Изобретение относится к системам автоматического дистанционного мониторинга протяженных объектов с помощью беспилотных летательных аппаратов (БПЛА) и может быть использовано в электроэнергетике для контроля состояния линий электропередачи и электроподстанций, установленных на участках значительной протяженности.
Известно устройство «Автоматический беспилотный комплекс диагностики состояния протяженных объектов, оснащенных собственной информационной системой» RU 2 464 643 C1.
Автоматический беспилотный комплекс диагностики состояния протяженных объектов, оснащенных собственной информационной системой, содержащий дистанционно пилотируемый летательный аппарат (ДПЛА) вертолетного типа, на котором установлены подсоединенные к первой информационной шине (ИШ) система автоматического управления с блоком управления бортовыми системами, система автоматического дистанционного управления полетом ДПЛА и работой его систем, бортовая система диагностики состояния протяженных объектов (БСДСПО) с комплектом бортовых датчиков и бортовая приемопередающая аппаратура радиотелеметрической системы (БАРТС) с приемной и передающей антеннами, а также содержит мобильный наземный пункт управления (МНПУ) ДПЛА, состоящий из подсоединенных ко второй ИШ пульта управления ДПЛА, пульта управления БСДСПО и наземной приемопередающей аппаратуры радиотелеметрической системы (НАРТС) с приемной и передающей антеннами, при этом МНПУ ДПЛА подключен модемом к многоканальной линии передачи данных (МКЛПД), объединяющей центральный узел эксплуатации протяженного объекта (ЦПЭПО) и N локальных пунктов протяженного объекта (ЛП), а также не менее чем N установленных на ЛП наземных подсистем диагностики состояния протяженных объектов (НПДСПО), каждая из которых состоит из пульта наземной диагностики (ПНД) и комплекта встроенных датчиков, подсоединенных к третьей ИШ, и размещенных вблизи участка протяженного объекта комплекта автономных датчиков, при этом ПНД подключен модемом к МКЛПД и к НАРТС с приемной и передающей антеннами, отличающийся тем, что в БСДСПО и в каждую НПДСПО дополнительно введены преобразователь значений выходных сигналов комплекта бортовых датчиков БСДСПО и комплекта автономных датчиков НПДСПО и преобразователь значений выходных сигналов комплекта встроенных датчиков НПДСПО в количественные значения признаков соответствия фактических значений диагностируемых параметров состояния протяженного объекта допустимым, который выполнен в виде последовательно соединенных блока памяти допустимых значений диагностируемых параметров, четных входов блока элементов «И» и вычислителя, при этом комплект бортовых датчиков БСДСПО и комплект встроенных датчиков НПДСПО подключены к нечетным входам соответствующих блоков элементов «И», выходы вычислителей БСДСПО и НПДСПО подсоединены соответственно к первой и четвертой ИШ, а также в состав пульта управления БСДСПО МНПУ, в состав каждого ПНД НПДСПО и в ЦПЭПО дополнительно введено по одному подсоединенному соответственно ко второй, третьей и четвертой ИШ программному модулю, обеспечивающему формирование цветографических образов (ЦГО) состояния протяженного объекта. Технический результат устройства - расширение функциональных возможностей устройства в части одновременного компактного представления разнородной диагностической информации о состоянии протяженного объекта и его изменениях и повышение за счет этого оперативности и точности диагностики состояния протяженных объектов.
Недостатками известного устройства являются:
1) Применение одного БПЛА, что оказывает негативное влияние на следующие факторы:
- производительность (для выполнения обследования ЛЭП требуется больше времени в сравнении с группой БПЛА);
- точность результата (получение подробной модели ЛЭП, выполненной в крупном масштабе, осложняется как необходимостью подзарядки аккумуляторной батареи, либо дозаправки БПЛА, так и существенными временными затратами, связанными с подробной съемкой каждого элемента ЛЭП);
- ограничение числа одновременно применяемых датчиков (одновременное применение датчиков нескольких типов ограничено грузоподъемностью БПЛА, существенными объемами потребления заряда аккумуляторной батареи, либо топлива).
2) БПЛА не оснащен подсистемой машинного зрения, позволяющей существенно повысить его возможности в плане функционирования в автономном от оператора режиме.
3) Отсутствие функции автоматического выявления проблемных ситуаций (дефекты опор, проводов, изоляторов, упавшие деревья, перегрев элементов ЛЭП, пожары, наводнения в защитной зоне ЛЭП) по вычисленным количественным параметрам, прогнозирования их развития, а также формирования рекомендаций для их устранения.
4) Отсутствие функции формирования трехмерной модели ЛЭП и ее защитной полосы с автоматической идентификацией элементов ЛЭП, которая позволит выполнить оценку текущего состояния ЛЭП, сформировать (или уточнить) чертежи и прочую документацию, произвести анализ на предмет ее реконструкции.
Известно устройство RU 174 052 U1 «Программно-аппаратный комплекс мониторинга состояния воздушных линий электропередач», содержащее беспилотный летательный аппарат 1, на борту которого расположены цифровая фотокамера 2, тепловизионный сканер 3, лазерный сканер 4, навигационный GPS_ГЛОНАСС приемник 5 и инерциальная навигационная система 6. Кроме того, устройство содержит информационно-вычислительный блок 7, находящийся на борту беспилотного летательного аппарата 1 и выполненный с возможностью связи с наземной станцией оператора 8. Технический результат – расширение функциональных возможностей устройства мониторинга состояния воздушных линий электропередач , выполненного в виде летательного средства, в части одновременного получения комплексной диагностической информации о состоянии линий электропередач и повышения за счет этого оперативности и точности.
Недостатками известного устройства являются:
1) Применение одного БПЛА, что оказывает негативное влияние на следующие факторы:
- производительность (для выполнения обследования ЛЭП требуется больше времени в сравнении с группой БПЛА);
- точность результата (получение подробной модели ЛЭП, выполненной в крупном масштабе, осложняется как необходимостью подзарядки аккумуляторной батареи, либо дозаправки БПЛА, так и существенными временными затратами, связанными с подробной съемкой каждого элемента ЛЭП);
- ограничение числа одновременно применяемых датчиков (одновременное применение датчиков нескольких типов ограничено грузоподъемностью БПЛА, существенными объемами потребления заряда аккумуляторной батареи, либо топлива).
2) Отсутствие функции автоматического выявления проблемных ситуаций (дефекты опор, проводов, изоляторов, упавшие деревья, перегрев элементов ЛЭП, пожары, наводнения в защитной зоне ЛЭП) по вычисленным количественным параметрам, прогнозирования их развития, а также формирования рекомендаций для их устранения.
3) Большое количество датчиков, установленных на БПЛА, влечет существенные объемы потребления электроэнергии и, как следствие, необходимость частой подзарядки, либо дозаправки БПЛА в процессе работы.
4) Отсутствие возможности передачи результатов мониторинга ЛЭП на наземную станцию в процессе полета БПЛА, что позволило бы ускорить процедуру обработки этих данных (на наземной станции), а также снизило бы риски утери этих данных в результате крушения или повреждения БПЛА.
Наиболее близким к заявляемому техническому решению по технической сущности и достигаемому техническому результату является устройство RU 2 748 134 C1 «Роботизированный комплекс контроля линий электропередач и электроподстанций».
Роботизированный комплекс системы активного мониторинга и центра получения и обработки информации, отличающийся тем, что система активного мониторинга состоит из всепогодного геликоптера, системы связи и передачи информации, автоматизированного комплекса обслуживания, центра обработки информации и программного обеспечения; геликоптер управляется двумя программами, при этом первая установлена на его внутреннем носителе и отвечает за непосредственное управление аппаратом, высоту, скорость полета, сканирование окружающего пространства и уклонение от столкновений, контролируя условия полета, формирует адекватную реакцию на изменение погодных условий, поддерживает канал связи и передачу информации, прием команд с центрального сервера, корректирует полетное задание, вторая программа установлена на центральном сервере и осуществляет прием и обработку данных полученных с геликоптера, осуществляет аналитику видеопотока, формирует отчеты, команды на изменение полетного задания, архивирует информацию и высылает отчеты ответственным лицам;
система связи и передачи информации состоит из комплектов автономного оборудования, представляющего собой точки доступа и линии связи, установленные через семь километров по маршруту движения, образующие бесшовное поле wi-fi, по всему маршруту полета, комплекты соединены между собой радиомостами и обеспечивают передачу информации между геликоптером и центральным сервером, со скоростью не менее 100 Мб;
автоматический комплекс обслуживания устанавливается в середине маршрута патрулирования, комплекс обеспечивает прием геликоптера, анализ технического состояния, дозаправку, скачивает информацию, накопленную за время полета на внутренние носители, обеспечивает вылет геликоптера по графику облета, передает информацию на центральный сервер, на комплексе установлено конечное оборудование радиомостов, представляющее собой антенну радиомоста, подключенную к серверу и переход на кабельные каналы связи, комплекс работает автономно, представляет собой бокс, в который приземляется геликоптер, при этом бокс имеет оборудование связи для скачивания информации в объемах, превышающих возможности сети wi-fi, установленной по маршруту движения, в состав комплекса входит заправочная емкость и устройство для автоматической заправки, дополнительно бокс оборудован емкостью с жидкостью, препятствующей обледенению, и устройствами орошения винтов;
при этом правление комплексом обслуживания осуществляется программным обеспечением, установленным на центральный сервер; центральный сервер выполнен с возможностью расположения в любом удобном для работы месте, при условии наличия устойчивого кабельного канала связи с автоматическим комплексом обслуживания, осуществляет функции приема, накопления и хранения информации, обеспечивает постоянную аналитику получаемой информации, осуществляет рассылку, содержащую сведения аналитики, формирует сводную справку о результатах контроля и анализа происшествий и состояния контролируемых объектов, оборудования, осуществляет доступ сотрудников к архивам и базам данных.
