ИК-съемки) понимаются ситуации следующих видов:
- нависание дерева с риском падения на ЛЭП;
- сужение ширины просеки ЛЭП за счет роста деревьев и кустарников;
- видимые повреждения опор, проводов, изоляторов, трансформаторов;
- присутствие в охранной зоне группы ЛЭП неустановленных лиц.
2) БПЛА 4-5 выполняют крупномасштабную съемку ЛЭП 1 и ее охранной зоны с помощью следующих бортовых датчиков: фотограмметрическая камера, ИК-камера. БПЛА 4-5 (при высокой степени интенсивности полетов - БПЛА 4-6) летят друг за другом на расстоянии, преодолеваемом ими за время не менее 2-х минут с максимальной скоростью. БПЛА с временным интервалом в 1 минуту обмениваются друг с другом и с базовой станцией сообщениями с текущими координатами в следующем формате:
<id,gc>,
где id - уникальный идентификатор БПЛА, отправившего сообщение; coord - географические координаты БПЛА в момент отправки сообщения.
Высота полета БПЛА должна допускать ширину съемки, полностью включающую ЛЭП и охранную зону. При этом должна обеспечиваться возможность различать объекты размером в 1 см.
Недостатком фотограмметрической камеры в сравнении с лазерным сканером, является невозможность съемки в темное время суток. Однако для ориентации БПЛА в темное время суток (вместо фотограмметрической камеры) может быть использована ИК-камера, которая также позволит оперативное идентифицировать такие угрозы, как присутствие в охранной зоне группы ЛЭП неустановленных лиц (вероятность противоправных действий со стороны таких лиц в темное время суток, как правило, выше), и опасные ситуации, как перегрев элементов ЛЭП.
В случае если сообщение с текущими координатами от одного БПЛА (далее - аварийный БПЛА) не было получено другими БПЛА и базовой станцией, БПЛА переходят в аварийный режим работы и выполняют следующие действия:
- исправный БПЛА облетает территорию с центром в последней точке, координаты которой были переданы аварийным БПЛА, с радиусом, равным расстоянию, преодолеваемому БПЛА за время не менее 2-х минут с максимальной скоростью);
- при обнаружении аварийного БПЛА посылается сигнал на центральный сервер 7;
- если в воздухе находились три БПЛА, то оставшийся БПЛА продолжает выполнять облет ЛЭП.
В режиме работы «мониторинг угроз и опасных ситуаций» (может быть активирован как в светлое, так и в темное время суток) БПЛА 4-5 (4-6 при высокой степени интенсивности работ) выполняют облет ЛЭП, выполняют идентификацию угроз и опасных ситуаций на ЛЭП и в охранной зоне. В случае обнаружения угрозы или опасной ситуации, БПЛА выполняет ее съемку и сохраняет в постоянной памяти (в светлое время суток для съемки используется фотограмметрическая камера, в темное время суток - ИК-камера). Текстовые сообщения об обнаруженных угрозах и опасных ситуациях в режиме реального времени передаются на центральный сервер 7 и ближайшую базовую станцию 8-9 (в случае отсутствия связи с центральным сервером). Базовая станция 8-9, обладающая более мощной приемо-передающей антенной, чем БПЛА, передает полученную информацию на центральный сервер 7. Для более детальной съемки угрозы или опасной ситуации центральный сервер может направить резервный БПЛА 6.
Формат текстовых сообщений об обнаружении угроз или опасных ситуаций:
<ids,ts, gc>, где ids - идентификатор угрозы или опасной ситуации, ts - тип (класс) угрозы или опасной ситуации, gc - географические координаты опасной ситуации.
Режим работы «мониторинг угроз и опасных ситуаций и формирование комплексной модели ЛЭП и охранной зоны», помимо действий, выполняемых в рамках режима работы «мониторинг угроз и опасных ситуаций», также предполагает формирование на БПЛА данных в следующих форматах:
- Перечень идентифицированных элементов ЛЭП, а также объектов охранной зоны, состоящий из элементов следующего вида:
<id,to, gc>, где id - идентификатор объекта, to - тип (класс) объекта, gc - географические координаты объекта.
- Комплексная модель участка ЛЭП и охранной зоны на основе облака точек, в котором каждая точка имеет следующее описание:
<x,y,z,c,t,u,id, ids>
где x,y,z - пространственные координаты точки; c - цветность; t - пиксель термограммы, соответствующий точке x,y,z; id - идентификатор объекта, которому принадлежит данная точка (если точка не принадлежит объекту, то id=null); ids - идентификатор опасной ситуации (различаемой БПЛА самолетного типа), которой принадлежит данная точка (если точка не принадлежит опасной ситуации, то ids=null).
3) БПЛА 4-5 периодически выполняет самодиагностику. При этом контролируются следующие параметры: текущий уровень топлива, состояние микропроцессоров, памяти, приводов, датчиков, навигационной подсистемы.
3.1) Если обнаружены критические неполадки микропроцессоров, памяти, приводов, датчиков (фотограмметрической камеры в светлое время суток, ИК-камеры в темное время суток), навигационной подсистемы принимается решение о срочном возвращении на ближайшую базовую станцию 8-9.
3.2) В случае, если у БПЛА обнаружен низкий уровень заряда аккумуляторной батареи, то принимается решение о его немедленном перемещении к ближайшей базовой станции 8-9. Если текущего уровня заряда аккумуляторной батареи недостаточно для базовой станции 8-9, то БПЛА совершает посадку в пределах охранной зоны ЛЭП и активирует аварийный режим работы.
4) БПЛА 4-6 выгружают собранную визуальную информацию.
БПЛА 4-6 после выполнения облета участка ЛЭП и посадки выгружают всю собранную визуальную информацию (а именно, фото и видео угроз и опасных ситуаций, перечень идентифицированных элементов ЛЭП, а также объектов охранной зоны, комплексная модель участка ЛЭП и охранной зоны) на постоянные запоминающие устройства, расположенные на базовых станциях 8-9. Базовые станции 8-9 через приемо-передающие антенны передают загруженную визуальную информацию на центральный сервер 7.
5) В зависимости от полученных от БПЛА 4-6 (через базовые станции 8-9) данных центральный сервер 7 выполняет следующие действия:
5.1) В режиме работы «мониторинг угроз и опасных ситуаций» (п.1, а) центральный сервер 7 выполняет анализ информации, полученной от БПЛА 4-6, на основании которой могут быть выполнены следующие действия:
а) Центральный сервер 7 незамедлительно сигнализирует об опасной ситуации ЛПР 10. В случае обнаружения угрозы достаточно оповещения ЛПР 10 в текстовом виде. В обоих случаях центральный сервер 7 предоставляет ЛПР 10 перечень рекомендаций по устранению обнаруженной угрозы или опасной ситуации.
б) Центральный сервер 7 записывает в постоянную память информацию об угрозе или опасной ситуации.
в) На основании сохраненных в постоянной памяти описаний угроз опасных ситуаций, происходивших ранее, сервер 7 выполняет прогноз развития текущей угрозы или опасной ситуации, а также оценивает вероятность потенциального возникновения угроз и опасных ситуаций на различных участках ЛЭП.
5.2) В режиме работы «мониторинг угроз и опасных ситуаций и формирование комплексной модели ЛЭП и охранной зоны» помимо действий, выполняемых в рамках режима «мониторинг угроз и опасных ситуаций» по полученным от БПЛА 4-6 данным (комплексная модель участка ЛЭП и охранной зоны; комплексные модели элементов ЛЭП, объектов охранной зоны, угроз, опасных ситуаций; перечень идентифицированных элементов ЛЭП, а также объектов охранной зоны; перечень идентифицированных угроз и опасных ситуаций) формирует комплексную модель ЛЭП 1, которая включает:
- трехмерную модель ЛЭП и охранной зоны;
- ИК-модель ЛЭП и охранной зоны;
- трехмерные, ИК-модели отдельных элементов ЛЭП с указанием типов и географических координат этих элементов.
Центральный сервер выполняет анализ трехмерной модели ЛЭП и охранной зоны с целью определения следующих параметров:
- стрела провиса проводов;
- угол наклона опор ЛЭП;
- смещение опор ЛЭП.
На основании трехмерной модели ЛЭП и охранной зоны центральный сервер выполняет выявление новых опасных ситуаций («пляска проводов»).
На основании ретроспективных комплексных моделей ЛЭП выполняет прогнозирование развития идентифицированных угроз и опасных ситуаций.
Формируется перечень рекомендаций для ЛПР по устранению выявленных на ЛЭП угроз и опасных ситуаций.
Таким образом, из приведенных иллюстраций видно, что достигается поставленная техническая задача, а именно устранение недостатков прототипа, а также повышение скорости и качества мониторинга состояния ЛЭП.