Недостатки прототипа:
1) Применение одного БПЛА, что оказывает негативное влияние на следующие факторы:
- производительность (для выполнения обследования ЛЭП требуется больше времени в сравнении с группой БПЛА);
- точность результата (получение подробной модели ЛЭП, выполненной в крупном масштабе, осложняется как необходимостью подзарядки аккумуляторной батареи БПЛА, так и существенными временными затратами, связанными с подробной съемкой каждого элемента ЛЭП);
- ограничение числа одновременно применяемых датчиков (одновременное применение датчиков нескольких типов ограничено грузоподъемностью БПЛА, существенными объемами потребления заряда аккумуляторной батареи).
2) Отсутствие функции формирования трехмерной модели ЛЭП и ее защитной полосы с автоматической идентификацией элементов ЛЭП, которая позволит выполнить оценку текущего состояния ЛЭП, сформировать (или уточнить) информационную модель ЛЭП, выполнить построение чертежей и прочей документации (отдельных элементов ЛЭП, участков), произвести анализ на предмет необходимости ее реконструкции.
3) Установка точек доступа через семь километров по маршруту движения БПЛА, а также монтаж связывающей их линии связи (для образования бесшовного поля wi-fi) является трудоемким процессом и требует существенных финансовых затрат.
4) Установка автоматического комплекса обслуживания комплекс исключительно в середине маршрута. Понятие «середина маршрута» зависит от протяженности самого маршрута и в определенных случаях БПЛА может не хватить топлива, чтобы до нее добраться.
Технической задачей заявляемого изобретения является устранение недостатков прототипа, а также повышение скорости и качества мониторинга состояния ЛЭП.
Техническим результатом заявляемого изобретения является повышение скорости и надежности процесса мониторинга состояния ЛЭП, а также точности получаемого результата, снижение издержек, связанных с монтажом и обслуживанием системы связи и передачи информации.
Технический результат достигается тем, что интеллектуальная система автоматического дистанционного мониторинга состояния ЛЭП, состоящая из всепогодного БПЛА, автоматизированного комплекса обслуживания, центра обработки информации и программного обеспечения, БПЛА управляется двумя программами, при этом первая отвечает за непосредственное управление аппаратом, высоту, скорость полета, сканирование окружающего пространства и уклонение от столкновений, контролируя условия полета, формирует адекватную реакцию на изменение погодных условий, поддерживает канал связи и передачу информации, прием команд с центрального сервера, корректирует полетное задание, вторая программа установлена на центральном сервере и осуществляет прием и обработку данных полученных с БПЛА, осуществляет аналитику видеопотока, формирует отчеты, команды на изменение полетного задания, архивирует информацию и высылает отчеты ответственным лицам, автоматический комплекс обслуживания обеспечивает прием БПЛА, анализ технического состояния, дозаправку, скачивает информацию, накопленную за время полета на внутренние носители, обеспечивает вылет БПЛА по графику облета, передает информацию на центральный сервер, комплекс работает автономно, представляет собой бокс, в который приземляется БПЛА, в состав комплекса входит заправочная емкость и устройство для автоматической заправки, дополнительно бокс оборудован емкостью с жидкостью, препятствующей обледенению, и устройствами орошения винтов, при этом правление комплексом обслуживания осуществляется программным обеспечением, установленным на центральный сервер, центральный сервер выполнен с возможностью расположения в любом удобном для работы месте, осуществляет функции приема, накопления и хранения информации, обеспечивает постоянную аналитику получаемой информации, осуществляет рассылку, содержащую сведения аналитики, формирует сводную справку о результатах контроля и анализа происшествий и состояния контролируемых объектов, оборудования, осуществляет доступ сотрудников к архивам и базам данных, отличающаяся тем, что осуществляется применение группы всепогодных БПЛА, оснащенных лазерным сканером, ИК-камерой, УФ-камерой, формирующих комплексную модель участка ЛЭП и охранной зоны, включающих трехмерную, ИК и УФ-модели, перечень идентифицированных элементов ЛЭП, а также объектов охранной зоны, перечень идентифицированных угроз и опасных ситуаций, при этом БПЛА по уровню иерархии делятся на ведущие и вспомогательные, которые находятся в подчинении у ведущих и используются для более детального обследования ЛЭП и охранной зоны, число ведущих БПЛА составляет один на полосу шириной 30 м между правой и левой границами охранной зоны ЛЭП, число вспомогательных БПЛА на один ведущий БПЛА составляет два, если ведущий БПЛА выполняет обследование непосредственно ЛЭП, или один, если ведущий БПЛА выполняет обследование охранной зоны ЛЭП, кроме того, БПЛА вне зависимости от типа включает аппаратно-программный комплекс БПЛА, соответствующий первой программе, систему приводов, топливный бак, приемо-передающую антенну с радиусом охвата в 240 км., обеспечивающую радиомост непосредственно между БПЛА, между БПЛА и центральным сервером со скоростью не менее 50 Мбит/с, при этом аппаратно-программный комплекс БПЛА состоит из подсистемы машинного зрения, подсистемы управления памятью, подсистемы управления, подсистемы навигации, реализованной на базе навигатора GPS или ГЛОНАСС, при этом подсистема машинного зрения и подсистема управления интегрированы в прошивку отдельных высокопроизводительных микроконтроллеров, при этом подсистема машинного зрения включает комплект бортовых датчиков, включающий лазерное сканирующее устройство с функцией определения цветности точек, ИК-камеру, УФ-камеру, блок 3D-реконструкции, блок анализа данных ИК-съемки, блок анализа данных УФ-съемки, блок комплексирования информации, блок распознавания образов, подсистема управления памятью включает блок памяти допустимых значений диагностируемых параметров, блок хранения весовых коэффициентов сверточной нейронной сети, буфер собранных данных, базу знаний подсистемы управления, подсистема управления включает блок управления, блок прогнозирования траектории полета, блок формирования управляющих воздействий, блок координации, блок самодиагностики, кроме того, центральный сервер включает аппаратно-программный комплекс центрального сервера, соответствующий второй программе, приемо-передающую антенну с радиусом охвата в 240 км., обеспечивающую радиомост непосредственно между БПЛА, между БПЛА и центральным сервером со скоростью не менее 50 Мбит/с,, устройство ввода, устройство вывода, при этом результатом работы центрального сервера является комплексная модель ЛЭП, включающая трехмерную модель ЛЭП и охранной зоны, ИК-модель ЛЭП и охранной зоны, УФ-модель ЛЭП и охранной зоны, детализованные трехмерные, ИК, УФ-модели отдельных элементов ЛЭП с указанием типов и географических координат этих элементов, стрела провиса проводов, угол наклона опор ЛЭП, смещение опор ЛЭП, прогноз развития идентифицированных угроз и опасных ситуаций, перечень рекомендаций для ЛПР по устранению выявленных на ЛЭП угроз и опасных ситуаций, кроме того автоматический комплекс обслуживания включает приёмо-передающую антенну с радиусом охвата в 240 км., обеспечивающую радиомост с центральным сервером со скоростью не менее 50 Мбит/с.
Изобретение поясняется следующими иллюстрациями.
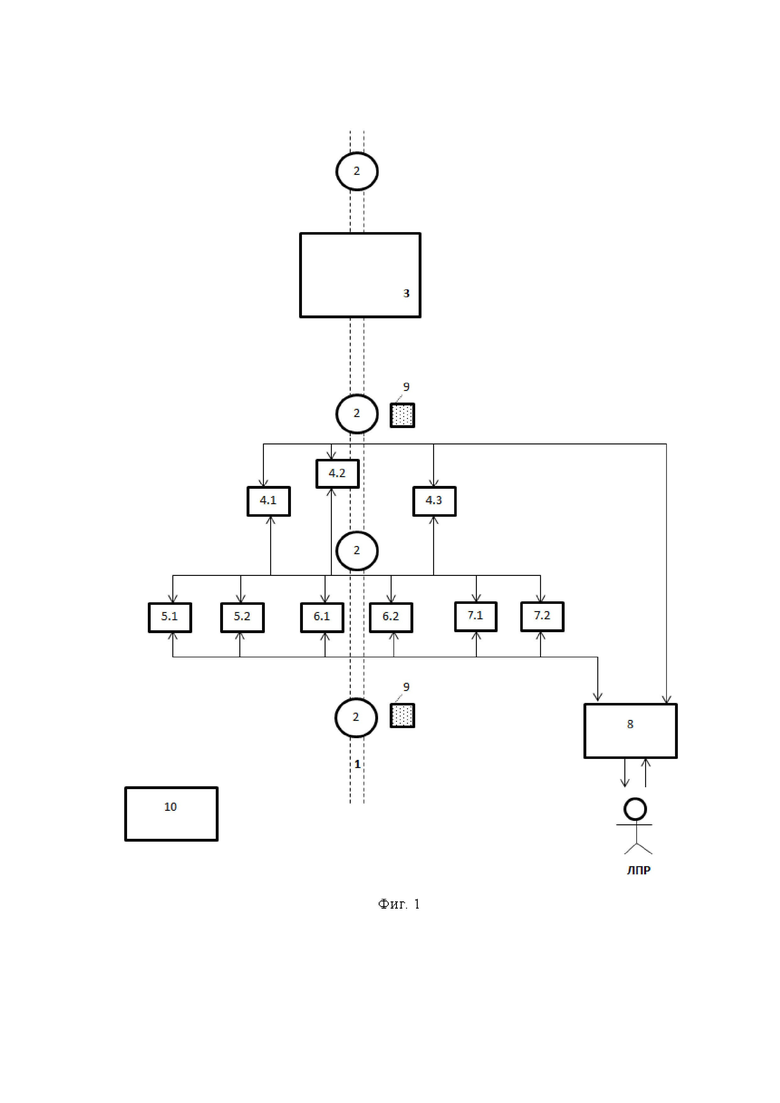
На фиг. 1 изображена общая схема системы.