Интеллектуальная система автоматического дистанционного мониторинга состояния и безопасности ЛЭП в непрерывном режиме содержит: группу всепогодных БПЛА, каждый из которых оснащен ИК-камерой и фотограмметрическая камерой, электродвигателем и аккумуляторной батареей, при этом аппаратно-программный комплекс БПЛА состоит из подсистемы машинного зрения, подсистемы управления памятью, подсистемы управления, подсистемы навигации, реализованной на базе навигатора GPS или ГЛОНАСС, блока 3D-реконструкции, блока анализа данных ИК-съемки, блока комплексирования информации, блока распознавания образов, а подсистема управления памятью включает блок памяти допустимых значений диагностируемых параметров, блок хранения весовых коэффициентов сверточной нейронной сети, буфер собранных данных, базу знаний подсистемы управления; станции базирования и автоматического обслуживания БПЛА (далее базовые станции), установленные на трасформаторных подстанциях на определенном расстоянии друг от друга и выполненные с возможностью подзарядки и контроля технического состояния БПЛА; центральный сервер, выполненный с возможностью приема и обработки данных, полученных с БПЛА, аналитики видеопотока, формирования отчетов, команд на изменение полетного задания, архивации информации и отправки ответственным лицам. Обеспечивается повышение скорости и качества мониторинга состояния ЛЭП. 1 ил.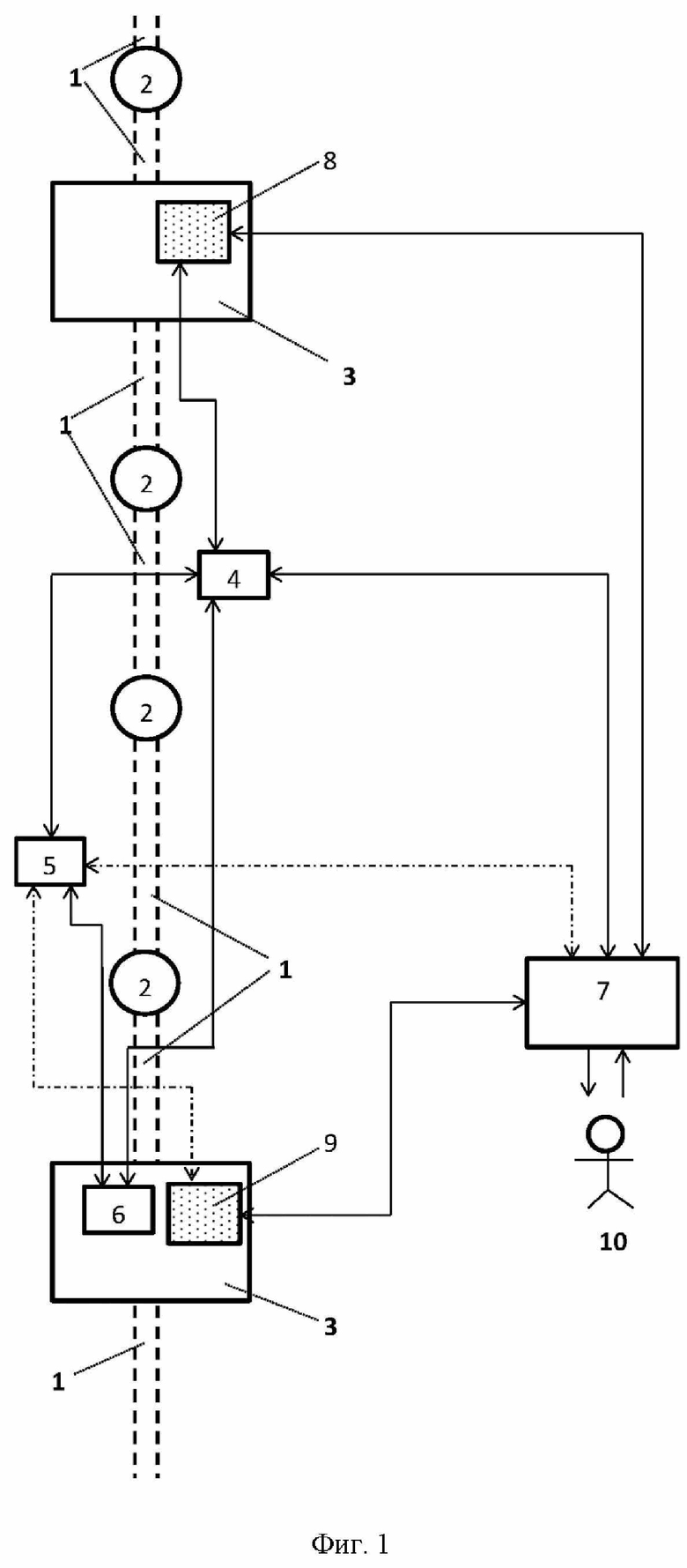
Интеллектуальная система автоматического дистанционного мониторинга состояния и безопасности ЛЭП в непрерывном режиме, состоящая из группы всепогодных БПЛА, автоматизированного комплекса обслуживания, центра обработки информации и программного обеспечения, при этом каждый БПЛА оснащен ИК-камерой и управляется двумя программами, при этом первая отвечает за непосредственное управление аппаратом, высоту, скорость полета, сканирование окружающего пространства и уклонение от столкновений, контролируя условия полета, формирует адекватную реакцию на изменение погодных условий, поддерживает канал связи и передачу информации, прием команд с центрального сервера, корректирует полетное задание, вторая программа установлена на центральном сервере и осуществляет прием и обработку данных, полученных с БПЛА, осуществляет аналитику видеопотока, формирует отчеты, команды на изменение полетного задания, архивирует информацию и высылает отчеты ответственным лицам, автоматический комплекс обслуживания обеспечивает прием БПЛА, анализ технического состояния, скачивает информацию, накопленную за время полета, на внутренние носители, обеспечивает вылет БПЛА по графику облета, передает информацию на центральный сервер, комплекс работает автономно, представляет собой бокс, в который приземляется БПЛА, дополнительно бокс оборудован емкостью с жидкостью, препятствующей обледенению, и устройствами орошения винтов, при этом управление комплексом обслуживания осуществляется программным обеспечением, установленным на центральный сервер, центральный сервер выполнен с возможностью расположения в любом удобном для работы месте, осуществляет функции приема, накопления и хранения информации, обеспечивает постоянную аналитику получаемой информации, осуществляет рассылку, содержащую сведения аналитики, формирует сводную справку о результатах контроля и анализа происшествий и состояния контролируемых объектов, оборудования, осуществляет