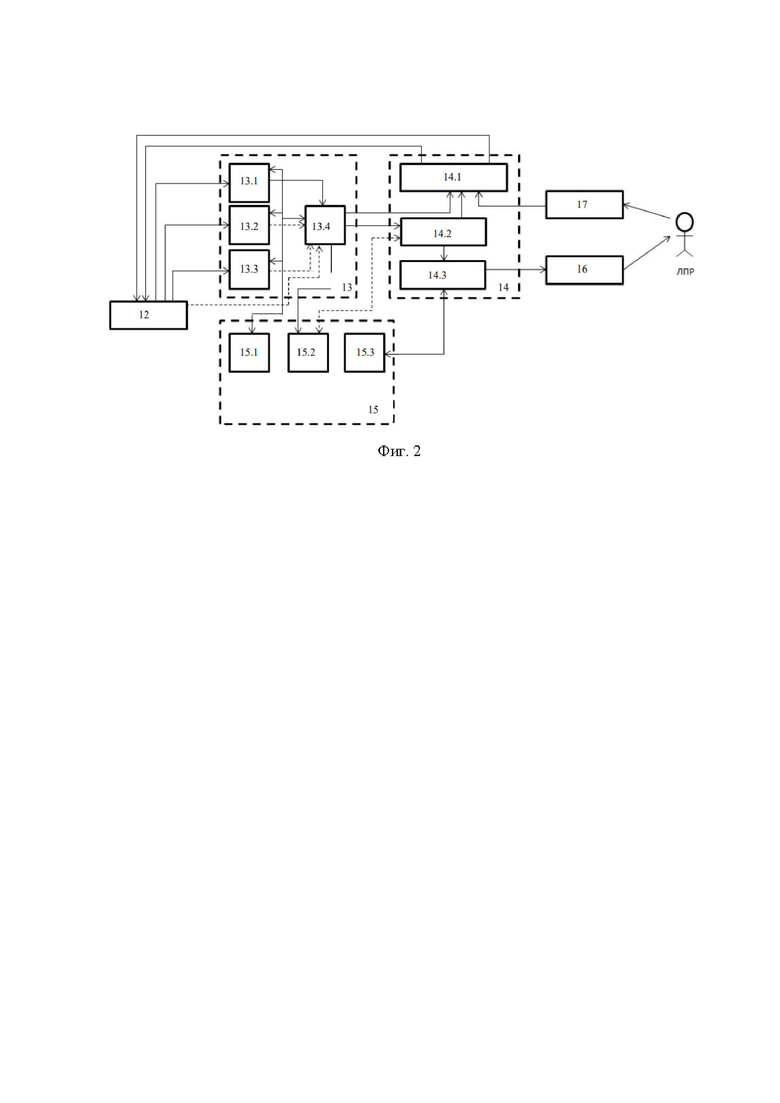
На фиг. 2 изображена схема центрального сервера.
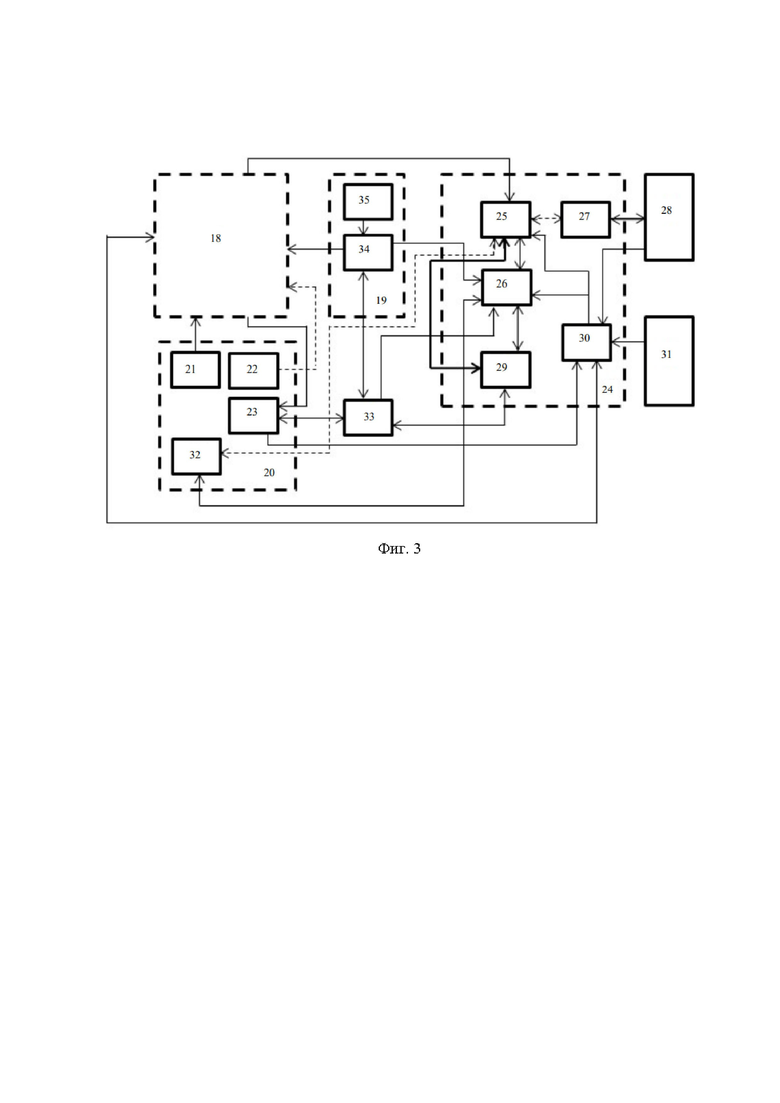
На фиг. 3 изображена схема БПЛА.
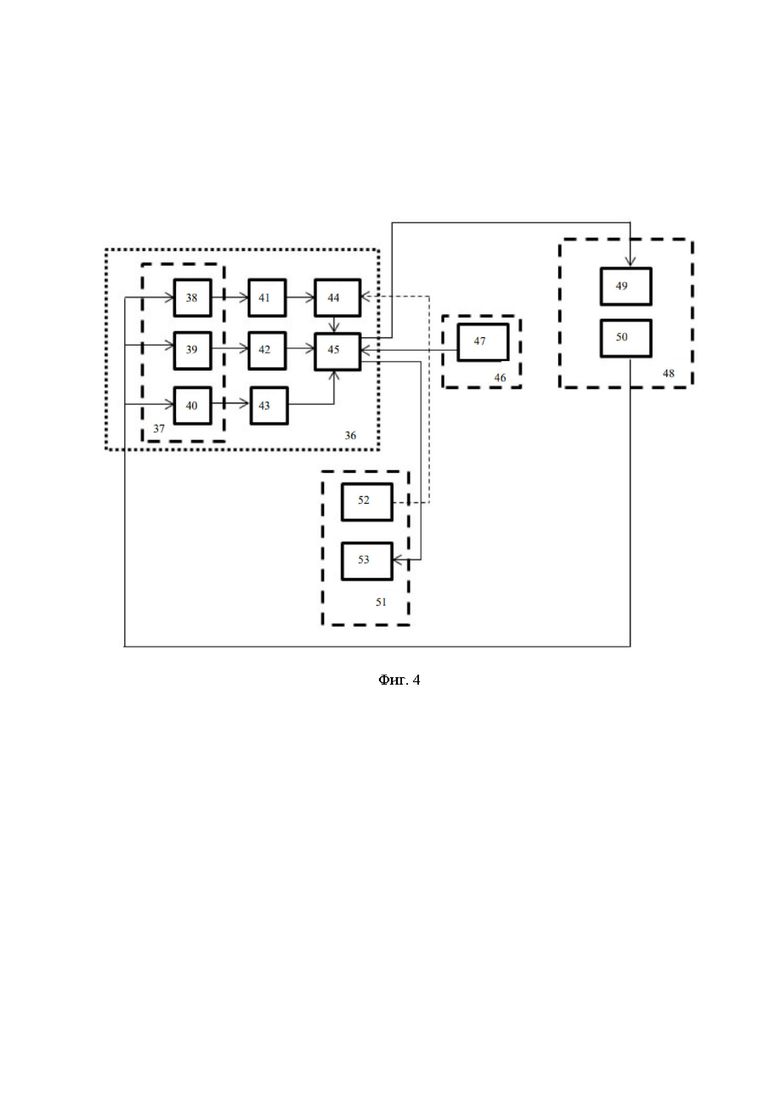
На фиг. 4 изображена схема подсистемы машинного зрения БПЛА.
На фиг. 1 изображены:
1 – линия электропередачи (ЛЭП);
2 – опоры ЛЭП;
3 – подстанция;
4.1-4.3 – ведущие БПЛА (всепогодные геликоптеры на жидком топливе, оснащены лазерным сканирующим устройством с функцией определения цветности точек, ИК-камерой, УФ-камерой, системой связи и передачи информации, микропроцессором и постоянным запоминающим устройством, полностью автономны от оператора, ориентацию в пространстве осуществляют на основании подсистем машинного зрения и навигации);
5.1-5.2 – вспомогательные БПЛА, подчиненные БПЛА 4.1 (всепогодные геликоптеры на жидком топливе, оснащены лазерным сканирующим устройством с функцией определения цветности точек, ИК-камерой, УФ-камерой, системой связи и передачи информации, микропроцессором и постоянным запоминающим устройством, полностью автономны от оператора, ориентацию в пространстве осуществляют на основании подсистем машинного зрения и навигации);
6.1-6.2 – вспомогательные БПЛА, подчиненные БПЛА 4.2 (всепогодные геликоптеры на жидком топливе, оснащены лазерным сканирующим устройством с функцией определения цветности точек, ИК-камерой, УФ-камерой, системой связи и передачи информации, микропроцессором и постоянным запоминающим устройством, полностью автономны от оператора, ориентацию в пространстве осуществляют на основании подсистем машинного зрения и навигации);
7.1-7.2 – вспомогательные БПЛА, подчиненные БПЛА 4.3 (всепогодные геликоптеры на жидком топливе, оснащены лазерным сканирующим устройством с функцией определения цветности точек, ИК-камерой, УФ-камерой, системой связи и передачи информации, микропроцессором и постоянным запоминающим устройством, полностью автономны от оператора, ориентацию в пространстве осуществляют на основании подсистем машинного зрения и навигации);
8 – центральный сервер (высокопроизводительная ЭВМ);
9 – автоматический комплекс обслуживания (устанавливается из расчетного времени снижения уровня топлива БПЛА ниже заданного порога, включает приёмо-передающую антенну с радиусом охвата в 240 км., обеспечивающую радиомост с центральным сервером со скоростью не менее 50 Мбит/с, обеспечивает прием геликоптера, анализ технического состояния, дозаправку, скачивает информацию, накопленную за время полета на внутренние носители, обеспечивает вылет геликоптера по графику облета, передает информацию на центральный сервер, комплекс работает автономно, представляет собой бокс, в который приземляется геликоптер, в состав комплекса входит заправочная емкость и устройство для автоматической заправки, дополнительно бокс оборудован емкостью с жидкостью, препятствующей обледенению, и устройствами орошения винтов);
10 – станция базирования БПЛА.
11 – ЛПР.
На фиг. 2 изображены:
12 – приемо-передающая антенна (масса – не более 0,3 кг, ширина полосы - 80/40/20/10/5 МГц, скорость передачи данных – 50-300 Мбит/с в радиусе не менее 240 км);
13 – подсистема обработки данных, полученных от БПЛА;
13.1 – блок формирования 3D-модели ЛЭП, а также окружающего ее пространства;
13.2 – блок формирования УФ-модели ЛЭП, а также окружающего пространства;
13.3 – блок формирования ИК-модели ЛЭП, а также окружающего пространства;
13.4 – блок комплексирования информации;
14 – подсистема принятия решений;
14.1 – блок генерации полетного задания;
14.2 – блок прогнозирования состояния ЛЭП;
14.3 – блок формирования рекомендаций для ЛПР;
15 – подсистема управления памятью;
15.1 – база знаний подсистемы обработки данных, полученных от БПЛА;
15.2 – база комплексных моделей ЛЭП;
15.3 – база знаний подсистемы принятия решений;
16 – устройство вывода;
17 – устройство ввода.
На фиг. 3 изображены:
18 – подсистема машинного зрения (интегрирована в прошивку отдельного высокопроизводительного микроконтроллера);
19 – подсистема навигации (реализована на базе навигатора GPS или ГЛОНАСС);
20 – подсистема управления памятью (постоянное запоминающее устройство SSD);
21 – блок памяти допустимых значений диагностируемых параметров;
22 – блок хранения весовых коэффициентов сверточной нейронной сети;
23 – буфер собранных данных;
24 – подсистема управления (интегрирована в прошивку отдельного высокопроизводительного микроконтроллера);
25 – блок управления;
26 – блок прогнозирования траектории полета;
27 – блок формирования управляющих воздействий;
28 – система приводов;
29 - блок координации;
30 - блок самодиагностики;
31 – топливный бак;
32 – база знаний подсистемы управления;
33 – приемо-передающая антенна (масса – не более 0,3 кг, ширина полосы - 80/40/20/10/5 МГц, скорость передачи данных – 50-300 Мбит/с в радиусе не менее 240 км);
34 – блок обработки информации с глобальных навигационных систем;
35 – датчики ГЛОНАСС или GPS.
На фиг. 4 изображены:
36 – подсистема машинного зрения;
37 – комплект бортовых датчиков;
38 – лазерное сканирующее устройство с функцией определения цветности точек;
39 – ИК-камера;
40 – УФ-камера;
41 – блок 3D-реконструкции;
42 – блок анализа данных ИК-съемки;
43 – блок анализа данных УФ-съемки;
44 – блок распознавания образов;
45 - блок комплексирования информации;
46 – подсистема навигации ((реализована на базе навигатора GPS или ГЛОНАСС));
47 – блок обработки информации с глобальных навигационных систем;
48 – подсистема управления;
49 – блок управления;
50 – блок самодиагностики;
51 – подсистема управления памятью;
52 – блок хранения весовых коэффициентов сверточной нейронной сети;
53 – буфер собранных данных.
Заявленный способ осуществляется следующим образом (или устройство работает следующим образом).
Процесс функционирования системы (см. фиг. 1) заключается в съемке ЛЭП, опор ЛЭП, подстанций, окружающего их пространства (охранной зоны) путем применения бортовых датчиков БПЛА (лазерный сканер с функцией определения цветности точек, ИК-камера, УФ-камера) и включает следующие этапы:
1) Центральный сервер 8 на основании координат ЛЭП, введенных ЛПР 11, формирует полетное задание и передает его на БПЛА 4.1-4.3, 5.1, 5.2, 6.1, 6.2, 7.1, 7.2. При этом полетное задание имеет следующий формат:
{<ptB>,<ptE>,uavR, sb},
где ptB, ptE – координаты начальной и конечной точек траектории, формируемой БПЛА, uavR – роль БПЛА (ведущий, вспомогательный), sb – параметры полосы сканирования (координаты левой нижней точки, ширина полосы).
При этом допускается, что координаты станции базирования 10 и координаты начальной точки траектории (ptB) могут не совпадать, в этом случае БПЛА самостоятельно формирует траекторию от станции базирования 10 до точки ptB.
2) БПЛА 4.1-4.3, 5.1, 5.2, 6.1, 6.2, 7.1, 7.2 выполняют для крупномасштабную съемку ЛЭП 1 и ее охранной зоны с помощью следующих бортовых датчиков: лазерный сканер, ИК-камера, УФ-камера.
БПЛА 4.1-4.3, 5.1, 5.2, 6.1, 6.2, 7.1, 7.2 могут формировать группы для обследования ЛЭП 1 и ее охранной зоны. При этом БПЛА данных групп не равнозначны и подразделяются на следующие типы:
- Ведущие БПЛА (4.1-4.3) - летят с опережением других БПЛА (на 100 – 500 м) и выполняют общую съемку ЛЭП и охранной зоны (вид сверху). Выполняют идентификацию элементов ЛЭП и объектов охранной зоны (координаты объектов, нуждающихся в более детальной съемке пересылаются на вспомогательные БПЛА для более детальной съемки), а также выявляют угрозы и опасные ситуации на ЛЭП и в охранной зоне. Путем генерации директив выполняют управление вспомогательными БПЛА с целью получения более детальной информации об обнаруженных угрозах и опасных ситуациях. Высота полета БПЛА должна допускать ширину съемки, полностью включающую ЛЭП и охранную зону. При этом должна обеспечиваться возможность различать объекты размером в 1 см. С увеличением ширины охранной зоны может быть увеличено число ведущих БПЛА (рекомендуемое количество ведущих БПЛА – один на полосу шириной 30 м. между правой и левой границами охранной зоны ЛЭП).
- Вспомогательные БПЛА - используются для более детальной съемки таких элементов ЛЭП, как изоляторы, опоры, трансформаторы (с возможностью различать объекты размером в 5 мм.) с целью распознавания мелких дефектов – трещины, повреждения, перегрев, коронные разряды на дефектных изоляторах. При поступлении соответствующей директивы от ведущего БПЛА выполняют более детальное обследования обнаруженных угроз и опасных ситуаций на ЛЭП и в охранной зоне.
При этом под элементом ЛЭП (идентифицируются по результатам лазерного сканирования) понимаются провода, опоры, изоляторы, трансформаторы, под объектом охранной зоны (идентифицируются по результатам лазерного сканирования) – деревья, кустарники, объекты антропогенного характера (автомобили), люди.
Под опасной ситуацией (идентифицируются по результатам лазерного сканирования, ИК и УФ-съемки) понимаются ситуации следующих видов:
- пожар;
- перегрев элементов ЛЭП;
- коронные разряды на дефектных изоляторах;
- падение деревьев на провода или опоры ЛЭП;
- обледенение проводов.
При этом под угрозой (идентифицируются по результатам лазерного сканирования и ИК-съемки) понимаются ситуации следующих видов:
- нависание дерева с риском падения на ЛЭП;
- сужение ширины просеки ЛЭП за счет роста деревьев и кустарников;
- видимые повреждения опор, проводов, изоляторов, трансформаторов;
- присутствие в охранной зоне группы ЛЭП неустановленных лиц.
Число вспомогательных БПЛА на один ведущий БПЛА рассчитывается следующим образом:
- два, если ведущий БПЛА выполняет обследование непосредственно ЛЭП;
- один, если ведущий БПЛА выполняет обследование охранной зоны ЛЭП.