доступ сотрудников к архивам и базам данных, БПЛА вне зависимости от типа включает аппаратно-программный комплекс БПЛА, соответствующий первой программе, систему приводов, топливный бак, при этом аппаратно-программный комплекс БПЛА состоит из подсистемы машинного зрения, подсистемы управления памятью, подсистемы управления, подсистемы навигации, реализованной на базе навигатора GPS или ГЛОНАСС, при этом подсистема машинного зрения и подсистема управления интегрированы в прошивку отдельных высокопроизводительных микроконтроллеров, при этом подсистема машинного зрения включает комплект бортовых датчиков, включающий ИК-камеру, блок 3D-реконструкции, блок анализа данных ИК-съемки, блок комплексирования информации, блок распознавания образов, подсистема управления памятью включает блок памяти допустимых значений диагностируемых параметров, блок хранения весовых коэффициентов сверточной нейронной сети, буфер собранных данных, базу знаний подсистемы управления, подсистема управления включает блок управления, блок прогнозирования траектории полета, блок формирования управляющих воздействий, блок координации, блок самодиагностики, кроме того, центральный сервер включает аппаратно-программный комплекс центрального сервера, соответствующий второй программе, приемо-передающую антенну с радиусом охвата в 240 км, обеспечивающую радиомост непосредственно между БПЛА, между БПЛА и центральным сервером со скоростью не менее 50 Мбит/с, устройство ввода, устройство вывода, при этом результатом работы центрального сервера является комплексная модель ЛЭП, включающая трехмерную модель ЛЭП и охранной зоны, ИК-модель ЛЭП и охранной зоны, детализованные трехмерные ИК-модели отдельных элементов ЛЭП с указанием типов и географических координат этих элементов, стрелы провиса проводов, угла наклона опор ЛЭП, смещения опор ЛЭП, прогноза развития идентифицированных угроз и опасных ситуаций, перечень рекомендаций для ЛПР по устранению выявленных на ЛЭП угроз и опасных ситуаций, отличающаяся тем, что применяемые БПЛА оснащены электродвигателем и аккумуляторной батареей, приемо-передающей антенной, представляющей модуль спутниковой связи, обеспечивающий обмен сообщениями объемом не менее 1 кБайт с частотой не менее одного сообщения в минуту, фотограмметрической камерой, формирующими комплексную модель участка ЛЭП и охранной зоны, включающую трехмерные ИК-модели, перечень идентифицированных элементов ЛЭП, а также объектов охранной зоны, перечень идентифицированных угроз и опасных ситуаций, при этом БПЛА делятся на основные и резервные, находящиеся в подчинении у основных и использующиеся для более детального обследования ЛЭП и охранной зоны, автоматический комплекс обслуживания объединен со станцией базирования БПЛА, которая устанавливается на трансформаторных подстанциях, обеспечивает одновременную зарядку аккумуляторной батареи двух БПЛА.
| Интеллектуальная система автоматического дистанционного мониторинга состояния ЛЭП | 2022 |
|
RU2789896C1 |
| ОБНАРУЖЕНИЕ СОСТОЯНИЯ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ СИСТЕМЫ ОБРАБОТКИ ИЗОБРАЖЕНИЯ, СООТВЕТСТВУЮЩИЙ СПОСОБ И ПОСТОЯННЫЙ МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ | 2015 |
|
RU2694016C1 |
| US 20180357788 A1, 13.12.2018 | |||
| US 20210173414 A1, 10.06.2021 | |||
| US 11038384 B2, 15.06.2021 | |||
| JP 4049803 A, 19.02.1992. | |||