Ведущие и вспомогательные БПЛА обмениваются данными о пройденных траекториях с целью недопущения их дублирования. Ведущие и вспомогательные БПЛА также обмениваются друг с другом данными о планируемых траекториях с целью недопущения помех друг другу.
3) БПЛА 4.1-4.3, 5.1, 5.2, 6.1, 6.2, 7.1, 7.2 в непрерывном режиме выполняют пересылку собранных данных на центральный сервер 8, а именно:
ведущие БПЛА:
а) Комплексная модель участка ЛЭП и охранной зоны на основе облака точек, в котором каждая точка имеет следующее описание:
<x,y,z,c,t,u,id, ids>
где x,y,z – пространственные координаты точки; c – цветность; t – пиксель термограммы, соответствующий точке x,y,z; u –пиксель изображения в УФ-диапазоне, соответствующий точке x,y,z; id – идентификатор объекта, которому принадлежит данная точка (если точка не принадлежит объекту, то id=null); ids – идентификатор опасной ситуации (различаемой БПЛА самолетного типа), которой принадлежит данная точка (если точка не принадлежит опасной ситуации, то ids=null).
б) Перечень идентифицированных элементов ЛЭП, а также объектов охранной зоны, состоящий из элементов следующего вида:
<id,to, gc>, где id – идентификатор объекта, to – тип (класс) объекта, gc – географические координаты объекта.
в) Перечень идентифицированных угроз и опасных ситуаций, состоящий из элементов следующего вида:
<ids,ts, gc>, где ids – идентификатор опасной ситуации, ts – тип (класс) опасной ситуации, gc – географические координаты опасной ситуации.
вспомогательные БПЛА:
а) Комплексные модели элементов ЛЭП, объектов охранной зоны, угроз, опасных ситуаций на основе облака точек, в котором каждая точка имеет следующее описание:
<x,y,z,c,t,u,id, ids>
где x,y,z – пространственные координаты точки; c – цветность; t – пиксель термограммы, соответствующий точке x,y,z; u –пиксель изображения в УФ-диапазоне, соответствующий точке x,y,z; id – идентификатор объекта, которому принадлежит данная точка (если точка не принадлежит объекту, то id=null); ids – идентификатор опасной ситуации (различаемой БПЛА самолетного типа), которой принадлежит данная точка (если точка не принадлежит опасной ситуации, то ids=null).
б) Перечень идентифицированных угроз и опасных ситуаций (дополненный после более детального обследования элементов ЛЭП и объектов охранной зоны), состоящий из элементов следующего вида:
<ids,ts, gc>, где ids – идентификатор опасной ситуации, ts – тип (класс) опасной ситуации, gc – географические координаты опасной ситуации.
4) БПЛА 4.1-4.3, 5.1, 5.2, 6.1, 6.2, 7.1, 7.2 периодически выполняет самодиагностику. При этом контролируются следующие параметры: текущий уровень топлива, состояние микропроцессоров, памяти, приводов, датчиков, навигационной подсистемы.
4.1) Если обнаружены критические неполадки микропроцессоров, памяти, приводов, датчиков (лазерный сканер), навигационной подсистемы принимается решение о срочном возвращении на станцию базирования 10.
а) Выбывший ведущий БПЛА 4.1-4.3 заменяется вспомогательным БПЛА в зависимости от оценки его состояния, которая включает:
- текущий уровень топлива;
- расстояние до выбывшего ведущего БПЛА.
Вспомогательные БПЛА 5.1, 5.2, 6.1, 6.2, 7.1, 7.2 самостоятельно формируют оценки собственного состояния и пересылают их на центральный сервер 8. Центральный сервер 8 по результатам анализа полученных оценок назначает нового ведущего БПЛА из числа вспомогательных БПЛА взамен выбывшего.
б) Минимально допустимый состав группы для продолжения обследования ЛЭП в случае выбытия отдельных БПЛА:
- количество ведущих БПЛА должно сохраняться на уровне по состоянию на начало обследования ЛЭП;
- ведущий БПЛА, выполняющий съемку непосредственно ЛЭП (а не охранной зоны) должен иметь как минимум два вспомогательных БПЛА;
- для ведущих БПЛА, выполняющих съемку охранной зоны, допускается отсутствие вспомогательных БПЛА.
в) Выбывший вспомогательный БПЛА 5.1, 5.2, 6.1, 6.2, 7.1, 7.2, находящийся в подчинении ведущего БПЛА, выполняющего съемку непосредственно ЛЭП, заменяется другим вспомогательным БПЛА, подчиненным ведущему БПЛА, выполняющему съемку охранной зоны. Выбор вспомогательного БПЛА для замены выполняется в зависимости от оценки его состояния, которая включает:
- текущий уровень топлива;
- расстояние до выбывшего ведущего БПЛА.
Вспомогательные БПЛА 5.1, 5.2, 6.1, 6.2, 7.1, 7.2 самостоятельно формируют оценки собственного состояния и пересылают их на центральный сервер 8. Центральный сервер 8 по результатам анализа полученных оценок назначает нового ведущего БПЛА из числа вспомогательных БПЛА взамен выбывшего.
4.2) В случае диагностирования у ведущего БПЛА неисправности ИК-камеры или УФ камеры, он переводится в разряд вспомогательных БПЛА, при этом назначение на замену ему ведущего БПЛА выполняется в соответствии с п. 4.1 (а).
4.3) В случае диагностирования у вспомогательного БПЛА (управляемого ведущим БПЛА, выполняющим съемку непосредственно ЛЭП) неисправности ИК-камеры или УФ-камеры, он заменяется на вспомогательный БПЛА, подчиняющийся ведущему БПЛА, выполняющему съемку охранной зоны в соответсвии с п. 4.1 (в).
4.4) В случае, если у БПЛА обнаружен низкий уровень топлива, то принимается решение о его немедленном перемещении к ближайшему автоматическому комплексу обслуживания 9. Решения о замене БПЛА или о прекращении обследования ЛЭП и возвращения всех БПЛА на базовую станцию 10 принимаются в соответствии с п. 4.1.
5) Центральный сервер 8 по полученным от БПЛА 4.1-4.3, 5.1, 5.2, 6.1, 6.2, 7.1, 7.2 (комплексная модель участка ЛЭП и охранной зоны; комплексные модели элементов ЛЭП, объектов охранной зоны, угроз, опасных ситуаций; перечень идентифицированных элементов ЛЭП, а также объектов охранной зоны; перечень идентифицированных угроз и опасных ситуаций) формирует комплексную модель ЛЭП 1.
5.1) Комплексная модель ЛЭП включает:
- трехмерную модель ЛЭП и охранной зоны;
- ИК-модель ЛЭП и охранной зоны;
- УФ-модель ЛЭП и охранной зоны;
- детализованные трехмерные, ИК, УФ-модели отдельных элементов ЛЭП с указанием типов и географических координат этих элементов.
5.2) Центральный сервер выполняет анализ трехмерной модели ЛЭП и охранной зоны с целью определения следующих параметров:
- стрела провиса проводов;
- угол наклона опор ЛЭП;
- смещение опор ЛЭП.
5.3) На основании трехмерной модели ЛЭП и охранной зоны центральный сервер выполняет выявление новых опасных ситуаций («пляска проводов»).
5.4) На основании ретроспективных комплексных моделей ЛЭП выполняет прогнозирование развития идентифицированных угроз и опасных ситуаций.
5.5) На основании комплексной модели ЛЭП, а также данных, полученных в результате выполнения п. 5.2-5.4 формируется перечень рекомендаций для ЛПР по устранению выявленных на ЛЭП угроз и опасных ситуаций.
Далее приводится описание работы центрального сервера (см. фиг. 2).
Процесс работы центрального сервера предполагает работу в следующих режимах:
Режим 1. Формирование полетного задания для БПЛА.
Режим 2. Обработка данных, полученных от БПЛА.
1) Ниже приводится описание режима 1.
ЛПР через устройство ввода 17 загружает координаты начальной и конечной точек траектории полета БПЛА, а также описание ЛЭП, исходя из которого определяется число БПЛА разных типов (ведущие, вспомогательные), используемых для ее обследования. Блок генерации полетного задания 14.1 на основании этой информации выполняет генерацию полетного задания для БПЛА
Далее полетное задание через приемо-передающую антенну 12 передается на БПЛА.
2) Ниже приводится описание режима 2.
На данном этапе центральный сервер оперирует следующими данными:
а) Комплексная модель участка ЛЭП и охранной зоны.
б) Комплексные модели элементов ЛЭП, объектов охранной зоны, угроз, опасных ситуаций.
в) Перечень идентифицированных элементов ЛЭП, а также объектов охранной зоны.
г) Перечень идентифицированных угроз и опасных ситуаций.
С БПЛА на приемо-передающую антенну 12 поступают данные а-г, которые затем передаются на блоки 13.1 и 13.3. Множества в) и г) передаются с блока 13.1 на базу знаний подсистемы обработки данных, полученных от БПЛА (15.1).
Блок 13.1 на основании значений параметров x, y, z, c множеств а) и б) формирует трехмерную модель ЛЭП и охранной зоны, выделяя при этом идентифицированные объекты (на основании параметра id множества а)). Полученная трехмерная модель передается на блок 13.4.
Блок 13.2 формирует УФ-модель ЛЭП и окружающего ее пространства на основании значений параметров x,y,z,u множеств а), выделяя при этом идентифицированные ситуации (на основании параметра ids множества а)). Полученная УФ-модель передается на блок 13.4.
Блок 13.3 формирует ИК-модель ЛЭП и окружающего ее пространства на основании значений параметров x,y,z,t множеств а), выделяя при этом идентифицированные ситуации (на основании параметра ids множества а)). Полученная ИК-модель передается на блок 13.4.
Блок 13.4 выполняет сопоставление построенных трехмерной, УФ, ИК-моделей (путем определения соответствия между точками этих моделей), выход блока – комплексная модель ЛЭП, которая передается на блоки 14.1, 14.2, 14.3.
Блок 14.1 на основании полученной комплексной модели ЛЭП дополняет полетные задания для БПЛА, транслируя следующую информацию:
I1={StS,M,T=<p1,p2,…,pN>,IDD,RP}, где StS – используемая карта состояний, при этом под состоянием понимается некоторый сектор в трехмерном пространстве; M – карта внешней среды (содержит данные о координатах элементов ЛЭП, а также объектов, расположенных вблизи ЛЭП (например, деревья)), построенная на StS по результатам, полученным от БПЛА; T – множество контрольных точек на карте M (точка соответствует состоянию), корректирующих маршрут БПЛА, и являющих обязательными для посещения (сообщение об их достижении формируется на блоке 34 и передается на центральный сервер через приемо-передающую антенну 33, см. фиг. 3); IDD=<idD,cl> – множество уникальных идентификаторов БПЛА, выполняющих обследование ЛЭП, где idD – уникальный идентификатор БПЛА, cl – класс БПЛА; RP – координаты автоматических комплексов обслуживания. При этом контрольные точки p1, p2,…, pN подбираются с учетом наличия на комплексной модели следующих элементов для их более детального обследования с помощью БПЛА: элементы ЛЭП, объекты охранной зоны ЛЭП, идентифицированные угрозы и опасные ситуации.
Если обследование ЛЭП выполняется впервые и ретроспективная комплексная модель ЛЭП отсутствует, полетное задание дополняется следующей информацией:
I2={StS, T=<p1,p2,…,pN>,IDD,RP}, где StS – используемая карта состояний, автоматически генерируемая для некоторого сектора в пространстве, в котором находится ЛЭП, при этом под состоянием понимается некоторый сектор в трехмерном пространстве; IDD=<idD,cl> – множество уникальных идентификаторов БПЛА, выполняющих обследование ЛЭП, где idD – уникальный идентификатор БПЛА, cl – класс БПЛА; RP – координаты автоматических комплексов обслуживания. При этом контрольные точки p1, p2,…, pN подбираются с учетом наличия на комплексной модели следующих элементов для их более детального обследования с помощью БПЛА: элементы ЛЭП, объекты охранной зоны ЛЭП, идентифицированные угрозы и опасные ситуации. При этом по мере обработки данных, поступающих от группы БПЛА, множество I2 примет вид I1.
Блок 14.1 также выполняет сбор и анализ оценок собственного состояния БПЛА (в случае выбытия одного или нескольких БПЛА группы), по результатам которого может изменять тип БПЛА (с вспомогательного на ведущий), а также осуществляет переподчинение вспомогательных БПЛА между ведущими БПЛА.
Сформированные блоком 14.1 полетные задания передаются на приемо-передающую антенну для дальнейшей рассылки на БПЛА вертолетного типа.
Блок 14.2 запрашивает в базе 15.2 ретроспективные комплексные модели данной ЛЭП, сопоставляет с текущей моделью (полученной от блока 13.4) и формирует прогноз развития идентифицированных угроз и опасных ситуаций, который передается на блок 14.3.
Блок 14.3 на основании комплексной модели ЛЭП также определяет следующие дополнительные параметры:
- стрела провиса проводов;
- угол наклона опор ЛЭП;
- смещение опор ЛЭП.
Блок 14.3 на основании комплексной модели ЛЭП, результатов прогнозирования развития идентифицированных угроз и опасных ситуаций, дополнительных параметров формирует перечень рекомендаций ЛПР по устранению выявленных на ЛЭП угроз и опасных ситуаций, которые предаются ЛПР через устройство вывода 16.
Подсистема обработки данных, полученных от БПЛА, подсистема принятия решений, подсистема управления памятью составляют в совокупности аппаратно-программный комплекс центрального сервера.
Далее приводится описание работы БПЛА (см. фиг. 3).
Данные, получаемые от датчиков подсистемы машинного зрения 18 (а именно, для ведущих БПЛА – комплексная модель участка ЛЭП и охранной зоны; перечень идентифицированных элементов ЛЭП, а также объектов охранной зоны; перечень идентифицированных угроз и опасных ситуаций; для вспомогательных БПЛА - комплексные модели элементов ЛЭП, объектов охранной зоны, угроз, опасных ситуаций; перечень идентифицированных угроз и опасных ситуаций), поступают на буфер собранных данных 23, который осуществляет их передачу на центральный сервер через приемо-передающую антенну 33. Весовые коэффициенты сверточной нейронной сети, используемые при обработке данных, полученных от лазерного сканирующего устройства, передаются на подсистему машинного зрения 18 от блока хранения весовых коэффициентов сверточной нейронной сети 22. Подсистема навигации 19 (а именно, блок 34) передает на подсистему машинного зрения 18 географические координаты БПЛА. Сформированная комплексная модель участка ЛЭП и охранной зоны, а также множество идентифицированных и сегментированных объектов передаются на блок 25.
Блок координации 29 ведет обмен сообщениями с другими БПЛА. Эти сообщения могут быть следующих видов:
1) «Сообщение о намерениях» (формирование собственных сообщений, передача их другим БПЛА, получение от них аналогичных сообщений) – сообщение, в котором БПЛА сообщает другим аналогичным БПЛА о действиях, которые он собирается выполнить. Эти сообщения имеют следующий формат:
<idD,t,T,TS>,
где idD – уникальный идентификатор БПЛА, отправившего сообщение, t=<t1,t2,…,tN> - временной лаг, TS – информация о техническом состоянии БПЛА, T – построенная траектория, которая записывается в следующем формате:
{<BS1,A1,FS1>,<BS2,A2,FS2>,…,<BSN,AN,FSN>},
где BS1, BS2, BSN – предыдущее состояние (в котором находился БПЛА); A1, A2, AN - предполагаемое примитивное действие, которое выполнит БПЛА для перехода в состояние FS1, FS2, FSN, при этом достижение состояния FS1 предполагается с временным лагом t1, состояния FS2 – с временным лагом t2 , FSN – с временным лагом tN. Под состоянием понимается некоторый сектор в пространстве, обозначенный на карте состояний, транслируемой от центрального сервера вместе с полетным заданием. Состояние имеет следующий формат:
<C,O>, где C – массив пространственных координат, описывающих данное состояние, O=<id,to> – идентификатор (id) и тип (to) объекта, полностью или частично расположенного в данном состоянии.
2) «Траектория» - массив данных в следующем формате:
{idD,T1=<BS1,A1,FS1>,T2==<BS2=FS1,A2,FS2=BS3>,…,TN=<BSN=FSN-1,AN,FSN>}, где idD – уникальный идентификатор БПЛА, отправившего сообщение; BS1, BS2, BSN - предыдущее состояние (в котором находился БПЛА); A1, A2, AN - предполагаемое примитивное действие (вперед, назад, вправо, влево, вверх, вниз), которое выполнит БПЛА для перехода в состояние FS1, FS2, FSN.
3) «Директива для вспомогательного БПЛА» (формируется ведущим БПЛА). Представляет массив элементов следующего вида:
< idD, id, type, gc>,
где idD – уникальный идентификатор БПЛА вертолетного типа, отправившего сообщение; id - идентификатор элемента ЛЭП, объекта охранной зоны, опасной ситуации, подлежащих более детальному обследованию; type – тип элемента ЛЭП, объекта охранной зоны, опасной ситуации, подлежащих более детальному обследованию; gc – географические координаты элемента ЛЭП, объекта охранной зоны, опасной ситуации, подлежащих более детальному обследованию.
Блок координации 29 записывает полетное задание в базу знаний подсистемы управления 32.
Блок координации 29 передает полученные от других БПЛА (через приемо-передающую антенну) «траектории» (для БПЛА обоих типов), «сообщения о намерениях» (для БПЛА обоих типов), «директивы для вспомогательного БПЛА» (только для вспомогательных БПЛА) на блок прогнозирования траектории полета 26.
Блок прогнозирования траектории полета 26 выполняет прогнозирование траектории БПЛА на период t на основании следующих параметров:
1) «Полетное задание», полученное от центрального сервера через приемо-передающую антенну 33.
2) «Траектории» других БПЛА, которые учитываются с целью исключения дублирования траекторий, уже пройденных другими БПЛА.
3) «Сообщения о намерениях» других БПЛА, которые учитываются с целью снижения риска столкновения БПЛА друг с другом.
4) Полученные «директивы для вспомогательных БПЛА».
5) Информация о техническом состоянии БПЛА, получаемая от блока самодиагностики 30. В том случае, если прогнозируемая траектория данного БПЛА пересекается с прогнозируемыми траекториями других БПЛА (состояние, в котором пересекаются траектории далее будет назваться «спорным»), которые содержатся в полученных «сообщениях о намерениях», выполняется анализ информации о техническом состоянии данного БПЛА, а также других БПЛА (содержится в «сообщениях о намерениях») по следующим параметрам:
- текущее состояние (на карте состояний) – приоритетом пользуется БПЛА, находящийся ближе к спорному состоянию;
- текущий уровень топлива – приоритетом пользуется БПЛА с уровнем топлива;
- освобожден ли буфер собранных данных 23 для приема новой информации – приоритетом пользуются БПЛА с менее заполненным буфером памяти.
При этом информация о текущем состоянии данного БПЛА получается от блока 34.
Блок прогнозирования траектории полета 26 передает спрогнозированную траекторию на блок управления 25.
Блок управления 25 выполняет обработку следующей информации:
1) Спрогнозированная траектория полета БПЛА, полученная от блока 26.
2) Информация о техническом состоянии БПЛА, передаваемая от блока самодиагностики 30.
3) Комплексная модель участка ЛЭП и охранной зоны с указанием распознанных объектов, передаваемая от подсистемы машинного зрения 18.
4) Карта внешней среды, запрашиваемая в базе знаний подсистемы управления 32.
Блок управления 25 уточняет карту внешней среды на основании комплексной модели участка ЛЭП и охранной зоны с указанием распознанных объектов, полученной от блока 26. При этом под уточнением понимается нанесение на карту внешней среды объектов, отсутствующих на ней, но при этом обнаруженных подсистемой машинного зрения 18.
Блок управления 25 сопоставляет траекторию, полученную от блока 26, с комплексной моделью участка ЛЭП и охранной зоны с указанием распознанных объектов (отражает текущее состояние внешней среды) с целью выявления статических и динамических объектов (на принадлежащих к числу БПЛА, принадлежащих системе дистанционного мониторинга состояния ЛЭП), являющихся препятствиями для полета БПЛА. В случае обнаружения таких препятствий, блок управления 25 запрашивает в базе знаний подсистемы управления 32 подпрограмму (представлена в виде траектории), содержащую набор инструкций для их обхода. Блок 25 интегрирует подпрограмму в траекторию, спрогнозированную блоком 26, формируя «допущенную траекторию», которую далее передает на блок 29 для формирования и рассылки другим БПЛА «сообщения о намерениях».
«Допущенная траектория» конвертируется во множество инструкций, которые передаются на блок формирования управляющих воздействий 27, который выполняет их перевод в набор управляющих воздействия для привода 28.
Блок управления 25 формирует «директивы для вспомогательных БПЛА», которые далее передает на блок 29 для формирования и рассылки вспомогательным БПЛА.
Блок управления 25 выполняет анализ информации о состоянии БПЛА (см. п. 4 описания процесса функционирования системы (см. фиг. 1)).
Подсистема машинного зрения, подсистема управления памятью, подсистема управления, подсистема навигации объединены в аппаратно-программный комплекс геликоптера.
Далее приводится описание работы подсистемы машинного зрения БПЛА (см. фиг. 4).
Блок 3D-реконструкции 41 формирует трехмерную модель ЛЭП и охранной зоны (для ведущих БПЛА), трехмерные модели элементов ЛЭП, объектов охранной зоны, угроз, опасных ситуаций (для вспомогательных БПЛА) на основании облака точек, полученного от лазерного сканера 38, входящего в комплект бортовых датчиков 37. Далее трехмерная модель передается на блок распознавания образов 44, основанный на применении сверточной нейронной сети (весовые коэффициенты загружаются с блока 52). Блок распознавания образов 44 выполняет идентификацию и сегментацию на трехмерной модели элементов ЛЭП и объектов охранной зоны, а также выявление угроз и опасных ситуаций, идентификация которых возможна по результатам лазерного сканирования (например, повреждения опор ЛЭП). Результатом работы блока 44 является перечень идентифицированных элементов ЛЭП, а также объектов охранной зоны, перечень идентифицированных блоком 44 угроз и опасных ситуаций, при этом для каждого элемента этих перечней записываются географические координаты, которые вычисляются на основе географических координат БПЛА, полученных от блока обработки информации с глобальных навигационных систем 47 подсистемы навигации 46. Далее трехмерную модель ЛЭП и охранной зоны (для ведущих БПЛА), трехмерные модели элементов ЛЭП, объектов охранной зоны, угроз, опасных ситуаций (для вспомогательных БПЛА), перечень идентифицированных элементов ЛЭП, а также объектов охранной зоны, перечень идентифицированных блоком 44 угроз и опасных ситуаций передаются на блок комплексирования информации 45.
Блок анализа данных ИК-съемки 42 на основании данных ИК-сканирования, полученных от ИК-камеры 39, входящей в комплект бортовых датчиков 37, формирует ИК-модель ЛЭП и охранной зоны (для ведущих БПЛА), ИК-модели элементов ЛЭП, объектов охранной зоны (для вспомогательных БПЛА), на основании которых выполняется распознавание угроз и опасных ситуаций (например, перегрев проводов) и формируется перечень идентифицированных блоком 42 угроз и опасных ситуаций. Полученные ИК-модель ЛЭП и охранной зоны (для ведущих БПЛА), ИК-модели элементов ЛЭП, объектов охранной зоны (для вспомогательных БПЛА), перечень идентифицированных блоком 42 угроз и опасных ситуаций передаются на блок комплексирования информации 45.
Блок анализа данных УФ-съемки 43 на основании данных УФ-сканирования, полученных от УФ-камеры 40, входящей в комплект бортовых датчиков 37, формирует УФ-модель ЛЭП и охранной зоны (для ведущих БПЛА), УФ-модели элементов ЛЭП, объектов охранной зоны (для вспомогательных БПЛА), на основании которых выполняется распознавание угроз и опасных ситуаций (например, коронные разряды на дефектных изоляторах) и формируется перечень идентифицированных блоком 43 угроз и опасных ситуаций. Полученные УФ-модель ЛЭП и охранной зоны (для ведущих БПЛА), УФ-модели элементов ЛЭП, объектов охранной зоны (для вспомогательных БПЛА), перечень идентифицированных блоком 43 угроз и опасных ситуаций передаются на блок комплексирования информации 45.
В блоке комплексирования информации 45 выполняется сопоставление данных, полученных от блоков 42-44 (а именно, трехмерная модель ЛЭП и охранной зоны; трехмерные модели элементов ЛЭП, объектов охранной зоны, угроз, опасных ситуаций; перечень идентифицированных элементов ЛЭП, а также объектов охранной зоны; перечень идентифицированных блоком 44 угроз и опасных ситуаций; ИК-модель ЛЭП и охранной зоны; ИК-модели элементов ЛЭП, объектов охранной зоны; перечень идентифицированных блоком 42 угроз и опасных ситуаций; УФ-модель ЛЭП и охранной зоны; УФ-модели элементов ЛЭП, объектов охранной зоны; перечень идентифицированных блоком 43 угроз и опасных ситуаций), формирование комплексной модели участка ЛЭП и объектов охранной зоны (для ведущих БПЛА); комплексных моделей элементов ЛЭП, объектов охранной зоны, угроз, опасных ситуаций; перечень идентифицированных элементов ЛЭП, а также объектов охранной зоны, перечень идентифицированных угроз и опасных ситуаций.
Выходные данные блока 45 записываются в буфер собранных данных 53, а также передаются на блок управления 49.
Заявляемое изобретение иллюстрируется следующими примерами.
Для обследования ВЛ-110 кВ достаточно группы БПЛА в составе:
- два ведущих БПЛА (для охвата охранной зоны, а также ЛЭП с обоих сторон);
- четыре вспомогательных БПЛА.
Один из ведущих БПЛА выполняет сканирование ЛЭП, по результатам которого формируется комплексная модель участка ЛЭП и охранной зоны, которая сохраняется в буфере собранных данных, из которого через приемо-передающую антенну передаются на центральный сервер. Центральный сервер получает комплексные модели участков ЛЭП и охранной зоны, на основании которых формирует единую комплексную модель ЛЭП, которая в дальнейшем может быть использована, например, для принятия решений о реконструкции ЛЭП. Центральный сервер анализирует информацию, полученную от БПЛА, определяет ряд дополнительных параметров (стрела провиса проводов; угол наклона опор ЛЭП; смещение опор ЛЭП), выполняет прогнозирование развития выявленных угроз и опасных ситуаций (например, распределение вероятности падения поврежденной опоры за различные временные интервалы). По результатам анализа центральный сервер формирует перечень рекомендаций для ЛПР (лицо, принимающее решения), например, «срочно выполнить ремонт опоры A», «замену изолятора B», «выполнить очистку охранной зоны от деревьев и кустарника на участке C» и т.д.
По результатам анализа результатов сканирования подсистемой машинного зрения ведущего БПЛА формируется перечень идентифицированных элементов ЛЭП, включающий, например, некоторый изолятор N, при этом, если подсистема машинного зрения ведущего БПЛА обнаружила его повреждения, то подсистема управления ведущего БПЛА отправляет директиву вспомогательному БПЛА, предусматривающую дополнительное обследование изолятора N с меньшего расстояния. Вспомогательный БПЛА выполняет поступившую директиву, подтверждает (или не подтверждает выводы, сделанные ведущим БПЛА), отправляет собранную информацию на центральный сервер, формирует сообщение для других БПЛА, в котором изолятор N отмечен как обследованный (в дальнейшем другие вспомогательные БПЛА в случае поступления директив на обследование изолятора N будут их отклонять).
Таким образом, заявляемое изобретение позволяет выполнять сканирование ЛЭП и отдельных ее элементов, а также охранной зоны с помощью группы БПЛА (двух типов - ведущие, вспомогательные), формирующих комплексные модели ЛЭП и ее элементов, а также охранной зоны, идентифицирующих угрозы и опасные ситуации, передающих собранную информацию на центральный сервер для дальнейшего анализа, прогнозирования процесса развития угроз и опасных ситуаций, определения дополнительных параметров ЛЭП, формирования перечня рекомендаций для ЛПР; при этом БПЛА оснащены приемо-передающими антеннами, позволяющими установить прямую радиосвязь между БПЛА и центральным сервером; при этом БПЛА могут выполнить дозаправку и техническое обслуживание на автоматических комплексах обслуживания, которые устанавливаются из расчетного времени снижения уровня топлива БПЛА ниже заданного порога и включают приёмо-передающую антенну, реализующую радиомост с центральным сервером; что обеспечивает достижение технического результата.
Интеллектуальная система автоматического дистанционного мониторинга состояния ЛЭП, состоящая из группы всепогодных БПЛА, автоматизированного комплекса обслуживания, центра обработки информации и программного обеспечения, состоящего из двух программ, первая из которых отвечает за непосредственное управление БПЛА, а вторая установлена на центральном сервере и отвечает за прием и обработку информации. Обеспечивается повышение оперативности и точности диагностики состояния протяженных объектов. 4 ил.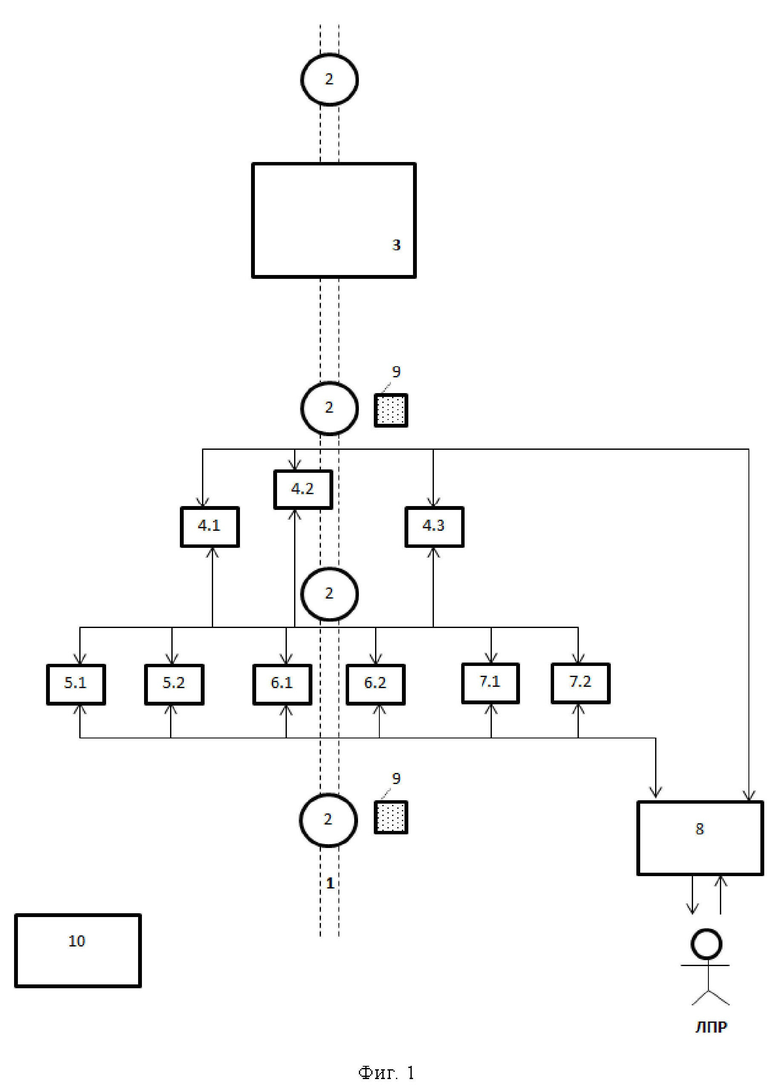
Интеллектуальная система автоматического дистанционного мониторинга состояния ЛЭП, состоящая из группы всепогодных БПЛА, автоматизированного комплекса обслуживания, центра обработки информации и программного обеспечения, при этом каждый БПЛА оснащен лазерным сканером, ИК-камерой, УФ-камерой, формирующими комплексную модель участка ЛЭП и охранной зоны, включающую трехмерную, ПК и УФ-модели, перечень идентифицированных элементов ЛЭП, а также объектов охранной зоны, перечень идентифицированных угроз и опасных ситуаций, и управляется двумя программами, при этом первая отвечает за непосредственное управление аппаратом, высоту, скорость полета, сканирование окружающего пространства и уклонение от столкновений, контролируя условия полета, формирует адекватную реакцию на изменение погодных условий, поддерживает канал связи и передачу информации, прием команд с центрального сервера, корректирует полетное задание, вторая программа установлена на центральном сервере и осуществляет прием и обработку данных, полученных с БПЛА, осуществляет аналитику видеопотока, формирует отчеты, команды на изменение полетного задания, архивирует информацию и высылает отчеты ответственным лицам, автоматический комплекс обслуживания обеспечивает прием БПЛА, анализ технического состояния, дозаправку, скачивает информацию, накопленную за время полета, на внутренние носители, обеспечивает вылет БПЛА по графику облета, передает информацию на центральный сервер, комплекс работает автономно, представляет собой бокс, в который приземляется БПЛА, в состав комплекса входят заправочная емкость и устройство для автоматической заправки, дополнительно бокс оборудован емкостью с жидкостью, препятствующей обледенению, и устройствами орошения винтов, при этом правление комплексом обслуживания осуществляется программным обеспечением, установленным на центральный сервер, центральный сервер выполнен с возможностью расположения в любом удобном для работы месте, осуществляет функции приема, накопления и хранения информации, обеспечивает постоянную аналитику получаемой информации, осуществляет рассылку, содержащую сведения аналитики, формирует сводную справку о результатах контроля и анализа происшествий и состояния контролируемых объектов, оборудования, осуществляет доступ сотрудников к архивам и базам данных, при этом БПЛА по уровню иерархии делятся на ведущие и вспомогательные, которые находятся в подчинении у ведущих и используются для более детального обследования ЛЭП и охранной зоны, число ведущих БПЛА составляет один на полосу шириной 30 м между правой и левой границами охранной зоны ЛЭП, число вспомогательных БПЛА на один ведущий БПЛА составляет два, если ведущий БПЛА выполняет обследование непосредственно ЛЭП, или один, если ведущий БПЛА выполняет обследование охранной зоны ЛЭП, кроме того, БПЛА вне зависимости от типа включает аппаратно-программный комплекс БПЛА, соответствующий первой программе, систему приводов, топливный бак, приемо-передающую антенну с радиусом охвата в 240 км, обеспечивающую радиомост непосредственно между БПЛА, между БПЛА и центральным сервером со скоростью не менее 50 Мбит/с, при этом аппаратно-программный комплекс БПЛА состоит из подсистемы машинного зрения, подсистемы управления памятью, подсистемы управления, подсистемы навигации, реализованной на базе навигатора GPS или ГЛОНАСС, при этом подсистема машинного зрения и подсистема управления интегрированы в прошивку отдельных высокопроизводительных микроконтроллеров, при этом подсистема машинного зрения включает комплект бортовых датчиков, включающий лазерное сканирующее устройство с функцией определения цветности точек, ИК-камеру, УФ-камеру, блок 3D-реконструкции, блок анализа данных ПК-съемки, блок анализа данных УФ-съемки, блок комплексирования информации, блок распознавания образов, подсистема управления памятью включает блок памяти допустимых значений диагностируемых параметров, блок хранения весовых коэффициентов сверточной нейронной сети, буфер собранных данных, базу знаний подсистемы управления, подсистема управления включает блок управления, блок прогнозирования траектории полета, блок формирования управляющих воздействий, блок координации, блок самодиагностики, кроме того, центральный сервер включает аппаратно-программный комплекс центрального сервера, соответствующий второй программе, приемо-передающую антенну с радиусом охвата в 240 км, обеспечивающую радиомост непосредственно между БПЛА, между БПЛА и центральным сервером со скоростью не менее 50 Мбит/с, устройство ввода, устройство вывода, при этом результатом работы центрального сервера является комплексная модель ЛЭП, включающая трехмерную модель ЛЭП и охранной зоны, ПК-модель ЛЭП и охранной зоны, УФ-модель ЛЭП и охранной зоны, детализованные трехмерные, ПК, УФ-модели отдельных элементов ЛЭП с указанием типов и географических координат этих элементов, стрела провиса проводов, угол наклона опор ЛЭП, смещение опор ЛЭП, прогноз развития идентифицированных угроз и опасных ситуаций, перечень рекомендаций для ЛПР по устранению выявленных на ЛЭП угроз и опасных ситуаций, кроме того автоматический комплекс обслуживания включает приемо-передающую антенну с радиусом охвата в 240 км, обеспечивающую радиомост с центральным сервером со скоростью не менее 50 Мбит/с.
| СПОСОБ ТРАЕКТОРНОГО УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ МОНИТОРИНГЕ ГОРОДСКОЙ ЗАСТРОЙКИ | 2021 |
|
RU2765758C1 |
| Способ и устройство бесконтактного дистанционного контроля технического состояния высоковольтных линейных изоляторов воздушных линий электропередач | 2020 |
|
RU2753811C1 |
| Способ цифрового управления процессом мониторинга, технического обслуживания и локального ремонта ВЛ и система для его осуществления | 2018 |
|
RU2683411C1 |
| СПОСОБ И ВОЗДУШНАЯ СИСТЕМА ДЛЯ ИНВЕНТАРИЗАЦИИ ЛЕСА (варианты) | 2013 |
|
RU2651377C2 |
| US 20200041560 A1), 06.02.2020. | |||

